D 6202:2011
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 仕様書の項目 ··················································································································· 1
附属書A(規定)仕様書項目の測定及び記入方法 ······································································· 8
D 6202:2011
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本産業
車両協会(JIVA)及び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正す
べきとの申出があり,日本工業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が改正した日本
工業規格である。これによって,JIS D 6202:1995は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 6202:2011
フォークリフトトラック−仕様書様式
Fork lift trucks-Standard form of specifications
序文
この規格は,1976年に制定され,その後2回の改正を経て今日に至っている。前回の改正は1995年に
行われたが,その後,引用規格,参照規格の改正などがあり,これらに対応するために改正した。
なお,対応国際規格は現時点で制定されていない。
1
適用範囲
この規格は,カウンタバランスフォークリフトトラック及びリーチフォークリフトトラックの仕様書に
記載する主要な項目及び記入要領について規定する。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,記載の年の版を適用し,その後の改正版(追補を含む。)は適用しない。
JIS D 6201:1999 フォークリフトトラック−用語
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS D 6201による。
4
仕様書の項目
仕様書の項目は,次による。
なお,仕様書項目の測定及び記入方法を,附属書Aに示す。
a) カウンタバランスフォークリフトトラックのエンジン式は表1に,バッテリ式は表2による。また,
リーチフォークリフトトラック(バッテリ式)は,表3による。
