D 6801:2019
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 分類······························································································································· 1
4 用語及び定義 ··················································································································· 2
D 6801:2019
(2)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
産業車両協会(JIVA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格
を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格
である。
これによって,JIS D 6801:1994は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
D 6801:2019
無人搬送車システムに関する用語
Vocabulary of automatic guided vehicle systems
序文
この規格は,1990年に無人搬送車類の用語として制定され,1994年の改正を経て今日に至っている。そ
の後の技術的な進展による,新たな関連用語及び従来の無人搬送車の定義に収まらない機種などの出現に
対応するために改正した。
なお,対応国際規格は現時点で制定されていない。
1
適用範囲
この規格は,無人搬送車システムに関する主な用語(以下,用語という。)及びその定義について規定す
る。ただし,有人・無人切替え形の車両を有人で使用するときはこの規格を適用しない。
注記 有人・無人切替え形の車両とは,人が搭乗して運転する車両及び無人搬送車としての安全要求
をそれぞれ満たし,切替えによって使い分けが可能なもの。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0140 コンベヤ用語
JIS B 9703 機械類の安全性−非常停止−設計原則
JIS D 6201 自走式産業車両−用語
3
分類
用語は,次のとおり分類する。
a) 無人搬送車及びそのシステム
b) 無人搬送車の分類
1) 一般的分類
2) 移載方式による分類
3) 自動走行方式による分類
c) 無人搬送車の機構・機能
1) 駆動
2) ステアリング
3) 誘導
4) 自律移動
2
D 6801:2019
5) 移載
6) 運転モード
7) その他
d) 無人搬送車の性能・特性
1) 走行・停止
2) 仕様
3) 寸法
4) 表示
e) 無人搬送車の安全性
1) 安全装置・機能
2) 警報・その他
f)
無人搬送車システムの構成
1) 機器・装置
2) 通信
3) 信号・検出
4) 充電
g) 無人搬送車システムの運用
1) 運用
2) データ設定
3) 運行・制御
4) レイアウト
h) 無人搬送車システムの安全性
1) 安全装置
2) 表示・警報・その他
4
用語及び定義
用語及び定義は,次のとおりとする。
なお,参考として対応英語を示す。
a) 無人搬送車及びそのシステム
番号
用語
定義
対応英語(参考)
0101 無人搬送車
一定の領域において,自動で走行し,荷など人以外の物品の搬
送を行う機能をもつ車両で,道路交通法に定められた道路では
使用しないもの。
automatic guided
vehicle
(automated
guided vehicle),
AGV,
driverless
industrial truck
0102 無人搬送車システム
1台,又は複数台の無人搬送車及びそれらの管理及び制御を行
うための装置の組合せ(図12参照)。
automatic guided
vehicle system,
AGVS
b) 無人搬送車の分類
1) 一般的分類
3
D 6801:2019
番号
用語
定義
対応英語(参考)
1101 積載形
荷を無人搬送車上に載せて搬送するもの(図1参照)。
loader type
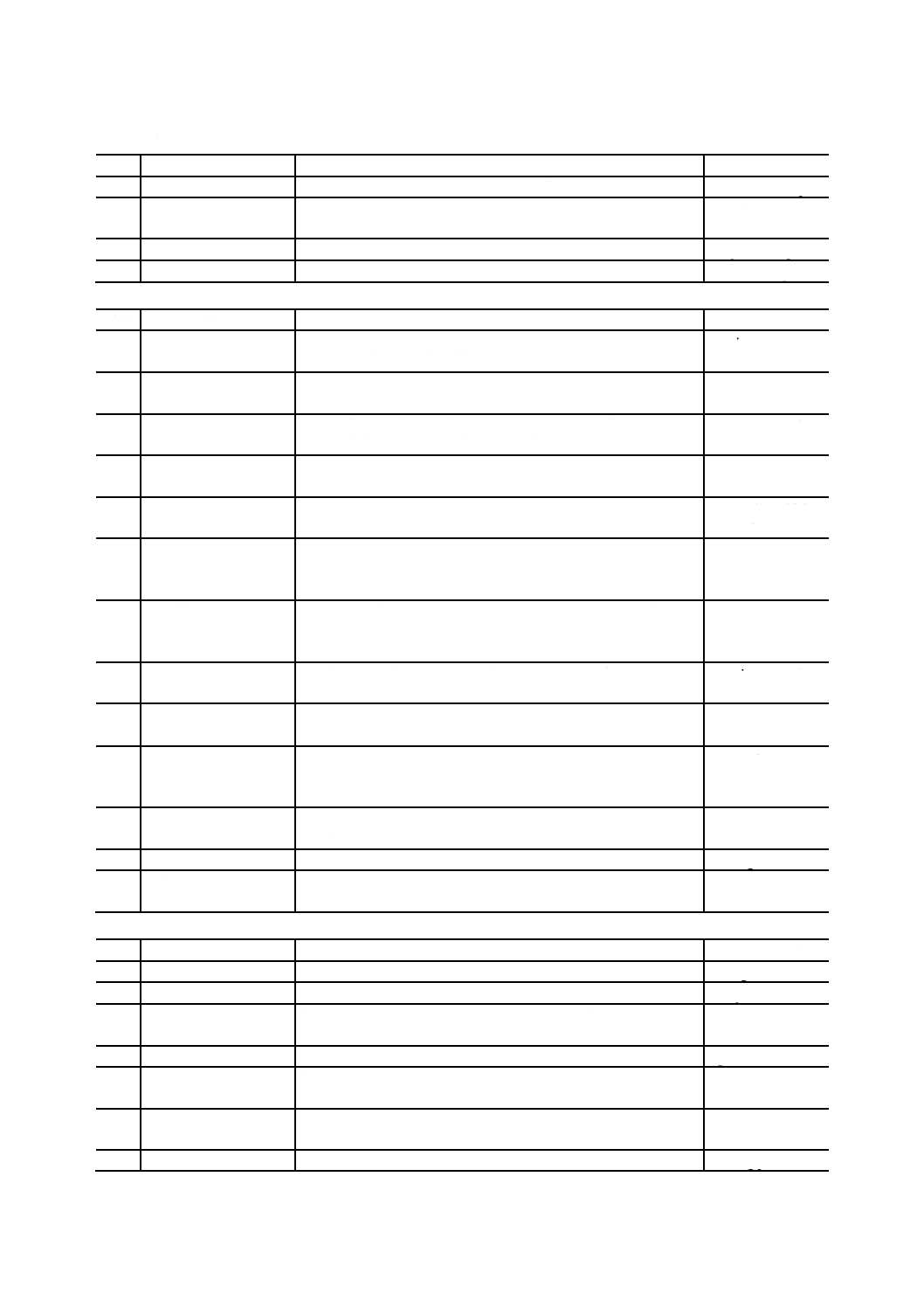
1102 けん引形
荷を積む台車又はトレーラをけん引して搬送するもの。
列車のようにけん引するもの及び台車の下に潜り込んでけん引
するものがある(図2参照)。
tractor type
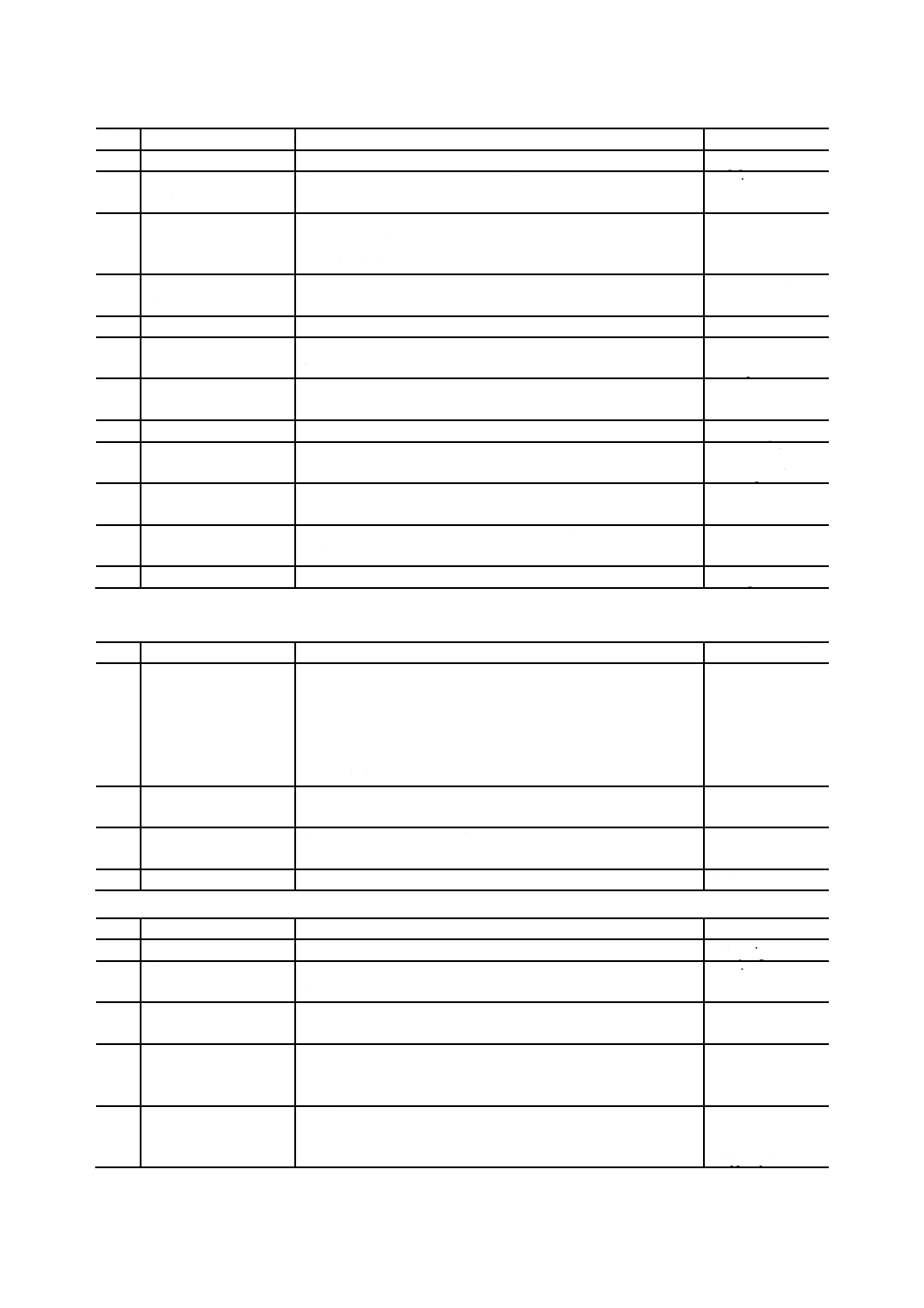
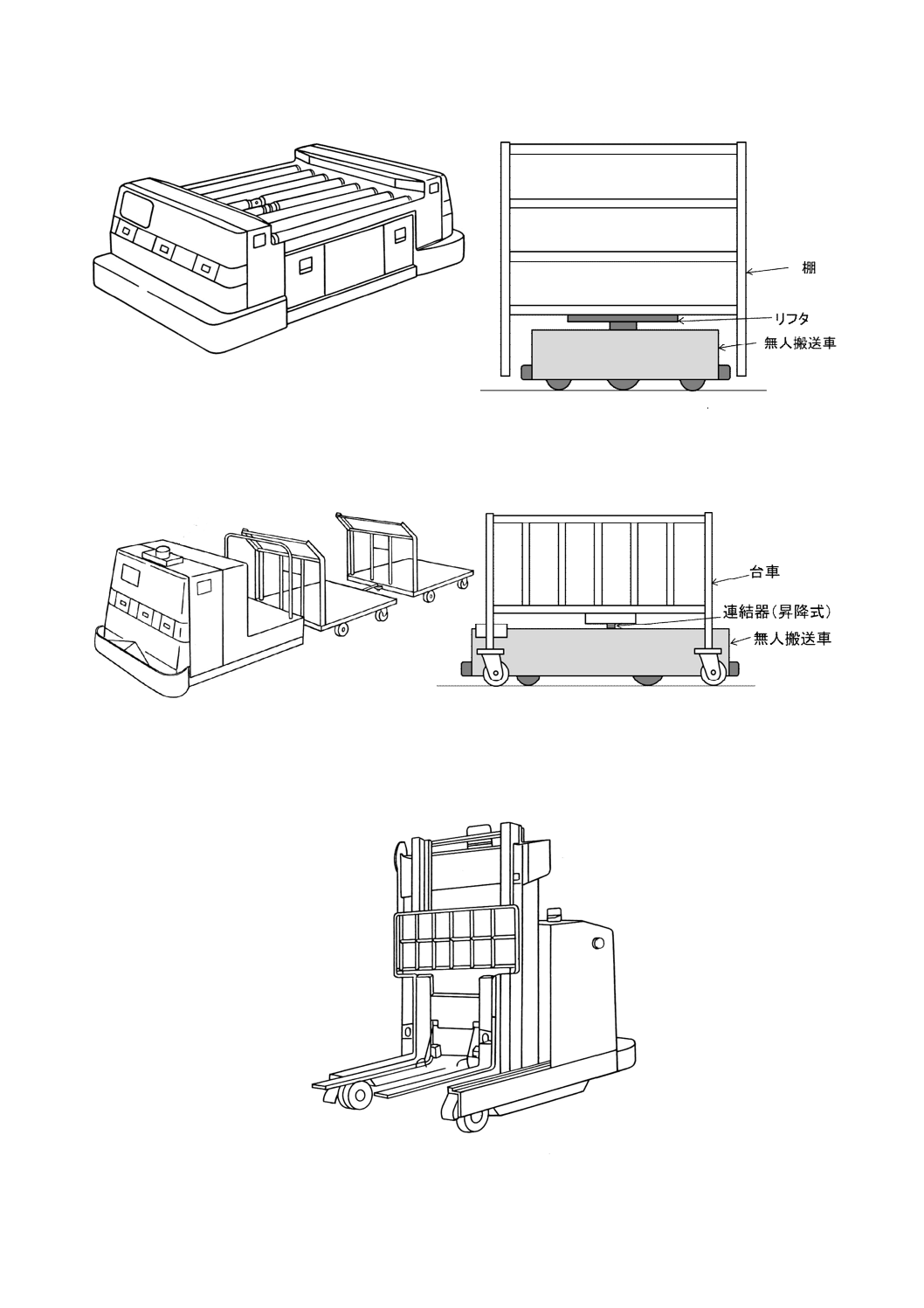
1103 フォークリフト形
積載形の一種であり,移載のためのフォークなど及びそれを上
下させるマストを備え,それらによって搬送するもの。フォー
クリフトの分類及び関連用語は,JIS D 6201による(図3参照)。
fork lift truck type
2) 移載方式による分類
番号
用語
定義
対応英語(参考)
1201 自動移載式
無人搬送車又は外部の動力によって自動的に荷の移載を行う方
