D 61851-24:2014
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 システム構成 ··················································································································· 2
5 デジタル通信アーキテクチャ ······························································································ 2
6 充電制御プロセス ············································································································· 3
7 充電制御の概要 ················································································································ 3
8 DC充電制御のために送受信される情報 ················································································ 3
附属書A(規定)システムAのDC充電ステーションの制御のためのデジタル通信 ·························· 5
附属書B(規定)システムBのDC充電ステーションの制御のためのデジタル通信·························· 16
附属書C(規定)システムCのDC充電ステーションの制御のためのデジタル通信 ························· 21
参考文献 ···························································································································· 23
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 24
附属書JB(参考)JISと対応国際規格との対比表(対応国際規格編集上の誤記) ···························· 25
D 61851-24:2014
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人日本自動車研究所(JARI)か
ら,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,
経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS D 61851の規格群には,次に示す部編成がある。
JIS D 61851-23 第23部:直流充電ステーション
JIS D 61851-24 第24部:直流充電制御のための直流充電ステーションと電気自動車との間のデジタル
通信
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 61851-24:2014
電気自動車コンダクティブ充電システム−
第24部:直流充電制御のための直流充電
ステーションと電気自動車との間のデジタル通信
Electric vehicle conductive charging system-
Part 24: Digital communication between a d.c. EV charging station and
an electric vehicle for control of d.c. charging
序文
この規格は,2014年に第1版として発行されたIEC 61851-24を基とし,我が国の使用実態を反映させ
るため技術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
この規格は,コンダクティブ接続による直流充電ステーション及び電気自動車の充電制御デジタル通信
の基本的要件を規定している。
1
適用範囲
この規格は,JIS D 61851-23とともに,入力電圧が交流(AC)600 V又は直流(DC)750 Vまでのコン
ダクティブ充電における,電気自動車(以下,EVという。)用DC充電ステーションとEVとの間のDC
充電制御デジタル通信について規定する。
EV充電モードは,JIS D 61851-23に従い,モード4である。この規格は,高電圧AC電源に接続する充
電ステーションを除く。
この規格の附属書A〜附属書Cは,JIS D 61851-23に規定するDC充電システムA,DC充電システムB
及びDC充電システムCに固有のDC充電制御のためのデジタル通信をそれぞれ規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61851-24:2014,Electric vehicle conductive charging system−Part 24: Digital communication
between a d.c. EV charging station and an electric vehicle for control of d.c. charging(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
2
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS D 61851-23 電気自動車コンダクティブ充電システム−第23部:直流充電ステーション
注記 対応国際規格:IEC 61851-23:2014,Electric vehicle conductive charging system−Part 23: DC
electric vehicle charging station(MOD)
ISO 11898-1:2003,Road vehicles−Controller area network (CAN)−Part 1: Data link layer and physical
signalling
ISO 11898-2:2003,Road vehicles−Controller area network (CAN)−Part 2: High-speed medium access unit
ISO/IEC 15118-1,Road vehicles−Vehicle to grid communication interface−Part 1: General information and
use-case definition
ISO/IEC 15118-2,Road vehicles−Vehicle-to-Grid Communication Interface−Part 2: Network and application
protocol requirements
ISO/IEC 15118-3 1),Road vehicles−Vehicle to grid Communication Interface−Part 3: Physical and data link
layer requirements
IEC 61851-1:2010,Electric vehicle conductive charging system−Part 1: General requirements
注1) 発行予定
3
用語及び定義
この規格で用いる主な用語及び定義は,IEC 61851-1及びJIS D 61851-23によるほか,次による。
3.1
デジタル通信(digital communication)
DC充電ステーションとEVとの間で交換されるデジタルコード化した情報及びその情報を交換する方
式。
3.2
パラメータ(parameter)
充電制御に関連し,デジタル通信を用いてDC充電ステーションとEVとの間で交換される単一の情報。
3.3
信号(signal)
デジタル通信以外の手段を用いてDC充電ステーションとEVとの間でやり取りされるデータ要素。
4
システム構成
システム構成は,JIS D 61851-23の102.2に従わなければならない。
5
デジタル通信アーキテクチャ
この規格においては,次の二つのデジタル通信アーキテクチャを用いる。
− 専用データ通信回線を用いるCANに基づくもの。CANプロトコルは,ISO 11898-1に規定されている。
固有の実装詳細については,附属書A及び附属書Bを参照。
− コントロールパイロット回路を利用した電力線通信(Homeplug Green PHYTM)2)に基づくもの。固有
の実装詳細については,附属書Cを参照。
注2) Homeplug Green PHYTMは入手可能な製品の一例である。この情報は規格の使用者の便宜のた
めに対応国際規格に記載されているものであって,IEC及びJISによるこの製品の推薦を意
味するものではない。
3
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
充電制御プロセス
充電制御プロセスは,JIS D 61851-23の102.5に従わなければならない。
7
充電制御の概要
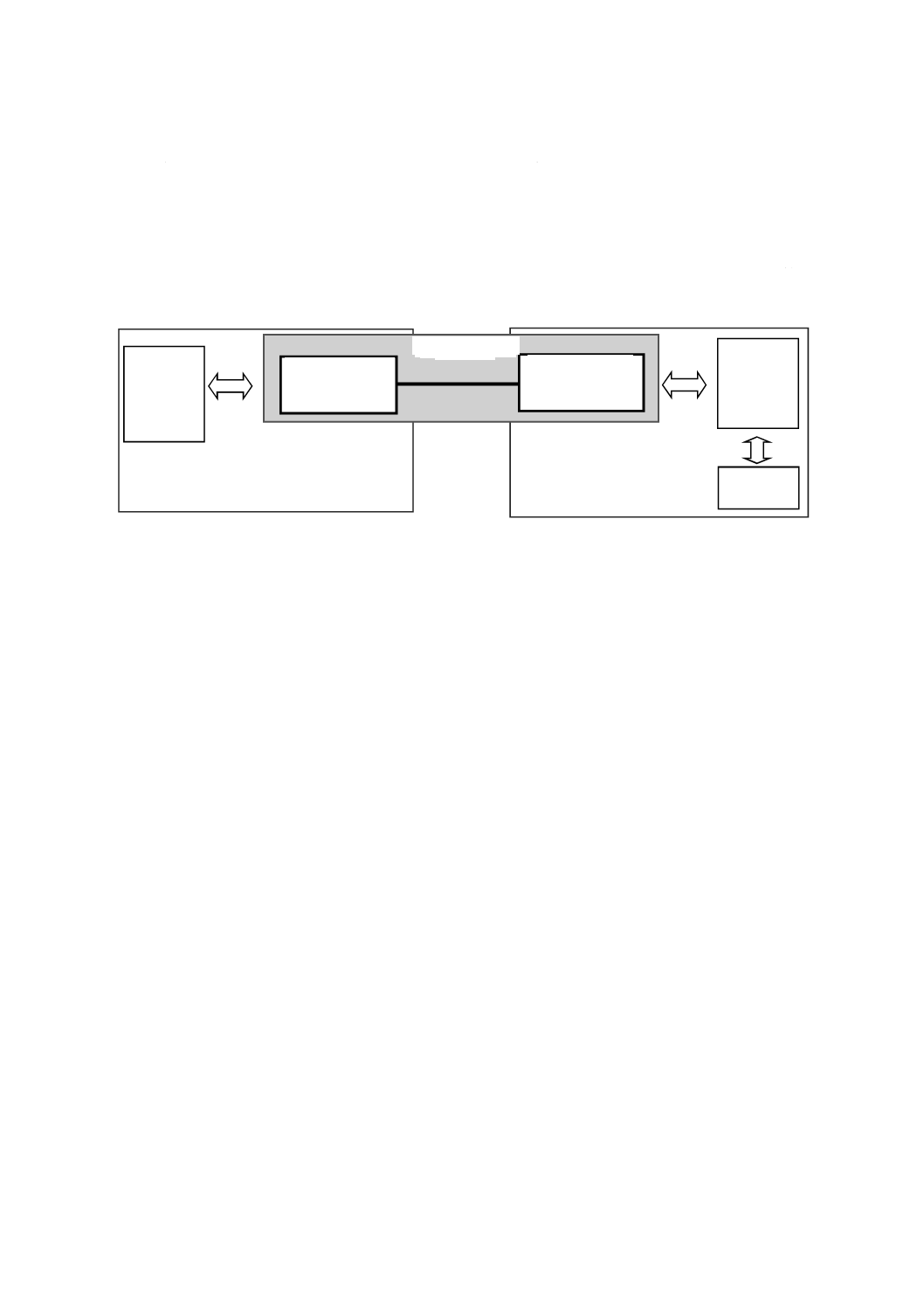
この規格が対象とするDC充電制御のデジタル通信を図1に示す。この規格は,DC充電ステーション
のAC/DCインバータのための電力制御プロトコルや,車載二次電池(以下,電池という。)の電池管理制
御のような,DC充電ステーション内部又は車両内部の制御プロトコルを対象としない。
Electric Vehicle
VCCF
(DC
charging
control
function)
Controller
DCCCF
(DC
charging
control
function)
D.C.EV charging station
Digital
communication
interface
Digital
communication
interface
IEC 61851-24
(DC充電制
御機能)
デジタル通信
インタフェース
デジタル通信
インタフェース
(車両充電
制御機能)
コントローラ
電気自動車
DC充電ステーション
図1−DC充電ステーションとEVとの間のDC充電制御のためのデジタル通信
8
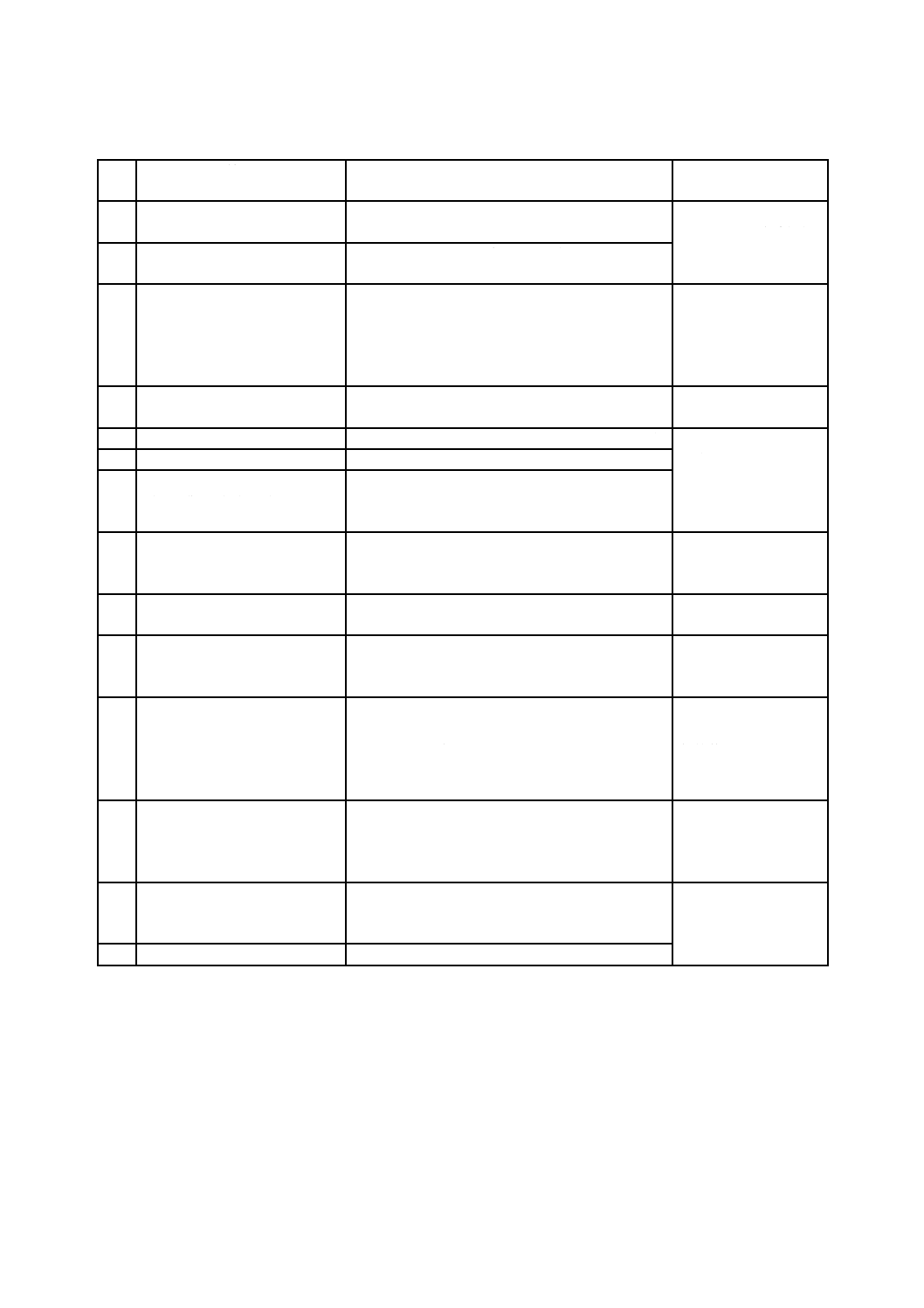
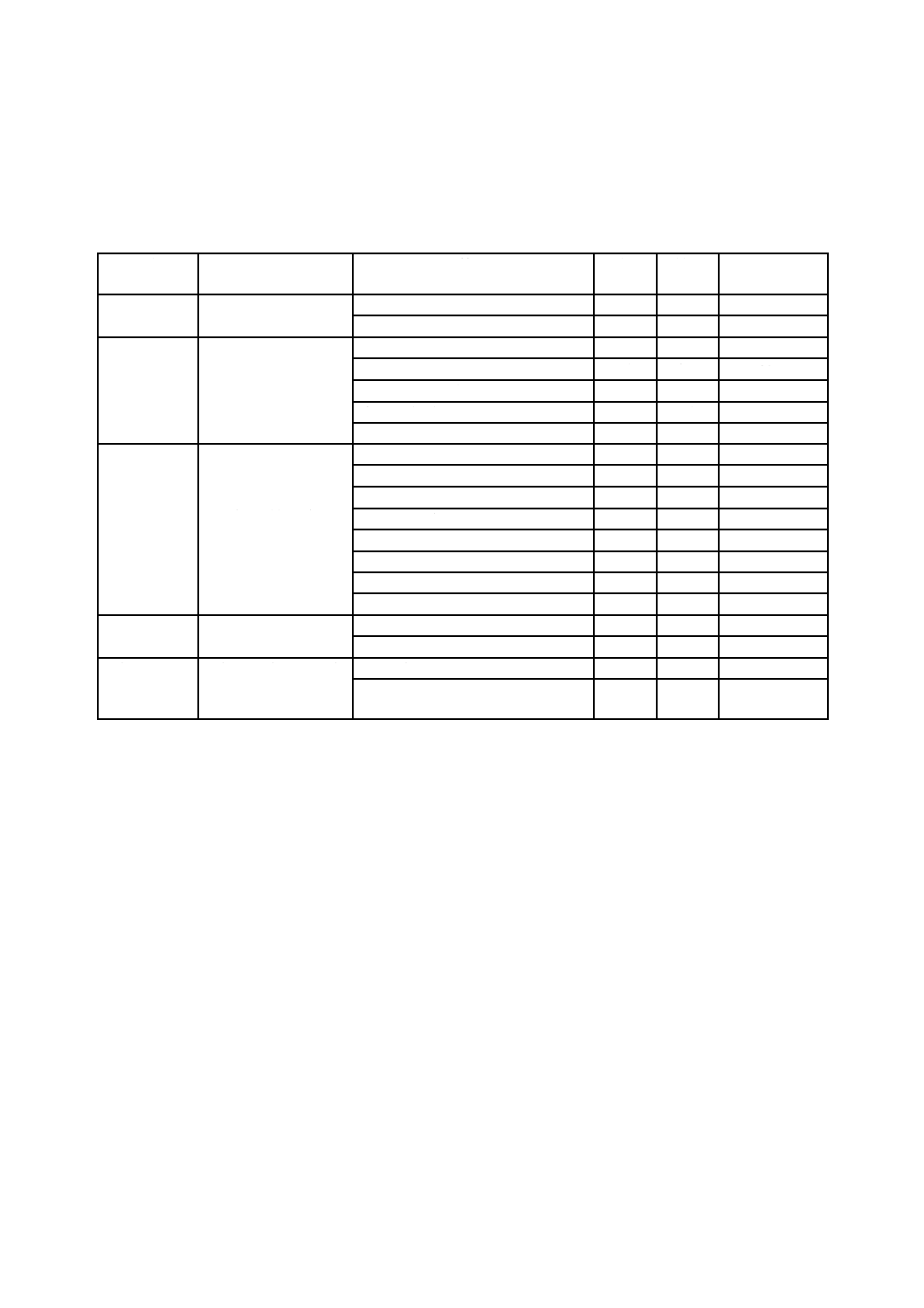
DC充電制御のために送受信される情報
この箇条は,JIS D 61851-23に規定する充電プロセス中に,DC充電ステーションと車両との間で交換す
る情報を規定する。表1の情報は,附属書A〜附属書Cに規定するシステムに共通の要件である。表1に
示す各情報は,各附属書においてパラメータとして定義されている。各システムに必要な追加的なパラメ
ータは,それぞれ附属書で規定する。
この規格
4
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−DC充電制御のための情報送受信
No.
