D 0802:2015 (ISO 15623:2013)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 2
2 引用規格························································································································· 2
3 用語及び定義··················································································································· 2
4 記号及び略語··················································································································· 5
5 仕様及び要求事項············································································································· 6
5.1 システム機能要件 ·········································································································· 6
5.2 必須機能 ······················································································································ 6
5.3 動作モデル ··················································································································· 6
5.4 警報機能要件 ················································································································ 7
5.5 警報要素要件 ················································································································ 8
5.6 システムの分類 ············································································································· 9
5.7 障害車両検知範囲及び検知性能 ······················································································· 10
5.8 カーブでのFVCWS性能 ································································································ 11
5.9 使用者安全要求事項 ······································································································ 11
5.10 ヒューマンインタフェースに関する要求事項 ···································································· 12
5.11 システム限界の周知 ····································································································· 12
6 検知性能を測定する評価試験方法 ······················································································· 12
6.1 試験目標物の仕様 ········································································································· 12
6.2 周辺環境の条件 ············································································································ 13
6.3 検知範囲の試験方法 ······································································································ 13
6.4 警報距離範囲及び精度の試験方法 ···················································································· 13
6.5 目標物識別能力の試験方法 ····························································································· 14
附属書A(参考)衝突警報の基礎的考察 ·················································································· 17