式。
automatic transfer
1202 人手移載式
人手によって直接移載する方式(図4参照)。
manual transfer
3) 自動走行方式による分類
番号
用語
定義
対応英語(参考)
1301 経路誘導式
経路に沿って設置した誘導体によって誘導する方式。
誘導体には磁気テープ,光反射テープ,電磁誘導ケーブルなど
がある。
path guide
1302 自律移動式
無人搬送車自身のもつ自己位置推定機能,走行制御機能などに
よって,軌道,誘導体,人の操縦などがなくても目的地へ移動
する方式。
self-navigation
1303 追従式
自律移動式の一種であり,特定の人,先行する車両などに一定
の距離を保って追従して,自律的に走行する方式。
target guided
c) 無人搬送車の機構・機能
1) 駆動
番号
用語
定義
対応英語(参考)
2101 駆動輪
ドライブモータから出力された動力の伝達で回転し無人搬送車
を走行させるための車輪。
drive wheel
2102 従動輪
ドライブモータから出力された動力は伝達されず無人搬送車が
走行することで結果的に回転する車輪。
idler wheel
2103 ドライブモータ
駆動輪を駆動するモータ。
drive motor
2104 ホイールモータ
駆動輪に内蔵されたドライブモータ。インホイールモータと呼
ぶ場合もある。
wheel motor
2) ステアリング
番号
用語
定義
対応英語(参考)
2201 ステアリング機能
進行方向を決めるかじ(舵)取り機能。
steering
2202 ステアリングモータ
操だ(舵)輪の転がり方向を変えるための動力を発生するモー
タ。
steering motor
2203 ステアリング制御
無人搬送車を誘導又は移動させたい方向に走行させるために行
う制御。
steering control
2204 操だ輪
無人搬送車の進行方向を変えるためステアリングモータによっ
て転がり方向を変えられるように装着された車輪。
steering wheel
2205 操だ輪方式
操だ輪を一つ以上もつ操だ方式(図5参照)。
wheel steering
system
2206 二輪速度差方式
ステアリングモータをもたない操だ方法の一つで,無人搬送車
の左右に対向して駆動輪を配置し,それぞれを独立したドライ
ブモータで駆動するとともに,左右のモータ回転数に差を付け
ることで進行方向を決める操だ方式(図6参照)。
wheel speed
differential
system
4
D 6801:2019
番号
用語
定義
対応英語(参考)
2207 二輪速度差操だ輪方
式
ステアリングモータをもたない操だ方法の一つで,車両下部に
配した旋回座の左右に対向して駆動輪を配置し,それぞれを独
立したドライブモータで駆動するとともに,左右のモータ回転
数に差を付けることで車体に対する旋回座の角度を変えて旋回
座を一つの操だ輪として作用させる操だ方式(図7参照)。
旋回座は一つとは限らず複数の場合もある。
wheel speed
differential
steering system
2208 プログラムステアリ
ング
経路誘導式の無人搬送車が,一定区間を誘導体による誘導では
なく,あらかじめ設定された操だ手順で通過する機能。
program steering
3) 誘導
番号
用語
定義
対応英語(参考)
2301 誘導路
無人搬送車が走行する経路を示す仮想のライン(図8参照)。
guidepath
2302 誘導体
床内又は床上に設置された誘導のために使用される物体。
guide material
2303 電磁誘導式
床内又は床上に設置された誘導線に電流を通じ,発生する磁界
を探知して誘導する方式。
electromagnetic
guidance
2304 光学誘導式
床上に設置された誘導テープなどを光学的に検知して誘導する
方式。
optical reflection
guidance
2305 磁気誘導式
床内又は床上に設置された発磁体を磁気センサで検知して誘導
する方式。
magnet guidance
2306 磁性体誘導式
床内又は床上に設置された磁性体を磁性体センサで検知して誘
導する方式。
magnetism
guidance
2307 画像誘導式
床面に貼り付けられた有色のラインテープ,床上に塗布された
ラインなどをカメラで認識し,誘導する方式。
image guidance
4) 自律移動
番号
用語
定義
対応英語(参考)
2401 自己位置推定
無人搬送車に搭載されている様々なセンサの情報から,無人搬
送車の位置及び/又は姿勢を推定すること。
self-estimation for
the position
2402 ロスト
自律移動式の無人搬送車が自己位置推定をできなくなった状
態又は追従式の無人搬送車が追従対象を見失った状態。
lost
2403 デッドレコニング
既知の位置から走行した距離及び方向に基づき現在の位置及
び姿勢を逐次的に計算する自己位置推定方法。
dead reckoning
2404 定点補正
走行路の特定の点である定点付近を通過するごとに推定した
自己位置の誤差をリセットすること。
デッドレコニングによる自己位置推定では計算のたびに誤差
が積算するため一定区間ごとに正確な位置を示す定点を置き