情報
説明
JIS D 61851-23の
関係項目
a-1
電流制御充電(CCC)システム
による電流要求
EVが要求する電流指令値の送受信
6.4.3.101
EVのための直流供給
a-2
電圧制御充電(CVC)システム
による電圧要求
EVが要求する電圧指令値の送受信
a-3
DC充電ステーションの最大定
格電圧
DC充電ステーションの最大定格電圧値の交換
− 6.4.3.101
− 6.4.3.105
互換性評価
− 6.4.3.107
電池の過電圧保護
a-4
DC充電ステーションの最大定
格電流
DC充電ステーションの最大定格電流値の交換
− 6.4.3.101
− 6.4.3.105
b-1
通信プロトコル
充電システムのソフトウエアのバージョンの交換
6.4.3.105
互換性評価
b-2
EVの最大電圧限度
車両の最大電圧限度値の交換
b-3
EV最小電流限度
電圧制御充電(CVC)システム
にだけ用いる
検討中
c
絶縁診断結果
充電前に絶縁試験結果を交換
− 絶縁試験が不合格に終わった場合,充電は認
められないという信号が送信される。
6.4.3.106
充電前の絶縁試験
d
充電前の短絡試験
充電前の短絡試験における情報の交換
6.4.3.110
充電前の短絡確認
e
ユーザーによる充電停止
DC充電ステーションのユーザーによる充電停止
命令についての情報の交換
6.4.3.111
ユーザーによる充電停
止
f
供給装置(EVSE)のリアルタ
イムに利用できる負荷電流(任
意)
需要管理のための供給装置のリアルタイムに利用
できる負荷電流の交換。その機能を提供するシス
テムに必要とされる。
6.4.4.2(IEC 61851-1を
参照)
供給装置のリアルタイ
ムで利用可能な負荷電
流の検知/調整
g
デジタル通信の欠落
デジタル通信の欠落の検知
− 受信器がタイムアウト時間内に期待される情
報を得られない場合,デジタル通信の欠落と
みなされる。
9.4
遮断容量
h-1
電流ゼロ確認
ゼロ電流確認の通知
− ステーションは,EVに低電流状態になったこ
とを伝える(コネクタのロック解除を許可)
102.5
充電制御プロセス及び
充電ステート
h-2
溶着確認
溶着検出の全プロセスについての情報の交換
5
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
システムAのDC充電ステーションの制御のためのデジタル通信
A.1 一般事項
この附属書は,JIS D 61851-23の附属書AAに規定するシステムAのDC充電ステーション(以下,シ
ステムAステーション又はステーションという。)のためのDC充電制御デジタル通信の仕様を示す。シ
ステムAに関するより詳細な情報はTS D 0007に記載されている。
A.2 DC充電制御プロセスのデジタル通信アクション
JIS D 61851-23の表103の充電制御プロセスに従った通信動作及びパラメータを,表A.1に示す。
6
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
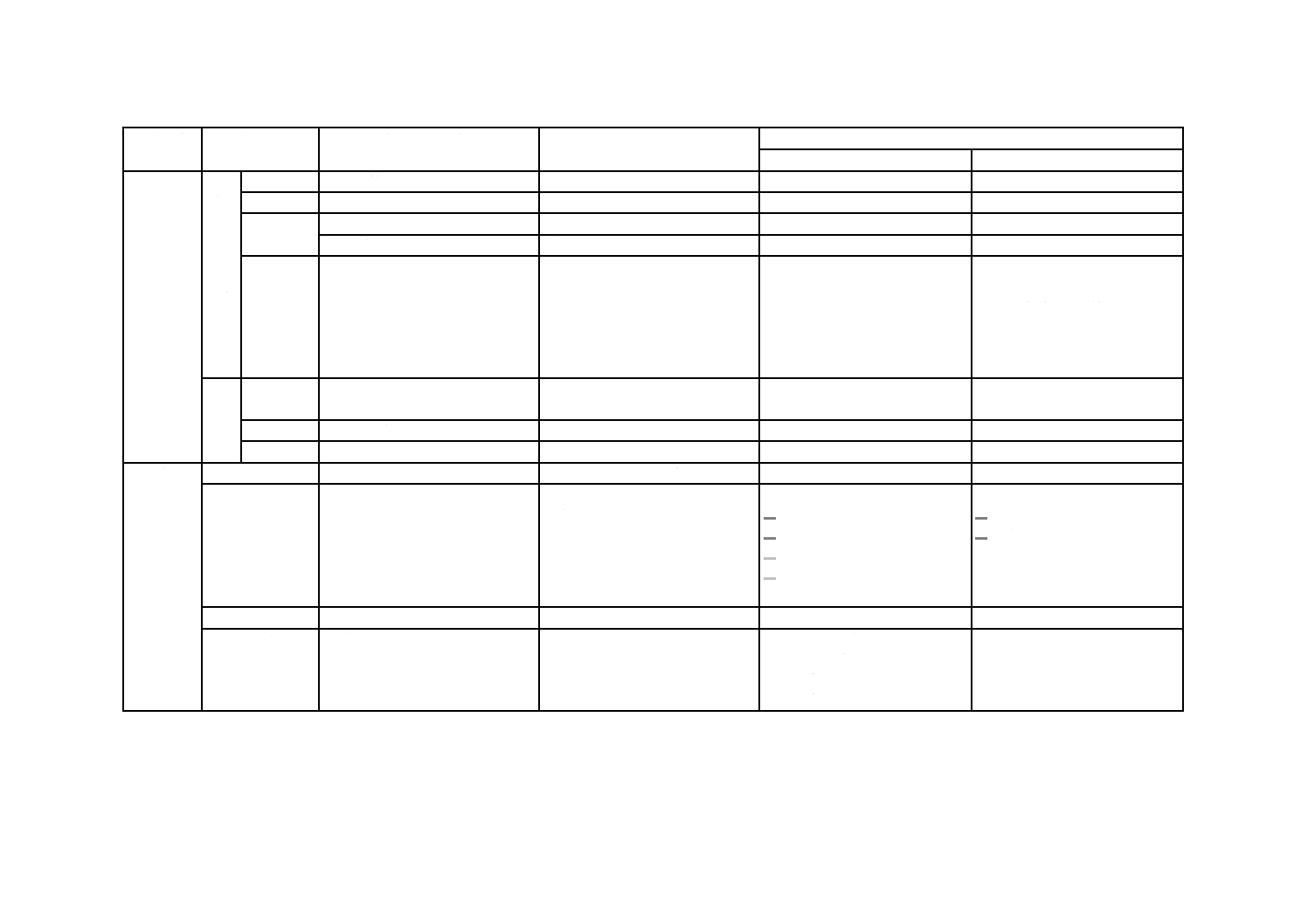
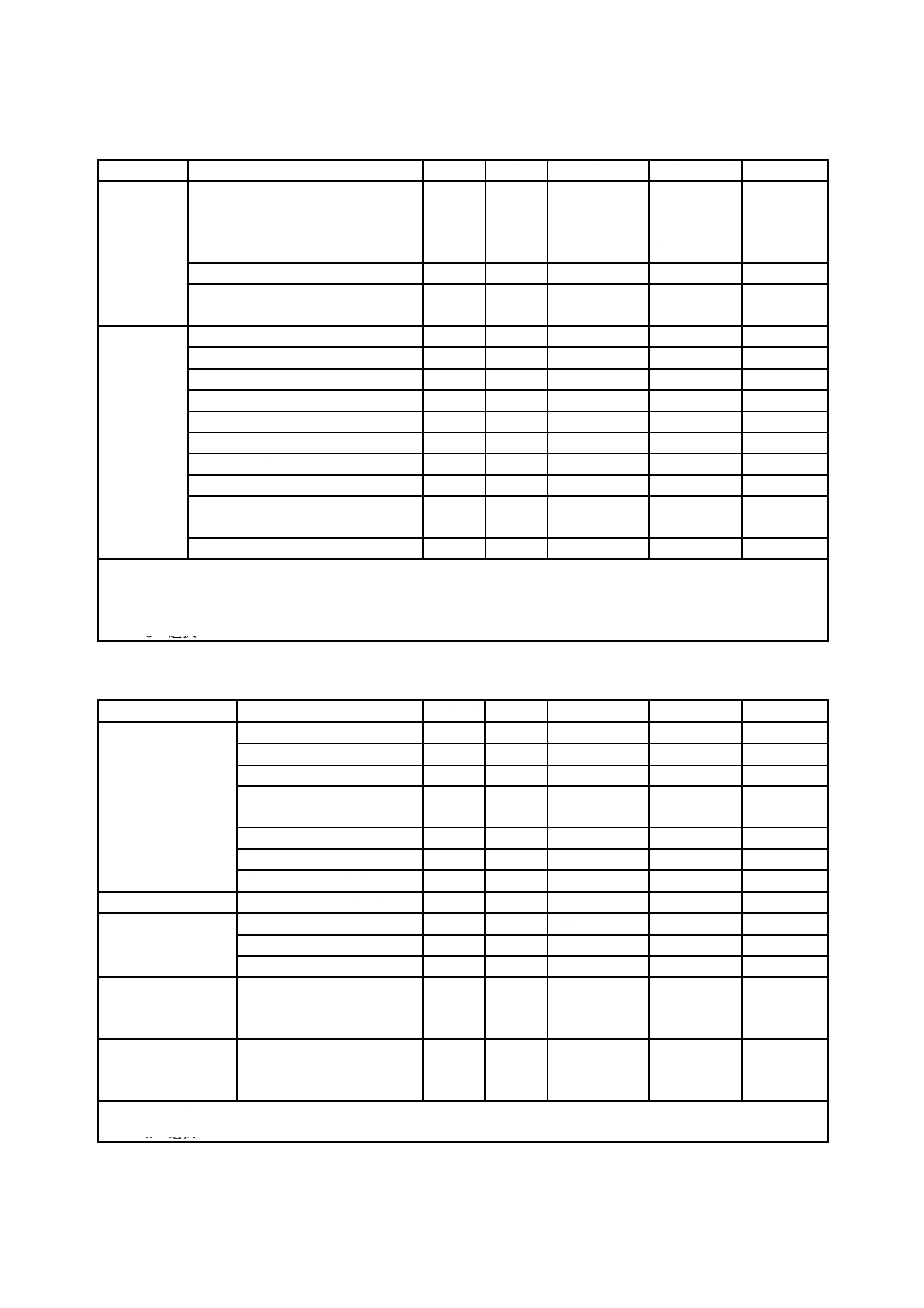
表A.1−DC充電制御中のシステムA充電ステーションと車両との間の通信動作及びパラメータ
充電制御
ステージ
充電ステート
高レベル動作a)
デジタル通信動作
パラメータ
DC充電ステーションから
車両から
初期条件
設定
ハ
ン
ド
シ
ェ
ー
キ
ン
グ
DC-A
車両未接続
該当せず
適用なし
適用なし
DC-B1
車両コネクタ挿入
該当せず
適用なし
適用なし
DC-B1
DCCCF,VCCFの起動
該当せず
該当せず
(CAN初期値)
通信データ初期化
デジタル通信準備
(CAN初期値)
(CAN初期値)
DC-B1
→DC-B2
通信確立,パラメータ交換及び互
換性確認
充電制御パラメータの交換
‒
充電シーケンス管理番号
‒
出力可能電圧値
‒
出力可能電流値
‒
電池不適合
‒
充電シーケンス管理番号
‒
電池総容量
‒
電池耐力上限値
‒
最大充電時間
‒
充電電圧上限値
‒
車両充電可能
充
電
準
備
DC-B2
→DC-B3
車両コネクタロック
コネクタロック状態の通知
‒
車両コネクタロック
該当せず
DC-B3
DC電力線の絶縁試験
該当せず
充電システム異常
該当せず
DC-B3
事前充電(システム要件による) 適用なし
適用なし
適用なし
電力伝送
DC-C又はDC-D 車両コンタクタ閉
車両コンタクタ閉状態の通知
該当せず
該当せず
DC-C又はDC-D 電流要求による充電(CCC制御) 充電電流(又は電圧)の要求値の
通知
‒
充電器状態
‒
現在出力電圧値
‒
現在充電電流値
‒
残り充電時間
‒
充電器異常
‒
充電システム異常
‒
充電電流指令値
‒
充電システム異常
‒
車両シフト位置
DC-C又はDC-D 電圧要求による充電(CVC制御) 適用なし
適用なし
適用なし
DC-C,(D)
→DC-Bʼ1
電流抑制
電力伝送停止の要求
‒
充電器状態
‒
充電器停止制御
‒
現在出力電圧値
‒
現在充電電流値
車両充電可能
6
D
6
1
8
5
1
-2
4
:
2
0
1
4
7
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
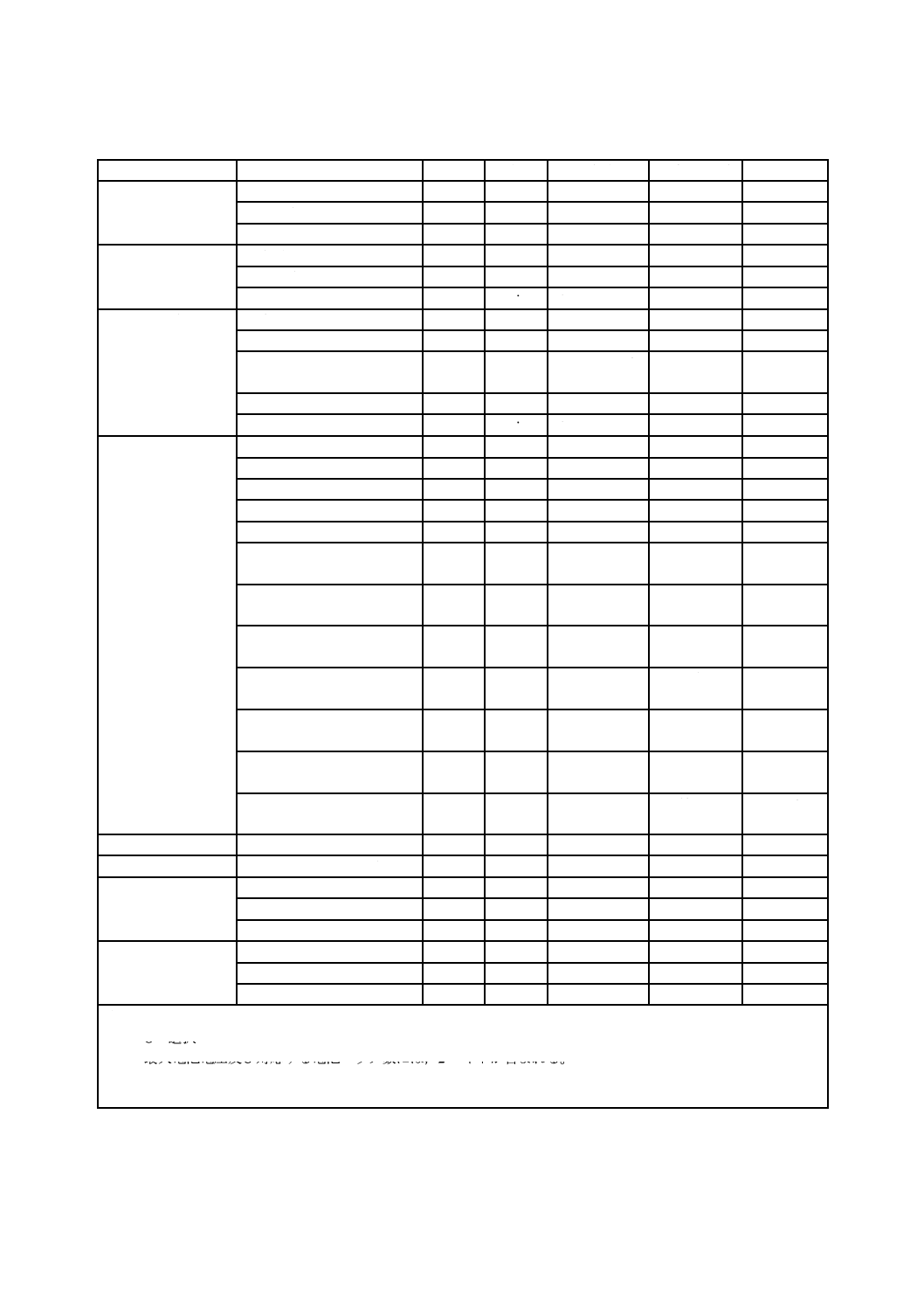
表A.1−DC充電制御中のシステムA充電ステーションと車両との間の通信動作及びパラメータ(続き)
