D 1024-2:2016
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 2
4 記号及び単位 ··················································································································· 4
5 測定装置························································································································· 6
5.1 音響測定装置 ················································································································ 6
5.2 エンジン回転速度及び速度測定装置··················································································· 6
5.3 気象条件観測装置 ·········································································································· 6
6 音響環境,気象条件及び暗騒音 ··························································································· 6
6.1 試験場 ························································································································· 6
6.2 気象条件 ······················································································································ 7
6.3 暗騒音 ························································································································· 7
7 カテゴリL3の車両(PMR > 25の場合)の加速度の規定 ······················································ 8
7.1 一般 ···························································································································· 8
7.2 加速度の計算 ················································································································ 8
7.3 目標加速度の計算 ·········································································································· 8
7.4 参照加速度の計算 ·········································································································· 9
7.5 部分加速係数 kP ············································································································ 9
8 試験手順························································································································· 9
8.1 マイクロホンの位置 ······································································································· 9
8.2 車両の条件 ··················································································································· 9
8.3 運転条件 ······················································································································ 9
8.4 測定読取値及び報告値 ··································································································· 13
8.5 測定の不確かさ ············································································································ 14
9 試験報告書 ····················································································································· 15
附属書A(参考)測定の不確かさ ISO/IEC Guide 98-3(GUM)による解析の枠組み ························ 16
附属書B(参考)カテゴリL3の車両(PMR > 25の場合)のフローチャート ······························· 19
附属書C(参考)カテゴリL3の車両(PMR ≦ 25の場合)のフローチャート ······························· 20
附属書D(参考)カテゴリL4及びL5の車両のフローチャート···················································· 21
附属書JA(参考)ISO 362-2制定の経緯 ·················································································· 22
附属書JB(参考)カテゴリL1及びL2の車両(最大車速 ≦ 30 km/hの場合)のフローチャート ······ 23
附属書JC(参考)カテゴリL1及びL2の車両(最大車速 > 30 km/hの場合)のフローチャート ······ 24
附属書JD(参考)JISと対応国際規格との対比表 ······································································ 25
D 1024-2:2016
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,公益社団法人自動車技術会(JSAE)から,
工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経
済産業大臣が制定した日本工業規格である。
これによって,JIS D 1024:1999は廃止され,その一部を分割して制定したこの規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS D 1024の規格群には,次に示す部編成がある。
JIS D 1024-1 第1部:M及びNカテゴリ
JIS D 1024-2 第2部:Lカテゴリ
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 1024-2:2016
自動車の加速時車外騒音試験方法−
第2部:Lカテゴリ
Measurement of noise emitted by accelerating road vehicles-
Engineering method-Part 2: L category