b) 仕様書の項目は,フォークリフトトラックの諸元及び性能の概略を示すもので,仕様書としては,必
要に応じて全体図などの図面を添付する。
2
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−カウンタバランスフォークリフトトラック(エンジン式)仕様書項目
区分
番号
項目
摘要
記号
単位
参考
型式
1.1
製造業者
1.2
車両型式
1.3
定格荷重
kg
1.4
基準荷重中心
mm
1.5
エンジンの種類
ガソリン/ディーゼル/
LPG
寸法
2.1
標準揚高
h3
mm
2.2
フリーリフト
h2
mm
2.3
マスト傾斜角
前/後
α / β
deg
2.4
フィンガバー形状
JIS D 6024による。
2.5
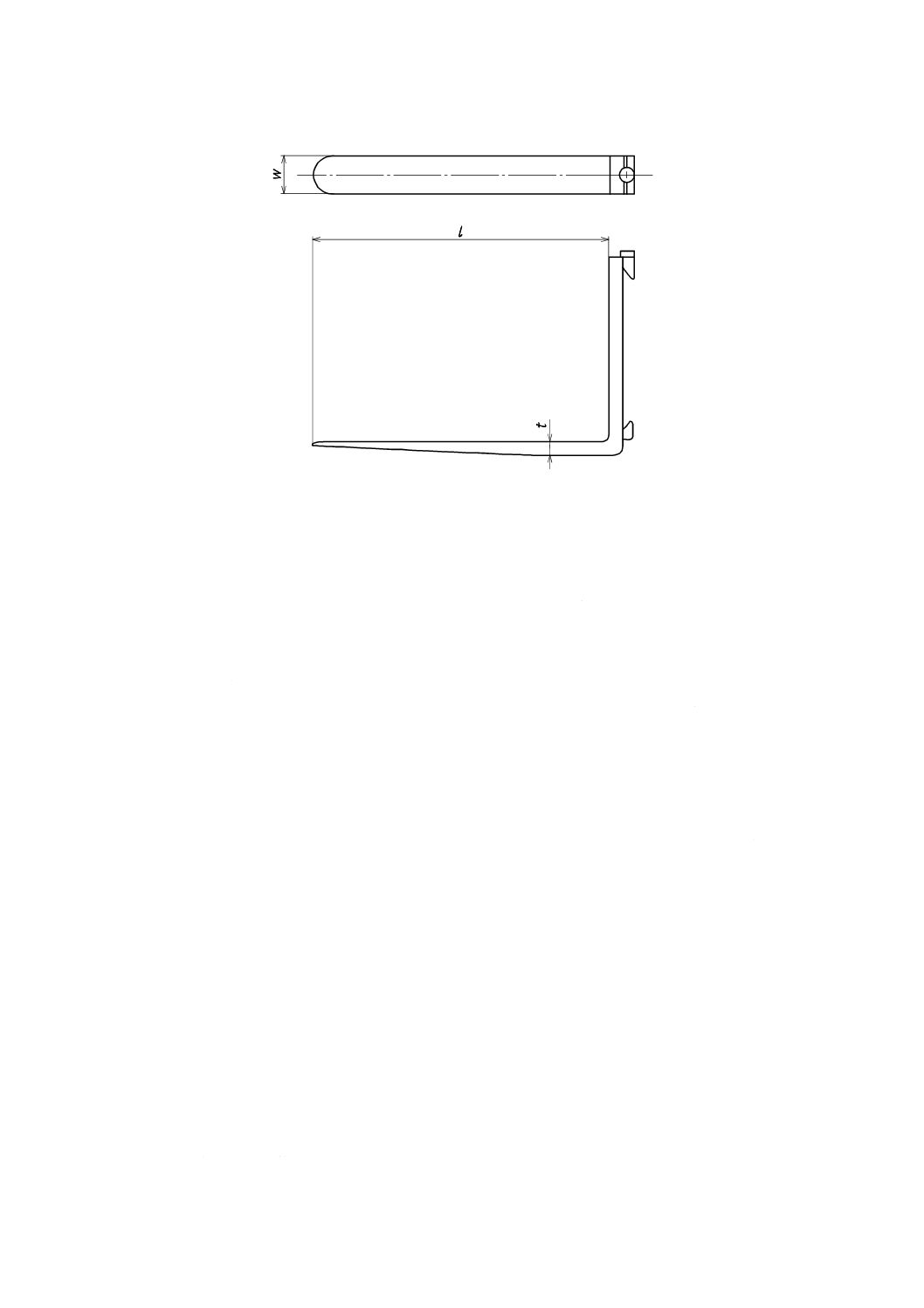
フォーク形状
長さ/幅/厚さ
l/w/t
mm
2.6
フォーク調整間隔
最大/最小
B3/B4
mm
2.7
全長
フォーク先端まで
L1
mm
2.8
車体長さ
フォーク垂直前面まで
L2
mm
2.9
全幅
B
mm
2.10
マスト高さ
h1
mm
2.11
最大揚高時高さ
h4
mm
2.12
ヘッドガード高さ
h5
mm
2.13
フロントオーバハ
ング
F
mm
2.14
最小旋回半径
R
mm
JIS D 6001による。
2.15
実用直角通路幅
1 100×1 100パレット
mm
2.16
実用直角積付通路
幅
1 100×1 100パレット
As
mm
性能
3.1
走行速度
前進(負荷/無負荷)
km/h
3.2
後進(負荷/無負荷)
km/h
3.3
上昇速度
負荷/無負荷
mm/s
3.4
下降速度
負荷/無負荷
mm/s
3.5
最大けん引力
連続3分,1.5 km/h以上
N
異なる場合は条件
を表示する。
3.6
最大登坂能力
連続3分,1.5 km/h以上
%
異なる場合は条件
を表示する。
質量
4.1
車両質量
kg
運転時質量
4.2
軸荷重
負荷(前/後)
kg
4.3
無負荷(前/後)
kg
走行
装置
5.1
車輪数
前輪/後輪(X=駆動輪)
5.2
タイヤの呼び/種類 前輪
5.3
後輪
5.4
軸距
L3
mm
5.5
輪距
前輪
mm
5.6
後輪
mm
5.7
地上高
最低
m1
mm
5.8
軸距中央
m2
mm
5.9
主ブレーキ
機械/油圧/電気/空気
5.10
駐車ブレーキ
足踏/手動/デッドマン
3
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−カウンタバランスフォークリフトトラック(エンジン式)仕様書項目(続き)