充電制御
ステージ
充電ステート
高レベル動作a)
デジタル通信動作
パラメータ
DC充電ステーションから
車両から
充電停止
DC-Bʼ1
無電流確認
電力伝送停止の要求
‒
充電器状態
‒
充電システム故障
DC-Bʼ1
→DC-Bʼ2
溶着確認(車両が実施)
該当せず
該当せず
DC-Bʼ2
車両側コンタクタ開放
該当せず
該当せず
該当せず
DC-Bʼ2
DC電力線電圧確認
現在電圧の通知
現在出力電圧値
該当せず
DC-Bʼ3
車両コネクタロック解除
コネクタロック解除状態の通知
車両コネクタロック
該当せず
DC-Bʼ4
通信レベルでの充電終了
デジタル通信の完了
該当せず
該当せず
DC-A
車両コネクタ取り外し
適用なし
適用なし
注a) 上記動作の順番は必ずしも充電制御手順を表すものではない。
7
D
6
1
8
5
1
-2
4
:
2
0
1
4
8
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.3 DC充電制御のデジタル通信
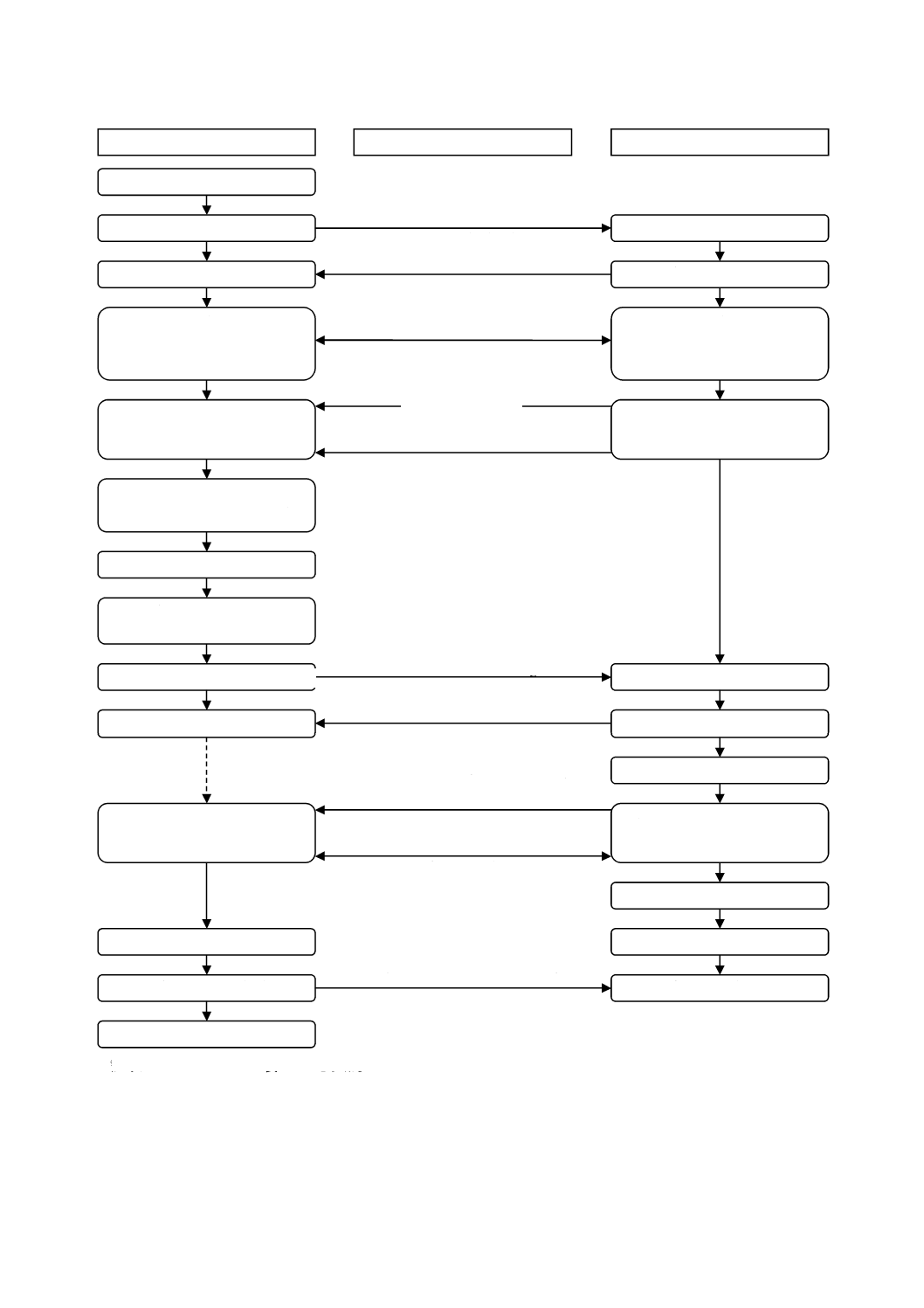
DC充電制御のデジタル通信のためのパラメータは,図A.1に示すシーケンス図に従って交換しなけれ
ばならない。
9
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号はJIS D 61851-23の表AA.1を参照。
図A.1−システムAのDC充電制御通信のシーケンス図
信号/デジタルデータ
車両
DC充電器
スイッチ(d1)on,
信号センシングデバイス(f):on
“充電開始(CP)”信号
デジタル通信
充電開始要求
“充電開始(CP)”信号を送信
CAN通信開始
充電開始前情報処理
(電池の適合性判定,
充電時間計算他)
デジタル通信開始
“充電開始(CP)”信号を受信
充電開始前情報処理
(最大充電時間,
電池情報通知他)
デジタル通信
車両側準備完了を
信号及びパラメータで送信
車両コネクタロック
信号センシングデバイス(j)on,
スイッチ(k)on,
“充電許可(CP3)”信号
“車両充電可能”フラグ
デジタル通信
車両コンタクタ開状態確認
DC出力端電圧 10 V以下
充電主回路の絶縁診断実施
絶縁診断終了確認
(出力端電圧 20 V以下)
“充電開始停止(CP2)”信号送信
車両コンタクタを閉じる
スイッチ(d2)on,
信号センシングデバイス(g)on
“充電開始停止(CP2)”信号
電流出力開始
“充電電流指令”送信
デジタル通信
充電完了
信号及びパラメータによる
充電出力停止要求を送信
充電停止
信号センシングデバイス(j)off
スイッチ(k)off,
“車両充電可能”フラグ
“充電停止制御”フラグ
デジタル通信
主回路電流5 A以下を確認
車両コンタクタを開く
デジタル通信終了
出力端電圧 10 V以下を確認
コネクタロック解除
“車両コネクタロック”フラグ0に変える
デジタル通信
デジタル通信終了
10
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
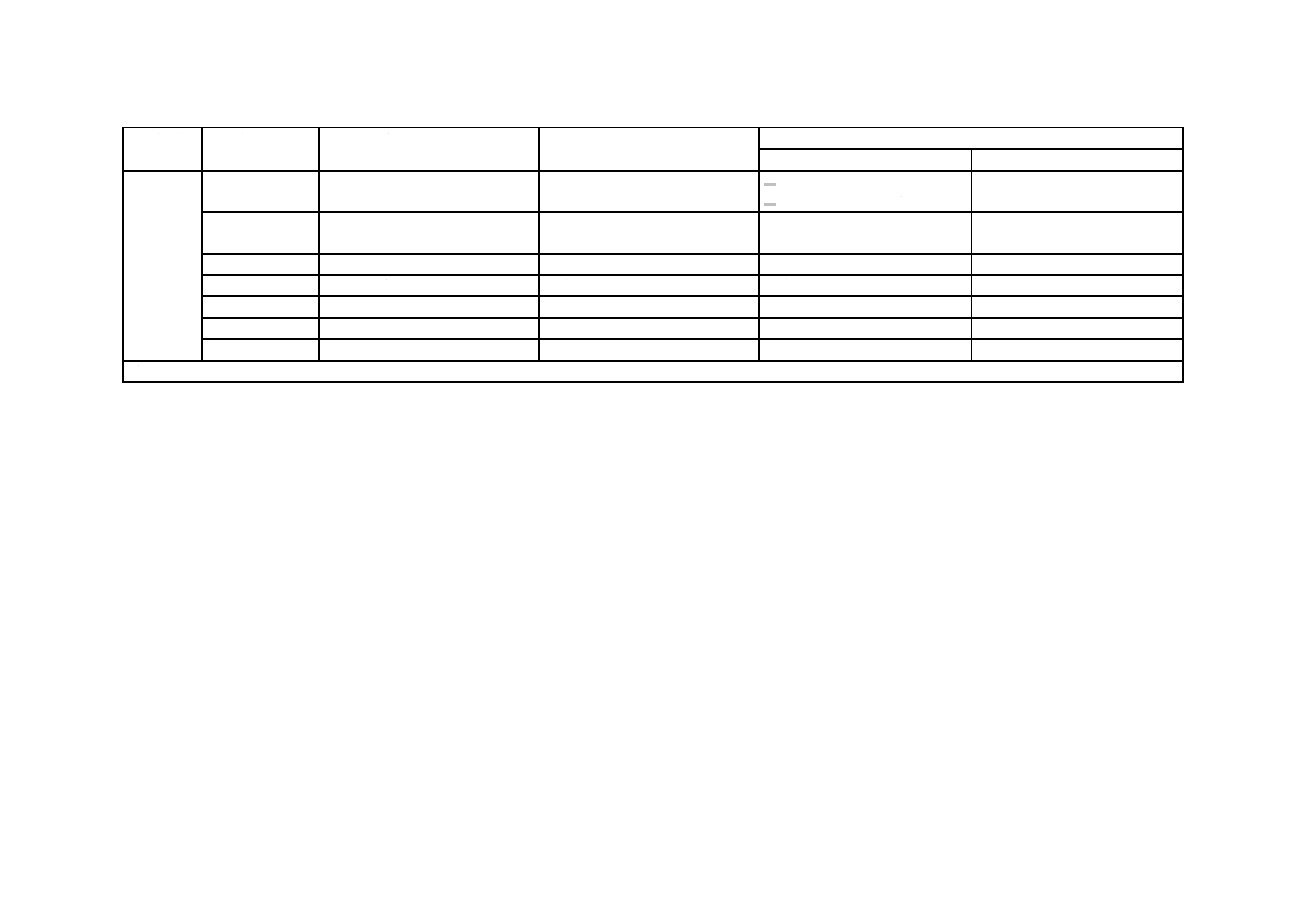
A.4 パラメータ定義
DC充電制御プロセスでのパラメータの定義を,表A.2に示す。
11
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.2−DC充電制御プロセスにおけるシステムAステーションと車両との間の交換パラメータ
表1
パラメータ名
内容
CAN ID
ID.byte (bit)
送信元
受信先
データ
更新周期
単位
状態フラグ
分解能
(範囲)
b-2
電池耐力上限
値
充電器が電池を保護するために充電を停止さ
せる際の判断電圧,インレット端の値
H'100.4,
H'100.5
EV
システム
A充電器
100 ms
V
−
1 V/ビット
電池総容量
電池総容量(カタログ値)
H'101.5,
H'101.6
EV
システム
A充電器
100 ms
kWh
−
0.1 kWh/ビット
充電率表示定
数(表示用)
充電率表示のための電池の最大値を固定値
(100 %)として設定する。
H'100.6
EV
システム
A充電器
100 ms
%
1 %ビット,
100 %(固定)
最大充電時間
(10秒単位)
10秒ごとにEVが充電器に対して許可する充
電時間の最大値
H'101.1
EV
システム
A充電器
100 ms
s
−
10 s/ビット
(0〜2 540 s)
最大充電時間
(1分単位)
1分ごとにEVが充電器に対して許可する充
電時間の最大値
H'101.2
EV
システム
A充電器
min
1 min/ビット
(0〜255 min)
充電終了目安
時間(1分単位)
EVが計算する充電器終了までの目安時間
H'101.3
EV
システム
A充電器
100 ms
min
−
1 min/ビット
(0〜254 min)
使用時にはオ
フセット1を
加算する
b-1
充電シーケン
ス管理番号
EVが対応する充電仕様のバージョン
H'102.0
EV
システム
A充電器
100 ms
−
1/ビット
(0〜255)
充電電圧上限
値
充電目標電圧値。インレット端の値
H'102.1,
H'102.2
EV
システム
A充電器
100 ms
V
−
1 V/ビット
(0〜600 V)
a-1
充電電流指令
値
充電中に車両が充電器に要求する電流値
H'102.3
EV
システム
A充電器
100 ms
A
−
1 A/ビット
(0〜255 A)
