D 1024-1:2016 (ISO 362-1:2015)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 2
4 記号及び単位 ··················································································································· 7
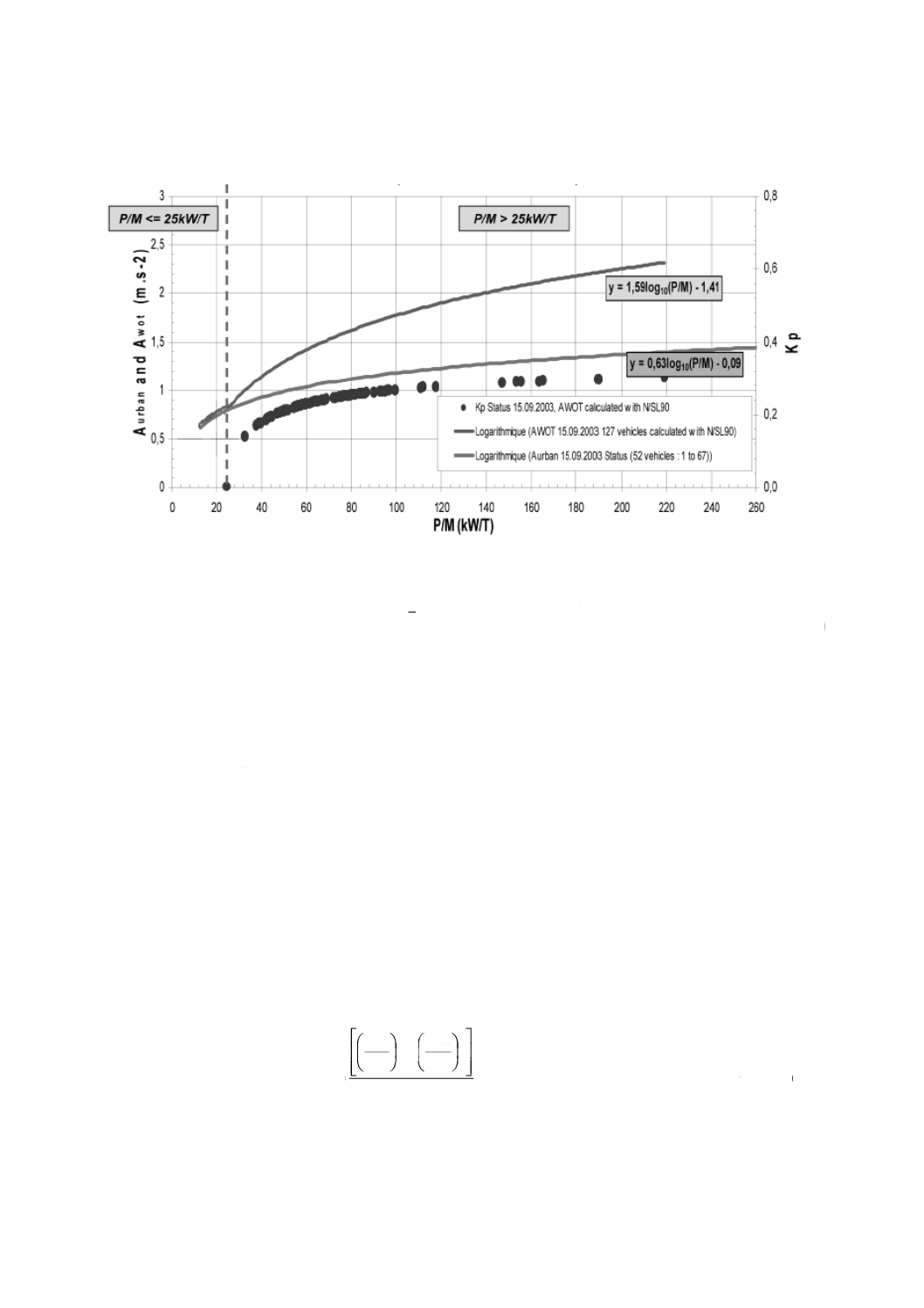
5 カテゴリM1及び最大車両総質量が3 500 kgを超えないM2,並びにカテゴリN1の車両の加速度仕様
········································································································································· 9
5.1 一般事項 ······················································································································ 9
5.2 加速度の計算 ··············································································································· 10
5.3 目標加速度の計算 ········································································································· 11
5.4 参照加速度の計算 ········································································································· 11
5.5 部分加速係数 kP ··········································································································· 11
6 測定装置························································································································ 11
6.1 音響測定装置 ··············································································································· 11
6.2 速度測定装置 ··············································································································· 12
6.3 気象条件観測装置 ········································································································· 12
7 音響環境,気象条件及び暗騒音 ·························································································· 12
7.1 試験場 ························································································································ 12
7.2 気象条件 ····················································································································· 13
7.3 暗騒音 ························································································································ 13
8 試験手順························································································································ 14
8.1 マイクロホン位置 ········································································································· 14
8.2 車両条件 ····················································································································· 14
8.3 運転条件 ····················································································································· 16
8.4 測定の読み取り及び報告値 ····························································································· 22
8.5 測定の不確かさ ············································································································ 23
9 試験報告書 ····················································································································· 24
附属書A(参考)市街地走行における実際の運転状態に基づいた自動車騒音試験方法の開発の技術的背景
········································································································································ 26
附属書B(参考)測定の不確かさISO/IEC Guide 98-3(GUM)による解析の枠組み ························· 50
附属書C(参考)カテゴリM1及び最大車両総質量が3 500 kgを超えないカテゴリM2,並びにカテゴリ
N1の手順のフローチャート ···························································································· 53
附属書D(参考)最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,N2及びN3の
変速比を固定して試験する車両のフローチャート ································································ 58
D 1024-1:2016 (ISO 362-1:2015) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
附属書E(参考)最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,N2及びN3の
変速比を固定しないで試験する車両のフローチャート ·························································· 59
附属書F(参考)最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,N2及びN3の
利用可能なエンジン回転速度のない車両のフローチャート ···················································· 61
附属書G(参考)屋内試験手順 ······························································································ 62
附属書H(参考)参考文献 ···································································································· 65
D 1024-1:2016 (ISO 362-1:2015)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,公益社団法人自動車技術会(JSAE)から,
工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経
済産業大臣が制定した日本工業規格である。
これによって,JIS D 1024:1999は廃止され,その一部を分割して制定したこの規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS D 1024の規格群には,次に示す部編成がある。
JIS D 1024-1 第1部:M及びNカテゴリ
JIS D 1024-2 第2部:Lカテゴリ
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 1024-1:2016
(ISO 362-1:2015)
自動車の加速時車外騒音試験方法−
第1部:M及びNカテゴリ
Measurement of noise emitted by accelerating road vehicles-
Engineering method-Part 1: M and N categories
序文
この規格は,2015年に第2版として発行されたISO 362-1を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,通常の市街地走行でのカテゴリM及びNの自動車が発生する音の工学的測定方法につい
て規定する。ただし,カテゴリLの車両は除く。
この規格は,市街地の通常走行時に主要騒音源から発生する音圧レベルを再現することを意図している
(附属書A参照)。
測定方法は,車両の運転条件で発生する音の再現性に矛盾のない範囲で,簡便性の要求が満たされるよ
うに規定している。
この試験方法は,広い空間で得られる音響環境を必要とする。このような条件は,通常,次の場合に用
いる。
− 車両の型式認証試験
− 製造段階での測定
− 公式試験場での測定
注記1 この試験方法によって得られた結果は,規定の試験条件で発生する騒音の客観的な測定値と
なる。ただし,自動車のうるささについての主観的評価は,騒音測定装置の指示値と単純に
関連付けられるわけではないという事実を考慮する必要がある。うるささは,個人の感覚,
生理的身体条件,文化及び環境条件に強く関係しているので,ばらつきが大きく,特定の車
両条件を示すパラメータとして有効ではない。
注記2 任意に車両を選択する抜取検査が,理想的な音響環境の下で実施されることはまれであるこ
とに注意するのがよい。この規格に規定する要求事項を満たさない音響環境の道路で測定を
実施しなくてはならない場合,得られた結果は,規定された条件の下で得られる結果から多
少の偏差があることを承知しておいたほうがよい。
注記3 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 362-1:2015,Measurement of noise emitted by accelerating road vehicles−Engineering method
−Part 1: M and N categories(IDT)
2
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 1509-1 電気音響−サウンドレベルメータ(騒音計)−第1部:仕様
注記 対応国際規格:IEC 61672-1,Electroacoustics−Sound level meters−Part 1: Specifications(IDT)
JIS C 1515 電気音響−音響校正器
注記 対応国際規格:IEC 60942,Electroacoustics−Sound calibrators(IDT)
JIS D 0050 乗用車−質量分布
注記 対応国際規格:ISO 2416:1992,Passenger cars−Mass distribution(IDT)
JIS D 0102 自動車用語−自動車の寸法,質量,荷重及び性能
注記 対応国際規格:ISO 1176,Road vehicles−Masses−Vocabulary and codes(MOD)
JIS D 8301:2013 自動車及びタイヤの車外騒音測定のための試験用路面
注記 対応国際規格:ISO 10844:2011,Acoustics−Specification of test tracks for measuring noise emitted
by road vehicles and their tyres(IDT)
JIS Z 8402(規格群) 測定方法及び測定結果の精確さ(真度及び精度)
注記 対応国際規格:ISO 5725(all parts),Accuracy (trueness and precision) of measurement methods and
results(IDT)
ISO/IEC Guide 98-3,Uncertainty of measurement−Part 3: Guide to the expression of uncertainty in
measurement (GUM:1995)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS D 0050及びJIS D 0102によるほか,次による。
3.1
車両質量
3.1.1
空車質量(kerb mass)
M1,N1及び3 500 kgを超えない最大車両総質量のM2の車両で,運転に通常必要な全ての装置を取り
付けた車両の完成出荷質量に,次の要素の質量を加えたもの。
− 潤滑油,冷却液(必要な場合)及び洗浄剤。
− 燃料(製造業者が指定する容量の少なくとも90 %以上タンクに満たす)。
− 車両の基本部品として含まれている場合は,次のその他の装置。
スペアタイヤ,車輪止め,消火器,スペア部品,工具一式。
注記 車両質量の定義は国によって異なる場合があるが,この規格では質量はJIS D 0102に含まれる
定義を参照する。
3.1.2
最大車両総質量(maximum authorized mass)
空車質量と最大許容積載量との和。
3
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.3
空車時質量(unladen vehicle mass)
次の条件で決められる,N2,N3,3 500 kgを超える最大車両総質量のM2,又はM3の公称質量。
a) 架装,及び装着されているならば,液体,工具,消火器,標準スペア部品,車輪止め,スペアタイヤ,
車両の通常操作のための電気的及び補助的な装置といった全ての工場装着の装置を含む車両の質量。
b) 燃料タンクは定格容量の少なくとも90 %まで満たされ,かつ,他の液体を含むシステム(使用中の水
に対するもの以外は)は製造業者で特定された容量の100 %まで満たされる。
3.1.4
運転者質量(driver mass)
運転者の公称質量。
3.1.5
ランニングオーダ質量(mass in running order)
次の条件で決められる,N2,N3,3 500 kgを超える最大車両総質量のM2,又はM3の公称質量。
a) 空車時質量と運転者質量との合計。
b) 追加乗務員の座席を含むカテゴリM2,M3車両の場合,その質量は,同様に扱われ運転者質量と等し
い。
注記 運転者質量は,JIS D 0050に従って計算される。
3.1.6
最大許容軸(車軸群)荷重[maximum axle (group of axles) capacity]
車両製造業者によって定義される,車軸(車軸群)に加わる最大質量と一致している許容質量で,車軸
製造業者の指定を超えない。
3.1.7
空車軸(車軸群)荷重[unladen axle (group of axles) load]
空車状態で車軸(車軸群)に加わる実際の質量。
注記 空車時質量は,空車軸(車軸群)荷重の総和と同じ。
3.1.8
追加荷重(extra loading)
空車時質量に追加する質量。
3.1.9
積載軸(車軸群)荷重[laden axle (group of axles) load]
積載状態で車軸(車軸群)に加わる実際の質量。
3.2
出力質量比指数,PMR(power-to-mass ratio index)
次の式による,加速度計算のために使われる無次元量。
000
1
PMR
t
n×
=mP
ここに,
Pn: 総エンジン出力の数値(kW)
mt: 試験時質量の数値(kg)
4
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.1
総エンジン出力(total engine power)
利用できる推進力源からの出力の和。
3.3
定格エンジン回転速度,S(rated engine speed)
製造業者が規定する定格最大ネット出力時のエンジン回転速度。
注記1 定格最大ネット出力が複数のエンジン回転速度で達成される場合は,この規格で使われるS
は,最も高いエンジン回転速度である。
注記2 JIS Z 8000-3に従って,rated engine speedを,定格エンジン回転速度と定義した。
3.4
車両カテゴリ
3.4.1
カテゴリL(category L)
四輪未満の車両,又は空車質量及び最大定格出力の小さい四輪の車両。
注記 国連欧州経済委員会(UNECE)文書のTRANS/WP.29/78/Rev.1/Amend.4 (26 April 2005) は,L6
及びL7に定義されるように四輪車両までLカテゴリを広げた。
3.4.1.1
カテゴリL1及びL2(category L1 and L2)
モペット。
注記 詳細は,JIS D 1024-2を参照。
3.4.1.2
