D 0805:2010 (ISO 17387:2008)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 2
2 用語及び定義 ··················································································································· 2
3 分類······························································································································· 6
3.1 監視領域によるシステムの分類 ························································································ 6
3.2 目標車両の接近速度による分類 ························································································ 7
4 機能要件························································································································· 9
4.1 LCDAS機能状態図········································································································· 9
4.2 警報要件 ····················································································································· 12
4.3 ユーザインタフェース ··································································································· 16
4.4 トレーラけん引時の作動 ································································································ 17
4.5 自己診断の要件 ············································································································ 17
5 試験要件························································································································ 17
5.1 試験のための目標車両 ··································································································· 17
5.2 試験の環境条件 ············································································································ 17
5.3 死角警報機能の試験要件 ································································································ 17
5.4 接近車両警報機能の試験要件 ·························································································· 24
5.5 車線変更警報機能の試験要件 ·························································································· 30
附属書A(参考)死角警報事例 ······························································································ 35
D 0805:2010 (ISO 17387:2008)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人自動車技術会(JSAE)及び財団法
人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工
業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権及び出願公開後の実用新案登録出願にかかわる確認について,責
任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 0805:2010
(ISO 17387:2008)
高度道路交通システム−車線変更意思決定
支援システム−性能要件及び試験方法
Intelligent transport systems-Lane change decision aid systems
(LCDAS)-Performance requirements and test procedures
序文
この規格は,2008年に第1版として発行されたISO 17387を基に,技術的内容及び対応国際規格の構成
を変更することなく作成した日本工業規格である。
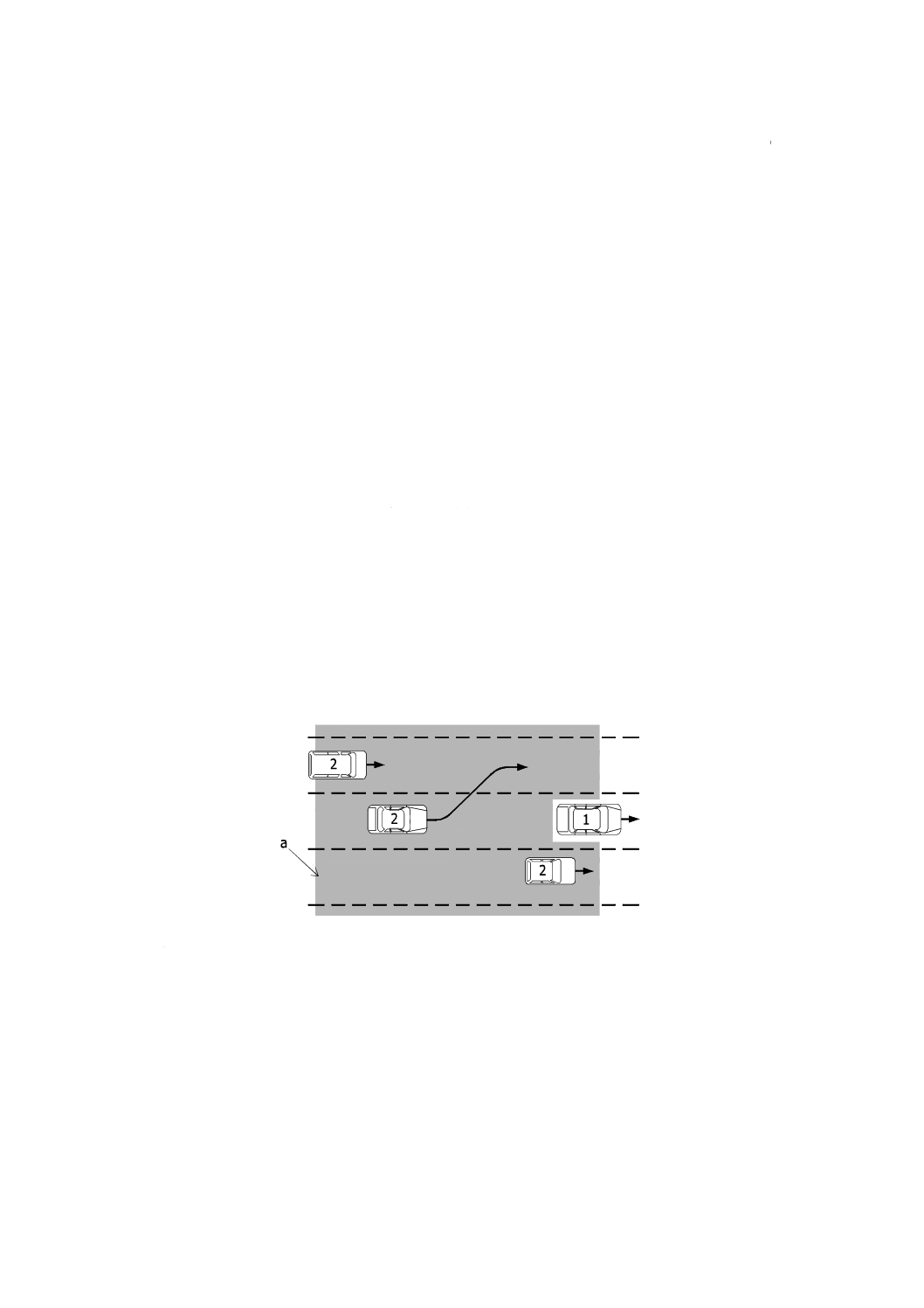
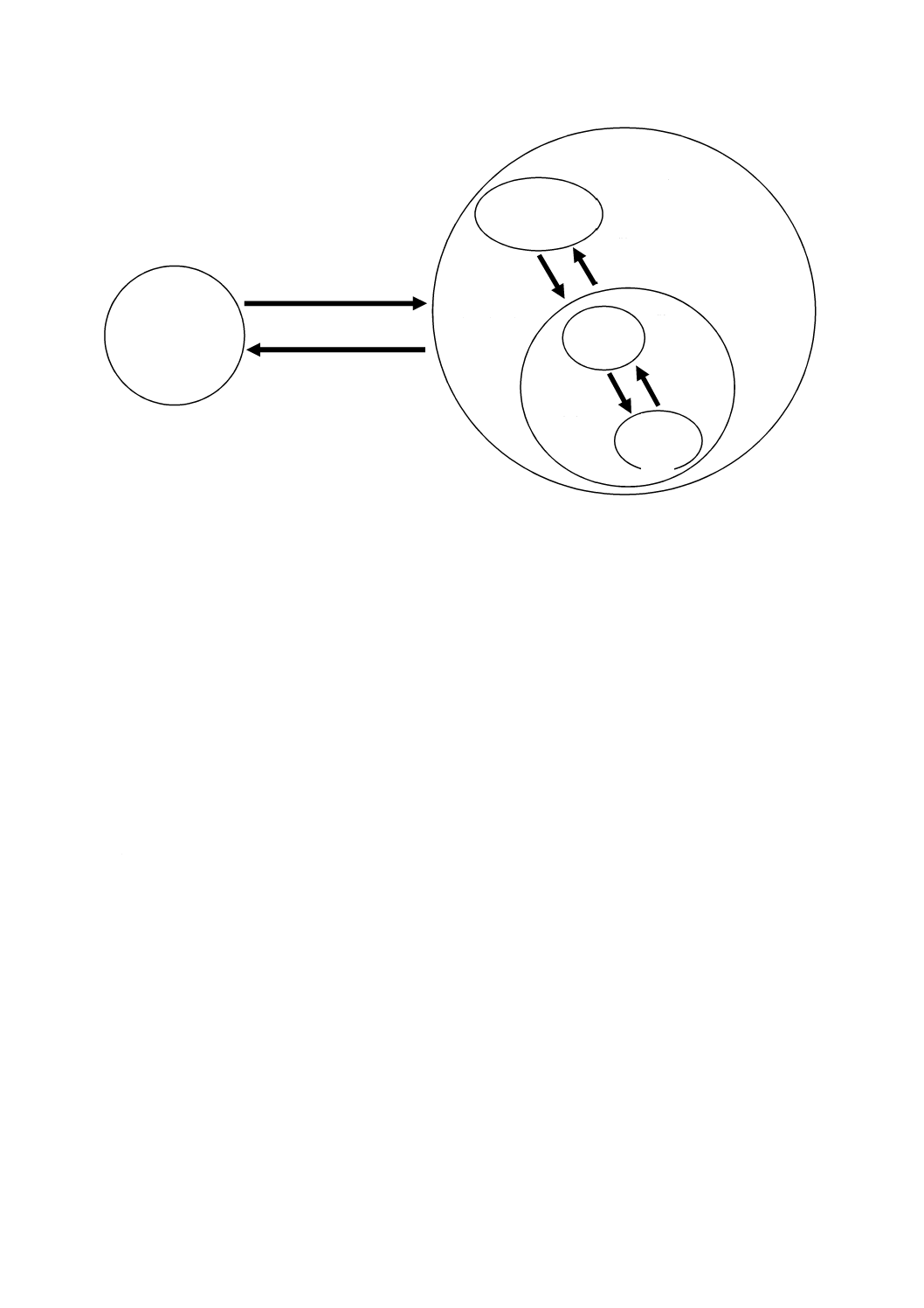
車線変更意思決定支援システム(Lane Change Decision Aid Systems:LCDASと略す。)は,車線変更時の
衝突の可能性を運転者に警告する。LCDASはバックミラー及び目視確認の補助システムであり,これら
のミラーの必要性を排除するものではない。LCDASは,当該車両の後方及び側方に存在する車両を検知
するものである(図1参照)。当該車両の運転者が車線変更の意思を示すと,システムが状況を判断し,
車線変更をすべきでない状況であれば警報を発する。LCDASは危険な運転を奨励するものではなく,警
報がないからといって安全な車線変更が可能であることを保証するものではない。システムは衝突が起こ
りそうな場合,衝突を防止するための自動的な操作は行わない。車両の安全な運行は運転者の責任である。
1
当該車両
2
LCDAS目標車両
a
塗りつぶし部分は,システムの概念の一例を示している。実際の要件は箇条5に規定する。
図1−LCDAS概念
注記 この規格に記載する各図では,車線区分線のある道路上の車両を示す。これは,車線区分線又
は車線の検知がLCDASに必要であるということを意味するわけではなく,車線区分線は参考
までに描いているにすぎない。
2
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
適用範囲
この規格は,LCDASの性能要件及び試験方法について規定する。LCDASの基本的な目的は,当該車両
と同じ方向に走行している後方及び側方に存在する車両が,当該車両の車線変更時に当該車両と衝突する
可能性を当該車両に警告することである。この規格は,高速道路及び同様の道路で前進している乗用車,
バン,バス及びトラックに装着されるシステムを対象とする。二輪車,トレーラなどの連節車両及び連節
バスへの装着は対象としない。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 17387:2008,Intelligent transport systems−Lane change decision aid systems (LCDAS)−
Performance requirements and test procedures(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
用語及び定義
この規格で用いる主な用語及び定義は,次による。
注記 監視領域の定義を示す図は,領域の概念だけを示している。実際の要件は4.2に規定する。
2.1
当該車両(subject vehicle)
当該システムを搭載した車両。
2.2
LCDAS目標車両(LCDAS target vehicle)
当該車両に後方から接近する車両,又は隣接領域の一つに位置する車両(以下,目標車両という。)。
2.3
監視領域(coverage zone)
LCDASが監視する全領域。監視領域に位置する目標車両は,システムによって検知される。システム
の監視領域は,左隣接領域,右隣接領域,左後方領域,及び右後方領域の組合せで構成する。
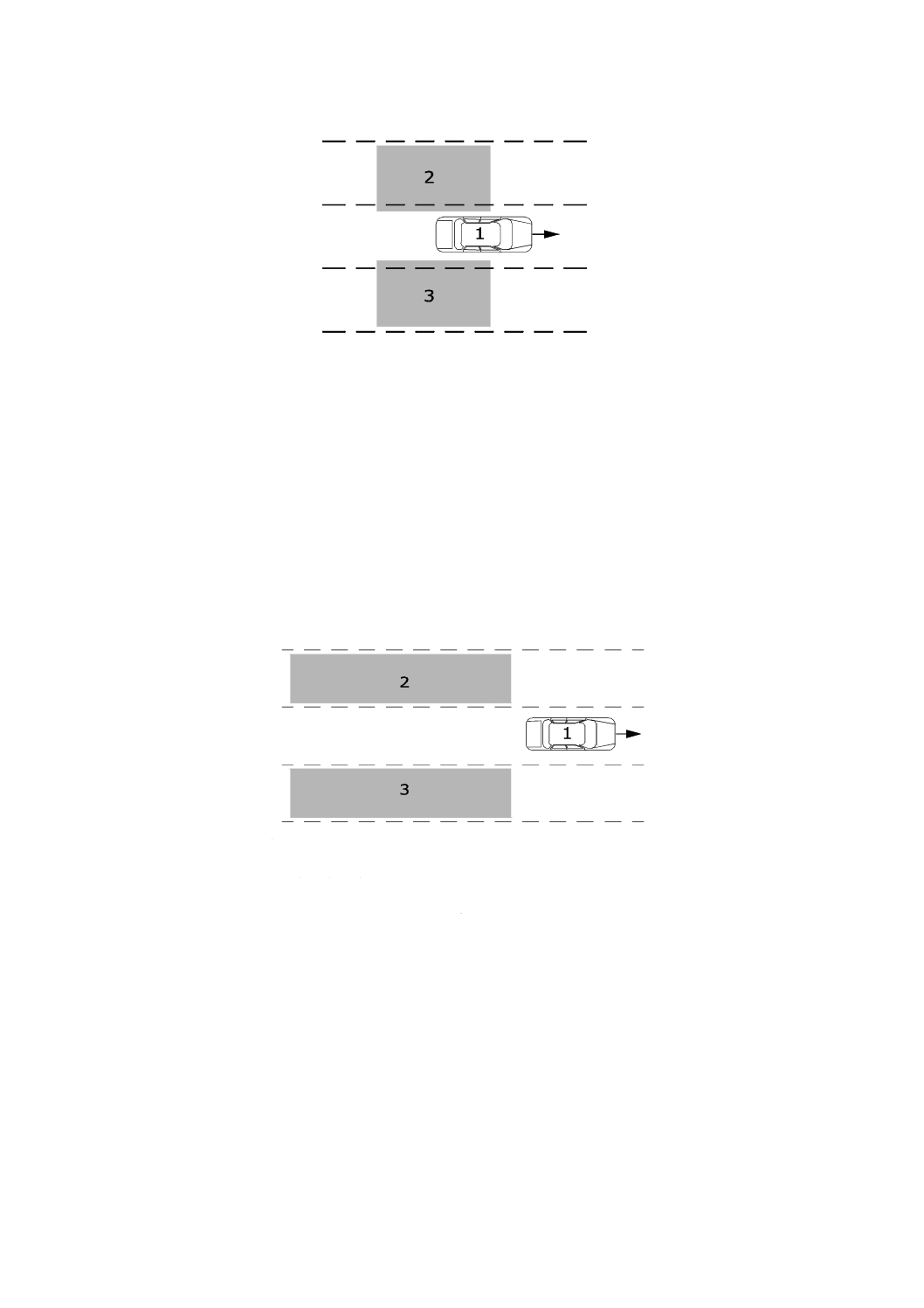
2.4
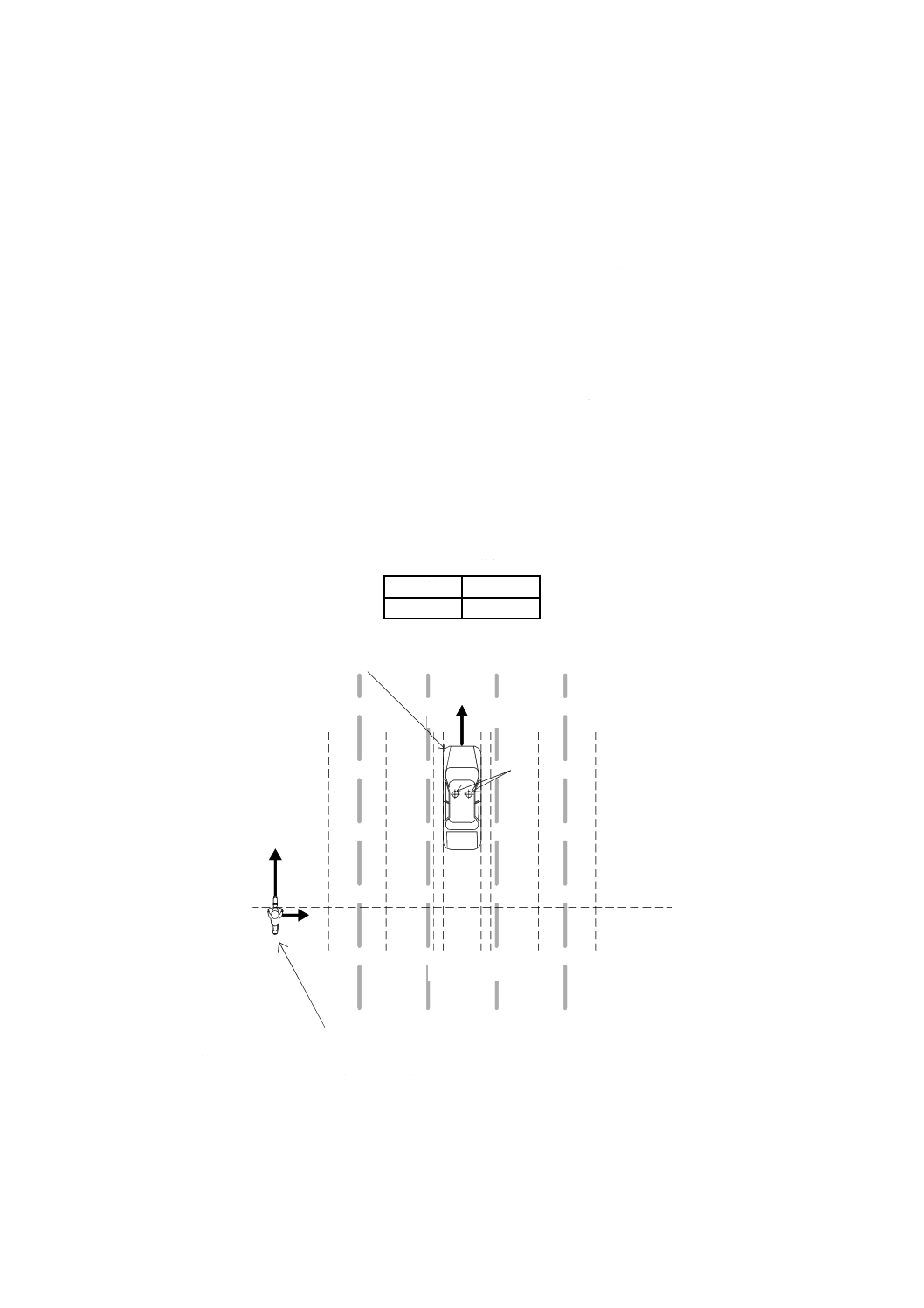