充電率(表示
用)
電池の充電率を示す
H'102.6
EV
システム
A充電器
100 ms
%
1 %/ビット
(0〜100 %)
11
D
6
1
8
5
1
-2
4
:
2
0
1
4
12
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.2−DC充電制御プロセスにおけるシステムAステーションと車両との間の交換パラメータ(続き)
表1
パラメータ名
内容
CAN ID
ID.byte (bit)
送信元
受信先
データ
更新周期
単位
状態フラグ
分解能
(範囲)
g
車両充電可能
EVの充電許可状態を示すフラグ
H'102.5(0)
EV
システム
A充電器
−
−
0:不可
1:可能
車両シフト位
置
シフトレバー位置を表す状態フラグ
H'102.5(1)
EV
システム
A充電器
−
−
0:パーキング
1:パーキング以外
充電システム
異常
EVが検出する異常のうち,車両又は充電器に
起因すると判断する異常の有無を示すフラグ
H'102.5(2)
EV
システム
A充電器
−
−
0:正常
1:発生
車両状態
車両コンタクタの状態を示すフラグ
H'102.5(3)
EV
システム
A充電器
−
−
0: 車両コンタクタ閉
又は溶着診断中
1: 車両コンタクタ開
又は溶着診断終了
充電前正常停
止要求
充電前に車両から充電器に充電制御停止を要
求するためのフラグ
H'102.5(4)
EV
システム
A充電器
−
−
0:正常停止要求なし
1:正常停止要求あり
電池過電圧
充電中に電池の電圧がEVの決める上限値に
到達した状況を示す状態フラグ
H'102.4(0)
EV
システム
A充電器
−
−
0:正常,
1:異常
電池不足電圧
充電中に電池の電圧がEVの決める下限値に
到達した状況を示す状態フラグ
H'102.4(1)
EV
システム
A充電器
−
−
0:正常,
1:異常
電池電流差異
車両の充電電流指令値に充電器の出力が追従
しない状態を示すフラグ
H'102.4(2)
EV
システム
A充電器
−
−
0:正常,
1:異常
電池温度高
充電中に電池の温度上限に達した状態を示す
フラグ
H'102.4(3)
EV
システム
A充電器
−
−
0:正常,
1:異常
電池電圧差異
充電器から送られてくる電圧値が車両の電池
電圧と異なる状態を示すフラグ
H'102.4(4)
EV
システム
A充電器
−
−
0:正常,
1:異常
h-2
車両コンタク
タ溶着確認対
応識別子
充電器の出力回路特性が車両コンタクタ溶着
診断に対応しているか否かを表す識別子
H'108.0
システム
A充電器
EV
100 ms
0: 車両コンタクタ溶
着確認に未対応
1: 車両コンタクタ溶
着確認に対応
a-3
出力可能電圧
値
充電器の最大出力電圧値,充電コネクタ端の
値
H'108.1,
H'108.2
システム
A充電器
EV
100 ms
V
−
1 V/ビット
(0〜600 V)
a-4
出力可能電流
値
充電器の最大出力電流値
H'108.3
システム
A充電器
EV
100 ms
A
−
1 A/ビット
(0〜255 A)
1
2
D
6
1
8
5
1
-2
4
:
2
0
1
4
13
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.2−DC充電制御プロセスにおけるシステムAステーションと車両との間の交換パラメータ(続き)
表1
パラメータ名
内容
CAN ID
ID.byte (bit)
送信元
受信先
データ
更新周期
単位
状態フラグ
分解能
(範囲)
b-2
異常判定電圧
上限値
充電器が電池を保護するために充電停止を行
うための電圧判定値
H'108.4,
H'108.5
システム
A充電器
EV
100 ms
V
1 V/ビット
(0〜600 V)
b-1
充電シーケン
ス管理番号
充電器が対応する充電シーケンス内容を示す
番号
H'109.0
システム
A充電器
EV
100 ms
1 /ビット
(0〜255)
現在出力電圧
値
充電器の出力回路の電圧測定値
H'109.1,
H'109.2
システム
A充電器
EV
100 ms
V
−
1 V/ビット
(0〜600 V)
現在充電電流
値
充電器の出力回路電流の測定値
H'109.3
システム
A充電器
EV
100 ms
A
−
1 A/ビット
(0〜255 A)
残り充電時間
(10秒単位)
充電時間の残り時間(10秒単位)
H'109.6
システム
A充電器
EV
100 ms
s
10 s/ビット
(0〜2 540 s)
残り充電時間
(1分単位)
充電時間の残り時間(1分単位)
H'109.7
システム
A充電器
EV
100 ms
min
1 min/ビット
(0〜255 min)
c
h-1
充電器状態
充電器が充電電力を出力していることを示す
フラグ
H'109.5(0) システム
A充電器
EV
100 ms
−
0:待機中,
1:充電中
充電器異常
充電器が検出する異常のうち,充電器に起因
すると判断する状態フラグ。
H'109.5(1) システム
A充電器
EV
100 ms
−
0:正常,
1:異常
車両コネクタ
ロック
コネクタの電磁ロック状態を示すフラグ
H'109.5(2) システム
A充電器
EV
100 ms
−
0:開放
1:ロック中
電池不適合
充電器出力電圧が電池の充電に適さない場合
に発報するフラグ
H'109.5(3) システム
A充電器
EV
100 ms
−
0:適合,
1:不適合
d
充電システム
異常
EV接続状態での充電システムの異常を示す