誤差をリセットする必要がある。
定点として設置するものとしてRFID(5304参照),QRコード
(5305参照),磁石などがある。
regular calibration
2405 レーザ測距式
自己位置推定方法の一つで,壁などに設置した複数のリフレク
タ(反射板)までの距離を無人搬送車上のレーザレンジファイ
ンダで計測し,三角測量の原理で現在位置を推定する方式。デ
ッドレコニングのような誤差の積算はない。
laser distance
measurement
2406 レーザSLAM式
自己位置推定方法の一つで,壁,柱などの表面までの距離を無
人搬送車上のレーザレンジファインダで計測し,周囲の環境地
図を作製するとともに環境地図上の自己位置を推定する方式。
デッドレコニングのような誤差の積算はない。(SLAM:
Simultaneous Localization And Mapping)
SLAM using laser
5
D 6801:2019
番号
用語
定義
対応英語(参考)
2407 画像SLAM式
自己位置推定手法の一つで,壁,柱などの表面までの距離を無
人搬送車上の距離計測可能なカメラで計測し,周囲の環境地図
を作製するとともに環境地図上の自己位置を推定する方式。デ
ッドレコニングのような誤差の積算はない。
SLAM using
image
2408 レーザレンジファイ
ンダ,
LRF
レーザ光を方向を変えながらパルス状に照射し,物体に反射さ
れて返ってくるまでの時間から対象物までの距離,方向などを
測定するセンサ。
Lidar(Light Detection and Ranging)と呼ばれることもある。
laser range finder
5) 移載
番号
用語
定義
対応英語(参考)
2501 移載
荷の積卸しをすること。
transfer
2502 移載装置
車上と地上との間で移載を行う装置(図11参照)。
transfer equipment
2503 スライドフォーク
スライド機構及び昇降機構をもつ平板上に荷を載せて,無人搬
送車の停止位置と隣接した地上側移載装置との間で移載を行う
装置(図9参照)。
slide-fork top
2504 コンベヤ
ローラ,チェーンなどに荷を載せて,無人搬送車の停止位置と
隣接した地上側移載装置との間で移載を行う装置。コンベヤの
種類はJIS B 0140参照。
conveyor
2505 リフタ
昇降機構をもつ平板などの上に荷を載せて,無人搬送車が潜り
こんだ地上の荷置き台との間で移載を行う装置。(図10参照)。
lifter deck
2506 自動連結
けん引車とトレーラとの連結部がプログラム又は機械仕掛け
(からくり)などによって自動的に連結すること。
automatic coupling
2507 自動切離
けん引車とトレーラとの連結部がプログラム又は機械仕掛け
(からくり)などによって自動的に切離しすること。
automatic
uncoupling
2508 在荷,
載荷
装置上に荷がある状態のこと。
load presence
2509 空荷
装置上に荷がない状態のこと。
empty load
2510 荷積み
無人搬送車に荷を積み込む動作。
loading
2511 荷卸し
無人搬送車から荷を卸す動作。
unloading
2512 直積み
床面に直に置いてある荷を積み込む動作。
loading from floor
2513 直置き
床面に直に置く動作。
unloading on floor
2514 段積み
荷を多段積みする動作。
stacking
2515 段ばらし
多段積みされた荷をばらす動作。
dispensing,
destacking
6) 運転モード
番号
用語
定義
対応英語(参考)
2601 運転モード
無人搬送車の制御モード。
自動運転モード及び手動運転モードがある。
operation mode
2602 自動運転モード
無人搬送車が自動的に一連の走行及び荷役動作を行う運転モ
ード。
automatic mode
2603 手動運転モード
人が無人搬送車に設置された,又は接続された手動操作ボック
スを操作することで,無人搬送車が動く運転モード。
manual mode,
semi-automatic
mode
7) その他
番号
用語
定義
対応英語(参考)
2701 けん引車
動力装置をもった,けん引するための車両。
tractor
2702 トレーラ
動力付き車両にけん引されることを主用途として設計された,
走行のための動力装置をもたない被けん引車両。
trailer
6
D 6801:2019
番号
用語
定義
対応英語(参考)
2703 連結器
けん引車とトレーラ若しくは台車,又はトレーラ相互若しくは
台車相互との連結に用いる装置。
coupler
2704 車上制御装置
無人搬送車に搭載され車両の動作を制御する装置(図11参照)。 onboard controller
2705 手動操作ボックス,
手動操作ペンダント
無人搬送車を手動で操作するための機器を取り付けた装置。
manual operation
box
2706 速度制御
速度を上げる,下げる又は一定に保つ制御。
speed control
2707 車上操作パネル
無人搬送車に搭載され運転操作を行うことができる操作表示盤
(図11参照)。
onboard operator