カテゴリL3(category L3)
エンジン排気量が50 cm3を超える,又は最大車速が50 km/hを超える二輪自動車。
3.4.1.3
カテゴリL4(category L4)
エンジン排気量が50 cm3を超える,又は最大車速が50 km/hを超える三輪自動車で,車輪が車の縦軸に
対し非対称に取り付けられている車両。
3.4.1.4
カテゴリL5(category L5)
エンジン排気量が50 cm3を超える,又は最大車速が50 km/hを超える三輪自動車で,定格車両総質量が
1 000 kg以下で,車輪が車の縦軸に対し対称に取り付けられている車両。
3.4.1.5
カテゴリL6(category L6)
空車時質量が350 kg以下(最大車速が45 km/hを超える電気自動車の場合はバッテリの質量を含めな
い。),及び火花点火機関のエンジン排気量は50 cm3以下,又は他の内燃機関の場合最大ネット出力は4 kW
以下,又は電動エンジンの場合最大連続定格出力は4 kW以下の四輪自動車。
3.4.1.6
カテゴリL7(category L7)
カテゴリL6以外で,空車時質量が400 kg(荷物を運ぶ車両は550 kg)以下(電気自動車の場合はバッ
テリの質量を含めない。),及び最大定格出力は15 kW以下の四輪自動車。
5
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.4.2
カテゴリM(category M)
乗客の輸送に使用される四輪以上の自動車。
3.4.2.1
カテゴリM1(category M1)
乗客の輸送に使用され,運転席のほかに8席以下の座席を装備する自動車。
3.4.2.2
カテゴリM2(category M2)
乗客の輸送に使用され,運転席のほかに8席を超える座席を装備し,最大質量が5 000 kg以下の自動車。
注記 “最大質量”は,この規格のほかで使われる“最大車両総質量”と同意義。
3.4.2.3
カテゴリM3(category M3)
乗客の輸送に使用され,運転席のほかに8席を超える座席を装備し,最大質量が5 000 kgを超える自動
車。
注記 “最大質量”は,この規格のほかで使われる“最大車両総質量”と同意義。
3.4.2.4
カテゴリM2又はM3の未完成車
シャシレール又はチューブアッセンブリ,動力源,車軸だけの未完成車。輸送会社の要求に応じて特製
する車体で完成される。
3.4.3
カテゴリN(category N)
貨物の輸送に使用される四輪以上の自動車。
3.4.3.1
カテゴリN1(category N1)
貨物の輸送に使用され,最大車両総質量が3 500 kg以下の自動車。
3.4.3.2
カテゴリN2(category N2)
貨物の輸送に使用され,最大車両総質量が3 500 kgを超え,12 000 kg以下の自動車。
3.4.3.3
カテゴリN3(category N3)
貨物の輸送に使用され,最大車両総質量が12 000 kgを超える自動車。
3.5
基準点(reference point)
自動車の設計及びカテゴリで決まる点。
3.5.1
カテゴリM1,N1及び最大車両総質量が3 500 kg以下のM2車両の基準点(reference point for category M1 and
N1 vehicles and M2 having a maximum authorized mass not exceeding 3 500 kg)
車両の基準点を,次に示す。
− フロントエンジン車は車両の先端。
− ミッドエンジン車は車両の中央。
6
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− リヤエンジン車は車両の後端。
3.5.2
最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,N2及びN3の車両の基準点
(reference point for category M2 having a maximum authorized mass exceeding 3 500 kg, M3, N2, and N3
vehicles)
車両の基準点を,次に示す。
− フロントエンジン車は車両の先端。
− ほかの車は車両の先端に最も近いエンジンの境界。
3.6
目標加速度(target acceleration)
統計調査から得られた,市街地走行における部分加速状態での加速度。
注記 より詳細な説明は,附属書Aを参照。
3.7
参照加速度(reference acceleration)
試験路での加速走行試験のために要求される加速度。
注記 より詳細な説明は,附属書Aを参照。
3.8
変速比重み付け係数,k(gear ratio weighting factor)
加速走行試験及び定常走行試験において二つの変速比の結果を結合させる無次元量。
3.9
部分加速係数,kP(partial power factor)
M1,N1及び最大車両総質量が3 500 kg以下のM2車両で,加速走行試験及び定常走行試験の試験結果
の重み付け結合で使われる無次元量。
注記 より詳細な説明は,附属書Aを参照。
3.10
予備加速(pre-acceleration)
AA'とBB'との間で安定した加速度を得るための,AA'より前での加速制御手段の使用。
注記 詳細は,図1を参照。
3.11
固定変速比(locked gear ratio)
変速機の変速比が試験中に変化しないような変速機の制御。
3.12
エンジン(engine)
取り外せる附属品のない動力源。
注記 動力源は,ここでは駆動力のための全ての動力源,例えば,単独又は他の動力源と組み合わせ
て使われる電気又は油圧動力源を含む。
3.13
試験路長,l10(test track length)
PP'からBB'への加速度の計算に用いられる試験路の長さ。
7
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.14
試験路長,l20(test track length)
AA'からBB'への加速度の計算に用いられる試験路の長さ。
3.15
目標エンジン回転速度,ntarget BB'(target engine rotational speed)
最大車両総質量が3 500 kgを超えるカテゴリM2及びN2の車両は回転速度Sの70 %と74 %との間,カ
テゴリM3及びN3の車両は回転速度Sの85 %と89 %との間。
3.16
目標車両速度,vtarget BB'(target vehicle speed)
35 km/h ± 5 km/hの車両速度。
4
記号及び単位
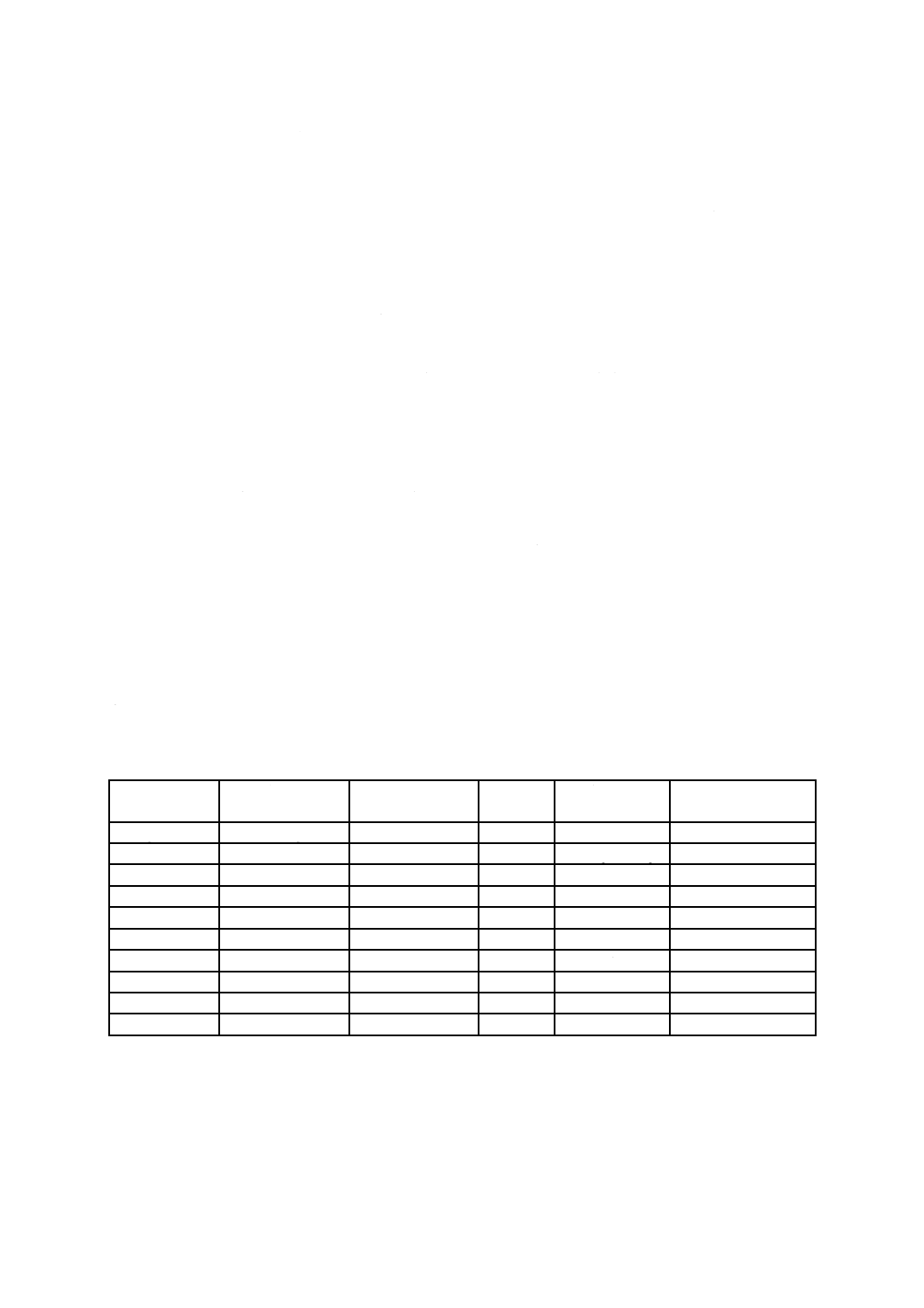
この規格で用いる記号及び単位,並びにそれらが最初に使われた細分箇条を,表1に示す。
表1−記号及び対応する細分箇条
記号
単位
細分箇条
説明
AA'
−
3.10
車両の進行方向に直角の線で,試験中に騒音レベルを記録する試験
路の開始位置
ai
m/s2
A.2.6
変速段iにおける部分加速時の加速度
amax
m/s2
A.2.2.3
実際の走行調査で測定された加速走行状態の最大加速度
amax 90
m/s2
A.2.3.1
実際の走行調査で測定された加速走行状態の累積頻度90 %にある最
大加速度
awot
m/s2
A.2.2.1
市街地で実際の走行時に計測された特定の車両の加速度
awot 50
m/s2
A.2.8.1
車速50 km/hでの放射音の累積頻度90 %にある特定の車両の加速度
awot i
m/s2
5.1
変速段iにおける全開加速時の加速度
awot (i + 1)
m/s2
5.1
変速段(i+1)における全開加速時の加速度
awot test
m/s2
5.1
単一変速段試験の場合の全開加速時の加速度
awot ref
m/s2
5.4
全開加速試験のための参照加速度
aurban
m/s2
5.3
市街地走行時の加速度に相当する目標加速度
BB'
−
3.10
車両の進行方向に直角の線で,試験中に音圧レベルを記録する試験
路の終了位置
CC'
−
8.1
JIS D 8301に規定する試験路面を通る車両走行線
δ1〜δ7
dB
B.2
不確かさを考慮に入れるための入力量
gear i
−
8.3.2.3.2
車両試験で使用する二つの変速段のうちの最初の変速段
gear (i + 1)
−
8.3.2.3.2
変速段iより低いエンジン回転速度で二つの変速段のうちの2番目の
変速比
gear x
−
8.3.2.3.2
M2>3 500 kg,M3,N2及びN3の試験条件においてある基準を満足
して使用される二つの変速段のうちの最初の変速段
gear y
−
8.3.2.3.2
M2>3 500 kg,M3,N2及びN3の試験条件においてある基準を満足
して使用される二つの変速段のうちの2番目の変速段
j
−
i又は(i+1)で実施される全ての加速又は定常試験の個々の走行試験
の順番を表す数字
kP
−
3.9
部分加速係数
k
−
3.8
変速比重み付け係数
kn
−
A.2.8.1
変速比間の補間係数
lref
m
5.1
基準長
8
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号及び対応する細分箇条(続き)
記号
単位
細分箇条
説明
lveh
m
5.1
車両全長
l10
m
3.13
PP'からBB'の加速度を計算するための試験路の長さ
l20
m
3.14
AA'からBB'の加速度を計算するための試験路の長さ
Lcrs i
dB
8.4.3.2
変速段iでの定常走行試験における車両の音圧レベル
Lcrs (i + 1)
dB
8.4.3.2
変速段(i+1)での定常走行試験における車両の音圧レベル
Lcrs rep
dB
8.4.3.2
定常走行試験における車両の音圧レベル報告値
Lwot i
dB
8.4.3.2
変速段iでの全開試験における車両の音圧レベル
Lwot (i + 1)
dB
8.4.3.2
変速段(i+1)での全開試験における車両の音圧レベル
Lwot rep
dB
8.4.3.2
全開試験での車両の音圧レベル報告値
Lurban
dB
8.4.3.2
市街地走行に相当する車両の音圧レベル報告値
mfa load unladen
kg
8.2.2.1
空車時前軸荷重
mac ra max
kg
8.2.2.1
最大許容後軸荷重
mra load unladen
kg
8.2.2.1
空車時後軸荷重
md
kg
8.2.2.1
運転者質量
mkerb
kg
8.2.2.1
車両の空車質量
mchassisM2M3
kg
8.2.2.1
未完成の車両(M2又はM3)の質量
mxloadM2M3
kg
8.2.2.1
未完成の車両(M2又はM3)に車両製造業者の選定によってランニ
ングオーダの車両質量に達するための追加荷重
mfa load laden
kg
8.2.2.2.2
積載時前軸荷重
mra load laden
kg
8.2.2.2.2
積載時後軸荷重
mref
kg
8.2.2.1
空車質量+運転者質量75 kg(カテゴリLは75 kg ± 5 kg)
mro
kg
8.2.2.1
ランニングオーダ質量
mt
kg
3.2
車両の試験時質量
mtarget
kg
8.2.2.1
車両の目標質量
munladen
kg
8.2.2.1
空車時質量
mxload
kg
8.2.2.1
追加荷重
n
1/min
A.2.4
車両のエンジン回転速度
nPP'
1/min
9
基準点がPP'を通過するときの車両のエンジン回転速度
nBB'
1/min
8.3.2.1
基準点がBB'を通過するときの車両のエンジン回転速度
ntarget BB'
1/min
8.3.2.2
基準点がBB'を通過するときの車両の目標エンジン回転速度
(5.1 基準点の定義参照)
(n/S)a 90
−
A.2.8.1
加速度の累積頻度90 %にあるエンジン回転速度の比
(n/S)L 90
−
A.2.6
発生音の累積頻度90 %にあるエンジン回転速度の比
(n/S)i
−
A.2.8.1
変速段iにおける最大加速時のエンジン回転速度の比
(n/S)(i + 1)
−
A.2.8.1
変速段 (i+1) における最大加速時のエンジン回転速度の比
PMR
−
3.2
計算のために使用する出力質量比指数
Pn
kW
3.2
定格総エンジン出力(JIS D 1001参照)
PP'
−
3.13
マイクロホンの位置を規定している車両進行方法に垂直な線
S
1/min
3.3
1分間当たりの定格エンジン回転速度であり,最大出力時のエンジン
回転速度に同じ。
vAA'
km/h
5.1.1
基準点がAA'を通過するときの車速(5.1 基準点の定義参照)
vBB'
km/h
5.1.1
基準点又は車両の後端がBB'を通過するときの車速(5.1 基準点の
定義参照)
vBB'1
km/h
8.3.2.3.3
ある条件に一致するときの目標車両速度
vBB'2
km/h
8.3.2.3.3
ある条件に一致するときの目標車両速度
vPP'
km/h
5.1.1
基準点がPP'を通過するときの車両速度(5.1 基準点の定義参照)
9
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号及び対応する細分箇条(続き)
記号
単位
細分箇条
説明
vtarget BB'
km/h
8.3.2.2
基準点がBB'を通過するときの目標車両速度(5.1 基準点の定義参
照)
vtest
km/h
8.3.1.2
目標試験車両速度
va max 50
km/h
A.2.3.1
実際の走行調査で測定された加速時の最大加速度の累積頻度50 %に
ある車両速度
va max 90
km/h
A.2.3.1
実際の走行調査で測定された加速時の最大加速度の累積頻度90 %に
ある車両速度
5
カテゴリM1及び最大車両総質量が3 500 kgを超えないM2,並びにカテゴリN1の車両の加速度仕様
5.1
一般事項
5.1.1
適用範囲及び条件
全ての加速度は,試験路で異なる車両速度を使って計算する。
5.2に示す式を使ってawot i,awot (i + 1) 及びawot testを計算する。
基準点がAA'又は PP'を通過するときの車両速度を,AA'での車速(vAA')又はPP'での車速(vPP')と定
義する。
車両後端がBB'を通過するときの車両速度をBB'での車速(vBB')と定義する。
加速度の決定に使った方法は,試験報告書に示す。
車両の基準点の定義によって,式(2)及び式(3)の中で車両全長の違いを考慮する。
基準点が車両前端の場合,lref=lveh,すなわち,車両全長とする。
基準点が車両中間の場合,lref=0.5 lveh,すなわち,車両全長の0.5倍とする。
基準点が車両の後端の場合,lref=0とする。
車両製造業者の選択で,フロントエンジン車はlref=5 m,及びミッドエンジン車はlref=2.5 mを使って
もよい。
試験路の寸法を使って加速度の計算をする。
これらの寸法は,次に定義する。l20=20 m,l10=10 m
多種多様な技術があるので,計算のために異なる方法を考える必要がある。
無段変速機のような新しい技術及び電子制御がない自動変速機のような旧式技術は,加速度を適切に決
定するために更に特定の処置が要求される。
加速度の計算のために与えられる処置は,これらの要求を満たさなければならない。
5.1.2
総エンジン出力の計算
この規格で規定された試験条件において,二つ以上の駆動力源が作動する場合,総エンジン出力Pnは,
車両に搭載されて同時駆動エンジンの算術和とする。
適用できる同時駆動エンジンとは,この規格で規定される試験条件の下で車両に組み合わせて前進の動
きを与える動力源のことである。
非燃焼エンジンの出力仕様は,車両製造業者が定めた出力でなければならない。
注記1 この段落の意図するところは,並列様式(すなわち,ハイブリッド車)において同時に駆動
することが可能な二つ又はそれ以上のエンジンをもつ車両が,後に示す出力質量比指数の計
算に使う車両の出力を決定するために,電力と燃焼出力との合計を使うことを保障すること
である。
10
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記2 認証,又は他の法規目的のために,全ての試験条件で燃焼エンジンの動作を要求することが
必要かもしれない。
5.1.3
バッテリの充電状態
駆動用バッテリを搭載している場合は,車両製造業者の設定仕様による全ての主な機能を可能とするよ
うに,十分高い充電状態でなければならない。駆動用バッテリは,全ての主な機能を発揮できるような温
度の範囲でなければならない。その他の様式の充電式エネルギー貯蔵システムは,試験中に動作可能な状
態に準備しなければならない。
5.2
加速度の計算
5.2.1
変速比を固定して試験される手動変速機,自動変速機,適応型変速機,及び無段自動変速機(CVT)
をもつ車両の計算手順
変速段選択の決定に使うawot test の値は,有効な計測走行中の四つのawot test, jの平均値とする。
awot test, j の計算には,式(1)を用いる。
(
)
ref
20
2
,
AA'
2
,
BB'
,
test
wot
2
6.3
6.3
l
l
v
v
a
j
j
j
+
−
=
················································· (1)
ここに,
awot test, j: 加速度の数値(m/s2)
vBB', j,vAA', j: 車両速度の数値(km/h)
l20,lref: 長さの数値(m)
予備加速を使ってもよい。
それぞれのawot test, jは,小数点以下2位(x.xx)までを報告する。awot testの計算はそれぞれのawot test, jを使
い,awot testの最終報告は,小数点以下2位(x.xx)までとする。最終報告したawot testは,以下の全ての計算
に使用する。
5.2.2
変速比を固定しないで試験される自動変速機,適応型変速機,及び無段自動変速機をもつ車両の計
算手順
変速段選択の決定に使うawot testの値は,有効な計測走行中の四つのawot test, jの平均値とする。
試験要件を満足する目的で,変速機を制御するために8.3.1.3.3に記載される装置及び方法を使う場合は,
式(1)を用いてawot test, jを計算する。
予備加速を使ってもよい。
8.3.1.3.3に記載される装置及び方法を使わない場合は,式(2)を用いてawot test, jを計算する。
(
)
ref
10
2
PP'
2
BB'
,
test
wot
2
6.3
6.3
l
l
v
v
a
j
+
−
=
····················································· (2)
ここに,
awot test, j: 加速度の数値(m/s2)
vPP',vBB': 車両速度の数値(km/h)
l10,lref: 長さの数値(m)
予備加速をしてはならない。
それぞれのawot test, jは,小数点以下2位(x.xx)までを報告する。awot testの計算はそれぞれのawot test, jを使
い,awot testの最終報告は,小数点以下2位(x.xx)までとする。最終報告したawot testは,以下の全ての計算
に使用する。
注記 この種類の車両では,この規格の将来的な改正に備えた情報を提供するために,AA',PP'及び