附属書B(参考)曲線路上の障害車両検知 ··············································································· 21
附属書C(参考)レーザレーダ試験目標物の反射係数 ································································ 23
附属書D(参考)電波レーダ試験目標物の形状 ········································································· 26
D 0802:2015 (ISO 15623:2013)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,公益社団法人自動
車技術会(JSAE)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改
正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格であ
る。
これによって,JIS D 0802:2002は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 0802:2015
(ISO 15623:2013)
高度道路交通システムー
前方車両衝突警報システム−
性能要求事項及び試験方法
Intelligent transport systems-Forward vehicle collision warning systems-
Performance requirements and test procedures
序文
この規格は,2013年に第2版として発行されたISO 15623を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
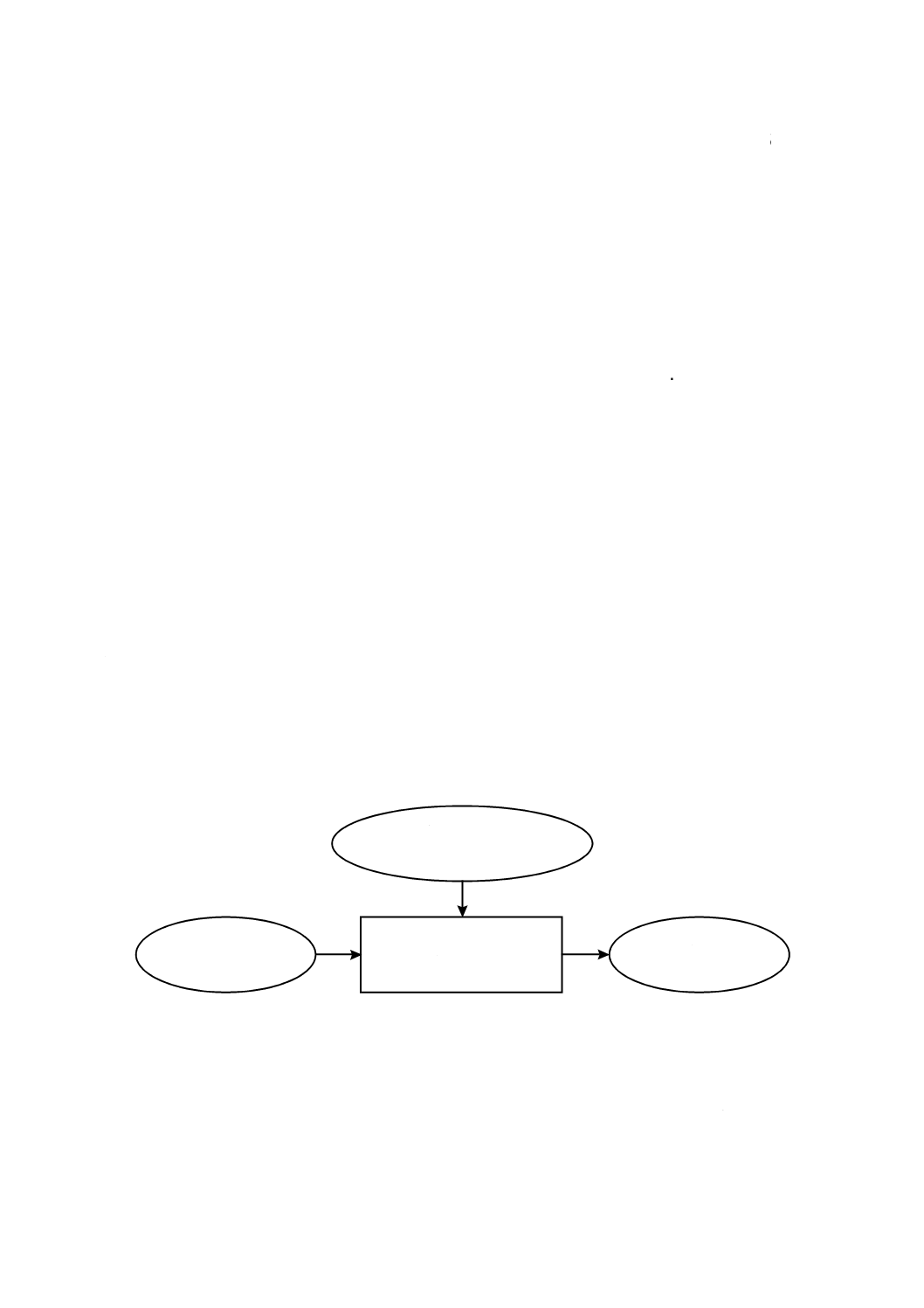
前方車両衝突警報システム(以下,FVCWSという。)の主な機能は,当該車両の走行進路上に存在する
前方車両に対して,当該車両が潜在的危険状態になる状況に遭遇したときに,運転者に警報することであ
る。このFVCWSは,次の情報を使用して機能する。
a) 前方車両までの距離。
b) 衝突に至るまでの予想時間。
c) 前方車両が当該車両の進路上にあるかどうか。
取得した情報を基に,制御システムが図1の“目標車両選択及び警報必要性判断”に従って判定し,運
転者に警報を発する。
図1−FVCWSの機能要素
世界の自動車製造業者及び自動車部品供給業者は,これらFVCWSの開発及び商品化を追い求めている。
幾つかの国ではこの種のシステムは既に市場に導入されている。1994年,関係諸国間でこのような規格化
の努力が開始された。この規格は,FVCWSの基本的な要求事項及び試験方法だけを取り扱う構成として
いる。この規格は,更に機能を発展させたシステム及びこの規格を拡張したシステム規格の基礎として使
用することもできる。
当該車両の動作,
運転者の行動
前方車両の動作
警報
目標車両選択
及び警報必要性判断
2
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
適用範囲
この規格は,当該車両の前方にある他の車両との追突の可能性を運転者に警告するシステムの,性能要
件及び試験方法について規定する。FVCWSは,規定の当該車両速度範囲,道路曲率範囲及び目標車両タ
イプにて作動する。この規格は,125 mを超えるカーブ半径の道路に適用され,乗用車,トラック,バス
及びモーターサイクルを含む自動車を対象とする。
なお,システム性能には限界があり,車両の安全操作についての最終責任は運転者にある。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 15623:2013,Intelligent transport systems−Forward vehicle collision warning systems−
Performance requirements and test procedures(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,その最新版(追補を含む。)を適用する。
JIS C 6802 レーザ製品の安全基準
注記 対応国際規格:IEC 60825-1,Safety of laser products−Part 1: Equipment classification and
requirements(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
衝突警報(collision warning)
前方車両との追突の可能性のある場合に,回避又は被害を低減するための緊急行動の必要性を示す警報。
注記 この警報は,衝突を回避するために,緊急ブレーキ,車線変更又はその他の緊急操作の必要性
を運転者に警告するべき段階で発せられる。
3.2
目標物の反射係数,RCTT(reflection coefficient of test target)
目標物の光レーダ反射率で,受信機に対する放射強度(Iref-W/sr)として定義され,受信強度を送信強
度(Et-W/m2)で除したもの。
注記 RCTT値の単位は平方メートル毎ステラジアン(m2/sr)である(附属書Cを参照)。
3.3
前方車両,FV(forward vehicle)
当該車両の前方にあって,当該車両と同じ方向に動いており,かつ,同じ進路上を走行している車両。
3.4
前方車両衝突警報システム,FVCWS(forward vehicle collision warning system)
当該車両の前方進路(交差点を除く。)にある他の車両との衝突の危険性を,運転者に警報するシステム。
3.5
障害車両(obstacle vehicles)