序文
この規格は,ISO 362-2及びISO 9645を基とし,我が国の実情に合わせるため,技術的内容を変更して
作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JDに示す。
ISO 362-2制定の経緯の詳細は,附属書JAに示す。
なお,ISO 362-2の発行を受けて,その試験方法を用いた国連欧州経済委員会規則No.41が04シリーズ
に改正された(以下,UN R41-04という。)。この規格の発行時点では,ISO 362-2とUN R41-04とで内容
に異なるところがあるが,今後,UN R41-04に合わせてISO 362-2が変更される見込みである。このため,
ISO 362-2とUN R41-04とで内容の異なる箇所については,UN R41-04をできるだけ取り入れることに留
意し,注記してその違いが分かるようにした。
1
適用範囲
この規格は,通常の市街地交通状況で二輪自動車から発生する騒音の工学的測定方法について規定する。
この規格は,市街地の通常走行時に主要騒音源から発生する騒音レベルを再現することを意図している。
測定方法は,車両の運転条件で発生する音の再現性に矛盾のない範囲で,簡便性の要求が満たされるよ
うに規定している。
この試験方法は,広い空間で得られる音響環境を必要とする。このような条件は,通常,次の場合に用
いる。
− 車両の型式認証試験
− 製造段階での測定
− 公式試験場での測定
注記1 この試験方法によって得られた結果は,規定の試験条件で発生する騒音の客観的な測定値と
なる。ただし,二輪自動車のうるささについての主観的評価は,騒音測定装置の指示値と単
純に関連付けられるわけではないという事実を考慮する必要がある。うるささは,個人の感
覚,生理的身体条件,文化及び環境条件に強く関係しているので,ばらつきが大きく,特定
の車両条件を示すパラメータとして有効ではない。
注記2 任意に車両を選択する抜取検査が,理想的な音響環境の下で実施されることはまれであるこ
とに注意するのがよい。この規格に規定する要求事項を満たさない音響環境の道路で測定を
2
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
実施しなくてはならない場合,得られた結果は,規定された条件の下で得られる結果から多
少の偏差があることを承知しておいたほうがよい。
注記3 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 362-2:2009,Measurement of noise emitted by accelerating road vehicles−Engineering method
−Part 2: L category
ISO 9645:1990,Acoustics−Measurement of noise emitted by two-wheeled mopeds in motion−
Engineering method(全体評価:MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 1509-1 電気音響−サウンドレベルメータ(騒音計)−第1部:仕様
注記 対応国際規格:IEC 61672-1,Electroacoustics−Sound level meters−Part 1: Specifications(IDT)
JIS C 1515 電気音響−音響校正器
注記 対応国際規格:IEC 60942,Electroacoustics−Sound calibrators(IDT)
JIS D 0109 二輪自動車−用語
JIS D 1000 二輪自動車−エンジンネット出力試験方法
注記 対応国際規格:ISO 4106,Motorcycles−Engine test code−Net power(MOD)
JIS D 1037 二輪自動車−最高速度試験方法
注記 対応国際規格:ISO 7117,Motorcycles−Measurement method for determining maximum speed
(IDT)
JIS D 8301 自動車及びタイヤの車外騒音測定のための試験用路面
注記 対応国際規格:ISO 10844,Acoustics−Specification of test tracks for measuring noise emitted by
road vehicles and their tyres(IDT)
JIS Z 8402(規格群) 測定方法及び測定結果の精確さ(真度及び精度)
注記 対応国際規格:ISO 5725 (all parts),Accuracy (trueness and precision) of measurement methods and
results(IDT)
ISO/IEC Guide 98-3:2008,Uncertainty of measurement−Part 3: Guide to the expression of uncertainty in
measurement (GUM:1995)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS D 0109によるほか,次による。
3.1
車両質量
3.1.1
空車質量,mkerb(kerb mass)
通常運転に必要な全装備品を取り付けられた車両の完成出荷状態に,次の質量を加えた質量。
− 潤滑油,冷却液(必要な場合)及び洗浄剤。
3
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 燃料(製造業者が指定する容量の少なくとも90 %以上タンクに満たす)。
− 車両の基本構成部品に含まれるその他の装備。例えば,スペアホイール,車輪止め,消火器,スペア
パーツ,車載工具など。
3.1.2
試験時質量,mt(test mass)
車両の試験時質量で,運転者質量を含む。
注記 カテゴリL1において国連欧州経済委員会規則No.63(以下,UN R63-01という。)の場合,運
転者質量+車載する機器の質量は,90 kg以下70 kg以上である。
3.1.3
運転者質量,md(driver mass)
運転者の公称質量。
3.2
出力質量比指数,PMR(power-to-mass ratio index)
式(1)によって加速度を計算するために使用する無次元量。
000
1
PMR
t
n×
=mP
······································································· (1)
ここに,
Pn: JIS D 1000に規定する定格エンジン出力(kW)
mt: 試験時質量の数値(kg)
3.3
定格エンジン回転速度,S(rated engine speed)
製造業者が規定する定格最大出力時のエンジン回転速度。
なお,複数のエンジン回転速度で定格最大出力に達する場合には,その中で最大のエンジン回転速度と
する。
3.4
車両カテゴリ
3.4.1
カテゴリL(category L)
3.4.1.1
カテゴリL1及びL2(category L1 and L2)
L1:エンジン排気量が50 cm3以下又は電気モータの場合には,最大連続定格出力が4 kW以下であり,
最大車速が50 km/h以下の二輪自動車。
L2:スパーク点火タイプのエンジン排気量が50 cm3以下若しくは,その他の内燃エンジンの場合の最大
正味出力が4 kW以下又は電気モータの場合は,最大連続定格出力が4 kW以下であり,最大車速が
50 km/h以下の三輪自動車。
3.4.1.2
カテゴリL3(category L3)
エンジン排気量が50 cm3を超える二輪自動車又は最大車速が50 km/hを超える二輪自動車。
3.4.1.3
カテゴリL4(category L4)
エンジン排気量が50 cm3を超える三輪自動車又は最大車速が50 km/hを超える三輪自動車で,車輪が車
の縦軸に対し非対称に取り付けられている車両。
4
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.4.1.4
カテゴリL5(category L5)
エンジン排気量が50 cm3を超える三輪自動車又は最大車速が50 km/hを超える三輪自動車で,定格総車
両質量が1 000 kg以下で,車輪が車の縦軸に対し対称に取り付けられている車両。
3.5
基準点(reference point)
車両の前端。
3.6
目標加速度,aurban(target acceleration)
統計調査から導き出される市街地交通のパーシャルスロットル条件における加速度。
3.7
参照加速度,awot ref(reference acceleration)
試験路上における加速走行試験のために要求される加速度。
3.8
変速比重み付け係数,k(gear ratio weighting factor)