panel
2708 センタリングコーン,
位置決めコーン
高精度位置決めを行うために設置したコーン形の位置合わせ部
品。
centering cone
2709 ブレーキ開放スイッ
チ
手動運転時だけ,無人搬送車のブレーキを無効にするためのス
イッチ。
brake release
switch
d) 無人搬送車の性能・特性
1) 走行・停止
番号
用語
定義
対応英語(参考)
3101 一方向走行
製造業者によって定義された前進方向に走行すること。
unidirectional
3102 双方向走行
製造業者によって定義された前進方向及び後進方向に走行する
こと。
bidirectional
3103 横行
製造業者によって定義された横方向へ走行すること。
traverse
3104 斜行
製造業者によって定義された斜め方向へ走行すること。
crabbing
3105 スピンターン
無人搬送車の中心線上の1点を回転軸としてその場で旋回する
こと。
spin turn
3106 全方向走行
双方向走行,横行,斜行及びスピンターンが可能なもの。
multidirectional
3107 停止
全ての車輪が止まっている状態。
stop
3108 発進
停止の状態から走行を開始すること。
start
3109 正常停止
あらかじめ決められたポイントに通常減速で停止すること。
regular stop
3110 異常停止
何らかの異常によって正常の停止点以外で停止すること。
irregular stop
3111 非常停止
システムの異常に対処し安全を確保するため,JIS B 9703の要
求事項に従って停止すること。
emergency stop
3112 緊急停止
システムの異常に対処し安全を確保するため急停止すること。 urgency stop
3113 一時停止
走行条件が成立しないため一時的に停止すること。
temporary stop
2) 仕様
番号
用語
定義
対応英語(参考)
3201 自重
荷の質量を除いた車両の総質量。
vehicle mass
3202 車両総質量
荷の質量を含めた車両の総質量。
gross vehicle mass
3203 定格荷重
積載能力の比較の目的のために定義される荷重であって,移載
装置などを付加しない状態で積載できる最大の質量。
rated capacity
3204 許容荷重
移載装置などを付加した状態で積載できる規定の質量。
load capacity
3205 輪重
無人搬送車の車輪にかかる分担質量。
load on wheel
3206 定格速度
製造業者によって定義された無人搬送車の走行速度。
rated speed
3207 走行速度
無人搬送車が走行するときの単位時間当たりの走行距離。
travelling speed
3208 最高速度
制御可能な最大の走行速度。
maximum speed
3209 定格けん引力
定格速度でのけん引力。
rated tractive force
3210 最大けん引力
平たんかつ強固な路面におけるけん引力の最大値。
maximum tractive
force
3211 登坂能力
無人搬送車が定格荷重を搭載又はけん引して,登ることができ
る最大斜度。
gradability
3212 走行精度
走行時における左右の振れ量。
travelling accuracy
7
D 6801:2019
番号
用語
定義
対応英語(参考)
3213 停止精度
同一条件,同一方法で停止したときの位置の誤差。
stopping accuracy
3214 高精度停止
停止精度を向上するため,機能を追加して,更に精度を向上し
て停止すること。
fine positioning
3215 移載精度
同一条件,同一方法で自動移載したときの荷の位置の誤差。
transfer accuracy
3216 速度精度
指示した速度に対する実際の走行速度の誤差
speed accuracy
3217 収束距離
カーブした誘導路を走行した直後一時的に崩れた誘導路と無人
搬送車との位置関係が正対するまでに要する距離。
astringent distance
3218 正対,
定位置
正常に前進及び後進できる無人搬送車と誘導路との位置関係又
は正常に移載できる無人搬送車とステーションコンベヤとの位
置関係。
correct position
3219 定格バッテリ容量
時間率で表現したバッテリ容量。
rated battery
capacity
3220 昇降速度
無人搬送車の移載装置昇降部分の動作速度。
elevating speed
3221 昇降ストローク
無人搬送車の移載装置昇降部分の最上位置と最下位置との間の
距離。
elevating length
3222 オーバハング
荷が車体幅及び車体長からはみ出していること。
overhang
3) 寸法
番号
用語
定義
対応英語(参考)
3301 ホイールベース
前輪と後輪との中心間距離。
wheel base
3302 トレッド
左右車輪の中心間距離。
tread
3303 車体寸法
最大の出っ張りを含む無人搬送車の三次元の寸法。
vehicle dimensions
3304 車体幅
最大の出っ張りを含む無人搬送車の幅。
vehicle width
3305 車体長
最大の出っ張りを含む無人搬送車の長さ。