フラグ。接続状態において充電できないと判
断される状態
H'109.5(4) システム
A充電器
EV
100 ms
−
0:正常,
1:異常
e
充電器停止制
御
充電器の充電制御が停止モードに入ったこと
を表すフラグ
H'109.5(5) システム
A充電器
EV
100 ms
−
0: 出力追従運転中
1: 停止制御中又は停
止状態
1
3
D
6
1
8
5
1
-2
4
:
2
0
1
4
14
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.5 物理層/データリンク層
A.5.1 定義
物理層/データリンク層の仕様を,表A.3に示す。
表A.3−システムAの物理層/データリンク層の仕様
通信システム
通信プロトコル
ISO 11898-1,ISO 11898-2
拡張フォーマットビット(12〜29ビット)は使用しない。
通信速度(kbps) 500
制御周期
100 ms±10 %
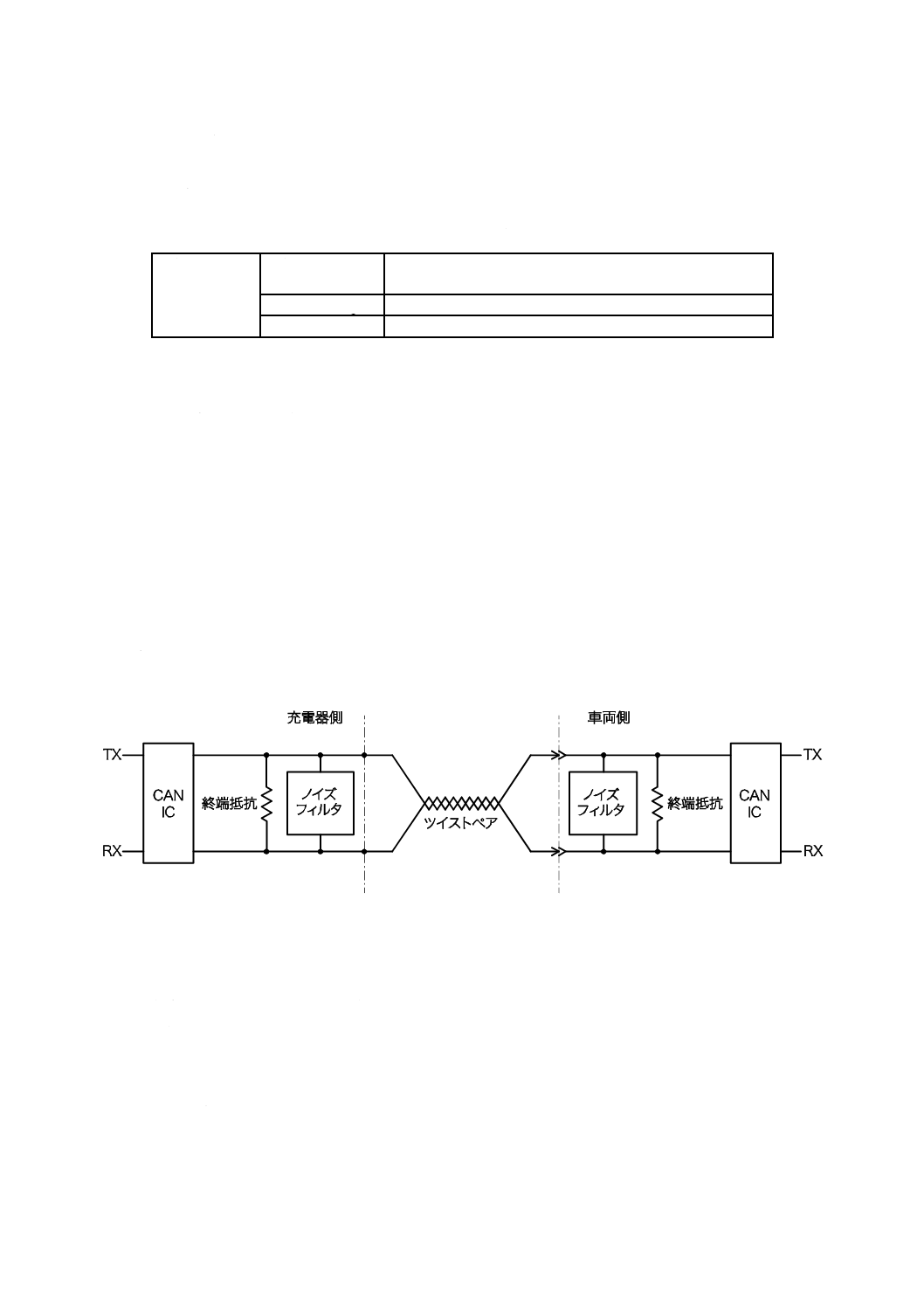
A.5.2 通信回路
CAN(コントローラ・エリア・ネットワーク)通信回路は,パラメータ,すなわち,電圧,電流,状態
フラグ及び故障フラグを交換するために確立されている。これらのパラメータは,充電制御に必要なもの
である。
− 終端抵抗器:1:1通信が仮定されている。車両及びDC充電ステーションは,終端抵抗器を実装しなけ
ればならない。
− ノイズフィルタ:車両及びDC充電ステーションは,コモンモード及びディファレンシャルモードの
伝導雑音を軽減するために,ノイズフィルタを実装しなければならない。
− ツイストペア線:ディファレンシャルモードのノイズを軽減するための,DC充電ステーションを車
両に結びつける通信線に,ツイストペア線を利用しなければならない。
− CANトランシーバ:CANトランシーバは,CAN通信データを送信及び受信するために実装しなけれ
ばならない。
CANバス回路は,図A.2に示すように,DC充電とは独立して確立しなければならない。
図A.2−CANバス回路
A.5.3 送信
データフレームは,表A.2に規定するIDナンバーの昇順で送信しなければならない。データフレーム
は,充電プロセスを通して,100 ms(±10 %)の間隔で連続的に送信しなければならない。
A.5.4 受信
車両又はDC充電ステーションが相手からデータフレームを受信する場合,受信したフレームはエコー
バックしてはならない。また,受信したエラーフレームは,破棄しなければならない。
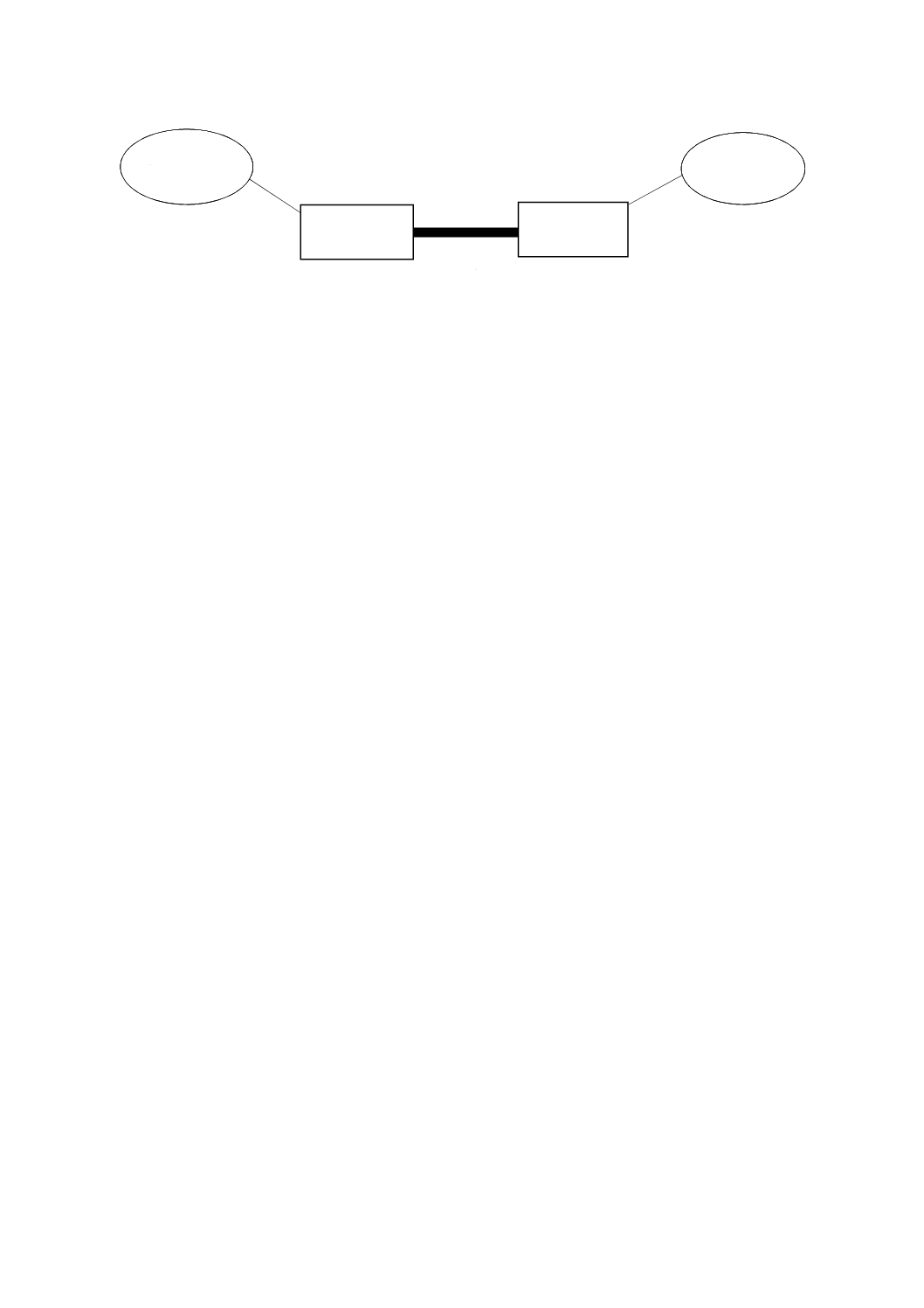
A.5.5 CAN通信
車両とDC充電ステーションとの間の専用CAN通信に関連した基本的な仕様を,図A.3に示す。
15
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.3−EVとDC充電ステーションとの間の専用CAN通信
充電器内
ネットワーク
車両内
ネットワーク
CANバス
DC充電
ステーション
車両
16
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
システムBのDC充電ステーションの制御のためのデジタル通信
B.1
一般事項
この附属書は,JIS D 61851-23の附属書BBに規定するシステムBのDC充電ステーション(以下,シ
ステムBステーション又はシステムB充電器という。)のためのDC充電制御デジタル通信の仕様を示す。
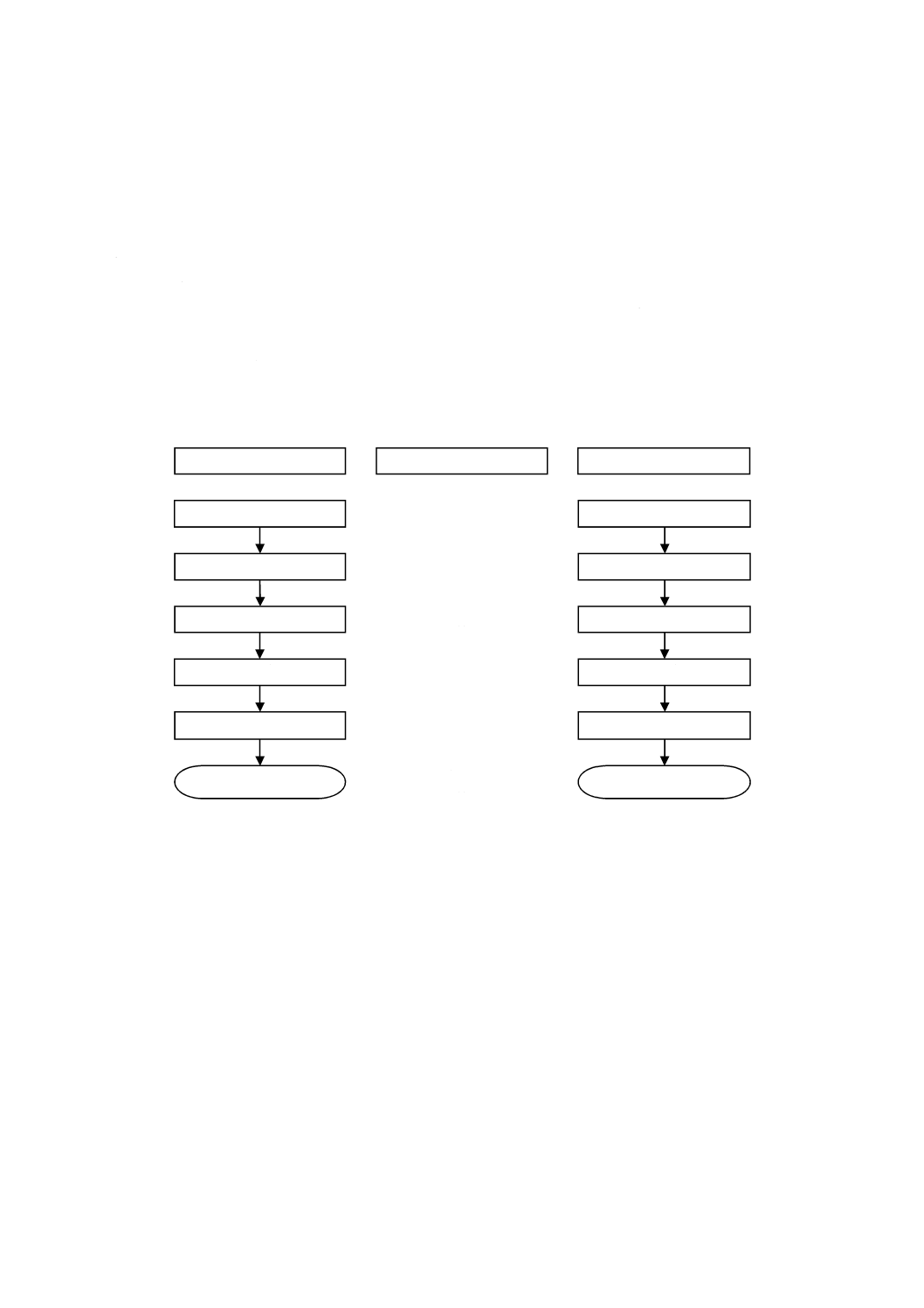
B.2
DC充電制御のデジタル通信
DC充電制御のデジタル通信のためのパラメータは,図B.1に示すシーケンス線図に従って交換しなけ
ればならない。
図B.1−システムBのDC充電制御通信のシーケンス線図
信号/デジタル情報
車両
充電器
信号
⇔
物理的接続及び電源投入
充電のハンドシェーク
充電パラメータ構成
充電
充電終了
切断
デジタル
⇔
信号
⇔
デジタル
⇔
デジタル
⇔
デジタル
⇔
物理的接続及び電源投入
充電のハンドシェーク
充電パラメータ構成
充電
充電終了
切断
17
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.3
充電制御プロセス中のデジタル通信アクション
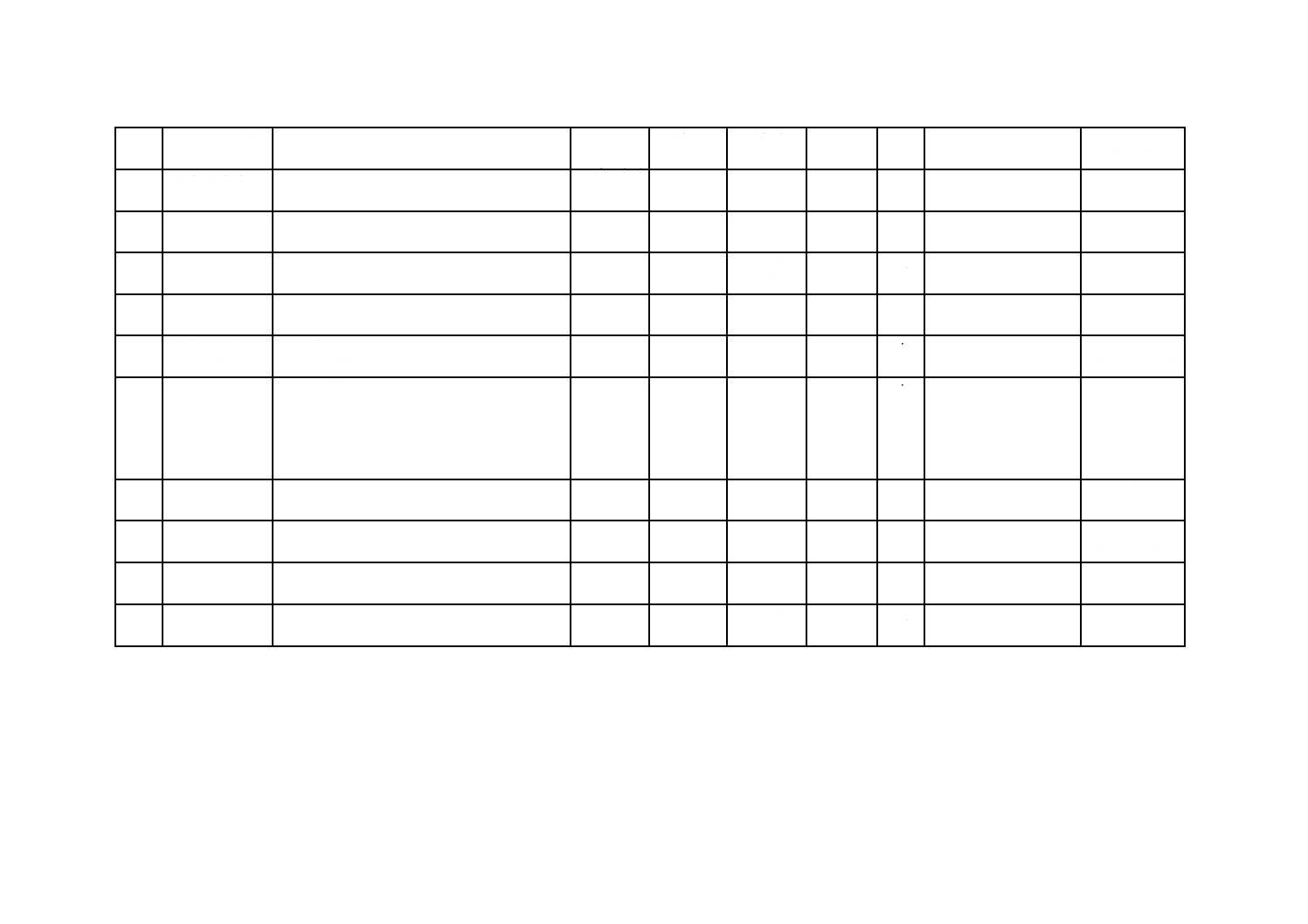
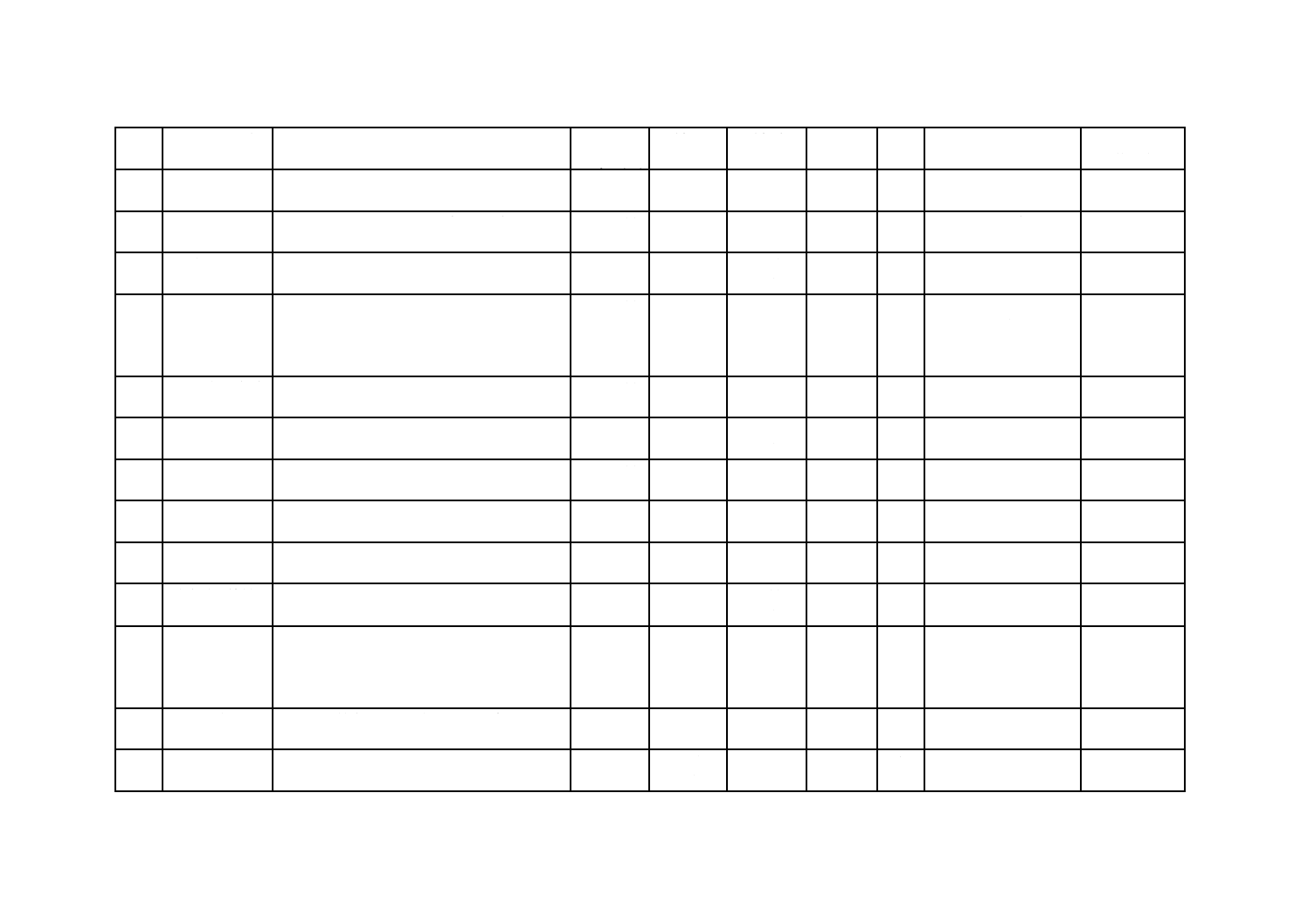
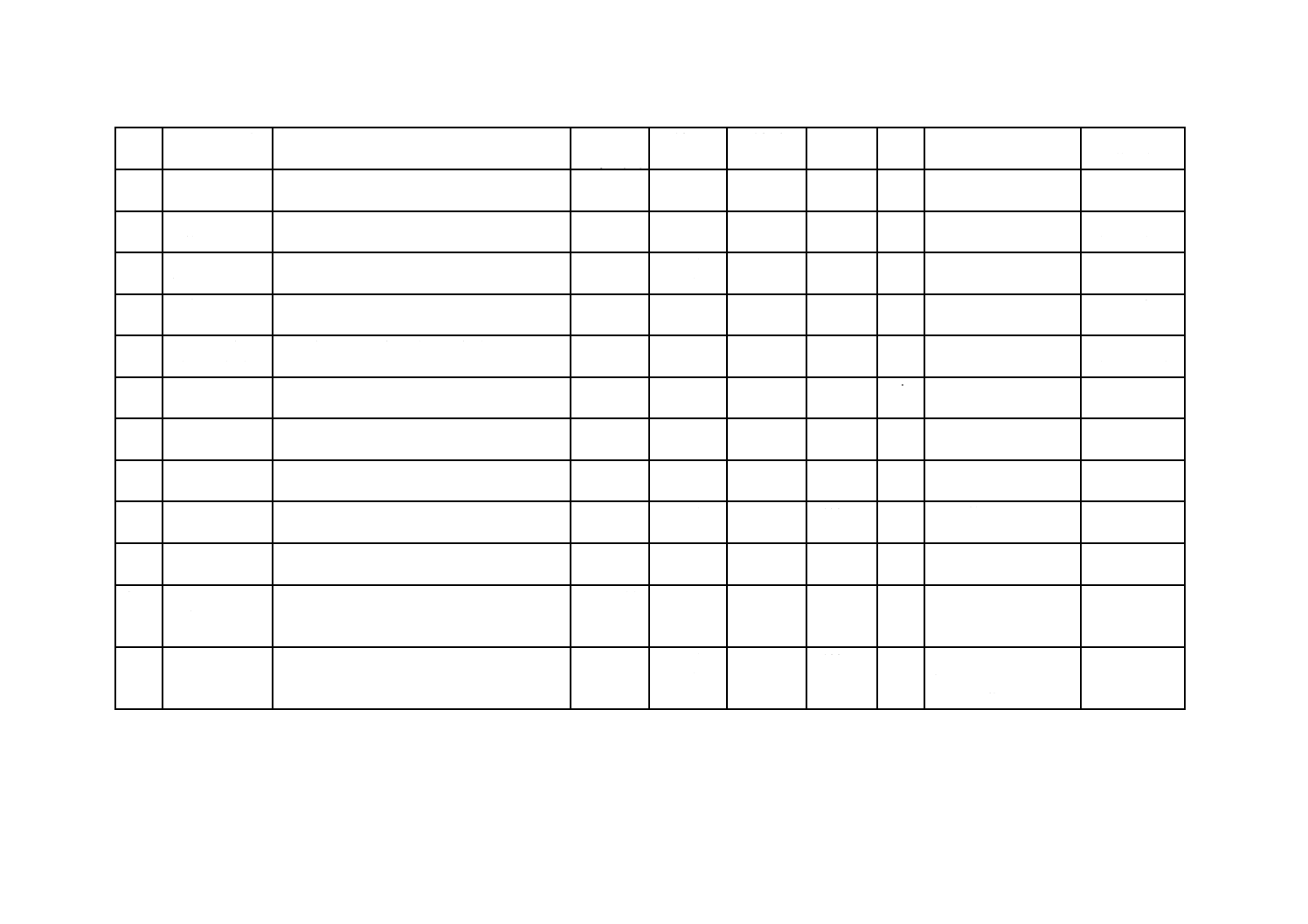
DC充電制御プロセス中の通信アクション及びパラメータを,表B.1に示す。
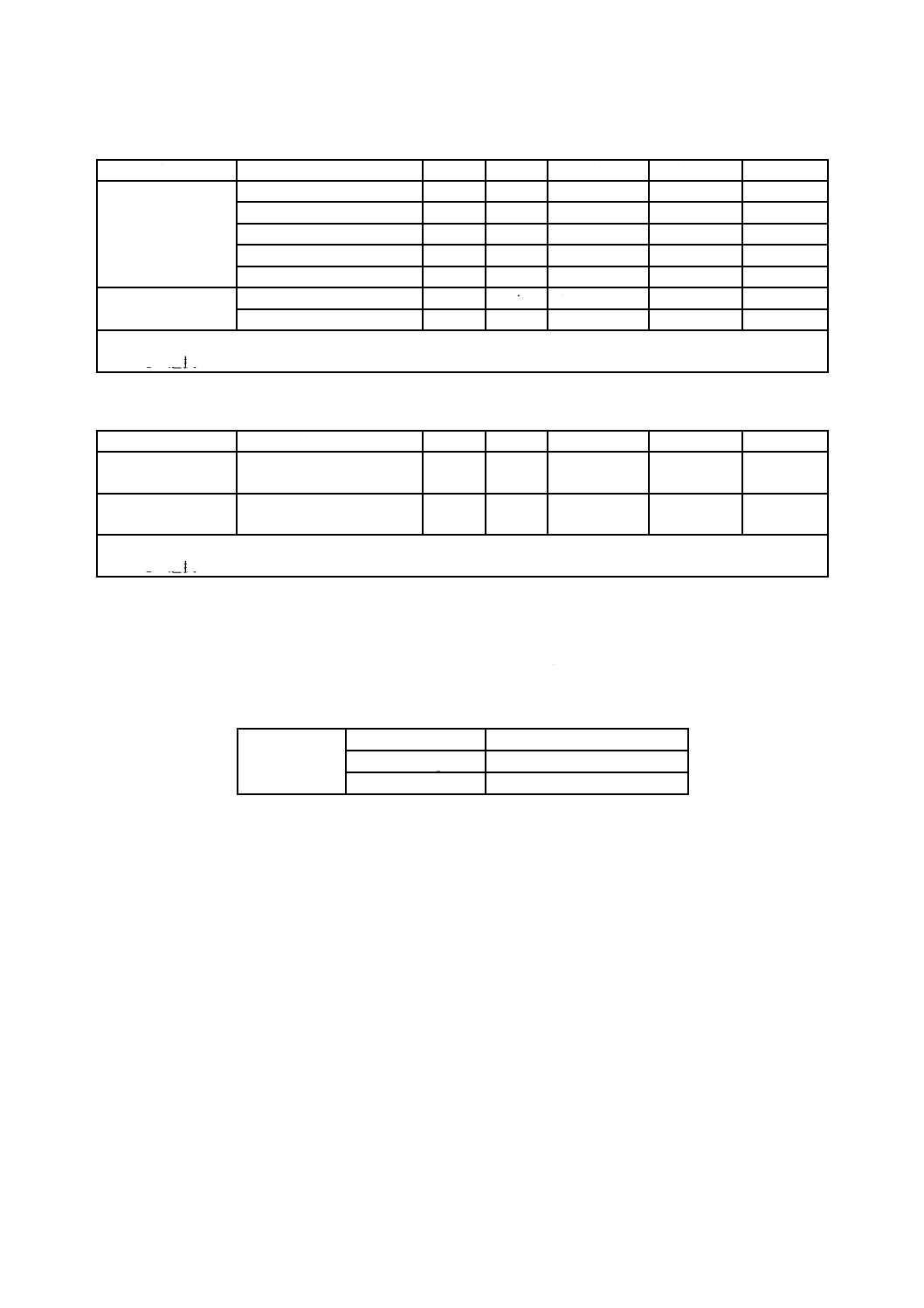
表B.1−システムBのステーションと車両との間のDC充電制御プロセス中の
通信アクション及びパラメータ
充電制御段階
(プロセス)
デジタル通信
アクション
情報
発信元
送信先
パラメータの
サイクル
ハンドシェー
キング
電池及び充電器の必要
なパラメータの確認
充電器認識パラメータ
充電器
車両
250 ms
車両認識パラメータ
車両
充電器
250 ms
充電パラメー
タ構成
充電制御パラメータの
交換
電池充電パラメータ
車両
充電器
500 ms
充電器の時刻同期
充電器
車両
500 ms
充電器の最大/最小出力パラメータ
充電器
車両
250 ms
車両充電可能
車両
充電器
250 ms
充電器出力可能
充電器
車両