FVCWSで検知でき,潜在的危険が想定される停止及び移動しているFV。
3
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例 自動車(車,トラック,バス及びモーターサイクル)だけ。
3.6
予備衝突警報(preliminary collision warning)
追突に至る可能性のある危険な状況の初期段階で,システムが運転者に与える情報。
注記 システムは衝突警報に先立ってこの警報を提供してもよい。
3.7
レーダ有効反射断面積,RCS(radar cross section)
平方メートル単位で測定されたレーダ目標物の反射強度指標。電波の単位面積当たりの電力に対する,
単位立体角当たりの電力の比率の4π倍として定義される。
3.8
視程(visibility)
水平方向の空を背景とした黒ずんだ目標(大きさが視角0.5°〜5°のもの。)を肉眼で識別できる最大距
離。これは平行ビームに集光された色温度2 700 Kのランプからの光束が大気中を通過し,その95 %を減
衰する光路の長さである気象光学視距離とほぼ一致する。
3.9
アダプティブ・クルーズコントロールシステム,ACC(adaptive cruise control)
エンジン及び/又はパワートレイン,また,任意でブレーキを制御することによって当該車両が適切な
車間距離で前方車両に追従走行できるようにする従来のクルーズコントロールシステムの発展形。
注記 JIS D 0801参照。
3.10
隣接車線(adjacent lane)
当該車両が走行している車線と1本の車線境界を共有して,当該車両と同じ走行方向をもつ走行車線。
3.11
車間距離,xc(t)(clearance)
目標車両の後尾面から当該車両の先頭面までの距離。
3.12
割り込み車両(cut-in vehicle)
当該車両の進路に向かって横方向の運動成分をもつ前方の隣接車両。
3.13
加速度変化率(jerk)
物体の加速度の変化率。
3.14
最小速度,Vmin(minimum velocity)
FVCWSが機能しなければならない,当該車両の最小速度。
3.15
追突(rear-end collision)
当該車両のフロントがFVのリアエンドに衝突するFVへの衝突。
4
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.16
相対速度,vr(t)(relative velocity)
当該車両と目標車両との縦方向速度差。次の式によって求められる。
)
(
)
(
)
(
SV
TV
r
t
v
t
v
t
v
−
=
3.17
要求減速度,Areq(required deceleration)
目標車両との衝突を防止することができる最小減速度。次の式によって求められる。
[
]
[
])
(
)
(
2
)
(
)
(
r
c
2
r
TV
req
t
x
t
x
t
v
a
t
A
−
×
+
=
注記 xr(t)は,反応時間に起因する車間距離の減少量である。
3.18
当該車両,SV(subject vehicle)
この規格で定義するFVCWSを装備する車両。
3.19
目標車両,TV(target vehicle)
SVの前方進路上の最も近いFVで,FVCWSを作動させるFV。
3.20
衝突までの時間,TTC(time to collision)
次の式で求められるように,SVがTVと衝突するまでの推定時間。
)
(
)
(
TTC
r
c
t
v
t
x
−
=
3.21
加速度考慮の衝突までの時間,ETTC(enhanced time to collision)
次の式に示されるように,SVとTVとの間の相対加速度が一定であると想定した場合の,SVがTVと
衝突するまでの推定時間。
)
(
)
(
2
)
(
)
(
ETTC
SV
TV
c
SV
TV
2
SV
TV
SV
TV
a
a
x
a
a
v
v
v
v
−
×
−
×
−
−
−
−
−
=
ここに,
aTV: TVの加速度
aSV: SVの加速度
vTV: TVの速度
vSV: SVの速度
xc: SVとTVとの車間距離
3.22
警報制動,WB(warning braking)
ブレーキを自動的に起動させて運転者に警報を与える動作。
3.23
警報手段(FVCWS warning modalities)
警報を運転者に伝達するために使用される手段。
例 視覚,聴覚,及び/又は触覚。
5
D 0802:2015 (ISO 15623:2013)
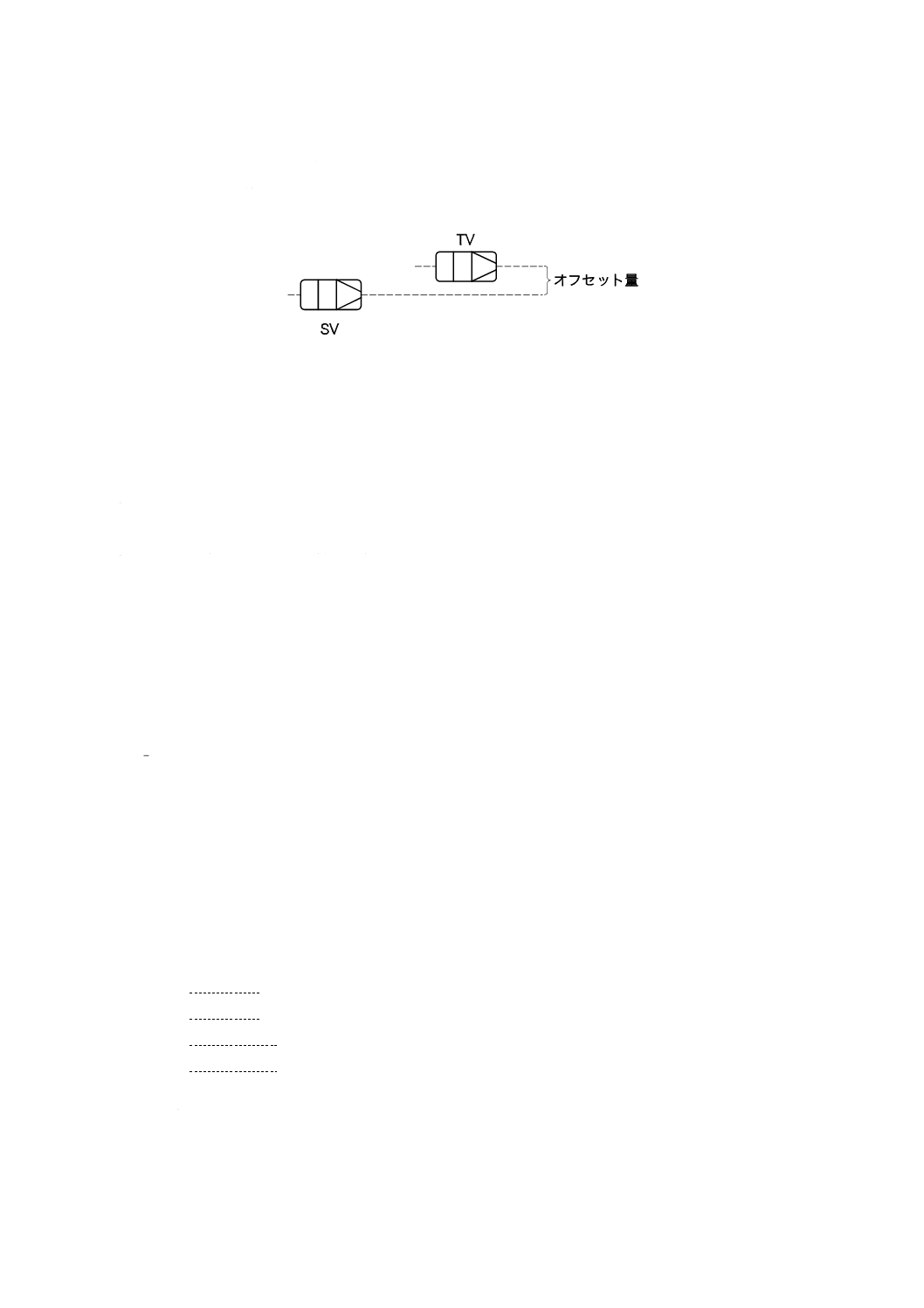
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.24
横方向オフセット(lateral offset)
SVとTVとの中心線を基準としたオフセット量。SVの横幅に対する割合で表す。
4
記号及び略語
この規格で用いる主な記号及び略語は,次による。
alateral̲max
試験時の最大横加速度
amin
SV緊急ブレーキ時の最小減速度
d0
距離計測はできないが,検知できる最小距離
d1
距離を計測できる最小距離
d2
割込み車両との距離を計測できる最小距離
dmax
距離を計測できる最大距離
h
最高地上検知高さ
h1
最低地上検知高さ
RCTT
赤外線反射器に対する試験目標物の反射係数
Tresp
運転者のブレーキ反応時間
Tb
ブレーキシステム反応時間
RCS
レーダ有効反射断面積
Vcircle̲start
試験開始時の試験車両の速度
Vmax
システムが作動可能な最大車両速度
Vmin
システムが作動可能な最小車両速度
WL
車線幅
WV
SVの車両幅
Vrel
システムが作動可能である相対車両速度
Vrel̲max
システムが作動可能である最大相対車両速度
Vrel̲min
システムが作動可能である最小相対車両速度
vr(t)
SVとTVとの間の相対速度
vTV
TVの速度
vSV
SVの速度
aTV
TVの加速度
aSV
SVの加速度
注記 上記の略語及び記号で点線の下線を施している個所は,対応国際規格では欠落しているため追
加した。
6