隣接領域(adjacent zones)
当該車両の右側及び左側の領域(図2参照)。隣接領域は,当該車両の隣接車線を範囲とするように意図
しているが,隣接領域の位置及び大きさは当該車両に関連して定義され,車線区分線とは無関係である。
3
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
当該車両
2
左隣接領域
3
右隣接領域
図2−隣接領域
2.5
後方領域(rear zones)
当該車両の後方の左右の領域(図3参照)。後方領域は,当該車両の隣接車線を範囲とするよう意図され
ている。後方領域の位置及び大きさは,当該車両に関連して定義されるものであって,車線区分線とは無
関係である。
1
当該車両
2
左後方領域
3
右後方領域
図3−後方領域
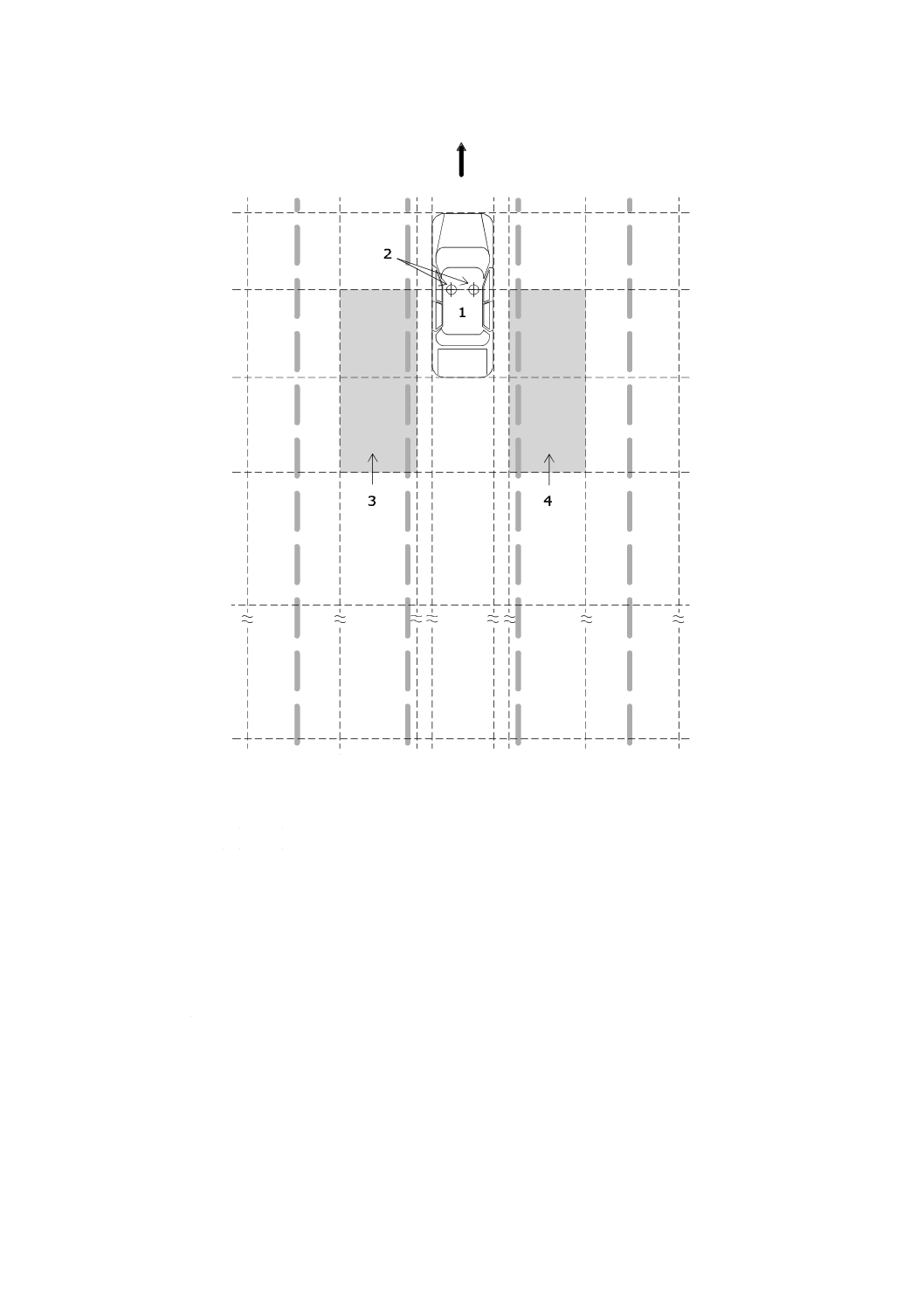
2.6
横方向車間距離(lateral clearance)
当該車両の側面と目標車両の当該車両に近い側面との間の横方向距離(図4参照)。
4
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
3
1
当該車両
2
目標車両
3
横方向車間距離
図4−横方向車間距離
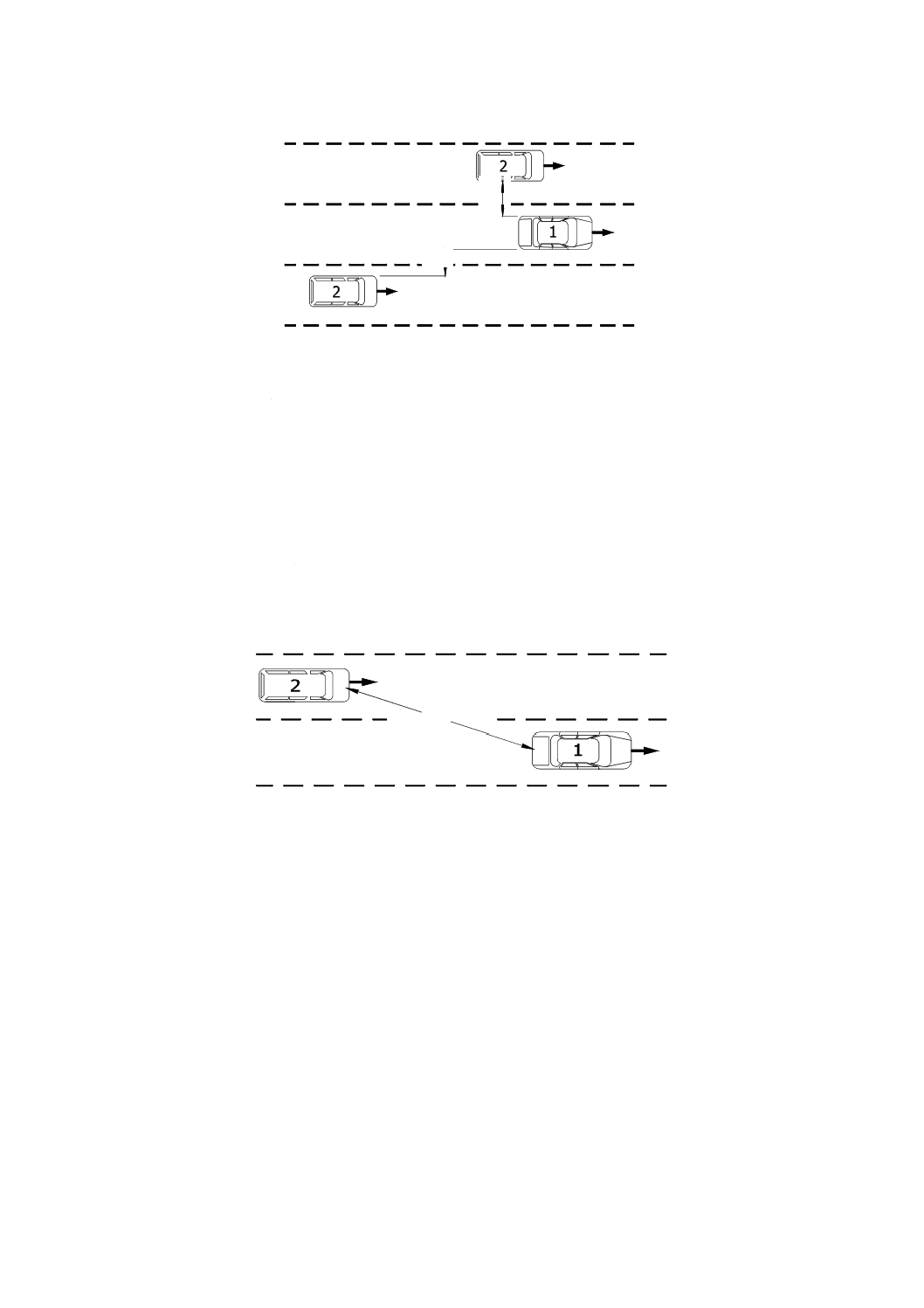
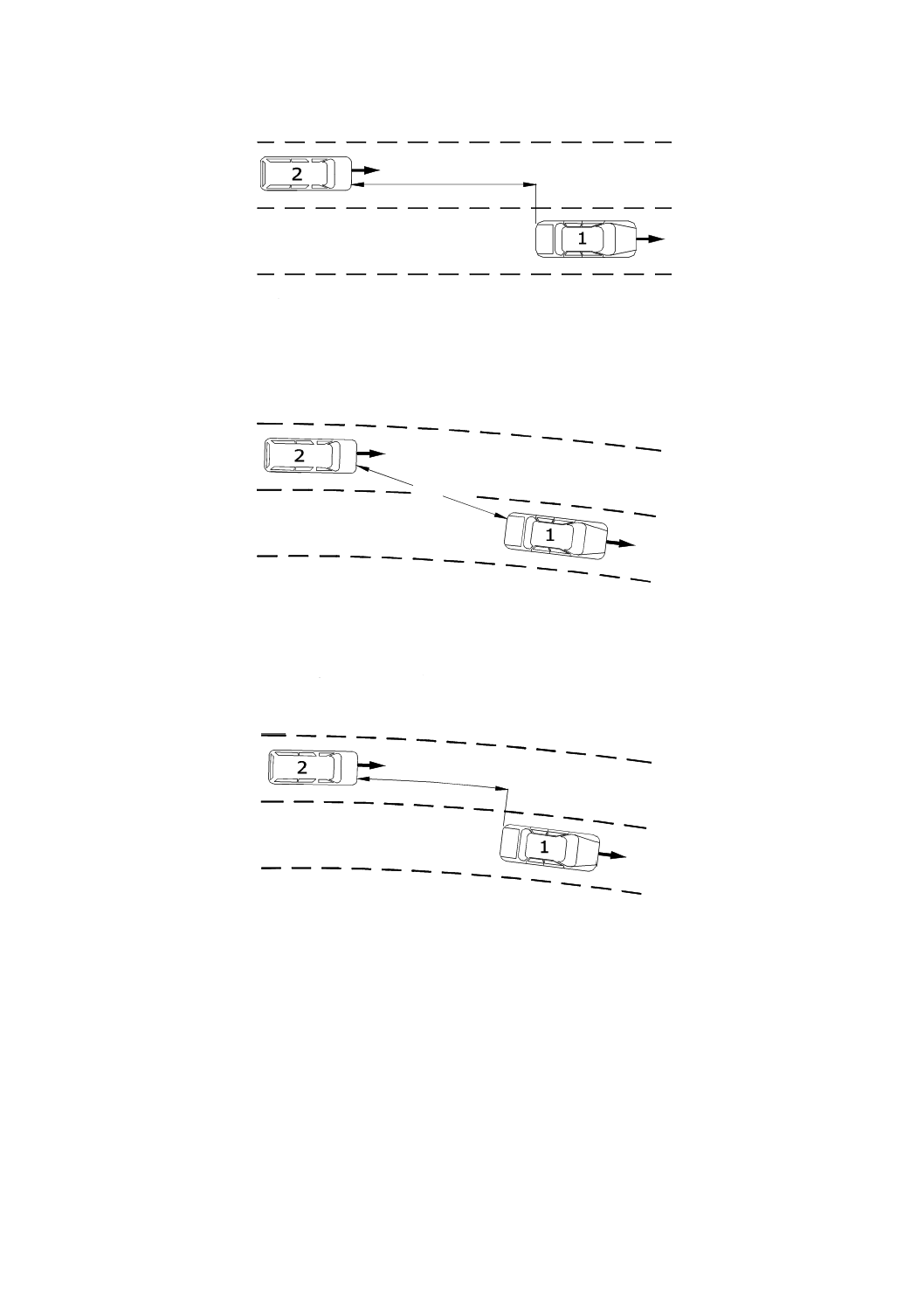
2.7
後方車間距離(rear clearance)
当該車両の後部と目標車両の最前部間との直線的測定距離,又は目標車両の推定進路を考慮した当該車
両後面と目標車両前面との道路に沿った推定距離[図5 a)〜図5 d) 参照]。この定義は,後方領域の目標
車両だけに適用する。
3
1
当該車両
2
目標車両
3
後方車間距離
a) 直線道路での後方車間距離(直線的に測定)
図5−後方車間距離の例
5
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
1
当該車両
2
目標車両
3
後方車間距離
b) 直線道路での後方車間距離(目標車両進路に沿って推定)
3
1
当該車両
2
目標車両
3
後方車間距離
c) 曲線道路での後方車間距離(直線的に測定)
3
1
当該車両
2
目標車両
3
後方車間距離
d) 曲線道路での後方車間距離(目標車両進路に沿って推定)
図5−後方車間距離の例(続き)
2.8
接近速度(closing speed)
目標車両の速度と当該車両との速度の差。この定義は,後方領域内の目標車両だけに適用する。プラス
(正)の接近速度は,目標車両が当該車両に後方から近付いていることを示す。
6
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.9
衝突までの時間(time to collision)
当該車両が目標車両の進路上に車線変更したとき,目標車両の接近速度が一定の場合に,両車両が衝突
するのに要すると推定される時間。衝突までの時間は,目標車両の後方車間距離を接近速度で除すことに
よって推定できる。この定義は,後方領域の目標車両だけに適用する。
2.10
追抜き速度(overtaking speed)
当該車両が前方に位置する車両を追い抜こうとする場合における,当該車両の速度と前方に位置する車
両の速度との差。プラス(正)の追抜き速度は,当該車両が前方に位置する車両より速く走行しているこ
とを示す。
2.11
死角警報機能(blind spot warning function)
一つ又は複数の隣接領域に目標車両が位置することを検知し,規定された要件に従って当該車両の運転
者に警報する機能。
2.12
接近車両警報機能(closing vehicle warning function)
一つ又は複数の後方領域に目標車両が位置することを検知し,規定された要件に従って当該車両の運転
者に警報する機能。
2.13
車線変更警報機能(lane change warning function)
死角警報機能及び接近車両警報機能を併せもつ機能。
2.14
道路曲率半径(roadway radius of curvature)
当該車両が走行する道路の平面曲率半径。
3
分類
3.1
監視領域によるシステムの分類
3.1.1
一般
LCDASは,表1に示すように必要な最小対象領域によって分類される。例えば,タイプIシステムは,
少なくとも左右の隣接領域の範囲に対応しなければならない。
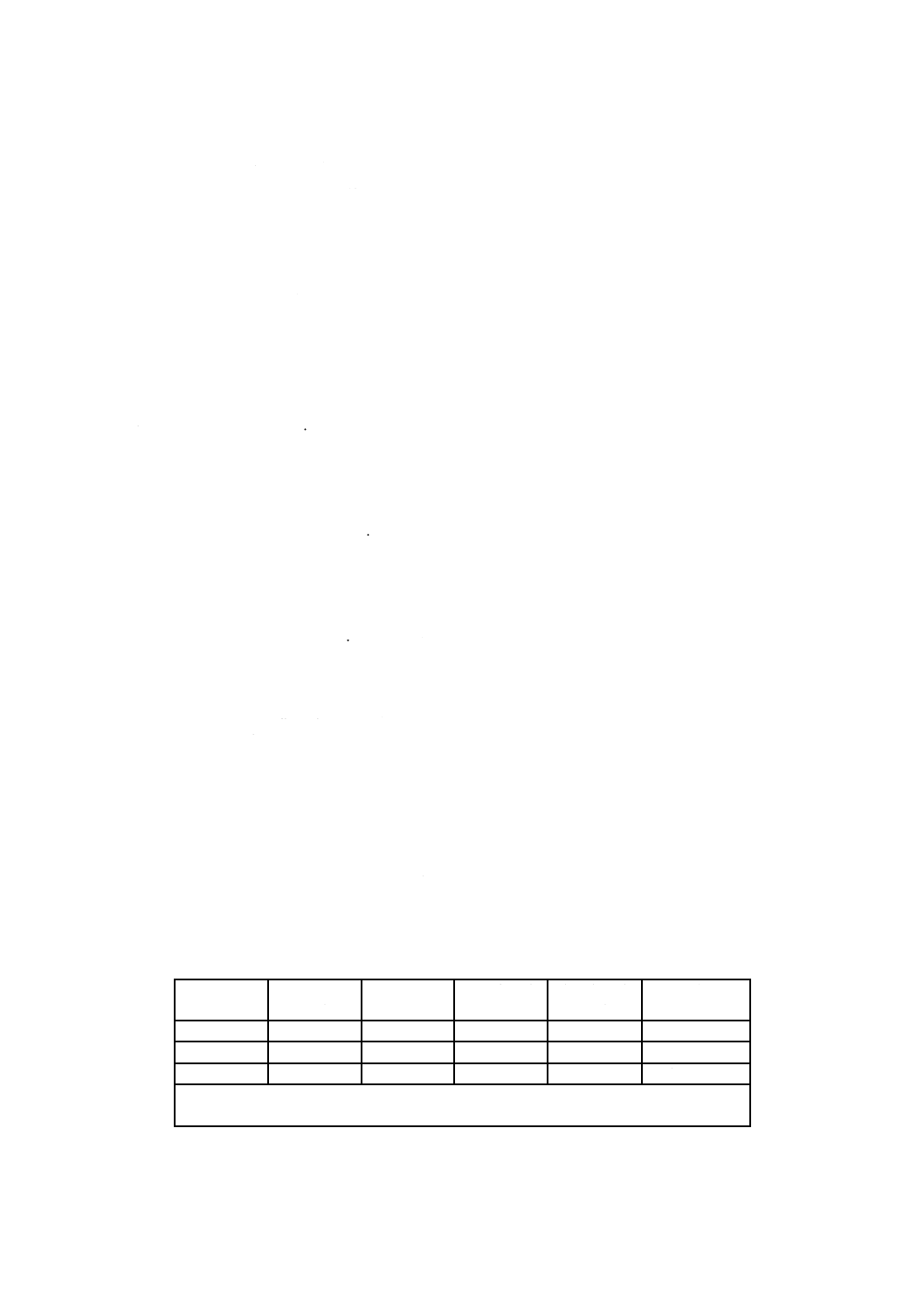
表1−サービス対象領域分類
システムの
分類
左隣接領域
の監視
右隣接領域
の監視
左後方領域
の監視
右後方領域
の監視
機能
タイプI
○
○
−
−
死角警報
タイプII
−
−
○
○
接近車両警報
タイプIII
○
○
○
○
車線変更警報
記号は,次の意味である。
○:適用する −:適用しない
7
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.2
タイプIシステム
タイプIシステムは,死角警報機能だけを提供する。このシステムの目的は,当該車両の運転者に対し
て隣接領域内の目標車両を警報することであり,後方から当該車両に接近する目標車両を警報することは
要求しない。当該車両の運転者に対しては,少なくとも取扱説明書の中で,このシステムの限界について
注意を喚起しなければならない。特に取扱説明書には,次の主旨の内容を記載しなければならない。
“このシステムは,車両付近の限られた領域だけ支援を行うが,後方から接近する車両に関しては十分
な警報を行わない場合がある。”
3.1.3
タイプIIシステム
タイプIIシステムは,接近車両警報機能だけを提供する。このシステムの目的は,当該車両の運転者に
対して,後方から当該車両に接近する目標車両を警報することである。このシステムでは,当該車両の隣
接領域内に位置する目標車両を警報することは要求しないため,タイプIIシステムの利用を推奨するのは,
左右両側で最低45°の水平視界があるサイドミラーを備えた車両である。このシステムを他の種類の車両
に利用する場合には,少なくとも取扱説明書には,次の主旨の内容を記載しなければならない。
“運転者は車線を変更しようとする前に,隣接領域の安全確認を行わなければならない。”また,当該車
両の運転者に対しては,少なくとも取扱説明書の中で,このシステムの限界について注意を喚起しなけれ
ばならない。特に取扱説明書には,次の主旨の内容を記載しなければならない。
“このシステムは,当該車両付近の隣接領域には支援を提供しないので,後方から急速に接近する車両
に関しては十分な警報を行わない場合がある。”
3.1.4
タイプIIIシステム
タイプIIIシステムは,死角警報機能及び接近車両警報機能を提供する。このシステムの目的は,当該車
両の運転者に対して,隣接領域内の目標車両及び後方から当該車両に接近する目標車両を警報することで
ある。当該車両の運転者に対しては,少なくとも取扱説明書の中で,このシステムの限界について注意を
喚起しなければならない。特に取扱説明書には,次の主旨の内容を記載しなければならない。
“このシステムは,後方から急速に接近する車両に関しては十分な警報を行わない場合がある。”
3.2
目標車両の接近速度による分類
3.2.1
一般
3.1に規定するタイプII及びタイプIIIのLCDASは,表2に規定する目標車両の接近速度の最高値及び
道路の曲率半径の最小値によって分類される。システムは,表2に掲げる複数のタイプに属する可能性が
あることに注意する必要がある。例えば,高性能なシステムは,タイプA〜タイプCそれぞれに規定され
る最低要件を満たすか,又はそれを超える場合がある。
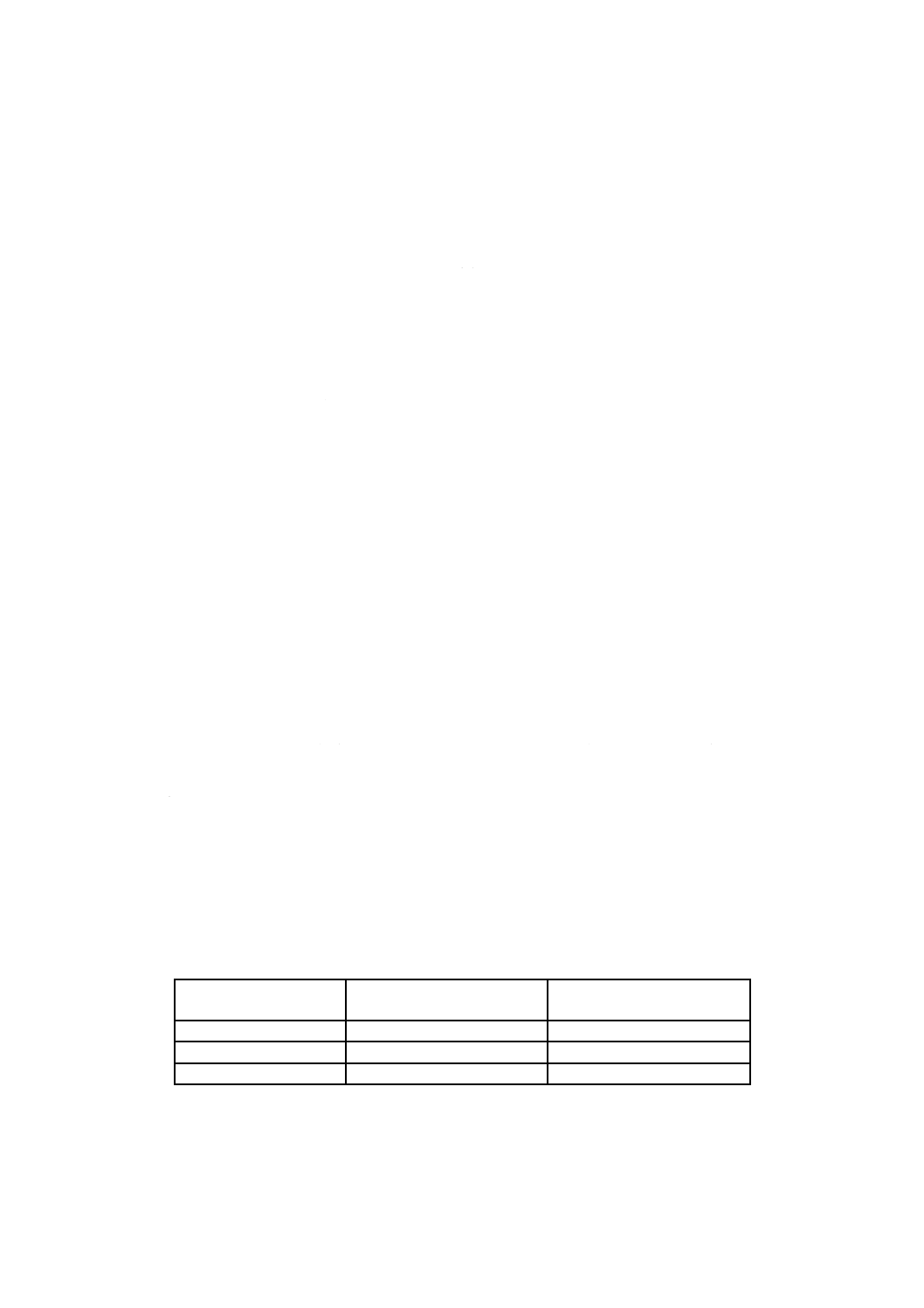
表2−目標車両の接近速度による分類
システムの分類タイプ
目標車両の接近速度の最高値
m/s
道路の曲率半径の最小値
m
タイプA
10
125
タイプB
15
250
タイプC
20
500
注記 目標車両の接近速度の最高値は,必要な検出範囲又は捕そく(捉)時間に直接影響する。接近
速度が速くなれば,目標車両を早く検知して当該車両の運転者に警報できるよう,センサ範囲
8
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を広げるか,又は捕そく時間を短縮する必要がある。さらに,目標車両の接近速度の最高値及
び道路の曲率半径の最小値に関係がある。特定の曲率半径及び通常の当該車両の速度について,
目標車両の接近速度は,車両の走行特性によって制約を受ける。
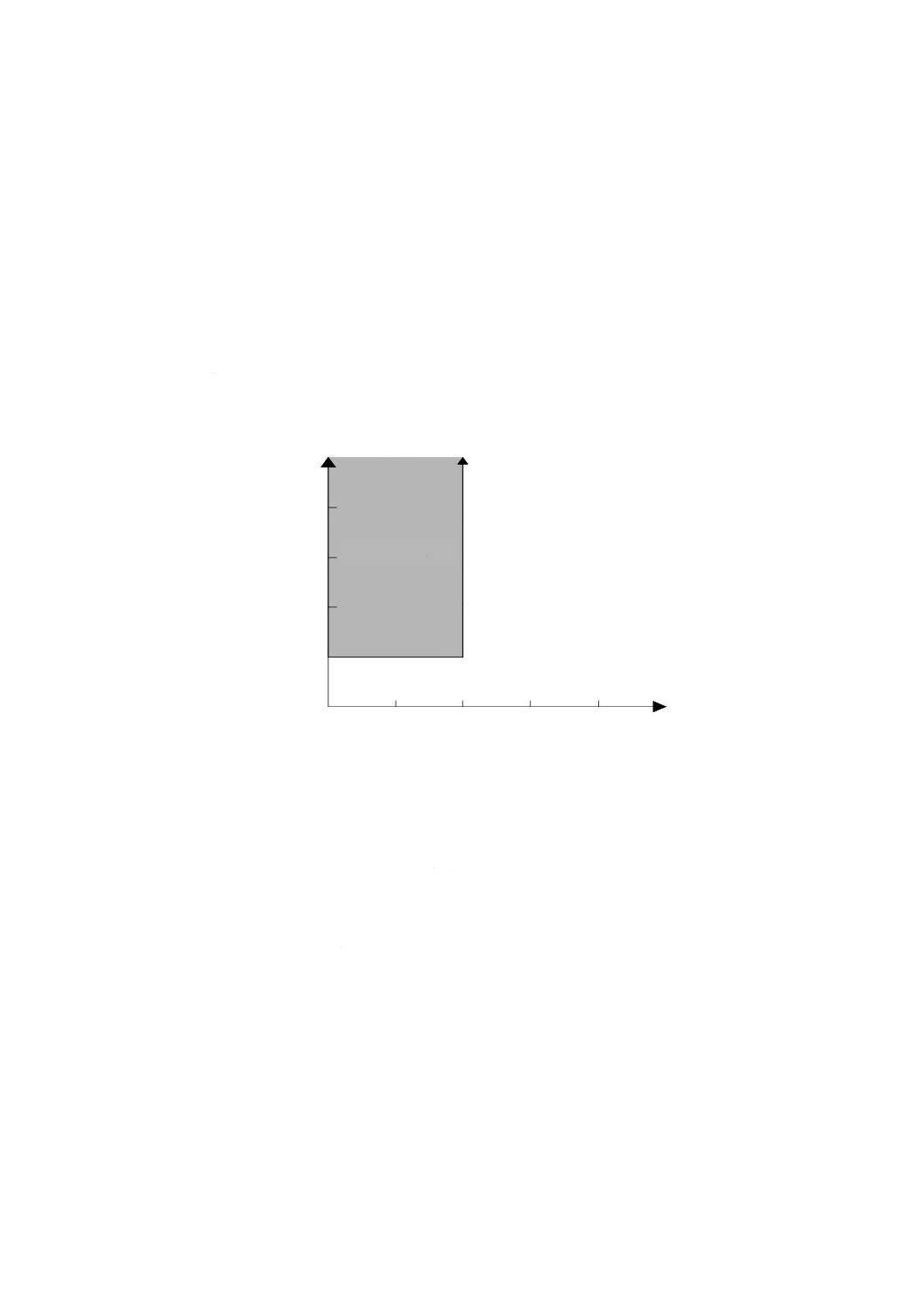
3.2.2
タイプAシステム
図6は,道路の曲率半径及び目標車両の接近速度に関するタイプAシステムに要求される最小機能範囲
を示す。このシステムは,小さい曲率半径の曲線道路で運用することができる。当該車両の運転者に対し
ては,少なくとも取扱説明書の中で,このシステムの限界について次の主旨の内容を記載し,注意を喚起
しなければならない。
“曲率半径がX mより小さな曲線道路において,このシステムは十分に警報できない場合がある。”
ここでXは,曲率半径が125 m未満で設計されたシステムの場合,より小さな曲率半径に置き換えられ
る。
Target vehicle closing speed, m/s
R
o
a
d
w
a
y
ra
d
iu
s
o
f
cu
rv
a
tu
re
,
m
5
20
15
10
125
500
250
375
Type A
図6−タイプAシステムの最小機能範囲