区分
番号
項目
摘要
記号
単位
参考
駆動
装置
6.1
内燃機関
製造業者/型式
6.2
定格出力
kW/rpm
6.3
最大トルク
Nm/rpm
6.4
総排気量
L
6.5
燃料タンク容量
L
6.6
燃料消費量
L/h
6.7
変速機
形式/変速段数
6.8
クラッチ
形式
その
他
7.1
荷役用油圧回路セ
ット圧
アタッチメント用
MPa
4
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−カウンタバランスフォークリフトトラック(バッテリ式)仕様書項目
区分
番号
項目
摘要
記号
単位
参考
型式
1.1
製造業者
1.2
車両型式
1.3
定格荷重
kg
1.4
基準荷重中心
mm
1.5
電動機の種類
直流/交流,開放型/密閉
型
寸法
2.1
標準揚高
h3
mm
2.2
フリーリフト
h2
mm
2.3
マスト傾斜角
前/後
α / β
deg
2.4
フィンガバー形状
JIS D 6024による。
2.5
フォーク形状
長さ/幅/厚さ
l/w/t
mm
2.6
フォーク調整間隔
最大/最小
B3/B4
mm
2.7
全長
フォーク先端まで
L1
mm
2.8
車体長さ
フォーク垂直前面まで
L2
mm
2.9
全幅
B
mm
2.10
マスト高さ
h1
mm
2.11
最大揚高時高さ
h4
mm
2.12
ヘッドガード高さ
h5
mm
2.13
フロントオーバハ
ング
F
mm
2.14
最小旋回半径
R
mm
JIS D 6001による。
2.15
実用直角通路幅
1 100×1 100パレット
mm
2.16
実用直角積付通路
幅
1 100×1 100パレット
As
mm
性能
3.1
走行速度
前進(負荷/無負荷)
km/h
3.2
後進(負荷/無負荷)
km/h
3.3
上昇速度
負荷/無負荷
mm/s
3.4
下降速度
負荷/無負荷
mm/s
3.5
最大けん引力
連続3分,1.5 km/h以上
N
異なる場合は条件
を表示する。
3.6
最大登坂能力
連続3分,1.5 km/h以上
%
異なる場合は条件
を表示する。
質量
4.1
車両質量
標準バッテリを含む
kg
運転時質量
4.2
軸荷重
負荷(前/後)
kg
4.3
無負荷(前/後)
kg
走行
装置
5.1
車輪数
前輪/後輪(X=駆動輪)
5.2
タイヤの呼び/種類 前輪
5.3
後輪
5.4
軸距
L3
mm
5.5
輪距
前輪
mm
5.6
後輪
mm
5.7
地上高
最低
m1
mm
5.8
軸距中央
m2
mm
5.9
主ブレーキ
機械/油圧/電気/空気
5.10
駐車ブレーキ
足踏/手動/デッドマン