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5
仕様及び要求事項
5.1
システム機能要件
FVCWSの目的は,運転者が追突を回避又は被害軽減することを支援する警報を提供することである。
これらの警報は,最も頻度の高い追突を運転者がブレーキだけの操作によって,回避することができるタ
イミングで発することが望ましい。煩わしさ又は間違いと判断されるようなタイミングで警報を発するこ
となく衝突を回避する,又は衝突の被害を軽減するために十分なタイミングで警報を発することが望まし
い。FVCWSは警報だけを提供するものであり,衝突を軽減するための車両制御を実行しない。
SVが,全車速域ACCなどの車両の他のシステムによって自動ブレーキが制御されているとき,FVCWS
は異なる作動をする可能性がある。この状況では,FVCWSは,自動ブレーキシステムの機能を考慮する
ことができる。車両が自動ブレーキ制御中,FVCWSは,警報基準及び警報仕様に従わなくてもよい。
5.2
必須機能
FVCWSを備える車両は,次の機能を装備する。
− FVの存在を検知する。
− SVに対する,検知したFVの相対位置及び動的位置を決定する。
− SVの速度を決定する。
− SVの進路を推定する(クラスII及びクラスIII:5.6を参照)。
− FVCWSの機能及び要件に従って運転者に警報を発する。
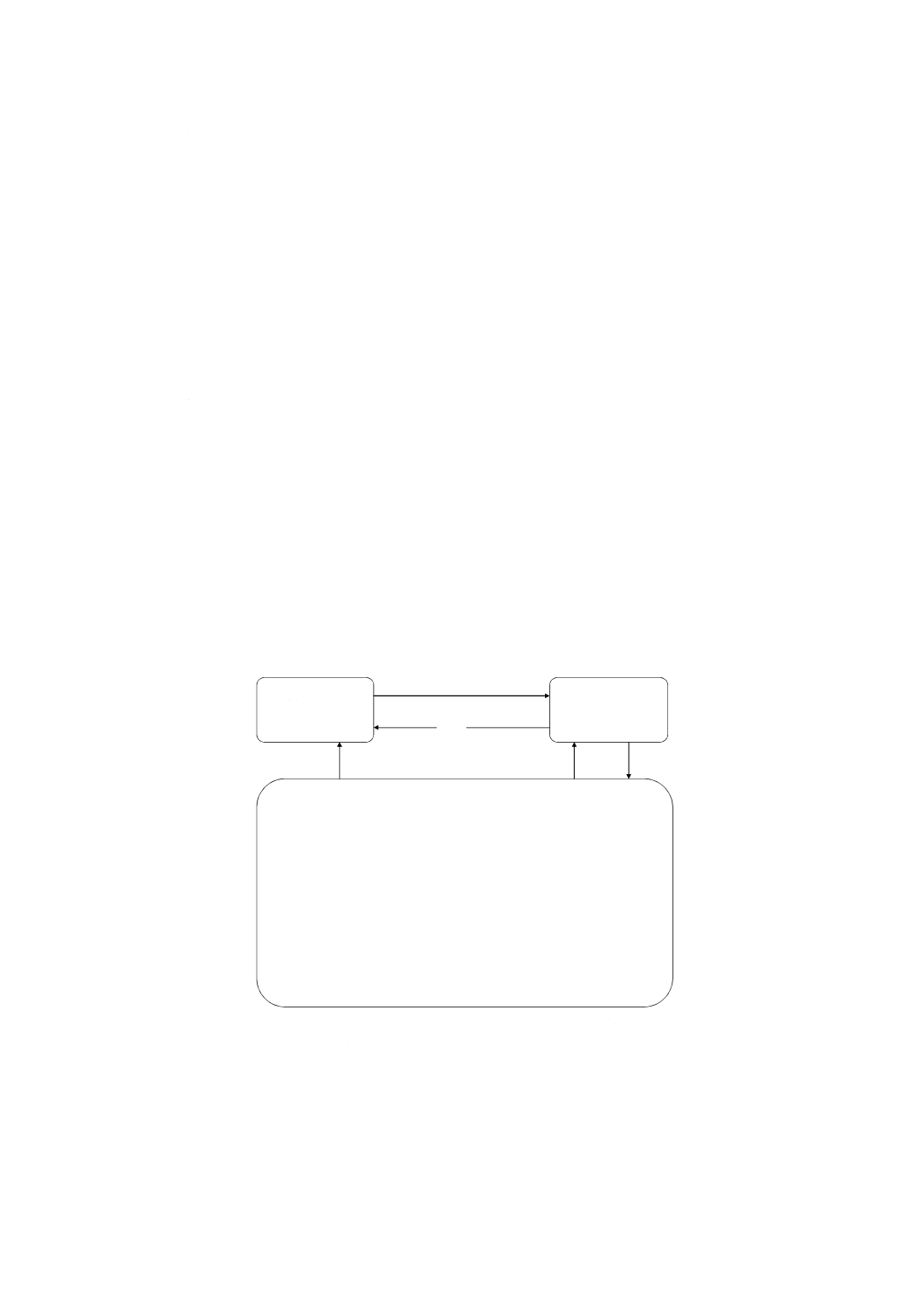
5.3
動作モデル
図2は,FVCWSの状態遷移図を示す。
アクティブ(3)
オフ(1)
スタンバイ(2)
[1--2]
[2--1]
[3--2]
[2--3]
[3--1]
[1-2] エンジン作動中,又はエンジン作動中及びオン/オフスイッチオン(オン/オフスイッチがある場合)
[2-1] イグニションオフ若しくはオン/オフスイッチオフ又は故障状態
[3-1] イグニションオフ若しくはオン/オフスイッチオフ又は故障状態
[2-3] Vmin≦速度≦Vmax,かつ,ギヤが前進位置
[3-2] (Vmin>速度),(速度>Vmax),ギヤがバック位置又はパーキング位置
図2−FVCWS状態遷移図
オフ(1)
スタンバイ(2)
アクティブ(3)
[1-2]
[2-1]
[3-1]
[3-2]
[2-3]
7
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.1
状態の機能説明
FVCWSの各状態で実行される機能について説明する。
5.3.1.1
FVCWSオフ(1)
FVCWSオフ状態では,いかなる警報も発しされない。イグニションオン中の,FVCWSの状態を運転者
が選択できる手段を備えるのは任意である(例 オン/オフスイッチ)。イグニションオフ中,FVCWSは
FVCWSオフ状態に遷移する。自己診断機能が,FVCWSが適切な性能を実現できないと判断した場合は,
常にFVCWSはFVCWSオフ状態に遷移する。
5.3.1.2
FVCWSスタンバイ(2)
FVCWSスタンバイ状態では,いかなる警報も発しされない。この状態では,FVCWSは車両速度及びギ
ヤの位置を監視する。車両速度がFVCWS作動範囲内にあり,ギヤの選択が前進位置(バック及びパーキ
ングを除く全てのギヤ位置)になると,システムはスタンバイ状態からアクティブ状態に遷移する。イグ
ニションオンが完了し,エンジンが作動する,又はエンジンが作動して任意のオン/オフスイッチが“オ
ン”位置になった場合,FVCWSは,FVCWSオフ状態からFVCWSスタンバイ状態に入る。オン条件が満
たされない場合,すなわち,車両速度の値がFVCWS作動範囲外にある,バックギヤが選択されている,
又はパーキングが選択されている場合,FVCWSはアクティブ状態からこの状態に遷移する。
5.3.1.3
FVCWSアクティブ(3)
警報条件が満たされると,常に警報が発しされる。ギヤ選択が前進位置のいずれかにあり,車両速度の
値がFVCWS作動範囲内にある場合,FVCWSはこの状態に遷移する。
5.3.2
作動限界
Vminの値は,最大で11.2 m/sにしなければならない。Vmaxの値は,最小で27.8 m/sとし,SVの最大速度
が,27.8 m/s以下の場合は,SVの最大速度とする。Vrel̲minの値は,最大で4.2 m/sにしなければならない。
Vrel̲maxの値は,最小で20 m/sにしなければならない。
5.4
警報機能要件
FVCWSは,動いている(“センサが動いていると検出するが,現在は停止しているもの”も含む。)車
両に対する警報を発するものとする。静止している車両(絶対速度が4.2 m/s以下)に対する警報について
は任意である。FVCWS警報は,次の機能に従って発しされる。
5.4.1
障害車両とSVとの間の距離及び相対速度の検出
前方にある障害車両を,光学レーダ,電波レーダ,画像処理装置などの障害物検知機器で検出する。
5.4.2
衝突タイミングの判断
衝突可能性のタイミングを判定するための一つの可能な方法は,SV速度,障害車両までの距離,SVと
障害車両との間の相対速度並びにSV及び障害車両の減速度を推定した結果によるものである。システム
が同時に多数の車両を検出した場合,何の行動もとらなければ,SVが最初に衝突する可能性のあるSVの
予想される軌跡にある一車両を,システムは障害車両として選択しなければならない。
5.4.3
予備衝突警報及び衝突警報(附属書A参照)
FVCWSは,運転者に衝突警報を発しなければならない。予備衝突警報は任意である。予備衝突警報の
目的は,前方衝突の可能性の存在を運転者に知らせることである。この場合,運転者は,追突可能性を回
避するために必要な行動をとる準備をすることが望ましい。システムが衝突警報に先立ってこの警報を発
しようとしたとしても,急速に変化する状況が発生して,その結果,予備衝突警報なしに衝突警報が発せ
られる可能性がある。衝突警報の目的は,差し迫った追突を回避又は低減するために行動をとる必要性を
運転者に知らせることである。
8
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