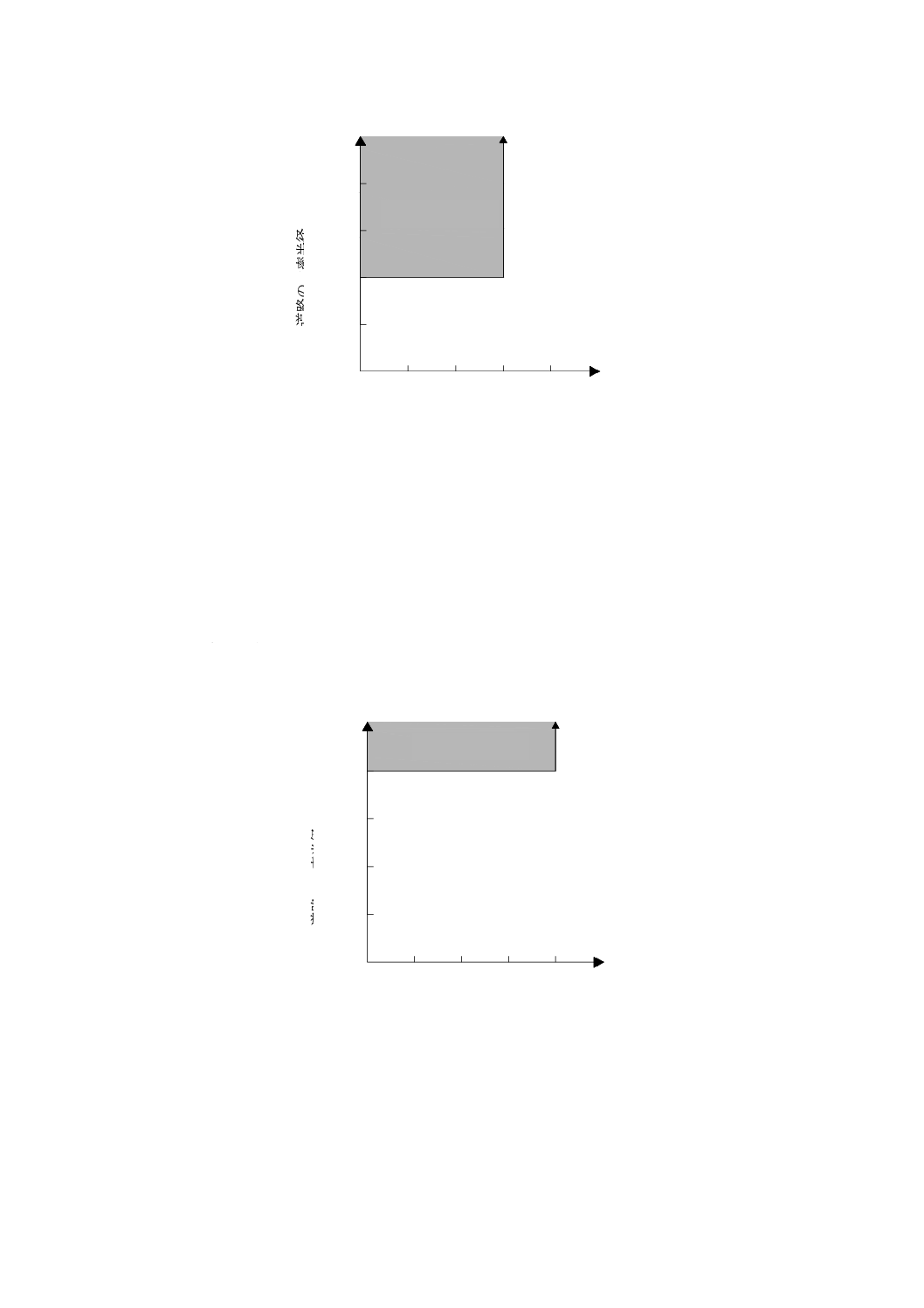
3.2.3
タイプBシステム
図7は,道路の曲率半径及び目標車両の接近速度に関するタイプBシステムに要求される最小機能範囲
を示す。このシステムは,小さい曲率半径の曲線道路で運用することができる。当該車両の運転者に対し
ては,少なくとも取扱説明書の中で,このシステムの限界について次の主旨の内容を記載し,注意を喚起
しなければならない。
“曲率半径がX mより小さな曲線道路において,このシステムは十分に警報できない場合がある。”
ここでXは,曲率半径が250 m未満で設計されたシステムの場合,より小さな曲率半径に置き換えられ
る。
目標車両の接近速度 (m/s)
道
路
の
曲
率
半
径
(
m
)
タイプA
9
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Target vehicle closing speed, m/s
R
o
a
d
w
a
y
ra
d
iu
s
o
f
cu
rv
a
tu
re
,
m
5
20
15
10
125
500
250
375
Type B
図7−タイプBシステムの最小機能範囲
3.2.4
タイプCシステム
図8は,道路の曲率半径及び目標車両の接近速度に関するタイプCシステムに要求される最小機能範囲
を示す。このシステムは,小さい曲率半径の曲線道路で運用することができる。当該車両の運転者に対し
ては,少なくとも取扱説明書の中で,このシステムの限界について次の主旨の内容を記載し,注意を喚起
しなければならない。
“曲率半径がX mより小さな曲線道路において,このシステムは十分に警報できない場合がある。”
ここでXは,曲率半径が500 m未満で設計されたシステムの場合,より小さな曲率半径に置き換えられ
る。
Target vehicle closing speed, m/s
R
o
a
d
w
a
y
r
a
d
iu
s
o
f
cu
rv
a
tu
re
,
m
5
20
15
10
125
500
250
375
Type C
図8−タイプCシステムの最小機能範囲
4
機能要件
4.1
LCDAS機能状態図
4.1.1
一般
LCDASは,図9の機能状態図に従って,作動しなければならない。
道
路
の
曲
率
半
径
(
m
)
目標車両の接近速度 (m/s)
タイプB
目標車両の接近速度 (m/s)
道
路
の
曲
率
半
径
(
m
)
タイプC
10
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図9−LCDAS機能状態図
4.1.2
LCDAS非作動状態
LCDAS非作動状態では,システムは運転者にいかなる警報も発してはならない。この状態は電源が入
っていない,又は準備完了状態の場合がある。準備完了状態では,システムは目標車両を検知してもよい
が,起動基準を満たしていないため,警報を発してはならない。
4.1.3
起動基準
4.1.3.1
一般
LCDASは起動基準を満たしたとき,非作動状態から作動状態へと移行しなければならない。複数の起
動基準を同時に設けてもよい。その場合に考えられる起動基準には,次のものがあるが,必ずしも限定さ
れない。
4.1.3.2
常時起動
システムは常に作動状態にあってもよい(当該車両のイグニションがオンのときは,常に作動状態であ
る。)。
4.1.3.3
手動式スイッチ起動
システムは,手動で起動してもよい。例えば,トグルスイッチ,チップスイッチ,メニューベースのユ
ーザインタフェースなど。
4.1.3.4
方向指示器起動
システムは,当該車両の方向指示器の状態に基づいて起動してもよい。例えば,方向指示器が左に曲が
ることを示す場合,システムは当該車両の右側が起動しない状態のまま,左側は起動してもよい。
4.1.3.5
当該車両速度起動
システムは,当該車両の速度に基づいて起動してもよい。当該車両の速度があるしきい値と同じ又は高
いとき,システムが作動する。この場合,しきい値は16.7 m/s(60 km/h)を超えてはならない。
LCDAS
非作動状態
LCDAS
作動状態
非警報
警報要件
不満足
警報要件
満足
(4.2参照)
警報
警報
レベル1
警報
レベル2
以上
評価基準
不適合
評価基準
適合
起動基準不適合
起動基準適合
11
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.1.4
LCDAS作動状態
4.1.4.1
一般
LCDAS作動状態では,システムは目標車両を検知しなければならない。
4.1.4.2
非警報状態
非警報状態では,システムは作動中であるが,警報要件(4.2参照)を満たしていない。
4.1.4.3
警報状態
4.1.4.3.1
一般
警報状態では,システムが作動中であり,警報要件を満たしている。
4.1.4.3.2
警報レベル1状態
警報レベル1の状態では,警報要件を満たしているが,評価基準を満たしていない。この状態で運転者
に発する警報は,警報レベル2の警報及びそれ以上のレベルの警報と比較して,緊急を要しない警報でな
ければならない。
4.1.4.3.3
評価基準
4.1.4.3.3.1
一般
評価基準は,LCDASが監視するある種のパラメータである。評価基準は,運転者が車線変更を取りや
める意思決定をする上で役に立つものでなければならない。この評価基準が一つ又は複数満たされれば,
システムは警報レベル1から警報レベル2以上へと移行してよい。幾つかの評価基準は,同時に用いても
よい。考えられる評価基準には,次のものがあるが,それに限定されるわけではない。
4.1.4.3.3.2
方向指示器評価
システムは,当該車両の方向指示器の状態を判断してもよい。右方向指示器がオンの場合,システムは,
左側の警報出力に影響を与えることなく当該車両の右側で警報レベル2か,又はそれ以上のレベルへ移行
してもよい。
4.1.4.3.3.3
ステアリング操作入力評価
システムは,当該車両の運転者のステアリング操作入力を検知してもよい。例えば,運転者が右車線へ
の変更を開始すると判断した場合,システムは左側の警報出力に影響を及ぼすことなく,当該車両の右側
は警報レベル2か,又はそれ以上のレベルへ移行してもよい。
4.1.4.3.3.4
車線位置評価
システムは,当該車両の位置及び車線内の横方向への動きを判断してもよい。例えば,当該車両が右車
線へ向かう又はその車線内へ移動すると判断した場合,システムは左側の警報出力に影響を及ぼすことな
く,当該車両の右側は警報レベル2か,又はそれ以上のレベルへ移行してもよい。
4.1.4.3.3.5
横方向車間距離評価
システムは,目標車両との横方向車間距離を判断してもよい。システムに横方向車間距離を測定する性
能がある場合,横方向車間距離が設定しきい値未満であれば,システムは警報レベル2か,又はそれ以上
のレベルへ移行してもよい。
4.1.4.3.4
警報レベル2以上
警報レベル2以上はオプションである。警報レベル2以上の状態では,警報要件が満たされ,評価基準
も一つ以上満たされている。この状態で運転者に出される警報は差し迫った警報で,警報レベル1の警報
よりも緊急を要するものでなければならない。
12
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2
警報要件
4.2.1
一般
LCDASがもつ要件は,次による。
なお,図10で示す次のラインは,死角警報の要件及び接近車両警報の要件を説明するために用いる。右,
左及び後方の表現は,当該車両の進行方向を基準にしたものである。また,図の車線区分線は参考とする。
− ラインAは,当該車両の後端と平行で後端から後方30 mの距離にあるものとする。
− ラインBは,当該車両の後端と平行で後端から後方3 mの距離にあるものとする。
− ラインCは,当該車両の前端と平行で全視点範囲の95 %タイルの中心に位置するものとする。
− ラインDは,当該車両の前端の両方向へ延長するものとする。
− ラインEは,当該車両の中心線と平行でバックミラーを除く当該車両の左端に位置するものとする。
− ラインFは,当該車両の中心線と平行で当該車両の左端から0.5 mの距離にあるものとする。
− ラインGは,当該車両の中心線と平行で当該車両の左端から3 mの距離にあるものとする。
− ラインHは,当該車両の中心線と平行で当該車両の左端から6 mの距離にあるものとする。
− ラインJは,当該車両の中心線と平行でバックミラーを除く当該車両の右端に位置するものとする。
− ラインKは,当該車両の中心線と平行で当該車両の右端から0.5 mの距離にあるものとする。
− ラインLは,当該車両の中心線と平行で当該車両の右端から3 mの距離にあるものとする。
− ラインMは,当該車両の中心線と平行で当該車両の右端から6 mの距離にあるものとする。
− ラインNは,当該車両の後端の両方向へ延長するものとする。
− ラインOは,当該車両の後端と平行でその後方10 mの距離にあるものとする。
13
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A
A
B
B
H
H
G
G
F
F
E
E
J
J
K
K
L
L
M
M
C
C
N
N
D
D
O
O
1
当該車両
2
全視点範囲の95 %タイルの中心
3
左隣接領域
4
右隣接領域
図10−警報要件図
4.2.2
検知可能な最小目標車両
LCDASは,高速道路及び同様の道路で走行を認めた二輪車に,運転者が乗った状態と同じ大きさの目
標車両を検知する性能をもたなければならない。
4.2.3
死角警報機能の要件
4.2.3.1