5
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−カウンタバランスフォークリフトトラック(バッテリ式)仕様書項目(続き)
区分
番号
項目
摘要
記号
単位
参考
駆動
装置
6.1
バッテリ
形式
6.2
電圧/5時間率容量
V/Ah
6.3
質量(ケース付)
kg
6.4
一充電当たり稼働時間
h
6.5
走行用モータ
出力(60分定格)
kW
短時間定格
6.6
コントロール方式
6.7
荷役用モータ
出力(5分定格)
kW
短時間定格,又は
定格の種類表示
6.8
コントロール方式
6.9
パワーステアリン
グ用モータ
出力(60分定格)
kW
短時間定格
6.10
コントロール方式
6.11
充電器
形式(搭載形/別置形)
6.12
充電方式
6.13
入力(相数/電圧)
/V
6.14
トランス容量
kVA
その
他
7.1
荷役用油圧回路セ
ット圧
アタッチメント用
MPa
6
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3−リーチフォークリフトトラック(バッテリ式)仕様書項目
区分
番号
項目
摘要
記号
単位
参考
型式
1.1
製造業者
1.2
車両型式
1.3
定格荷重
kg
1.4
基準荷重中心
mm
1.5
電動機の種類
直流/交流,開放型/密閉
型
1.6
運転方式
立ち席/座り席
寸法
2.1
標準揚高
h3
mm
2.2
フリーリフト
h2
mm
2.3
フォーク傾斜角
上方/下方
β / α
deg
2.4
フィンガバー形状
JIS D 6024による。
2.5
フォーク形状
長さ/幅/厚さ
l/w/t
mm
2.6
フォーク調整間隔
最大/最小
B3/B4
mm
2.7
全長
フォーク先端まで
L1
mm
2.8
アウトリガ先端まで
L
mm
2.9
車体長さ
フォーク垂直前面まで
L2
mm
2.10
リーチ量
X1
mm
2.11
全幅
B
mm
2.12
アウトリガ内寸法
B1
mm
2.13
フレーム幅
B2
mm
2.14
アウトリガ高さ
h6
mm
2.15
マスト高さ
h1
mm
2.16
最大揚高時高さ
h4
mm
2.17
ヘッドガード高さ
h5
mm
2.18
フロントオーバハ
ング
X
mm
2.19
最小旋回半径
R
mm
JIS D 6001による。
2.20
実用直角通路幅
1 100×1 100パレット
mm
2.21
実用直角積付通路
幅
1 100×1 100パレット
As
mm
性能
3.1
走行速度
負荷/無負荷
km/h
3.2
上昇速度
負荷/無負荷
mm/s
3.3
下降速度