250 ms
充電段階
車両によって送信され
る電池充電レベルの要
求に従って,互いに充
電状態を送信し合う。
充電器は,充電プロセ
スを調整する
電池充電要求
車両
充電器
50 ms
充電器充電状態
充電器
車両
50 ms
電池充電状態1
車両
充電器
250 ms
電池充電状態2
車両
充電器
250 ms
電池電圧
車両
充電器
1 s
電池温度
車両
充電器
1 s
車両停止コマンド
車両
充電器
10 ms
充電器停止コマンド
充電器
車両
10 ms
充電終了段階 エネルギー伝送停止
車両統計データ
車両
充電器
250 ms
充電器統計データ
充電器
車両
250 ms
通信エラー
通信プログラムを再起
動する又は充電プロセ
スを停止する
車両受信エラー
車両
充電器
250 ms
充電器受信エラー
充電器
車両
250 ms
B.4
パラメータ定義
DC充電制御プロセス中のパラメータの定義を,表B.2〜表B.6に示す。
18
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表B.2−システムBの充電ハンドシェーク段階におけるパラメータ
情報
パラメータ
Ma)/Ob)
単位
分解能
状態フラグ
表1の項目
充電器認識
パラメータ
認識結果
M
−
−
0x00:認識さ
れていない
0xAA:認識
されている
−
充電器数
M
−
−
−
−
充電器/充電ステーション位置コ
ード
O
−
−
−
−
車両認識
パラメータ
車両通信プロトコルバージョン
M
−
−
−
b-1
電池型式コード
M
−
−
−
−
電池システム定格容量
M
Ah
0.1 Ah/ビット
−
−
電池システム定格電圧
M
V
0.1 V/ビット
−
−
電池製造業者コード,ASCII
O
−
−
−
−
電池パック番号
O
−
−
−
−
電池パック製造年月日
O
−
−
−
−
電池パック充電回数
O
−
1/ビット
−
−
電池パック所有権マーク
O
−
−
0:リース
1:私有
−
車両識別番号(VIN)
O
−
−
−
−
注記 通信プロトコルバージョンは,3バイトを含む。現在のバージョンはV1.0で,バイト3,バイト2−0001H; バ
イト1−00Hと表される。
注a) M=必須
b) O=選択
表B.3−システムBの充電パラメータ構成段階におけるパラメータ
情報
パラメータ
Ma)/Ob)
単位
分解能
状態フラグ
表1の項目
電池充電
パラメータ
電池の最大許容充電電圧
M
V
0.01 V/ビット
−
−
最大許容充電電流
M
A
0.1 A/ビット
−
−
最大許容充電エネルギー
M
kWh
0.1 kWh/ビット
−
−
電池システムの最大許容充
電電圧
M
V
0.1 V/ビット
−
b-2
最高許容温度
M
°C
1 °C/ビット
−
−
初期SOC
M
%
0.1 %/ビット
−
−
電池システムの総電圧
M
V
0.1 V/ビット
−
−
充電器時刻同期
年/月/日/時/分/秒
O
−
−
−
−
充電器最大/最小
出力パラメータ
最大出力電圧
M
V
0.1 V/ビット
−
a-3
最小出力電圧
M
V
0.1 V/ビット
−
−
最大出力電流
M
A
0.1 A/ビット
−
a-4
車両充電可能
車両が充電可能な場合
M
−
−
0x00:準備で
きず。
0xAA:可能
−
充電器出力可能
充電器が充電可能な場合
M
−
−
0x00:準備で
きず。
0xAA:可能
−
注a) M=必須
b) O=選択
19
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表B.4−システムBの充電段階におけるパラメータ
情報
パラメータ
Ma)/Ob)
単位
分解能
状態フラグ
表1の項目
電池充電要求
電圧要求
M
V
0.1 V/ビット
−
a-2
電流要求
M
A
0.1 A/ビット
−
a-1
充電モード
M
−
−
−
−
充電器充電状態
出力電圧
M
V
0.1 V/ビット
−
−
出力電流
M
A
0.1 A/ビット
−
h-1
累積充電時間
M
min
1 min/ビット
−
−
電池充電状態1
測定充電電圧
M
V
0.1 V/ビット
−
−
測定充電電流
M
A
0.1 A/ビット
−
−
最大電池電圧及び対応する
電池パック番号c)
M
V
0.01 V/ビット
−
−
SOC
M
%
1 %/ビット
−
−
推定残余時間
M
min
1 min/ビット
−
−
電池充電状態2
最大電池電圧の電池数
M
−
−
−
−
最高電池温度
M
°C
1 °C/ビット
−
−
最高温度の検査ポイント数
M
−
−
−
最低電池温度
M
°C
1 °C/ビット
−
−
最低温度の検査ポイント数
M
−
−
−
−
電池電圧過高
M
−
−
0:通常
1:過高
−
電池電圧過低
M
−
−
0:通常
1:過低
−
電池充電過電流
M
−
−
0:通常
1:過電流
−
電池温度過高
M
−
−
0:通常
1:過高
−
電池絶縁状態
M
−
−
0:通常
1:異常
−
電池出力コネクタの接続状
態
M
−
−
0:通常
1:異常
−
充電許可
M
−
−
0:禁止
1:許可
c,d
電池電圧
各電池の電圧
O
V
0.01 V/ビット
−
−
電池温度
各検査ポイントの温度
O
°C
1 °C/ビット
−
−
車両停止コマンド
車両停止理由
M
−
−
−
−
車両停止失敗理由
M
−
−
−
h-2
車両停止エラー理由
M
−
−
−
−
充電器停止コマン
ド
充電器停止理由
M
−
−
−
e
充電器停止失敗理由
M
−
−
−
−
充電器停止エラー理由