死角警報機能の警報要件
4.2.3.1.1
一般
死角警報機能は,左右の隣接領域を対象とする。隣接領域を対象とすることは,当該車両のバックミラ
ーの代用をするものではなく,バックミラーによる視界を補完するためである。
なお,死角警報事例を附属書Aに示す。
14
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2.3.1.2
左側死角警報の要件
図10において,目標車両が次の条件をすべて満たす場合,左側死角警報を当該車両の運転者に発しなけ
ればならない。
− 目標車両の一部又は全部がラインBの前方にある。
− 目標車両全体がラインCの後方にある。
− 目標車両全体がラインFの左側にある。
− 目標車両の一部又は全部がラインGの右側にある。
ラインA,D,E及びHが規定する領域に,目標車両がない場合には,左側死角警報を発してはならな
い。
4.2.3.1.3
右側死角警報の要件
図10において,目標車両が次の条件をすべて満たす場合,右側死角警報を当該車両の運転者に発しなけ
ればならない。
− 目標車両の一部又は全部がラインBの前方にある。
− 目標車両全体がラインCの後方にある。
− 目標車両全体がラインKの右側にある。
− 目標車両の一部又は全部がラインLの左側にある。
ラインA,D,J及びMが規定する領域に,目標車両がない場合には,右側死角警報を発してはならな
い。
4.2.3.2
死角警報の抑制(オプション)
当該車両が前方に位置する車両を追い抜こうとし,前方に位置する車両が隣接領域に移動してきた場合,
死角警報は,最初の死角警報要件が満たされてから2 s以内は抑制してもよい。
4.2.4
接近車両警報機能の要件
4.2.4.1
接近車両警報機能の警報要件
4.2.4.1.1
一般
接近車両警報機能は,左右の後方領域を対象とする。道路の形状を推定することが可能なシステムでは,
図10に示すラインは,道路の曲線に沿って定義してもよい。
4.2.4.1.2
左側接近車両警報の要件
図10において,目標車両が次の条件をすべて満たす場合,左側接近車両警報を当該車両の運転者に発し
なければならない。
− 目標車両全体がラインBの後方にある。
− 目標車両全体がラインFの左側にある。
− 目標車両の一部又は全部がラインGの右側にある。
− 目標車両の衝突までの時間が,表3に規定した数値以下とする。
表3−目標車両接近速度分類による接近車両警報の衝突までの時間
システムの分類
最大限機能を発揮するための
目標車両の接近速度の最高値
m/s
衝突までの最小時間
s
タイプA
10
2.5
タイプB
15
3.0
タイプC
20
3.5
15
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ラインAより後方の左後方領域内の目標車両については,衝突までの時間が7.5 s以上のとき,左側接
近車両警報を発してはならない。
ラインA上又はラインAより前方に位置する目標車両が,次の条件のいずれかを満たす場合,左側接近
車両警報を発してはならない。
− 目標車両全体がラインNの前方にある。
− 目標車両のいかなる部分もラインEとラインHとの間の領域にない。
4.2.4.1.3
右側接近車両警報の要件
図10において,目標車両が次の条件をすべて満たす場合,右側接近車両警報を当該車両の運転者に発し
なければならない。
− 目標車両全体がラインBの後方にある。
− 目標車両全体がラインKの右側にある。
− 目標車両の一部又は全部がラインLの左側にある。
− 目標車両の衝突までの時間が,表3に規定した数値以下とする。
ラインAより後方の右後方領域内の目標車両については,衝突までの時間が7.5 s以上のとき,右側接
近車両警報を発してはならない。
ラインA上又はラインAより前方に位置する目標車両が,次の条件のいずれかを満たす場合,右側接近
車両警報を発してはならない。
− 目標車両全体がラインNの前方にある。
− 目標車両のいかなる部分もラインJとラインMとの間の領域にない。
4.2.4.1.4
両側接近車両の警報(オプション)
図10において,目標車両が次の条件をすべて満たす場合,当該車両の両側の接近車両警報を同時に発し
てもよい。
− 左側接近車両警報の要件を満たしておらず,現在必要としない(4.2.4.1.2を参照)。
− 右側接近車両警報の要件を満たしておらず,現在必要としない(4.2.4.1.3を参照)。
− 目標車両の一部又は全部がラインEとラインJとの間の領域にある。
− 目標車両全体がラインOの後方にある。
− 目標車両の衝突までの時間が,表3に規定した数値以下とする。
4.2.4.2
接近車両情報(オプション)
視覚による目標車両の情報(例えば,目標車両の位置,接近速度など)は,その情報が警報と明確に区
別できる場合,いつでも当該車両の運転者に提供してもよいが,この情報が警報の表示と明確に区別でき
ることを条件とする。
4.2.5
車線変更警報機能の要件
4.2.5.1
車線変更警報機能の警報要件
車線変更警報機能の警報要件は,死角警報機能の警報要件及び接近車両警報機能の警報要件を組み合わ
せたもので,表4に示す。
16
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4−車線変更警報要件
試験条件
死角警報
警報が必要な場合
警報してもよい場合
警報してはならない場合
接
近
車
両
警
報
警報が必要な
場合
○
○
○
警報しても
よい場合
○
△
△
警報しては
ならない場合
○
△
×
記号は,次の意味である。
○:車線変更警報を発しなければならない
△:車線変更警報を発してもよい
×:車線変更警報を発してはならない
4.2.6
システムの応答時間
目標車両が警報要件を満たした時点から警報を発するまでのすべてを含めたシステムの応答時間は,
0.3 sを超えないものとする。警報を禁止する条件を満たした時点から,警報を解除するまでのすべてを含
めたシステム応答時間は,1 sを超えないものとする。
4.3
ユーザインタフェース
4.3.1
状態表示
4.3.1.1
一般
LCDASの作動状態表示の方法は,運転者操作部の表示又は“作動・非作動”目視表示装置の二つの可
能性があり,少なくとも一つを表示しなければならない。
4.3.1.2
運転者選択の表示
運転者がシステムを手動で起動又は解除できる場合,操作部に運転者の選択内容を表示しなければなら
ない。この表示は,容易に目で見ることができるものでなければならない。システムを手動で起動及び解
除する手段がスイッチであり,運転者がスイッチ位置で起動か又は解除かを明確に把握できるならば,ス
イッチをこの表示器とみなしてもよい。
4.3.1.3
作動・非作動の表示
運転者が手動で操作できないシステムは,作動状態か又は非作動状態かを表示しなければならない(4.1
参照)。この表示は,容易に目で見ることができるものでなければならない。
4.3.2
警報表示
4.3.2.1
一般
LCDAS警報の表示は,車線変更操作が危険な状況につながるおそれがあることを,当該車両の運転者
に示すものでなければならない(4.1参照)。
4.3.2.2
警報表示の方法
LCDAS警報レベル1の状態(4.1参照)では,警報表示は,目視表示だけでなければならないが,警報
レベル2以上の状態(4.1参照)では,警報表示は,目視表示,音声若しくは触覚のいずれか又はそれらの
組合せとする。警報は,目標車両が位置する側を示すことが望ましい。また,目視警報表示はバックミラ
ーの利用を促す場所に設置されることが望ましく,目視警報は,運転者が車両内の他の目視情報と明確に
区別できなければならない。聴覚的警報を使用する場合は,車両内の他の音声信号と明確に区別できなけ
ればならない。触覚による警報を使用する場合は,車両内の他の触覚信号と区別できなければならない。
17
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.3.3
故障表示
故障表示は,LCDAS自己診断機能(4.5参照)によって,システムの異常を検知したことを当該車両の
運転者に示さなければならない。
LCDAS故障表示は目視表示又は音声とし,システムの故障を運転者に明確に伝えるものでなければな
らない。
4.4
トレーラけん引時の作動
図10の各ラインは,連結するトレーラに対して規定するものではなく,トレーラをけん引する当該車両
を基準に規定する。トレーラが当該車両に連結される場合,LCDASは次のオプション順に従って運用さ
れなければならない。
a) システムは,トレーラをけん引していないときの性能で機能する(システムの対象範囲が拡大されて,
トレーラを含むことにはならない。)。
b) システムがトレーラをけん引していないときの性能を発揮できない場合,運転者に対して,システム
が利用できない又は動作しないことを表示する。
c) システムが正しく機能しない場合,当該車両の取扱説明書には,トレーラをけん引する間,システム
が正しく機能しない旨の記載をする。
4.5
自己診断の要件
システムは,最低限,次の自己診断機能をもち,自動的に確認しなければならない(少なくとも毎回の
起動後)。
− 主要電子部品の適切な機能
− すべてのセンサ素子の適切な機能
システムが故障状態を検知したときは,必ずLCDAS故障表示をしなければならない。
5
試験要件
5.1
試験のための目標車両
目標車両は運転者が乗った二輪車とする。試験に用いる目標車両の寸法は,長さ2 m〜2.5 m,幅(バッ
クミラーを含めない最も広いところ)0.7 m〜0.9 m,高さ(風防を含まない。)1.1 m〜1.5 mとする。
5.2
試験の環境条件