加速走行試験及び定常走行試験に関して二つの変速比の試験結果を組み合わせるために使用する無次元
量。
3.9
部分加速係数,kP(partial power factor)
加速走行試験及び定常走行試験の試験結果に重み付けし組み合わせるための無次元量。
3.10
予備加速(pre-acceleration)
試験区間で安定した加速度を達成するために,試験開始位置より前でスロットルを全開にする加速。
注記 詳しい関係は,図1参照。
3.11
固定変速比(locked gear ratio)
変速機の変速比が試験中に変化しないような変速機の制御。
3.12
エンジン(engine)
附属品を取り外すことができない動力源。
3.13
後半試験路長さ,l10(test track length)
マイクロホン間位置から試験終了位置までの加速度の計算に使用する試験路の長さ。
3.14
全試験路長さ,l20(test track length)
試験開始位置から試験終了位置までの加速度の計算に使用する試験路の長さ。
4
記号及び単位
この規格で用いられている記号及び単位,並びにそれらが最初に使われた細分箇条を,表1に示す。
5
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
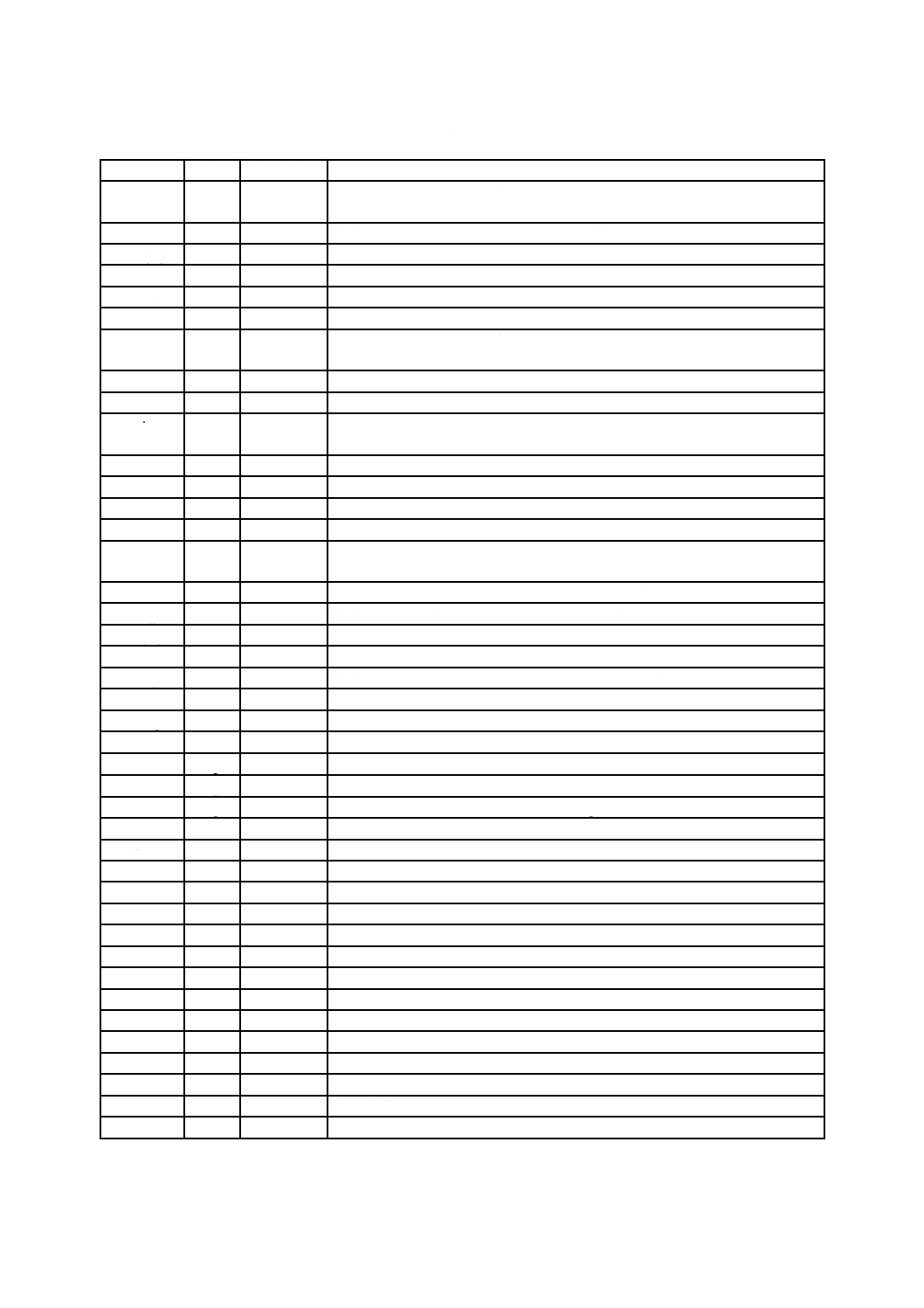
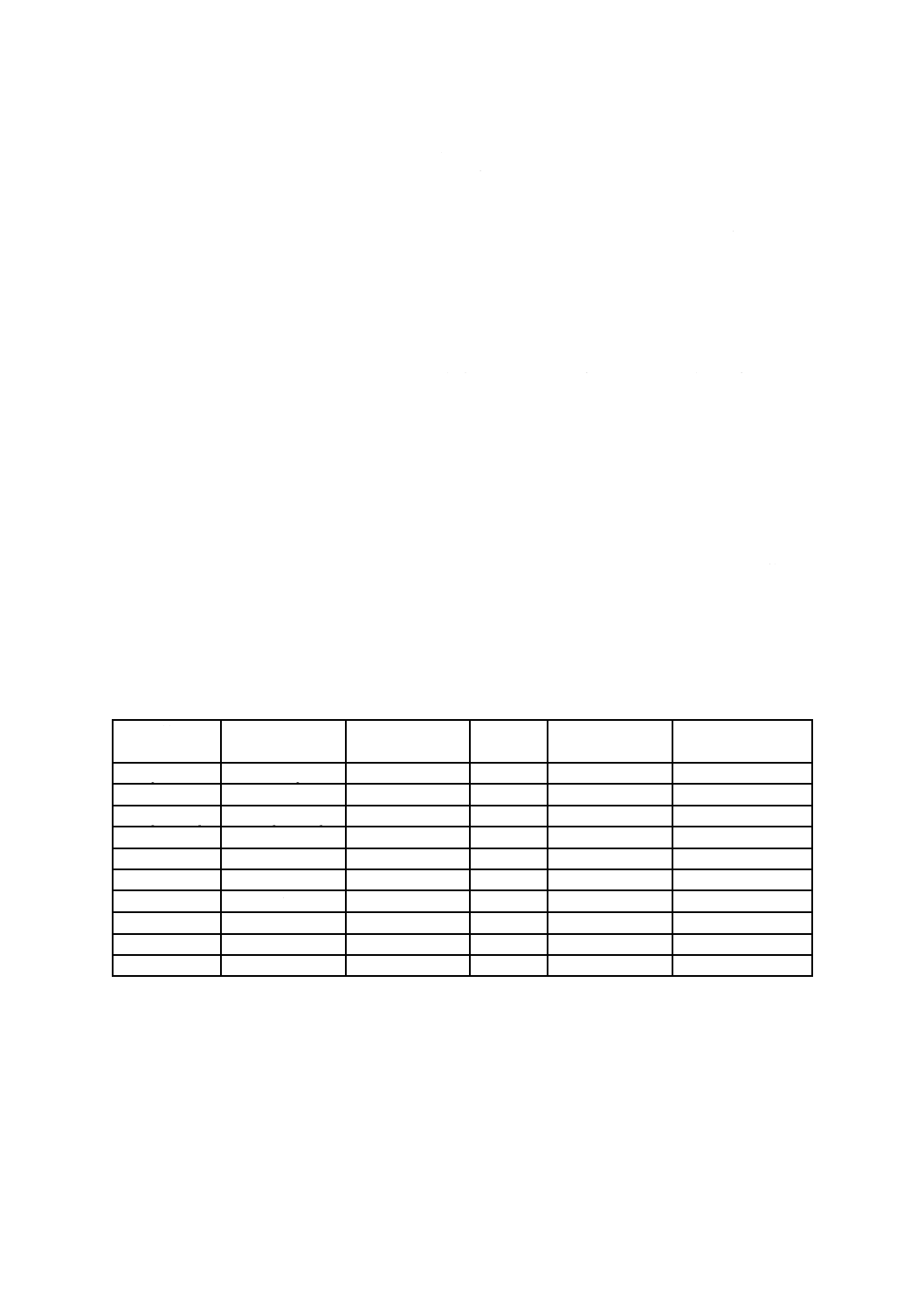
表1−記号及び対応する細分箇条
記号
単位
細分箇条
説明
AA'
−
6.1
車両の進行方向に直角の線で,試験中に騒音レベルを記録する試験路の開始
位置
awot i
m/s2
7.1
変速段iにおけるスロットル全開での加速度
awot (i+1)
m/s2
7.1
変速段(i+1)におけるスロットル全開での加速度
awot test
m/s2
7.1
単一変速段試験の場合のスロットル全開での加速度
awot ref
m/s2
3.7
スロットル全開試験のための参照加速度
aurban
m/s2
3.6
市街地走行時の加速度に相当する目標加速度
BB'
−
6.1
車両の進行方向に直角の線で,試験中に音圧レベルを記録する試験路の終了
位置
CC'
−
6.1
JIS D 8301に規定する試験路面を通る車両走行線
δ1〜δ7
dB
A.2
不確かさを考慮に入れるための入力量
j
−
6.3
一連の加速又は定常走行試験の各々の試験走行回数に対する1回目,2回目…
の数
kP
−
3.9
部分加速係数
k
−
3.8
変速比重み付け係数
lref
m
7.1
基準長
lveh
m
7.1
車長
l10
m
3.13
マイクロホン間位置から試験終了位置までの加速度を計算に使用する試験路
の長さ
l20
m
3.14
試験開始位置から試験終了位置までの加速度を計算に使用する試験路の長さ
Lcrs(i)
dB
8.4.3.2
変速段iでの定常走行試験における車両の騒音レベル
Lcrs(i+1)
dB
8.4.3.2
変速段(i+1)での定常走行試験における車両の騒音レベル
Lcrs rep
dB
8.4.3.2
定常走行試験における車両の騒音レベル報告値
Lwot (i)
dB
8.4.3.2
変速段iでのスロットル全開試験における車両の騒音レベル
Lwot (i+1)
dB
8.4.3.2
変速段(i+1)でのスロットル全開試験における車両の騒音レベル
Lwot rep
dB
8.4.3.2
スロットル全開試験での車両の音圧レベル報告値
Lurban
dB
8.4.2
市街地運転に相当する車両の音圧レベル報告値
md
kg
3.1.3
運転者質量
mkerb
kg
3.2.2
車両の空車質量
mref
kg
8.2.2
空車質量+運転者質量相当の(75±5)kg
mt
kg
3.1.2
車両の試験質量
nPP'
1/min
9
車両の前端がマイクロホン間位置を通過するときの車両のエンジン回転速度
nBB'
1/min
9
車両の後端が試験終了位置を通過するときの車両のエンジン回転速度
PMR
−
3.2
計算のために使用する出力質量比指数
Pn
kW
3.2
定格エンジン出力
PP'
−
6.1
車両の進行方向に直角の線で,マイクロホンの位置を示すもの
S
1/min
3.3
定格エンジン回転速度,単位は1/min,最大出力でのエンジン回転速度と同義
vAA'
km/h
5.2
車両の前端が試験開始位置を通過するときの車速
vBB'
km/h
5.2
車両の後端が試験終了位置を通過するときの車速
vmax
km/h
8.3.1.2
JIS D 1037に規定する最大車速
vPP'
km/h
5.2
車両の前端がマイクロホン間位置を通過するときの車速
vtest
km/h
8.3.1.2
目標試験車速
MT
−
附属書C
手動変速機
AT
−
附属書C
自動変速機
CVT
−
附属書C
無段変速機
6
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5
測定装置
5.1
音響測定装置
5.1.1
一般
音圧レベルの測定に用いる装置は,製造業者の推奨するウィンドスクリーンを使用する場合を含め,JIS
C 1509-1のクラス1の要求事項に適合するサウンドレベルメータ(騒音計)又は等価の測定装置でなけれ
ばならない。
測定装置全体は,JIS C 1515のクラス1の要求事項に適合する音響校正器によって校正する。
測定は,JIS C 1509-1に規定される音響測定装置の時間重み付け特性“F”及び周波数重み付け特性“A”
を用いて行う。A特性時間重み付きサウンドレベル(騒音レベル)を周期的にモニタリングする測定装置
を使う場合,30 ms以下のサンプリング間隔で読み取る。
測定装置は,製造業者の指示に従って保守され,校正されなければならない。
5.1.2
校正
一連の測定ごとに,測定の初めと終わりに,5.1.1に記載した音響校正器によって騒音測定装置全体を校
正する。調整なしでの校正の読み値の差は,0.5 dB以内でなければならない。この値を超えた場合には,
前回の満足した校正の後に得られた測定結果は無効とする。
5.1.3
検定
JIS C 1515の要求事項に従う音響校正器は,1年に一度検定する。
JIS C 1509-1の要求事項に従う測定装置は,少なくとも2年ごとに検定する。
全ての検定試験は,公認された試験機関によって,適切な基準に基づいた校正を行う。
5.2
エンジン回転速度及び速度測定装置
エンジン回転速度は,少なくとも±2 %の精度を満たす装置で測定する。
連続測定装置を用いる場合,車速は少なくとも±0.5 km/hの精度を満たす装置で測定する。
独立した速度測定装置によって試験を行う場合,速度測定装置は少なくとも±0.2 km/hの精度を満たさ
なければならない。
注記 独立した速度測定装置とは,vAA',vBB'及びvPP'の値を二つ以上の別々の装置で測定する場合のこ
とである。連続測定装置は,必要な速度情報を全て一つの装置で測定する。
5.3
気象条件観測装置
試験中の環境条件の監視に使用する気象条件観測装置は,次の許容値を満たさなければならない。
− 温度測定装置は,±1 ℃
− 風速測定装置は,±1.0 m/s
− 気圧測定装置は,±5 hPa
− 相対湿度測定装置は,±5 %
6
音響環境,気象条件及び暗騒音
6.1
試験場
試験路の中心から周囲半径50 m以内の空間に,フェンス,岩,橋又は建物のような大きな反射物があ
ってはならない。試験路の表面は乾燥し,粉雪又は石くずのような吸音性物質があってはならない。
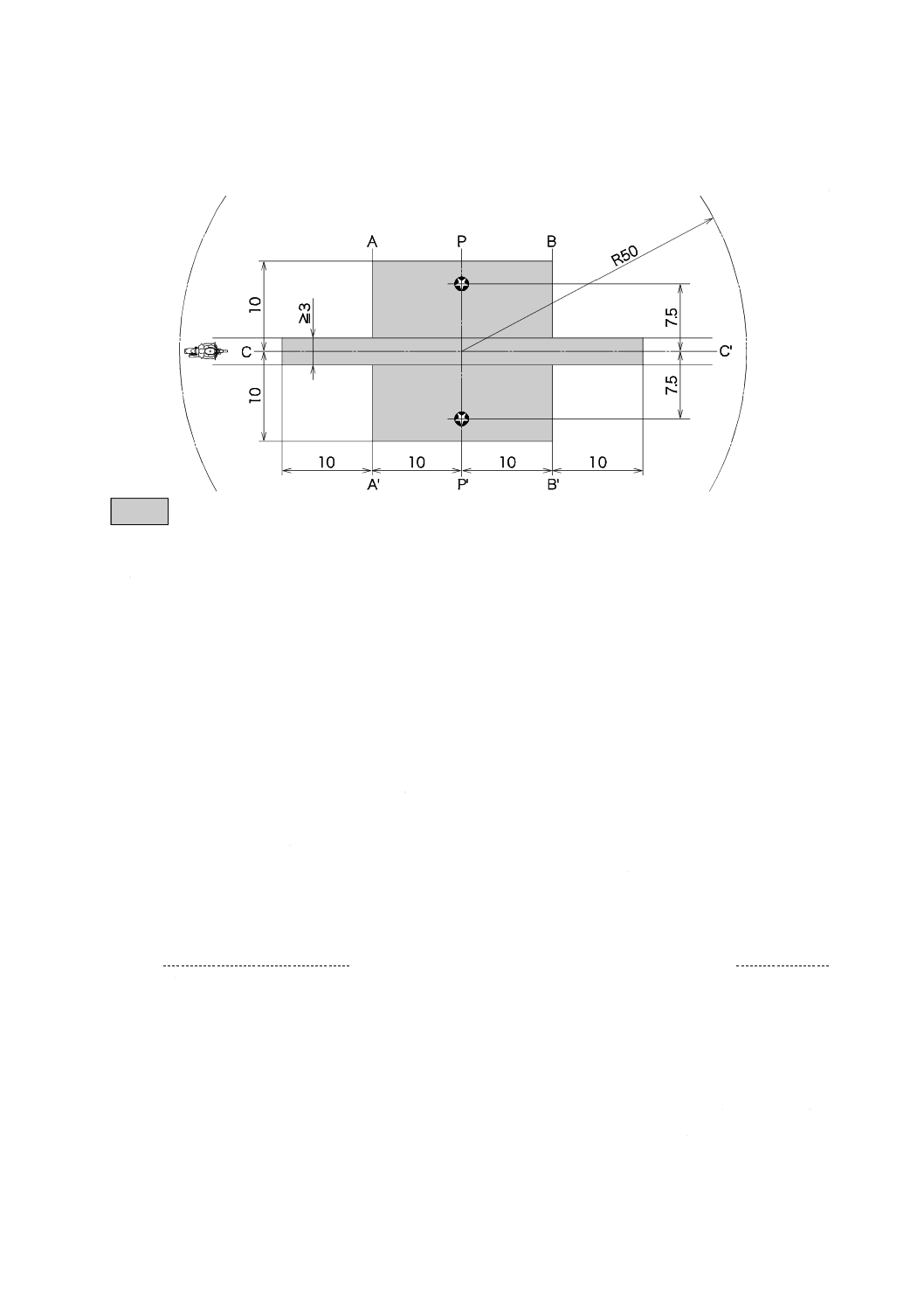
試験路の配置を,図1に示す。マイクロホンの付近には音場に影響する物体がなく,マイクロホンと音
源との間には人がいてはならない。メータを読む人は,読み値に影響しない位置にいなければならない。
注記 半径50 m外の建物でもその反射音が試験路に集中する場合には,重大な影響を及ぼすおそれが
7
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ある。
単位 m
試験路面の最小領域,すなわち,試験領域
∝
マイクロホン位置(高さ1.2 m)
AA'
試験区間の開始線
BB'
試験区間の終了線
CC'
試験区間を通過する車両走行線
PP'
マイクロホン位置の間を通過する車両と直角の線
R50
試験路の中心から半径50 m
注記 スマッジング部分(試験領域)は,JIS D 8301に適合した表面で舗装された最小の領域である。
図1−試験路の寸法
6.2
気象条件
気象条件観測装置は,試験路を代表するデータを収集するものとし,マイクロホンの高さで,試験領域
に隣接して設置する。
測定は,周囲の気温が5 ℃〜40 ℃の範囲内1)で行う。
騒音測定中に,突風を含み,風速がマイクロホン高さで5 m/sを超える場合には,試験を行わない。
気温,風速及び風向き,相対湿度並びに気圧の代表値を騒音測定中に記録する。
注記 気温及びその他の要因の影響については附属書Aを参照する。