BB'における車速を記録することが有益である。
11
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3
目標加速度の計算
aurbanは,式(3)を用いて計算する。
(
)
09
.0
PMR
log
63
.0
urban
−
×
=
a
························································ (3)
ここに,
aurban: 加速度の値(m/s2)
PMR: 無次元の出力質量比指数
計算したaurbanの値は,小数点以下2位(x.xx)までを報告する。報告したaurbanは,以下の全ての計算
に使用する。
5.4
参照加速度の計算
awot refは,式(4)及び式(5)を用いて計算する。
25 ≦ PMRの場合
(
)
41
.1
PMR
log
59
.1
ref
wot
−
×
=
a
······················································· (4)
又は
25 > PMRの場合
(
)
09
.0
PMR
log
63
.0
urban
ref
wot
−
×
=
=a
a
············································· (5)
ここに,
awot ref: 加速度の値(m/s2)
aurban: 市街地走行に関連した加速度の数値(m/s2)
PMR: 無次元の出力質量比指数
計算したawot refの値は,小数点以下2位(x.xx)までを報告する。報告したawot refは,以下の全ての計算
に使用する。
注記 特定の車両のawot ref及びaurbanの計算は,実際の走行状態のデータを統計的に解析した結果に基
づいている。このように,これは,適切な目標加速度を特定するための関数として使われるの
で,厳密に言えば無次元の独立変数PMRに基づく加速度の計算ではない。
5.5
部分加速係数 kP
部分加速係数kPは,式(6)を用いて計算する。
test
wot
urban
P
1aa
k
−
=
·········································································· (6)
単一変速段の試験以外の場合は,awot testに代わって8.4.3.2に規定されるawot refを使う。
最終報告するkPの値は,小数点以下2位(x.xx)に丸める。最終報告したawot refは,以下の全ての計算
に使用する。
6
測定装置
6.1
音響測定装置
6.1.1
一般
音圧レベルの測定に用いる装置は,製造業者の推奨するウィンドスクリーンを使用する場合を含め,JIS
C 1509-1のクラス1の要求事項に適合するサウンドレベルメータ(騒音計)又は等価の測定装置でなけれ
ばならない。
測定装置全体は,JIS C 1515のクラス1の要求事項に適合する音響校正器によって校正する。
測定は,JIS C 1509-1に規定される音響測定装置の時間重み付け特性“F”及び周波数重み付け特性“A”
を用いて行う。A特性時間重み付きサウンドレベル(騒音レベル)を周期的にモニタリングする測定装置
を使う場合,30 ms以下のサンプリング間隔で読み取る。
12
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
測定装置は,製造業者の指示に従って保守され,校正されなければならない。
6.1.2
校正
一連の測定ごとの初め及び終わりに,音響測定システム全体は6.1.1に規定される音響校正器によって校
正する。
読み取り値の差は,追加調節なしで0.5 dB以下とする。
この値を超過した場合,先の校正以降に得られた測定の結果は無効とする。
6.1.3
検定
JIS C 1515の要求事項に従う音響校正器は,1年に一度検定する。
JIS C 1509-1の要求事項に従う測定装置は,少なくとも2年ごとに検定する。
全ての検定試験は,公認された試験機関によって,適切な基準に基づいた校正を行う。
6.2
速度測定装置
エンジン回転速度は,測定時に必要なエンジン回転速度で,少なくとも±2 %の精度を満たす装置で測
定する。
車速は,連続的に計測する装置を使用する場合,少なくとも±0.5 km/hの精度を満たす装置で測定する。
独立した速度測定装置を用いる場合,少なくとも±0.2 km/hの精度を満たすものとする。
注記 独立した速度測定装置は,二つ以上の個別の装置を用いて,vAA',vBB'及びvPP'の値が求められる。
連続測定装置の場合は,必要な全ての速度情報を一つの装置から求められる。
6.3
気象条件観測装置
試験中の環境条件の監視に使用する気象条件観測装置は,次の許容値を満たさなければならない。
− 温度測定装置は,±1 ℃
− 風速測定装置は,±1.0 m/s
− 気圧測定装置は,±5 hPa
− 相対湿度測定装置は,±5 %
7
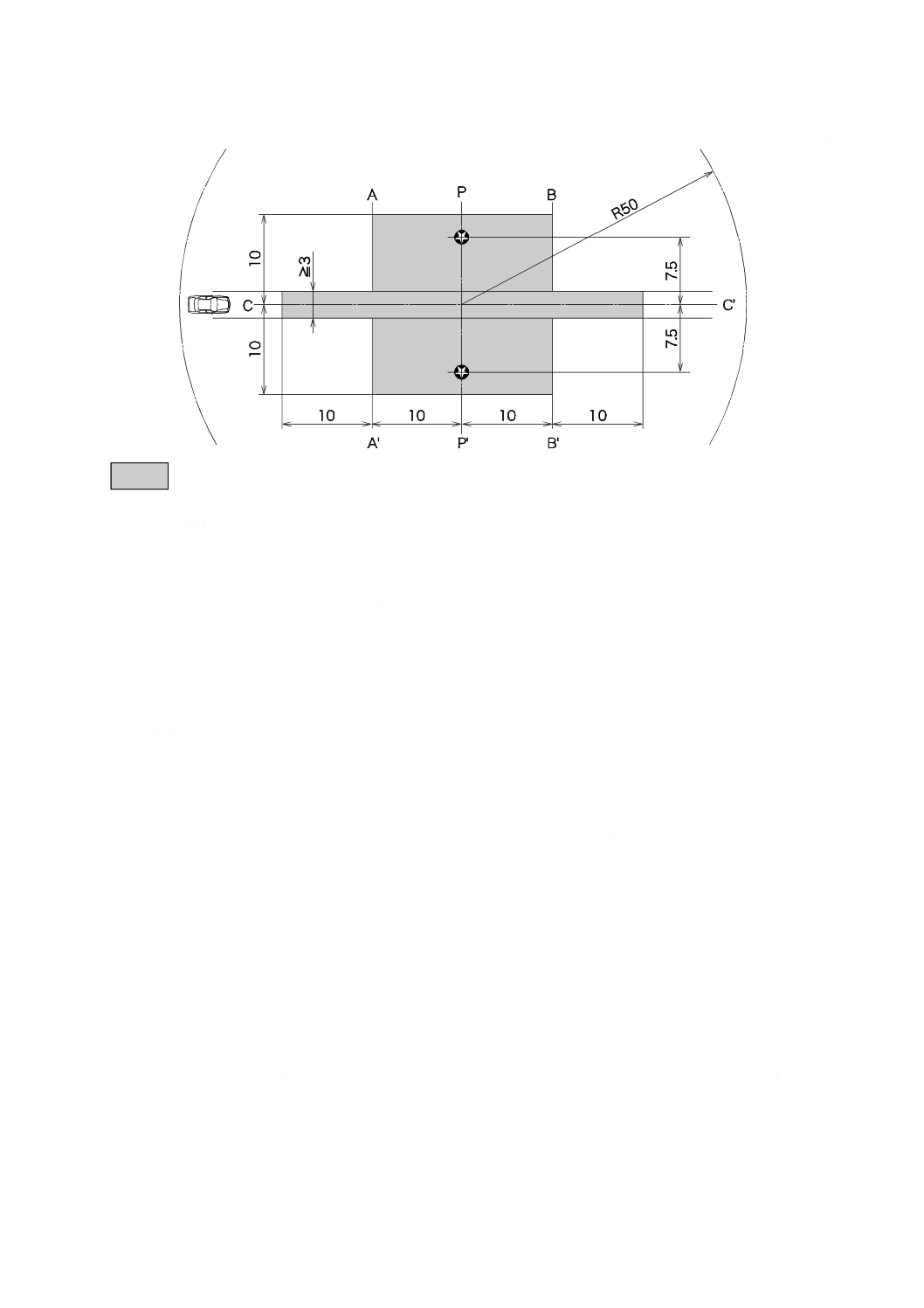
音響環境,気象条件及び暗騒音
7.1
試験場
試験場は,実質的に水平であるものとする。
試験路の構造及び表面は,JIS D 8301:2013の要求を満たすものとする。
JIS D 8301:1993による試験場寸法を,図1に示す。
注記1 図1の中のシンボルは,JIS D 8301:1993から直接コピーするもので,この規格の中のシンボ
ルと必ずしも一致していない。
コースの中心から周囲半径50 m以内に,フェンス,岩,橋又は建物のような大きな反射物がないもの
とする。試験路及び試験場の表面は乾燥しており,粉雪又は石くずのような吸音性物質がないものとする。
マイクロホンの近くに,音響的に影響を及ぼす障害物はないものとする。また,人はマイクロホンと音
源の間にいないものとする。測定観測者は読み取りに影響を及ぼさないような位置にいるものとする。
注記2 半径50 m外の建物でもその反射音が試験路に集中する場合には,重大な影響を及ぼすおそれ
がある。
13
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 m
試験路面の最小領域,すなわち,試験領域
∝
マイクロホン位置(高さ1.2 m)
AA' 試験区間の開始線
BB' 試験区間の終了線
CC' 試験区間を通過する車両走行線
PP' マイクロホン位置の間を通過する車両と直角の線
R50 試験路の中心から半径50 m
注記 スマッジング部分(試験領域)は,JIS D 8301に適合した表面で舗装された最小領域である。
図1−試験場の寸法
7.2
気象条件
気象条件観測装置は,試験場を代表するデータを提示するものとし,測定するマイクロホンと同じ高さ
で,試験領域に隣接して設置する。
測定は,気温が5 ℃〜40 ℃の範囲で行う。
騒音測定中に突風を含む風速がマイクロホン高さで5 m/sを超過する場合は,試験を行わない。
気温,風速及び風向,相対湿度並びに気圧の代表値は,騒音測定中に記録する。
注記 気温及び他の要因の影響に関しては,附属書Bを参照する。
7.3
暗騒音
車両の一般的な音圧レベルの特性と無関係なピークは,測定値を読み取るときに無視する。
暗騒音は,一連の車両試験の直前直後に10秒間測定する。測定は,試験で使用される同じマイクロホン
及びマイクロホン位置で,実施する。A特性での最大音圧レベルを報告する。
暗騒音(風音を含む。)は,試験中の車両によって発生するA特性時間重み付きサウンドレベルより少
なくとも10 dB低いものとする。暗騒音レベルと測定された音圧レベルとの差が,10 dB〜15 dBである場
合,j番目の試験結果を計算するために,サウンドレベルメータの読み値から表2に示す適切な補正値を
差し引く。
14
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−個々の測定値に適用される補正値
単位 dB
暗騒音レベルと測定された音圧レ
ベルとの差
10
11
12
13
14
15以上
補正値
0.5
0.4
0.3
0.2
0.1
0.0
8
試験手順
8.1
マイクロホン位置
マイクロホンラインPP'上のマイクロホン位置から試験路上の基準線CC'の距離は,7.5 m ± 0.05 mと
する。
マイクロホンは,地上1.2 m ± 0.02 mの高さに配置する。
自由音場条件(JIS C 1509-1を参照。)のための基準方向は,水平かつ車両走行線CC'に垂直とする。
8.2
車両条件
8.2.1
一般条件
車両は,車両製造業者の指定に従って準備する。
車両は,測定を始める前に通常の運転状態にする。
走行と走行との間にニュートラルでアイドリングして1分間待てば,走行間の結果のばらつきが減少す
る可能性がある。
8.2.2
車両試験時質量
8.2.2.1
一般
測定は,表3に指定された試験時質量mtの車両で行う。
表3−試験時質量 mt
車両カテゴリ 車両の試験時質量kg
M1
mt = mref = mkerb + md
mdは,JIS D 0050による運転者質量の75 kgである。試験時質量は,±5 %の許容範囲とする。
N1 a),b)
mt = mref = mkerb + md
mdは,JIS D 0050による運転者質量の75 kgである。試験時質量は,±5 %の許容範囲とする。
N2,N3
mtarget = 50 [kg/kW] × Pn [kW] 目標質量(mtarget)に合わせるための追加荷重(mxload)は,後軸上
に置かれるものとする。
追加荷重の合計及び空車時後軸荷重(mra load unladen)の合計は,最大許容後軸荷重(mac ra max)の75 %
までに制限される。目標質量は,±5 %の許容範囲とする。
後軸の中心に追加荷重の重心を配置することができない場合,試験時質量(mt)は,空車時前軸
荷重(mfa load unladen),空車時後軸荷重,追加荷重,及び運転者質量(md)の合計を超えてはならな
い。
2軸を超える車両の試験時質量は,2軸の車両と同じとする。
2軸以上の車両の空車時質量(munladen)が2軸の車両の試験時質量を超える場合,この車両は追加
荷重なしで試験を行う。
M2,M3
mt = mroランニングオーダ質量は,±5 %の許容範囲とする。
未完成車
M2,M3
N2,N3の手順によって算出するmtarget(上記参照)
又は
mt = mchassisM2M3 + mxloadM2M3 = mro
ランニングオーダ質量は,±5 %の許容範囲とする。
注a) カテゴリN1車両は,試験実施上の理由のために車両製造業者の判断で荷重を付加することができる。この
行為は認められるが,それはより高い車両騒音に結び付くこともある(一般的に1 dB)。
b) 試験時に荷重がこれらの車両に加えられている場合,追加荷重は試験報告書に記載する。
15
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2.2.2
N2及びN3に限定した追加荷重決定の算出手順
8.2.2.2.1
追加荷重の算出
カテゴリN2及びN3の2軸車の目標質量(定格出力kW当たり)は,表3に規定する。
)
kw
(
kw
kg
50
n
target
P
m
×
=
·························································· (7)
車両試験に必要な目標質量(mtarget)を達成するために,式(8)で与えられるように後軸上に追加される追
加荷重(mxload)及び運転者質量(md)を空車に加えなければならない。
xload
d
unladen
target
m
m
m
m
+
+
=
···························································· (8)
目標質量(mtarget)は,±5 %の許容範囲とする。
式(9)で与えられるように試験車両の空車時質量(munladen)は,空車時前軸荷重(mfa load unladen)及び空車
時後軸荷重(mra load unladen)を測定することによって算出される。
unladen
load
ra
unladen
load
fa
unladen
m
m
m
+
=
··················································· (9)
式(8)及び式(9)で与えられるように追加荷重(mxload)は,式(10)及び式(11)によって算出される。
(
)
unladen
d
target
xload
m
m
m
m
+
−
=
························································ (10)
(
)
unladen
load
ra
unladen
load
fa
d
target
xload
m
m
m
m
m
+
+
−
=
····································(11)
式(12)で与えられるように追加荷重の合計及び空車時後軸荷重(mra load unladen)の合計は,最大許容後軸荷
重(mac ra max)の75 %までに制限される。
unladen
load
ra
xload
max
ra
ac
75
.0
m
m
m
+
×
≧
··············································· (12)
追加荷重(mxload)は,式(13)によって制限される。
unladen
load
ra
max
ra
ac
xload
75
.0
m
m
m
−
×
≦
··············································· (13)
式(11)で計算された追加荷重(mxload)が式(13)を満たせば,追加荷重は式(11)に等しくなる。
車両の試験時質量(mt)は,式(14)によって求められる。
unladen
load
ra
unladen
load
fa
d
xload
t
m
m
m
m
m
+
+
+
=
········································ (14)
この場合,車両の試験時質量は,目標質量と等しくなる。
target
t
m
m=
·············································································· (15)
式(11)で計算された追加荷重(mxload)が式(13)を満たさず,式(16)となる場合
16
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
unladen
load
ra
max
ra
ac
xload
75
.0
m
m
m
−
×
>
················································ (16)
追加荷重(mxload)は,式(17)によって与えられる。
unladen
load
ra
max
ra
ac
xload
75
.0
m
m
m
−
×
=
················································ (17)
また,車両の試験時質量(mt)は,式(18)によって与えられる。
unladen
load
fa
d
max
ra
ac
t
75
.0
m
m
m
m
+
+
×
=
·············································· (18)
この場合,車両の試験時質量は,目標質量より小さい。
target
t
m
m<
·············································································· (19)
8.2.2.2.2
荷重が後軸の中心に積載できない場合の荷重の考え方
後軸の中心に追加荷重の重心を配置することができない場合,車両の試験時質量(mt)は,空車時前軸
荷重(mfa load unladen),空車時後軸荷重,追加荷重,及び運転者質量(md)の合計を超えてはならない。
これは,追加荷重が車両に搭載され,それが後軸中心に位置する場合,前軸及び後軸の実測荷重の和は
式(20)で与えられるように,試験時質量から運転者質量を引いたものに等しいことを意味する。
laden
load
ra
laden
load
fa
d
t
m
m
m
m
+
=
−
····················································· (20)
ここに,
unladen
load
fa
laden
load
fa
m
m
=
······························································ (21)
後軸の中心に追加荷重の重心を配置することができない場合でも,式(20)を満たす。
しかし,追加荷重が前軸に部分的にその質量が配分されたので,式(22)となる。
unladen
load
fa
laden
load
fa
m
m
>
······························································ (22)
その場合,前軸に移動された質量を補うため,後軸上へ更に質量を加えてはならない。
8.2.2.2.3
2軸を超える車両の試験時質量
2軸を超える車両を試験する場合,この車両の試験時質量は,2軸の車両のための試験時質量と同じとす
る。
2軸を超える車両の空車時質量が,2軸の車両の試験時質量より重い場合,この車両は追加荷重なしで試
験する
8.2.3
タイヤの選定及び条件
タイヤは車両に適正であるものとし,製造業者によって車両の試験時質量用に推奨された圧力に調整す
る。M1及びN1のタイヤ空気圧は,車両製造業者によって推奨された圧力とする。
認証及び関連する目的の場合は,法規によって規定されたタイヤに対する追加要件が必要である。試験
に使用するタイヤは,車両製造業者によって選択されるものとし,車両製造業者がその車両用に設定した
タイヤサイズ及び種類の一つに一致させる。タイヤは,その車両と同時期に市場で市販され入手可能なも
のとする。
注記 トレッド溝深さは,試験結果に大きな影響を及ぼす可能性がある。
8.3
運転条件
8.3.1
カテゴリM1及び最大車両総質量が3 500 kgを超えないM2,並びにカテゴリN1
8.3.1.1
一般条件
17
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
AA'への進入から車両後端がBB'を通過するまで試験全体を通じて,車両の中心線の進路がCC'にできる
だけ沿って運転する(図1参照)。
けん引車両から容易に分離できないトレーラは,ラインBB'の通過判定時には,無視する。二輪駆動を
超える駆動軸がある車両の場合は,通常の道路で使用する駆動条件で試験する。車両に補助手動変速機又
は多段変速軸が搭載されている場合は,通常の市街地で使用する変速段位置で試験する。全ての場合に,
低速移動,駐車又は制動のための変速段は除外する。
8.3.1.2
試験車速
試験車速vtestは50 km/h ± 1 km/hである。3.5に従った基準点がラインPP'にあるときに,試験車速が達
成されていなければならない。8.3.1.3.2に従って試験車速が変更されるなら,変更された試験車速は加速