警報は視覚,聴覚及び/又は触覚に訴える手段を単独又は組み合わせて使用する。しかしながら,衝突
警報の場合は,視覚警報並びに聴覚及び/又は触覚に訴える警報が運転者に発しなければならない。
警報はSVと障害車両との間の相対速度,SV速度,車間距離,空走時間(運転者のブレーキ反応時間)
及びSVとFVとの減速度に応じて発しされる。
SVがFVに接近しているとき,警報距離は,要求減速度しきい値に従って決定することが望ましい。も
し,他の警報起動方法を使用する場合はそれと同等の基準に従って決定することが望ましい。
5.5
警報要素要件
5.5.1
FVCWS出力
FVCWSは,運転者に衝突警報を提供するものとする。予備衝突警報は任意である。
5.5.2
警報様式
5.5.2.1
FVCWS衝突警報は,視覚警報,並びに聴覚及び/又は触覚に訴える警報を含まなければならな
い。
5.5.2.2
FVCWS予備衝突警報は,視覚,聴覚又は視覚と聴覚との組合せを含まなければならない。補足
の触覚警報手段は,予備衝突警報では任意である。
5.5.2.3
SVの運転者がブレーキを操作している場合,WBを,衝突警報には使用しないことを推奨する。
5.5.2.4
SVで自動ブレーキが適用されている場合(すなわち,自動ブレーキが作動中である場合),衝突
警報及び予備衝突警報には,WBを使用してもよい。
5.5.2.5
警報ブレーキは,1秒間未満の持続時間で適用しなければならない。結果として,0.5 g未満の減
速度及び2 m/s以下の速度減少でなければならない。警報ブレーキの有効性を保証するため,100ミリ秒間
の平均減速度は0.1 g以上としなければならない。
5.5.2.6
警報音は,容易に聞くことができるとともに,前方向脅威に関係ない警報(例 側方衝突警報)
と容易に識別できるよう,選択されなければならない。
5.5.2.7
FVCWS衝突警報としてシートベルトプリテンショナの作動を使用してもよい。
5.5.3
要求減速度しきい値
5.5.3.1
要求減速度がAreqのしきい値を超えたとき,FVCWSは衝突警報を発しなければならない。しき
い値Areqは,乾燥道路及び温暖な天気条件で(5.5.4の反応時間の値を考慮して),0.68 g以下でなければな
らない。
5.5.3.2
運転者が警報タイミングを調整できるFVCWSは,5.5.3.1の要求減速度しきい値Areq要件を満た
す設定が,調整範囲に含まれなければならない。
5.5.3.3
FVCWSは,より低い要求減速度しきい値にて予備衝突警報を発してもよい。
5.5.3.4
衝突警報及び予備衝突警報の要求減速度しきい値は,検出された道路条件,環境及び運転者の状
態,運転者の挙動及び異なる運転シナリオに基づき,適合させてもよい。
5.5.3.5
SVで自動ブレーキが適用されている場合,自動ブレーキシステム(例 ACCシステム)の最大
減速度機能を超えるよう,Areqの値を変更することは任意である。
5.5.4
反応時間
5.5.4.1
警報に対する運転者の反応時間[運転者のブレーキ反応時間(Tresp)]は,警報タイミングの計
算に組み込むものとする。Tresp値は0.8秒間以上とする。
5.5.4.2
運転者が警報タイミングを調整できるFVCWSは,5.5.4.1のTresp要件を満たす設定が,調整範
囲に含まれなければならない。
5.5.4.3
ブレーキシステム反応時間(Tb)は,要求減速度の計算に組み込んでもよい。ブレーキシステム
9
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
反応時間値の選択は,FVCWS設計者に委ねられる。
5.5.4.4
運転者のブレーキ反応時間(Tresp)及びブレーキシステム反応時間(Tb)は,SV運転者がブレ
ーキを適用している場合,ゼロに設定してもよい。
5.5.4.5
SVで自動ブレーキが適用されている場合,警報に対する運転者の反応時間[運転者のブレーキ
反応時間(Tresp)]は,要求減速度の計算においてゼロに設定してもよい。
5.5.5
警報禁止要求事項
5.5.5.1
SVの減速度が要求減速度しきい値以上である状況においては,衝突警報及び予備衝突警報を発
してはならない。
5.5.5.2
表1の各クラスに設定された曲率半径要件の道路においては,SVの走行路以外にある障害車両
に対して衝突警報及び予備衝突警報を発してはならない。
5.5.5.3
SVの前方に割り込む車両に関して,その割り込み車両の速度がSVの速度よりも速い場合には衝
突警報及び予備衝突警報を発しないことを推奨する。
5.5.5.4
SVの運転者がブレーキ操作を行っている場合,衝突警報は抑制又は遅延されてもよい。
5.5.5.5
TTCが4.0秒間を超える状況では,衝突警報は抑制又は遅延されてもよい。
5.5.5.6
SVの車線変更若しくは大きな挙動変化が検知された場合,アクセルオーバライド(SVの運転者
がアクセル操作によって自動ブレーキを無効にしている。)が検知された場合,又はACCシステムが最大
能力でブレーキを作動させていることを運転者に知らせる警報が発しされている場合,衝突警報は抑制又
は遅延されてもよい。
5.5.5.7
平常時に用いられるステアリング操作(平均横加速度が3.5 m/s2以下)によってTVとの衝突が
回避可能である状況では,衝突警報は抑制又は遅延されてもよい。
5.5.5.8
5.3.2に規定される作動限界を超える状況では,衝突警報は抑制又は遅延されてもよい。
5.5.6
警報距離の計算例
警報開始が要求される最小距離は,Tresp=0.8秒間及びAreq=6.67 m/s2(3.17に規定のAreq算出式を参照)
に基づき次の式で求めることができる。
r
TV
2
r
c
8.0
)
67
.6(
2
min̲
̲
v
a
v
Warning
x
+
−
×
=
5.5.7
警報距離計算と等価な警報方法
5.5.6とは異なる警報タイミングの計算方法(例 TTC又はETTC)を用いるシステムも許されるが,そ
のようなシステムも5.5.3〜5.5.5の要求事項を満たさなければならない。
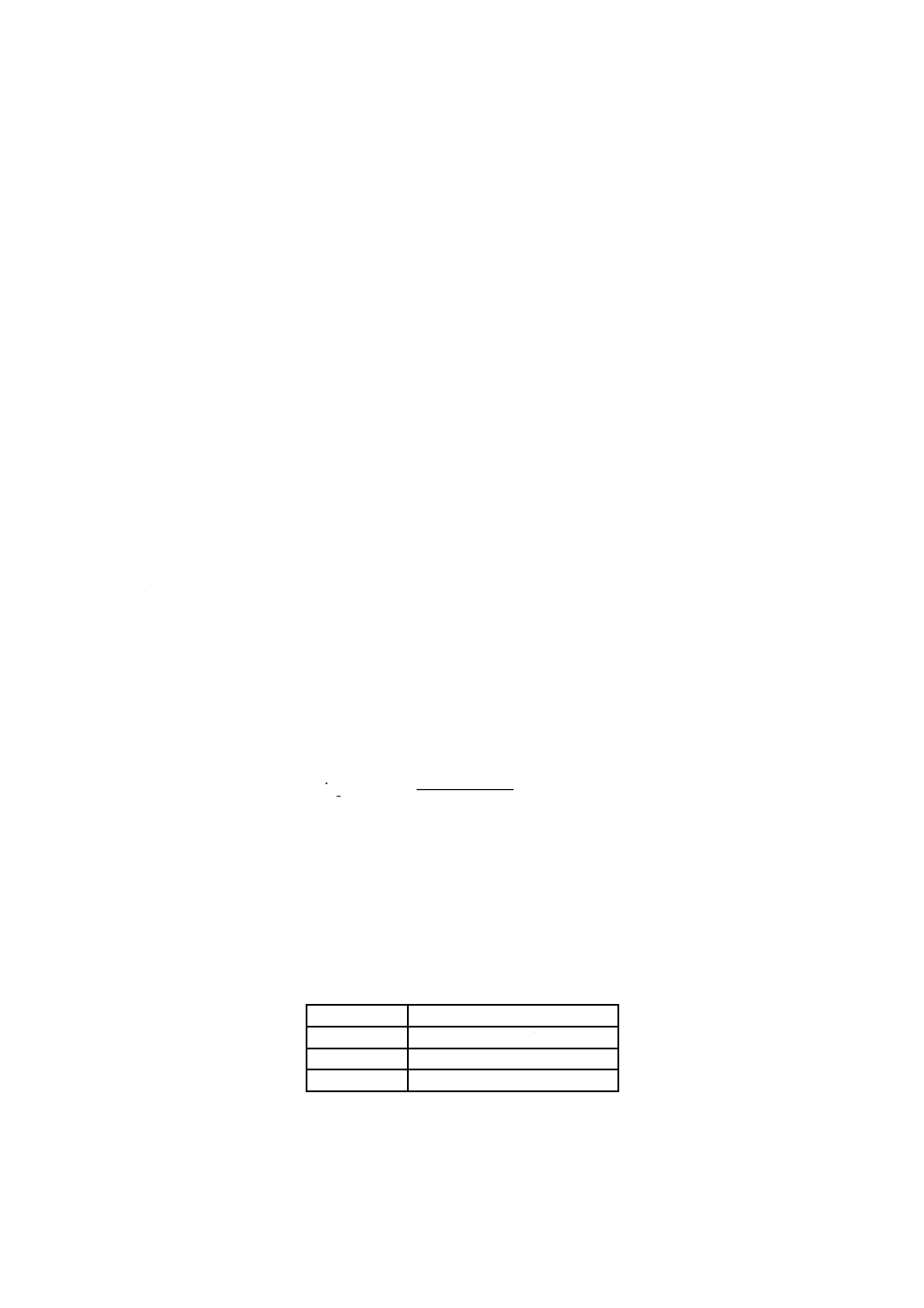