注1) UN R41-04では5 ℃〜45 ℃の範囲であるが,この規格ではISO 362-2と同様に5 ℃〜40 ℃の
範囲とする。
6.3
暗騒音
車両の一般的な騒音レベルの特性と無関係なピークは,測定値を読み取るときに無視する。
暗騒音は,一連の車両試験の直前及び直後に10秒間測定する。この測定は,車両試験と同じマイクロホ
ンを使って,同じ位置で行う。音圧レベルの最大値を報告する。
暗騒音(風音も含む。)は,試験中の車両から発生する騒音レベルより少なくとも10 dB低くなければな
らない。暗騒音レベルと測定された音圧レベルとの差が10 dB〜15 dBの間である場合には,j番目の試験
結果を計算するために,騒音計の読み値から表2に示す適切な補正値を差し引く。
8
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−個々の測定値に適用する補正値
単位 dB
暗騒音レベルと測定された音圧レ
ベルとの差
10
11
12
13
14
15以上
補正値
0.5
0.4
0.3
0.2
0.1
0.0
7
カテゴリL3の車両(PMR > 25の場合)の加速度の規定
7.1
一般
加速度は全て,試験路上での複数の車速を使って計算する。7.2に示す式を使って,awot i,awot (i+1)及び
awot testを計算する。車両の基準点がAA'又はPP'を通過するときの車速をAA'での車速(vAA')又はPP'での
車速(vPP')と定義する。車両の後端がBB'を通過するときの車速をBB'での車速(vBB')と定義する。加速
度の決定に使用した方法を試験報告書に記載しなければならない。
車両の前端を基準点とすると,lrefは車長lvehと同じである。
加速度の計算には,試験路の寸法を使用する。これらの寸法は,次のとおりである。
l20=20 m,l10 =10 m
多様な技術があるので,様々な計算方法を考慮する必要がある。例えば,無段変速機でも電子制御によ
って変速比を固定できるものもあり,幾つかの適用可能な加速度計算方法を使って,これらの要求に対応
する。
7.2
加速度の計算
7.2.1
変速比を固定できる変速機を搭載した車両の計算手順
変速段の選択に使用するawot testの値は,有効な試験走行の三つ2)のawot test, jの平均値とする[式(2)参照]。
(
)(
)
(
)
ref
20
2
AA',
2
BB',
test,
wot
2
3.6
/
3.6
/
l
l
v
v
a
j
j
j
+
−
=
················································ (2)
予備加速を用いてもよい。
注2) ISO 362-2では四つの平均値を使用するが,この規格ではUN R41-04と同様に三つの平均値を
使用する。
7.2.2
変速比を固定できない変速機を搭載した車両の計算手順
変速段の選択に使用するawot testの値は,有効な試験走行の三つ2)のawot test, jの平均値とする。
試験の要件を達成するために,8.3.1.3.3に規定する装置又は措置によって変速機の作動を制御できる場
合には,式(2)によってawot test, jを計算する。
予備加速を用いてはならない3)。
注3) ISO 362-2では予備加速を用いてもよいが,この規格ではUN R41-04と同様に予備加速を用い
てはならない。
8.3.1.3.3に規定する装置又は措置を用いない場合には,式(3)によってawot test, jを計算する。
(
)(
)
(
)
ref
10
2
,
pp'
2
,
BB'
test,
wot
2
3.6
/
/3.6
l
l
v
v
a
j
j
j
+
−
=
·················································· (3)
予備加速を用いてはならない。
注記 この種類の車両では,この規格の将来的な改正に備えた情報を提供するために,AA',PP'及び
BB'における車速を記録することが有益である。
7.3
目標加速度の計算
9
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式(4)又は式(5)によって,aurbanを計算する。
(
)1.08
PMR
log
1.37
urban
−
=
a
:25<PMR ≦ 50の場合························· (4)
(
)
19
1.
PMR
log
1.28
urban
−
=
a
:PMR>50の場合 ································· (5)
7.4
参照加速度の計算
式(6)又は式(7)によって,awot refを計算する。
(
)2.52
PMR
log
2.47
ref
wot
−
=
a
:25<PMR ≦ 50の場合 ······················· (6)
(
)4.16
PMR
log
3.33
ref
wot
−
=
a
:PMR>50の場合 ······························ (7)
注記 特定の車両に対するawot ref及びaurbanの計算は,実走行データの統計的解析に基づいている。そ
のため,物理的にPMRから加速度を計算したものではない。
7.5
部分加速係数 kP
部分加速係数kPは式(8)のとおり。
test
wot
urban
P
1aa
k
−
=
·········································································· (8)
単一変速段による試験以外の場合には,8.4.3.1に規定するawot testの代わりにawot refを使用する。
8
試験手順
8.1
マイクロホンの位置
PP'上のマイクロホン位置から試験路上の基準線CC'までの距離(図1参照)は,7.5 m±0.05 mとする。
マイクロホンは地面から1.2 m±0.02 mの高さに配置する。自由音場条件の基準方向(JIS C 1509-1)は
水平で,かつ,車両の走行線CC'に直角に向かう。
8.2
車両の条件
8.2.1
一般条件
車両は,車両製造業者が指定するとおりに準備する。
測定を開始する前に,車両を通常の運転条件にする。
走行間に約1分間のニュートラルでアイドルの待機時間がある場合は,走行間の結果の変動を減らすこ
とができる。
8.2.2
車両の試験時質量
測定は,次に規定する試験時質量mt(単位kg)の車両で行う。
mt = mref = mkerb + (75±5) kg 4)
注4) (75±5) kgは運転者の質量mdに車載する機器の質量を加えたものに等しい。
8.2.3
タイヤの選定及び条件
タイヤは車両にとって適正であるものとし,かつ,車両の試験時質量に関して車両製造業者が推奨する
空気圧にする。
認証及び認証に関連する目的のためには,規則が規定するタイヤに関する追加要件が必要である。この
種の試験のためのタイヤは車両製造業者が選定するものとし,車両製造業者が当該車両に対して指定する
タイヤサイズ及びタイヤ型式のいずれかに一致する。このタイヤは車両と併せ市場で購入できるものとす
る。トレッドの最小深さはトレッドの全深さの少なくとも80 %とする5)。
注5) トレッドの深さ及びパターンは,試験結果にかなりの影響を及ぼす可能性がある。
8.3
運転条件
8.3.1
カテゴリL3の車両(PMR > 25の場合)
10
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.3.1.1
一般条件
AA'への進入から車両後端がBB'を通過するまで試験全体を通じて,車両の中心線の進路がCC'にできる
だけ沿って運転する(図1参照)。けん引車両から直ちに切り離せないトレーラは,BB'の通過時は考慮し
ない。車両の駆動軸が二つ以上ある場合には,通常の道路で使用されている駆動方式で試験する。車両が
補助手動変速機又は多段変速軸を装備している場合には,通常の市街地走行に使用する位置を用いる。ど
の場合にも,徐行,パーキング又はブレーキ用の変速段は除く。
8.3.1.2
試験車速
試験車速vtestは,次による。
40 km/h±1 km/h :PMR ≦ 50の場合
50 km/h±1 km/h :PMR > 50の場合
基準点(車両の先端)がPP'を通過するときに,試験車速に達する。出口車速vBB'がvmaxの75 %を超え
る場合には,試験車速をvPP'の10 %(4 km/h又は5 km/h)ずつ下げる。
8.3.1.3
変速比選択
8.3.1.3.1
一般
必要な加速度を達成するために適正な試験方法を決定することは,製造業者の責任である。
附属書Bに,試験の補助として,変速段選択基準及び試験走行基準をフローチャートの形で示す。
8.3.1.3.2
変速比を固定できる変速機の場合
試験用の変速比の選択は,7.2で明記したスロットル全開条件下で指定された加速度awot iと,7.4の式(6)
又は式(7)による加速走行試験に必要な参照加速度awot refとの関係によって決定される。