走行試験及び定常走行試験の両方に適用されなければならない。
8.3.1.3
変速段の選択
8.3.1.3.1
一般
必要な加速度を達成するため,正しい試験のやり方を決定することは,製造業者の責任である。
8.3.1.3.2及び8.3.1.3.3に従って,車両の変速機,変速段又は変速比を,awot ref(全開加速試験のための参
照加速度)に最も近い加速度を実現するために選ばなければならない。
車両の変速機,変速段又は変速比は,キックダウン機能除外を含めた,電子的,又は機械的な手段によ
って制御してもよい。
試験実施の支援として,カテゴリM1及び最大車両総質量が3 500 kgを超えないM2,並びにカテゴリ
N1の,変速比選択基準及び試験走行基準をフローチャート形式で附属書Cに示す。
8.3.1.3.2
変速比を固定して試験する手動変速機,自動変速機,適応型変速機,又は無段自動変速機(CVTs)
式(4)に従う全開加速試験のための参照加速度awot refに関連して,試験時の変速比の選択は,5.2.1の記載
に従って全開加速条件で得られた加速度awot,iに応じて決まる。
変速比の選択は,次の条件となる。
注記1 変速比の選択は,4回の全開加速の加速度awot test, jの平均値によって決まる。
a) ある特定の変速比で得られた加速度が,参照加速度awot refの±5 %の許容範囲内で,かつ,2.0 m/s2を
超えない場合は,その変速比で試験する。
注記2 個々の走行のawot test, jは,参照加速度の5 %を上回る場合がある。
b) どの変速比においても必要な加速度が得られない場合は,参照加速度よりも高い加速度の変速段i,
及び参照加速度よりも低い加速度の変速段 (i+1) を選択する。変速段iにおける加速度の値が2.0 m/s2
を超えない場合は,両方の変速比を試験に使用する。
参照加速度awot refに関する変速比重み付け係数kは,式(23)によって計算される。
)1
(
wot
wot
)1
(
wot
ref
wot
+
+
−
−
=
i
i
i
a
a
a
a
k
··································································· (23)
c) 変速段i又は (i+1) の加速度の値が2.0 m/s2を超える場合は,変速段i+1の加速度がaurbanを下回らな
い限り,2.0 m/s2以下の加速度を与える最初の変速比を使用するものとする。試験中に得られた全開加
速時の加速度awot testは,awot refの代わりに単一変速比試験の部分加速係数kPの計算に使用するものと
する。
d) 変速段 (i+1) の加速度がaurbanに達しない場合は,変速比iの加速度が2.0 m/s2を超えても,i及び (i+1)
の二個の変速比が使用される。参照加速度awot refに関する変速比重み付け係数kは,式(23)によって求
められる。
18
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 車両の変速機に選択できる変速比が一つしかない場合,全開加速試験は,この変速比を選択して実施
される。
部分加速係数kP(3.9参照)の計算では,awot refの代わりに得られた加速度awot testが使用される。
− ある変速比において,車両がBB'を通過する前に定格エンジン回転速度を超える場合,次に高い変速
比を使用する。次に高い変速比の加速度が目標加速度aurbanに達しない場合,試験車速vtestを,2.5 km/h
ずつ低下させ,変速比の選定は,8.3.1.3.2の選択肢での指定に従って進める。いかなる場合も,試験
車速は40 km/hより下げない。
この場合,awot testはaurbanを超えなくても,この変速比で許容される。
8.3.1.3.3
変速比を固定しないで試験する自動変速機,適応型変速機,及び無段自動変速機
全自動変速位置を使用するものとする。
加速度awot testは,5.2で定義された式(1)又は式(2)で計算するものとする。
試験中は,より低い変速比で高い加速度への変速段に変速してもよい。より高い変速比で低い加速度の
変速段への変速は許されない。いかなる場合も,市街地走行において製造業者によって定義された特定の
条件では,一般的に使用されない変速段への変速は避けるものとする。
したがって,市街地走行において指定された試験条件では通常使用されない変速比へのダウンシフトを
防止するために,代替変速段位置を含む電子装置及び機械装置を設定し使用することが認められる。
得られた加速度awot testは,aurban以上でなければならない。
可能であれば,製造業者は加速度値awot testがawot ref又は2.0 m/s2の低い方を超えない対策をとることとす
る。加速度条件を実現するために,車両状態を制御する全ての車両技術に対する電気的又は機械的処置は
許される。
得られた加速度awot testは,awot refの代わりに部分加速係数kP(3.9参照)の計算に使用される。
8.3.1.4
加速走行試験
加速走行試験は,8.3.1.2に指定された試験車速で,8.3.1.3に従って,車両に指定された全ての変速比で
実施するものとする。
車両の基準点がAA'に達したときに加速制御装置を全加速状態にして,車両の後端がBB'に達するまで
全加速状態を保たなければならない。その後,加速制御装置を解除しなければならない。加速がAA'を超
えて遅れる場合は予備加速を使用してもよい。加速の開始位置を報告しなければならない。
車速は,小数点以下1位まで記録しなければならない。
計算された加速度awot testは,小数点以下2位まで記録しなければならない。
8.3.1.5
定常走行試験
PMRが25未満の車両には定常走行試験は求められない。
8.3.1.3.2に規定する変速機を装備した車両については,加速走行試験で実施したものと同じ変速段で定
常走行試験を実施するものとする。8.3.1.3.3に規定する変速機を装備した車両については,全自動変速位
置を使用するものとする。加速走行試験について変速段が固定されている場合は,定常走行試験について
も同じ変速段に固定するものとする。
定常走行試験中は,AA'とBB'との間で8.3.1.2に規定された車速を維持するように加速制御装置を保持
するものとする。
8.3.2
最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,N2及びN3の車両
8.3.2.1
一般条件
車両の中心線は,ラインAA'に進入してから,車両の後部がラインBB'を通過するか,基準点がライン
19
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
BB'を5 m通過するか,いずれか早い方までの全試験区間中を,できるだけラインCC'に近く沿うものとす
る(図1参照)。試験は,トレーラ及びセミトレーラなしで実施するものとする。トレーラがけん引車両
から容易に切り離すことができない場合,ラインBB'の通過を判断するときにはトレーラを無視するもの
とする。車両にコンクリートミキサ,コンプレッサなどの装置が組み込まれている場合,試験中は装置を
作動させてはならない。試験時積載量を含んだ車両の試験時質量は,表3に従うものとする。
変速段及び車両速度の選択決定に使用されるnBB'及びvBB'の値は,四つの有効な測定のnBB', jとvBB', jとの
平均であるものとする。
nBB'の値は,10 rpmの精度で報告する。報告したnBB'は,次の全ての計算で使用する。
vBB'の値は,小数点以下1位(xx.x)までを報告する。報告されたvBB'は,次の全ての計算で使用する。
8.3.2.2
目標条件
8.3.2.2.1
最大車両総質量が3 500 kgを超えるカテゴリM2,及びカテゴリN2
基準点がBB'を通過するとき,エンジン回転速度nBB'は,目標エンジン回転速度ntarget BB'を満たすものと
する。目標エンジン回転速度ntarget BB'は,定格エンジン回転速度Sの70 %から74 %までとする。
基準点がBB'を通過するとき,車両速度vBB'は,目標車両速度vtarget BB'を満たすものとする。目標車両速
度vtarget BB'は,35 km/h ± 5 km/hとする。
8.3.2.2.2
カテゴリM3及びN3
基準点がBB'を通過するときは,エンジン回転速度nBB'は目標エンジン回転速度ntarget BB'を満たすものと
する。目標エンジン回転速度ntarget BB'は,定格エンジン回転速度Sの85 %から89 %までとする。
基準点がBB'を通過するとき,車両速度vBB'は,目標車両速度vtarget BB'を満たすものとする。目標車両速
度vtarget BB'は,35 km/h ± 5 km/hとする。
8.3.2.3
変速段選択
8.3.2.3.1
一般
必要条件を達成するための,正しい試験のやり方を決定することは製造業者の責任である。
安定した加速状態を確保する。
車両の変速機,変速段又は変速比は,8.3.2.2に従った目標条件を満足できるように選択しなければなら
ない。車両の変速機,変速段又は変速比は,キックダウン機能の解除を含む電子的,又は機械的手段によ
って制御してもよい。
附属書D,附属書E及び附属書Fは,試験手順を補助するフローチャートの中で,最大車両総質量が3
500 kgを超えるカテゴリM2,並びにカテゴリN2,M3及びN3の変速段選択基準及び試験走行基準を与え
る。
8.3.2.3.2
変速比を固定して試験する手動変速機,自動変速機,適応型変速機,又は無段自動変速機(CVTs)
変速段の選択は,目標条件によって決定する。
8.3.2.2の目標条件を満たすための条件は次となる。
a) 一つの変速段だけが,目標エンジン回転速度ntarget BB'及び目標車両速度vtarget BB'の両条件を満たす場合
は,その変速段で試験する。
b) 複数の変速段が,目標エンジン回転速度ntarget BB'及び目標車両速度vtarget BB'の両条件を満たす場合は,
35 km/hに最も近い変速段iで試験する。
c) 二つの変速段が,目標エンジン回転速度ntarget BB'及び目標車両速度vtarget BB'の両条件を満たし,かつ,
次の条件も満たす場合,両変速段ともLurbanの計算に使用される。
(vtarget BB'−vBB'gear i)=(vBB'gear i+1−vtarget BB')
20
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 一つの変速段が,エンジン回転速度の目標条件ntarget BB'を満たすが,車両速度の目標条件vtarget BB'を満
たさない場合,二つの変速段gearx及びgearyを使う。これら二つの変速段の車両速度の目標条件は,
次のとおりとする。
gearx
25 km/h ≦ vBB'x ≦ 30 km/h
及び
geary
40 km/h ≦ vBB'y ≦ 45 km/h
両変速段,gearx及びgearyは,目標エンジン回転速度ntarget BB'を満たすものとする。
両変速段はLurbanの計算に使用される。
一つの変速段だけが目標エンジン回転速度ntarget BB'を満たす場合は,その変速段で試験する。この変
速段は,Lurbanの計算に使用される。
e) 条件d)で,二つの変速段のいずれも目標エンジン回転速度ntarget BB'を満たさなかった場合,条件f)を選
ばなければならない。
f)
目標エンジン回転速度を満たす変速段がない場合は,目標車速vtarget BB'を満たし,目標エンジン回転速
度 ntarget BB'を超えない,できるだけntarget BB'に近い変速段を選択する。
vBB'gear i = vtarget BB'
n BB'gear i ≦ ntarget BB'
安定した加速状態が確保されるものとする。安定した加速が確保できない変速段は無効とする。全ての
状態で,車両の基準点が測定区間にある間,定格エンジン回転速度を超えないものとする。測定区間内で
定格エンジン回転速度を超える場合,この変速段は無効とする。
8.3.2.3.3
変速比を固定しないで試験する自動変速機,適応型変速機,及び無段自動変速機
全自動変速位置を使用するものとする。
試験中は,より低い変速比で高い加速度への変速段に変速してもよい。より高い変速比で低い加速度の
変速段への変速は許されない。いかなる場合も,市街地走行において製造業者によって定義された特定の
条件では,一般的に使用されない変速段への変速は避けるものとする。
したがって,市街地走行において指定された試験条件では通常使用されない変速比へのダウンシフトを
防止するために,代替変速段位置を含む電子装置及び機械装置を設定し使用することが認められる。
8.3.2.2の目標条件を満たすための条件を,次に示す。
a) 目標エンジン回転速度ntarget BB'及び目標車両速度vtarget BB'の両条件を満たす変速段位置が選択される場
合,その変速段位置で試験するものとする。
b) 選択された変速段変速位置が,目標エンジン回転速度ntarget BB'の条件を満たすが,目標車両速度vtarget BB'
の条件を満たさない場合,車両速度の目標条件を次の二つの条件に変更する。
vBB'1を次のように定義する。
25 km/h ≦ vBB'1 ≦ 35 km/h
及び
vBB'2を次のように定義する。
35 km/h ≦ vBB'2 ≦ 45 km/h
vBB'1及びvBB'2の二試験を行うものとする。
両試験条件は,Lurbanの計算で使う。
21
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 条件b)で,目標エンジン回転速度ntarget BB'を満たすことができなかった場合,条件d)が選ばれるもの
とする。
d) 選択された変速段変速位置が,目標エンジン回転速度ntarget BB'の条件を満たせず,目標車両速度vtarget BB'
の条件を満たせる場合,車両速度の目標条件を次の二つの条件に変更する。
vBB'1を次のように定義する。
25 km/h ≦ vBB'1 ≦ 30 km/h
及び
vBB'2を次のように定義する。
40 km/h ≦ vBB'2 ≦ 45 km/h
vBB'1及びvBB'2の2試験を行うものとする。
目標エンジン回転速度 ntarget BB'を超えない,できるだけntarget BB'に近いnBB'を試験に使う。
nBB'i ≦ ntarget BB' ここに,i =1,2
もし,次の条件を満たすことができない場合,条件e)が使用されるものとする。
nBB'i ≦ ntarget BB' ここに,i =1,2
e) 目標エンジン回転速度ntarget BB'及び目標車両速度vtarget BB'の条件を満たさない変速段位置しか選択でき
ない場合,車両速度の目標条件を次のように変更するものとする。
vBB' = vtarget BB' + 5 km/h
目標エンジン回転速度ntarget BB'に最も近いnBB'の車両速度vBB'で,試験を行うものとする。
車両がラインPP'を通過後の,より高い変速比で低い加速度の変速段への変速は,認められるもの
とする。
f)
試験中のエンジン回転速度を制限する変速段位置(D)だけを選択させる変速機設計が車両に採用さ
れている場合,車両は目標車両速度vtarget BB'だけを使用して試験するものとする。
8.3.2.3.4
利用可能なエンジン回転速度のない動力源
利用できるエンジン回転速度がない動力源を備えた車両は,車両速度vtarget BB'の目標条件を満たさなけれ
ばならない。
8.3.2.2の目標条件vtarget BB'を満たす条件を,次に示す。
a) エンジン回転速度が利用できない場合,目標車両速度vtarget BB'だけを満たす必要がある。
b) エンジン回転速度が利用できず,及び目標車両速度vtarget BB'を満たせない場合,次の二つの試験条件で
実施する。
最初の試験条件のvBB'1は,次のとおりとする。
25 km/h ≦ vBB'1 ≦35 km/h
及び
第2の試験条件のvBB'2は,次のとおりとする。
35 km/h ≦ vBB'2 ≦ 45 km/h
両試験条件は,Lurbanの計算で使う。
c) エンジン回転速度が利用できず,目標車両速度vtarget BB',及び次で定義されるvBB'1を満たせない場合,
次で定義されるvBB'2で試験を行わなければならない。
25 km/h ≦ vBB'1 ≦ 35 km/h
35 km/h ≦ vBB'2 ≦ 45 km/h
vBB'2の試験条件は,Lurbanの計算で使う。
22
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 目標車両速度の範囲の解釈を示す。
目標車両速度vtarget BB'は,基準点がラインBB'を通過したときの車速vBB'の結果が,30 km/hから
40 km/hの車速範囲にある場合,vtarget BB'= 35 km/h ± 5 km/hと定義される。目標車両速度vtarget BB'
が上記速度範囲より低い,及び高い二つの目標車両速度に変更された場合は,次のようになる。
低い方の目標車両速度は,基準点がラインBB'を通過するときの車速vBB'1が25 km/h から35
km/hまでで,目標車両速度vtarget BB'を5 km/h下げる(vtarget BB' −5 km/h)。
25 km/h ≦ vBB'1 ≦ 35 km/h
高い方の目標車両速度は,基準点がラインBB'を通過するときの車速vBB'2が35 km/hから45
km/hまでで,目標車両速度vtarget BB'を5 km/h上げる(vtarget BB' + 5 km/h)。
35 km/h ≦ vBB'2 ≦ 45 km/h
8.3.2.4
全開試験
車両の基準点がAA'に達した時点で加速制御装置を一杯に踏み込み,基準点がBB'+5 mに達するまで,
踏み込んだ状態にしておくものとする。加速制御装置を製造業者の要望によって開放することができる。
8.4
測定の読み取り及び報告値
8.4.1
一般
8.4.1.1
試験条件及び承諾
全ての試験条件に対して,車両の両側及び各変速比で,少なくとも4回測定するものとする。
いずれの試験条件においても,無効な結果の削除後,2.0 dB以内の,最初から四つの連続した有効な測
定結果(順番j)は,該当する中間又は最終結果の計算に使われる。
AA'における車速(vAA'),BB'における車速(vBB')及びPP'における車速(vPP')は,小数点以下1位まで
記録し,計算に使用する。
8.4.1.2
カテゴリM1及び最大車両総質量が3 500 kgを超えないM2,並びにカテゴリN1の車両
AA'とBB'との間の,車両の各走行におけるA特性時間重み付きサウンドレベルの最大値を,有効な小
数点以下1位まで(例えば,xx.x)記録する(図1参照)。
一般的な音圧レベルの特性以外のピークが認められる場合,その測定を無効とする。
8.4.1.3
最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,N2及びN3の車両
AA'とBB'+5 mとの間の車両の各走行におけるA特性時間重み付きサウンドレベルの最大値を,有効な