5.6
システムの分類
FVCWSは,表1のカーブ曲率半径対応能力によって三つのクラスに分類する。
表1−システムの分類
クラス
カーブ曲率半径対応能力
I
曲率半径500 m以上
II
曲率半径250 m以上
III
曲率半径125 m以上
クラスIのシステムは,曲率半径500 m以上のカーブ内でSVの進路上に存在する前方障害車両を検知
する能力をもっていなければならない。
10
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
クラスIIのシステムは,曲率半径250 m以上のカーブ内でSVの進路上に存在する前方障害車両を検知
する能力をもっていなければならない。
クラスIIIのシステムは,曲率半径125 m以上のカーブ内でSVの進路上に存在する前方障害車両を検知
する能力をもっていなければならない。
5.7
障害車両検知範囲及び検知性能
5.7.1
障害車両検知範囲
5.7.1.1
最小検知範囲(クラスI,クラスII及びクラスIII)
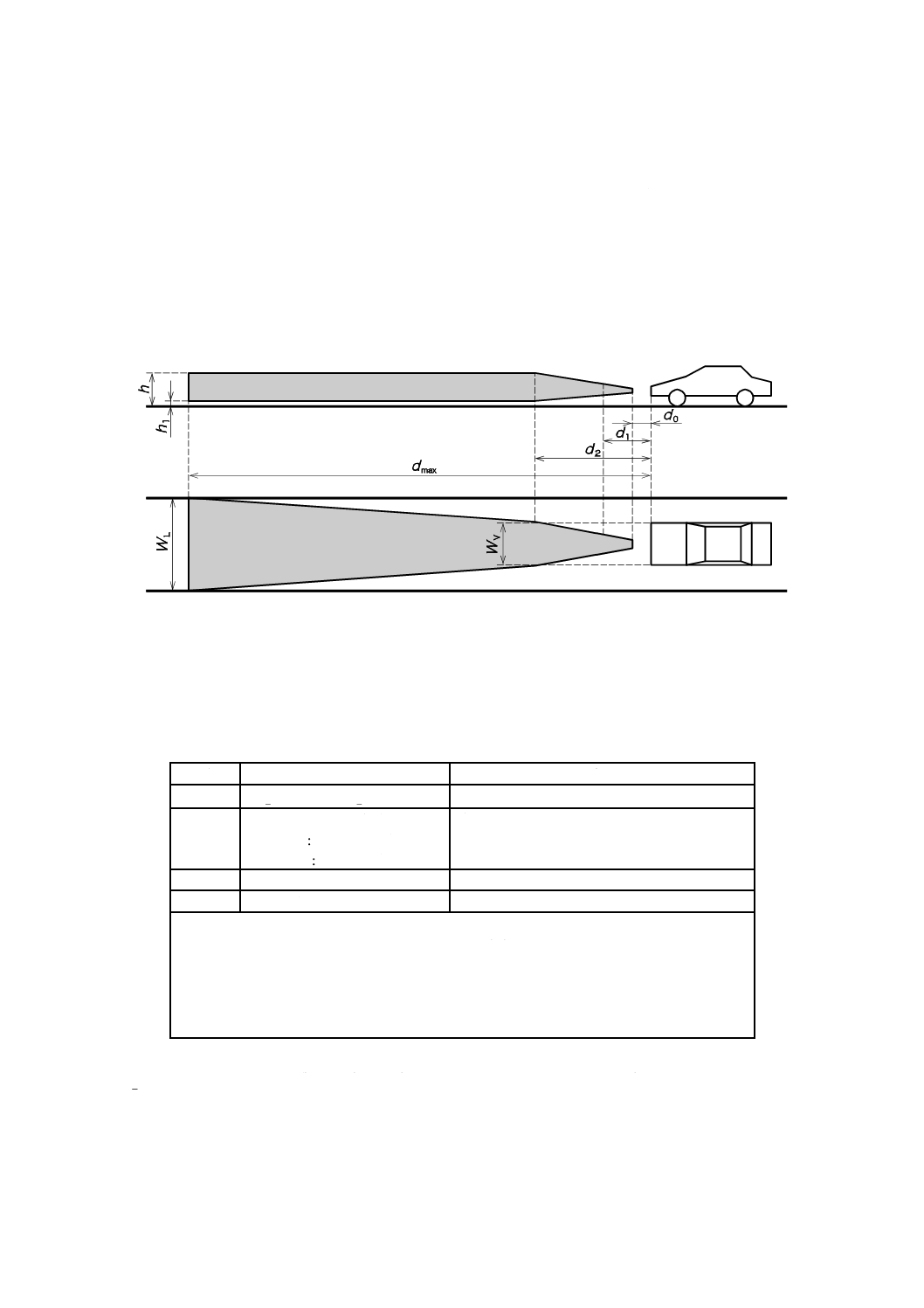
最小検知範囲を図3に示す(記号の説明は表2及び表3を参照)。
図3−検知範囲
5.7.1.1.1
検知距離
検知距離の要求事項は,表2に示す。
表2−検知距離の要求事項
距離
計算式又は数値
摘要
dmax
Vrel̲max×Tmax+Vrel̲max2/2amin
システムが距離を計測できる最大距離
d2
クラスI: 10 m以下
クラスII: 7.5 m以下
クラスIII: 5 m以下
横方向オフセットが20 %未満のFVとの距離
を計測できる最小距離
d1
Tmin×Vmin
システムが距離を計測できる最小距離
d0
2 m以下
距離計測機能はないが,検知できる最小距離
ここに,
Vrel̲max:システムが作動可能である最大相対車両速度(m/s)
Vmin:システムが作動可能な最低車両速度(m/s)
Tmax:警報後,運転者のブレーキ反応最大時間(s)
Tmin:警報後,運転者のブレーキ反応最小時間(s)
amin:SV緊急ブレーキ時の最小減速度(m/s2)
Vrel̲max及びVminは,車両の製造業者が決定する設計パラメータであり,一方Tmax,Tmin及びaminは,次
の数値(附属書A参照)とする。これらを使用してdmaxとd1とを計算することが望ましい。選択された
検出範囲は,5.5.3及び5.5.4の要求事項を満たすものとする。
Tmax=1.5 s
11
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Tmin=0.4 s
amin=3.6 m/s2
5.7.1.1.2
検知幅及び検知高さ
検知幅及び検知高さの要求事項は,表3に示す。
表3−検知幅及び検知高さの要求事項
距離
最小検知幅
検知高さ
dmax
WL(車線幅)m
h(最高地上検知高さ)=1.1 m
h1(最低地上検知高さ)=0.2 m
d2
WV(SVの車両幅)m
h(最高地上検知高さ)=1.1 m
h1(最低地上検知高さ)=0.2 m
d1
規定なし
規定なし
d0
規定なし
規定なし
5.7.1.2
曲率半径に対応した検知範囲
曲率半径に対応した検知範囲の角度は曲率半径に応じて拡大しなければならない(附属書B参照)。
5.7.2
警報距離の精度
警報距離が固定のシステムは,FVCWSの設計警報距離と最大許容誤差(±2 m又は±15 %)の範囲で
警報を発しなければならない。
この要件の反復試験は,周辺環境の違いに起因するシステムの性能によって起こり得る警報距離のばら
つきを排除するため,同一の条件下で実施しなければならない。
なお,警報距離が固定でないシステムとは,その警報タイミングが,例えば,検知された路面状態,道
路環境,運転者の状態,運転操作,運転シナリオなどの関数で決定されるシステムをいう。
5.7.3
TVの識別能力
5.7.3.1
縦方向の識別
SV前面からの距離d1からdmaxまでの検知範囲内に,2台以上の障害車両がある場合,システムはSVの
走行路内で最も近い車両をTVとして選択しなければならない。
5.7.3.2
横方向の識別
SVの走行路内又は隣接した位置に,2台以上の障害車両がある場合,システムはSVの走行路内にある
車両をTVとして選択しなければならない。
5.7.3.3
頭上方向の識別
道路上の4.5 mを超える高さに標識などの頭上の物体がある場合,システムはこれらの物体をTVとし
て選択してはならない。
5.8
カーブでのFVCWS性能
FVCWSは,直線道路並びにカーブ曲率半径対応能力のクラスIでは500 m以上,クラスIIでは250 m
以上及びクラスIIIでは125 m以上の曲率半径のカーブに存在するSVの走行路内の障害車両に対して警告
する性能をもたなければならない。
5.9
使用者安全要求事項
5.9.1
光学レーダ
光学レーダは,JIS C 6802で規定するクラス1レーザの要求事項を満足しなければならない。
12
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.9.2
電波レーダ
電波レーダの仕様は,将来制定される国際規格に準拠するものとする。
5.10 ヒューマンインタフェースに関する要求事項
5.10.1 警報の出力仕様
視覚,聴覚及び触覚へ訴える全ての警報は,運転者が知覚可能なものとする。視覚及び聴覚警報につい
ては,表4に示す特性を満たすことを推奨する。
なお,表4の内容は例であり,衝突警報及び予備衝突警報の要求事項は5.5.2に従う。
表4−警報特性
種類
視覚警報
聴覚警報
衝突警報
色:赤
位置:SVの運転者の注視視野の方向
輝度:昼間でも十分な輝度で,かつ,
夜間にまぶしくないもの
発光間隔:短間隔の点滅を推奨
音圧:高い緊急性を伝えるために,車内の他の全ての聴覚
警報以上の音圧
トーン:容易に聞くことができ,車内の他の警報と容易に
識別できるもの
発音間隔:短間隔の断続音を推奨
予備衝突警報 色:黄色又はアンバー
輝度:日中でも十分に認識でき,かつ,
夜間はまぶしくないもの
発光間隔:連続又は長間隔の点滅