試験道路の表面は,平たんで乾いたアスファルト舗装面又はコンクリート舗装面とする。試験期間中の
外気温度は10 ℃±30 ℃とする。水平方向の視程は,1 000 m以上とする。
5.3
死角警報機能の試験要件
5.3.1
一般
死角警報機能(LCDASタイプI:表1参照)に対する最小限の試験要件を,次に規定する。
5.3.2
死角警報試験測定要件
死角警報試験は,次の要件を満たさなければならない。
a) 死角警報試験装置は,試験対象の死角警報システムとは完全に独立している。
b) 試験目標車両が当該車両の後方に走行する場合,当該車両の後端と試験目標車両の前端との縦方向距
離の測定が可能である。
c) 試験目標車両が当該車両の前方に走行する場合,当該車両の前端と試験目標車両の後端との縦方向距
離の測定が可能である。
d) 試験目標車両が当該車両の左側に走行する場合,当該車両の最左端と試験目標車両の最右端との横方
18
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
向距離の測定が可能である。
e) 試験目標車両が当該車両の右側に走行する場合,当該車両の最右端と試験目標車両の最左端との横方
向距離の測定が可能である。
f)
試験目標車両が警報条件を満たす時点から,警報を発する時点までの時間間隔の測定が可能である。
g) 警報が許可されない時点から警報が終了した時点までの時間間隔の測定が可能である。
なお,すべての試験手順に関して,測定装置は,次の精度を満たさなければならない。
h) 距離測定精度
− 2 m未満の距離については,精度は0.1 m以下とする。
− 2 mから10 mまでの距離については,精度は5 %以内とする。
− 10 mを超える距離については,精度は0.5 m以下とする。
i)
時間測定精度
− 200 ms未満の時間については,精度は20 ms以下とする。
− 200 msから1 sまでの時間については,精度は10 %以内とする。
− 1 sを超える時間については,精度は100 ms以下とする。
5.3.3
死角警報試験手順
5.3.3.1
一般
次の試験は,関連するすべての起動基準を満たさなければならない。
5.3.3.2
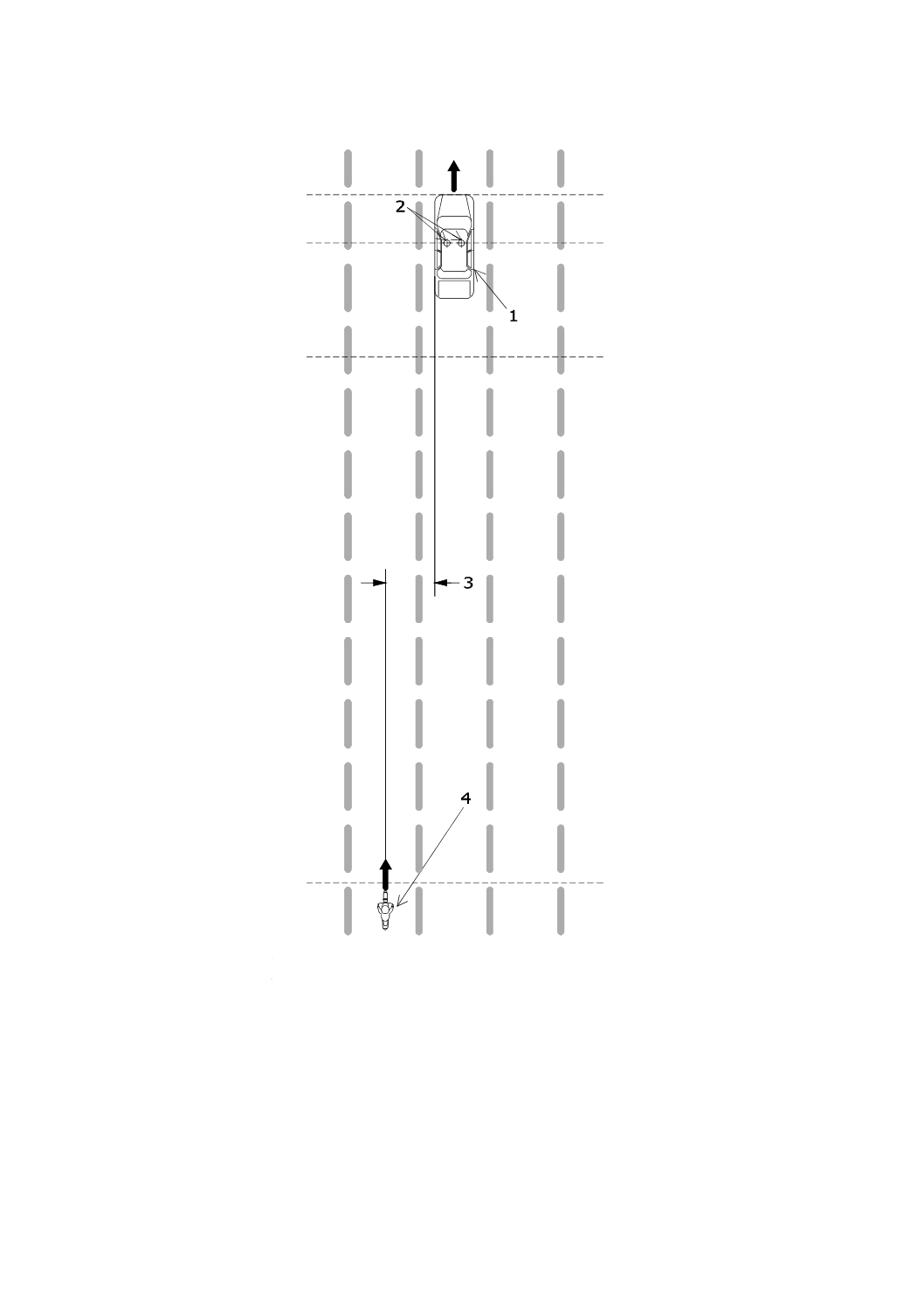
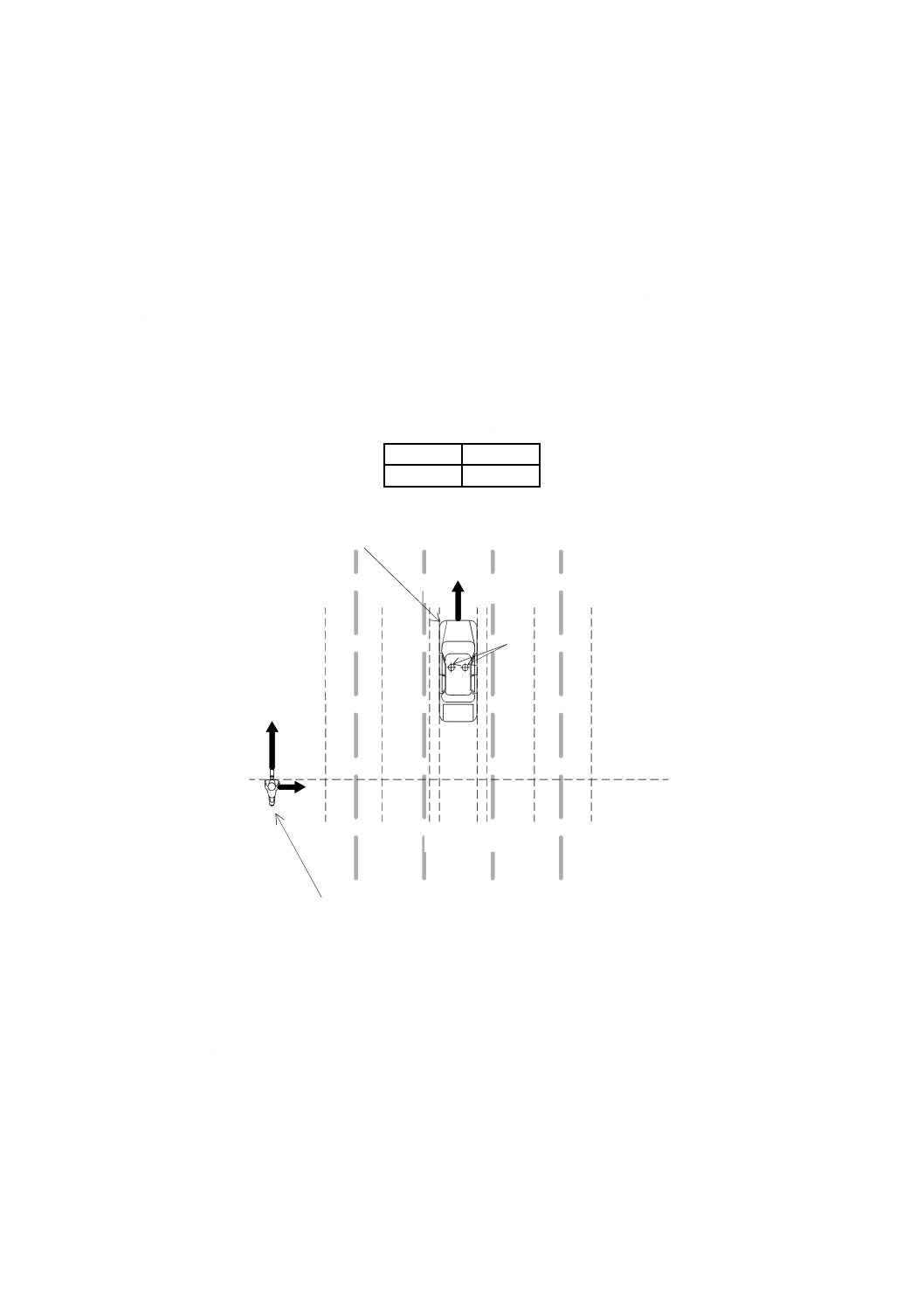
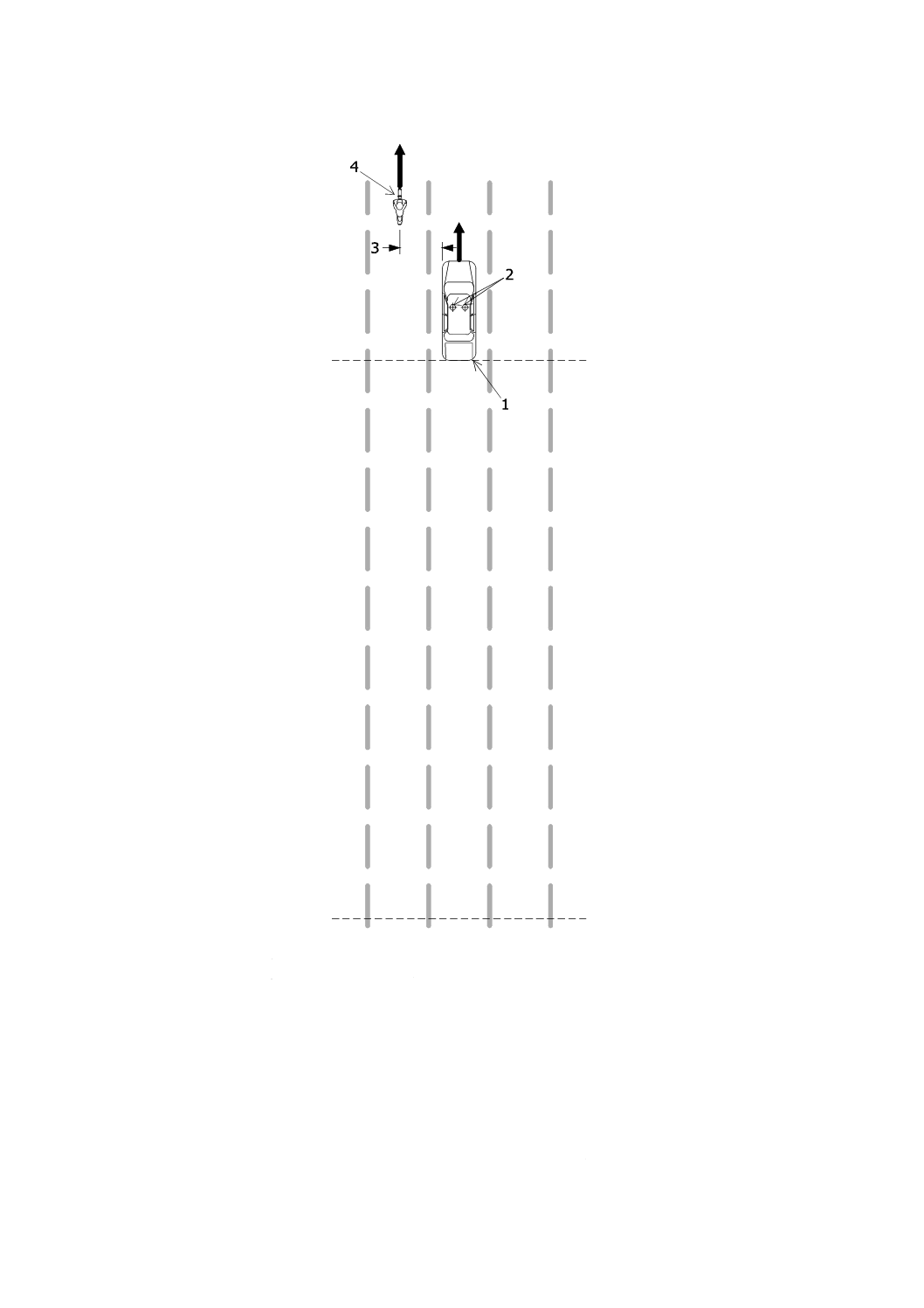
試験目標車両が当該車両を追い抜く場合
図11及び4.2に規定したラインを参照して,試験を次のように行う。
直線で平らな試験道路で,当該車両は最低20 m/sを維持して道路の直線部分を直進する。接近速度が1
m/sから3 m/sまでとなるよう,試験目標車両は図11に示すように道路の直線部分を直進する。また,当
該車両の車体(バックミラーを除く。)の側面と試験目標車両の中心線との横方向距離は2 mから3 mま
でとなるようにして,両車両を走行させる。試験を開始するに当たって,試験目標車両は完全にラインA
の後方にいる。
試験目標車両が当該車両に接近し追い抜くとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両が完全にラインAの後方にいる間,システムは警報を出してはならない。
− システムは試験目標車両がラインAを越えた後,試験目標車両が存在する側で警報を開始してもよい。
− 警報は,試験目標車両の前端がラインBを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
− 少なくとも試験目標車両の前端がラインCを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の後端がラインDを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
試験は,表5に従い,合計12回行うものとする。夜間試験の場合,当該車両及び試験目標車両のヘッド
ライト及びテールランプ以外に,照明はないものとする。ただし,周囲の照明状態がシステムの性能に影
響を及ぼさないことが明らかな場合,試験者は昼間試験又は夜間試験のいずれかの試験を選び,合計6回
にすることができる。
19
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5−試験目標車両が当該車両を追い抜く場合の死角警報試験回数
単位 回
試験対象
昼間
夜間
試験目標車両が当該車両の右側
3
3
試験目標車両が当該車両の左側
3
3
20
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B
B
C
C
D
D
A
A
1
当該車両
2
全視点範囲の95 %タイルの中心
3
横方向距離
4
試験目標車両
図11−試験目標車両が当該車両を追い抜く死角警報試験配置
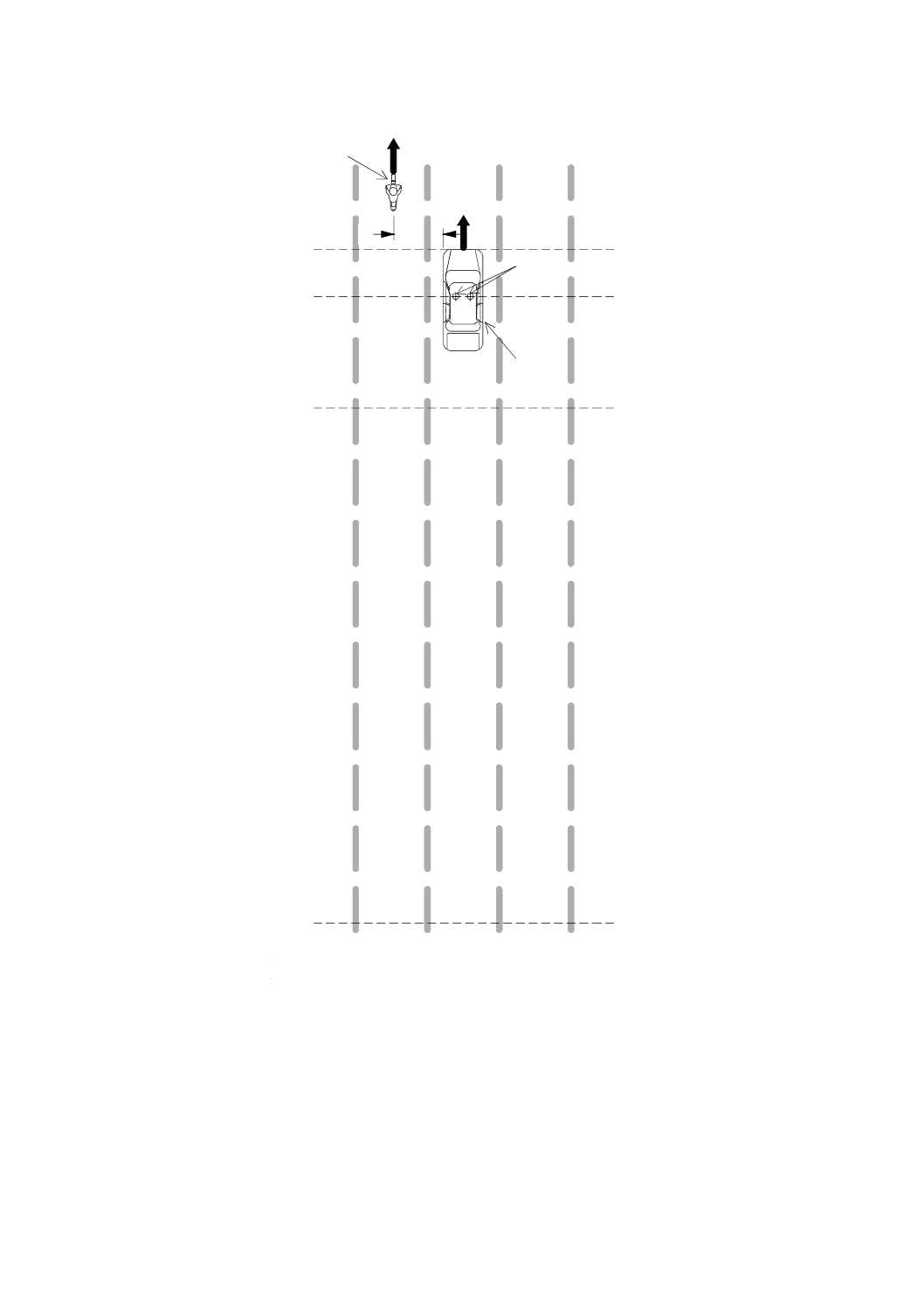
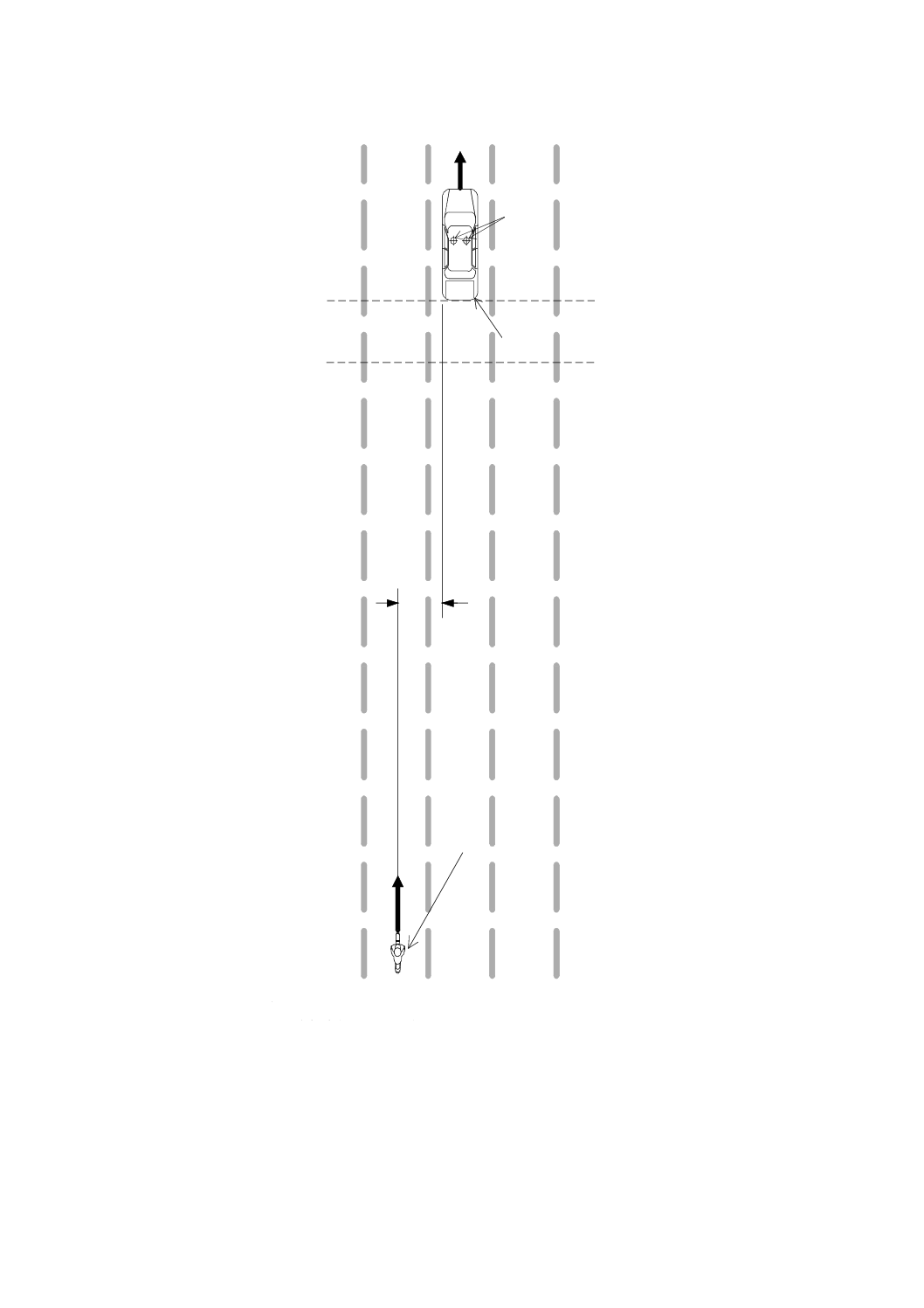
5.3.3.3
当該車両が試験目標車両を追い抜く場合
図12及び4.2に規定したラインを参照して,試験を次のように行う。
直線で平らな試験道路で,試験目標車両は最低20 m/sを維持して道路の直線部分を直進する。接近速度
21
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
が1 m/sから3 m/sまでとなるよう,当該車両は,図12に示すように道路の直線部分を直進する。また,
当該車両の車体(バックミラーを除く。)の側面と試験目標車両の中心線との横方向距離は,2 mから3 m
までとなるよう両車両を走行させる。試験を開始するに当たって,当該車両の前端が,試験目標車両の後
端より後方にある。
当該車両が試験目標車両に接近し,追い抜くとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両が完全にラインDの前方にいる間,システムは警報を出してはならない。
− システムは試験目標車両の後端がラインDを越えた後,試験目標車両が存在する側で警報を開始して
もよい。
− 警報は,試験目標車両の前端がラインCを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。ただし,死角警報抑制(4.2.3.2参照)に従って警報を抑制してもよい。
− 少なくとも試験目標車両の前端がラインBを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の前端がラインAを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
試験は表6に従い,合計12回行うものとする。夜間試験の場合,当該車両及び試験目標車両のヘッドラ
イト及びテールランプ以外に,照明はないものとする。ただし,周囲の照明状態がシステムの性能に影響
を及ぼさないことが明らかな場合,試験者は昼間試験又は夜間試験のいずれかの試験を選び,合計6回に
することができる。
表6−当該車両が試験目標車両を追い抜く場合の死角警報試験回数
単位 回
試験対象
昼間
夜間
試験目標車両が当該車両の右側
3
3
試験目標車両が当該車両の左側
3
3
22
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B
B
C
C
D
D
A
A
4
3
2
1
1
当該車両
2
全視点範囲の95 %タイルの中心
3
横方向距離
4
試験目標車両
図12−当該車両が試験目標車両を追い抜く死角警報試験配置
5.3.3.4
誤警報確認試験
5.3.3.2及び5.3.3.3に規定した試験手順で,各試験の,当該車両(バックミラーを除く。)の側面と試験
目標車両の中心線との横方向距離は,6.5 mから7.5 mまでを維持して繰り返す。この試験中,システムは
23
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
警報を出してはならない。
5.3.3.5
試験目標車両が車線変更する場合
図13及び4.2に規定したラインを参照して,試験を次のように行う。
直線で平らな試験道路で,当該車両は最低20 m/sを維持して道路の直線部分を直進する。試験目標車両
は,その前端がラインBと当該車両との間に位置するように走行させる。試験を開始するに当たって,試
験目標車両は完全にラインHの左側にあるものとする。試験目標車両は,完全にラインMの右側になる
まで,0.25 m/sから0.75 m/sまでの横方向速度で右に車線変更する。その後,試験目標車両は,完全にラ
インHの左側になるまで,0.25 m/sから0.75 m/sまでの横方向速度で左に車線変更する。
試験目標車両が左から右へ車線変更するとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両が完全にラインHの左にいる間,システムは警報を出してはならない。
− システムは試験目標車両の右端がラインHを越えた後,当該車両の左側で警報を開始してもよい。
− 警報は,試験目標車両の右端がラインGを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
− 少なくとも試験目標車両の右端がラインFを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の左端がラインEを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