小数点以下1位まで(例えば,xx.x)記録する(図1参照)。
一般的な音圧レベルの特性以外のピークが認められる場合,その測定を無効とする。
8.4.2
データ処理
それぞれの試験条件に対して,車両の両側の結果は別々に平均するものとする。
各側の中間結果は,小数点以下1位に四捨五入した算術平均値とする。
Lurbanを求めるための以降の計算は,車両の左右別々に行う。試験結果として報告する最終値は,両側の
値のうち,高い方とする。
最終結果は,最も近い整数値に四捨五入し報告する。
注記1 計算は,車両騒音の発生状況と一致したデータを得るために,車両の左右の両側で別々に行
う。
注記2 小数点以下1位までの報告結果は,測定がこの精度まで正確であることを意味しない。詳細
な扱いについては,測定の不確かさ8.5を参照する。
23
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.4.3
カテゴリM1及び最大車両総質量が3 500 kgを超えないM2,並びにカテゴリN1の車両
8.4.3.1
加速度
以後に使用する加速度は,式(24)で得られる4回の走行の加速度の平均である。
[
]
)4(
test
wot
)3(
test
wot
)2(
test
wot
)1(
test
wot
test
wot
4
1
a
a
a
a
a
+
+
+
×
=
······················ (24)
ここで,括弧内の数字は,試験走行jを表す。
8.4.3.2
報告値及び最終結果
式(25)によって全開試験の報告値Lwot repを,計算する。
[
]
)1
(
wot
wot
)1
(
wot
rep
wot
+
+
−
+
=
i
i
i
L
L
k
L
L
··············································· (25)
ここで,kは,変速比重み付け係数である。
式(26)によって定常走行試験の報告値Lcrs repを,計算する。
[
]
)1
(
crs
crs
)1
(
crs
rep
crs
+
+
−
+
=
i
i
i
L
L
k
L
L
·················································· (26)
一つの変速比での試験の場合,報告値は,試験結果自体から直接求める。
部分加速係数kPの算出式は,次のとおりとする。
a) 一つの変速比での試験以外の場合,kPは式(27)で算出する。
−
=
ref
wot
urban
P
1
a
a
k
······································································ (27)
b) 一つの変速比での試験の場合は,kPは式(28)で算出する。
−
=
test
wot
urban
P
1
a
a
k
······································································ (28)
c) awot testがaurbanより小さい場合は,次による。
0
P=
k
··················································································· (29)
最終結果は,Lwot repの式(25)及びLcrs repの式(26)を使って式(30)で算出する。
)
(
rep
crs
rep
wot
P
rep
wot
urban
L
L
k
L
L
−
−
=
················································ (30)
最終結果Lurbanは,最も近い整数値に四捨五入する。この値を最終結果として報告する。
8.4.4
最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,N2及びN3の車両
一つの試験条件の結果が使用される場合は,最終結果Lurbanは8.4.2に定められた最大値である。
二つの試験条件の結果が使用される場合は,二つの試験条件による,各側二つの試験結果の算術平均を
求めるものとする。
最終結果Lurbanは,計算された二つの算術平均値の最大値である。
最終結果Lurbanは,最も近い整数値に四捨五入する。この値を最終結果として報告する。
8.5
測定の不確かさ
8.4に記載した測定手順は,複数のパラメータ(例えば,JIS D 8301の路面テクスチャの変動,環境条件,
計測システムの不確かさなど)の影響を受け,同一の対象で測定した音圧レベルにばらつきが生じる。
このばらつきの原因及び特性は,完全には分かっておらず,予測できない形で最終結果に影響を及ぼす
ことがある。
この規格による測定結果の不確かさは,ISO/IEC Guide 98-3に記載した手順又はJIS Z 8402(第1部〜
第6部)に従って試験機関間で行った比較によって評価できる。
24
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
利用できる複数の試験機関からのデータ及び同一の試験機関内のデータがまだ多くないため,ISO/IEC
Guide 98-3に記載する手順によってこの規格に関する不確かさを推定した。
次に記載する不確かさは,既存の統計データ,この規格に述べる公差の解析,及び工学的判断によるも
のである。
このように決定した不確かさを次のとおり分類した。
a) 同一の試験機関内で予測されるばらつき及び一連の同一試験中の環境条件の僅かなばらつき(走行ご
と)。
b) 同一の試験機関内で予測されるばらつきであり,年間を通して通常予測できる環境条件及び装置特性
によるばらつきを含む(日ごと)。
c) 環境条件,装置,試験要員及び路面状態も異なる試験機関間のばらつき(試験場ごと)。
報告する場合には,ISO/IEC Guide 98-3で定められる包含確率80 %に対応する拡張不確かさを記載
する。
拡張不確かさの決定に関する情報には,附属書Bを参照する。
注記 附属書BにISO/IEC Guide 98-3に従った解析の枠組みを示す。これはこの規格に対する測定の
不確かさに関する将来の研究に利用できる。
これらのデータを,二つの異なる車両カテゴリに分けて表4に示す。
不確かさを,包含確率80 %として記載する。
データは特定の測定対象に対する結果のばらつきを表しており,製品のばらつきを含まない。
表4−包含確率80 %に対応する測定値の不確かさ
単位 dB
車両カテゴリ
走行ごと
日ごと
試験場ごと
カテゴリM1及び最大車両総質量が3 500 kgを超え
ないM2,並びにカテゴリN1の車両
0.5
0.9
1.4
最大車両総質量が3 500 kgを超えるカテゴリM2,並
びにカテゴリM3,N2及びN3の車両
0.5
0.9
1.4
より具体的な情報が得られるまでは,試験場間での包含確率80 %の拡張不確かさを試験報告書に記載し
てもよい。
9
試験報告書
試験報告書には,次の情報を記載する。
a) この規格の規格番号(JIS D 1024-1)
b) 試験場の詳細,試験路の向き,風速,気温,風向,気圧,湿度などの気象条件
c) ウィンドスクリーンを含む測定装置の型式。
d) 暗騒音レベルの最大値(A特性時間重み付きサウンドレベル)
e) 車両型式,エンジン型式,使用可能な変速比を含む変速装置システムの型式,タイヤのサイズ及びタ
イプ,タイヤ空気圧,タイヤの生産型式,定格出力,試験時質量,出力質量比指数,全長及び基準点
の位置。
f)
試験に使用した変速装置の変速段又は変速比。
g) 加速開始時の車速及びエンジン回転速度,並びに加速開始位置。
25
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
h) ラインPP'及び加速終了時の車速(vPP',v BB')及びエンジン回転速度(n pp',n BB')。
i)
加速度の算出に使用した計算方法。
j)
該当する場合は,車両の補助機器及びその運転条件。
k) 各試験で測定した全ての有効なA特性時間重み付きサウンドレベルの値(車両の測定した側及び試験
時の走行方向別に記載する。)。
26
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
市街地走行における実際の運転状態に基づいた
自動車騒音試験方法の開発の技術的背景
A.1 序文
A.1.1 一般
この附属書は,市街地の騒音状況に関連した技術的な背景,及び市街地全体の騒音状況における1台の
車両の騒音影響を測るために選定された手法について記載している
この附属書は,この規格で定められる試験方法の開発を導くときに用いられた考え方を,確認するため
の情報提供を目的としている。背景情報の裏付けとして,この附属書には実際の実態調査から抜き出した
事例を記載しているが,全てのデータではない。
車両の発生騒音が規制の対象であるので,代表的な市街地走行において計測される車両の発生騒音を評
価するための車外騒音測定法が,用いられる。
この規格で定められる試験法は,代表的な市街地走行における様々な車両の発生騒音の大きさを提供す
る。
測定された発生騒音は,JIS D 8301で定義されているのと同様の特性をもつ路面でのものとみなす。
JIS D 8301の路面は,程度よく施工され,管理された,骨材粒径の小さいアスファルト路面を代表して
いる。参考文献[6]に,JIS D 8301の路面を示しており,この路面は,アメリカ合衆国及びヨーロッパの実
際の路面の範囲に入っている。特別に“静か”に設計された路面では,JIS D 8301の路面より低い発生騒
音となる。したがって,この規格で規定される測定法によって,車両製造業者は車両の発生騒音を管理で
きる。道路交通騒音に対する他の要因は,車両製造業者の管理外となる。これらの要因には,路面,交通
規則,アフタマーケット部品の管理,市街地騒音の監視及び効果的な法的仕組みが含まれる。
A.1.2 新しい試験法の必要性
全ての世界市場で規制の原形となっている現在の試験法は,JIS D 1024:1999に記載されている。
測定は,規定された試験路面(JIS D 8301を参照)で行う。車両は2速及び/又は3速において全開加
速で運転される。マイクロホン位置の10 m手前での進入車速は,50 km/hである。結果としての音圧レベ
ルは,2速若しくは3速のいずれかの変速段の測定結果,又は2速及び3速の試験での測定結果の平均値
である。
この試験法において,多くの国で,規制値は大幅に低減された(ECEではこの20年間で82 dBから74 dB
まで)。しかし,同じ交通状況,同じ時間帯における沿道騒音の低減量は,僅かである。
重要な理由は,この試験法(全開加速,2速及び3速)が,代表的な市街地走行時の車両騒音を十分に
再現していないことにある。JIS D 1024:1999による多くの現在の認証試験では,最小限の溝深さのタイヤ
を使用可能にすることによって,実際の交通騒音と報告された認証結果は,低い相関関係となっている。
代表的な市街地車両騒音の不十分な再現の更なる理由は,JIS D 1024:1999では評価できない車両エンジン
技術及び変速機技術の技術開発によるものである。認証試験におけるJIS D 1024:1999でのこれらの試験条
件では,パワートレーン系の騒音が支配的な状態で車両騒音を測定した結果となる。
この条件は市街地走行ではまれにしか見られず,タイヤ・路面騒音の寄与が小さいので,報告されてい
る認証値は市街地走行における代表的な車両騒音となっていない。したがって,市街地走行における実際
27
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の車両音圧レベルの測定を可能とし,エンジン及び変速機の技術開発に対応できる新たな試験法開発は,
車両騒音の最適化のために改善された基準として,政策側及び自動車製造業者の両方にとって有益である。
A.1.3 交通騒音に対する個々の車両の寄与について
文献[9]は,大都市に住んでいる人々にとって騒音が重要な関心事であることを示している。
人々がさらされる騒音は,隣人,都市音(道路清掃,サイレンなど),航空機,鉄道及び道路交通といっ
た異なる音源が原因である。これらの異なる音源による騒音は,建物の前における最大騒音を抑制するこ
とを目的として,規制の対象となっている。
道路交通騒音による建物の前の騒音は,次に示す異なる要因に依存する。
a) 街の構造(主に居住地と道路との間の距離)
b) 実際の道路交通(車両台数)
c) タイヤ/路面騒音に影響する,一つの要因としての路面
d) 音源と受音点との間の音の経路(騒音伝搬)での抑制(遮音塀,防音など)
e) 次の要因で決まる運転手の行為
− 制限速度(交通規則),
− 交通密度,
− これらの状況の下での,音源としての車両挙動。
− 運転目的(通勤通学,娯楽,商用など),
− 交通規則の適用,及び,
− 道路の配置(交通信号,曲がり角など)。
多種多様な運転状態があるため,一つの“代表的な”運転状態を選定することは難しい。実際の挙動を
再現するための車両騒音の測定法は,実際の運転状態を考慮するのがよい。
A.1.4 これまでの道路交通騒音の調査による情報
実際の運転状態が,全て,道路交通騒音に対して同じ影響をもつとは限らない。例えば,誰も騒音に悩
まされないような郊外の道路における運転状態がある。道路交通騒音のどのような状況が,居住者にとっ
て最も迷惑になるのか。
この疑問に対する答えは,文献[10]に示されており,表A.1を参照。
28
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−居住者はどのような場所で自動車交通騒音によって迷惑を受けているか
道路の種類
制限速度
km/h
不快を感じる人の数
人
不快を感じる人の割合
%
道路延長
m
道路延長の割合
%
自動車専用道路
80〜120
1 145
2.0
11 250
6.9
住宅街の道路
30
13 501
23.1
27 060
16.6
主要道路
50
42 704
73.0
109 233
67.1
主要道路
60
583
1.0
2 130
1.3
幹線道路
70
139
0.2
3 390
2.1
幹線道路
80
407
0.7
4 500
2.8
幹線道路
100
21
0.0
5 300
3.3
総数
−
58 500 a)
100
162 863
100
注記1 中規模都市における道路総延長及び騒音の影響を受ける居住者に関する各種道路カテゴリの割合(98年
12月からのFIGE調査)。
注記2 不快に感じている人の割合は,高加速度中の発生騒音下では上表に対し3 %増加する。
注a) 居住者総数(220 000人)に対する割合は,26.6 %。
注記 表A.1及びこの附属書の他の全ての図は,文献から直接コピーしたものである。したがって,
量及び単位は,この規格の表記方法に,必ずしも統一されていない。
種々の通り沿いの居住者の回答は,主に次の状況で騒音苦情が起こることを示す。
− 市街地の主要道路沿い。
− 車両が加速状態で移動しているとき。
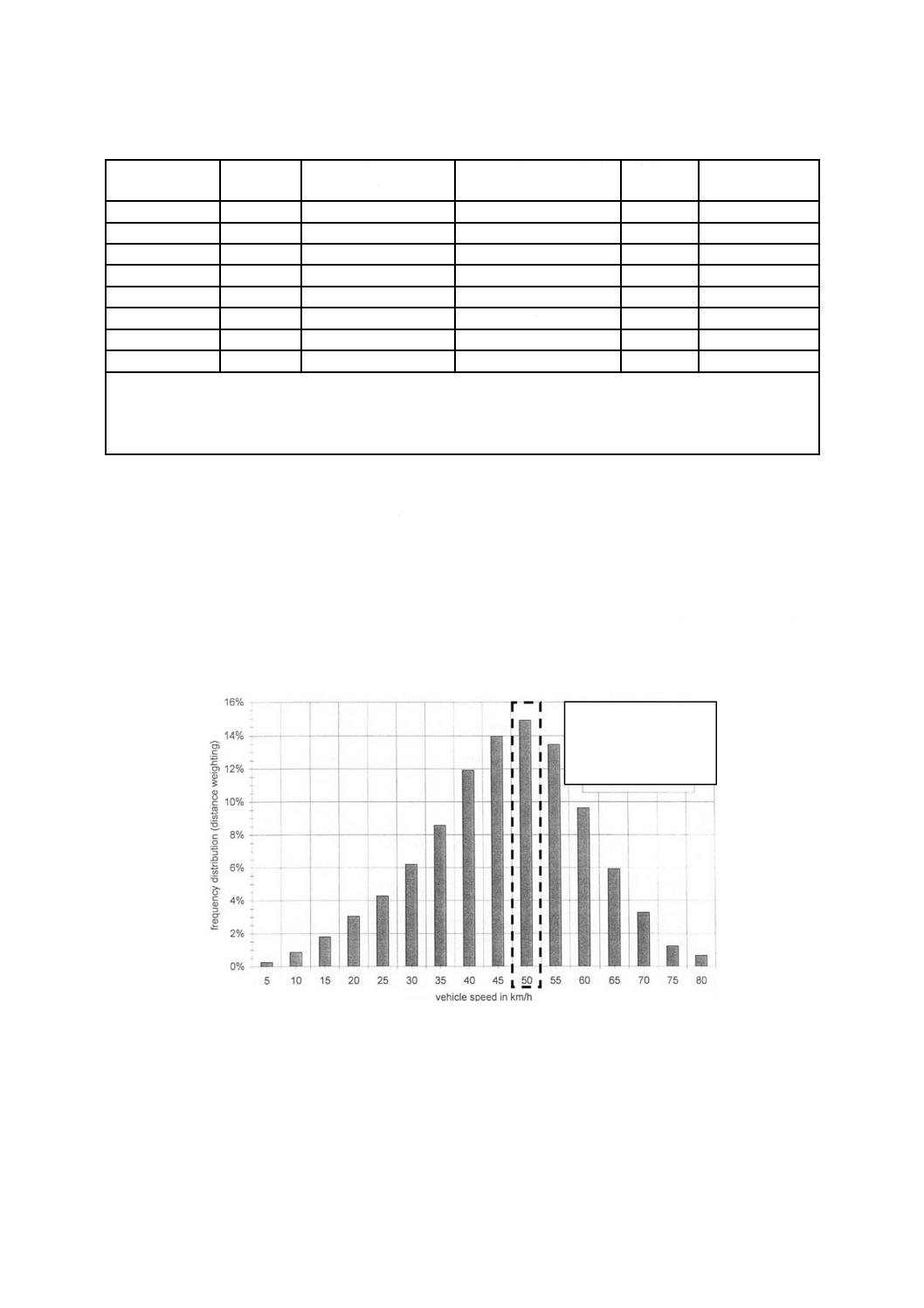
文献[9]の研究の図A.1に示すように,これらの主要道路(制限速度が50 km/hの道路)の平均車速は,
50 km/hである。
図A.1−主要道路において計測された市街地走行時の車両速度
これらの統計に基づいて,主要道路において最もうるさい実際の状況を代表する条件で,50 km/hでの
試験を実施することが決められた。
市街地主要道路,
制限速度=50 km/h,
加速度>0 m/s2
29
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.2 カテゴリM1及び最大車両総質量が3 500 kgを超えないM2,並びにカテゴリN1の新しい試験方法
を開発する際に使われた概念
A.2.1 一般
新しい試験方法の開発において最初の主要な作業は,市街地走行時の運転の挙動を把握することであっ
た。
この作業を経て,新しい試験方法が決まった。それは,次の要件を調整したものである。
− 典型的な市街地走行における,発生騒音の累積頻度90 %値の計測(代表性,再現性)。
− 試験は,上記の要件を考慮して走行は簡便でなければならない(実用的)。
− 試験は,全ての種類の車両に適用できるものでなければならない(技術的な中立性)。
− 試験は,性能要件だけで規定されなければならない(設計要件ではない)。
A.2.2 市街地走行時の車両の計測のための技術的な概念
A.2.2.1 一般
車両騒音は,主に次の三つの車両の要素に依存する。
− 車両速度
− 車両の加速度 (エンジン負荷)
− エンジン回転速度 (内燃機関だけ)
タイヤ/路面騒音は,車両速度及び車両加速度によって決まる。三つの要素のうち,車両速度及び車両
加速度の二つは,運転状態を示す。車両の要素は,車両の性能及び交通状況だけでなく,運転者の意図(入
力)にも依存する。
第三の条件であるエンジン回転速度は,付加的な要素であり,車両加速度及び車両速度を達成するため,
運転者又は自動変速装置の場合,そのコンピュータによって制御される。 このように,市街地走行調査で
決めなければならない独立した要素は,次のとおりである。
− 車両速度
− 車両加速度
この情報を得るために,実際の都市走行の調査は,次の項目を含んで実施された。
a) 市街地走行時の車両データの記録。
b) 加速状態の抽出。
c) 最大加速度(最も騒音が高い状態)の車両速度に対する関数の同定。
d) 50 km/hにおける最大加速度(最も騒音が高い状態)の同定。
e) 対応するエンジン回転速度の同定。
f)
全ての車両に対して,市街地走行時の挙動は,主に出力質量比指数(PMR)によって表現できる車両
性能に依存すると仮定する。次にPMR及び最も高い市街地走行時の加速度による回帰分析を行い,
対応するエンジン回転速度を記録する。
手動変速機車では,エンジン回転速度は,運転者によって“加速余裕”(すなわち,実際の加速度と可能
な加速度との比率)をもって使われる。
エンジン回転速度は,“技術的”又は“設計上”の要素であるため,加速能力,すなわち,市街地の運転
状態における全開加速度awotに置き換えた。
運転者の挙動を記載するこの方法は,数多くの異なるエンジンの種類(ガソリン,ディーゼル,ロータ
リ,ハイブリッドなど)に適用できる。
車両の追加試験によって,awotとPMRとの間の相関関係が求められた。
30
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この情報は,運転者が使用可能な出力を制御する方法を規定するために必要であり,手動変速機車のた
めにだけ必要である。
自動変速機車では,次の要素は,自動的に制御される。
− 50 km/h
− 市街地走行時の加速度
− 手動変速機車に対して,awotを達成できるエンジン回転速度条件
自動変速機車は,手動変速機車の一部に含まれる。
実際に,市街地走行では,自動変速機車は,手動変速機車と同等以下の発生騒音である。
A.2.2.2 車両挙動の記録
実際の市街地走行についてデータを収集するために,61台の車両が都市内で運転され,それらの挙動が
記録された。
これらの車両には,欧州及び日本の全ての車種(M1,N1,N2及び19トンまでのN3が1台)が含まれ