音圧:音圧は周囲の騒音以上とする
トーン:うるさくない音色
発音間隔:連続音又は長間隔の断続音若しくは単発音
5.10.2 他の警報との干渉
FVCWSが,後方又は側方の障害車両警報システムなどの他の警報システムとともに備えられている場
合であっても,運転者によって明確に警報が識別されなければならない。
5.10.3 システム作動状態の表示
FVCWSの作動状態を明白にする,次のような表示を備えなければならない。
5.10.3.1 作動中の表示
FVCWSが作動していることを運転者に知らせる表示器を備える(例えば,点灯式電源スイッチ)。
5.10.3.2 故障中の表示
FVCWSが故障していることを運転者に知らせる表示器を備える(例えば,表示パネル上への“故障”
の表示)。
5.11 システム限界の周知
FVCWSの使用者に,取扱説明書,注意ラベルなど適切な手段を使用して,次のようにシステムの限界
を知らせなければならない。
例 “正面衝突,交差点衝突,並びにセンサの能力限界(短曲率半径を含む。)及びシステムの使える
最大速度(Vmax)を超えている場合には,このシステムは利用できません。”
6
検知性能を測定する評価試験方法
6.1
試験目標物の仕様
6.1.1
光学レーダ方式
試験目標物は,代表的な二輪自動車の大きさ,輪郭及び表面形状とともに,二輪自動車で代表される反
射係数(RCTT)で規定する。
13
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.1.2
電波レーダ方式
試験目標物は,二輪自動車で代表されるレーダ有効反射断面積(RCS)で規定する。
注記 実際の使用において自動車用障害車両検知センサの計測距離は比較的短いので,反射板上で平
面レーダ波を得ることは困難である。したがって,RCSは便宜上,実際に使用する距離で実測
した値を用いる。
試験目標物の形状の例を,附属書Dに記載する。
6.1.3
受動型光学式センサ
試験目標物は,代表的な二輪自動車又は乗用車の物理的大きさ,形状及び表面輪郭で規定する。
6.2
周辺環境の条件
周辺環境の条件は,次のとおりである。
− 試験場は平たんで,乾燥したアスファルト又はコンクリート舗装面とする。
− 外気温度範囲は,−20 ℃〜40 ℃とする。
− 水平視程は,1 km以上とする。
− 試験は昼光条件の下に行ってもよい。
6.3
検知範囲の試験方法
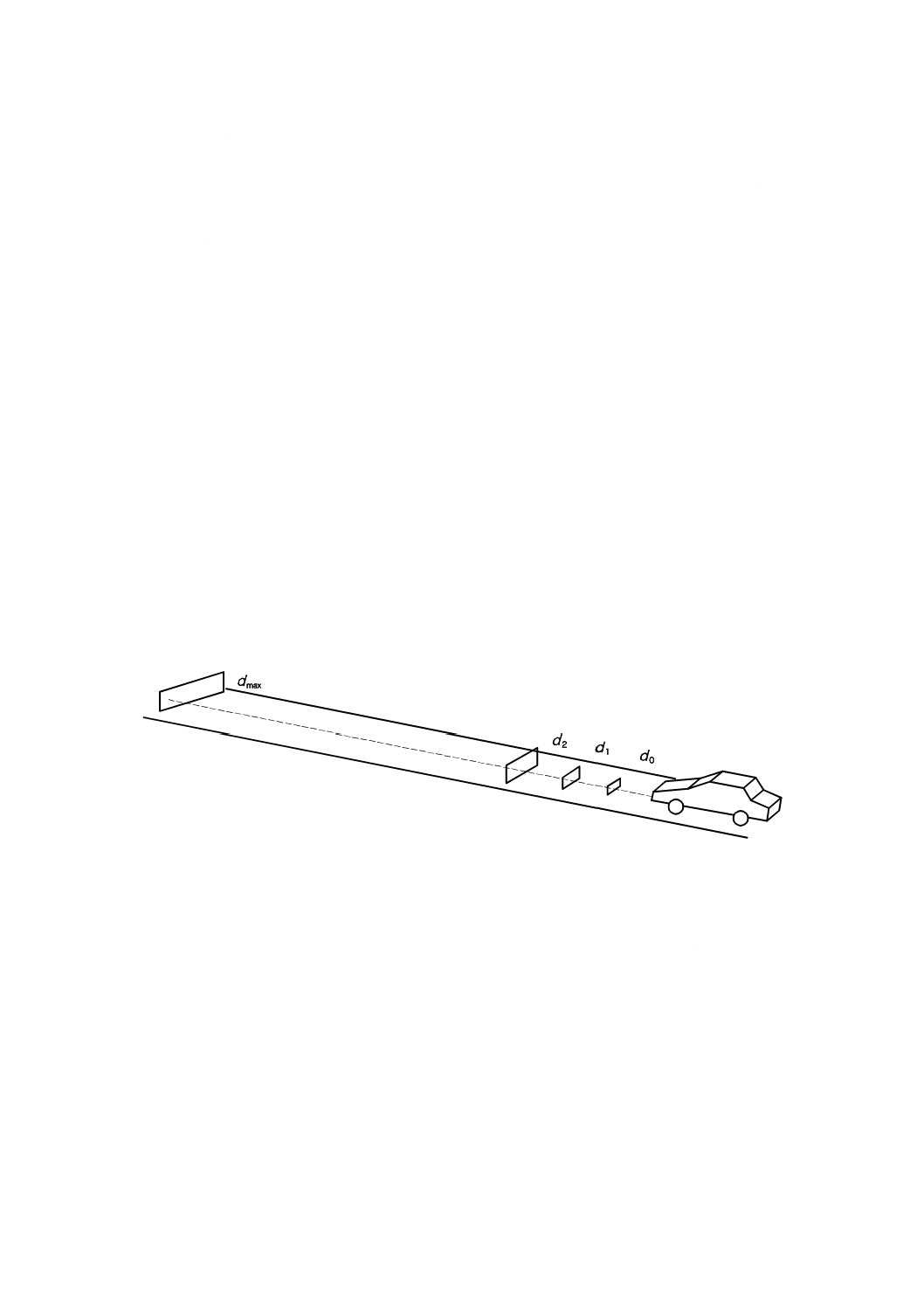
検知範囲の試験は,動的試験が実際的であるが静的試験を選択できる。FVCWSは,図4に示すd0〜d1
間の任意の距離に置いた試験目標物を検知できなければならない。
FVCWSは,図4に示すd1〜d2間の任意の距離に置いた試験目標物を検知できなければならない。シス
テムは,図4に示されているようにd2とdmaxとの両方の距離に位置する試験目標物を検知できるものとす
る。
図4−検知範囲
センサとECUとが統合されているときなどに特殊な測定機器がないと検知範囲が確認できない場合に,
製造業者は特殊な測定機器を使用してこの試験を実施して検査のための試験結果を提供してもよい。付加
的に,この試験は動的試験を許容するので,この試験方法の目的が果たされるように箇条6の別の試験と
同時に実施されてもよい。例えば,前に規定された試験目標物仕様を満たす試験車両が試験目標物として
使用されてもよい。この試験で規定される様々な距離での衝突警報が適切に作動することは,検知性能を
満足していると考えてもよい。
6.4
警報距離範囲及び精度の試験方法
6.4.1
警報距離範囲試験
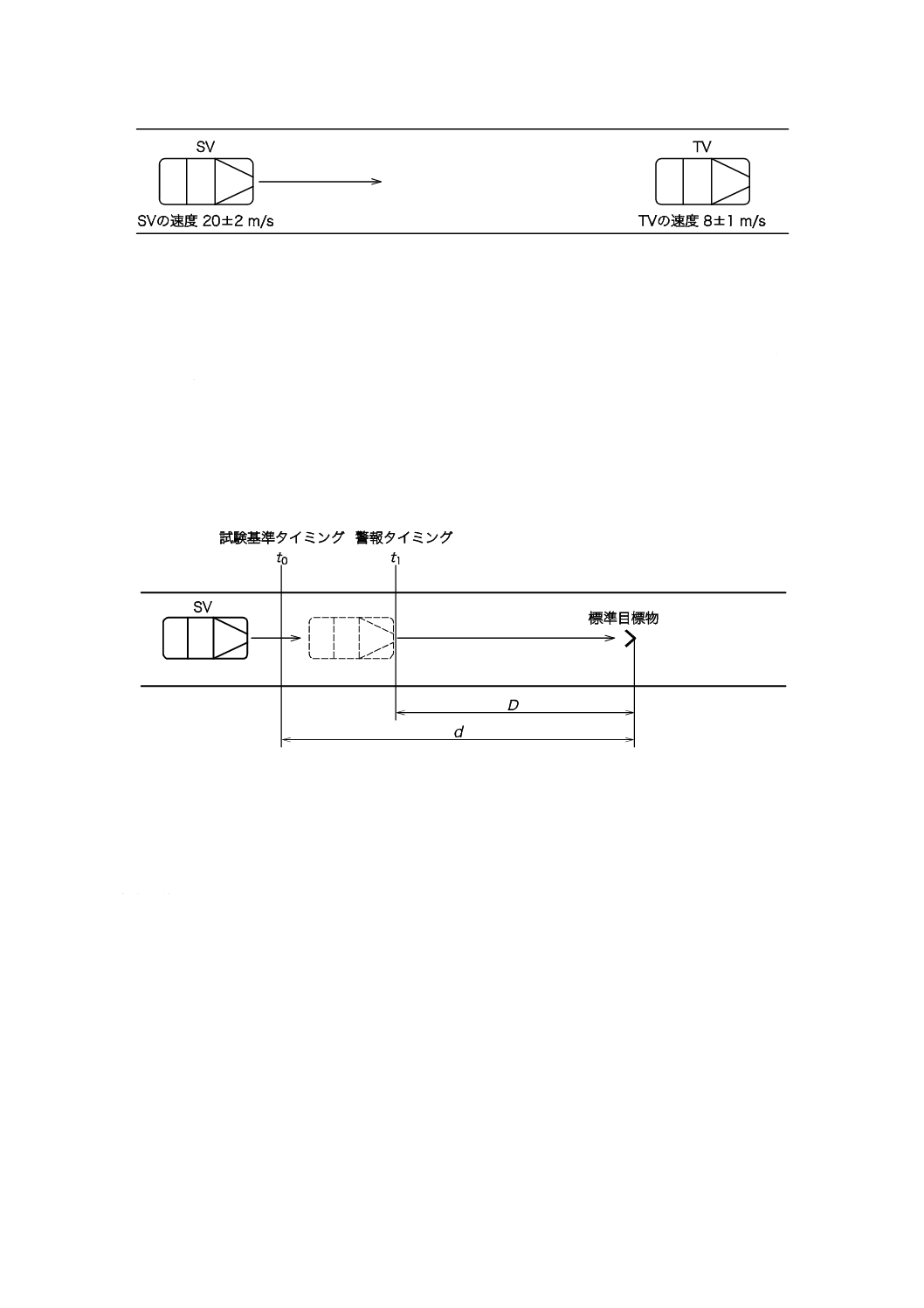
TV及びSVは,図5に示すように直線道路の同じ車線上を動いている。TVは速度8±1 m/sで動く。SV
は,速度20±2 m/sで動く。測定される警報距離は,5.5.6で計算された距離以上でなければならない。
14
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5−警報距離範囲試験
6.4.2
警報距離精度試験
この試験は走行状態の車両で実施する。
標準目標物は検出エリア内にあるものとする。図6に示すようにSVを速度V=20 m/sにて標準目標物
に向かって運転しながら,警報距離を次の手順によって測定する。
二つのタイミングを測定する。第1のタイミングt0は,SVから標準目標物までがdに等しい点である。
第2のタイミングt1は,警報が発せられる点である。標準目標物からの警報距離は,D=d−V×(t1−t0)と
して計算される。Dは製造業者が規定する警報距離と比較される。警報距離の精度は,繰返し試験の70 %
において5.7.2を満たすものとする。繰返し試験の回数は,7回以上でなければならない。
図6−警報距離精度試験
6.5
目標物識別能力の試験方法
この試験は走行状態の車両で実施する。この試験はSVが警報を発したとき終了する。また,この試験
は不必要な警報を防止する能力も試験しなければならない。例えば,試験を実施し警報が発せられないと
き試験は終了する。
6.5.1
縦方向の識別
図7に示すように検出エリアで2台のTVが,同じ速度20 m/sで走行している。SVは,2台のTVに速
度20 m/sで追従する。2台のTV間の時間差は,Tmin(0.6±0.1秒間)であり,2台のTVは近くのTVが
遠くのTVを隠さないように直線上に配置される。SVと近くのTVとの時間差は,Tmax(1.5秒間)を上回
ってもよい。SVは,システムが衝突警報を発するまで加速する。その後,SVは,同じ時間差(>1.5秒
間)が達成されるまで減速し,それから,再び同じ速度でTVに追従する。次に,その数秒後,近い側の
TVだけをSVが予備衝突警報を発するまで減速させる。SVが予備衝突警報を発すれば,この試験は終了
する。
15
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図7−縦方向の目標物識別能力試験
6.5.2
横方向の識別
6.5.2.1
直線道路における横方向識別試験