− 試験目標車両が完全にラインEとラインJとの間にいる間,システムは警報を出してはならない。
− システムは試験目標車両の右端がラインJを越えた後,当該車両の右側で警報を開始してもよい。
− 警報は,試験目標車両の左端がラインKを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
− 少なくとも試験目標車両の左端がラインLを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の左端がラインMを越えてから,許容されるシステム応答時間(4.2.6参照)
以内に終了しなければならない。
試験目標車両が右から左へ車線変更するとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両が完全にラインMの右にいる間,システムは警報を出してはならない。
− システムは試験目標車両の左端がラインMを越えた後,当該車両の右側で警報を開始してもよい。
− 警報は,試験目標車両の左端がラインLを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
− 少なくとも試験目標車両の左端がラインKを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の右端がラインJを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
− 試験目標車両が完全にラインJとラインEとの間にいる間,システムは警報を出してはならない。
− システムは試験目標車両の左端がラインEを越えた後,当該車両の左側で警報を開始してもよい。
− 警報は,試験目標車両の右端がラインFを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
24
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 少なくとも試験目標車両の右端がラインGを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の右端がラインHを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
試験は,表7に従い合計6回行うものとする。夜間試験の場合,当該車両及び試験目標車両のヘッドラ
イト及びテールランプ以外に,照明はないものとする。ただし,周囲の照明状態がシステムの性能に影響
を及ぼさないことが明らかな場合,試験者は昼間試験又は夜間試験のいずれかの試験を選び,合計3回に
することができる。
表7−試験目標車両が車線変更する場合の死角警報試験回数
単位 回
昼間
夜間
3
3
B
B
H
H
M
M
L
K
J
L
K
J
E
F
G
E
F
G
2
1
3
1
当該車両
2
全視点範囲の95 %タイルの中心
3
試験目標車両
図13−試験目標車両が車線変更する場合の死角警報試験配置
5.4
接近車両警報機能の試験要件
5.4.1
一般
接近車両警報機能(LCDASタイプII:表1参照)に対する最小限の試験要件を,次に規定する。
5.4.2
接近車両警報試験測定要件
接近車両警報試験の測定は,次の要件を満たさなければならない。
25
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 接近車両警報試験装置は,試験対象の接近車両警報システムとは完全に独立している。
b) 試験目標車両が当該車両の後方にいる場合,当該車両の後端と試験目標車両の前端との縦方向距離の
測定が可能である。
c) 試験目標車両が当該車両に後方から接近している場合,試験目標車両の接近速度の測定が可能である。
d) 試験目標車両が当該車両の左側にいる場合,当該車両の最左端と試験目標車両の最右端との横方向距
離の測定が可能である。
e) 試験目標車両が当該車両の右側にいる場合,当該車両の最右端と試験目標車両の最左端との横方向距
離の測定が可能である。
f)
試験目標車両が警報条件を満たす時点から,警報を発する時点までの時間間隔の測定が可能である。
g) 警報が許可されない時点から,警報が終了した時点までの時間間隔が測定可能である。
なお,すべての試験手順に関して,測定装置は,次の精度を満たさなければならない。
h) 距離測定精度
− 2 m未満の距離については,精度は0.1 m以下とする。
− 2 mから10 mまでの距離については,精度は5 %以内とする。
− 10 mを超える距離については,精度は0.5 m以下とする。
i)
時間測定精度
− 200 ms未満の時間については,精度は20 ms以下とする。
− 200 msから1 sまでの時間については,精度は10 %以内とする。
− 1 sを超える時間については,精度は100 ms以下とする。
5.4.3
接近車両警報試験手順
5.4.3.1
一般
次の試験は,関連するすべての起動基準を満たさなければならない。
5.4.3.2
試験目標車両が当該車両を追い抜く場合
図14及び4.2に規定したラインを参照して,試験を次のように行う。
平らな試験道路で当該車両は,表8に示す範囲内の速度を維持して走行する。試験目標車両は,接近速
度が表8に示す範囲内で,図14に示すように走行する。また,当該車両の車体(外部ミラーを除く。)の
側面と試験目標車両の中心線との横方向距離は,2 mから3 mまでとなるようにして両車両を走行させる。
試験を開始するに当たって,試験目標車両は,当該車両の少なくとも150 m後方に位置する。
表8−試験目標車両が当該車両を追い抜く場合の両車両の速度
システムの
分類
曲線道路曲率半径
m
当該車両速度
m/s
試験目標車両接近速度
m/s
タイプA
125
7〜10
7〜10
タイプB
250
10〜13
12〜15
タイプC
500
13〜16
17〜20
試験目標車両が当該車両に接近し追い抜くとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両の衝突までの時間が7.5 s以上と推定される間,システムは警報を出してはならない。
− 試験目標車両の推定される衝突までの時間が表3に示す値に達した後,システムは0.3 s以内に試験目
標車両が存在する側で警報を開始しなければならない。
26
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 少なくとも試験目標車両の前端がラインBを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の後端がラインNを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
試験は,表9に従い合計12回行うものとする。曲線での試験について,道路の曲率半径は表2に示す値
(許容差
20
0
+ %)でなければならない。夜間試験の場合,当該車両及び試験目標車両のヘッドライト及び
テールランプ以外に,照明はないものとする。ただし,周囲の照明状態がシステムの性能に影響を及ぼさ
ないことが明らかな場合,試験者は昼間試験又は夜間試験のいずれかの試験を選び,合計6回にすること
ができる。
表9−試験目標車両が当該車両を追い抜く場合の接近車両警報試験回数
単位 回
試験対象
直線道路
左曲線道路
右曲線道路
昼間
夜間
昼間
夜間
昼間
夜間
試験目標車両が
当該車両の右側
2
−
−
2
−
2
試験目標車両が
当該車両の左側
−
2
2
−
2
−
27
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B
B
N
N
4
3
2
1
1
当該車両
2
全視点範囲の95 %タイルの中心
3
横方向距離
4
試験目標車両
図14−試験目標車両が当該車両を追い抜く場合の接近車両警報試験配置
28
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
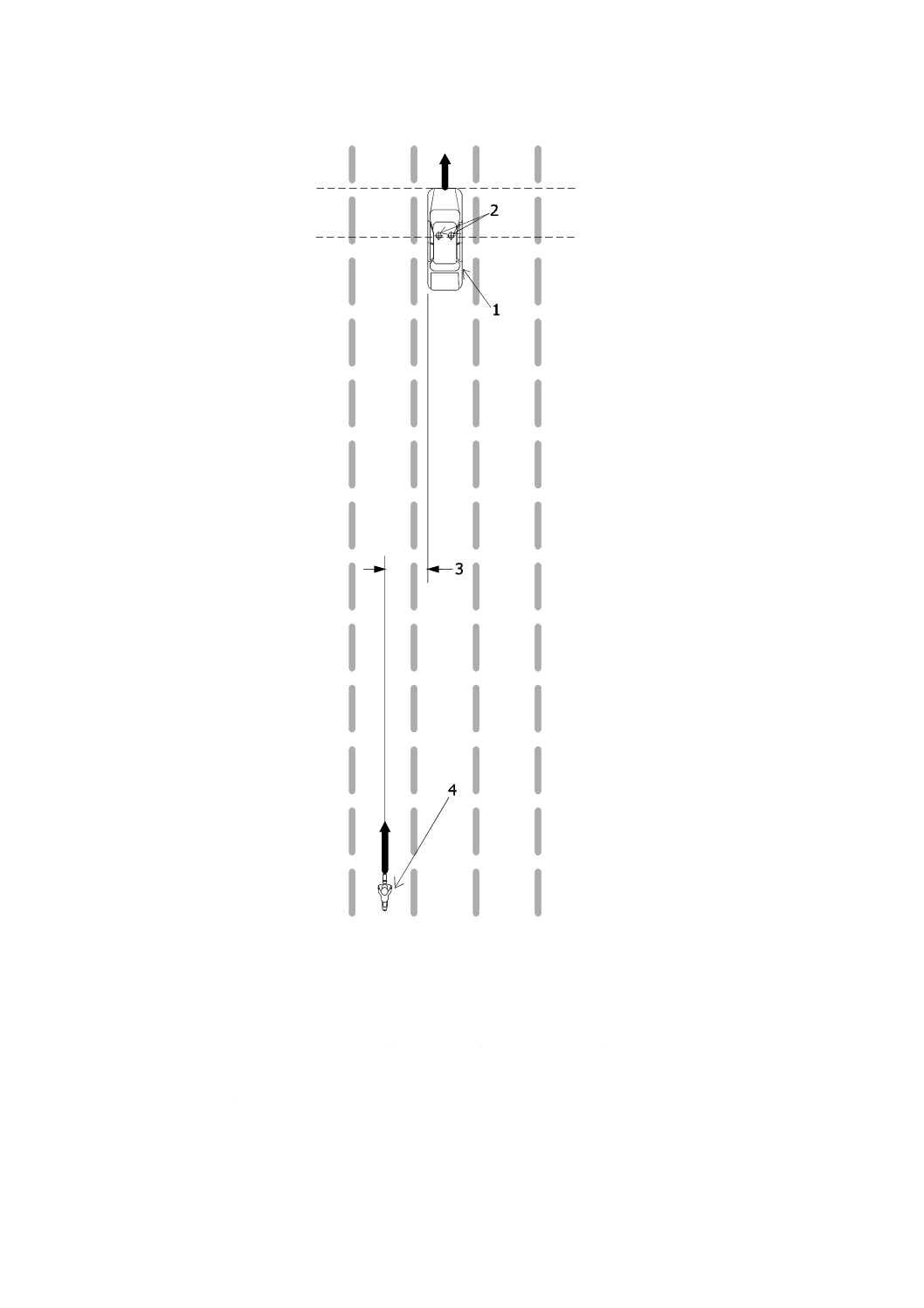
5.4.3.3
当該車両が試験目標車両を追い抜く場合
図15及び4.2に規定したラインを参照して,試験を次のように行う。
試験目標車両は,平らな試験道路で表10に示す範囲内の速度を維持して走行する。当該車両は,接近速
度が表10に示す範囲内で,図15に示すように走行する。また,当該車両の車体(外部ミラーを除く。)
の側面と試験目標車両の中心線との横方向距離は,2 mから3 mまでとなるようにして両車両を走行させ
る。試験を開始するに当たって,当該車両の前端が,試験目標車両の後端より後方にある。
表10−当該車両が試験目標車両を追い抜く場合の当該車両速度
試験目標車両
接近速度分類
道路曲率半径
m
試験目標車両の速度
m/s
当該車両の追抜き速度
m/s
タイプA
125
10〜15
1〜5
タイプB
250
15〜20
1〜5
タイプC
500
20〜25
1〜5
当該車両が試験目標車両に接近し追い抜くとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両が完全にラインNの前方にいる間,システムは警報を出してはならない。
− システムは,試験目標車両の後端がラインNを越えた後,試験目標車両が存在する側で警報を開始し
てもよい。
− 警報は,試験目標車両の前端がラインAを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
− 試験目標車両が完全にラインAの後方にいる間,システムは警報を出してはならない。