ている。
エンジン出力は,40 kW〜440 kW,PMRは,12.7〜380。
手動変速機車(52台)と自動変速機車(2台のCVT車を含む9台)との比率は,ほぼ欧州の市場を代表
している。
車両は,欧州及び日本の八つの異なる都市で運転された。
運転要素(図A.2参照)を記録するために選ばれた路線は,異なる速度制限の異なる種類の道路を代表
している。
記録の間,運転者は交通流の中で通常の運転挙動を維持した。
記録時間は,約2時間の走行であった。
各種類の道路における移動走行は,道路延長と交通量との積に比例しており,そのことは沿道の移動し
ない観測者に対してもほぼ同じ事象であることを保証している。
図A.2−運転要素の時系列データ
時間履歴
車速
車速
加速度
変速段
使用しているエンジン出力
31
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
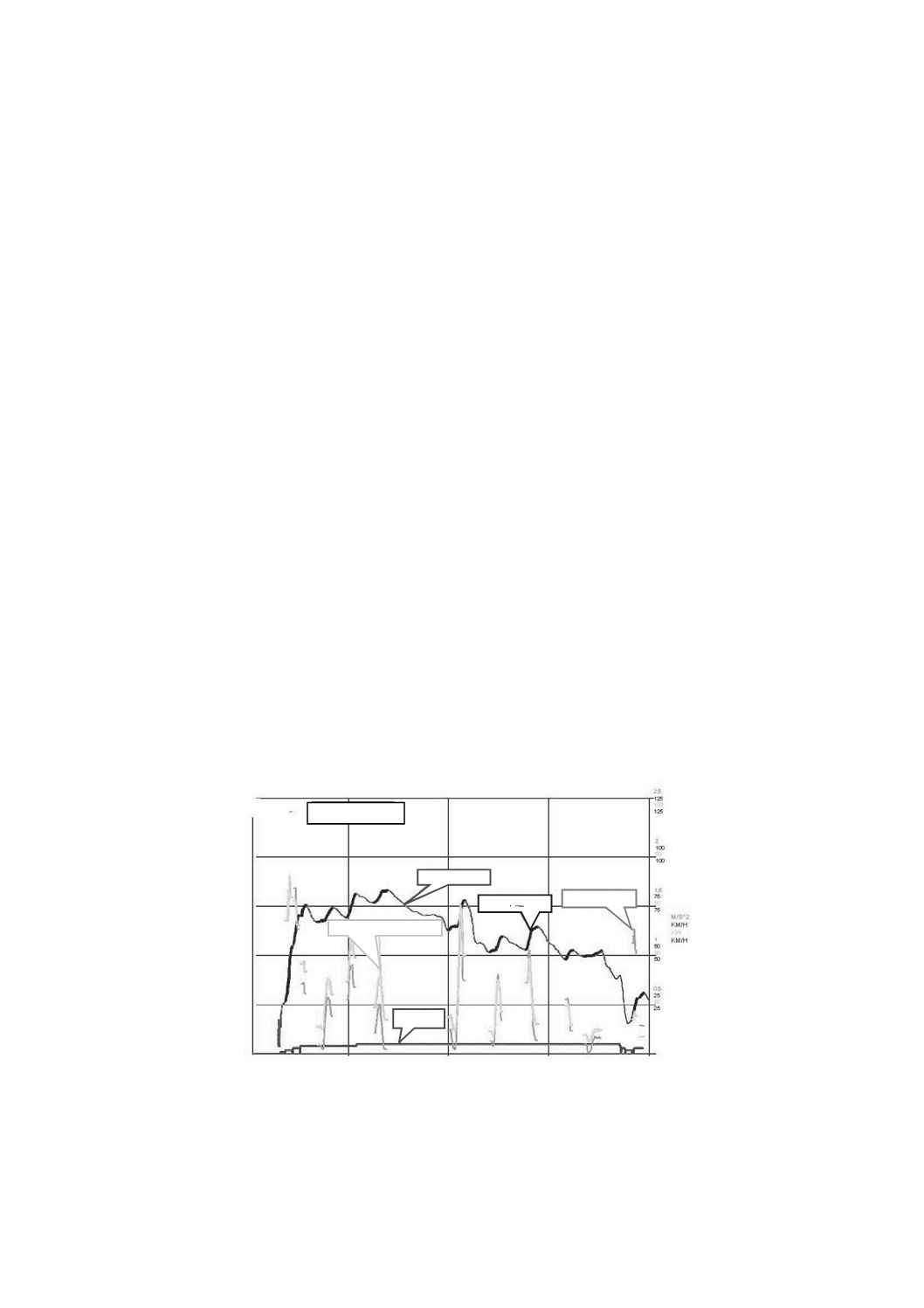
A.2.2.3 時間事象の分析
初めに,走行データから走行中の加速度が求められた。
評価値として,2秒間を超える加速区間の平均加速度が,計算された。
各2秒間の加速状態の最大値(最大加速度amax)は,そのときの車両速度(va max)とともに,抽出され
た。
これは,図A.3に示す方法によって実施された。
市街地走行時の車両運転状態の時系列データ
図A.3−最大加速度の定義
各々の加速度の最大値amaxは,va max及び変速比とともに,一つの事象(シングルイベント)として保存
された。
A.2.3 実際の走行データの統計的分析
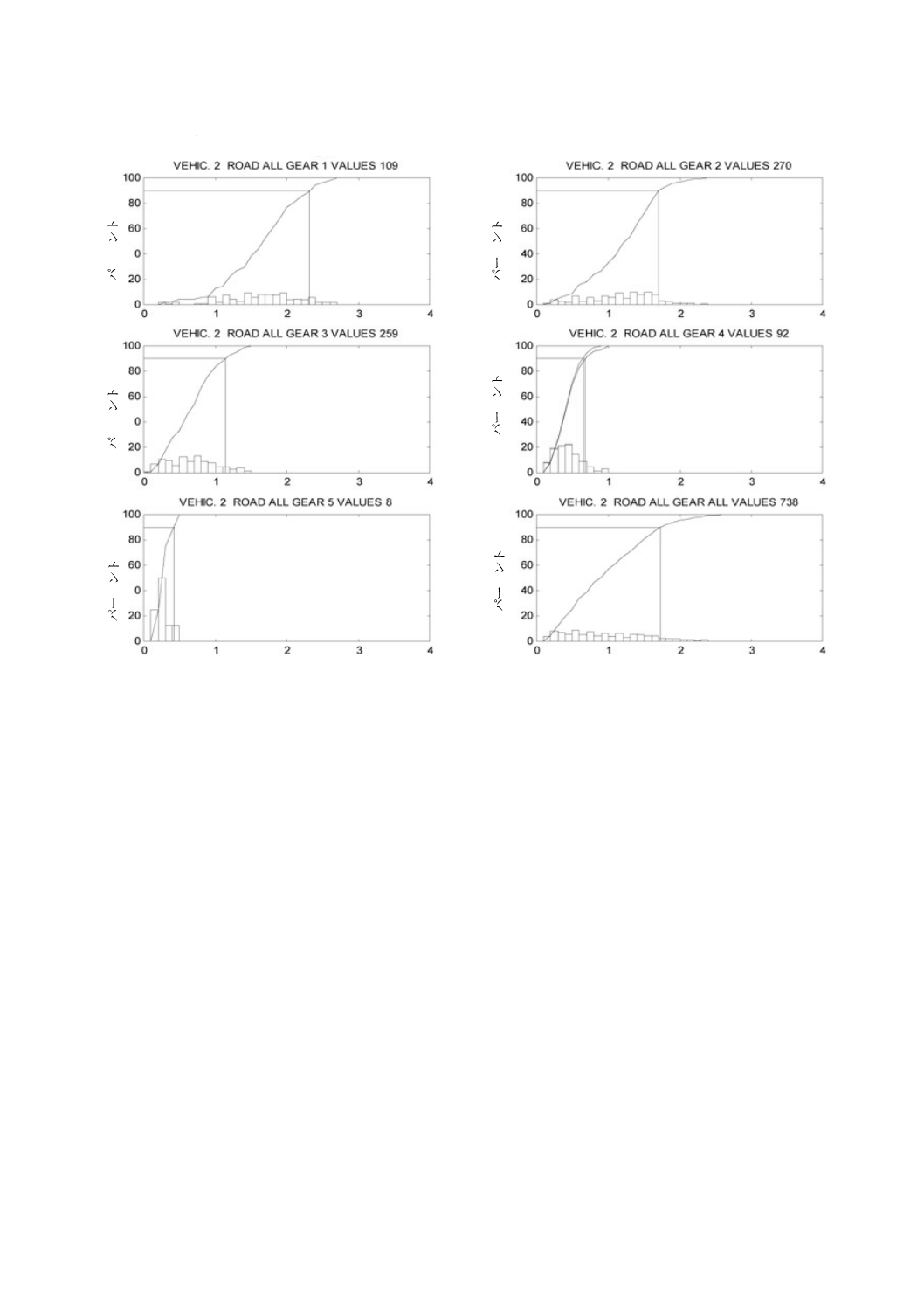
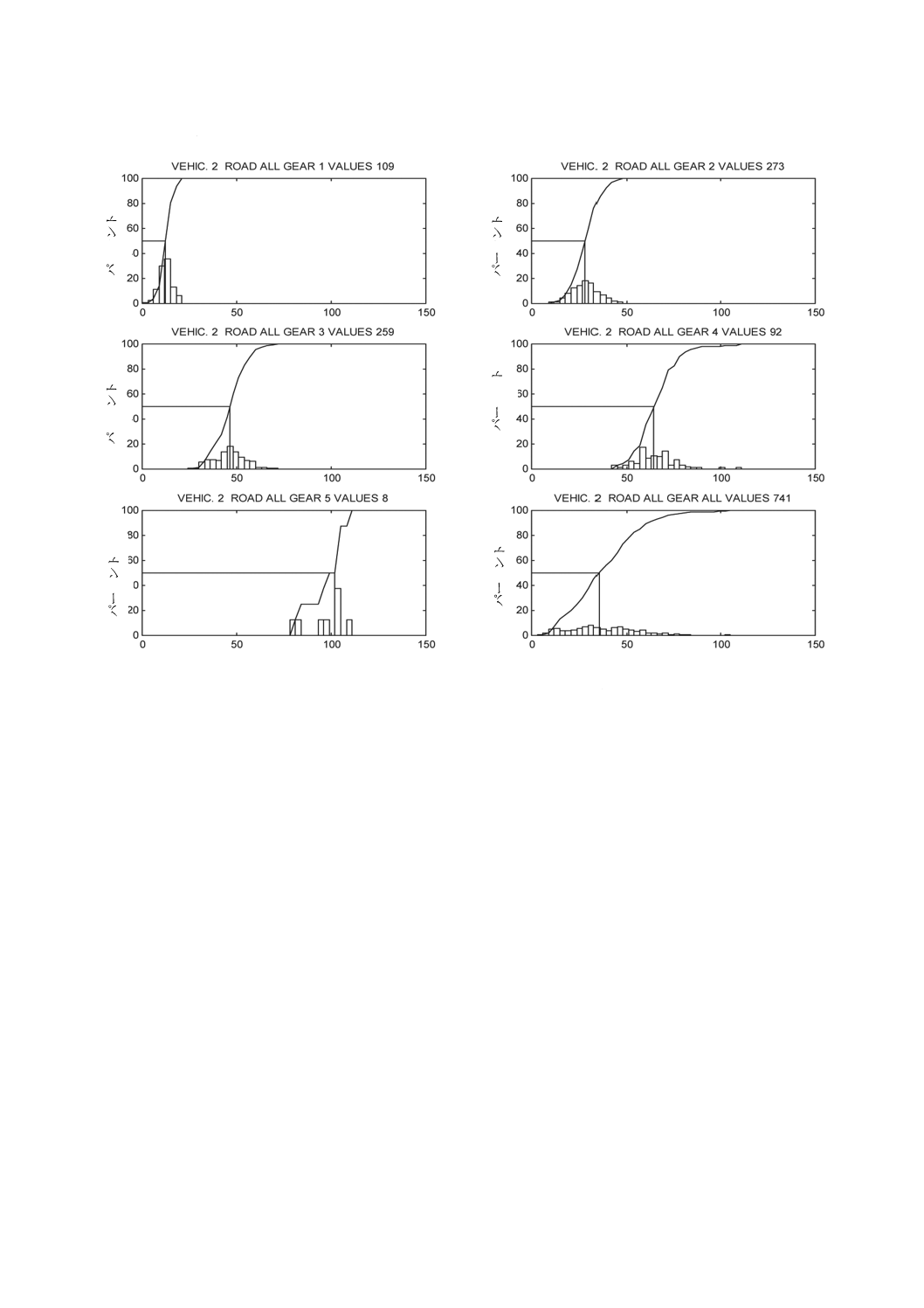
A.2.3.1 1台の車両の一次元分析
図A.3に示す最大加速度amax,及びこの最大加速度が発生する車速va maxは,各変速段ごとの度数分布及
び累積頻度分布として表される。
ピーク加速度については図A.4,車速については図A.5を参照する。
各変速比及び全道路について,最も頻度の高い車速(累積頻度50 %)va max 50でのピーク加速度amax 90の
累積頻度90 %,及び最大速度(累積頻度90 %)va max 90でのピーク加速度amax 90の累積頻度90 %を検討す
る。
加速状態ごとに次のパラ
メータを検討する。
・Amax
・VAmax
(1車両−1ギヤ−1加速状態)
車
両
加
速
度
車
両
速
度
32
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.4−最大加速度の度数分布及び累積頻度
2000年6月27日 ACPEAK:ピーク加速度。90 %フラクタル計算
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
ACPEAK (m/s2)
ACPEAK (m/s2)
33
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.5−最大加速度va maxでの車速の度数分布及び累積頻度
1台の車両に対する上記分析を,各試験車両について実施した。
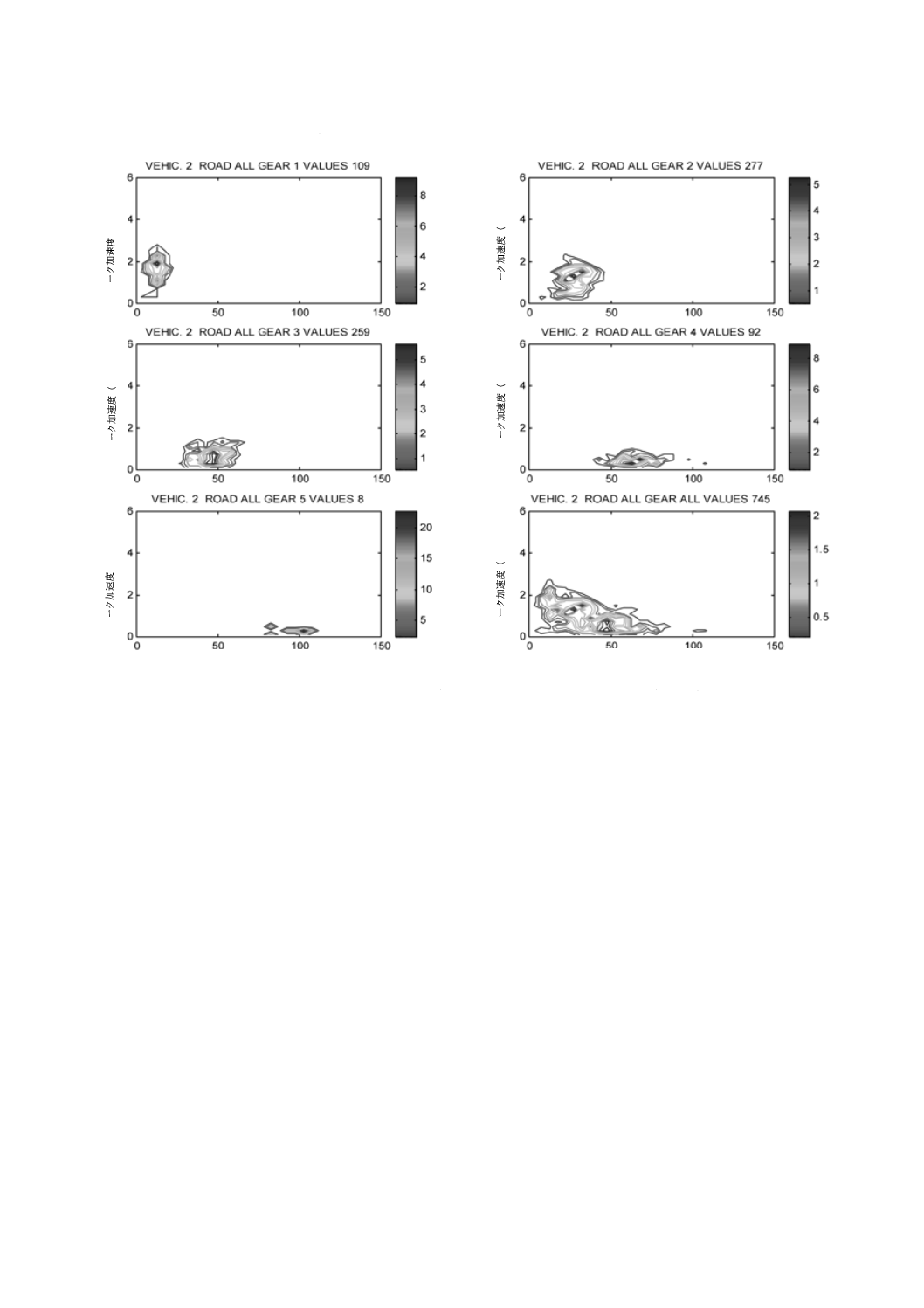
A.2.3.2 二次元分析
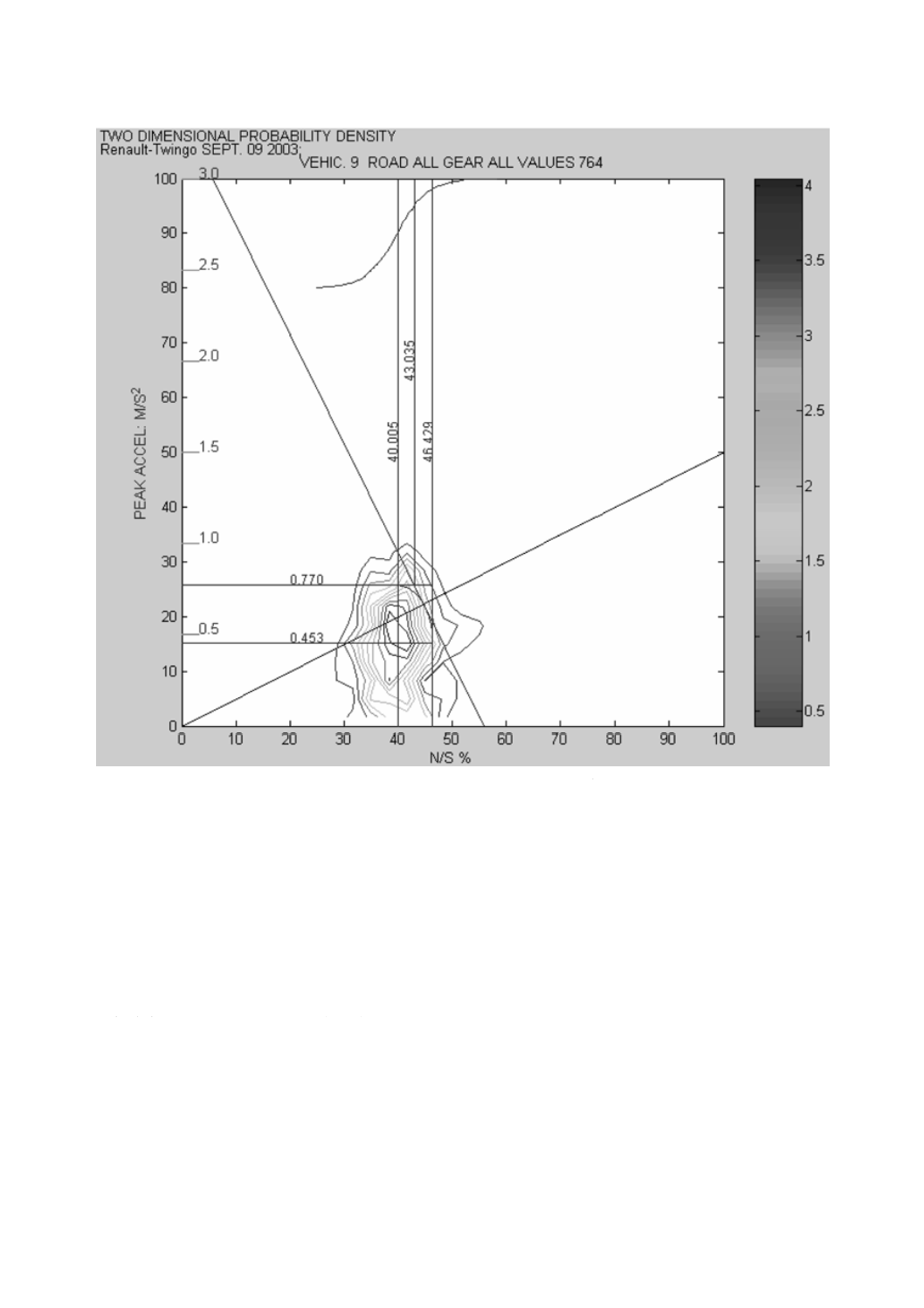
これらの結果を,個々の事象amax及びva maxの確率密度の二次元図に示す。図A.6を参照する。
この図は,各変速比ごと及び全変速比分の確率密度を合わせて示している。
2000年6月27日 ACPEAK:ピーク加速度の車速。50 %フラクタル計算
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
パ
ー
セ
ン
ト
VL(km/h)
VL(km/h)
34
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.6−車両番号2の各変速比ごとの二次元確率密度(amax及びva max)
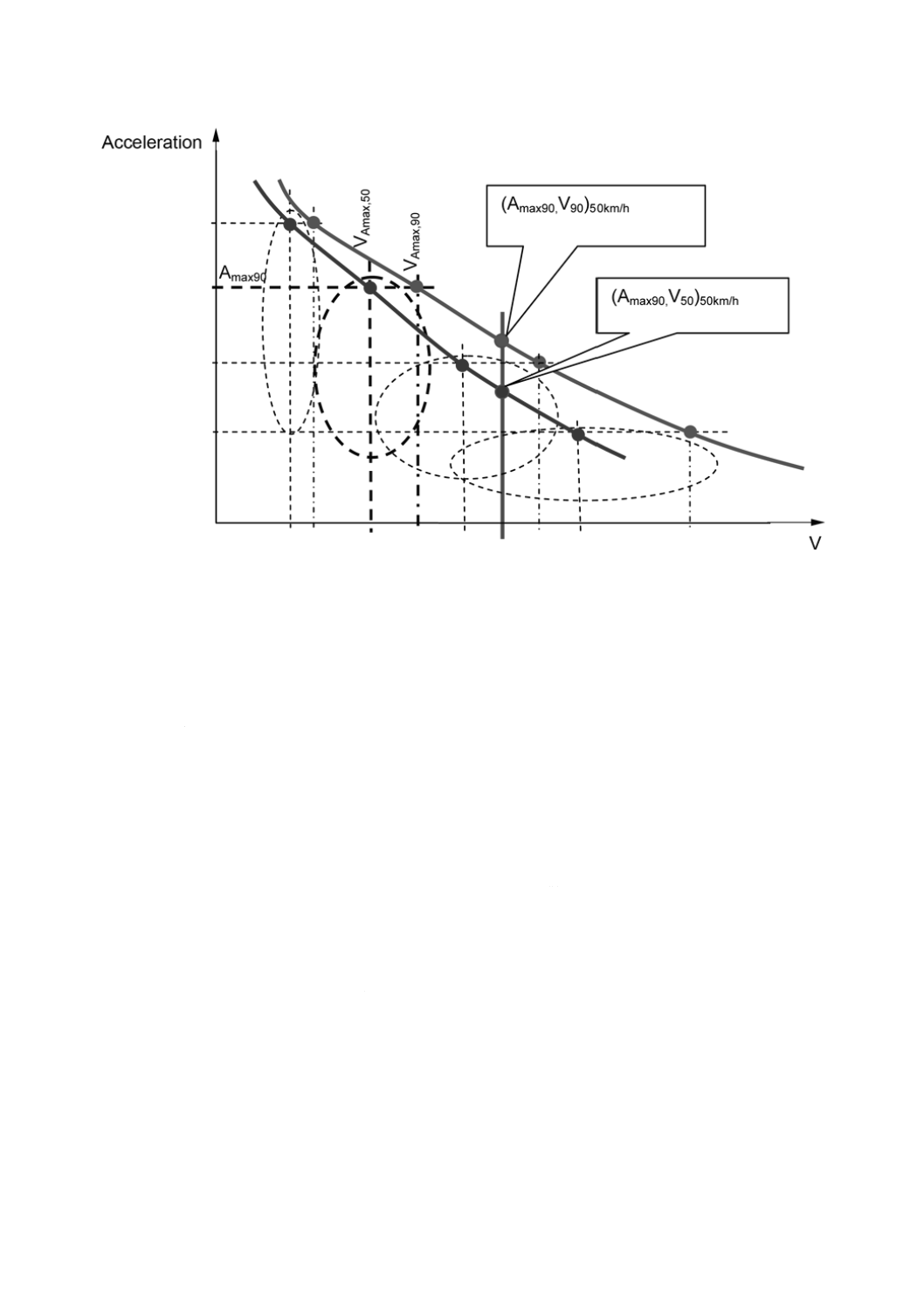
この図から,各変速比ごとに加速度の最大値が分かる。全変速比分のデータを示した最後の図から,最
大加速度は,車速に依存し,車速の増加とともに減少していることが分かる。
図A.4及び図A.5からの値を使用して,最後の図の中に各変速比に対応する点(amax 90,va max 50)を記入
することができる。この結果を図A.7に示す。この図の中には図A.6の模式図を含む。(amax 90,va max 90)
の点も,変速比ごとに記入する。
2000年7月4日:二次元確率密度 VACCPEAK-ACPEAK
ピーク加速度(
m
/s
2
)
ピーク加速度(
m
/s
2
)
ピーク加速度(
m
/s
2
)
ピーク加速度(
m
/s
2
)
ピーク加速度(
m
/s
2
)
ピーク加速度(
m
/s
2
)
VL(km/h)
VL(km/h)
35
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.7−50 km/hの補間
各変速比に対応する点(amax 90,va max 50)を通る曲線によって,典型的な走行での車両加速度の上限を車
速の関数として表される。しかし,図中の下側の曲線は,まだ走行中に観測される加速度の最大値以下で
ある。最大値を表す加速度曲線を求めるため,点(amax 90,va max 90)を通る曲線も検討する。この曲線は,
明らかに最大加速度を超えている。したがって,上限値は二つの曲線の間にある。
二つの曲線を50 km/hで補間することによって,車速50 km/hの累積頻度50 %での加速度の累積頻度
90 %,及び車速50 km/hの累積頻度90 %での加速度の累積頻度90 %を求めることが可能となる。50 km/h
での加速度上限値は,これら二つの点の間にある。
A.2.4 50 km/hでの最大加速度及びエンジン回転速度
各変速比において,車速はエンジン回転速度nに対応する。定格エンジン回転速度Sに対して正規化さ
せるために,全てのエンジン回転速度をエンジン回転速度と定格エンジン回転速度との間の比率として表
現し,n/Sとする。同様の補間手法によって,50 km/hでのn/Sを得ることができる。
この補間は,次のように実施され,図A.8が得られる。
− 加速度は,図A.4から得る。
− 車速は,図A.5から得る(累積頻度50 %又は累積頻度90 %)。
− エンジン回転速度は,変速比から算出する。
図A.8は,図A.7と同じ目盛を使用している。横軸は車速,右目盛は加速度及び左目盛はエンジン回転
速度である。
36
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
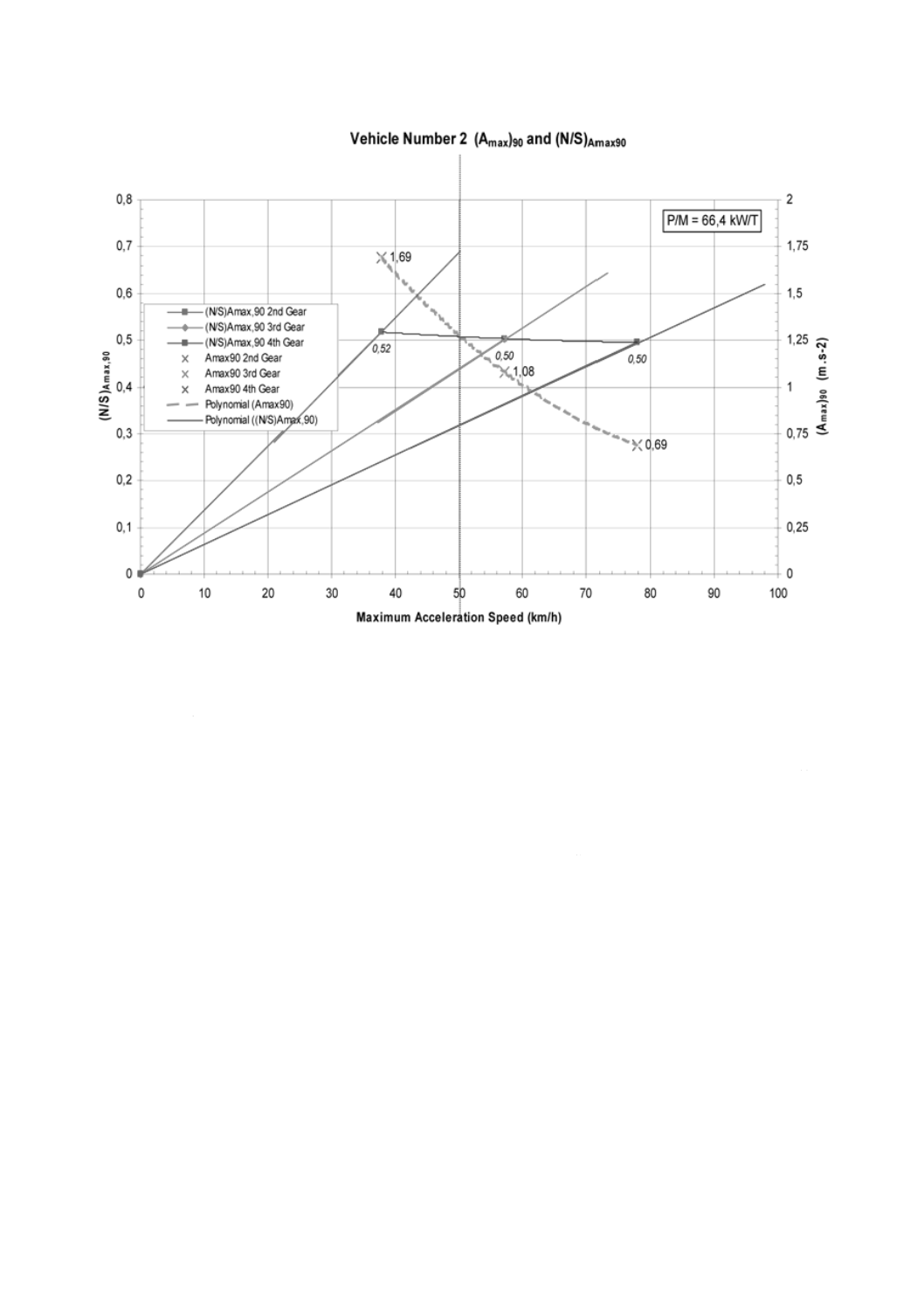
図A.8−車両番号2についての変速比間の補間[amax 90 = f(v),n/S(amax)]
この段階では,市街地走行での最大騒音の発生状況の正確な説明手法は,不明確である。
A.2.5 エンジン回転速度の関数としての加速度
図A.8の詳細結果を見ると,amax 90では,エンジン回転速度は一般的に変速比に依存していないことが
分かる。もちろん,amax 90条件では,車速は各変速比で異なる。この分析の結果,50 km/hでの“平均的な
挙動”を得るため,全変速比の結果を“統合する”ことが可能であるという考えに至る。これを次のとお
り実施する。
− ピーク加速度は,変速比ごとの比率(amax 90,50 km/h)/(amax 90,va max)を使用して,“要約”される。
− エンジン回転速度は,va max及び対応する変速比を使用して計算する。
この補間は,車速が50 km/hである場合,同じエンジン回転速度で発生する加速度を与える。
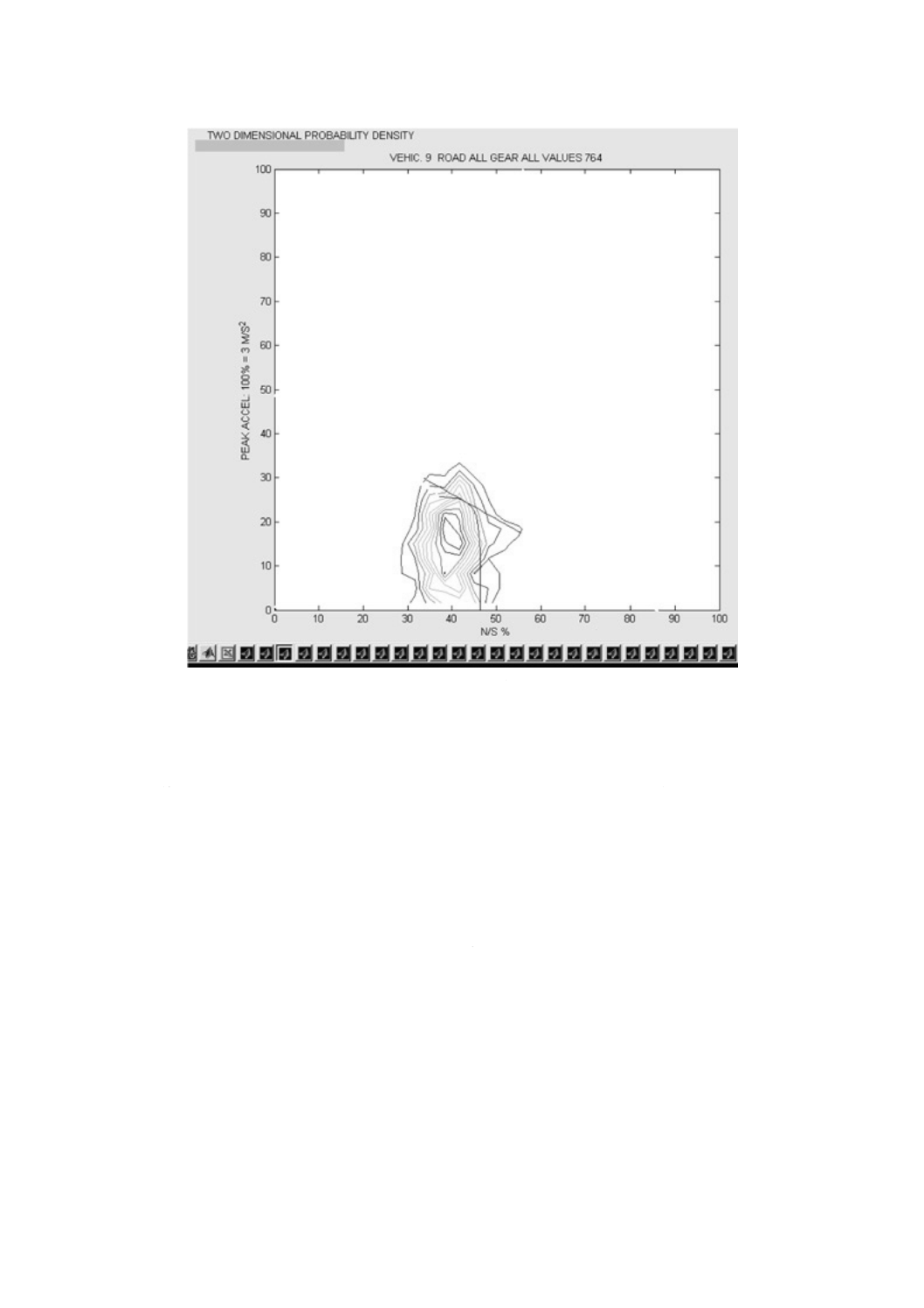
これによって,図A.9の二次元図が得られる。市街地走行における騒音の発生状況がこの図から分かる。
37
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.9−50 km/hでの二次元確率密度a =f(n/S)
A.2.6 試験路での騒音特性
部分負荷時の車両騒音を検討するため,少なくともエンジン負荷及びエンジン回転速度の関数として,
騒音が直線的に変化するという仮説を立てる必要がある。この仮説を基に,部分負荷時の車両音圧レベル
は,全開加速時の騒音と定常走行時の騒音とを用いて補間される。
加速度だけが既知であるため,各車両の加速能力(全開加速時)が必要である。この値は,異なる車速
及び全変速段について,試験路上で測定される。結果を図A.10に示す。
加速度は,測定点前から始めた安定した加速状態で評価する。様々な開始車速によって,測定点での異
なる車速が得られ,車速の関数として加速度曲線を描くことができる。
それらの曲線から,50 km/hの値を読み取り,ai /awot iによって定義される部分負荷率の計算に使用する。
38
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.10−全開加速時の車両加速度(awot) = f(v)
音圧レベルもまたJIS D 8301の試験路上で測定する。その測定結果は,定常走行及び全開加速走行時の
マイクロホン前での車速,変速段及びエンジン負荷の関数として示される。その典型的な結果を,図A.11
に示す。
図A.11−変速段,スロットル及び車速の関数としての車両音圧レベル
図A.11から,50 km/hでの車両の加速度及び音圧レベルが,変速段ごとに決定される。図A.12に示すと
おり全開加速走行及び定常走行の測定結果を補間することで,iso-noise曲線を得ることができる。この
車両音圧レベルの作図,l = f (v, i, kP)
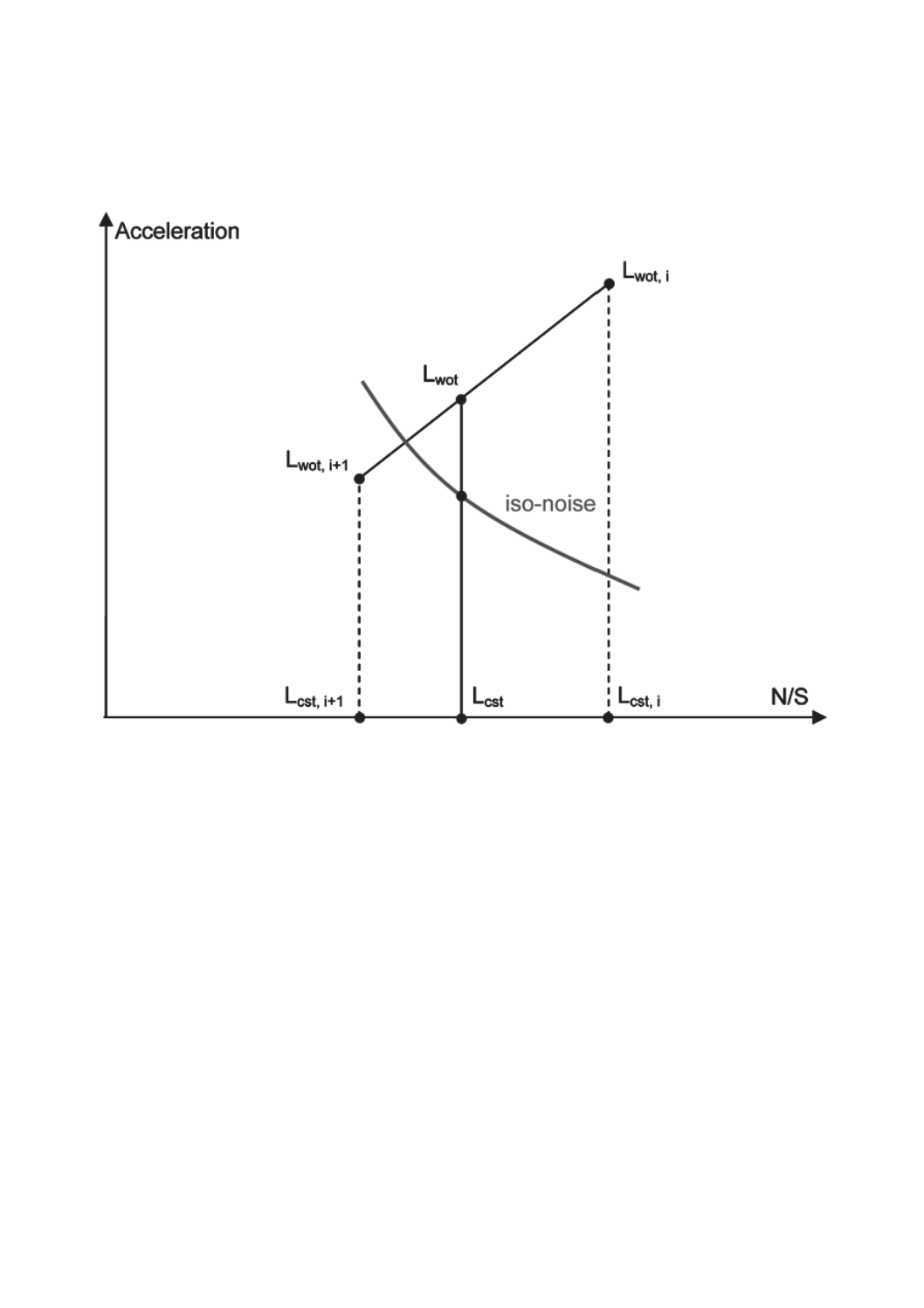
39
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
iso-noise曲線は直線によって近似でき,全開加速音圧レベル及び定常走行音圧レベルにおける勾配によっ
て定義される。
図A.12−等騒音曲線
この直線を図A.9中に記載し,図A.13に示すように,加速しているときの事象の90 %以下となるまで,
平行移動する。この線より下のあらゆる運転事象は,騒音が低く,線の位置によって,音圧レベルの累積
頻度90 %が規定される。累積頻度90 %の加速度が,等騒音線に接する交点は,累積頻度90 %の騒音での
エンジン回転速度を示す。
注記 図A.12において使用されるiso-noiseは,等騒音線に相当する。
40
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.13−50 km/hでの(n/S)L90, a90の定義
騒音の累積頻度90 %及び加速度の累積頻度90 %での点n/Sによって,“最大”加速度での“最大騒音”
の状況が示され,市街地における最大騒音の現実的な状況として記録された。この計算は,市街地走行中
の車両性能データベース作成用の試験車両ごとに実施された。
A.2.7 市街地走行中の平均的な挙動
上記手順によって,52台の手動変速機車両による結果を分析した。さらに,別の9台の自動変速機の車
両も分析した。これらの車両について,50 km/hでの累積頻度90 %のピーク加速度及び対応するエンジン
回転速度n/S並びに出力質量比(PMR)の関係を調べた。12 < (PMR) < 400 に対して対数回帰を行った。
その結果を図A.14及び図A.15に示す。
41
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.14−52台の車両の回帰曲線aurban = f(IPMR)
図A.15−最大加速度及び50 km/hでのエンジン回転速度−52台の車両の出力質量比指数(PMR)に応じ
た回帰曲線(累積頻度90 %の音圧レベル,累積頻度90 %の加速度,及び50 km/hでのn/S)
これらの図から,次のことを結論付けることができる。
車両クラスM1,N1,N2及びN3:(Amax) L90,(最大加速度の累積頻度90 %)
(自動変速機及び手動変速機の車両)
(Amax)90, N/SL90(52台)手動変速
(Amax)90, N/SL90(9台)自動変速
対数((Amax)90, N/SL90(9台)自動変速
対数((Amax)90, N/SL90(52台)手動変速
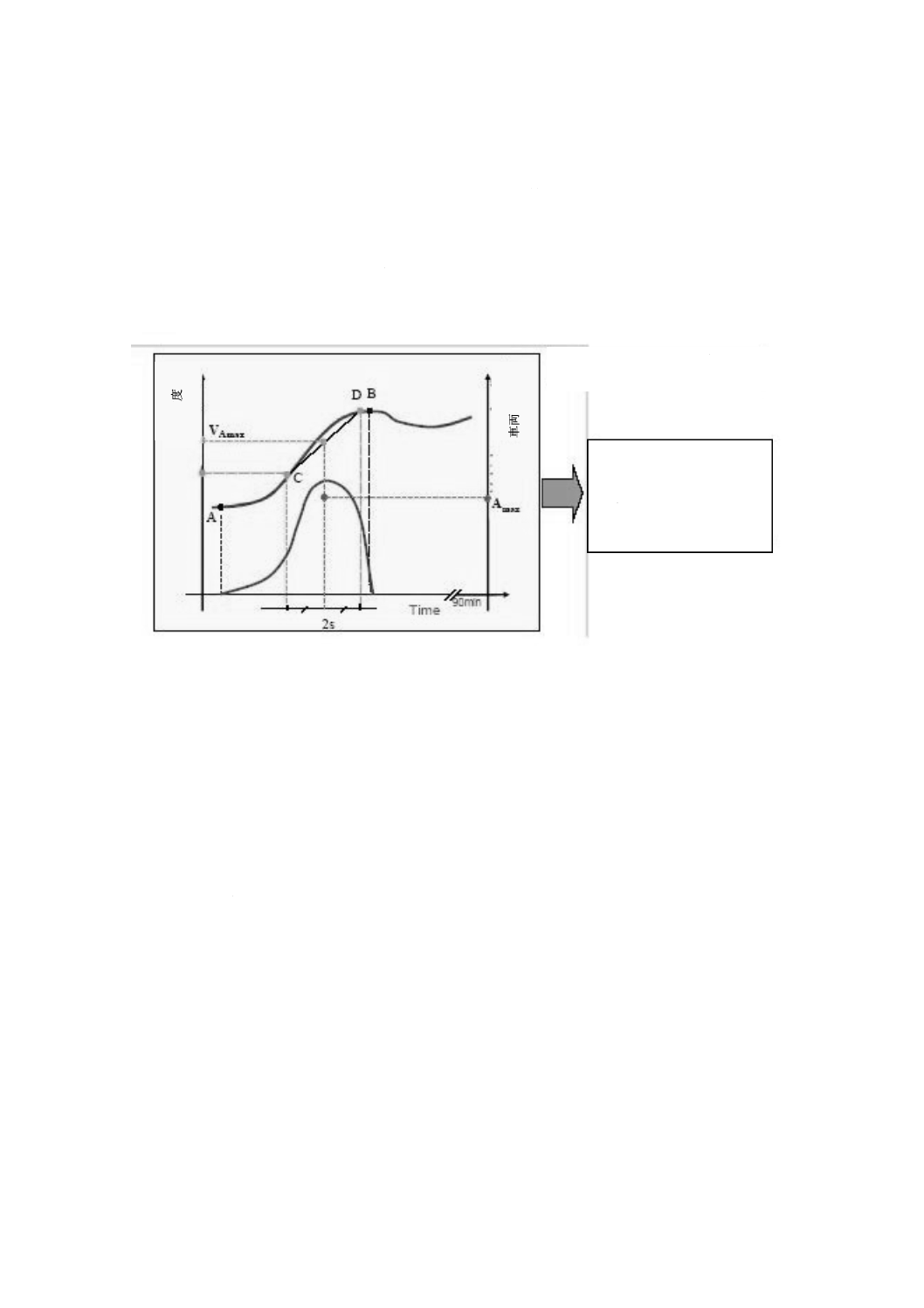
車両クラスM1,N1,N2及びN3:(N/SL90)Amax, VPP = 50 km/h,最大加速度に対するエンジン回転速度
(自動変速機及び手動変速機の車両)
N/SL90 2003/09/15の状態(52台)手動変速
N/SL90 2003/09/15の状態(9台)自動変速
42
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− ピーク加速度及びエンジン回転速度で表される市街地走行の挙動は,出力質量比(PMR)と良い関連
がある。
− 市街地走行のピーク加速度は,PMRとともに増加する。
− ピーク加速度が発生するエンジン回転速度は,PMRとともに減少し,車速との関連性は低い(30 km/h
<車速<60 km/h)。
これらの結論は,実際の交通における車両挙動の予想と一致する。運転者は,車両の加速能力によって
交通流を維持する。交通流を維持するための車両加速能力の割合は,出力質量比の低い車両は高く,出力
質量比の高い車両は低い。結果として,出力の低い車両は,高いエンジン回転速度を使用し,出力の高い
車両は,低いエンジン回転速度を使用する。自動変速機車両の結果は,市街地走行時の加速度及びエンジ
ン回転速度が低いことを示す。ワーストケース(最大)の音圧レベルは,手動変速機車両の結果で決まる
ので,自動変速機車両は,統計曲線に含まれていない。
A.2.8 全開時の加速度
A.2.8.1 個々の車両の分析
手動変速機車両については,エンジン回転速度は決まらない。それは,運転者の選択する変速段によっ
て決まる。典型的な運転者は,車両の利用可能な,出力(PMR)によって決まる加速の余力を保持しよう
とする。典型的な市街地走行条件下での加速能力を決定しなければならない。
JIS D 8301に適合する試験路で,変速段iごとに,20 mと車両全長との合計の距離において,全開加速
の測定を実施した。
車速の関数としてawot iを記録した。結果を図A.10に示す。
これらの曲線から,50 km/hでの値を得た。
次に,(n/S)a 90の統計値を使用して,変速段iと変速段(i+1)との間の補間係数knを式(A.1)によって算出し
た。
(
)
(
)
1
1
90
+
+
−
−
=
i
i
i
a
n
S
n
S
n
S
n
S
n
k
······························································· (A.1)
最終的に,図A.16に示すとおり,累積頻度90 %で,それに対応する無次元のエンジン回転速度を用い
て,50 km/hにおける全開加速時の加速度を式(A.2)によって算出した。
)
(
)1
(
wot
wot
)1
(
wot
50
wot
+
+
−
×
+
=
i
i
n
i
a
a
k
a
a
············································ (A.2)
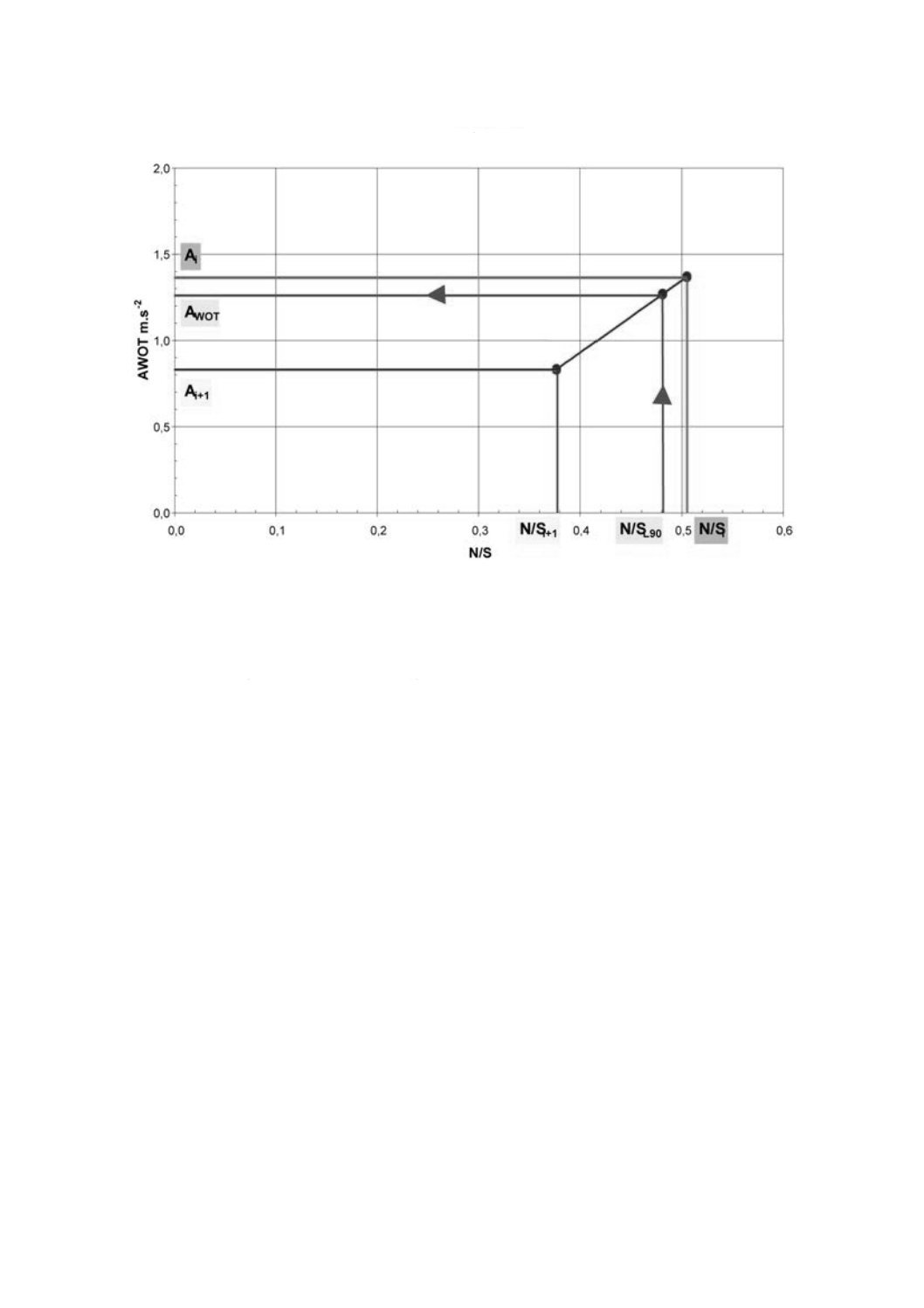
43
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.16−全開時の加速度awot 50の決定
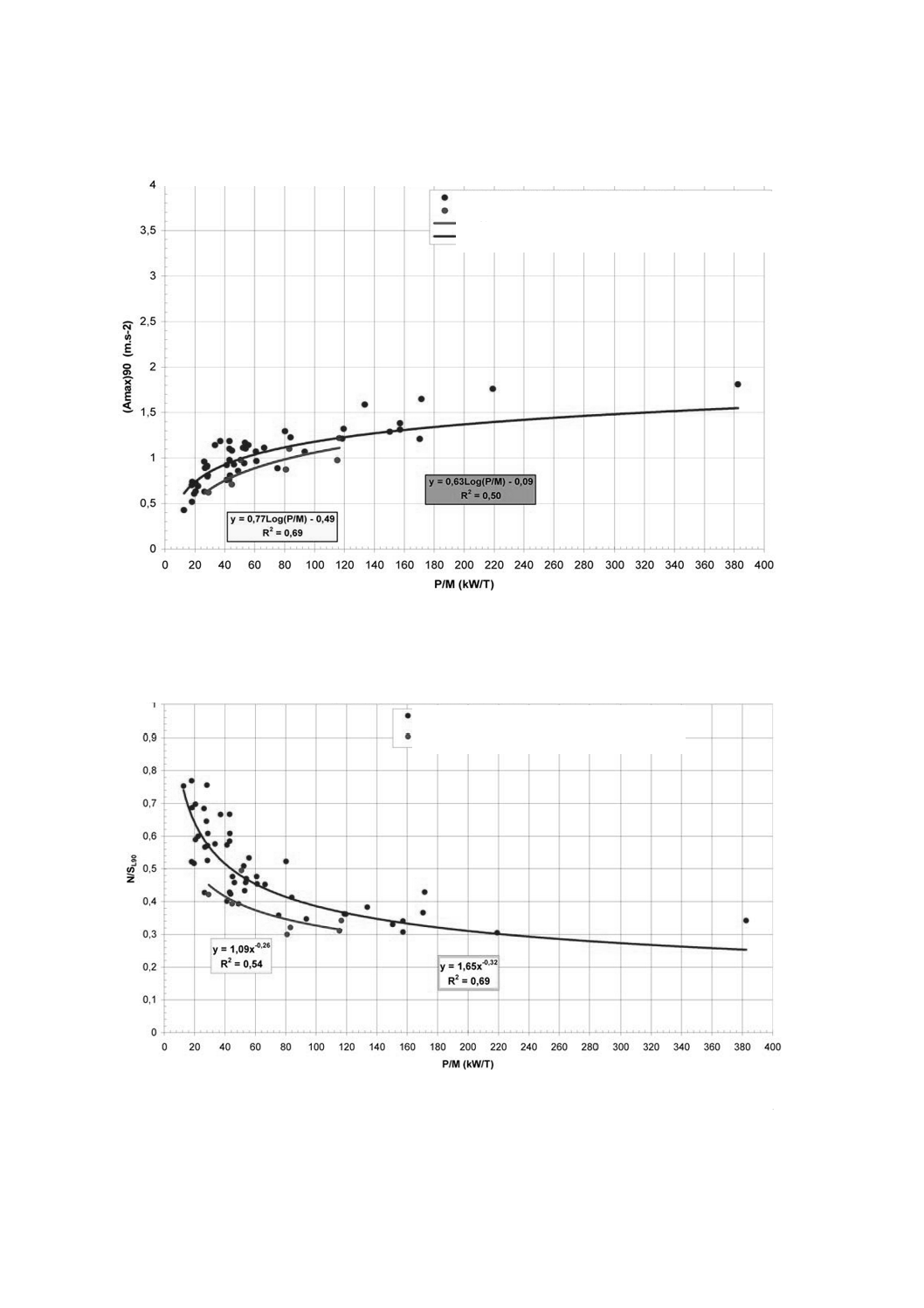
A.2.8.2 全開加速度の統計分析
127台の車両を用いて測定を行った。これらは,前述の実際の運転挙動調査に使用された車両と異なる。
車両個々のawot 50のデータによる対数回帰曲線は,出力質量比の関数としてのawot refを示し,20<PMR<
220の範囲で図A.17に表す。
車両 27
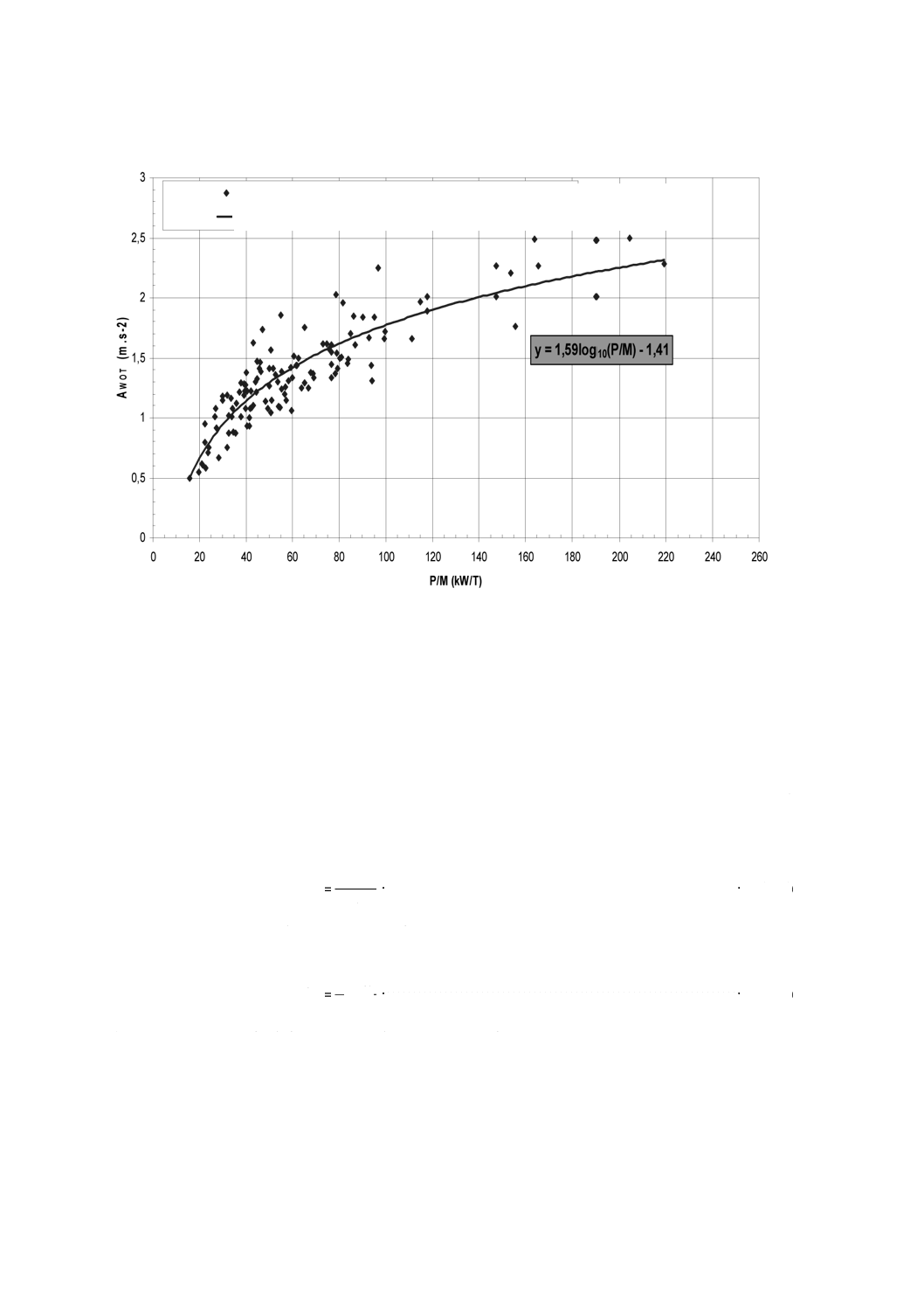
44
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.17−出力質量比の関数としての回帰曲線awot ref(127台の車両)
市街地走行で測定したピーク加速度のときと同じエンジン回転速度(n/S)L90での全開加速度awot refは,出
力質量比と共に増加する。
また,市街地走行のピーク加速度のときと同じエンジン回転速度(n/S)L90での全開加速度awot refは,ほと
んどの場合,市街地走行のピーク加速度よりも大きい。すなわち,awot ref>amax 90である。
A.2.9 部分加速係数(kP)
変数(1−kP)を,同じエンジン回転速度(n/S)L90及び車両速度で,車両の全開加速度awot refに対する車両の
市街地走行のピーク加速度amax 90の比として,式(A.3)で定義する。
(n/S)L90での車両速度に対して次のとおりである。
ref
wot
90
max
P
1
a
a
k=
−
········································································ (A.3)
車両速度が50 km/hの場合,50 km/hで測定したamax 90及び50 km/hで測定したawotを用いて,式(A.4)と
なる。
ref
wot
90
max
P
1
a
a
k=
−
········································································ (A.4)
無次元のエンジン回転速度は,累積頻度90 %の発生騒音に相当する。
この定義で,(1−kP)は,市街地走行で使用される最大加速度以上を運転者がもつ加速余裕として解釈す
ることができる。
車両クラスM1,N1,N2及びN3:騒音試験路データ(手動変速機)を使用して算出した
全開加速度AWOTVPP = 50 km/h
AWOTVPP50 2003/09/15(127台の車両についてN/SL90で算出)
対数回帰曲線[AWOTVPP50 2003/09/15(127台の車両についてN/SL90で算出)]
45
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.18−係数kP
A.2.10 累積頻度90 %の音圧レベルを測定するための新しい方法
車両の実際の運転挙動及び車両の騒音発生挙動の分析は,最も騒音が高い現実の市街地走行条件を代表
する次の計測手法を導く。
車両の実際の運転挙動及び車両の騒音発生挙動の分析は,最も騒音が高い,次の要素での現実の市街地
走行条件を代表する次の計測手法を導く。
− 50 km/hの車両速度。
− 車両加速度awot ref。
− 部分加速(部分加速係数)。