変速比の選択については,次の条件が可能である。
a) 参照加速度awot refの10 %の許容差範囲内の加速度を達成する変速段が二つある場合には,参照加速度
awot refに近い方の変速段を試験に使用する6)。
b) 参照加速度awot refの10 %の許容差範囲内の加速度を達成する変速段が一つだけある場合には,その変
速段で試験を行う。
c) 必要な加速度を達成する変速段がない場合には,参照加速度awot refより高い加速度の変速段iと,そ
れより低い加速度の変速段(i+1)を選び,両変速段を使って試験する。参照加速度awot refを基準とす
る変速比重み付け係数は,式(9)によって計算する。
1)
wot(
wot
1)
wot(
ref
wot
+
+
−
−
=
i
i
i
a
a
a
a
k
····································································· (9)
注6) ISO 362-2ではc)と同様に二つの変速段を使用するが,この規格ではUN R41-04と同様に一つ
の変速段を使用する。
車両の変速機に変速段が一つしかない場合には,その変速段でスロットル全開試験を行う。その場合に
は,awot refの代わりに,得られた加速度awot testを使って部分加速係数kPを計算する。
ある変速段で,車両がBB'を通過する前に定格エンジン回転速度Sを超える場合には,次に高い変速段
を用いる。
車両の変速機に変速段が二つ以上ある場合には,1速ギヤでは試験しない。awot refを満足する変速段が1
速ギヤだけの場合には,2速ギヤを使用する。
8.3.1.3.3
変速比を固定できない変速機の場合
全自動変速位置を使う。
加速度awot testは,7.2に定めた式(2)又は式(3)によって計算する。
11
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
その場合,試験には変速比を低くし加速度を高くするギヤチェンジを含めてもよい。変速比を高くし加
速度を低くするギヤチェンジは許されない。どの場合も,特定の市街地交通の条件では一般的には使用さ
れない変速段へのギヤチェンジは避ける。
したがって,特定の市街地走行試験条件では一般的には使用されない変速段へのダウンシフトを避ける
ために,代替ギヤの選択を含めて電子又は機械的装置を装備して使用することは許される。
そして,awot refの代わりに,得られた加速度awot testを使って部分加速係数kPを計算する。
8.3.1.4
加速走行試験
加速走行試験は,8.3.1.3によって当該車両について定めた全ての変速段で,8.3.1.2に定めた試験車速で
行う。
車両の前端がAA'に達すると,加速制御ユニットが完全に連動し,車両の後端がBB'に達するまで完全
に連動し続ける。その後,加速制御ユニットを解除する。加速がAA'を超えても遅れる場合には,予備加
速を使ってもよい。加速開始位置は報告する。
車速は,小数点以下1位まで記録しなければならない。
計算した加速度awot testは,小数点以下2位まで記録する。
注記 7.2に規定しているとおり,予備加速を用いることができるのは変速比を固定できる変速機を搭
載した車両だけである。
8.3.1.5
定常走行試験
8.3.1.3.2に規定する変速機をもつ車両の場合には,加速走行試験のために定めたのと同じ変速段で,定
常走行試験を行う。8.3.1.3.3に定めた変速機をもつ車両の場合には,フルオートマチック運転のためのギ
ヤセレクタ位置を使う。加速走行試験の場合に変速比を固定しているときは,定常走行試験の場合にも同
様に変速比を固定する。
定常走行試験中に,AA'とBB'との間で8.3.1.2に規定された車速を維持するように加速制御ユニットを
装備する。
8.3.2
カテゴリL3の車両(PMR ≦ 25の場合)
唯一の運転条件は,加速走行試験である。8.3.1.1に定めた一般条件を適用する。マイク前車速は8.3.1.2
に示すとおりである。出口車速vBB'がvmaxの75 %を超える場合又はエンジン回転速度がBB'で定格エンジ
ン回転速度Sを超える場合には,試験車速を10 %(4 km/h)ずつ下げる。選択する変速段は試験中に定格
エンジン回転速度Sを超えない最も低い変速段とする。最終試験条件は,BB'でvmaxの75 %と定格エンジ
ン回転速度Sを超えない,可能な限り最大の試験車速における可能な限り最も低い変速比によって決定す
る。
附属書Cに,試験の補助として,変速段選択基準及び試験走行基準をフローチャートの形で示す。
8.3.3
カテゴリL4及びL5の車両
8.3.3.1
一般
運転条件は加速走行試験だけとする。
附属書Dに,試験の補助として,変速段選択基準及び試験走行基準をフローチャートの形で示す。
8.3.3.2
自動変速機
8.3.3.2.1
進入車速
車両は次に示す低い方の車速で,AA'に一定速度で進入する。
− 50 km/h
− Sの75 %に等しいエンジン回転速度に相当する車速試験中に1速へのダウンシフトが起こる場合に
12
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,ダウンシフトを避けるため二輪自動車の車速を最大60 km/hまで上げることができる。
8.3.3.2.2
変速比選択
試験はマニュアルギヤセレクタを最高段にして行う。1速への自動ダウンシフトが起こる場合には,こ
れを除く。最高段から1段又は2段低い変速段への自動ダウンシフトが起こる場合には,ギヤセレクタを
最高段にして,試験中自動ダウンシフトが起こらないようにする。
電子式変速機の試験ができない場合には,市街地走行では通常使用しない変速段へのダウンシフトを避
けるプログラムを設定し使用する。
8.3.3.3
手動変速機
8.3.3.3.1
進入車速
車両は次に示す低い方の車速で,AA'に一定速度で進入する。
− 50 km/h
− Sの75 %に等しいエンジン回転速度に相当する車速
8.3.3.3.2
変速比選択
4速以下の変速段を備えた車両の試験は,2速で行う。BB'でのエンジン回転速度がSを超える場合,次
に高い変速段で試験を行う。
5速以上の変速段を備えた車両は,次の変速段で試験する。
− エンジン排気量が175 cm3以下のエンジンを搭載した車両は,3速だけで試験を行う。
− エンジン排気量が175 cm3を超えるエンジンを搭載した車両は,2速及び3速で試験する。
− BB'でのエンジン回転速度がSを超える場合,3速だけで試験を行う。
注記 国連欧州経済委員会規則No.9(以下,UN R9という。)では3速で試験を行う。
8.3.3.4
その他の自動変速機
マニュアルギヤセレクタを備えていない車両では,30 km/h,40 km/h及び50 km/h又はvmaxの75 %のい
ずれか低い方でAA'に進入する。
8.3.4
カテゴリL1及びL2の車両(最大車速 ≦ 30 km/hの場合)
8.3.4.1
一般
AA'への進入から車両後端がBB'を通過するまで試験全体を通じて,車両の中心線の進路がCC'にできる
だけ近く沿って運転する(図1参照)。
AA'に進入し,AA'〜BB'の間をその最大車速で一定で通過する。
附属書JBに,試験の補助として,変速段選択基準及び試験走行基準をフローチャートの形で示す。
8.3.4.2
変速比選択
8.3.4.2.1
自動変速機
最大車速に達する車両製造業者推奨のセレクタ位置で試験を行う。
8.3.4.2.2
手動変速機
最も高い変速段で試験を行う。
8.3.5
カテゴリL1及びL2の車両(最大車速 > 30 km/hの場合)
8.3.5.1
一般
運転条件は加速走行試験だけとする。
進入車速は30 km/hでAA'に一定速で進入する。
附属書JCに,試験の補助として,変速段選択基準及び試験走行基準をフローチャートの形で示す。
8.3.5.2
変速比選択
13
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.3.5.2.1
自動変速機
最大車速に達する車両製造業者推奨のセレクタ位置で試験を行う。
8.3.5.2.2
手動変速機
Sの50 %以上のエンジン回転速度でAA'を通過できる最も高い変速段で試験を行う。
8.4
測定読取値及び報告値
8.4.1
一般
全ての試験条件について少なくとも3回7)の測定を,車両の両側で,各変速段ごとに行う。
車両がAA'とBB'との間(図1)を通過する度にその間に表示される最大A補正騒音レベルを,四捨五
入して小数点以下1位8)まで記録する。明らかに一般的な騒音レベルから外れた騒音ピークが観測された
場合には,その測定値は廃棄する。
どの試験条件でも,無効結果の削除を考慮に入れて,2.0 dB以内の,j番目の有効連続測定結果の最初の
三つを使って,該当する中間又は最終結果を計算する。
vAA',vBB'及びvPP'の測定値は,四捨五入して小数点以下1位まで記録する。