vehicle length
3306 車体高
空車時における最も高い部分の高さ。
vehicle height
3307 移載高さ
荷を移載する場合の高さ。
transfer height
3308 搬送時最大寸法
荷も含めた最大の幅,長さ及び高さ。
maximum size
during transport
3309 最小旋回半径
無人搬送車が最も小さく旋回することができる半径。
minimum turning
radius
4) 表示
番号
用語
定義
対応英語(参考)
3401 銘板
無人搬送車本体に取り付けた,形式,自重,製造業者名などの
主要項目を列記したプレート(図11参照)。
identification plate
e) 無人搬送車の安全性
1) 安全装置・機能
番号
用語
定義
対応英語(参考)
4101 バンパ
無人搬送車が物理的接触時に停止するための信号を生成する装
置(図11参照)。
bumper
4102 障害物センサ
一定距離内の障害物(人など)を非接触で検出する装置(図11
参照)。
obstacle sensor
4103 警報装置
作業者に対して警報灯,警報音,標識又は表示のいずれかを用
いて警報を行う装置。
warning device
4104 非常停止ボタン
非常時に,無人搬送車を直ちに停止させるため無人搬送車又は
地上に設けられた押しボタン(図11参照)。
emergency stop
button
4105 進行方向表示灯
無人搬送車の進行方向を示す表示灯(図11参照)。
direction indicator
4106 脱線検出,
コースアウト検出
あらかじめ設定された許容値を超えて誘導路から外れたことの
検出。
out of track
detection
8
D 6801:2019
番号
用語
定義
対応英語(参考)
4107 オーバスピード検出
誘導路上のそれぞれの箇所にあらかじめ設定された速度を許容
量以上超えた速度となることの検出。
over speed
detection
4108 オーバラン検出
停止するべき位置で許容値を超えて停止することの検出。
over run detection
2) 警報・その他
番号
用語
定義
対応英語(参考)
4201 警報灯
地上又は車上に設けられた無人搬送車の接近,存在,状態など
を知らせる灯火。
warning lamp
4202 警報音
地上又は車上に設けられた無人搬送車の接近,存在,状態など
を知らせるブザー,チャイム,メロディなどの音。
warning sound
4203 警音器
警報音を発する装置。
warning sound
alarm
4204 警告表示
注意を喚起するため設けられた標識,マークなどの表示。
warning display
4205 移載異常
移載が正常に終了しないこと。
transfer device fail
4206 警報メッセージ
地上又は車上に設けられた無人搬送車の接近,存在,状態など
を知らせる音声(合成など)による警報。
warning voice
4207 オーバタイム検出
決められた動作時間の超過を検出すること。タイムオーバ検出
ともいう。
overtime detection
4208 走行オーバタイム検
出
走行動作に関するオーバタイム検出。
running overtime
detection
4209 移載オーバタイム検
出
移載開始から終了までの動作に関するオーバタイム検出。
transfer overtime
detection
4210 エラー表示
システムの異常(故障)状態を表示すること。
malfunction
indication
4211 荷姿異常
荷の許容される三次元寸法を超えた状態。
load condition fail
4212 荷正規位置検出
荷が許容範囲内の位置にあることを検出すること。
load tolerance
detection
4213 荷幅検出器
荷が無人搬送車からオーバハングした場合のオーバハングして
いる部分を検出する検出器。
load size checker
f)
無人搬送車システムの構成
1) 機器・装置
番号
用語
定義
対応英語(参考)
5101 地上制御装置
無人搬送車の運行の管理及び制御を行うため地上側に設けられ
る装置(図12参照)。
ground side
controller
5102 現場操作盤
移載現場に設置し無人搬送車を呼び出し又は搬送先を指示する
装置及び周辺装置の動作を指示するスイッチなどを配置した装
置。
local operation box
5103 搬送要求操作盤,
搬送要求操作ボック
ス
無人搬送車を呼び込むための操作機器を取り付けた装置(図12
参照)。
operation box for
call-in
5104 行先設定操作盤,
行先設定操作ボック
ス
無人搬送車の搬送先設定機器を取り付けた装置(図12参照)。 operation box for
destination
setting
5105 充電装置
無人搬送車のバッテリを充電する装置(図12参照)。
battery charger
5106 地上側移載装置
無人搬送車と荷を受渡しするために地上側に設けられる移載装
置(図12参照)。
load transfer
equipment
5107 交換用バッテリ
無人搬送車に使用する交換用のバッテリ。
interchangeable