M
−
−
−
−
注a) M=必須
b) O=選択
c) 最大電池電圧及び対応する電池パック数には,2バイトが含まれる。
1−12ビット:電池システムにおける最大電池電圧,0.01 V/ビット。
13−16ビット:最大電池電圧が発生した電池パック数,1/ビット。
20
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表B.5−システムBの充電終了段階におけるパラメータ
情報
パラメータ
Ma)/Ob)
単位
分解能
状態フラグ
表1の項目
車両統計データ
最終SOC
M
%
1 %/ビット
−
−
最小電池電圧
M
V
0.01 V/ビット
−
−
最大電池電圧
M
V
0.01 V/ビット
−
−
最低電池温度
M
°C
1 °C/ビット
−
−
最高電池温度
M
°C
1 °C/ビット
−
−
充電器統計データ
累積充電時間
M
min
1 min/ビット
−
−
累積出力エネルギー
M
kWh
0.1 kWh/ビット
−
−
注a) M=必須
b) O=選択
表B.6−システムBのエラーパラメータ
情報
パラメータ
Ma)/Ob)
単位
分解能
状態フラグ
表1の項目
車両受信エラー
充電器からの情報のタイム
アウトの受信
M
−
−
−
g
充電器受信エラー
車両からの情報のタイムア
ウトの受信
M
−
−
−
g
注a) M=必須
b) O=選択
B.5
物理層/データリンク層
物理層/データリンク層の仕様を表B.7に示す。物理層/データリンク層は,SAE J1939-11及びSAE J
1939-21を参照している。アプリケーション層は,GB/T 27930を参照している。
表B.7−システムBの物理層/データリンク層の仕様
通信システム
通信プロトコル
CAN 2.0B,ISO 11898-1
伝送速度(kbps)
250
サイクル
10/50/250/500/1 000 ms±10 %
21
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
システムCのDC充電ステーションの制御のためのデジタル通信
C.1 一般事項
JIS D 61851-23の附属書CCに規定するシステムCのDC充電ステーションのためのデジタル通信は,
DIN SPEC 70121,ISO/IEC 15118-1,ISO/IEC 15118-2及びISO/IEC 15118-3に規定されている。
さらに,SAE J2836/2TM,SAE J2847/2,SAE J2931/1及びSAE J2931/4の仕様書も,参考として用いる
ことができる。
このシステムには,次の機能が含まれる。
・ 暗号化,署名,鍵管理などを含む安全コンセプト
・ 頑健なPLCによる通信
・ 自動アドレス割当て及び自動アドレス関連付け
・ IPv6による通信
・ 圧縮XMLメッセージ
・ クライアント・サーバ・アプローチ
・ ケーブルチェック,溶着検知などを含む安全コンセプト
・ 付加価値サービスのための拡張コンセプト
C.2 必要な交換パラメータ
表1に対応するDC充電制御のために交換すべきパラメータを表C.1に示す。追加的なパラメータは,
DIN SPEC 70121及びISO/IEC 15118-2を参照することができる。
22
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
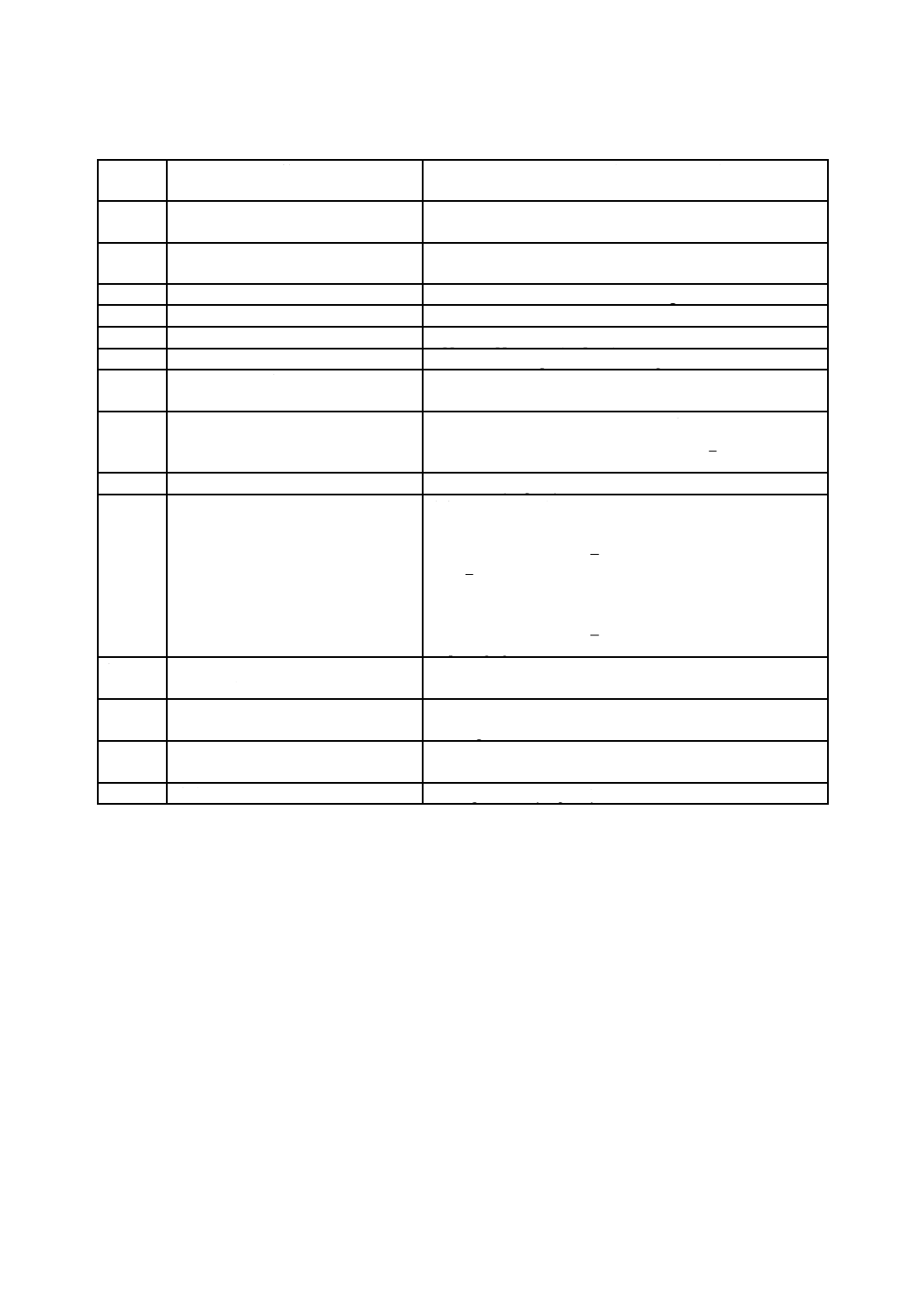
表C.1−システムCのDC充電制御の必要交換パラメータ
表1での
項目
情報
パラメータ名(ISO/IEC 15118-2)
a-1
電流制御充電(CCC)システムによる
電流要求
CurrentDemandReq/EVTargetCurrent
a-2
電圧制御充電(CVC)システムによる
電圧要求
CurrentDemandReq/EVTargetVoltage
a-3
DC充電ステーションの最大定格電圧
CurrentDemandRes/EVSEMaximumVoltageLimit
a-4
DC充電ステーションの最大定格電流
CurrentDemandRes/EVSEMaximumCurrentLimit
b-1
通信プロトコル
supportedAppProtocol{Req,Res}
b-2
EVの最大電圧限度
CurrentDemandReq/EVMaximumVoltageLimit
b-3
EV最小電流限度
ChargeParameterDiscoveryRes / DC̲EVSEChargeParameter /
EVSEMinimumCurrentLimit
c
絶縁診断結果
{PowerDeliveryRes, CableCheckRes, PreChargeRes,
CurrentDemandRes, WeldingDetectionRes} / DC̲EVSEStatus /
EVSEIsolationStatus
d
充電前の短絡試験
CableCheck{Req,Res}
e
ユーザーによる充電停止
{ChargeParameterDiscoveryRes, PowerDeliveryRes,
CableCheckRes, PreChargeRes, CurrentDemandRes,
WeldingDetectionRes} / DC̲EVSEStatus / EVSEStatusCode /
EVSE̲Shutdown
{ChargeParameterDiscoveryRes, PowerDeliveryRes,
CableCheckRes, PreChargeRes, CurrentDemandRes,