注7) ISO 362-2では4回,UN R9及びUN R63-01では2回測定するが,この規格では3回測定する。
注8) ISO 9645:1990では0.5 dBごとに記録する。
8.4.2
データの編集
一定の試験条件について,車両の両側の結果を別々に平均する。二つの平均値の高い方を四捨五入して
小数点以下1位まで計算したものを中間結果とする。
Lurbanは,加速騒音と定常騒音それぞれ左右の高い方(中間結果)を用いて計算を行う。
8.4.3
カテゴリL3の車両(PMR > 25の場合)
8.4.3.1
加速度
ここで使用される加速度は,式(10)に表す3回9)の走行の平均加速度である。
3
)
wot test(3
)
wot test(2
)
wot test(1
wot test
a
a
a
a
+
+
=
·············································· (10)
ただし,括弧内の数は試験走行jを示す。
注9) ISO 362-2では四つの平均値を使用するが,この規格ではUN R41-04と同様に三つの平均値を
使用する。
8.4.3.2
報告値及び最終結果
式(11)によって加速走行試験の報告値Lwot repを計算する。
Lwot rep = Lwot (i+1) + k [Lwot(i)−Lwot (i+1)] ···············································(11)
ここに,
k: 変速比重み付け係数
式(12)によって定常走行試験の報告値Lcrs repを計算する。
Lcrs rep = Lcrs (i+1) + k [Lcrs (i)−Lcrs (i+1)] ················································ (12)
単一ギヤ試験の場合には,報告値は試験結果から直接導き出す。
部分加速係数kPを決定するのに使用する式は,次のとおり。
− 単一ギヤ試験以外の場合には,kPは式(13)によって計算する。
ref
wot
urban
P
1aa
k
−
=
········································································· (13)
− 単一ギヤ試験の場合には,kPは式(14)によって求める。
14
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
test
wot
urban
P
1aa
k
−
=
········································································ (14)
− awot testがaurbanを下回る場合には
kP = 0 ···················································································· (15)
最終結果は,Lwot repの式(11)とLcrs repの式(12)とを用いて式(16)で計算する。
Lurban = Lwot rep−kP (Lwot rep−Lcrs rep) ················································· (16)
8.4.4
カテゴリL3の車両(PMR ≦ 25の場合)
8.4.2の中間結果が最終結果になる。
8.4.5
カテゴリL4及びL5の車両
最終結果は次による10)。
a) 単一ギヤで試験した車両の場合,8.4.2の中間結果。
b) 二つの変速段で試験した車両の場合,各変速段に対する中間結果の算術平均。
c) 複数の車速で試験した車両の場合,中間結果の最大値。
注10) UN R9では各変速段で左右2回ずつの測定値のうちの最大値を最終結果とする。
8.4.6
カテゴリL1及びL2の車両
8.4.2の中間結果が最終結果になる11)。
注11) UN R63-01では左右2回ずつの測定値の平均値。
8.5
測定の不確かさ
8.4に記載した測定手順は,複数のパラメータ(例えば,JIS D 8301の路面テクスチャの変動,環境条件,
測定機器の不確かさなど)の影響を受け,同一の対象で観察した音圧レベルにばらつきが生じる。このば
らつきの原因や特性は完全には分かっておらず,場合によっては予期できない形で最終結果に影響を及ぼ
すことがある。この規格による測定結果の不確かさは,ISO/IEC Guide 98-3に記載した手順又はJIS Z 8402
(規格群)に従って試験機関間で行った比較によって評価できる。利用できる複数の試験機関からのデー
タ及び同一の試験機関内のデータがまだ多くないため,ISO/IEC Guide 98-3に記載する手順によってこの
規格に関する不確かさを推定した。次に記載する不確かさは,既存の統計データ,この規格に述べる公差
の解析,及び工学的判断によるものである。このように決定した不確かさを次のとおり分類した。
a) 同一の試験機関内で予測されるばらつき及び一連の単一試験中の環境条件の僅かなばらつき(走行ご
と)。
b) 同一の試験機関内で予測されるばらつき。ただし,年間を通して通常予測できる環境条件及び装置特
性のばらつきを含む(日ごと)。
c) 環境条件のほか,装置,作業員及び路面状態も異なる試験機関間のばらつき(試験場ごと)。
報告する場合には,ISO/IEC Guide 98-3に定義されるとおり,包含確率に加えて拡張不確かさも記
載する。拡張不確かさの決定に関する情報は,附属書A12)に記載される。
注12) 附属書AにISO/IEC Guide 98-3に従った解析の枠組みを示す。これはこの規格に対する測定の
不確かさに関する将来の研究に利用できる。
表3のデータは,カテゴリL車両の真の測定値を80 %の確率で網羅できるばらつき量である。
このデータに製品のばらつきは含まれない。
15
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
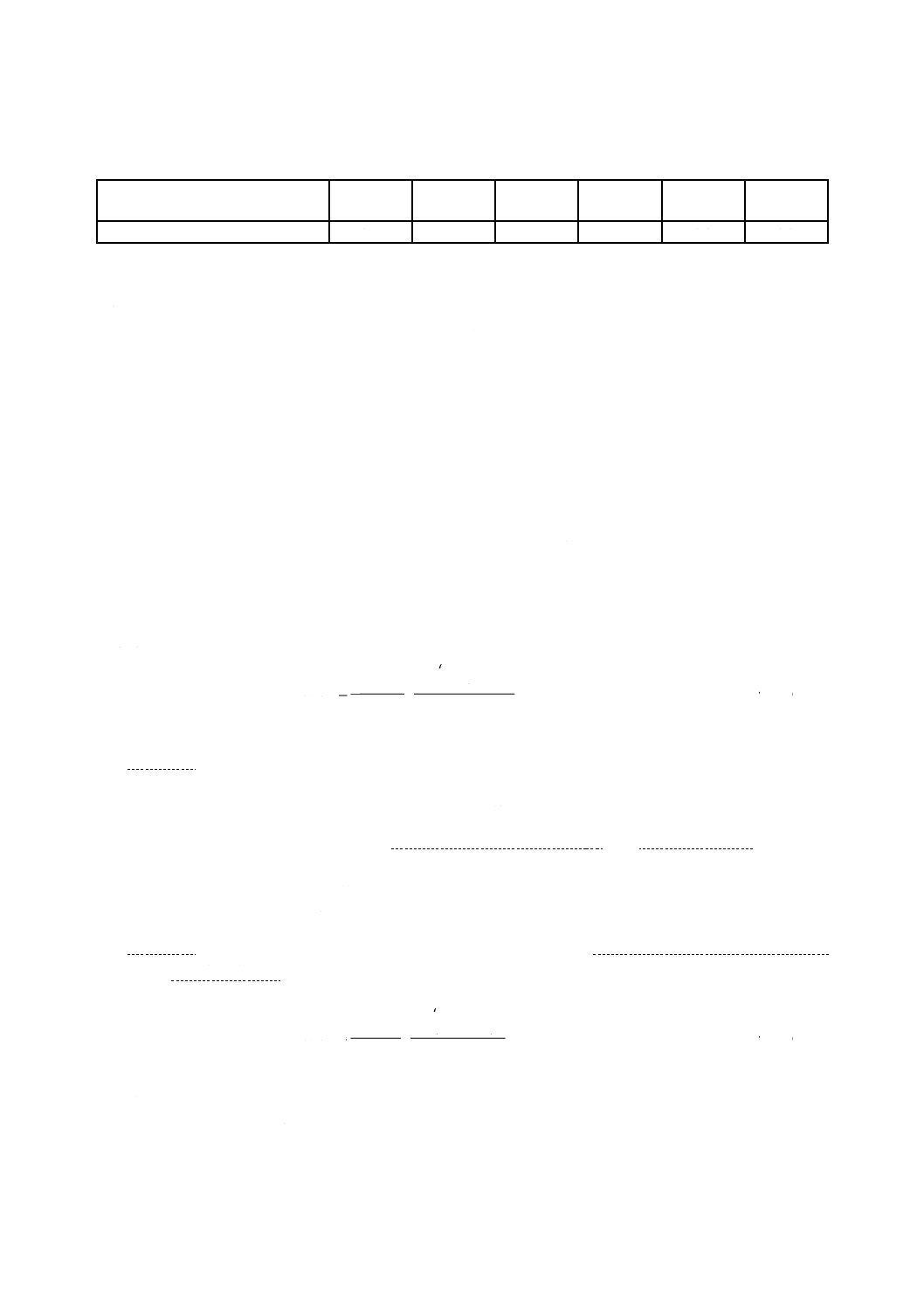
表3−80 %の確率で真値を網羅できる測定結果のばらつき
単位 dB
走行ごと
日ごと
試験場ごと
0.5
0.9
1.4
具体的な情報が得られるまでは,試験場間での確率80 %のばらつきデータを試験報告書に記載する場合
がある。
9
試験報告書
試験報告書には,次の情報を記載する。
a) この規格の規格番号(JIS D 1024-2)。
b) 試験場の詳細,試験路の向き,風速,気温,風向,気圧,湿度などの気象条件。
c) 測定機器の型式,ウィンドスクリーンも含む。
d) 暗騒音レベル(A特性)。
e) 車両,エンジン及びトランスミッションシステムの識別情報。使用できる変速比,タイヤのサイズ及
び型式,タイヤ空気圧,定格エンジン出力,定格エンジン回転速度,最大車速,試験時質量,出力質
量比指数,車長など。
f)
試験に使用した変速段又は変速比。
g) 加速開始時の車速,エンジン回転速度及び加速開始位置。
h) PP'及び加速終了時の車速(vPP',v BB')及びエンジン回転速度(n PP',n BB')。
i)
使用した加速度計算法。
j)
適切な場合,車両の補助装置及び運転条件。
k) 各試験で測定した全ての有効なA特性時間重み付きサウンドレベル(車両の測定した側及び試験時の
走行方向別に記載する)。
16
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
測定の不確かさ
ISO/IEC Guide 98-3(GUM)による解析の枠組み
A.1 一般
測定手順は,同一対象について観測された結果のばらつきにつながる複数の変動要因の影響を受ける。
このばらつきの原因及び特性は,完全には分かっておらず,予測できない形で最終結果に影響を及ぼす
ことがある。一般的に測定方法に関する不確かさの表現として承認された形式は,ISO/IEC Guide 98-3に
記載されている。この形式は不確かさ集を構成し,その中で全ての多様な不確かさの原因が識別され,定
量化されている。そして,そこから合成標準不確かさを得ることができる。不確かさは,次の要因に起因
する。
− サウンドレベルメータ,音響校正器,速度測定装置などの測定機器のばらつき
− Lurban測定時に音の伝ぱに影響を及ぼす局所的環境条件のばらつき
− 通過走行中の車速及び車両位置のばらつき
− 音源の特性に影響を及ぼす局所的環境条件のばらつき
− 主にエンジン性能など,出力特性に影響を及ぼす環境条件(大気圧,大気密度,湿度及び気温)の影
響
− 推進システムからの音に影響する環境条件(大気圧,大気密度,湿度及び気温)の影響,及びタイヤ
騒音(タイヤ及び路面の温度,湿った路面)の影響
− 試験場の特性(路面のきめ,吸音及び勾配)
8.5によって決定された不確かさは,この規格に関連した不確かさを表している。ここには,製造工程に
おけるばらつきに関連した不確かさは含まれていない。同一工程で製造された車両の市街地での騒音レベ