battery
9
D 6801:2019
番号
用語
定義
対応英語(参考)
5108 バッテリ交換台車
交換用のバッテリを載せる台車。
cart for battery
exchange
2) 通信
番号
用語
定義
対応英語(参考)
5201 光通信装置,
光通信機,
OCD
光を利用して車上と地上との間でデータの送受信を行う装置。 optical
communication
device
5202 誘導無線装置,
誘導無線機
誘導無線を利用して車上と地上との間でデータの伝送を行う装
置。
inductive radio
communication
equipment
5203 無線装置,
無線機
無線を利用して車上と地上との間でデータの伝送を行う装置
(図12参照)。
radio
communication
equipment
5204 常時通信方式,
連続通信方式
走行路のどこでも無人搬送車と地上制御装置との通信を維持し
ている通信方式。
continuous
communication
method
5205 定点通信方式
走行路の特定の点で無人搬送車と地上制御装置との通信を行う
通信方式。
fixed point
communication
method
3) 信号・検出
番号
用語
定義
対応英語(参考)
5301 誘導センサ,
ガイドセンサ
経路誘導式の無人搬送車において,誘導体から発せられる信号
を非接触で受信する検出器。
guide sensor
5302 マークセンサ
床内又は床上に設置されたマークを検出する検出器。
mark sensor
5303 マーク
無人搬送車に情報を与えるために床内又は床上に設置されたバ
ーコード,RFID,磁石などの総称。
mark
5304 RFID,
トランスポンダ
電波を用いてタグのデータを非接触で読み書きするシステム。 radio frequency
identifier,
transponder
5305 QRコード
マトリックス形二次元シンボルの一種。
QR code
5306 移載信号
無人搬送車と地上設備との間で移載を開始,終了するなど同期
を求めるための信号(図12参照)。
transfer ordering
signal
4) 充電
番号
用語
定義
対応英語(参考)
5401 自動充電
稼働中に無人搬送車がバッテリ放電量を自動検知して自動的に
充電すること。
automatic battery
charge
5402 手動充電
作業者が無人搬送車及び充電装置を操作することによって充電
すること。
manual battery
charge
5403 車上充電
バッテリを無人搬送車に搭載した状態で充電すること。
onboard battery
charge
5404 地上充電
バッテリを無人搬送車から卸して充電すること。
offboard battery
charge
5405 非接触充電
接触式のカプラを用いることなく充電装置側からバッテリ側に
給電を行って充電すること。
inductive charging,
wireless charging
5406 自動バッテリ交換
無人搬送車上のバッテリと,地上側のバッテリとを自動的に交
換すること。
automatic battery
exchange
5407 手動バッテリ交換
無人搬送車上のバッテリと,地上側のバッテリとを人手によっ
て交換すること。
manual battery
exchange
10
D 6801:2019
番号
用語
定義
対応英語(参考)
5408 バッテリ自動接続
充電時に充電器とバッテリとを自動的に接続すること。
automatic
connection
between charger
and battery
5409 バッテリ手動接続
充電時に充電器とバッテリとを人手によって接続すること。
manual connection
between charger
and battery
g) 無人搬送車システムの運用
1) 運用
番号
用語
定義
対応英語(参考)
6101 オンライン運用
無人搬送車システムより上位にあるシステムから搬送指示が送
られてくる運用(図12参照)。
on-line mode
6102 オフライン運用
無人搬送車システムの地上制御装置に人が直接入力する情報又
は,制御盤の管理下にある装置からの情報で搬送指示が発生す
る運用。リモート運用ともいう(図12参照)。
off-line mode
6103 本体設定運用
無人搬送車本体にある操作盤に人が直接搬送指示を入力する運
用。
main unit setting
mode
6104 運行可能台数
無人搬送車システムとして運行又は制御できる無人搬送車の最
大台数。
maximum number
of vehicles
6105 有効稼働時間
無人搬送車が運転モードで使用されるときの指示待機時間及び
指示待機する場所への走行中以外の時間。
effective operation
hours
6106 総稼働時間
無人搬送車が運転モードで使用される総時間。
total operation
hours
6107 稼働率
有効稼働時間を総稼働時間で除した値。
utilization
6108 指示待機時間
自動運転中に実行すべき指示がなく停止している時間。
waiting time for
order
6109 干渉時間