測定は,次のとおり実施する。
− JIS D 8301に適合する試験路にて測定を実施する。
− 全ての測定について,車両速度はPP'上のマイクロホンの正面で測定する。
− 車両の加速度は,AA'及びBB'の間の平均加速度であり,式(A.5)による。
(
)
ref
20
2
AA'
2
BB'
test,
wot
2
6.3
6.3
l
l
v
v
a
j
+
×
−
=
····················································· (A.5)
ここに,
awot test, j: 加速度の数値(m/s2)
vBB',vAA': 車速の数値(km/h)
車両クラスM1,N1,N2及びN3:aurban及びawotで算出したkPトルク係数
(手動変速機)
全開加速度awot
市街地走行条件の最大加速度aurban
負荷係数kP = 1−(aurban / awot) (全開加速の場合kP = 0)
46
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
l20,lref: 長さの数値(m)
A.2.11 部分加速に対する車両発生騒音
部分加速に対する車両発生騒音Lurbanは,ある車両速度及びエンジン回転速度に対して車両の音圧レベル
がエンジントルクに比例するという前提を利用して,次の二つの試験結果の組合せによって計算する。
− 車両の加速度がawot refに達し,Lwot repの音圧レベルを発生する全開加速試験。
− Lcrs repの音圧レベルを発生する定常走行試験(50 km/h)。
最終結果は,これら二つの結果の加重平均を式(A.6)によって求める。
)
(
rep
crs
rep
wot
P
rep
wot
urban
L
L
k
L
L
−
×
−
=
············································· (A.6)
A.2.12 変速段i及び(i+1)の選択
全開加速度awot refは,二つの変速段i,及び変速段(i+1)に対応するawot i,及びawot (i+1)の加速度の組合せ
によって,式(A.7)及び式(A.8)で計算する。
i
i
a
a
a
wot
ref
wot
)1
(
wot
<
<
+
······························································· (A.7)
(
)
1
wot
wot
)1
(
wot
ref
wot
+
+
−
−
=
i
i
i
a
a
a
a
k
·································································· (A.8)
ここで,kを変速段iと変速段(i+1)の間の補間係数として定義する。
A.2.13 全開加速騒音及び定常走行騒音
車両速度及びエンジン負荷が一定である場合,騒音は,エンジン回転速度に比例するという前提を利用
して,全開加速音圧レベルLwot rep又は定常走行音圧レベルLcrs repは,全開加速,及び定常走行での変速段i,
及び変速段(i+1)の音圧レベルの組合せによって,式(A.9)及び式(A.10)で計算できる。
)
(
)1
(
wot
wot
)1
(
wot
rep
wot
+
+
−
×
+
=
i
i
i
L
L
k
L
L
············································ (A.9)
)
(
)1
(
crs
crs
)1
(
crs
rep
crs
+
+
−
+
=
i
i
i
L
L
k
L
L
················································(A.10)
音圧レベルLurban(二つの異なる変速段での全開加速及び定常走行音圧レベルの組合せとして得られる)
は,50 km/hにおける加速度の累積頻度90 %で加速中の車両の市街地走行での音圧レベルである。したが
って,Lurbanは,典型的な市街地条件における発生騒音の累積頻度90 %を表す。図A.19に,乗用車及び小
型貨物車の手順を要約する。
47
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
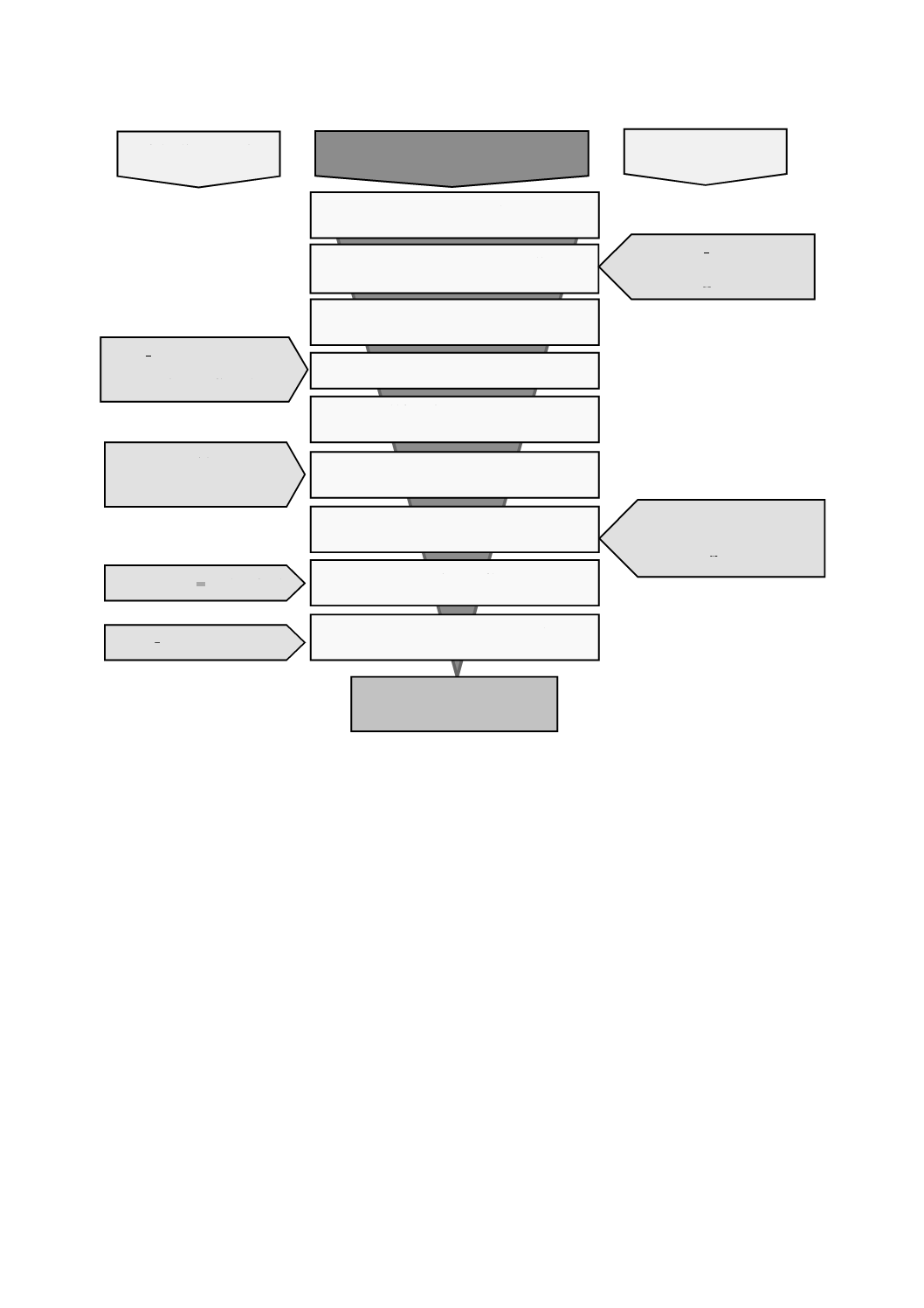
図A.19−通過騒音の測定方法
注記 これは,基本的な測定手順を示している。個別の要件については,実際の測定方法を参照する。
A.2.14 騒音の測定レベルを超過する期間
市街地走行の間,車両の音圧レベルが,提案された方法に従い測定された音圧レベルを超えている時間
比率の程度を次に示す。図A.20は,全てのスロットル条件,全ての変速段,及び全ての車両速度を測定し
た車両の騒音マップを表す。
試験で使用される式
統計的検討による基準値
型式認証試験中に行う手順
車両の出力質量比の算出
全開加速試験の参照加速度Awotの算出
二つの異なるギヤi及びi+1に対する全開加速条
件下での音圧レベル及び加速度の測定
参照加速度による結果の加重合成
二つの異なるギヤi及びi+1に対する
定常走行音圧レベルの測定
全開加速試験の重み付け係数による
結果の加重合成
目標加速度aurbanの算出
部分加速係数の算出
型式認証試験時の
公式結果
市街地走行を代表する音圧レベルの算出
Awot = 1.59×
Log(MP)+1.41
aurban = 0.63×
Log(MP)+0.09
Lwot = Lwot(i+1)+k(Lwot(1)・Lwot(i+1)
K = (Awot・ai+1/(ai・ai+1)
Lcst = Lcst(i+1)+k(Lcst(1)・Lcst(i+1)
K=(Awot・ai+1)/(ai・ai+1)
Kp = 1・ (aurban/Awot)
L = Lwot・Kp (Lwot・Lcst)
48
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
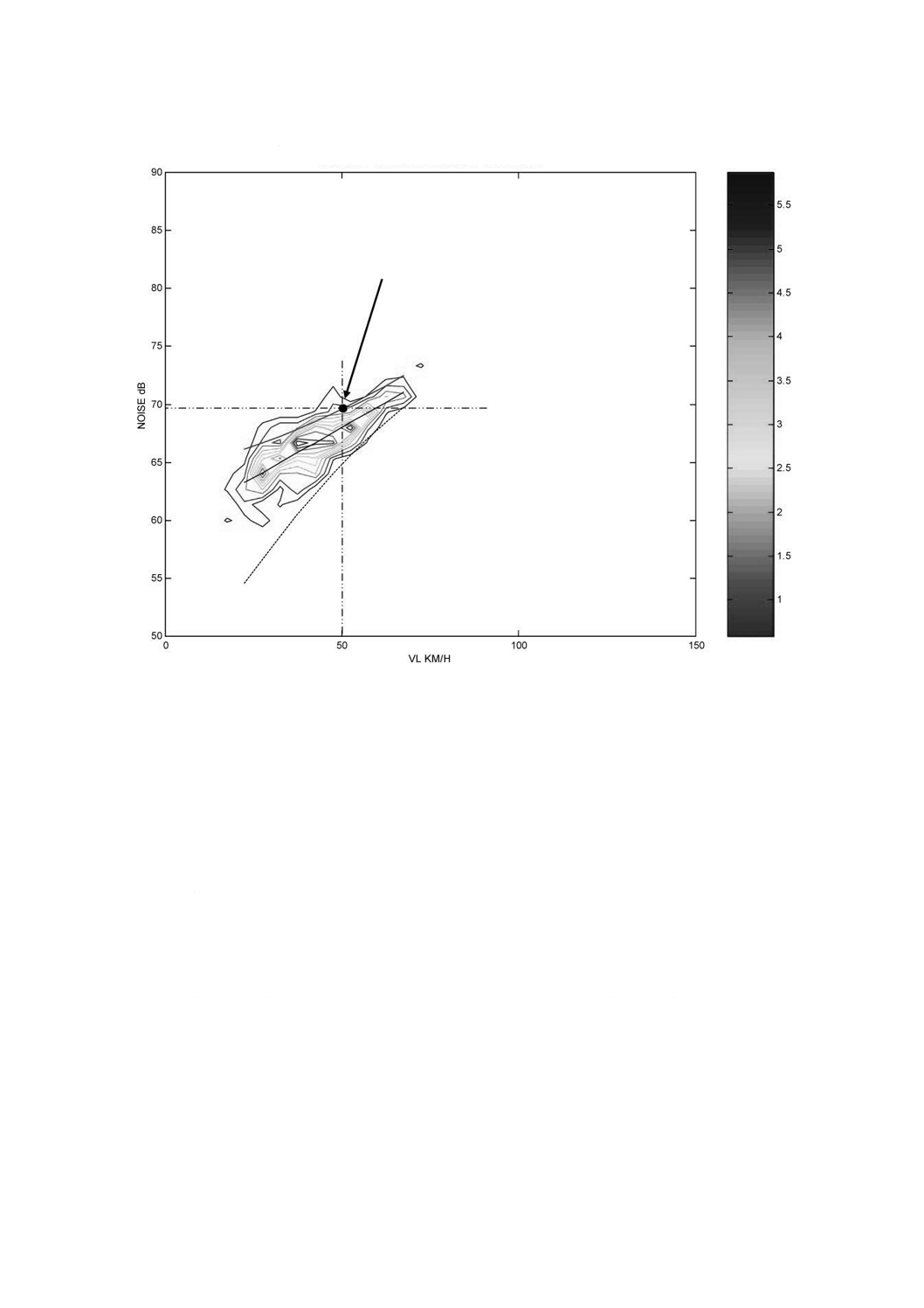
図A.20−最大加速度における,市街地走行条件下の車両から発生する騒音の最大レベル
(走行中の確率密度)
発生騒音が部分加速係数,変速比及び車両速度の関数であることから,車両の瞬間的な市街地走行での
発生騒音を算出することが可能である。必要な情報は,走行中の車両速度,変速比及び車両の加速度であ
る。これは,時間に応じた発生騒音となる。
加速中の最大音圧レベルを,統計的に分析する。図A.20は,最大騒音が発生する車速での車両の最大音
圧レベルの二次元での確率密度図である。例として,この車両の測定された音圧レベルは,この方法によ
れば70 dBである。
市街地走行において,加速中の最大発生騒音は,50 km/hでの加速中の数パーセント(例では2 %),及
び50 km/hより高い車両速度は除いて,この規格に定義される方法に従い,試験路で測定された音圧レベ
ルを超えないことが分かる。
A.2.15 カテゴリM1及び最大車両総質量が3 500 kgを超えないM2,並びにカテゴリN1用の方法の概要
図A.19にまとめられた,この規格に定義された方法は,大部分の騒音を引き起こす走行(すなわち,50
km/hでの加速中)における,車両の市街地走行の音圧レベル測定を可能とする。
測定した音圧レベルは,市街地走行における加速中に発生された最大騒音の累積頻度90 %に相当する。
この方法は,全ての影響のある車両騒音源を発生させ,市街地環境における車両の発生騒音の累積頻度
90 %の推定値を提供する。路面が良い条件であり,JIS D 8301で規定された騒音特性に近似している場合,
この騒音推定値は,環境における実際の車両騒音に対して良い相関関係となる。
2000年6月23日 車両速度及び車両騒音の二次元の確率密度
車両23 全道路及び全変速段の値 294
騒音試験路で測定した騒音
49
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
“低騒音”であるように特別に設計された路面は,典型的なM1,及びN1車両に対してJIS D 8301路
面よりも発生騒音レベルが低く,現在使用されている。
この方法は,車両の加速能力及び出力質量比によって決まる実際の運転挙動を考慮している。
この方法は,加速度の性能基準に基づいており,車両技術,変速機種類,変速段数及びエンジンの種類
に影響を受けない。これらの性能基準によって,この方法を,適応型自動変速機,ハイブリッド車両,電
気自動車及び燃料電池自動車を含む,現在及び将来の車両に適用することができる。
50
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
測定の不確かさ
ISO/IEC Guide 98-3(GUM)による解析の枠組み
B.1
一般
測定手順は,同一対象について観測された結果のばらつきにつながる複数の変動要因の影響を受ける。
このばらつきの原因及び特性は,完全には分かっておらず,予測できない形で最終結果に影響を及ぼす
ことがある。一般的に測定方法に関する不確かさの表現として承認された形式は,ISO/IEC Guide 98-3に
記載されている。この形式は不確かさ集を構成し,その中で全ての多様な不確かさの原因が識別され,定
量化されている。そして,そこから合成標準不確かさを得ることができる。不確かさは,次の要因に起因
する。
− サウンドレベルメータ,音響校正器,速度測定装置などの測定機器のばらつき
− Lurban測定時に音の伝ぱに影響を及ぼす局所的環境条件のばらつき
− 通過走行中の車速及び車両位置のばらつき
− 音源の特性に影響を及ぼす局所的環境条件のばらつき
− 主にエンジン性能など,出力特性に影響を及ぼす環境条件(大気圧,大気密度,湿度及び気温)の影
響
− 推進システムからの音に影響する環境条件(大気圧,大気密度,湿度及び気温)の影響,及びタイヤ
騒音(タイヤ及び路面の温度,湿った路面)の影響
− 試験場の特性(路面のきめ,吸音及び勾配)
8.5によって決定された不確かさは,この規格に関連した不確かさを表している。ここには,製造工程に
おけるばらつきに関連した不確かさは含まれていない。同一工程で製造された車両の市街地での音圧レベ
ルのばらつきは,この規格の適用範囲外である。
不確かさの影響は,次の原因から三つに分類してもよい(8.5参照)。
a) 走行ごとのばらつきによる不確かさは,連続走行での車両の動作状況の変化,気象条件の僅かな変化,
暗騒音レベルの僅かな変化及び計測システムの不確かさによる。
b) 日ごとのばらつきによる不確かさは,年間を通しての気象条件の変化,試験路面の経時変化,長期に
わたる計測システム性能の変化及び車両の動作状況の変化による。
c) 試験場ごとのばらつきによる不確かさは,異なる試験場,計測システム,試験路面特性及び車両の動
作状況による。
試験場ごとのばらつきは,a),b)及びc)に含まれる不確かさの原因からなる。日ごとのばらつきは,a)
及びb)に含まれる不確かさの原因からなる。
B.2
市街地走行時の車両の音圧レベルの計算式
市街地走行時の音圧レベルLurbanの一般的な計算式は,式(B.1)で与えられる。
(
)
7
6
5
4
3
2
1
rep
crs
rep
wot
P
rep
wot
urban
δ
δ
δ
δ
δ
δ
δ
+
+
+
+
+
+
+
−
−
=
L
L
k
L
L
·········· (B.1)
51
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに, Lwot rep: 全開試験によるA特性時間重み付きサウンドレベル
Lcrs rep: 定常走行試験によるA特性時間重み付きサウンドレベル
kP: 部分加速係数(該当する場合)
δ1: 計測システムの不確かさを考慮した入力量
δ2: 測定時に音源からの音の伝ぱに影響を及ぼす環境条件の不
確かさを考慮した入力量
δ3: 車速及び車両位置の不確かさを考慮した入力量
δ4: 音源の特性に影響を及ぼす局所的環境条件の不確かさを考
慮した入力量
δ5: 動力装置の機械的特性に対する環境条件の影響の不確かさ
を考慮した入力量
δ6: 推進システムからの音及びタイヤ・路面騒音に対する環境
条件の影響の不確かさを考慮した入力量
δ7: 主に路面特性に関係する試験場の特性の影響の不確かさを
考慮した入力量
注記1 不確かさを考慮するための式(B.1)に含まれる入力は,この規格の制定時点での情報から該当
すると考えられるものであり,今後の研究によってこれ以外のものが明らかになる可能性が
ある。
注記2 カテゴリN2,N3及び最大車両総質量が3 500 kg を超えるカテゴリM2,並びにカテゴリM3
について,kPは常にゼロである。
注記3 δ関数の推定値は,ある測定ではゼロになることも考えられるが,通常はプラス又はマイナ
スとなる(表B.1参照)。それらの不確かさは,測定結果を決定する目的のために加算するも
のではない。
B.3
不確かさの一覧
表B.1−市街地音圧レベルを決定するための不確かさの一覧
量
推定値
dB
標準不確かさ,ui
dB
確率分布
感度係数,ci
不確かさの寄与,uici
dB
Lwot rep
Lwot rep
1
kP
kP
Lwot rep−Lcrs rep
Lwot rep−Lcrs rep
Lwot rep−Lcrs rep
kP
δ1
0
1
δ2
0
1
δ3
0
1
δ4
0
1
δ5
0
1
δ6
0
1
δ7
0
1
様々な入力量に相関関係がある可能性を考慮し,各不確かさの寄与uiciから,ISO/IEC Guide 98-3の規
則に従い合成標準不確かさuを算出できる。
注記 記載されている不確かさの評価は,この規格の利用者に有益な情報を提供する枠組みを示す。
この情報は,現時点の最新技術情報を示している。
52
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式(B.1)の全項及び項と項との間の全相互作用に関する不確かさの情報を提供するためには,
更に作業が必要である。
B.4
測定の拡張不確かさ
拡張不確かさ“U”は,ISO/IEC Guide 98-3に記載されているとおり,合成標準不確かさ“u”に,選択
した包含確率に対応する適切な包含係数を乗じて算出される。
53
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
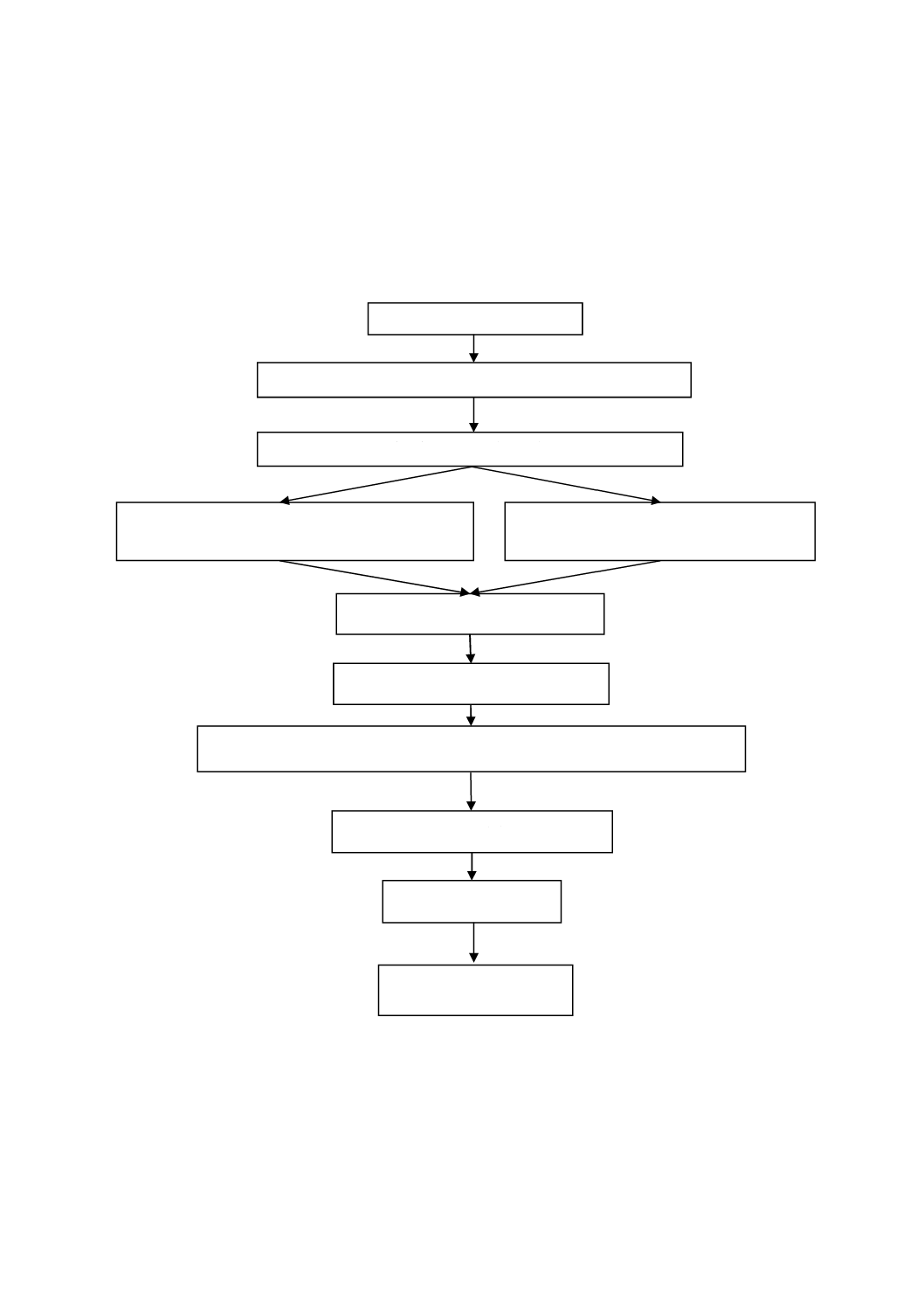
附属書C
(参考)
カテゴリM1及び最大車両総質量が3 500 kgを超えないカテゴリM2,
並びにカテゴリN1の手順のフローチャート
図C.1−Lurbanの計算のフローチャート
試験車両のPMR(3.2)の決定
目標加速度aurban(5.3)及び参照加速度 awot ref(5.4)の決定
試験方法の選択(8.3.1.3)
変速比を固定する場合(8.3.1.3.2),図C.2,図C.3及
び図C.4を参照
変速比を固定しない場合(8.3.1.3.3),図C.5
を参照
加速走行試験(8.3.1.4)の実施
定常走行試験(8.3.1.5)の実施
二つの変速比で試験を実施した場合,変速比重み付け係数kの計算(8.3.1.3.2)
Lwot rep 及び Lcrs rep の計算 (8.4.3.2)
kPの計算 (8.4.3.2)
Lurbanの計算 (8.4.3.2)
54
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
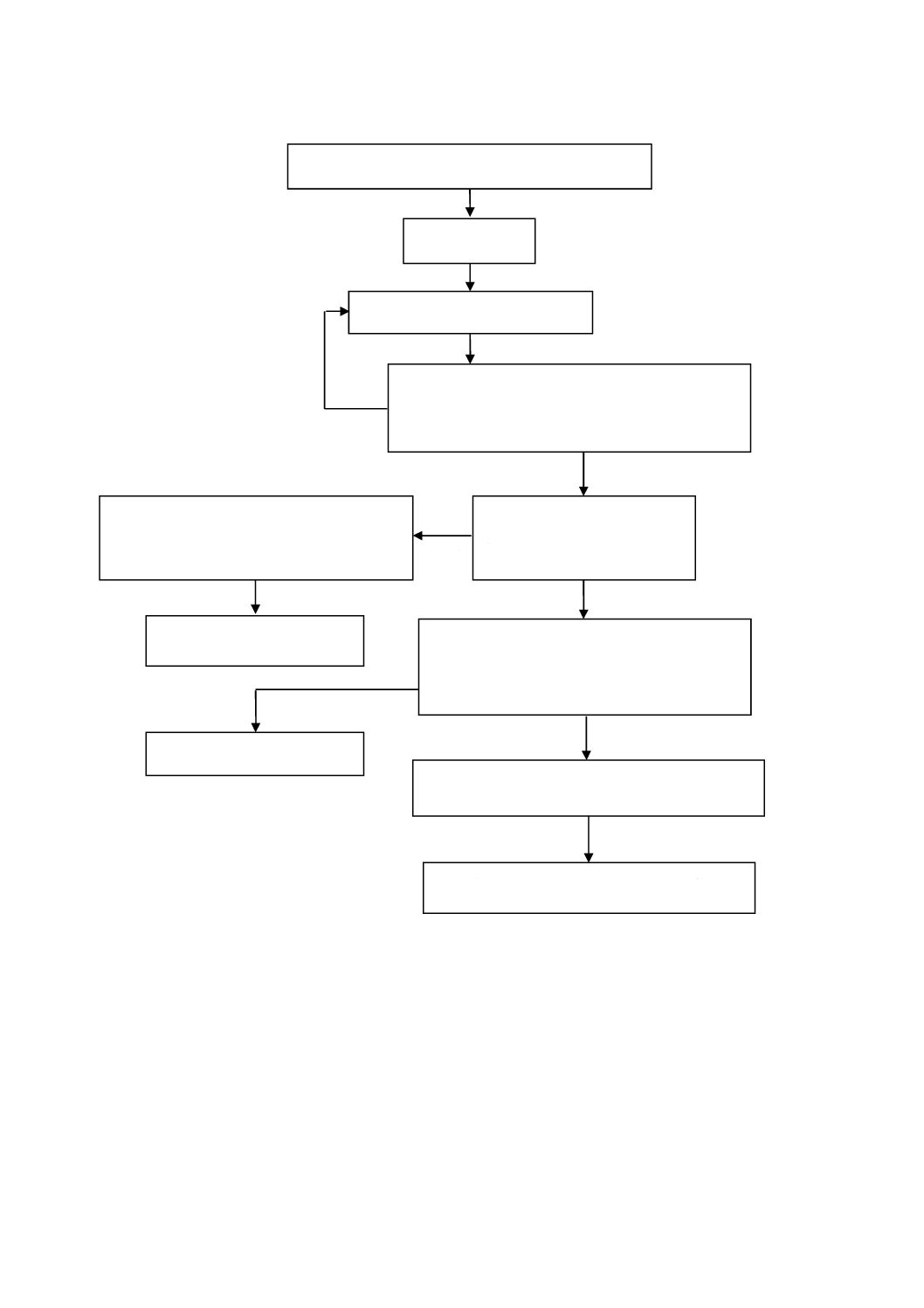
図C.2−変速比を固定する場合の変速段選択のフローチャート
変速段iの安定した加速度がawot refより大きく,
変速段i+1 の安定した加速度が
awot ref未満となるような変速段の選択
変速段の選択
加速度は安定しているか。すなわち,遅れがない。
式(1)による試験時の加速度の計算
予備加速及び進入速度の選択
はい
いいえ
加速度はawot refの許容範囲内に
あるか。
はい
いいえ
加速度は2.0 m/s2以下か。そして,BB'でのエンジ
ン回転速度がSより低いか。
その変速段を使用して,式(28)によるkPの計算
有効な走行の結果によるLwot repの計算
いいえ
図C.3のケース2で確認
図C.3のケース1で確認
はい
8.3.1.3.2 に従った変速比を固定した試験の実施
55
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図C.3−変速比を固定する場合の変速段選択のフローチャート
はい
いいえ
変速段iでの加速度は
2.0 m/sec2以下か。
変速段iと変速段i+1の両方を使用して,式(27)によって
kPを,及び式(23)によってkを計算
有効な走行の結果を使用してLwot repを計算
ケース1:
安定した加速度がawot refより大きくなる変速段i,及び安
定した加速度がawot ref未満となる変速段i+1の二つの変
速段
ケース2:
安定した加速度が2.0 m/sec2を超える,又は,BB'での
エンジン回転速度がSより高くなる一つの変速段
安定した加速度が2.0 m/sec2以下,及びBB'でのエンジン回転速
度がS未満の最初の変速段i + n (n=1,2,…) の決定
変速段i + n での加速度はaurbanより高いか。
はい
式(28)によってkPを計算
いいえ
変速段iのエンジン回転速度は,BB'
の前でSより高いか。
図C.4のケース3で確認
加速度が2.0 m/sec2を超える変速段i,及び加速度がaurban
より低くなる変速段i+1の両方を使用
はい
いいえ
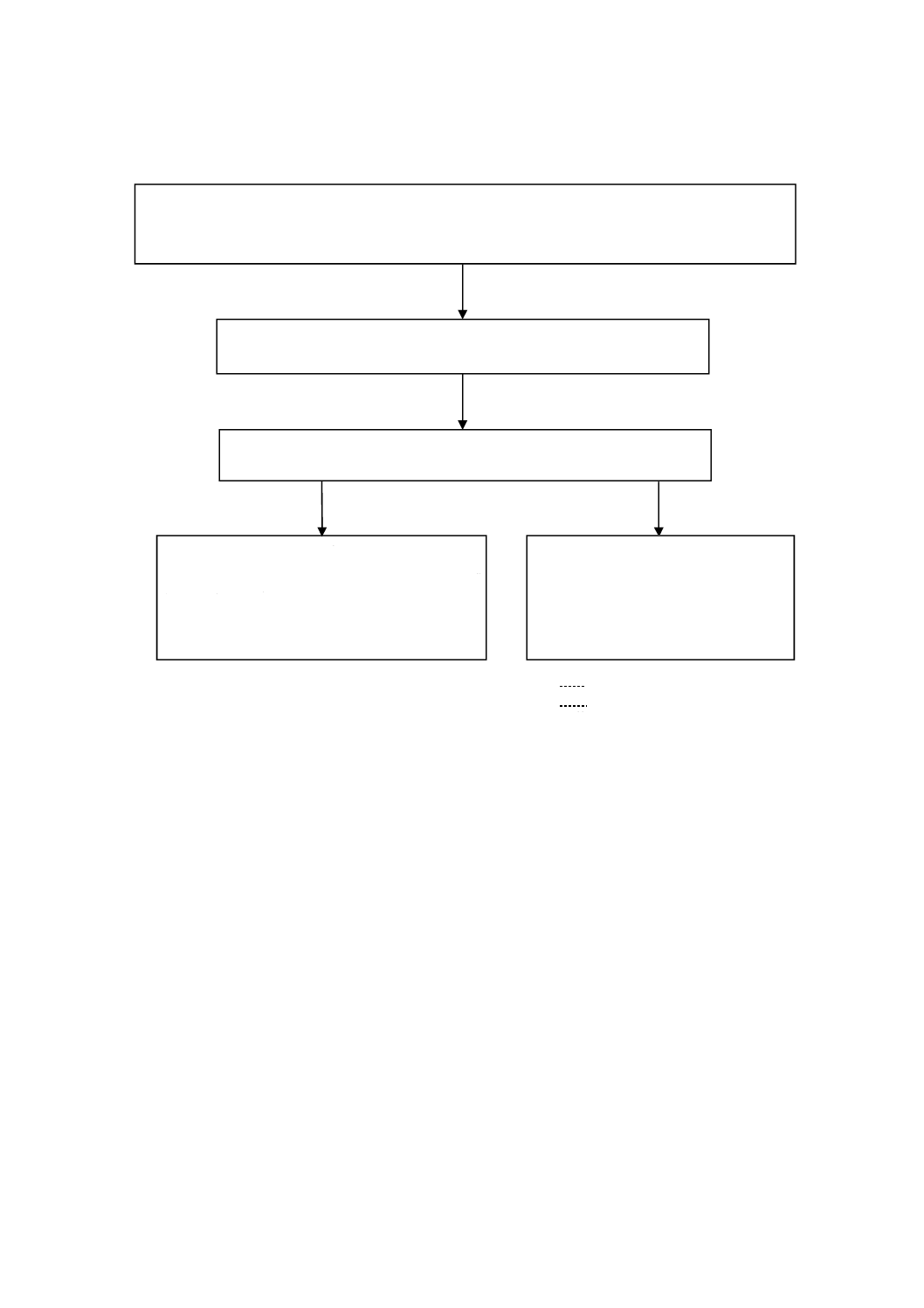
56
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図C.4−変速比を固定する場合の変速段選択のフローチャート
ケース3:
加速度がaurbanを超え,更にBB'でのエンジン回転速度がSより低くなる変速段がない場合
試験車速を2.5 km/hずつ下げる。
新たな試験車速で,変速比を固定して
8.3.1.3.21)に従って試験を実施。
試験車速が40 km/h以上か。
いいえ
はい
安定した加速度が2.0 m/sec2以下で,かつ,BB'での
エンジン回転速度がS未満となる最初の変速段i + n
(n=1,2,…) を決定。
その変速段で,試験車速,v test, 50 km/hの試験を実
施。
注1)
ISO 362-1の誤記を正しく
記載。
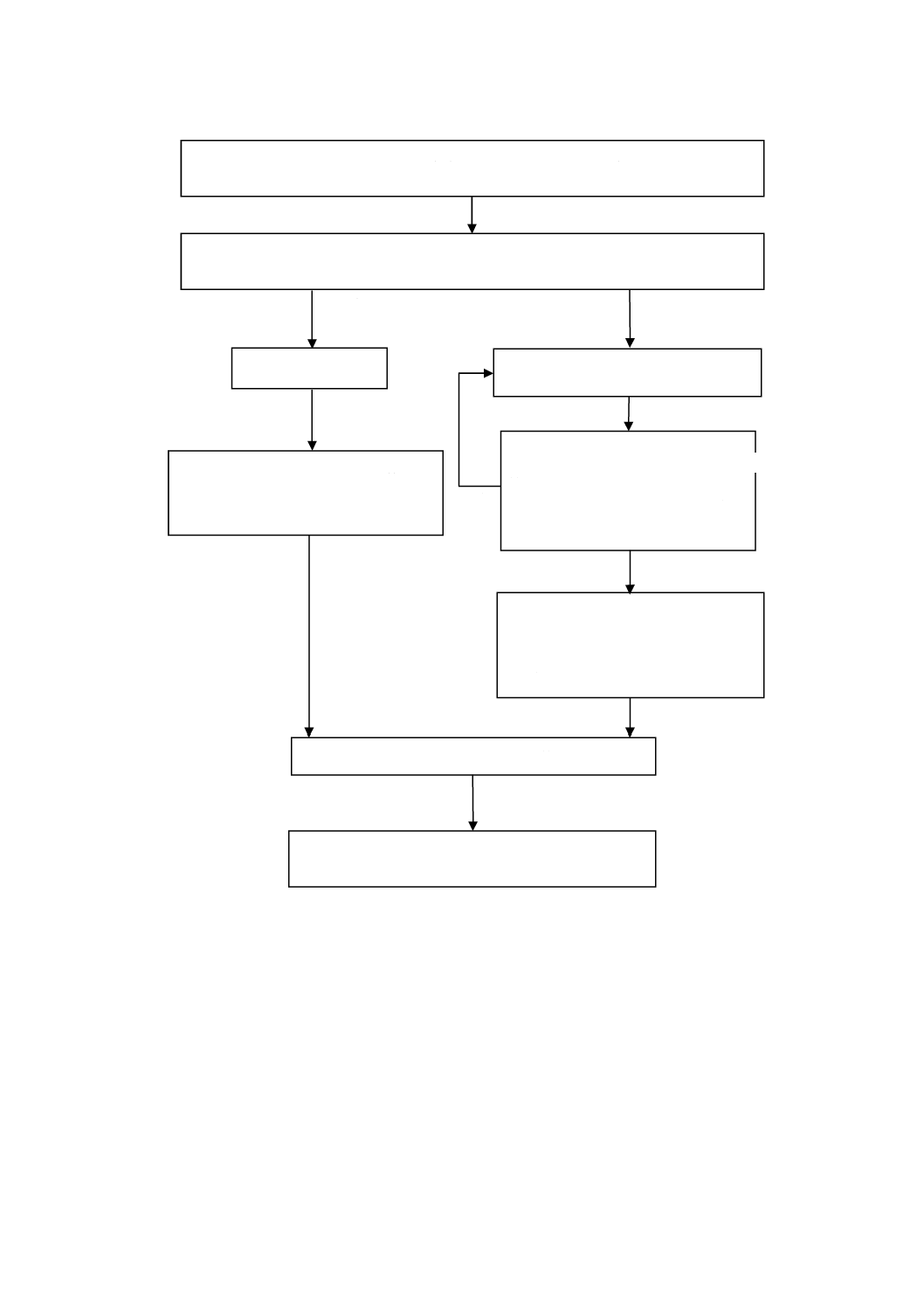
57
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図C.5−変速比を固定しない場合の適切な加速度及びLwot rep決定のフローチャート
はい
いいえ
有効な走行の結果を使用してLwot repを計算
式(2)によって,試験時加速度を計算。
予備加速は,不可。
式(28)によって,kPを計算
ダウンシフトを制御して計測可能か。
加速度は,安定しているか。すなわち,
遅れがない。
式(1)によって,試験時加速度を計算。
予備加速及び進入速度の選択
いいえ
はい
可能なら,2.0 m/sec2以下の加速度を得る
ためのダウンシフトに制御する。不可能