ルのばらつきは,この規格の適用範囲外である。
不確かさの影響は,次の原因から三つに分類してもよい(8.5参照)。
a) 走行ごとのばらつきによる不確かさは,連続走行での車両の動作状況の変化,気象条件の僅かな変化,
暗騒音レベルの僅かな変化及び計測システムの不確かさによる。
b) 日ごとのばらつきによる不確かさは,年間を通しての気象条件の変化,試験路面の経時変化,長期に
わたる計測システム性能の変化及び車両の動作状況の変化による。
c) 試験場ごとのばらつきによる不確かさは,異なる試験場,計測システム,試験路面特性及び車両の動
作状況による。
試験場ごとのばらつきは,a),b)及びc)に含まれる不確かさの原因からなる。日ごとのばらつきは,a)
及びb)に含まれる不確かさの原因からなる。
A.2 市街地走行時の車両の音圧レベルの計算式
市街地走行時の音圧レベルL urbanの一般的な計算式は,式(A.1)で与えられる。
L urban=L wot rep−kP (L wot rep−L crs rep)+δ1+δ2+δ3+δ4+δ5+δ6+δ7 ········· (A.1)
ここに,
Lwot rep: スロットル全開試験によるA特性時間重み付きサウン
17
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ドレベル
Lcrs rep: 定常走行試験によるA特性時間重み付きサウンドレベ
ル(該当する場合)
kP: 部分加速係数(該当する場合)
δ1: 計測システムの不確かさを考慮した入力量
δ2: 測定時に音源からの音の伝ぱに影響を及ぼす環境条件
の不確かさを考慮した入力量
δ3: 車速及び車両位置の不確かさを考慮した入力量
δ4: 音源の特性に影響を及ぼす局所的環境条件の不確かさ
を考慮した入力量
δ5: 動力装置の機械的特性に対する環境条件の影響の不確
かさを考慮した入力量
δ6: 推進システムからの音及びタイヤ・路面騒音に対する環
境条件の影響の不確かさを考慮した入力量
δ7: 主に路面特性に関係する試験場の特性の影響の不確か
さを考慮した入力量
注記1 不確かさを考慮するための式(A.1)に含まれる入力は,この規格の制定時点での情報から該当
すると考えられるものであり,今後の研究によってこれ以外のものが明らかになる可能性が
ある。
注記2 δ関数の推定値は,ある測定ではゼロになることも考えられるが,通常はプラス又はマイナ
スとなる(表A.1参照)。それらの不確かさは,測定結果を決定する目的のために加算するも
のではない。
A.3 不確かさの一覧
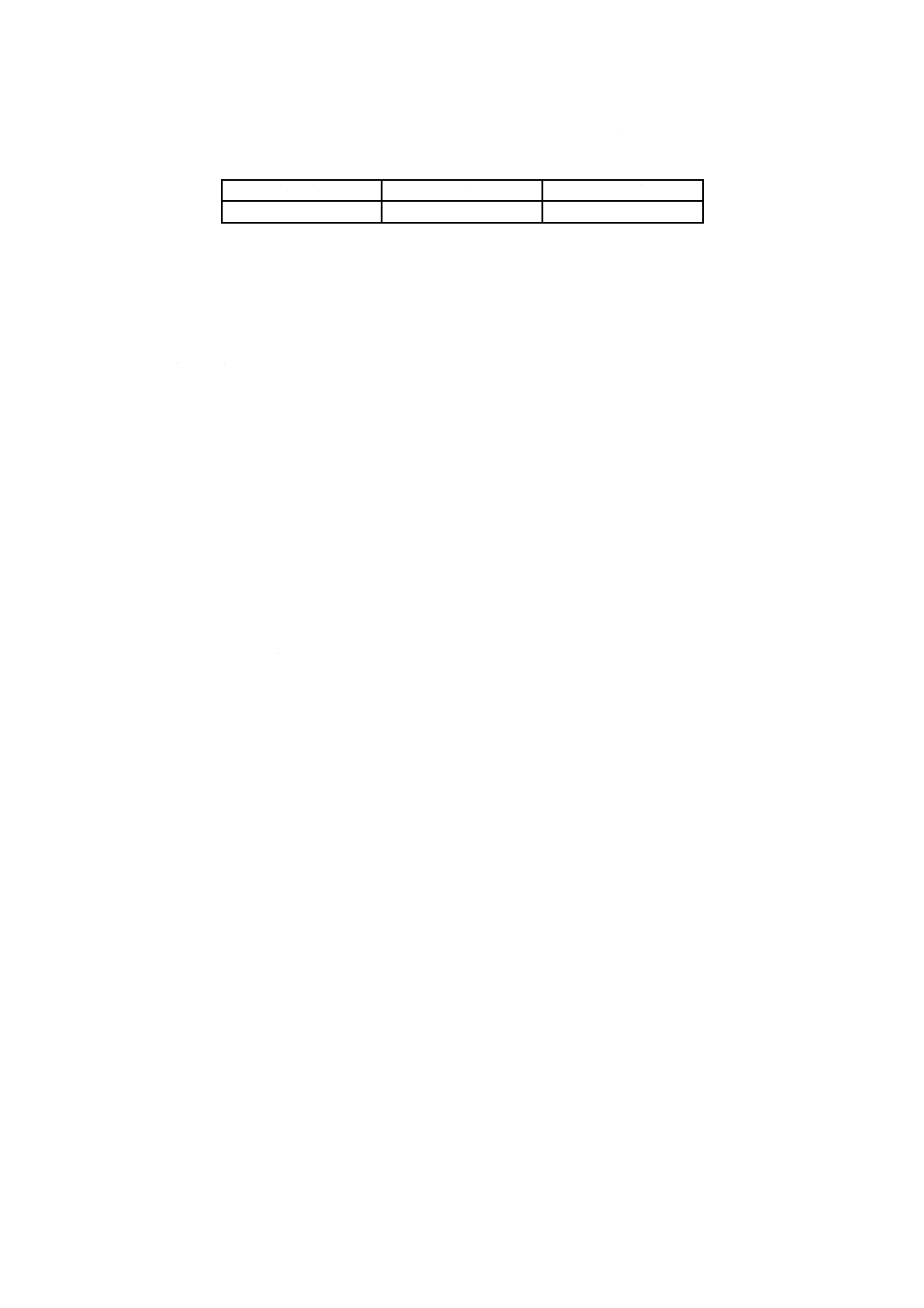
表A.1−市街地音圧レベルを決定するための不確かさの一覧
量
推定値
dB
標準不確かさui
dB
確率分布
感度係数ci
不確かさの寄与,uici
dB
Lwot rep
Lwot rep
1
kP
kP
Lwot rep−Lcrs rep
Lwot rep−Lcrs rep
Lwot rep−Lcrs rep
kP
δ1
0
1
δ2
0
1
δ3
0
1
δ4
0
1
δ5
0
1
δ6
0
1
δ7
0
1
様々な入力量に相関関係がある可能性を考慮し,各不確かさの寄与uiciから,ISO/IEC Guide 98-3の規
則に従い合成標準不確かさuを算出できる。
注記 記載されている不確かさの評価は,この規格の利用者に有益な情報を提供する枠組みを示す。
この情報は現時点の最新技術情報を示している。
式(A.1)の全項,及び項と項との間の全相互作用に関する不確かさの情報を提供するためには,
更に作業が必要である。
18
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4 測定の拡張不確かさ
拡張不確かさ“U”は,ISO/IEC Guide 98-3に記載されているとおり,合成標準不確かさ“u”に,選択
した包含確率に対応する適切な包含係数を乗じて算出される。
19
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
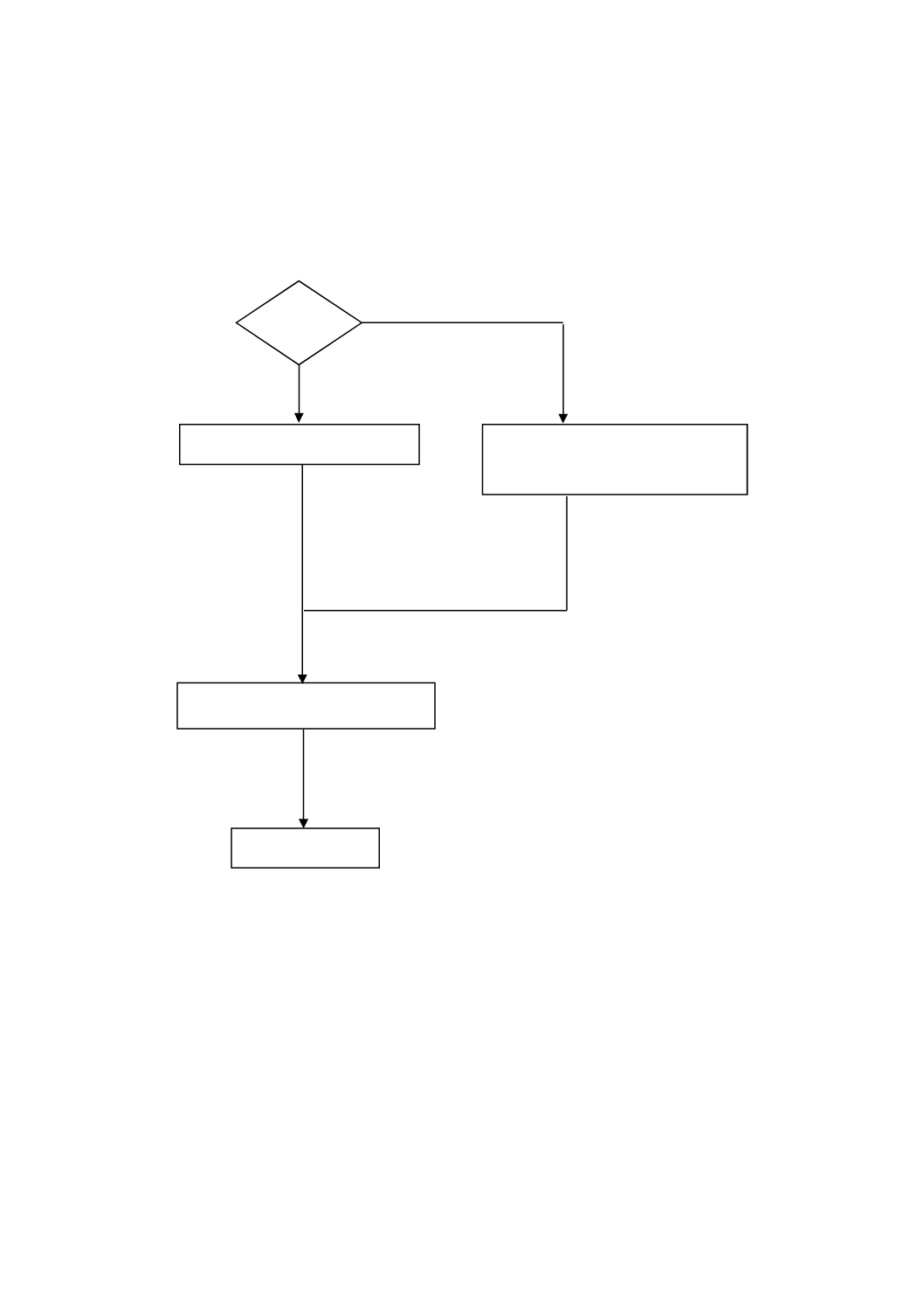
カテゴリL3の車両(PMR > 25の場合)のフローチャート
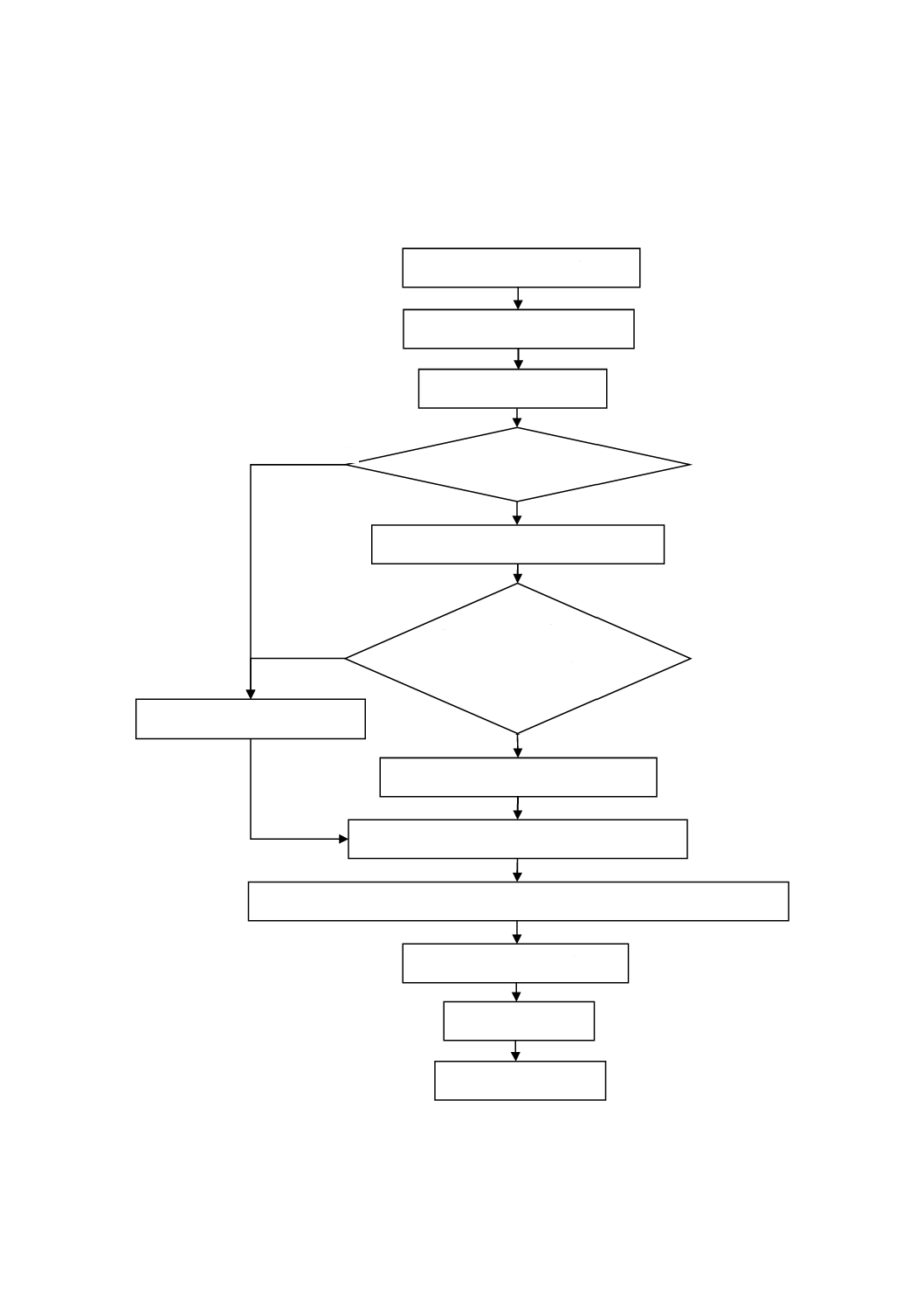
図B.1−フローチャート
PMR及びvtest の決定
単一変速段加速走行試験
aurban及びawotの決定
変速比を固定できるか。
試験方法の選択
プリ試験による変速段の選択
awot refの公差範囲内に
awot refに最も近い変速段
又はnBB'がSよりも低い
単一変速段
kPの決定
いいえ
はい
はい
いいえ
二つの変速段での加速走行試験の場合の変速比重み付け係数kの決定
二つの変速段での加速走行試験
加速走行試験と同じ変速段での定常走行試験
Lwot rep及びLcrsの決定
Lurbanの決定
20
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
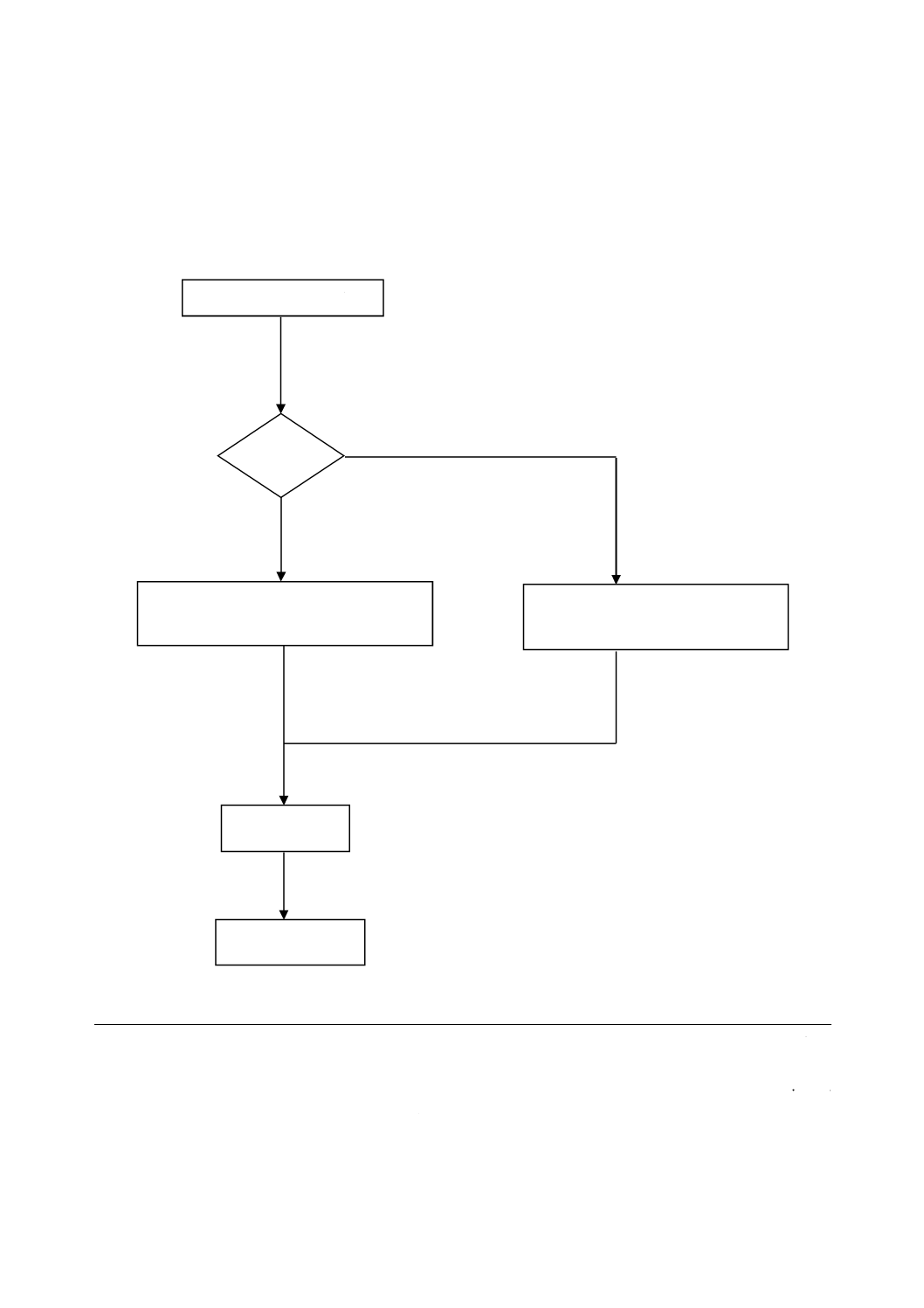
カテゴリL3の車両(PMR ≦ 25の場合)のフローチャート
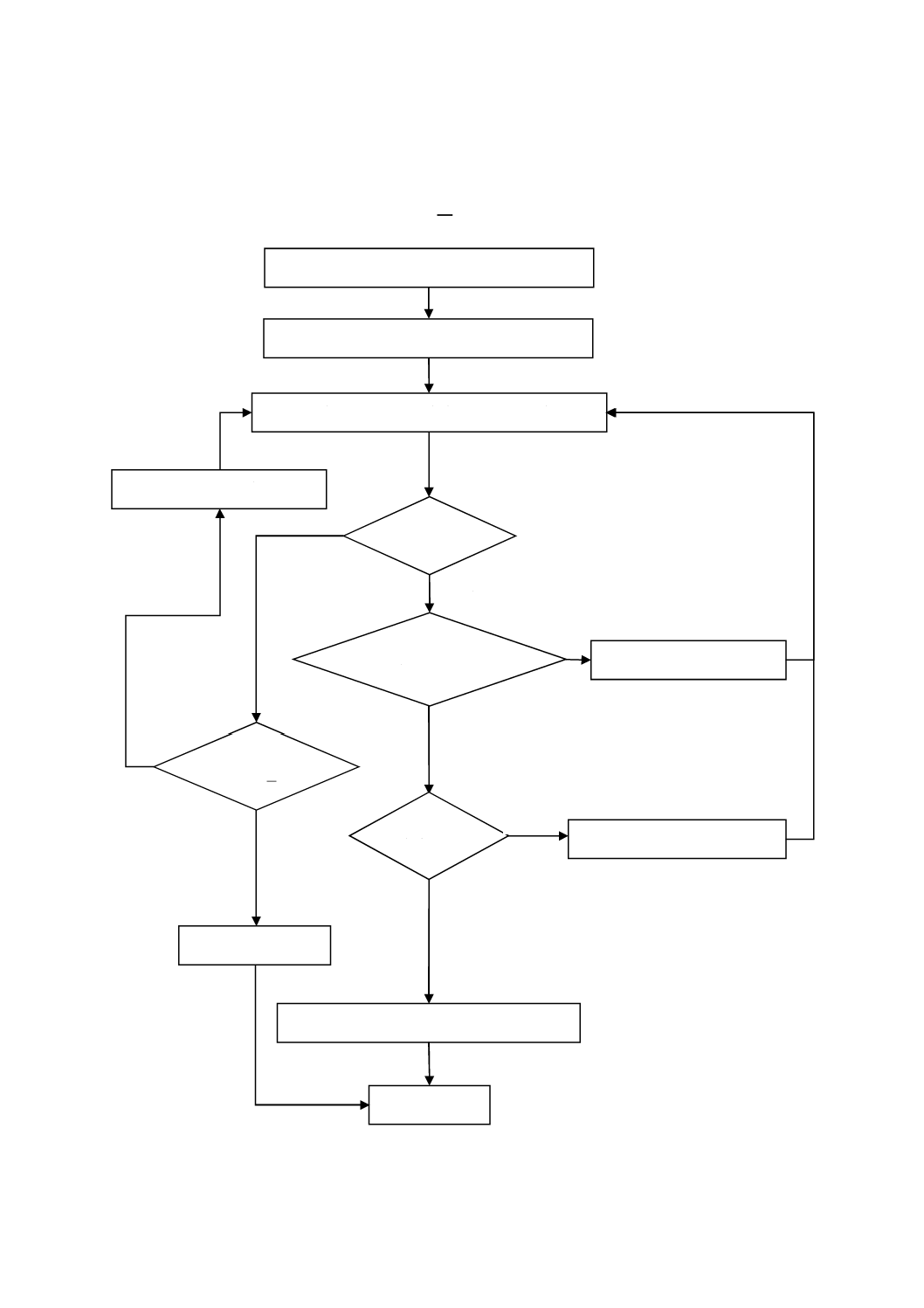
図C.1−フローチャート
最初のマイク前車速vtest=40 km/h
最も高い変速段の選択(MTの場合)
指定されたvPP'及び変速段でのプリ加速
CVT又はAT
vBB ' ≦ 0.75vmax かつ
nBB' ≦ S
最も高い
変速段
1速低い変速段
はい
いいえ
いいえ
vPP'を4 km/h減少
はい
いいえ
vBB'≦0.75vmax
かつnBB' ≦ S
はい
加速走行試験
vPP'を4 km/h減少
いいえ
1回前の変速段による加速走行試験
Lurban
はい
21
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
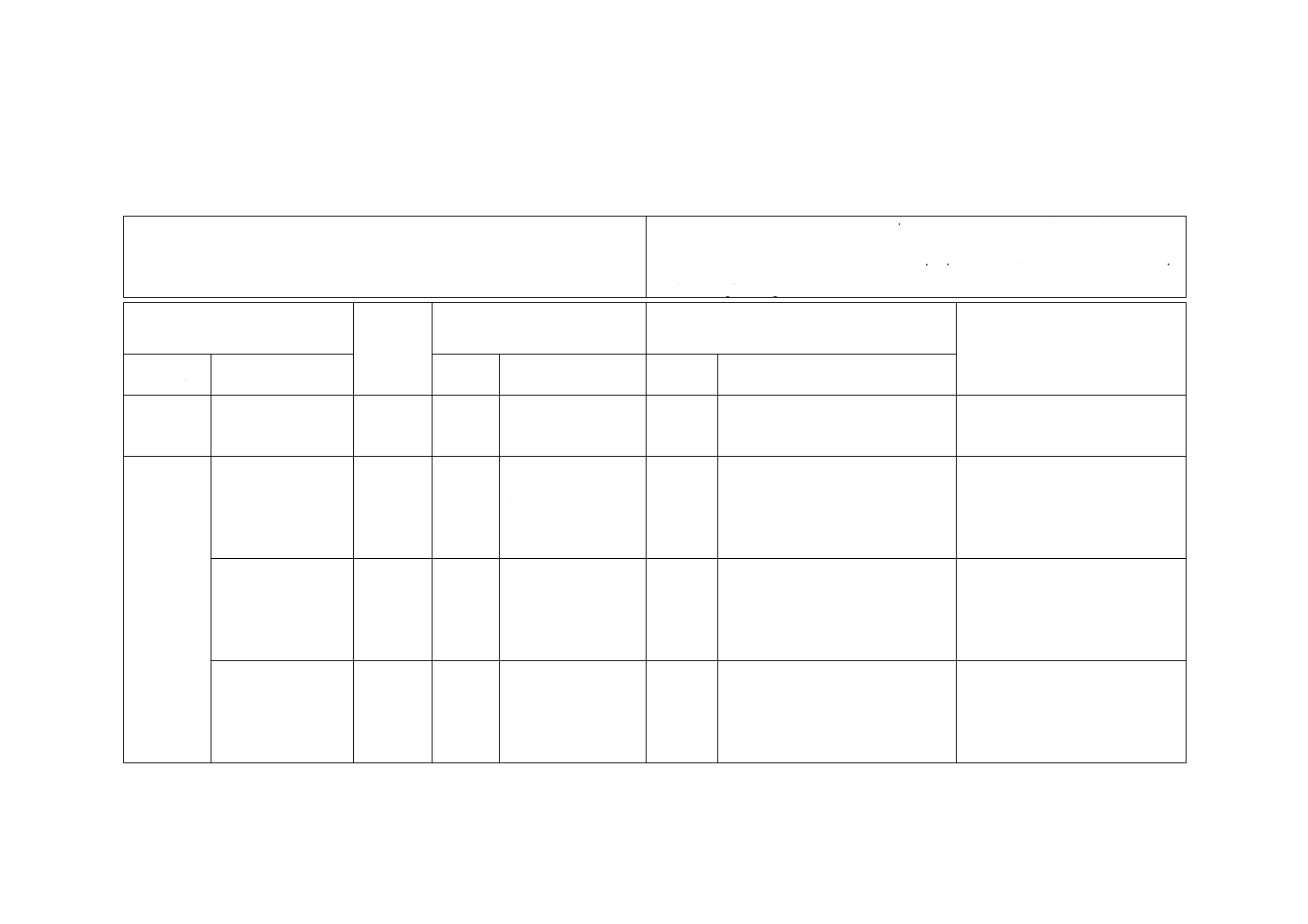
カテゴリL4及びL5の車両のフローチャート
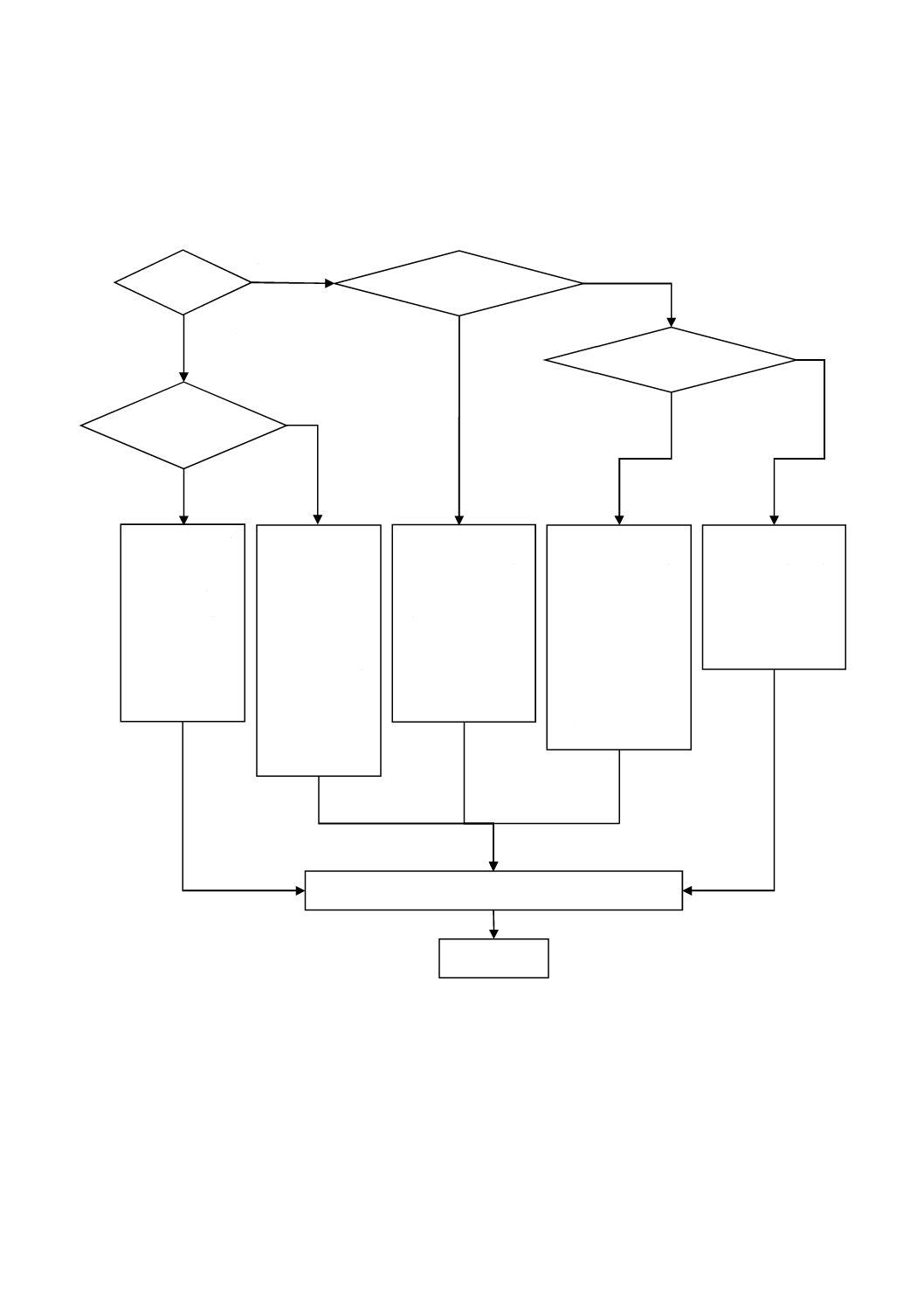
図D.1−フローチャート
いいえ
中間結果の決定
MT
5速以上の変速比
排気量≦175 cm3
いいえ
いいえ
マニュアル
ギヤセレクタ
はい
30,40 km/h及び
50 km/hとvmax
の75 %の低い
方の進入車速で
の加速走行試験
Lurban
50 km/h又はSの
75 %のいずれか
低い方の進入車
速,自動ダウン
シフトの起こら
ない最も高い変
速比での加速走
行試験
はい
50 km/h又はSの
75 %のいずれか低
い方の進入車速,2
速ギヤ(nBB'>Sの
場合には3速ギヤ)
による加速走行試
験
はい
50 km/h又はSの
75 %のいずれか低
い方の進入車速,2
速と3速の二つの
ギヤでの加速走行
試験(nBB'>Sの場
合には3速ギヤの
み)
50 km/h又はSの
75 %のいずれか低
い方の進入車速,3
速ギヤによる加速
走行試験
はい
いいえ
22
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
ISO 362-2制定の経緯
JA.1 歴史的説明
国際二輪車工業連合会(IMMA)は早くも1994年には,二輪自動車の交通実態の研究のため,カテゴリ
L3(二輪自動車)の車両に関する走行時データの収集を開始している。また,1999年及び2000年には,
オランダ環境省(VROM),オランダの研究機関であるTNO-Automotive,及びIMMAの三者が参加したプ
ロジェクトにおいて,追加の走行時データを収集している。このプロジェクトの結果,1998年の協定[車
両及び,車両に取り付けるか,車両で使用する装置部品に対する世界統一基準(GTR)制定に関する協定]
に基づき国連欧州経済委員会の規定する世界統一基準として,二輪自動車排出ガス試験法(WMTC)を採
用することとなった。
WMTCプロジェクトの目的はデータを収集して,そのデータを用いて二輪自動車特定の排出ガス試験法
を構築することであったが,その走行時データは,代表的で性能に基づく市街地騒音試験方法を定義する
基準として同じように適切であった。2002年から2004年にかけて低出力二輪自動車の走行時データを追
加収集し,エンジン排気量が小さい二輪自動車の代表的走行時データベースを確保した。2005年にはエン
ジン排気量が大きい二輪自動車について,スロットル全開時の加速度データを追加収集して加速度方程式
を改良した。ISO 362-2作成前には,広範な試験を実施して新騒音試験の実用性及び技術的精度を検証し
た。
この騒音試験は,次の一連の要求事項に従って考案した。
− 市街地及び大都市圏のような人口密集圏に近接した場合に,通常の使用状態の二輪自動車のエンジン
回転速度及び車両加速性能は,性能に基づいた加速度によって規定されるという考え。