無人搬送車相互が合流点,移載点などで干渉のために待ちにな
る時間。
block time
6110 能力シミュレーショ
ン
無人搬送車システムをモデルを用いて模擬的に再現し実対象の
搬送能力を推定すること。
simulation
6111 サイクルタイム
無人搬送車がそのシステムにおいて定義された一工程に要する
時間。
cycle time
6112 搬送パターン
荷積みステーションと荷卸しステーションとの組合せ又は搬送
経路を含む組合せ。
working cycle
6113 搬送処理量
無人搬送車1台が所定時間内に搬送する量。
total number of
transports per
time unit
6114 搬送単位
無人搬送車が一度に搬送する荷の数量。
unit of transfer
6115 搬送能力
無人搬送車システムが所与のレイアウトにおいて1時間当たり
に搬送できる搬送回数。
transport capacity
6116 必要搬送量,
要求搬送量
無人搬送車システムの目標とする搬送数量。
necessity of
transport
6117 FROM−TO(情報)
無人搬送車又は荷の搬送元と搬送先(との位置情報)。
from-to
information
6118 搬送要求
無人搬送車システム又は無人搬送車に対し搬送の開始を求める
こと。
ordering
6119 行先指示
無人搬送車又は荷の搬送先を入力すること。
destination order
6120 作業指示
無人搬送車に対する移載,バッテリ交換,充電などの作業の指
示を入力すること。
operation order
11
D 6801:2019
2) データ設定
番号
用語
定義
対応英語(参考)
6201 車上設定
車上制御装置によって動作(作業)指令を設定すること。
onboard data input
6202 地上設定
地上制御装置又はそれに接続された設定器によって動作指令又
は作業指令を設定すること。
remote data input
6203 単一設定
単一の動作指令又は作業指令だけを設定すること。
single data input
6204 複数設定
複数の動作指令又は作業指令を同時に設定すること。
multi data input
3) 運行・制御
番号
用語
定義
対応英語(参考)
6301 呼出し制御,
呼込み制御
待機している無人搬送車を搬送要求の発生したステーションに
呼び出す(呼び込む)制御。
call in control
6302 ブロッキング制御
一つのブロックに2台以上入らないようにして衝突防止を行う
制御。
blocking zone
control
6303 トラッキング制御
地上制御装置が無人搬送車の位置をトラッキングすることによ
って衝突防止及び運行制御を行う制御。
tracking control
6304 マップ,
地図
走行路のレイアウト。
route map
6305 号車管理
無人搬送車に号車番号を割り付け,号車番号を意識しながらそ
の運行を制御すること。
control by vehicle
number
6306 配車管理,
配車制御
それぞれの搬送作業に対して,その緊急度,無人搬送車の現在
位置,状態などから着手する搬送の順番決定及び個々の搬送に
従事させる無人搬送車の割り付けを行うこと。
dispatch control
6307 交通管制
合流点,単線往復路などで無人搬送車相互の干渉及びデッドロ
ックの発生を防ぐために特定エリアへの無人搬送車の進入を制
御すること。
traffic control
6308 合流(点)制御
走行経路上の合流点における無人搬送車の衝突防止のための制
御。
crossing control
6309 待ち合わせ制御
無人搬送車相互又は無人搬送車と地上固定設備との衝突防止の
ための制御。
blocking control
6310 追い出し制御
行先指示をもつ無人搬送車が後続したとき,行先指示のない無
人搬送車を待避点,待機点又はホームステーションへ回送させ
る制御。
push out control
6311 経路閉鎖制御,
ルート閉鎖制御
経路に障害があるとき,その経路への進入を一時的に停止又は
他の経路へう(迂)回させる制御。
closing
6312 進入待機
進入許可が得られるまで一時停止すること。
waiting
6313 デッドロック
ある一定の狭い範囲に無人搬送車が集中することによって身動
きできなくなること。
dead lock
condition
4) レイアウト
番号
用語
定義
対応英語(参考)
6401 分岐
誘導路が2本以上に分岐していること。
diverge
6402 合流
誘導路が2本以上合流していること。
merge
6403 走行領域
無人搬送車及びそれにけん引される台車が誘導状態で走行する
領域。
travel area
6404 運転領域
無人搬送車の走行領域及びその荷の移載場所を合わせた領域。 operation area
6405 安全領域
無人搬送車の走行通過時及び移載時に人が待避することができ
る領域。
safety area
6406 軌跡図
走行領域の全部又は一部において無人搬送車の平面軌跡を表示
した図。
locus chart
6407 待機点
即時運転の状態に入ることが可能な状態で停止している箇所。 waiting point