な場合は,2.0 m/sec2より高い加速度の走
行が有効となる。
8.3.1.3.3に従った変速比を固定しない試験の実施
進入速度の選択
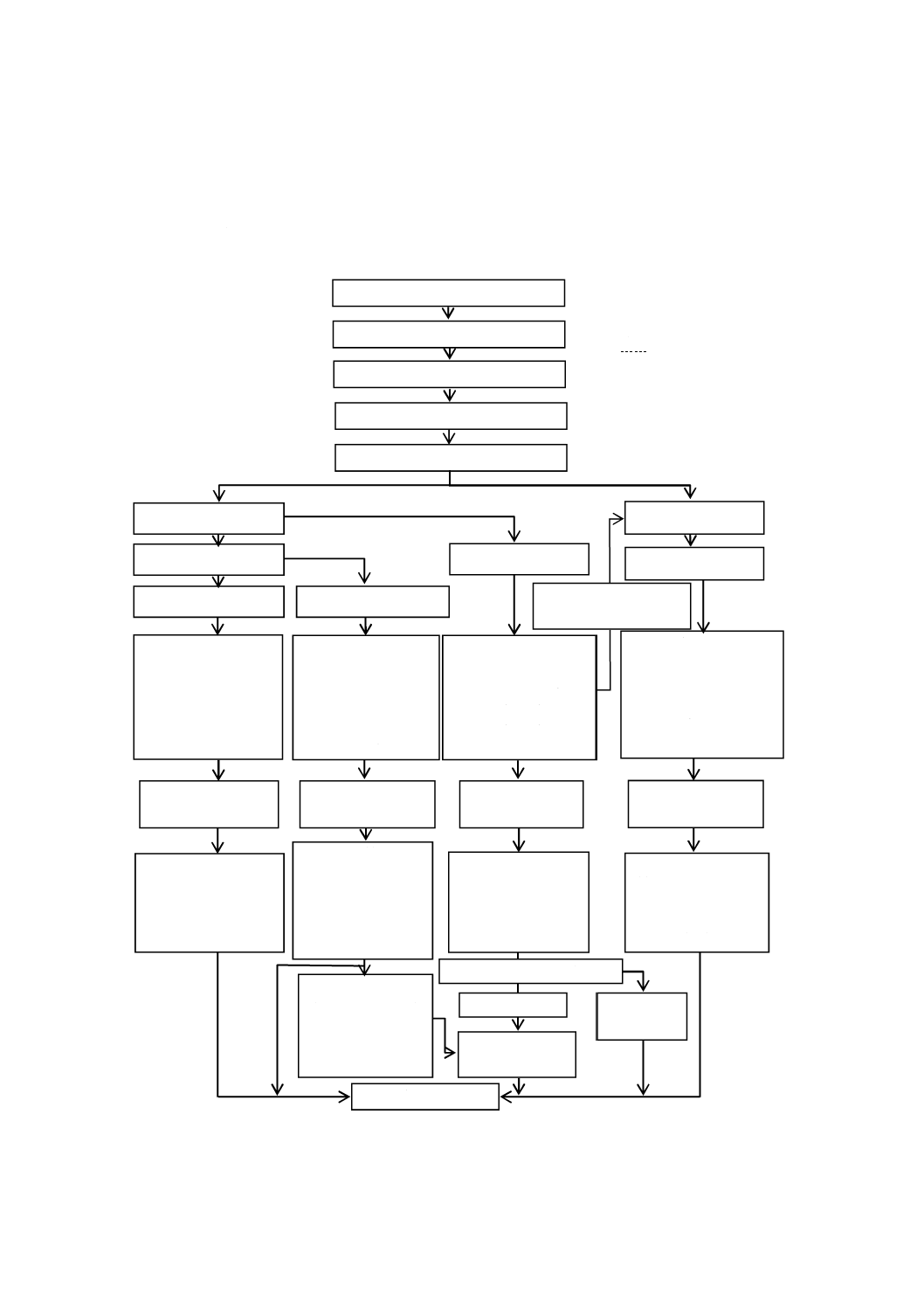
58
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,
N2及びN3の変速比を固定して試験する車両のフローチャート
図D.1−固定された変速比を使用する大型商用車のフローチャート
一つのギヤで満足
複数のギヤで満足
試験基準
[8.3.2.3.2d)]
nBB'=ntarget BB'
25 km/h≦vBB'x≦30 km/h
40 km/h≦vBB'y≦45 km/h
試験基準
[8.3.2.3.2a)]
nBB'=ntarget BB'
vBB'=vtarget BB'
試験基準
[8.3.2.3.2b)]
nBB'=ntarget BB'
ギヤiによるvBB'gear i
は,vtarget BB'に最も近
いこと
試験基準
[8.3.2.3.2f)]
vBB'gear i=vtarget BB'
nBB'gear i≦ntarget BB'
できるだけntarget BB'に
近いギヤを選択
一つの試験条件
少なくとも二つの
試験条件
少なくとも二つの
試験条件
二つの試験条件
Lurban
(8.4)
vBB'xによるLurban x
vBB'yによるLurban y
(8.4)
ntarget BB'を超えない
最も近いnBB' gear iに
よるLurban
(8.4)
最終結果(8.4.4)
[8.3.2.3.2c)]
(vtarget BB'−vBB'gear i)
が (vBB'gear i+1
−vtarget BB') に等し
い場合
積載荷重の決定(8.2.2)
目標条件の設定(8.3.2.2)
試験方法の選定(8.3.2.3)
変速比の固定(8.3.2.3.2)
目標条件(8.3.2.2)を満たすか。
ntarget BB'=No
ntarget BB'=Yes
vtarget BB'=No
vtarget BB'=Yes
vtarget BB'=Yes
nBB'=ntarget BB'かどうか
両ギヤとも
もし[8.3.2.3.2e)]1)
なら
注1)
[8.3.2.3.2e)]は,
[8.3.2.3.2d)]を満たさな
い場合について記載され
ている。
vtarget BB'に最も近い
vBB'gear iが得られる
ギヤiによるLurban
(8.4)
算術平均
(8.4.4)
一つのギヤ
だけ
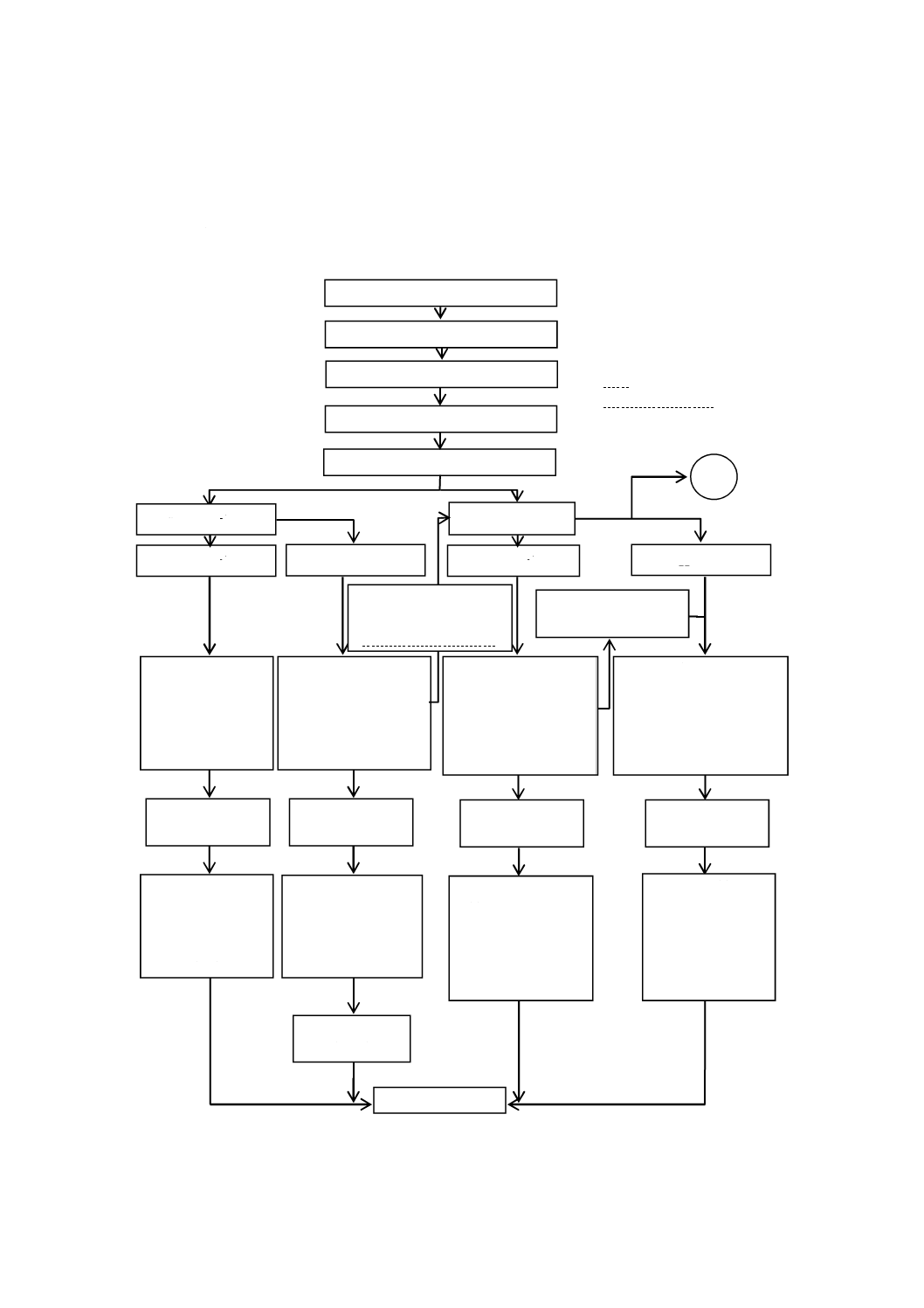
59
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,
N2及びN3の変速比を固定しないで試験する車両のフローチャート
図E.1−固定されない変速比を使用する大型商用車のフローチャート
最終結果(8.4.4)
試験基準
[8.3.2.3.3a)]
nBB'=ntarget BB'
vBB'=vtarget BB'
試験基準
[8.3.2.3.3b)]
nBB'=ntarget BB'
25 km/h≦vBB'1≦35 km/h
35 km/h≦vBB'2≦45 km/h
一つの試験条件
二つの試験条件
一つの試験条件
二つの試験条件
Lurban
(8.4)
vBB'1によるLurban 1
vBB'2によるLurban 2
(8.4)
f
変速比の非固定(8.3.2.3.3)
積載荷重の決定(8.2.2)
目標条件の設定(8.3.2.2)
試験方法の選定(8.3.2.3)
目標条件(8.3.2.2)を満たすか。
ntarget BB' = Yes
vtarget BB' = Yes
vtarget BB' = No
vtarget BB' = Yes
BB'=No
ntarget BB' = No
もし[8.3.2.3.3c)]なら
[8.3.2.3.3b)
を満たさない場合]1)
算術平均
(8.4.4)
ntarget BB'に最も近
いnBB'によるLurban
(8.4)
ntarget BB'を超えない
最も近いi=1,2の
nBB' iによるLurban
(8.4)
もしnBB'i>ntarget BB'
なら
試験基準
[8.3.2.3.3d)]
25 km/h≦vBB'1≦30 km/h
40 km/h≦vBB'2≦45 km/h
nBB'i≦ntarget BB'
試験基準
[8.3.2.3.3e)]
vBB'=vtarget BB'+5 km/h
nBB'はntarget BB'に最も
近いこと
注1)
補足説明を追加。
60
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図E.2−固定されない変速比を使用する大型商用車のフローチャート
ギヤ選択がDだけの車両は,
vtarget BB'で規制する
f
試験基準
[8.3.2.3.3f)]
vBB'=vtarget BB'
一つの試験条件
Lurban
(8.4)
最終結果(8.4.4)
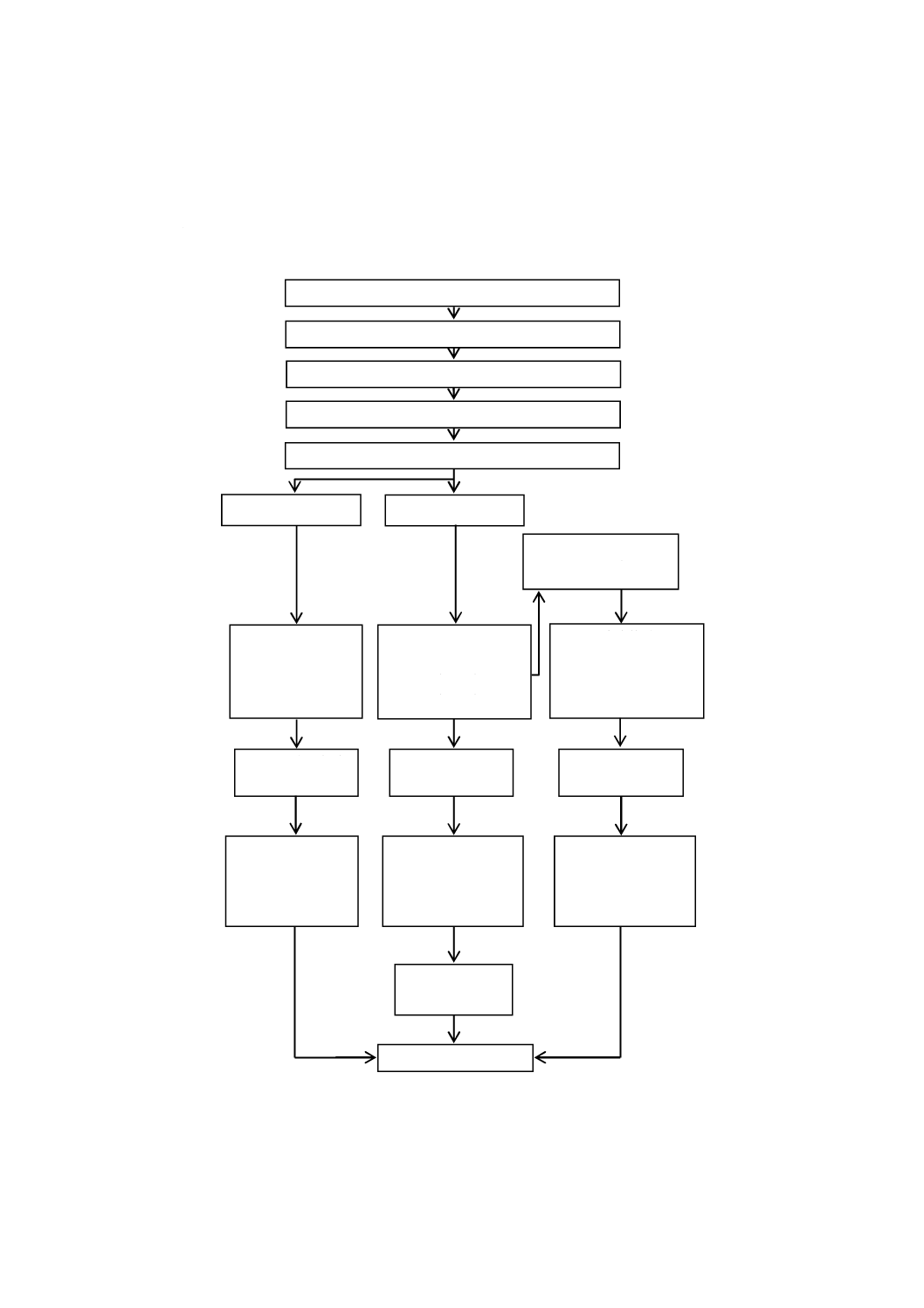
61
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(参考)
最大車両総質量が3 500 kgを超えるカテゴリM2,並びにカテゴリM3,
N2及びN3の利用可能なエンジン回転速度のない車両のフローチャート
図F.1−利用可能なエンジン回転速度のない大型商用車のフローチャート
利用可能なエンジン回転速度なし(8.3.2.3.4)
試験基準
[8.3.2.3.4a)]
vBB'=vtarget BB'
最終結果(8.4.4)
一つの試験条件
二つの試験条件
一つの試験条件
Lurban
(8.4)
vBB'1によるLurban 1
vBB'2によるLurban 2
(8.4)
vBB'2によるLurban 2
(8.4)
試験基準
[8.3.2.3.4b)]
25 km/h≦vBB'1≦35 km/h
35 km/h≦vBB'2≦45 km/h
試験基準
[8.3.2.3.4c)]
35 km/h≦vBB'2≦45 km/h
積載荷重の決定(8.2.2)
目標条件の設定(8.3.2.2)
試験方法の選定(8.3.2.3)
目標条件(8.3.2.2)を満たすか。
vtarget BB'=Yes
vtarget BB'=No
vBB'1が条件を満たせ
ない場合
算術平均
(8.4.4)
62
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(参考)
屋内試験手順
G.1
一般
室内音響学の技術の進歩によって,今日では,シャシダイナモメータでの車両走行シミュレーション及
びデジタル信号処理が可能となり,屋内での車外騒音の測定が高い精度で可能となっている。様々な屋内
設備で実施された試験が,従来の屋外の試験場で行われた試験と良い相関を示している。この規格で記載
している試験を,屋内環境で行うことは,気象,暗騒音などの環境条件による制約を除外する。加えて,
屋内試験は,多くの反復する試験が行われる車両開発工程で著しく時間を節約することができる。
この附属書の中に記載された情報は,屋内外の試験の相関を改善する情報のみならず,屋内試験設備の
ための基本的な要求事項を概説する。
注記 更なる情報は,今後ISO 362-3(屋内試験 M及びNカテゴリ)で提供される。
G.2
概念
この規格に記載されている車外騒音試験方法は,市街地走行中の車両から路上の人に放射する騒音を測
定するように考案されている。この規格の主要な基準の一つは,試験が音響的自由音場,より正確に言え
ば,半無響空間で行われることである。
この音響上の基準は,屋外空間と同等な伝ぱ特性をもった半無響空間が得られるように,十分に大きな
シャシダイナモメータ室に吸音くさびを装着することによって,実験室で達成できる。
シャシダイナモメータ試験機を,車両の道路走行を再現するために使用する。車両の放射騒音を,時間
軸の音響データを収集する移動式マイクロホン又はマイクロホンアレイを使用して測定する。デジタル信
号処理技術及び同期収集された時間軸の音響データを使用することで,屋外試験のような静止している測
定点を通過する車両の動きを再現する。
G.3
屋内空間の要求事項
屋内の広さを決める因子は,必要な半無響空間の低周波数カットオフ値で決まる。通常,マイクロホン
は,吸音壁から,必要としている最低周波数の4分の1波長の位置に置く。そして,吸音部材も通常4分
の1波長であることが望ましい。例えば,4気筒エンジンを1 000回転の低い回転速度で試験する場合,エ
ンジンの最低爆発周波数は,おおよそ34 Hzである。
低周波数カットオフ値が34 Hzの半無響室を設計するためには,くさび厚さは通常2.6 mになる。この
例の場合,試験室の外側の寸法は,片側試験用では,約18 m,両側試験用では,約27 mが望ましい。
試験室の長さは,試験する最も長い試験車全長に試験路長(20 m),吸音くさび及びマイクロホンを設
置する空間を加えた長さに依存する。代表的車両が5 mの長さの場合,試験室の長さは,36 mが望ましい。
試験室の高さは,同様の要求に従う。しかしながら,通常使われている値は,くさび表面まで7.5 mで
ある(外側寸法は10.1 mになる)。
試験室の全ての寸法は,試験する製品に対して適合できるように調整されることが望ましい。
63
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.4
シャシダイナモメータの要求事項
この試験に使用できる多くのシャシダイナモメータの駆動方式がある。
その設備は,車両の駆動輪に走行抵抗を与えられることが望ましい。多くの場合,四輪である。
また,その設備は,試験室で計測される最低レベルよりも,15 dB以上静かになるように設計されるこ
とが望ましい。
一般的に,シャシダイナモメータ稼働時にA特性時間重み付きサウンドレベルが約50 dBであれば,ほ
とんどの要求事項を満たす。
実際,多くの設備では,A特性時間重み付きサウンドレベルが34 dB程度の低い暗騒音となっている。
その設備の試験空間の音響特性を保証するために,十分な音響周波数分析が行われることが望ましい。
最後に,シャシダイナモメータ装置は,車両の加速走行試験の早い過渡現象に追従できることが望まし
い。
多くの場合,車両は,コンピュータ制御のスロットル装置で運転される。
もし,車両を人が運転する場合,空調設備の設計を追加考慮するのがよい(G.5を参照)。
しかしながら,人のばらつきによる全体の測定装置ばらつきの増加に注意する。
G.5
空調設備の要求事項
この規格に述べられている屋外での車両騒音試験を完全に模擬するために,車両の排気装置を,音響空
間に完全に露出した状態で試験するのがよい。この種の試験では,一酸化炭素及び他の有害ガスが危険な
高いレベルで発生することがある。この理由から,試験場の試験室は,有害ガスの周囲への漏出を防ぐた
め,十分に密閉されることが望ましい。さらに,試験室には,車両の排気ガスを除去し,試験空間へ十分
にきれいな空気を送ることができる排気装置を備えるのがよい。そのような装置が自動運転される場合に
は,静かに運転されるように,設計されることが望ましい。試験室は,また,一酸化炭素濃度の監視装置
を備えるのがよい。
車両の冷却は,長時間の試験において考慮されるのがよい。通常,車両の周囲に十分な冷却風を提供す
るために,車両の前に大形ファンを設置することができる。しかしながら,そのようなファンは,高騒音
であるため試験走行以外のときに作動させることが望ましい。試験室内の雰囲気温度の制御もまた考慮対
象である。一般的に,雰囲気温度(20±3)℃が,ほとんどの設備に適している。
G.6
マイクロホン配置
現在使用中の代表的な設備では,車両の片側,又は両側に1列に配置された15〜20本のマイクロホンを
使用している。マイクロホンアレイを,車両の縦の中心線から7.5 m離れた位置に配置している。ほとん
どの場合,マイクロホンアレイの位置は,車両先端の10 m前側から,車両後端の10 m後側までのライン
に沿って均等な間隔で置かれる。
G.7
データ分析
測定するマイクロホンの各々からの音響データが,時間履歴としてコンピュータメモリに収集され,保
存される。同時に,試験中の車速及びエンジン回転速度のデータが収集される。加速開始時を試験路のラ
インAA'に関連させたトリガ信号として,これらの様々な情報が合成される。各々のマイクロホンの時系
列データは,車速及び試験路に沿って関連付けられた位置に合わせて,順番に並べられる。
これらの信号を組み合わせることによって,単一のマイクロホン前を通過する車両の移動を表す仮想曲
64
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
線が,マイクロホンアレイのデータから作られる。デジタル信号処理システムは,試験路に沿った位置の
関数として,車両の音圧レベルの曲線を提供する。加えて,代表的な市販のシステムは,個々のマイクロ
ホンについて,時間に基づいた付加的な分析をする能力をもっている。これによって,例えば,排気出口
に直接沿った位置,又は車両のフロントアクスルの中心線位置におけるマイクロホンでの測定値のように,
特定の騒音源を特徴付けることが可能である。ほとんどのデータ処理システムは,車両騒音情報の詳細な
分布を作成する多くの解析ツールを提供する。
G.8
測定能力
今日使われている代表的な設備は,車両騒音全体に対するパワートレーンの部分について,屋外の路上
試験と屋内シャシダイナモメータ試験間に,良い相関を示している。これらの設備は,多くの車両製造業
者にとって,有効な手段となっている。
しかしながら,車両全体の相関については,課題が残されている。屋内と屋外との試験設備の相関性に
残る主な課題は,車両全体音に対するタイヤ・路面騒音の部分の適切な測定である。ほとんどの設備で,
生産タイヤが平均的な直径のシャシダイナモローラに置かれる場合,その接地面が変化するため,平たん
な試験路面より著しく騒音レベルが増加する。
この状況は,タイヤサイズ及び構造に大きく依存し,全ての車両に同じように影響するとは限らない。
試験の相関性を改善するために,溝のないタイヤを使用することができ,それによって良い結果が示さ
れている。タイヤと路面との接地によって発生する騒音は,他の方法によって評価される。
車両のタイヤ・路面騒音を別に測定して,車両全体騒音レベルを決めるために,二つの結果を合成する
研究が幾つかの機関によって行われている。
現時点は,車両全体騒音の相関に限度があるが,屋内環境で車外騒音試験を行えることが有益であると
示されている。特に雨,雪及び風の影響が深刻な時間損失となっている地域で,屋内試験方法は,環境条
件による制限を排除する。反復する試験が必要な車両の部品及びサブシステムの開発においても,貴重な
時間が節約される。さらに,屋内試験は,タイヤ以外の部品変更によって車両型式認証時の音圧レベルが
変わらないことを確認する検証データの提供に使うことができる。
65
D 1024-1:2016 (ISO 362-1:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(参考)
参考文献
[1] JIS D 1001 自動車用エンジン出力試験方法
[2] JIS Z 8000-3:2014 量及び単位−第3部:空間及び時間
[3] Enz W., & Steven H. Round Robin Test on test tracks as proposed in ISO/TC 43/SC 1/WG 27. Report No.
10505993/01, FIGE GmbH, Herzogenrath, Germany, 1992
[4] Schumacher R.F., Phanuef K.G., Haley W.J. SAE Noise 8 Vibration Conference Report, Paper 951361−SAE
and ISO Site Variability
[5] ACEA. submitted to. OICA, Technical Background Paper. GEB, 2000
[6] Steven H. WMTC Technical Report TRANS/WP.29/2005/55,7 April 2005 http://www.unece.
org/trans/main/welcwp29.htm
[7] Moore D.B. Evaluation of the Revised ISO 362 Standard for Vehicle Exterior Noise Measurement. Paper No.
2005-01-2417. Society of Automotive Engineers, 2005
[8] Donavan P.R. The Effect of Pavement Type on Low Speed Light Vehicle Noise Emission. Paper No.
2005-01-2416. Society of Automotive Engineers, 2005
[9] European Union Green Paper, COM/96/540, 1996
[10] International Institute of Noise Control Engineering, Draft Report from I-INCE Technical Study Group 5.
Global Noise Control Policy. Noise Control Eng. J. 2004 November−December, 52 (6)
[11] Steven H. Investigations on Improving the Method of Noise Measurement for Powered Vehicles, Report
Number 10506067 by order of the Germany Federal Environmental Agency, August 1999
[12] Steven H. Further Noise Reductions for Motorized Road Vehicles. Presentation within the Workshop of the
German Federal Environmental Agency, September 2001
[13] ISO 362-2,Measurement of noise emitted by accelerating road vehicles−Engineering method−Part 2: L
category
[14] ISO 1585:1992,Road vehicles−Engine test code−Net power
[15] JIS D 1024-2:2016 自動車の加速時車外騒音試験方法−第2部:Lカテゴリ
[16] ISO 80000-3:2006,Quantities and units−Part 3: Space and time
[17] Directive 2007/46/EC of the European Parliament and of the Council