試験は,表11に従い合計12回行うものとする。曲線道路での試験における道路の曲率半径は,表2に
示す値(許容差
20
0
+ %)でなければならない。夜間試験の場合,当該車両及び試験目標車両のヘッドライ
ト及びテールランプ以外に,照明はないものとする。ただし,周囲の照明状態がシステムの性能に影響を
及ぼさないことが明らかな場合,試験者は昼間試験又は夜間試験のいずれかの試験を選び,合計6回にす
ることができる。
表11−当該車両が試験目標車両を追い抜く場合の接近車両警報試験回数
単位 回
試験対象
直線道路
左曲線道路
右曲線道路
昼間
夜間
昼間
夜間
昼間
夜間
試験目標車両が
当該車両の右側
−
2
2
−
2
−
試験目標車両が
当該車両の左側
2
−
−
2
−
2
29
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
N
N
A
A
1
当該車両
2
全視点範囲の95 %タイルの中心
3
横方向距離
4
試験目標車両
図15−当該車両が試験目標車両を追い抜く場合の接近車両警報試験配置
5.4.3.4
誤警報確認試験
5.4.3.2及び5.4.3.3に規定した試験手順で,各試験の,当該車両(バックミラーを除く。)の側面と試験
目標車両の中心線との横方向距離は,6.5 mから7.5 mまでを維持して繰り返す。この試験中,システムは
30
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
警報を出してはならない。
5.5
車線変更警報機能の試験要件
5.5.1
一般
車線変更警報機能(LCDASタイプIII:表1参照)に対する最小限の試験要件を,次に規定する。
5.5.2
車線変更警報試験測定方法
車線変更警報試験の測定は,次の要件を満たさなければならない。
a) 車線変更警報試験装置は,試験対象の車線変更警報システムとは完全に独立している。
b) 試験目標車両が当該車両の後方にいる場合,当該車両の後端と試験目標車両の前端との縦方向距離の
測定が可能である。
c) 試験目標車両が当該車両に後方から接近している場合,試験目標車両の接近速度が測定可能である。
d) 試験目標車両が当該車両の前方にいる場合,当該車両の前端と試験目標車両の後端との縦方向距離の
測定が可能である。
e) 試験目標車両が当該車両の左側にいる場合,当該車両の最左端と試験目標車両の最右端との横方向距
離の測定が可能である。
f)
試験目標車両が当該車両の右側にいる場合,当該車両の最右端と試験目標車両の最左端との横方向距
離の測定が可能である。
g) 試験目標車両が警報条件を満たす時点から,警報を発する時点までの時間間隔の測定が可能である。
h) 警報が許可されない時点から,警報が終了した時点までの時間間隔が測定可能である。
なお,すべての試験手順に関して,測定装置は次の精度を満たさなければならない。
i)
距離測定精度
− 2 m未満の距離については,精度は0.1 m以下とする。
− 2 mから10 mまでの距離については,精度は5 %以内とする。
− 10 mを超える距離については,精度は0.5 m以下とする。
j)
時間測定精度
− 200 ms未満の時間については,精度は20 ms以下とする。
− 200 msから1 sまでの時間については,精度は10 %以内とする。
− 1 sを超える時間については,精度は100 ms以下とする。
5.5.3
車線変更警報試験手順
5.5.3.1
一般
次の試験は,関連するすべての起動基準を満たさなければならない。
5.5.3.2
試験目標車両が当該車両を追い抜く場合
この試験の目的は,試験目標車両が当該車両を追い抜くとき,車線変更警報機能が必要な警報を出せる
か確認すること,及び接近車両警報機能と死角警報機能との間でスムーズな移行が行われるか確認するこ
とである。
図16及び4.2に規定したラインを参照し,平らな試験道路で当該車両は,表12に示す範囲内の速度を
維持して走行する。試験目標車両は,接近速度が表12に示す範囲内で図16に示すように走行し当該車両
を追い抜く。また,当該車両の車体(バックミラーを除く。)の側面と試験目標車両の中心線との横方向距
離は2 mから3 mまでとなるようにして,両車両を走行させる。試験を開始するに当たって,試験目標車
両は,当該車両の少なくとも150 m後方に位置する。
31
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表12−試験目標車両が当該車両を追い抜く場合の当該車両速度
システムの
分類
道路曲率半径
m
当該車両の速度
m/s
目標車両の接近速度
m/s
タイプA
125
7〜10
7〜10
タイプB
250
10〜13
12〜15
タイプC
500
13〜16
17〜20
試験目標車両が当該車両に接近し追い抜くとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両の衝突までの時間が7.5 s以上と推定される間,システムは警報を出してはならない。
− 試験目標車両の推定衝突時間が表3に示す値に達した後,システムは0.3 s以内に試験目標車両が存在
する側で警報を開始しなければならない。
− 少なくとも試験目標車両の前端がラインCを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の後端がラインDを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
試験は表13に従い,合計12回行うものとする。曲線道路での試験について,道路の曲率半径は,表2
に示す値(許容差
20
0
+ %)でなければならない。夜間試験の場合,当該車両及び試験目標車両のヘッドラ
イト及びテールランプ以外に,照明はないものとする。ただし,周囲の照明状態がシステムの性能に影響
を及ぼさないことが明らかな場合,試験者は昼間試験又は夜間試験のいずれかの試験を選び,合計6回に
することができる。
表13−試験目標車両が当該車両を追い抜く場合の車線変更警報試験回数
単位 回
試験対象
直線道路
左曲線道路
右曲線道路
昼間
夜間
昼間
夜間
昼間
夜間
試験目標車両が
当該車両の右側
2
−
−
2
−
2
試験目標車両が
当該車両の左側
−
2
2
−
2
−
32
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
C
C
D
D
1
当該車両
2
全視点範囲の95 %タイルの中心
3
横方向距離
4
試験目標車両
図16−試験目標車両が当該車両を追い抜く車線変更警報試験配置
5.5.3.3
当該車両が試験目標車両を追い抜く場合
この試験は,5.3.3.3に従って実施されなければならない。
この試験の目的は,当該車両が試験目標車両を追い抜くとき,車線変更警報システムが必要な警報を出
33
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
すか確認することである。
5.5.3.4
誤警報確認試験
この試験の目的は,試験目標車両が隣接車線を越えた車線に位置するとき,車線変更警報システムが警
報を出さないことを確認することである。5.5.3.2及び5.5.3.3の試験手順で,各試験の当該車両(バックミ
ラーを除く。)の側面と試験目標車両の中心線との横方向距離は,6.5 mから7.5 mまでを維持して繰り返
す。
システムは,この試験中に警報を出してはならない。
5.5.3.5
試験目標車両が車線変更する場合
図17及び4.2に規定したラインを参照して,試験を次のように行う。
直線で平らな試験道路で,当該車両は最低20 m/sを維持して道路の直線部分を直進する。試験目標車両
は,その前端がラインBと当該車両との間に位置するように走行させる。試験を開始するに当たって,試
験目標車両は,完全にラインHの左側にあるものとする。試験目標車両は,完全にラインMの右側にな
るまで,0.25 m/sから0.75 m/sまでの横方向速度で右に車線変更する。その後,試験目標車両は,完全に
ラインHの左側になるまで,0.25 m/sから0.75 m/sまでの横方向速度で左に車線変更する。
試験目標車両が左から右へ車線変更するとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両が完全にラインHの左にいる間,システムは警報を出してはならない。
− システムは試験目標車両の右端がラインHを越えた後,当該車両の左側で警報を開始してもよい。
− 警報は,試験目標車両の右端がラインGを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
− 少なくとも試験目標車両の右端がラインFを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の左端がラインEを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
− 試験目標車両が完全にラインEとラインJとの間にいる間,システムは警報を出してはならない。
− システムは試験目標車両の右端がラインJを越えた後,当該車両の右側で警報を開始してもよい。
− 警報は,試験目標車両の左端がラインKを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
− 少なくとも試験目標車両の左端がラインLを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の左端がラインMを越えてから,許容されるシステム応答時間(4.2.6参照)