12
D 6801:2019
番号
用語
定義
対応英語(参考)
6408 停止点
無人搬送車が正常に停止することのできるポイント。
stop point
6409 交さ(叉),
交差
無人搬送車相互又は他の移動物と無人搬送車との誘導路が交わ
ること。
crossing
6410 運行経路
搬送指示を受けたポイントから荷積みステーション,荷卸しス
テーションを経て次の指示を受けるための待機場所に至るまで
の一連の経路。
operating route
6411 搬送経路,
搬送ルート
荷をあるステーションからあるステーションまで搬送する経
路。
travelling route
6412 ステーション
移載などを行う停止点。
station
6413 ホームステーション,
ホームポジション
無人搬送車の待機原点又は運行経路の始点となるステーショ
ン。
home station,
home position
6414 スイッチバック
無人搬送車が,進行方向をそれまでと反対方向に切り換えて走
行すること。切り換えのポイントをスイッチバック点という。
switch-back
6415 専用通路
無人搬送車が走行するための,人と共用しない専用の通路。
exclusive path
6416 待避点,
待避ステーション
無人搬送車相互が衝突を避けるために待つ場所。
shunting point,
shunting station
6417 アドレス,
番地
走行路上の位置を識別するために走行路上の点に付けられた番
号。
address
6418 経路
あるポイントから他のあるポイントに至る無人搬送車が走行す
る道。
route
6419 立上げ点
無人搬送車システムの運行開始点。
initial point
h) 無人搬送車システムの安全性
1) 安全装置
番号
用語
定義
対応英語(参考)
7101 インターロック機構
特定の条件(一般的にはガードが閉じていない場合)の下で機
械要素の運転を防ぐことを目的とした機械装置,電気装置,又
はその他の装置。
無人搬送車システムにおいては,車上と地上との間での移載時,
無人搬送車が特定エリアに進入する際のオートドアの開閉時な
どの,安全保証のために使用する。
interlocking device
7102 オートドア制御装置
無人搬送車を通過させるために,適切なタイミングでオートド
アを開閉する制御装置(図12参照)。
autodoor control
device
7103 衝突防止装置
無人搬送車相互の衝突を防止するために車上又は地上に設けら
れる装置。
collision avoidance
controller
7104 自動運転表示灯
無人搬送車が自動運転中に動作していることを示す表示灯。
status indicator
2) 表示・警報・その他
番号
用語
定義
対応英語(参考)
7201 安全標識
人の安全を確保するための標識。
safety sign
7202 警報
音,光,音声,文字,図などで無人搬送車システムの状態を知
らせること。
warning
7203 指名作業者
無人搬送車並びにシステムの取扱い及び保守について教育を受
け,事業所から指名された作業者。
authorized person
7204 退避場所
無人搬送車,けん引された車両などが通過する空間と壁,設備,
積荷などとの隙間。無人搬送車が接近してきたときに人が退避
するための空間。
escape space
7205 安全確認形システム
人の安全が確認されているときだけ,機械装置又はシステムの
運転開始若しくは継続を許可する機能をもつシステム。
safety
acknowledge
type system
13
D 6801:2019
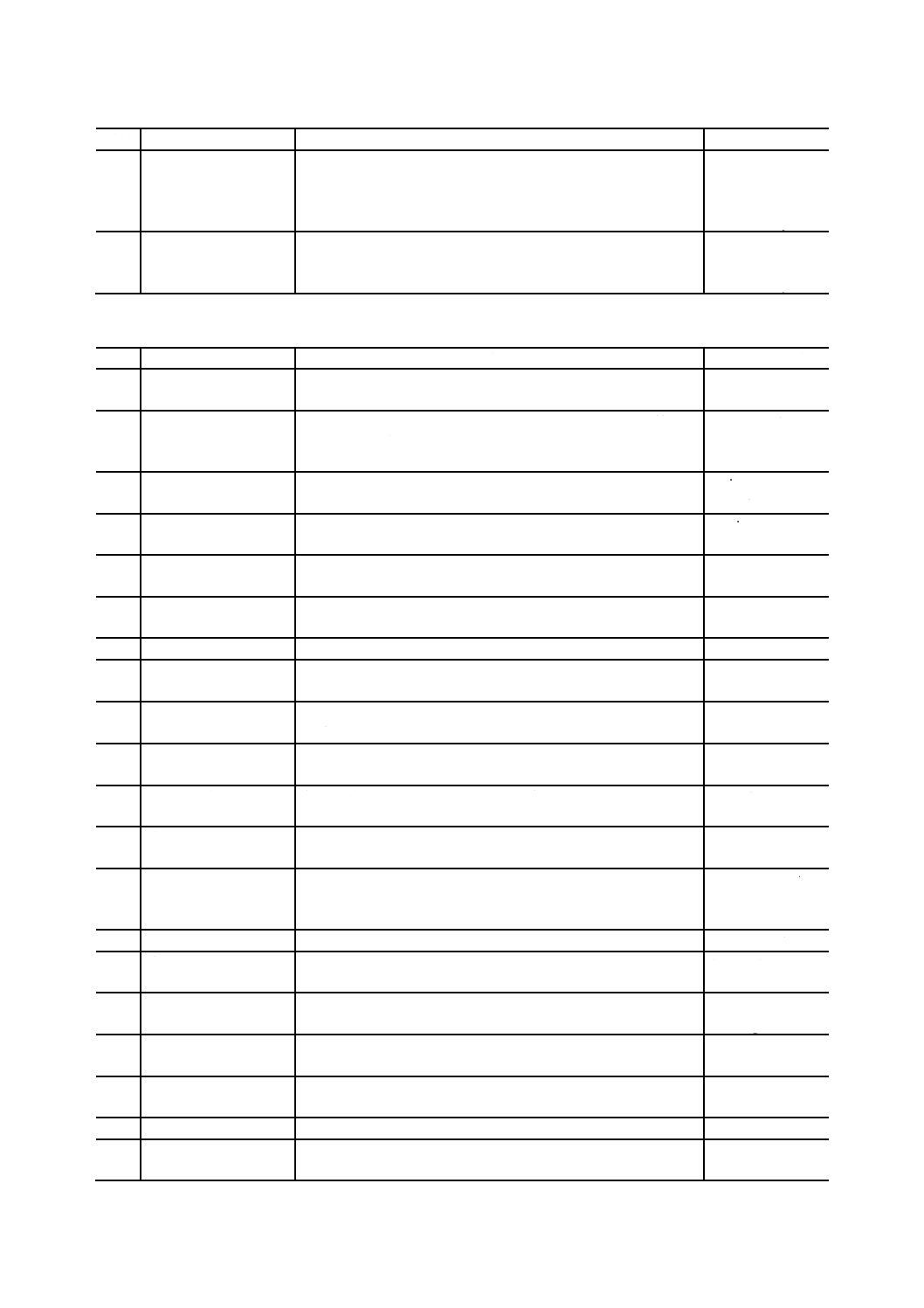
a) コンベヤ付
b) リフタ付
図1−積載形の例
a) 列車けん引
b) 潜り込みけん引
図2−けん引形の例
図3−フォークリフト形の例
14
D 6801:2019
図4−人手移載式の例
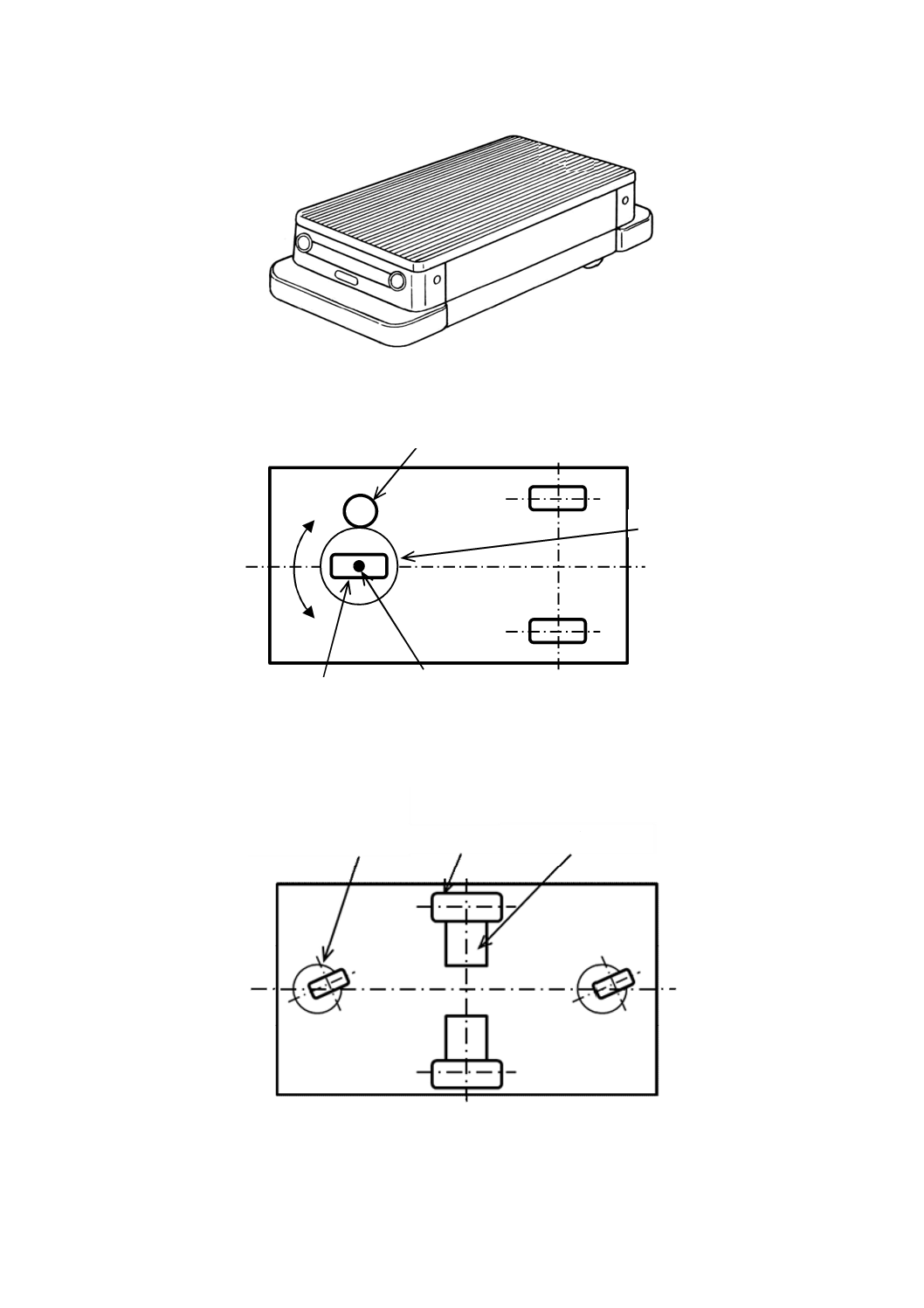
図5−操だ輪方式の例
図6−二輪速度差方式の例
従動輪
(旋回あり)
駆動輪
ドライブモータ
ステアリングモータ
回転軸
駆動輪
旋回座
ステアリングモータ
旋回座
回転軸
駆動輪
15
D 6801:2019
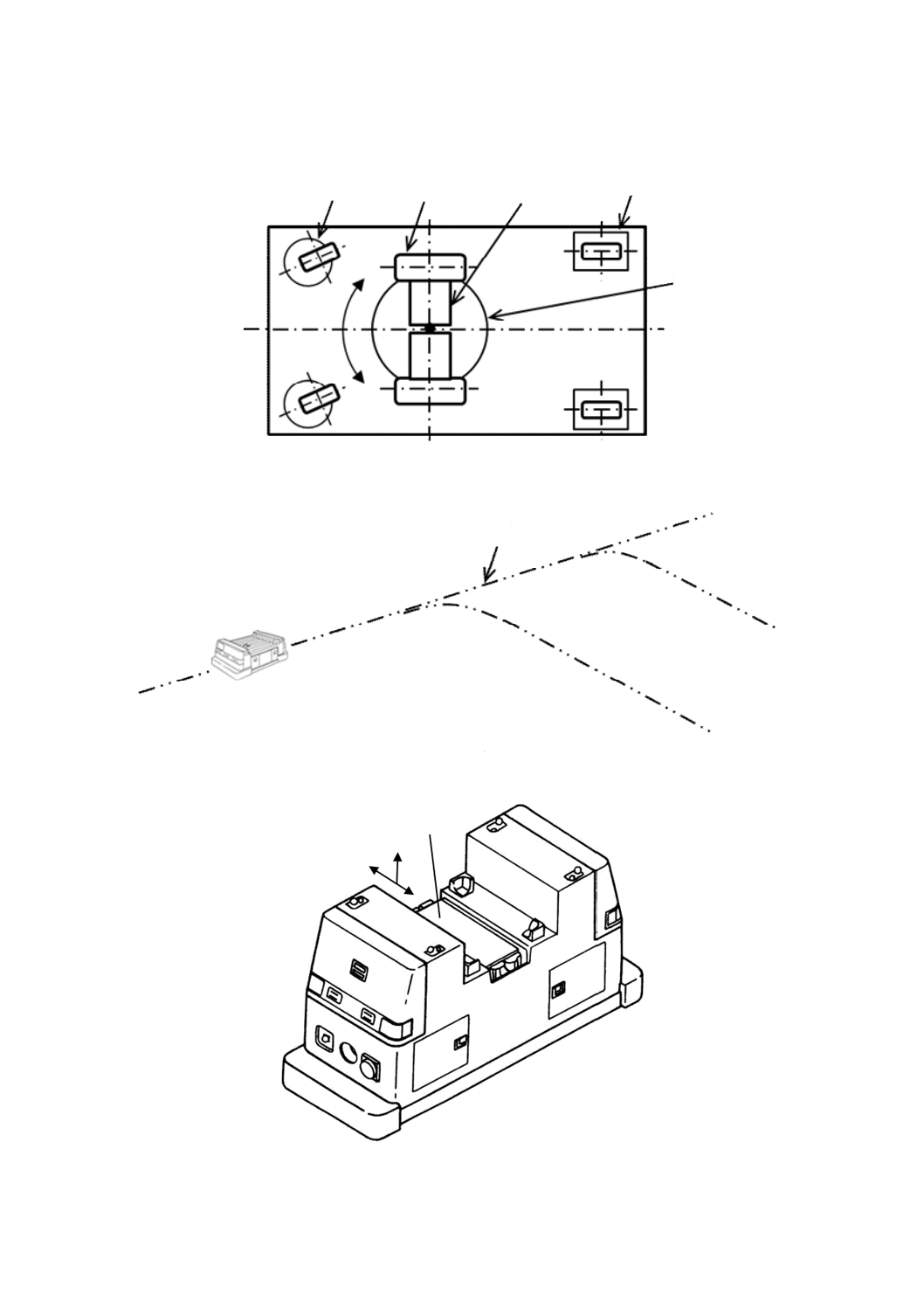
図7−二輪速度差操だ輪方式の例
図8−誘導路の例
図9−スライドフォークの例
スライド・昇降機構
誘導路
従動輪
(旋回あり)
従動輪
(旋回なし)
駆動輪
ドライブモータ
旋回座
16
D 6801:2019
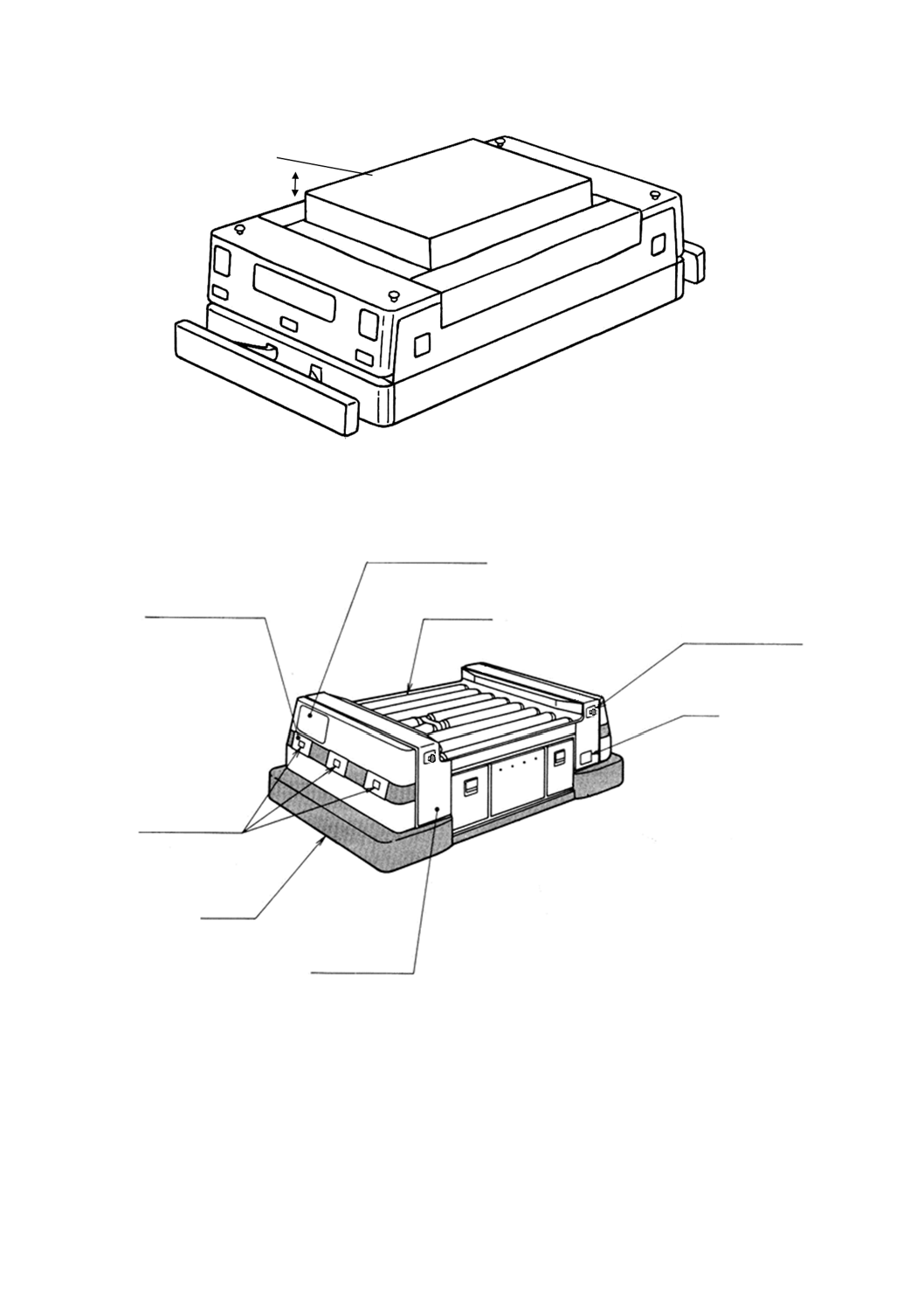
図10−リフタの例
図11−無人搬送車の外観例
進行方向表示灯
車上操作パネル
障害物センサ
移載装置
非常停止ボタン
銘板
バンパ
車上制御装置
昇降機構
17
D 6801:2019
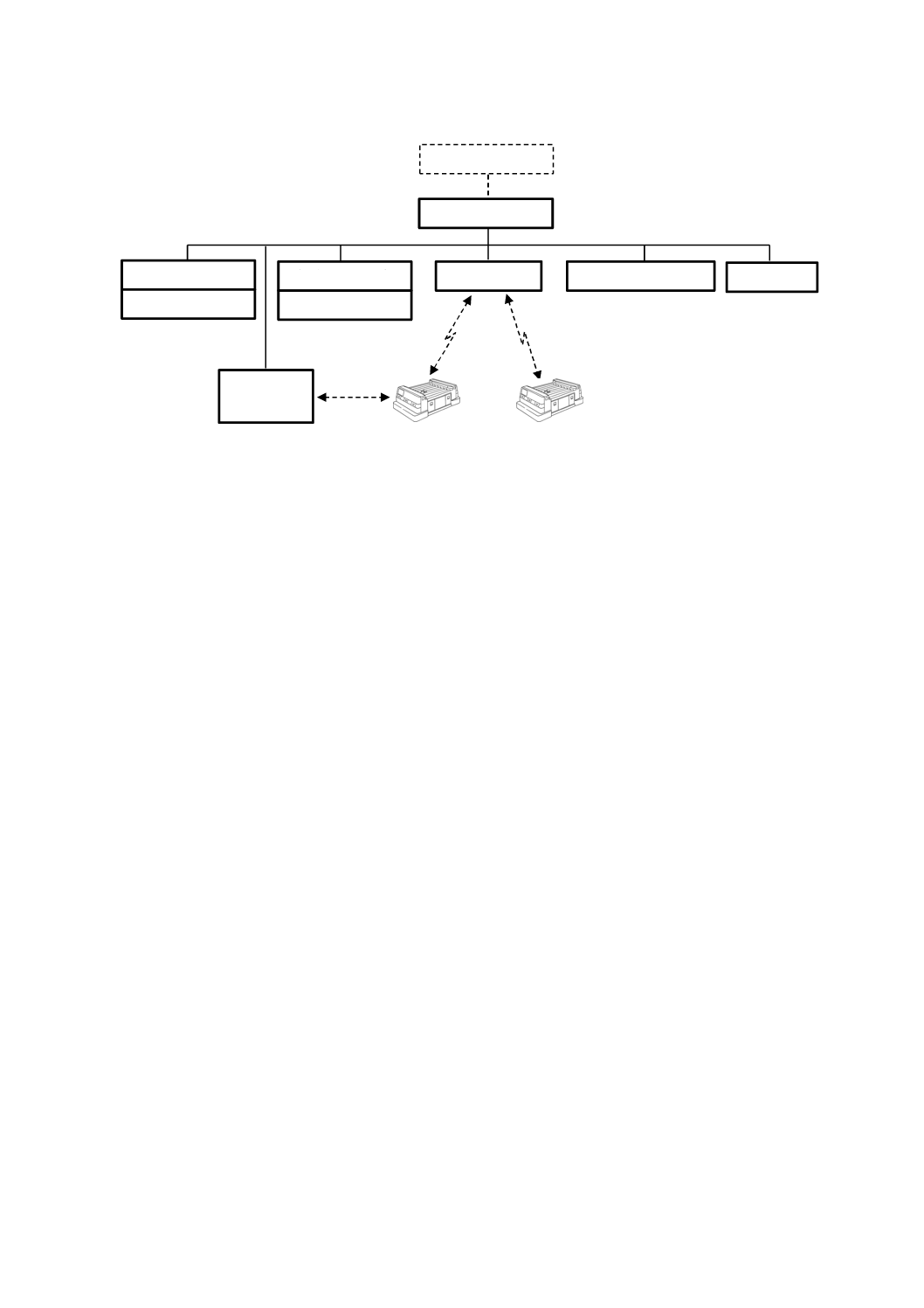
図12−無人搬送車システムの構成例
無線装置
搬送要求操作盤
行先設定操作盤
地上制御装置
オートドア制御装置
充電装置
地上側
移載装置
移載信号
上位システム
搬送要求操作盤
行先設定操作盤