− 特に関連性の高い二輪自動車運転時の騒音源(吸気,排気,エンジン/変速機など)分布の正確なシ
ミュレーション。
− 同一の運転環境にある別の車両型式との比較可能性。
− 将来の推進技術の試験を可能にする車両設計の独立性。
この手順では二つの運転条件,すなわち,スロットル全開時の加速運転及び定常運転を用いて,市街地
走行時に実際に使用する実用パーシャルスロットル時の加速度をシミュレーションすることを目的として
いる。この二つの主要な運転条件の組合せによって,騒音の発生に関しては,パーシャルスロットル及び
部分出力(エンジン負荷)時の加速度と同等になることが実証された。また,両運転条件は,パーシャル
スロットル・部分出力加速度より繰り返し性,再現性が高い。
カテゴリL4及びL5の測定手順は,ISO 362:1998に既に記載されており,そのカテゴリの走行時データ
が利用できるまで維持されるが,変更が必要であると思われる。
23
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(参考)
カテゴリL1及びL2の車両
(最大車速 ≦ 30 km/hの場合)のフローチャート
図JB.1−フローチャート
MT
最も高い変速比で試験を行う
車両製造業者推奨の最大車速に達する
セレクタ位置で試験を行う
はい
いいえ
最大車速での定常走行試験
中間結果の決定
24
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JC
(参考)
カテゴリL1及びL2の車両
(最大車速 > 30 km/hの場合)のフローチャート
図JC.1−フローチャート
参考文献 UN R9,UNIFORM PROVISIONS CONCERNING THE APPROVAL OF CATEGORY L2,L4 and L5
VEHICLES WITH REGARD TO NOISE
UN R41-04,Proposal for draft amendments to Regulation No. 41(i.e. Proposal for 04 series of
amendments to Regulation No. 41)
UN R63-01,UNIFORM PROVISIONS CONCERNING THE APPROVAL OF TWO-WHEELED
MOPEDS WITH REGARD TO NOISE
MT
Sの50 %以上のエンジン回転速度で進入で
きる最も高い変速比で試験を行う
車両製造業者推奨の最大車速に達する
セレクタ位置で試験を行う
はい
いいえ
加速走行試験
中間結果の決定
進入車速30 km/h一定
25
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JD
(参考)
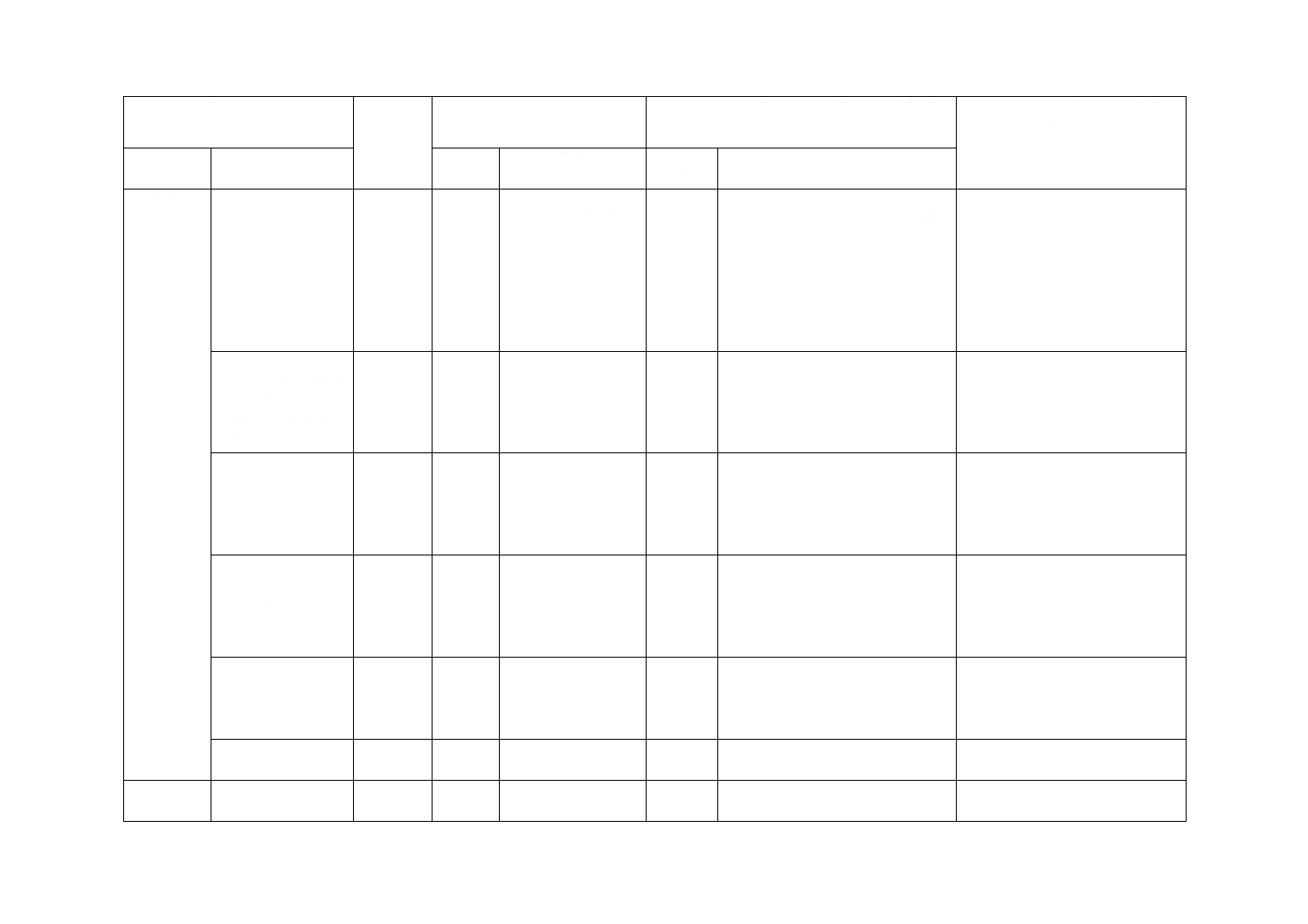
JISと対応国際規格との対比表
JIS D 1024-2:2016 自動車の加速時車外騒音試験方法−第2部:Lカテゴリ
ISO 362-2:2009,Measurement of noise emitted by accelerating road vehicles−
Engineering method−Part 2: L category
ISO 9645:1990,Acoustics−Measurement of noise emitted by two-wheeled mopeds in
motion−Engineering method
(I)JISの規定
(II)国際
規格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
3 用語及び
定義
3.4.1.1 カテゴリL1
及びL2
ISO 362-2
3.4.1.1
JISとほぼ同じ
追加
ISO規格では,モペットと定義して
いるが,JISではISO 9645のカテ
ゴリの追加。
ISO 9645の内容追加。
我が国の実状によるもの。
7 カテゴリ
L3の車両
(PMR >
25の場合)
の加速度の
規定
7.2.1 変速比を固定
できる変速機を搭
載した車両の計算
手順を規定
ISO 362-2
5.2.1
有効な試験走行の四
つのawot test, jの平均
値とする。
変更
測定回数が異なる。
JISでは,変速比を固定できる変速
機を搭載した車両の計算手順。
有効な試験走行の三つのawot test, jの
平均値とする。
JISではUN R41-04に準拠し,今
後ISO規格の改正の提案を行い整
合性を図る。
7.2.2 変速比を固定
できない変速機を
搭載した車両の計
算手順を規定
ISO 362-2
5.2.2
有効な試験走行の四
つのawot test, jの平均
値とする。
変更
測定回数が異なる。
JISでは,有効な試験走行の三つの
awot test, jの平均値とする。
JISではUN R41-04に準拠し,今
後ISO規格の改正の提案を行い整
合性を図る。
7.2.2 変速比を固定
できない変速機を
搭載した車両の計
算手順
ISO 362-2
5.2.2
予備加速を用いても
よい。
変更
予備加速の可否が異なる。
JISでは予備加速を用いてはならな
いとした。
JISではUN R41-04に準拠し,今
後ISO規格の改正の提案を行い整
合性を図る。
7
D
1
0
2
4
-2
:
2
0
1
6
26
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)国際
規格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
8 試験手順 8.3.1.3.2 変速比を
固定できる変速機
の場合の変速比の
選択を規定
ISO 362-2
8.3.1.3.2 a) 参照加速度awot ref
の10 %の許容差範囲
内の加速度を達成す
る変速段が二つある
場合には,変速比重
み付け係数kを用い
て二つの変速段を試
験に使用する。
変更
試験時の変速段が異なる。
JISでは,参照加速度awot refの10 %
の許容差範囲内の加速度を達成す
る変速段が二つある場合には,参照
加速度awot refに近い方の変速段を
試験に使用するとした。
JISではUN R41-04に準拠し,今
後ISO規格の改正の提案を行い整
合性を図る。
8.3.4 カテゴリL1及
びL2の車両(最大
車速 ≦ 30 km/hの
場合)の運転条件を
規定
ISO 362-2
該当なし
追加
JISではカテゴリの追加。
ISO 9645の内容追加なので,ISO
規格とほぼ同じ。
8.3.5 カテゴリL1及
びL2の車両(最大
車速 > 30 km/hの
場合)の運転条件を
規定
ISO 362-2
該当なし
追加
JISではカテゴリの追加。
ISO 9645の内容追加なので,ISO
規格とほぼ同じ。
8.4.1 測定読取値及
び報告値の一般事
項を規定
ISO 9645
7.3
二つの平均値の高い
方を0.5 dBごとに計
算したものを試験結
果とする。
変更
騒音値の小数点以下の処理方法が
異なる。
JISでは,最大A補正騒音レベルを,
四捨五入して小数点以下1位まで
記録するとした。
JISではUN R63-01に準拠し,今
後ISO規格を改正して整合性を図
る。
8.4.3.1 加速度を規
定
ISO 362-2
8.4.3.1
ここで使用される加
速度は,次の式(10)
に表す4回の走行の
平均加速度である。
変更
測定回数が異なる。
JISでは,使用する加速度は,次の
式(10)に表す3回の走行の平均加速
度とした。
JISではUN R41-04に準拠し,今
後ISO規格を改正して整合性を図
る。
8.4.6 カテゴリL1及
びL2の車両
ISO 362-2
該当なし
追加
カテゴリの追加。
ISO 9645の内容追加。
附属書JA
(参考)
ISO 362-2
序文
変更
L6,L7の記述を削除。
二輪車が対象のため。
7
D
1
0
2
4
-2
:
2
0
1
6
27
D 1024-2:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)国際
規格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
附属書JB
(参考)
ISO 9645
該当なし
追加
試験手順のフローチャートを追加
JISではISO 362-2に準拠し,今後
ISO規格を改正して整合性を図
る。
附属書JC
(参考)
ISO 9645
該当なし
追加
試験手順のフローチャートを追加
JISではISO 362-2に準拠し,今後
ISO規格を改正して整合性を図
る。
JISと国際規格との対応の程度の全体評価:(ISO 362-2:2009,ISO 9645:1990,MOD)
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
7
D
1
0
2
4
-2
:
2
0
1
6