以内に終了しなければならない。
試験目標車両が右から左へ車線変更するとき,システムは次の試験要件を満たさなければならない。
− 試験目標車両が完全にラインMの右にいる間,システムは警報を出してはならない。
− システムは試験目標車両の左端がラインMを越えた後,当該車両の右側で警報を開始してもよい。
− 警報は,試験目標車両の左端がラインLを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
− 少なくとも試験目標車両の左端がラインKを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の右端がラインJを越えてから,許容されるシステム応答時間(4.2.6参照)以
34
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
内に終了しなければならない。
− 試験目標車両が完全にラインJとラインEとの間にいる間,システムは警報を出してはならない。
− システムは試験目標車両の左端がラインEを越えた後,当該車両の左側で警報を開始してもよい。
− 警報は,試験目標車両の右端がラインFを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に開始しなければならない。
− 少なくとも試験目標車両の右端がラインGを越えるまで,システムは警報を出し続けなければならな
い。
− 警報は,試験目標車両の右端がラインHを越えてから,許容されるシステム応答時間(4.2.6参照)以
内に終了しなければならない。
試験は,表14に従い合計6回行うものとする。夜間試験の場合,当該車両及び試験目標車両のヘッドラ
イト及びテールランプ以外に,照明はないものとする。ただし,周囲の照明状態がシステムの性能に影響
を及ぼさないことが明らかな場合,試験者は昼間試験又は夜間試験のいずれかの試験を選び,合計3回に
することができる。
表14−試験目標車両が車線変更する場合の試験回数
単位 回
昼間
夜間
3
3
B
B
H
H
M
M
L
K
J
L
K
J
E
F
G
E
F
G
2
1
3
1
当該車両
2
全視点範囲の95 %タイルの中心
3
試験目標車両
図17−試験目標車両の横方向移動時の車線変更警報試験配置
35
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
死角警報事例
序文
この附属書は,死角警報の事例を記載するものであって,規定の一部ではない。
次の事例は,死角警報要件を明確にすることを意図している。すべての事例は,当該車両の左側に目標
車両が位置する。右側警報要件は,左側警報要件と対称である。
注記 事例図中の塗りつぶし部分は,隣接領域を示す。
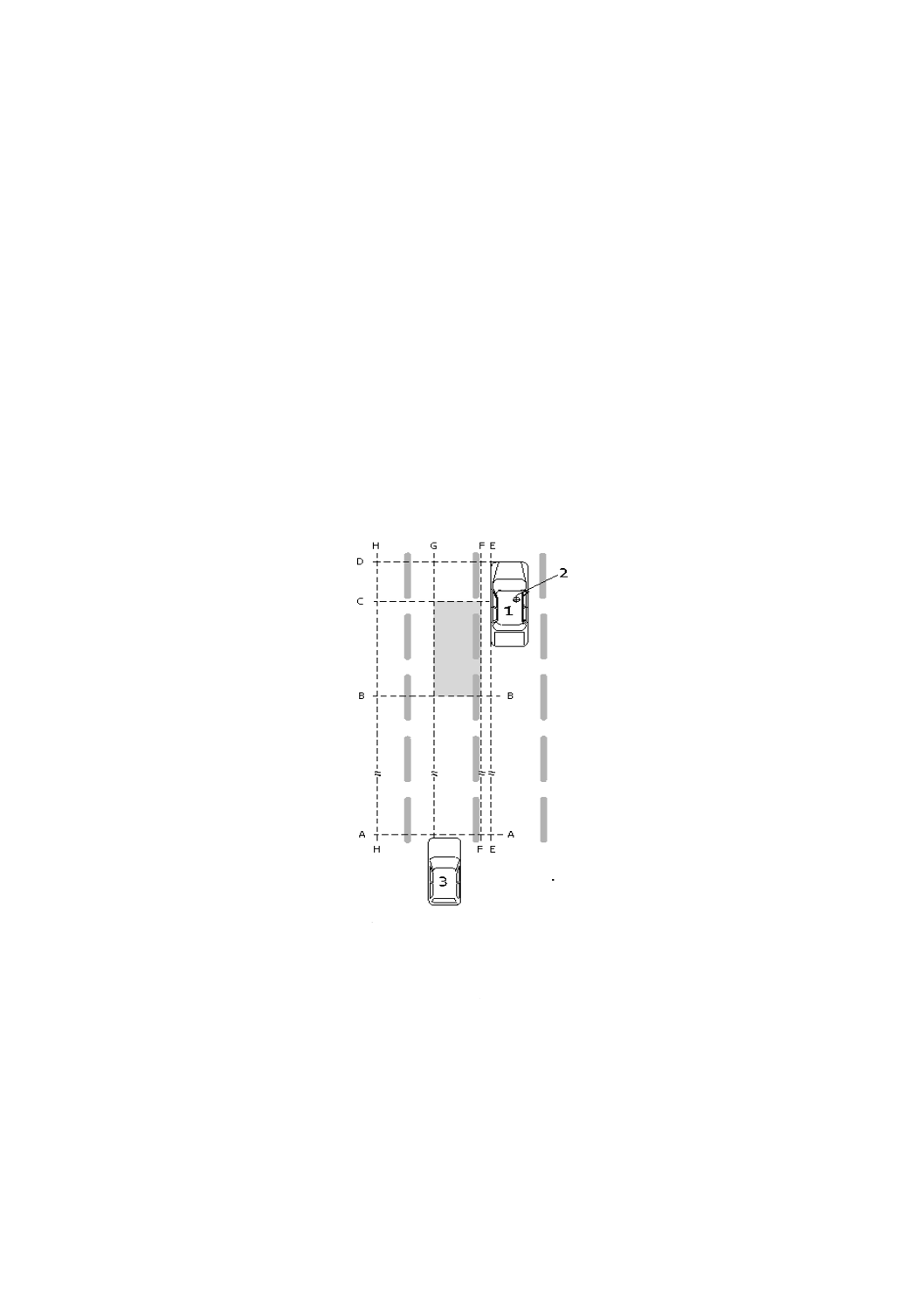
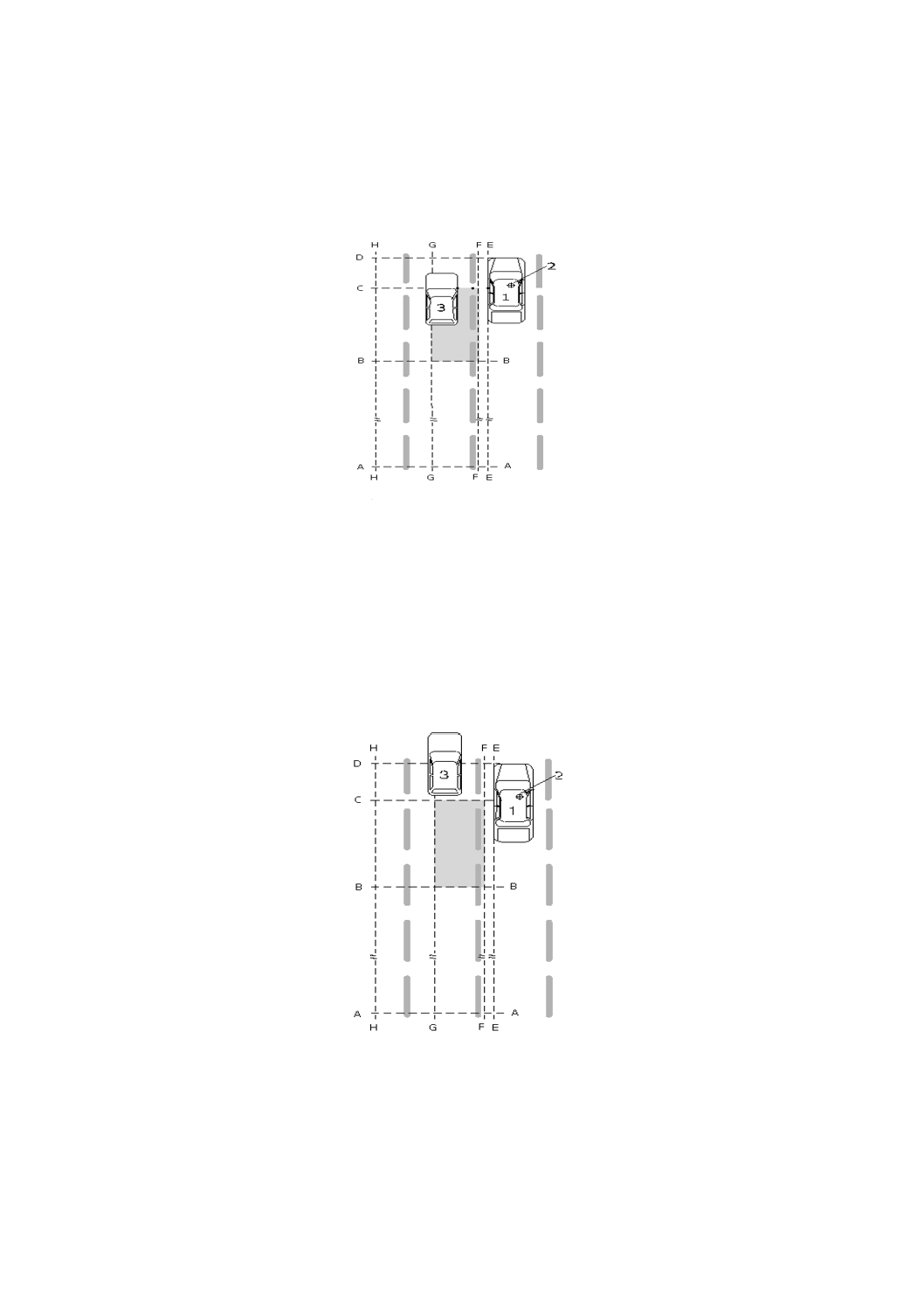
A.1 死角警報事例1
図A.1に示す関係位置の場合,死角警報システムは警報してはならない。目標車両は,ラインA,D,E
及びHに規定される領域外に完全に位置している。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.1−死角警報事例1
36
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
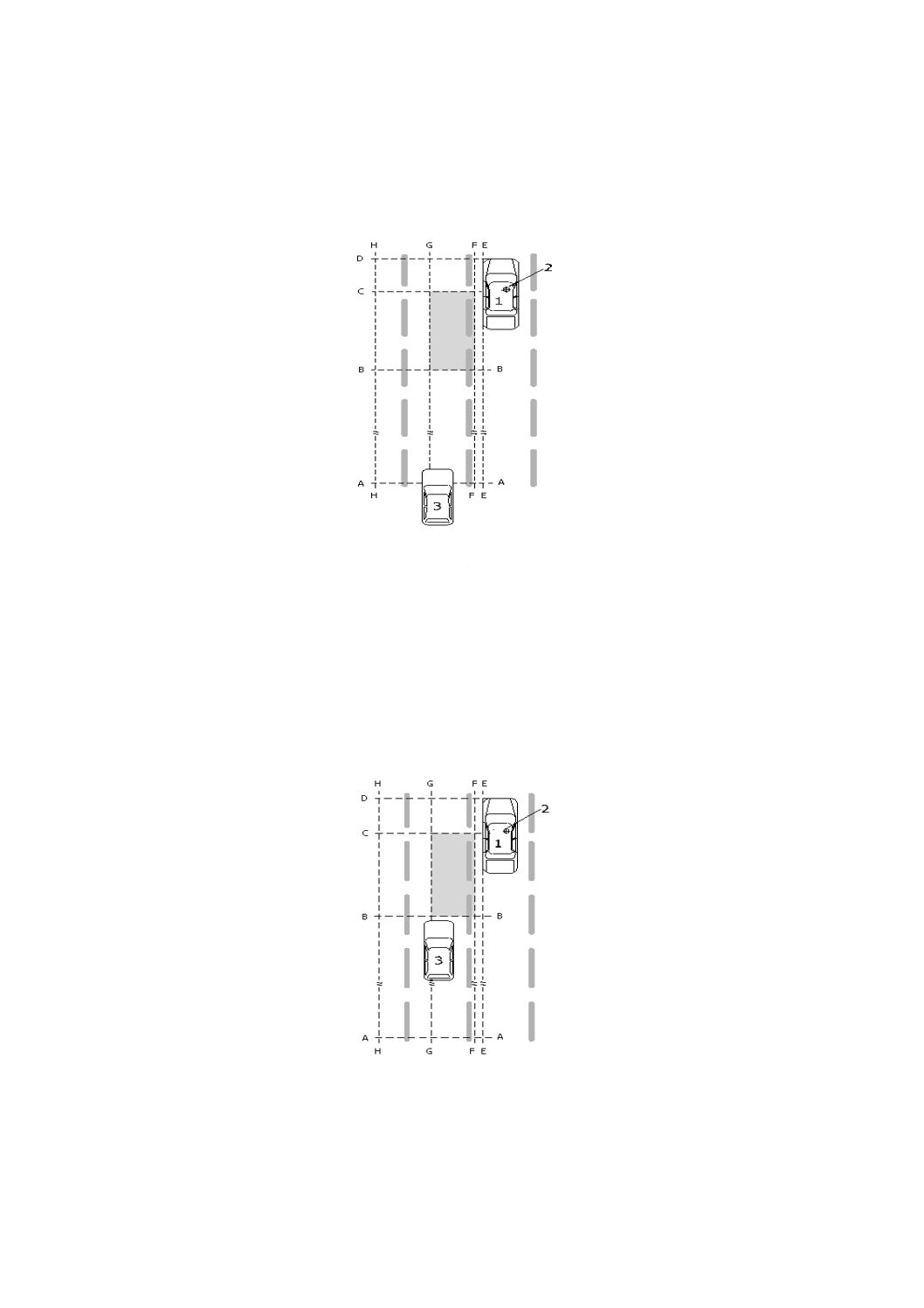
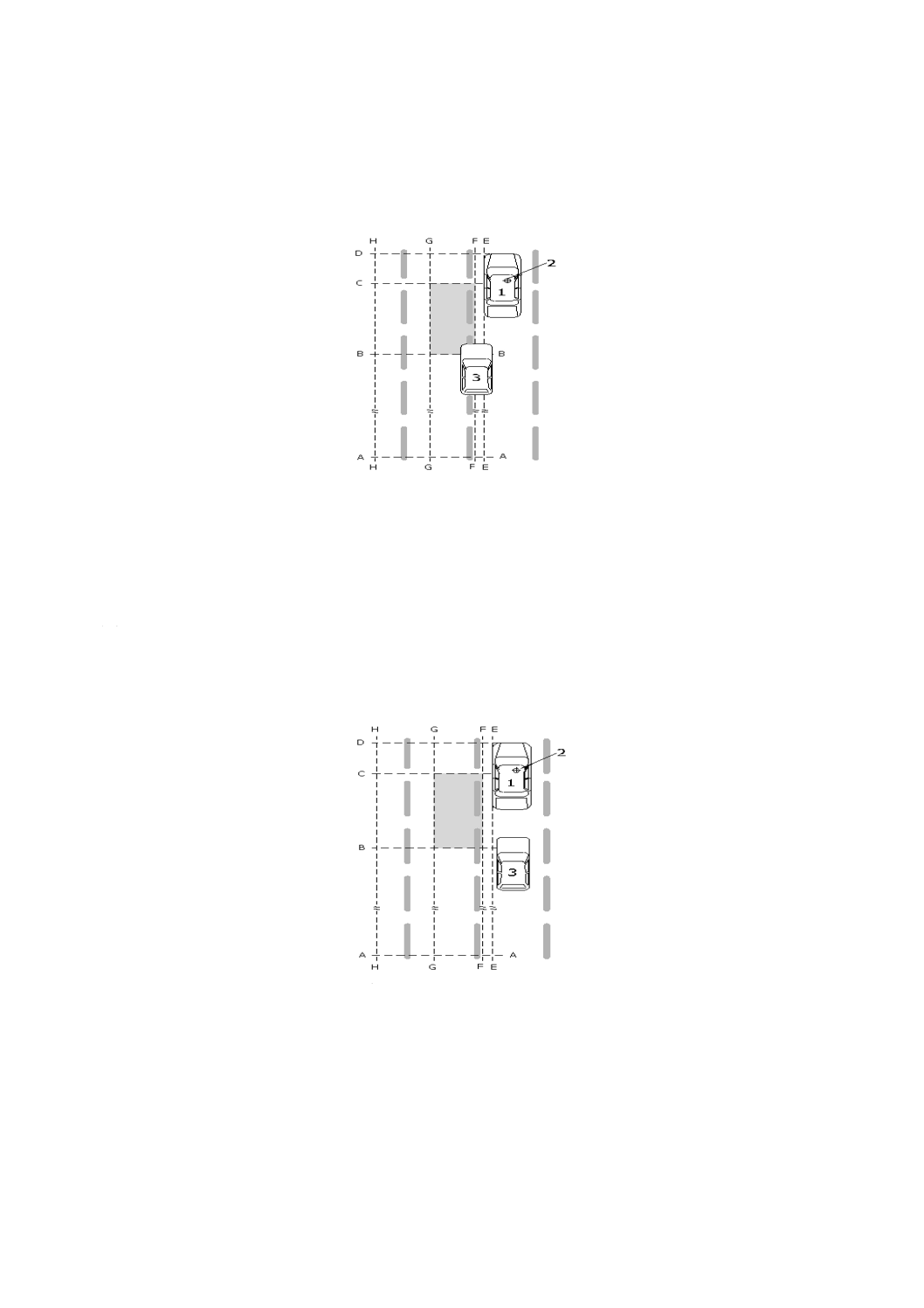
A.2 死角警報事例2
図A.2に示す関係位置の場合,死角警報システムは警報してもよい。目標車両は,ラインA,D,E及
びHに規定される領域外に完全に位置しているわけではないので,警報してもよい。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.2−死角警報事例2
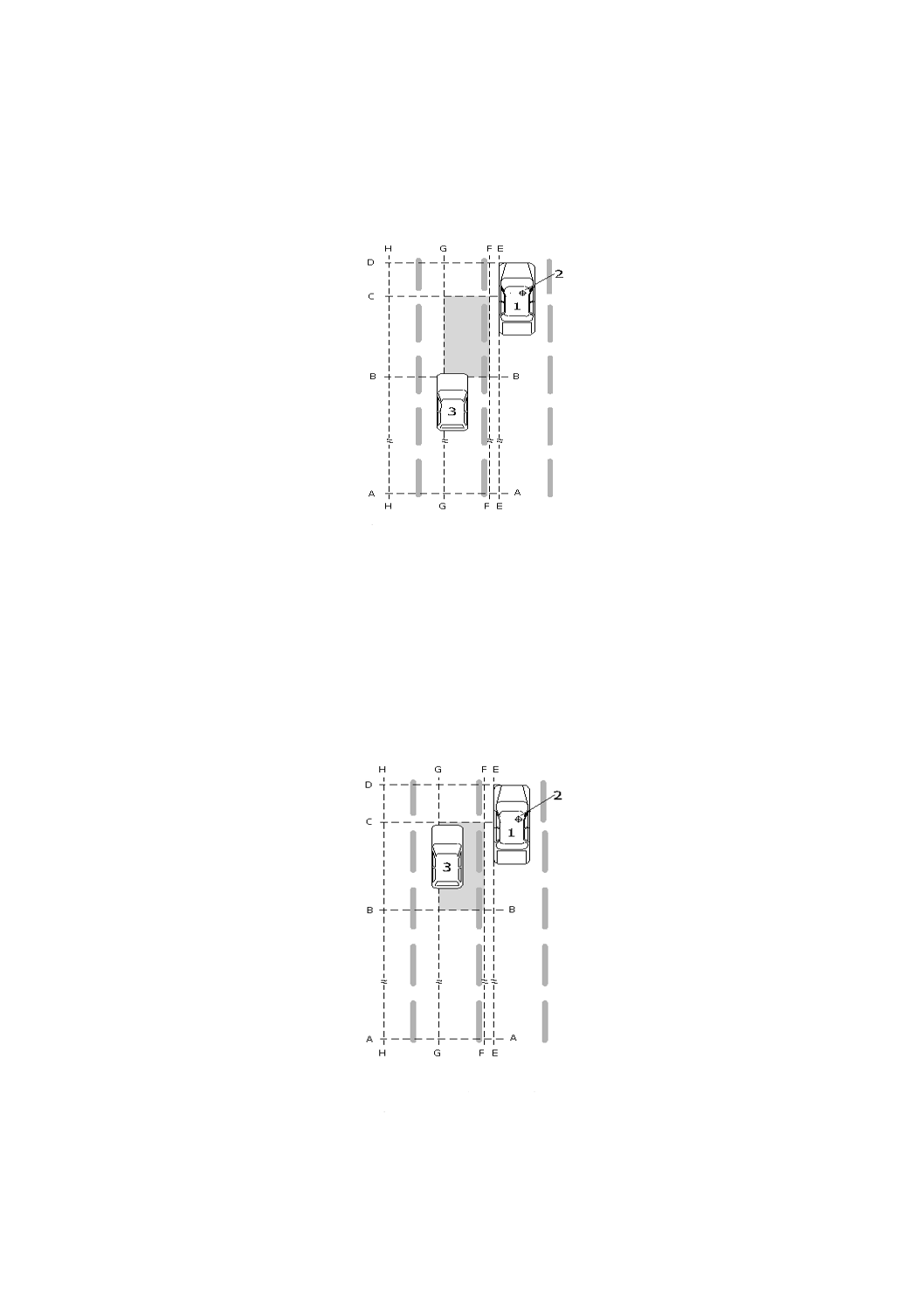
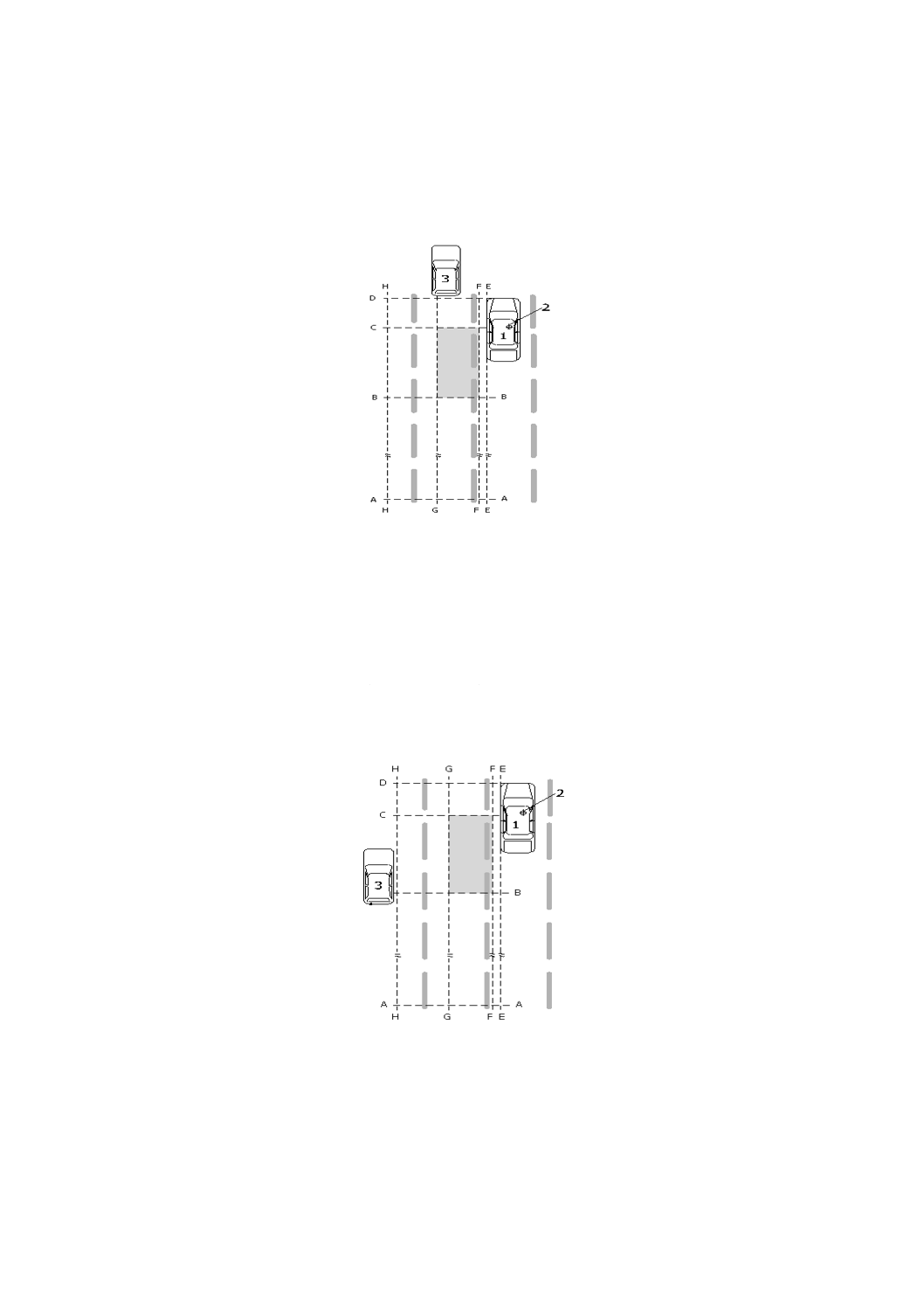
A.3 死角警報事例3
図A.3に示す関係位置の場合,死角警報システムは警報してもよい。目標車両のいかなる部分もライン
Bの前方にないため,警報は必ずしも必要とされない。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.3−死角警報事例3
37
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4 死角警報事例4
図A.4に示す関係位置の場合,死角警報システムは警報しなければならない。目標車両の最前部がライ
ンBの前方にある。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.4−死角警報事例4
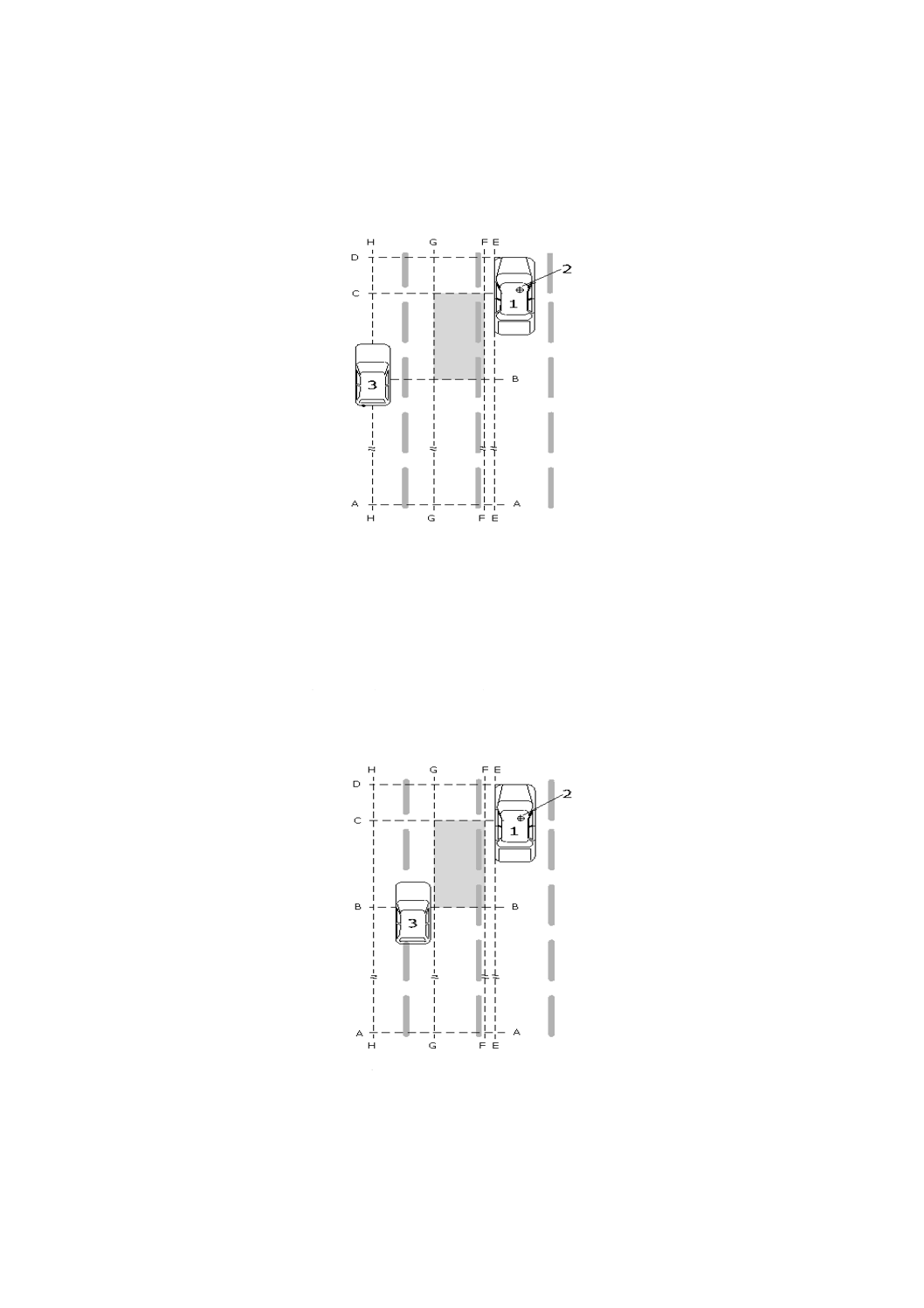
A.5 死角警報事例5
図A.5に示す関係位置の場合,死角警報システムは警報しなければならない。目標車両が完全にライン
Cの後方にある。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.5−死角警報事例5
38
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.6 死角警報事例6
図A.6に示す関係位置の場合,死角警報システムは警報してもよい。目標車両が完全にラインCの後方
にないため,警報は必ずしも必要とされない。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.6−死角警報事例6
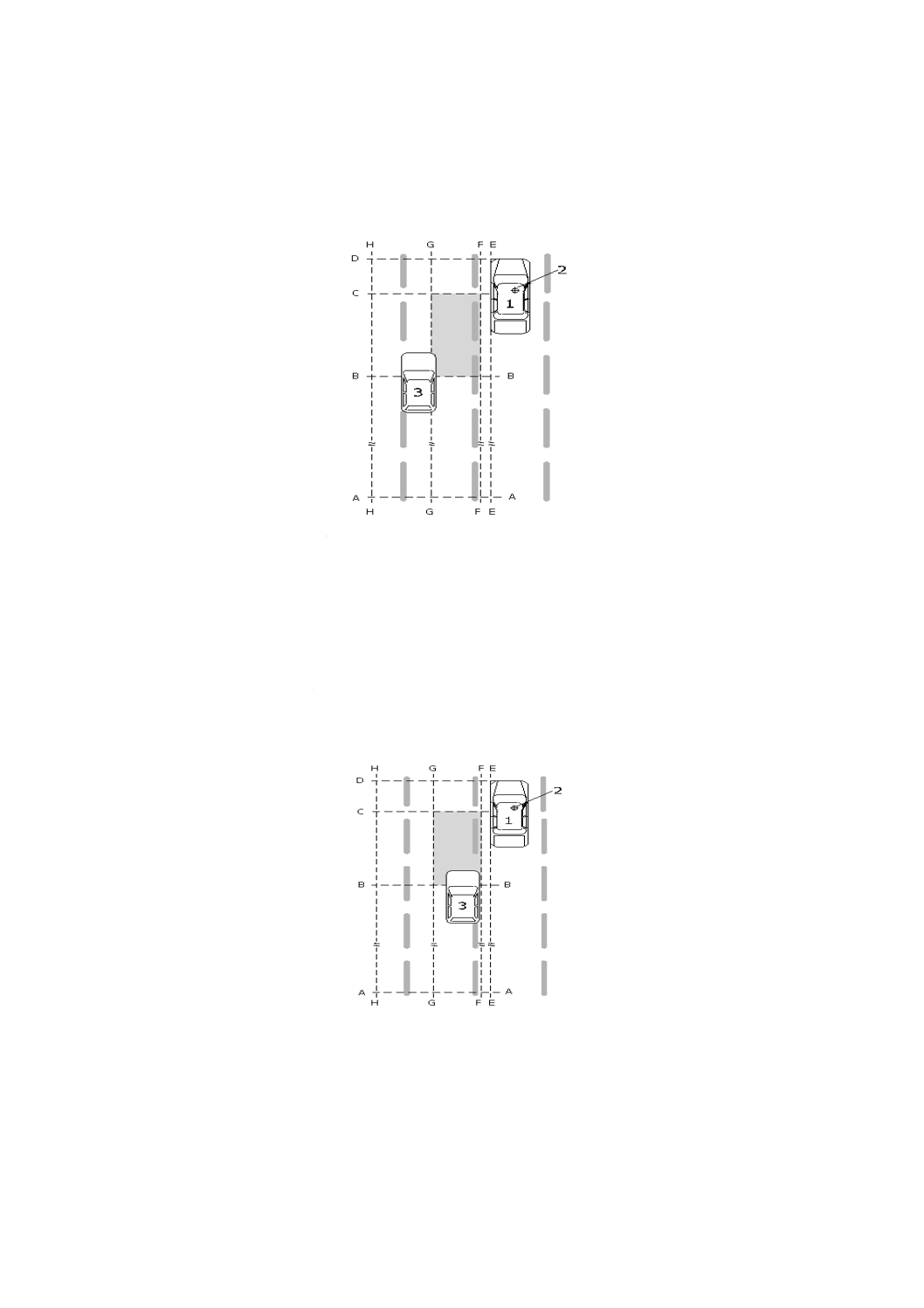
A.7 死角警報事例7
図A.7に示す関係位置の場合,死角警報システムは警報してもよい。前方に位置する車両は,ラインA,
D,E及びHに規定される領域外に完全に位置しているわけではないので,警報してもよい。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
前方に位置する車両
図A.7−死角警報事例7
39
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.8 死角警報事例8
図A.8に示す関係位置の場合,死角警報システムは警報してはならない。前方に位置する車両は,ライ
ンA,D,E及びHに規定される領域外に完全に位置している。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
前方に位置する車両
図A.8−死角警報事例8
A.9 死角警報事例9
図A.9に示す関係位置の場合,死角警報システムは警報してはならない。目標車両は,ラインA,D,E
及びHに規定される領域外に完全に位置している。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.9−死角警報事例9
40
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.10 死角警報事例10
図A.10に示す関係位置の場合,死角警報システムは警報してもよい。目標車両は,ラインA,D,E及
びHに規定される領域外に完全に位置しているわけではないので,警報してもよい。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.10−死角警報事例10
A.11 死角警報事例11
図A.11に示す関係位置の場合,死角警報システムは警報してもよい。目標車両のいかなる部分もライン
Gの右側にないため,警報は必ずしも必要とされない。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.11−死角警報事例11
41
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.12 死角警報事例12
図A.12に示す関係位置の場合,死角警報システムは警報しなければならない。目標車両の右側がライン
Gの右側にある。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.12−死角警報事例12
A.13 死角警報事例13
図A.13に示す関係位置の場合,死角警報システムは警報しなければならない。目標車両が完全にライン
Fの左側にある。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.13−死角警報事例13
42
D 0805:2010 (ISO 17387:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.14 死角警報事例14
図A.14に示す関係位置の場合,死角警報システムは警報してもよい。目標車両が完全にラインFの左
側にあるわけではないため,警報は必ずしも必要とされない。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.14−死角警報事例14
A.15 死角警報事例15
図A.15に示す関係位置の場合,死角警報システムは警報してはならない。目標車両は,ラインA,D,
E及びHに規定される領域外に完全に位置している。
1
当該車両
2
全視点範囲の95 %タイルの中心
3
目標車両
図A.15−死角警報事例15