負荷/無負荷
mm/s
3.4
リーチ速度
負荷/無負荷
mm/s
3.5
最大登坂能力
連続3分,1.5 km/h以上
%
異なる場合は条件
を表示する。
質量
4.1
車両質量
標準バッテリを含む
kg
運転時質量
4.2
軸荷重
リーチ繰
入
負荷(荷重輪/駆動輪)
kg
4.3
無負荷(荷重輪/駆動輪)
kg
4.4
リーチ繰
出
負荷(荷重輪/駆動輪)
kg
4.5
無負荷(荷重輪/駆動輪)
kg
7
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3−リーチフォークリフトトラック(バッテリ式)仕様書項目(続き)
区分
番号
項目
摘要
記号
単位
参考
走行
装置
5.1
車輪数
荷重輪/駆動輪/遊輪
5.2
タイヤの呼び/種類
荷重輪
5.3
駆動輪
5.4
遊輪
5.5
軸距
L3
mm
5.6
輪距
荷重輪
mm
5.7
駆動輪
mm
5.8
最低地上高
軸距中央
m2
mm
5.9
主ブレーキ
機械/油圧/電気/空気
5.10
駐車ブレーキ
足踏/手動/デッドマン
駆動
装置
6.1
バッテリ
形式
6.2
電圧/5時間率容量
V/Ah
6.3
質量(ケース付)
kg
6.4
一充電当たり稼働時間
h
6.5
走行用モータ
出力(60分定格)
kW
短時間定格
6.6
コントロール方式
6.7
荷役用モータ
出力(5分定格)
kW
短時間定格,又は
定格の種類表示
6.8
コントロール方式
6.9
パワーステアリン
グ用モータ
出力(60分定格)
kW
短時間定格
6.10
コントロール方式
6.11
充電器
形式(搭載形/別置形)
6.12
充電方式
6.13
入力(相数/電圧)
/V
6.14
トランス容量
kVA
その
他
7.1
荷役用油圧回路セ
ット圧
アタッチメント用
MPa
8
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
仕様書項目の測定及び記入方法
A.1 仕様書項目の数値
フォークリフトトラックのタイヤ空気圧,油圧リリーフ弁セット圧力などは,製造業者の指定する標準
の状態とし,特に規定する場合を除き,無負荷時水平面上に置かれた状態で得られる値を記入する。
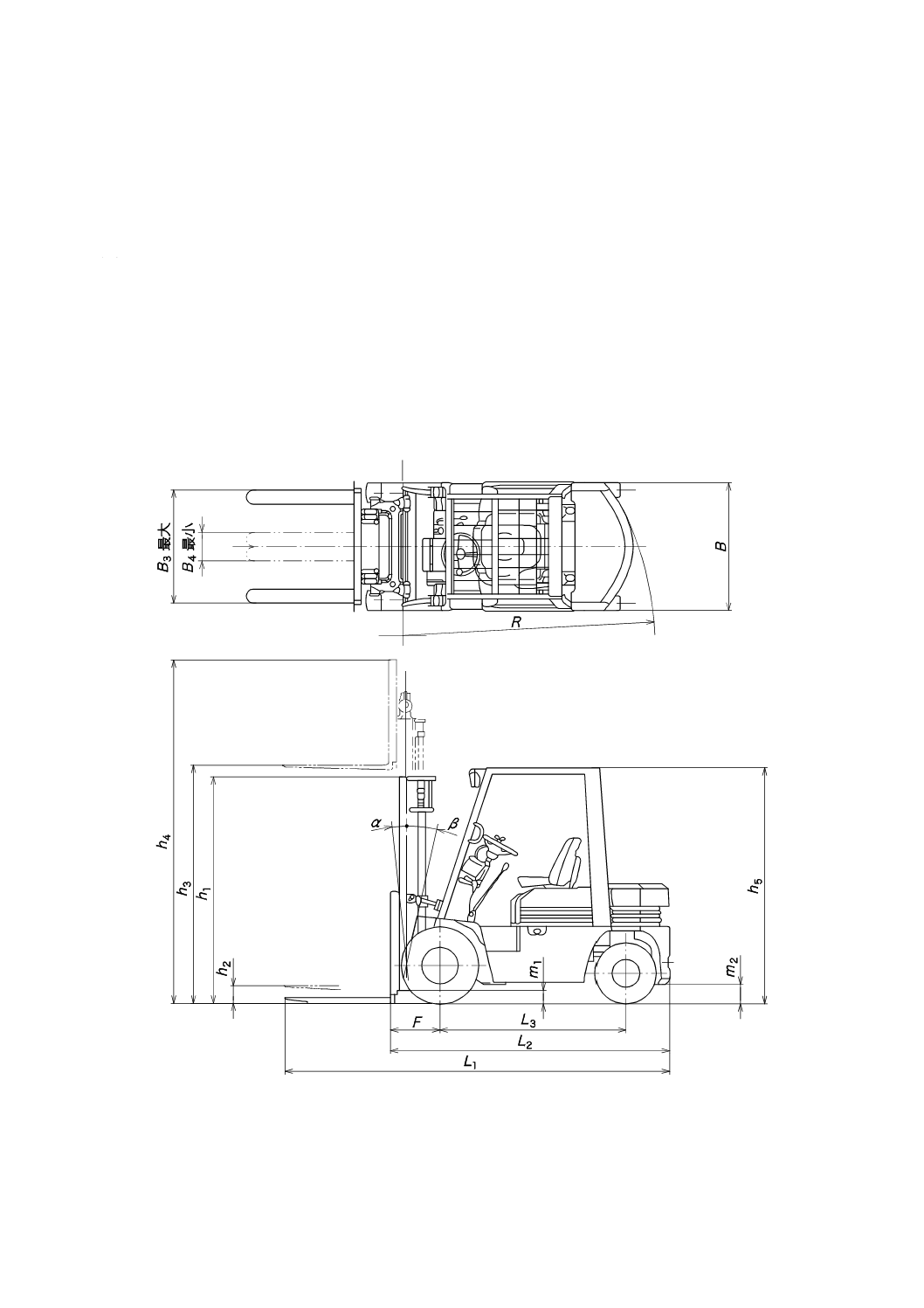
A.2 フォークリフトトラックの主要寸法記号
カウンタバランスフォークリフトトラックを図A.1に,リーチフォークリフトトラックを図A.2に示す。
また,フォークを図A.3に示す。
図A.1−カウンタバランスフォークリフトトラックの主要寸法記号
9
D 6202:2011