WeldingDetectionRes} / DC̲EVSEStatus / EVSENotification /
StopCharging
f
供給装置(EVSE)のリアルタイムに利
用できる負荷電流(任意)
CurrentDemandRes/EVSEMaximumCurrentLimit
g
デジタル通信の欠落
Message timers
Control pilot state
h-1
電流ゼロ確認
PowerDeliveryRes/ResponseCode
CurrentDemandRes/EVSEPresentCurrent
h-2
溶着確認
WeldingDetection{Req, Res}
23
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
TS D 0007 電気自動車用急速充電の基本機能
DIN SPEC 70121,Electromobility−Digital communication between a d.c. EV charging station and an electric
vehicle for control of d.c. charging in the Combined Charging System
SAE J2836/2TM,Use Cases for Communication between Plug-in Vehicles and Off-Board DC Charger
SAE J2847/2 TM,Communication Between Plug-in Vehicles and Off-Board DC Chargers
SAE J2931/1 TM,Digital Communications for Plug-in Electric Vehicles
SAE J2931/4 TM,Broadband PLC Communication for Plug-in Electric Vehicles
24
D 61851-24:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
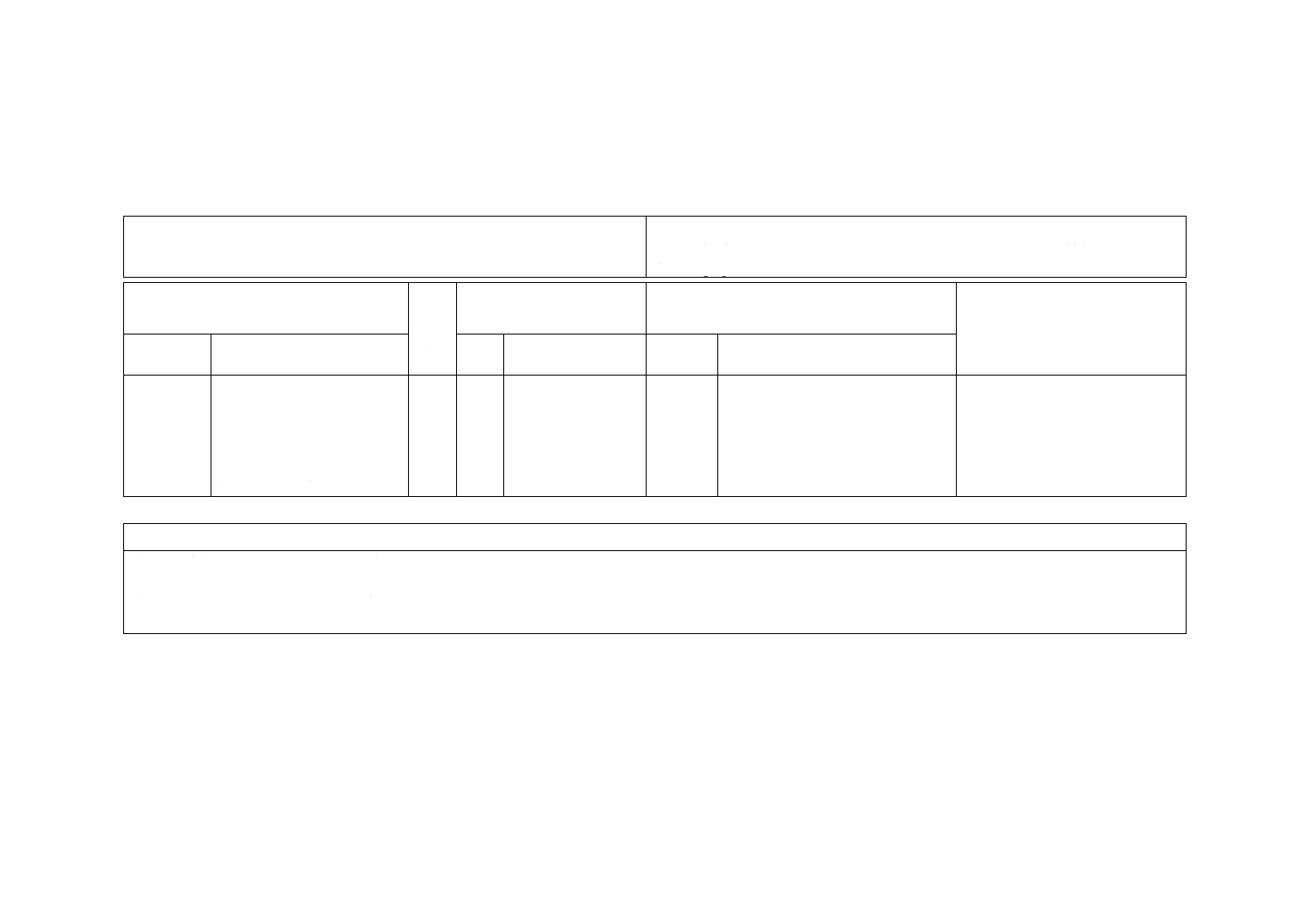
附属書JA
(参考)
JISと対応国際規格との対比表
JIS D 61851-24:2014 電気自動車コンダクティブ充電システム−第24部:直流
充電制御のための直流充電ステーションと電気自動車との間のデジタル通信
IEC 61851-24:2014 Electric vehicle conductive charging system−Part 24: Digital
communication between a d.c. EV charging station and an electric vehicle for control of
d.c. charging
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲 入力電圧がAC 600 V又は
DC 750 Vまでのコンダクテ
ィブ充電における,EV用DC
充電ステーションとEVとの
間のDC充電制御デジタル通
信について規定。
1
JISとほぼ同じ
変更
入力電圧の上限値を変更。
IEC:AC 1 000 V,DC 1 500 V
JIS:AC 600 V,DC 750 V
我が国の配電系統の低電圧区分に
合わせた。配電電圧であり
WTO/TBT協定の基本的技術上の
問題であり,特に提案はしない。
JISと国際規格との対応の程度の全体評価:IEC 61851-24:2014,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
1
8
D
6
1
8
5
1
-2
4
:
2
0
1
4
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
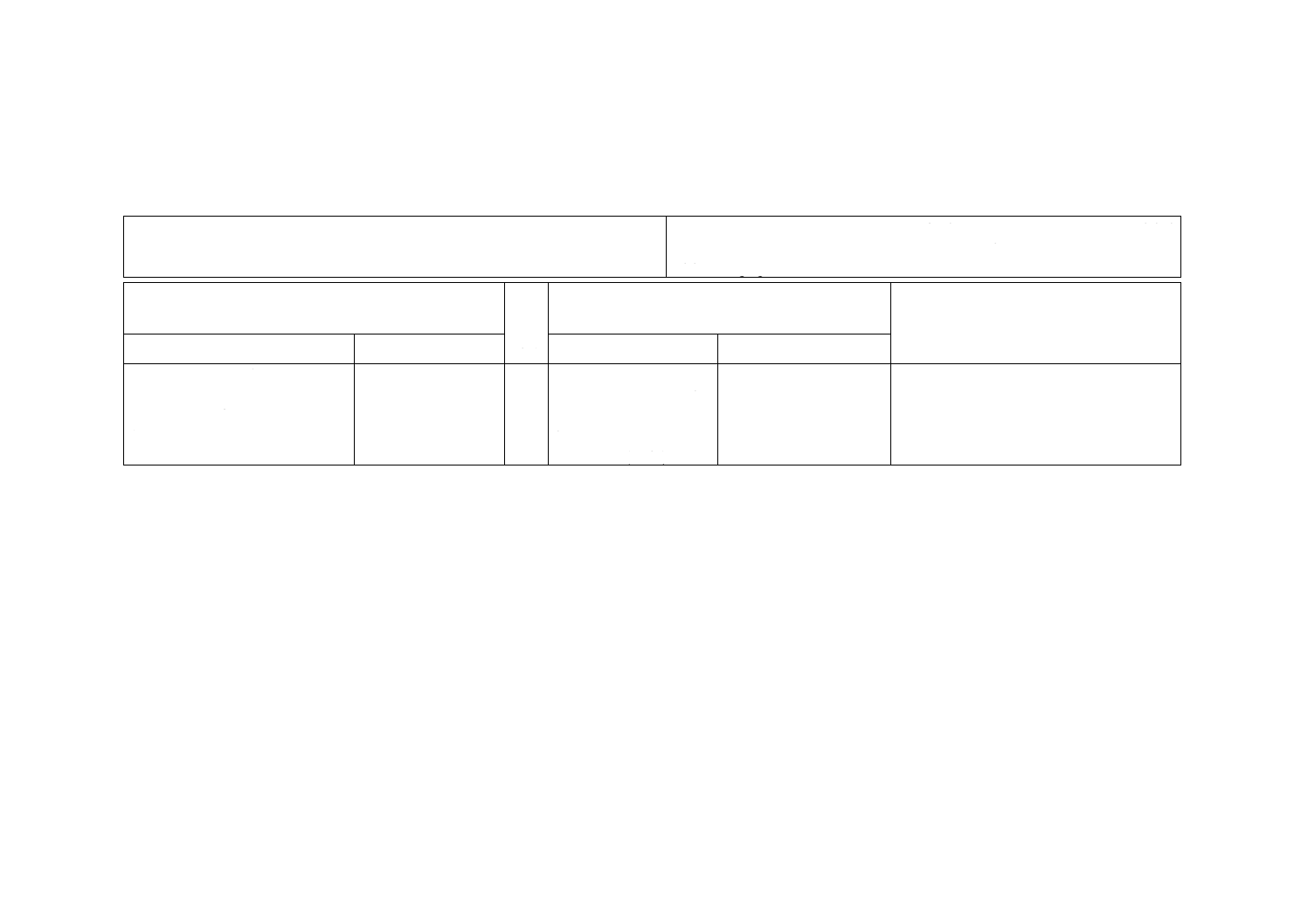
附属書JB
(参考)
JISと対応国際規格との対比表(対応国際規格編集上の誤記)
JIS D 61851-24:2014 電気自動車コンダクティブ充電システム−第24部:直流充電
制御のための直流充電ステーションと電気自動車との間のデジタル通信
IEC 61851-24:2014 Electric vehicle conductive charging system−Part 24: Digital
communication between a d.c. EV charging station and an electric vehicle for control
of d.c. charging
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との差異の理由及び今
後の対策
箇条番号及び題名
内容
箇条番号
内容
表A.2−DC充電制御プロセスにお
けるシステムAステーションと車
両との間の交換パラメータ 2行
目
0.1 kWh/ビット
Table A.2 ‒ Exchanged
parameter
during
d.c.
charging control process
between system A station
and vehicle (1 of 4)
0.11 kWh/bit
対応国際規格編集上の誤記。
次回IEC規格改正時に修正を提案する。
1
8
D
6
1
8
5
1
-2
4
:
2
0
1
4