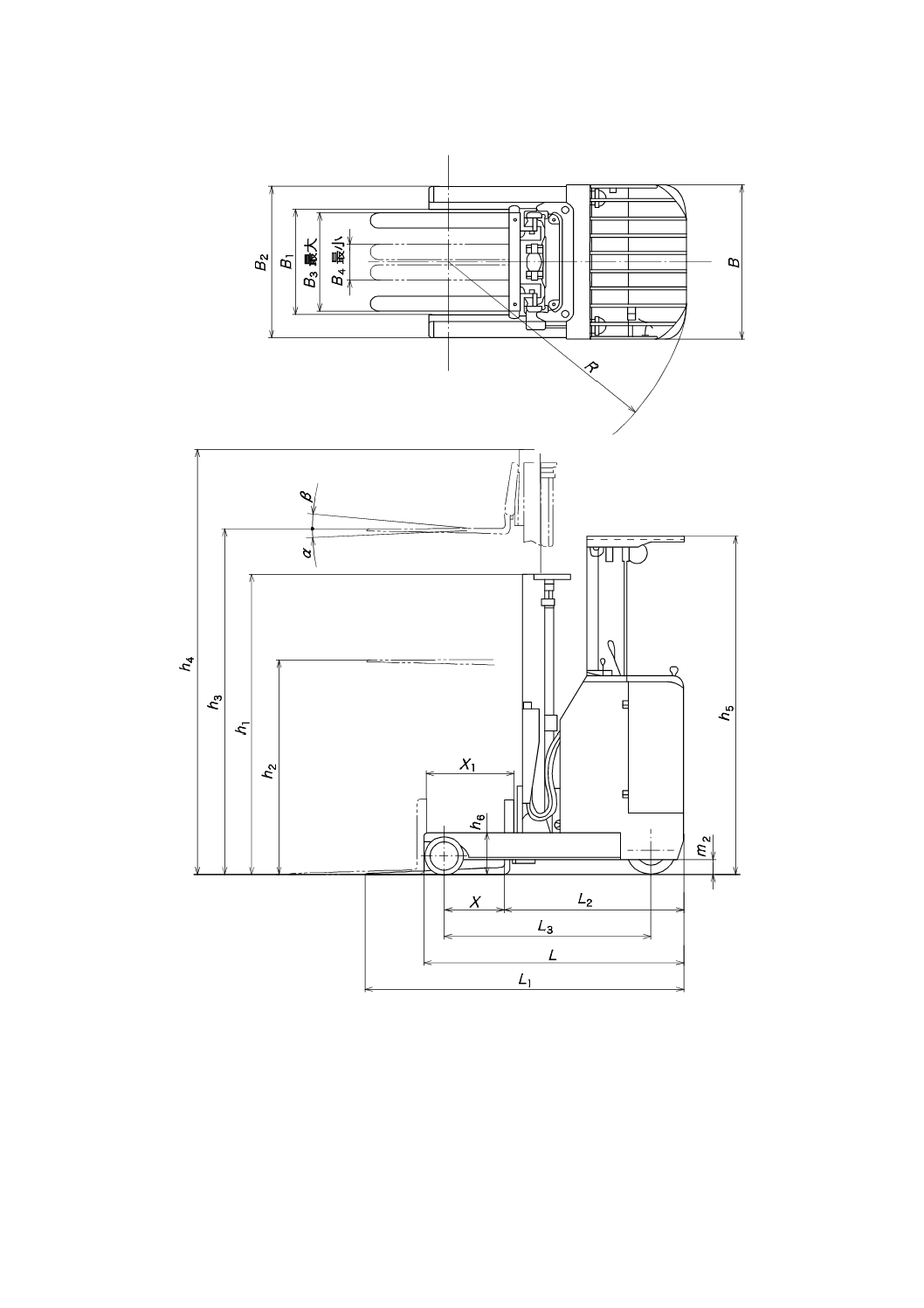
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.2−リーチフォークリフトトラックの主要寸法記号
10
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.3−フォークの寸法記号
A.3 実用直角通路幅の寸法
実用直角通路幅の寸法は,フォークリフトトラックが所要の荷を積載して旋回走行できる直角通路で実
用上の最小値を記入する。この寸法は直角通路幅の理論的最小値に,旋回余裕200 mmを加えて求める。
A.4 実用直角積付通路幅の寸法
実用直角積付通路幅は,次による。
a) 実用直角積付通路幅の寸法は,フォークリフトトラックが所要の荷を積載し,直線通路上で90°旋回
できる実用上の最小通路幅を記入する。この寸法は直角積付通路幅の理論的最小値に,負荷状態で必
要な旋回余裕を加えて求める。
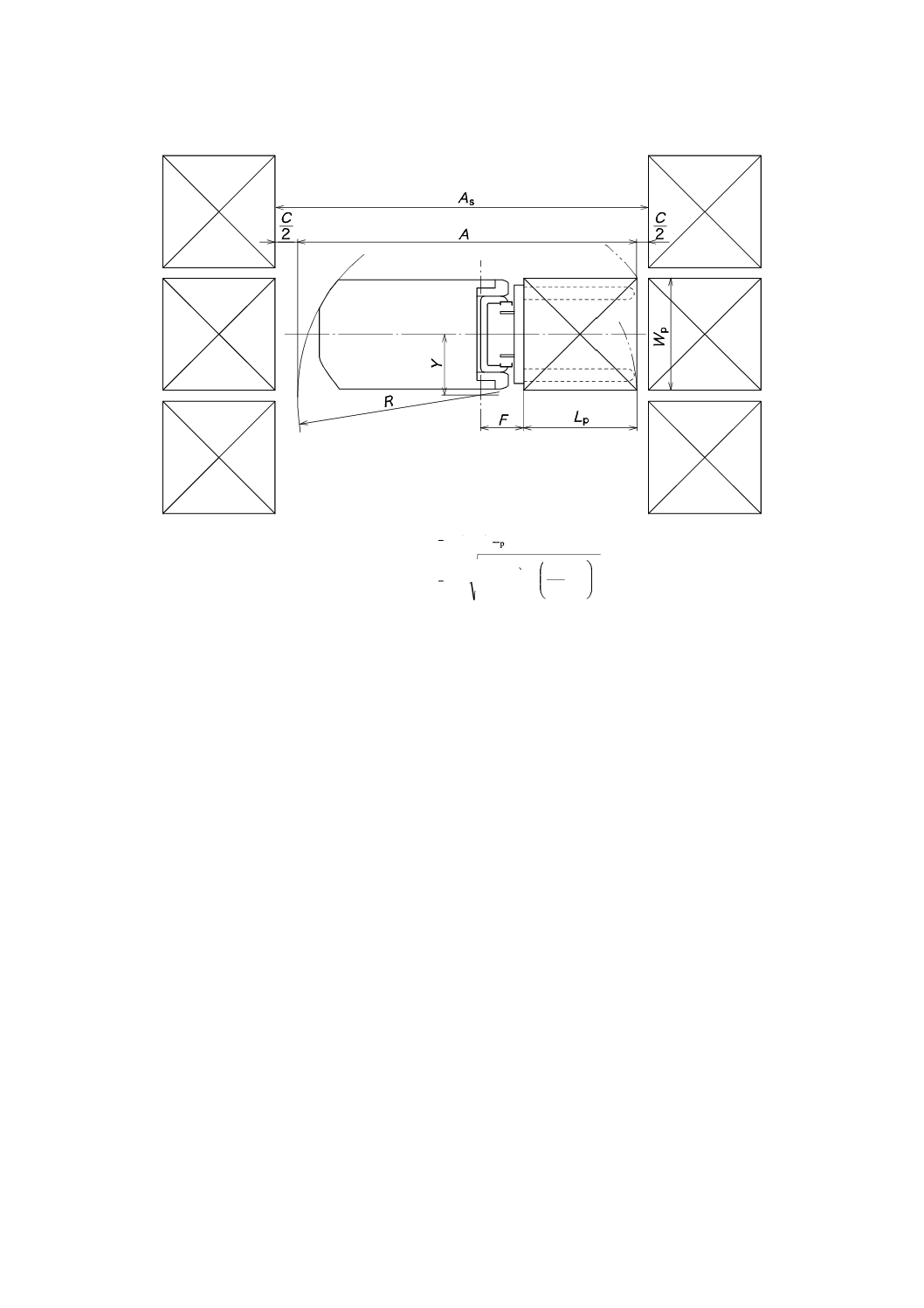
b) 直角積付通路幅の理論的最小値は,フォークリフトトラックの種類及び駆動輪・操向輪の配置によっ
て相違し,カウンタバランスフォークリフトトラックの4輪車及び前輪が正逆転しない3輪車は図A.4,
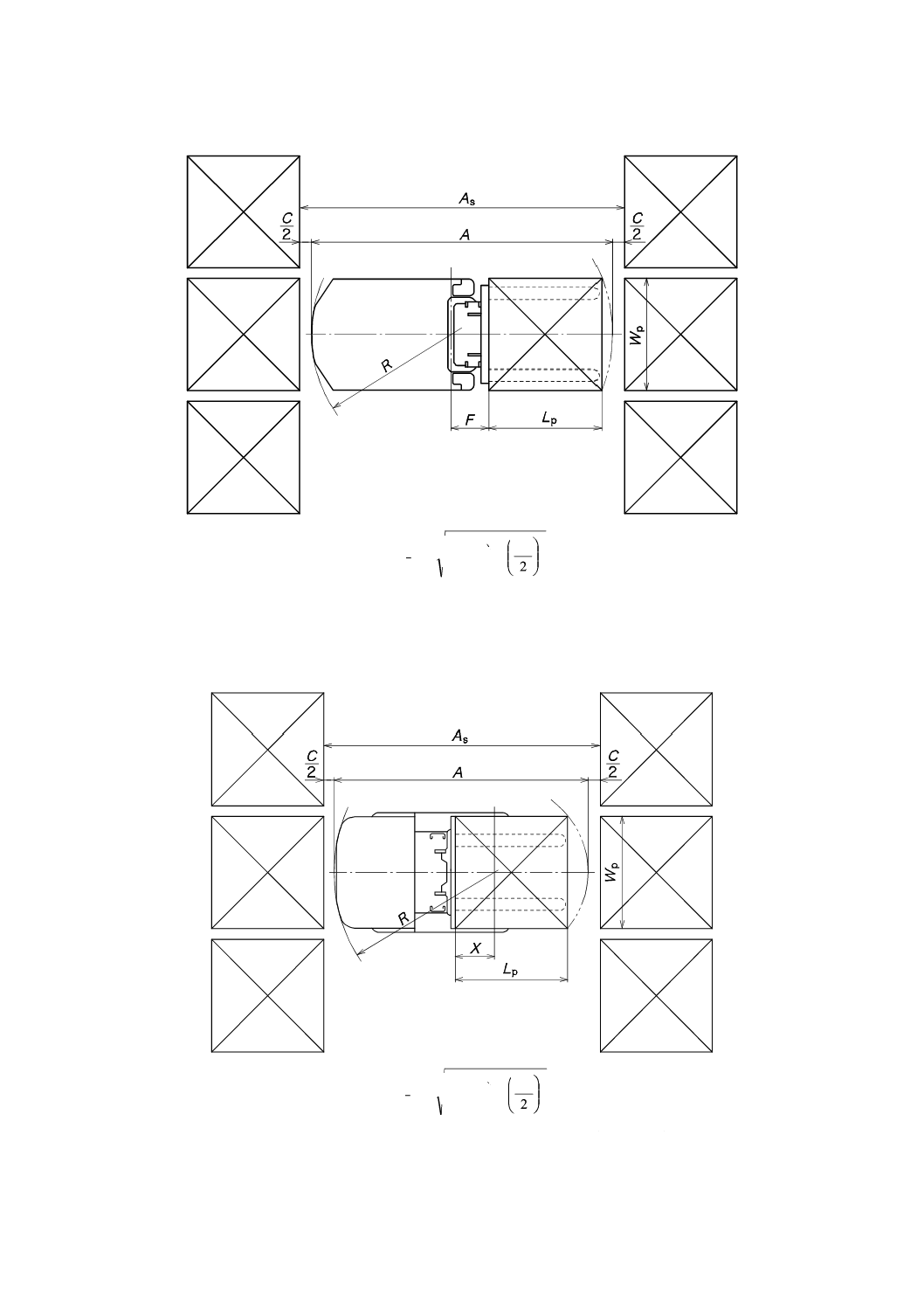
前輪が正逆転する3輪車は図A.5に,また,リーチフォークリフトトラックは図A.6に計算式ととも
に示す。
なお,計算式に使われる記号は,次による。
As :実用直角積付通路幅 As=A+C
A :直角積付通路幅(理論的最小値)
C :旋回余裕
Wp :荷の幅
Lp :荷の長さ
R :最小旋回半径
F :カウンタバランスフォークリフトトラックの場合,フロントオーバハング
X :リーチフォークリフトトラックの場合,リーチ繰入時のフロントオーバハング(前車軸中心
からリーチ繰入時のフォーク垂直前面までの距離)
Y :車体中心から旋回中心までの距離
11
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 2Y≧Wp
pL
F
R
A
+
+
=
b) 2Y<Wp
(
)
2
p
2
p
2
−
+
+
+
=
Y
W
F
L
R
A
図A.4−カウンタバランスフォークリフトトラックの4輪車及び3輪車
(前輪が正逆転しない場合)における直角積付通路幅
12
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(
)
2
p
2
p
2
+
+
+
=
W
F
L
R
A
図A.5−カウンタバランスフォークリフトトラックの3輪車
(前輪が正逆転する場合)における直角積付通路幅
(
)
2
p
2
p
2
+
−
+
=
W
X
L
R
A
図A.6−リーチフォークリフトトラックにおける直角積付通路幅
13
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
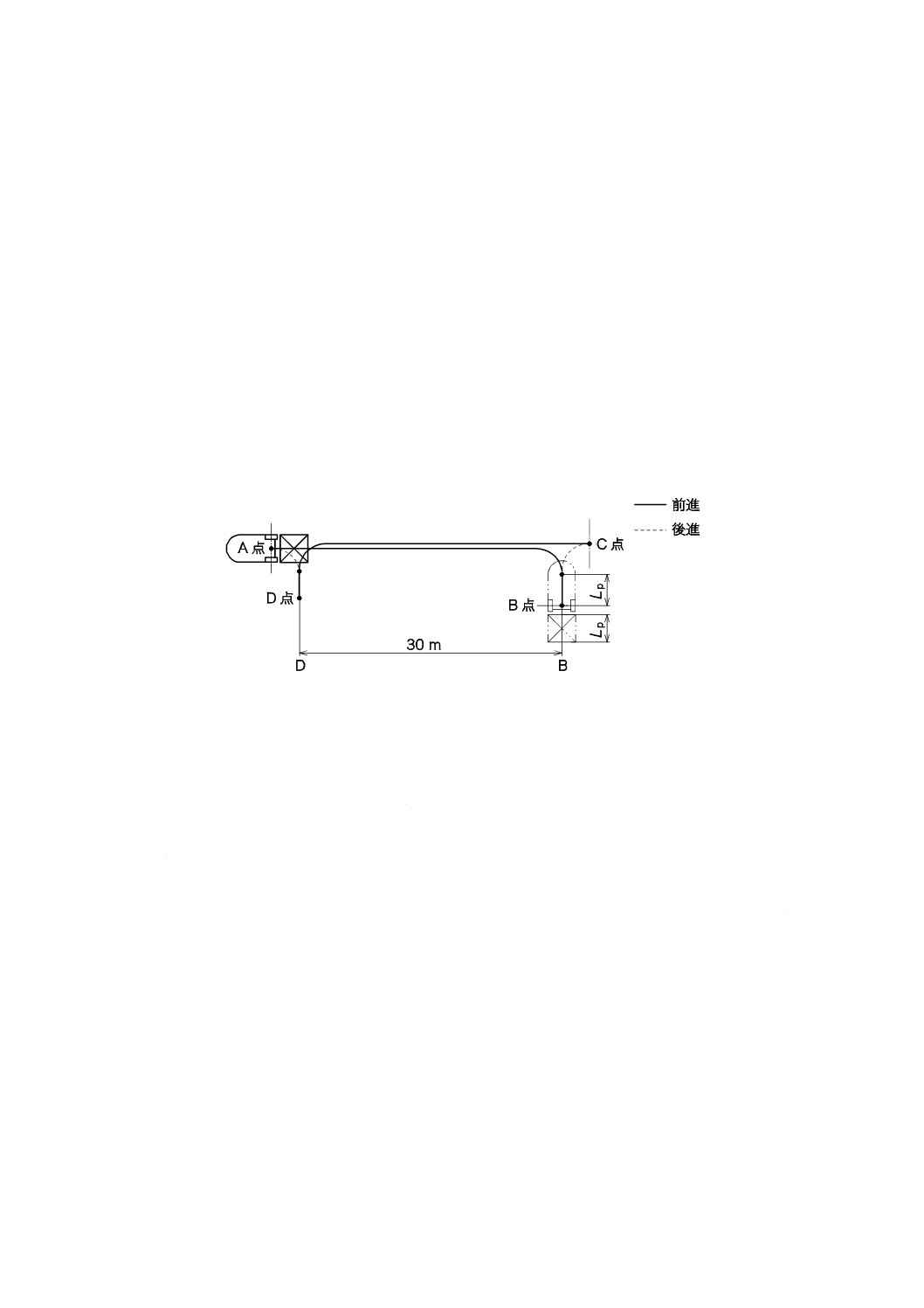
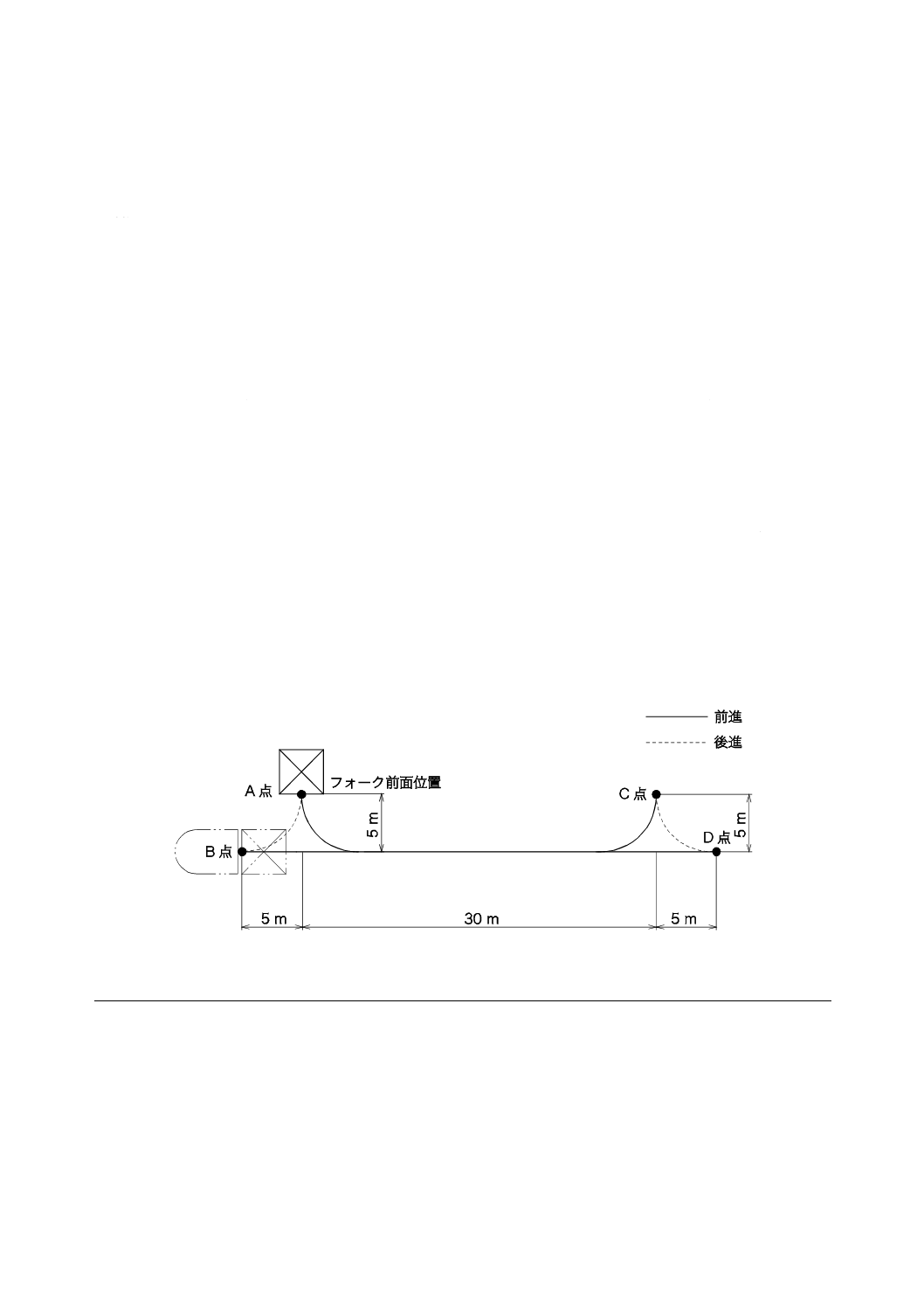
A.5 エンジン車の燃料消費量
エンジン式フォークリフトトラックの燃料消費量は,平たんで乾いた舗装路面を用い,基準負荷状態に
おいて,次のa)〜f) を1サイクルとしたものを1時間に60サイクル実施して求める(図A.7参照)。B〜
D間は30 mとし,試験は連続して行うものとする。また,試験中は荷を積んだままとする。
a) フォークリフトトラックを走行時基準負荷状態にして,A点から前進にて直進し,B点近くでB点に
向けて90°旋回する。
b) 90°旋回後,荷の長さだけ前進したB点において停止する。マストを垂直にして荷を地上2 mまで持
ち上げた後,走行時基準負荷状態に戻す。
c) 荷の長さだけ後退後,そのまま後進でC点に向け90°旋回する。
d) C点から前進にて直進し,D点近くでD点に向け90°旋回する。
e) 90°旋回後,荷の長さだけ前進したD点にて停止する。マストを垂直にして荷を地上2 mまで持ち上
げた後,走行時基準負荷状態に戻す。
f)
荷の長さだけ後退後,そのまま後進でA点に向け90°旋回する。
図A.7−燃料消費量のサイクルパターン
A.6 バッテリ車の一充電稼働時間
バッテリ式フォークリフトトラックの一充電稼働時間は,平たんで乾いた舗装路面を用い,カウンタバ
ランスフォークリフトトラックはA.6 a) のサイクルパターン1)〜10) を,リーチフォークリフトトラック
はA.6 b) のサイクルパターン1)〜10) を,3サイクル以上連続して走行したときの消費電力量,所要時間
によって求める。
a) カウンタバランスフォークリフトトラックのサイクルパターンは,次による(図A.8参照)。
1) フォークリフトトラックを走行時基準負荷状態にして,A点からB点に向け後進して,90°旋回す
る。
2) B点からC点に向け前進し,90°旋回して,ブレーキによってC点で停止する。
3) C点でフォークを2 mまで(後傾状態のまま)上昇後,走行高さまで下降させ,水平位置まで前傾
後,最後傾まで後傾させる(走行時基準負荷状態)。
4) C点からD点に向け後進して,90°旋回する。
5) D点からA点に向け前進し,90°旋回して,ブレーキによってA点で停止して荷を降ろす。
6) A点で,荷の長さだけ後退し,走行時基準無負荷状態とした後,B点に向け後進して,90°旋回す
る。
7) B点からC点に向け前進し,90°旋回して,ブレーキによってC点で停止する。
14
D 6202:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8) C点でフォークを2 mまで(後傾状態のまま)上昇後,走行高さまで下降させ,最前傾位置まで前
傾後,最後傾まで後傾させる(走行時基準無負荷状態)。
9) C点からD点に向け後進して,90°旋回する。
10) D点からA点に向け前進し,90°旋回して,ブレーキによって,A点から荷の長さ分手前で停止し,
その後,前進して荷を積み,走行時基準負荷状態とする。
b) リーチフォークリフトトラックのサイクルパターンは,次による(図A.8参照)。
1) フォークリフトトラックを走行時基準負荷状態にして,A点からB点に向け後進して,90°旋回す
る。
2) B点からC点に向け前進し,90°旋回して,ブレーキによってC点で停止する。
3) C点でリーチを押し出し,フォークを2 mまで(後傾状態のまま)上昇後,走行高さまで下降させ,
水平位置まで前傾後,最後傾まで後傾させた後,リーチを引き込む(走行時基準負荷状態)。
4) C点からD点に向け後進して,90°旋回する。
5) D点からA点に向け前進し,90°旋回して,ブレーキによってA点で停止してリーチを押し出し,
荷を降ろし,リーチを引き込む。
6) A点で,走行時基準無負荷状態とした後,B点に向け後進して,90°旋回する。
7) B点からC点に向け前進し,90°旋回して,ブレーキによってC点で停止し,リーチを押し出す。
8) C点でフォークを2 mまで(後傾状態のまま)上昇後,走行高さまで下降させ,最前傾位置まで前
傾後,最後傾まで後傾させ,リーチを引き込む(走行時基準無負荷状態)。
9) C点からD点に向け後進して,90°旋回する。
10) D点からA点に向け前進し,90°旋回して,ブレーキによってA点で停止してリーチを押し出し,
荷を積み,リーチを引き込んで走行時基準負荷状態とする。
図A.8−一充電稼働時間のサイクルパターン
参考文献 JIS C 4034-1 回転電気機械−第1部:定格及び特性
JIS D 0006-1 土工機械−機関−第1部:ネット出力試験方法
JIS D 1001 自動車用エンジン出力試験方法
JIS D 6001:1999 フォークリフトトラック−安全基準
JIS D 6024:1998 フォークリフトトラック−フック式フォーク及びフィンガバーの取付寸法並
びに構造