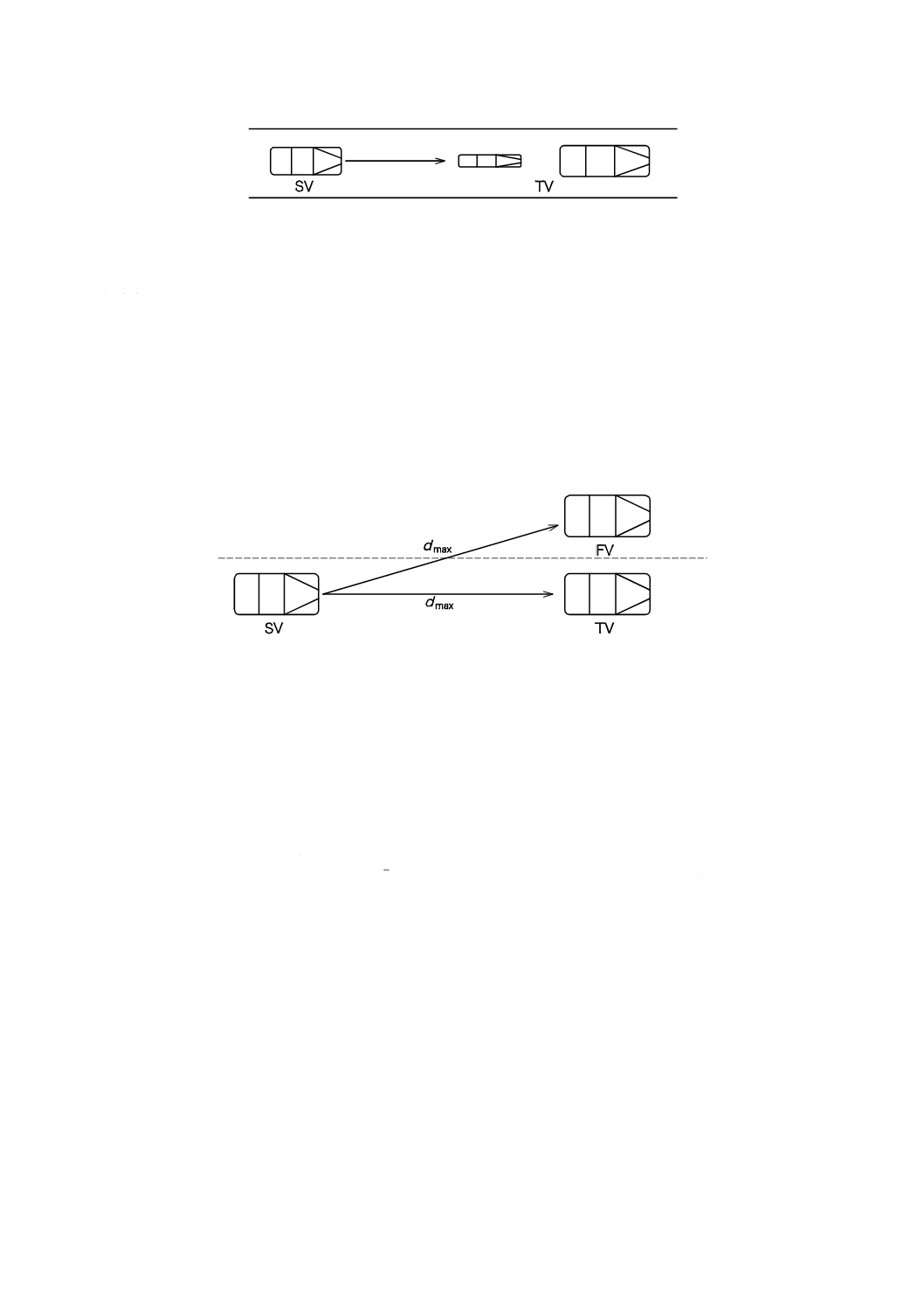
この試験は走行状態の車両で実施する。図8に示すようにSV及びTVは,20 m/sの同じ速度で,時間
差Tmax(=1.5秒間)にて運転する。FVは,20 m/sの同じ速度にてTVのそばを運転する。先行車両の縦
方向中心線間の間隔は,3.5±0.25 mである。先行車両の幅は,1.4〜2.0 mとする。TVの縦方向中心線に
対するSVの縦方向中心線の横方向ずれは,0.5 m未満とする。数秒間後,FVをSV及びTVの速度より著
しく減速させる。SVがFVを追い抜くまでにSVは警報を発してはならない。次の数秒間後,TVをSVが
予備衝突警報を発するまで減速させる。SVが予備衝突警報を発したら試験は終了する。
図8−直線道路における横方向の目標物識別能力試験
6.5.2.2
曲線道路における横方向識別試験
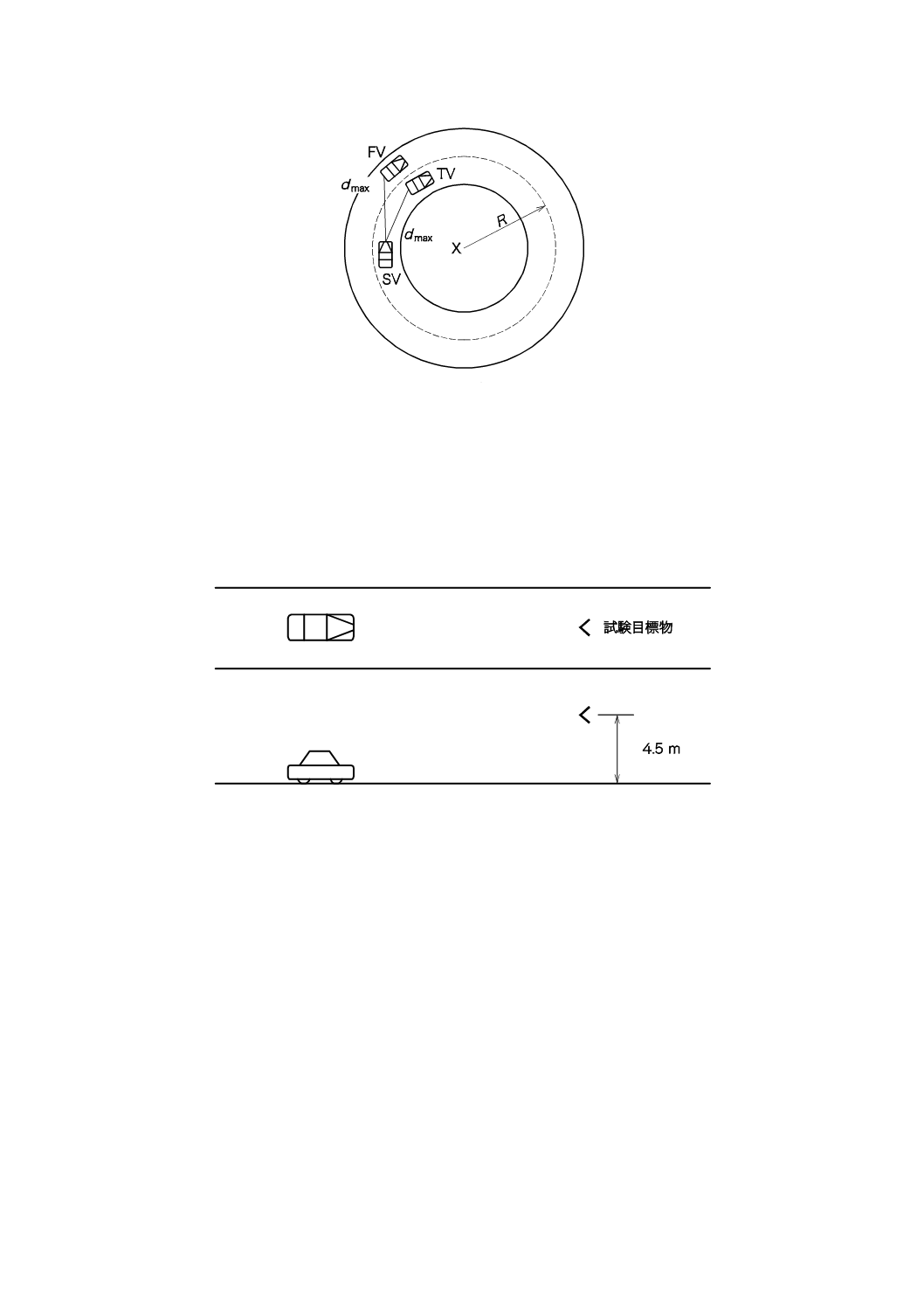
直線道路における試験に加えて,次の試験を円形路又は円形路の一部で行わなければならない。クラス
Iの場合は曲率半径500 m以上,クラスIIの場合は曲率半径250 m以上,クラスIIIの場合は曲率半径125
m以上とする。試験は動的に行わなければならない。SVとTVとを同一車線,同一速度で,警報を発しな
い車間距離で走行させる。試験開始時の試験車両の速度は,次の式による。
Vcircle̲start=min[(alateral̲max×R)1/2, Vmax]±1 m/s
ここに,
alateral̲max: クラスIの場合は2.0 m/s2,
クラスII,クラスIIIの場合は2.3 m/s2
図9に示すようにFVをTVと並んで外側車線を走行させる。数秒間後,FVを減速させ,SV及びTV
よりも著しく低速にさせる。SVがFVを追い抜くまでにSVは警報を発してはならない。次の数秒間後,
TVをSVが予備衝突警報を発するまで減速させる。SVが予備衝突警報を発したら試験は終了する。
16
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図9−曲線試験走行路及び目標物識別能力試験
6.5.3
頭上方向の識別
この試験は走行状態の車両で実施する。図10に示すように,誤警報を発する可能性のある試験目標物を
設置する。試験目標物は,コンクリート橋又は頭上の交通標識構造の代表的なものとする。SVは試験目
標物に近づき,その下を通過する。SVが警報を発しなかった場合,試験は終了する。試験目標物の高さ
は4.5 mである。
図10−頭上方向障害物識別試験
17
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
衝突警報の基礎的考察
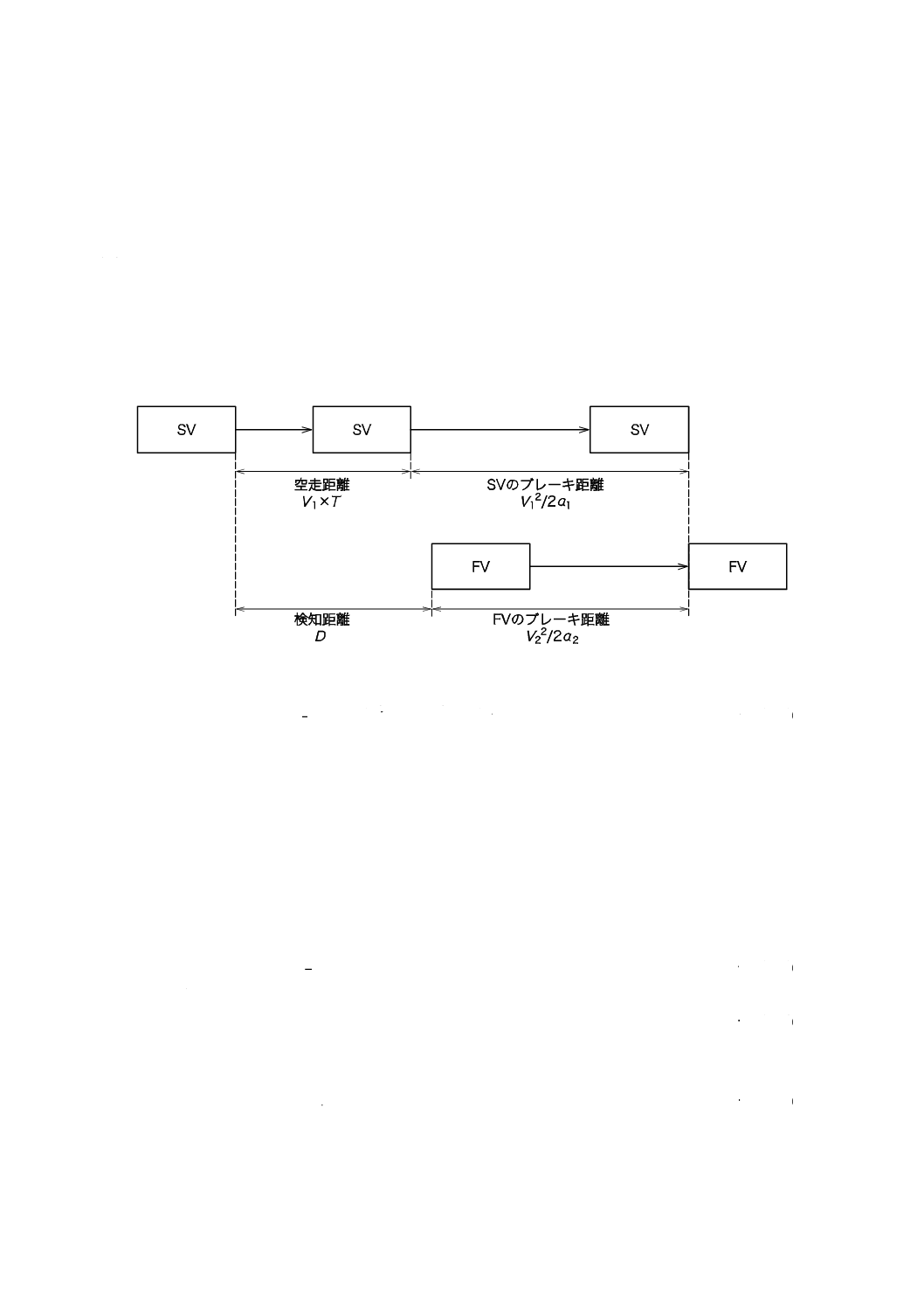
A.1 基礎方程式
基礎数学モデルは,図A.1に示すようにFV及びSVの絶対速度を用いて警報距離を計算する警報距離
アルゴリズムを基礎にしている。システムは障害車両までの測定距離と警報距離とを比較し,警報距離が
測定距離を超過しているとき運転者に警報する。予備衝突警報又は衝突警報を出す警報距離は,空走時間
(運転者のブレーキ反応時間)T及び車両減速度aを適切に選定することによって調整できる。
図A.1−警報距離算出原理
)
2/
2/
(
2
2
2
1
2
1
1
a
V
a
V
T
V
D
−
+
×
=
··················································· (A.1)
ここに,
D: FV(障害物)までの距離
V1: SVの速度
V2: FV(障害物)の速度
T: 空走時間(運転者のブレーキ反応時間)
a1: SVの減速度
a2: FV(障害物)の減速度
A.2 警報発生場面のシナリオ
警報発生の場面には多くのシナリオがあるが,代表的なシナリオを次に示す。
A.2.1 FVが,SVと同じ速度で走行している場合
T
V
D
×
=
1
1
············································································ (A.2)
A.2.2 FVが停止した障害車両である場合
1
2
1
1
2
2/a
V
T
V
D
+
×
=
································································ (A.3)
SVが一定速度で走行しているFVに接近しているときは,V1はSVとFVとの相対速度を意味する。
A.2.3 FVが相対速度Vrel=(V1−V2)で減速している場合
a
V
V
a
V
T
D
2/
)
/
(
2
rel
1
rel
−
×
+
=
······················································ (A.4)
18
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
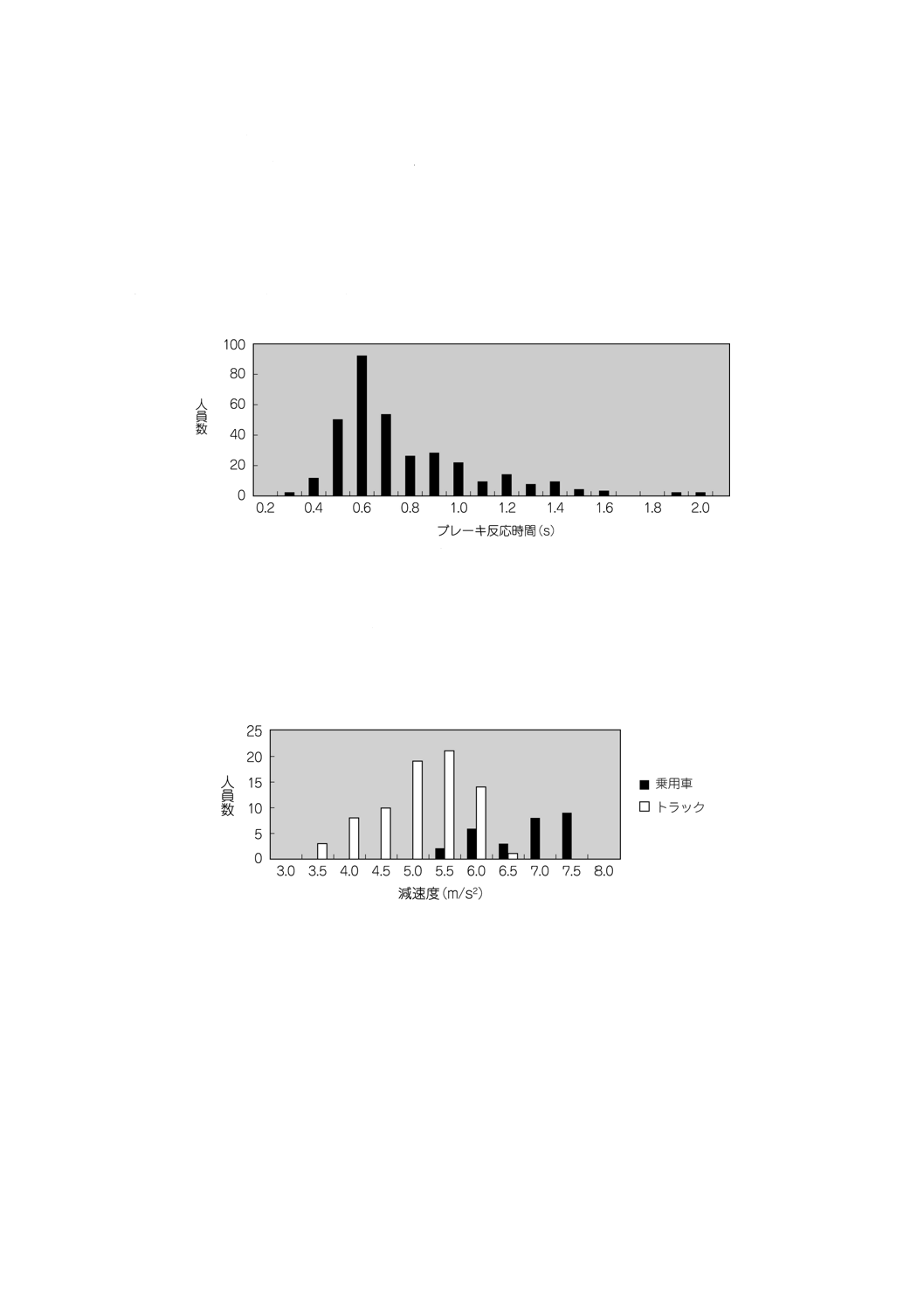
A.3 空走時間T及び減速度aの評価結果
A.3.1 空走(運転者のブレーキ反応)時間T
空走時間Tの値は,参考文献[1]参照。
空走時間T(運転者のブレーキ反応時間)の試験での測定値は,0.3〜2.0秒間以内に収まっている。Tの
平均値は0.66秒間である。この試験は参加人員321人で行い,笛の合図で運転者にブレーキを操作させ,
その遅延時間を測定している。測定値の分布は広範囲にばらついている。しかし,対象者の98 %は1.5秒
間以内に収まっている(図A.2参照)。
図A.2−運転者のブレーキ反応時間Tの分布
A.3.2 減速度a
減速度aとして,乾燥した平たんな道路で行った緊急ブレーキ性能評価を示す。減速度試験の結果,測
定値は3.6〜7.9 m/s2に収まっており,乗用車の平均値は7.0 m/s2,トラックの平均値は5.3 m/s2である。測
定値は,車種,積載量,運転者反応特性などによって非常に広範囲に分布している(図A.3参照)。
図A.3−減速度aの分布
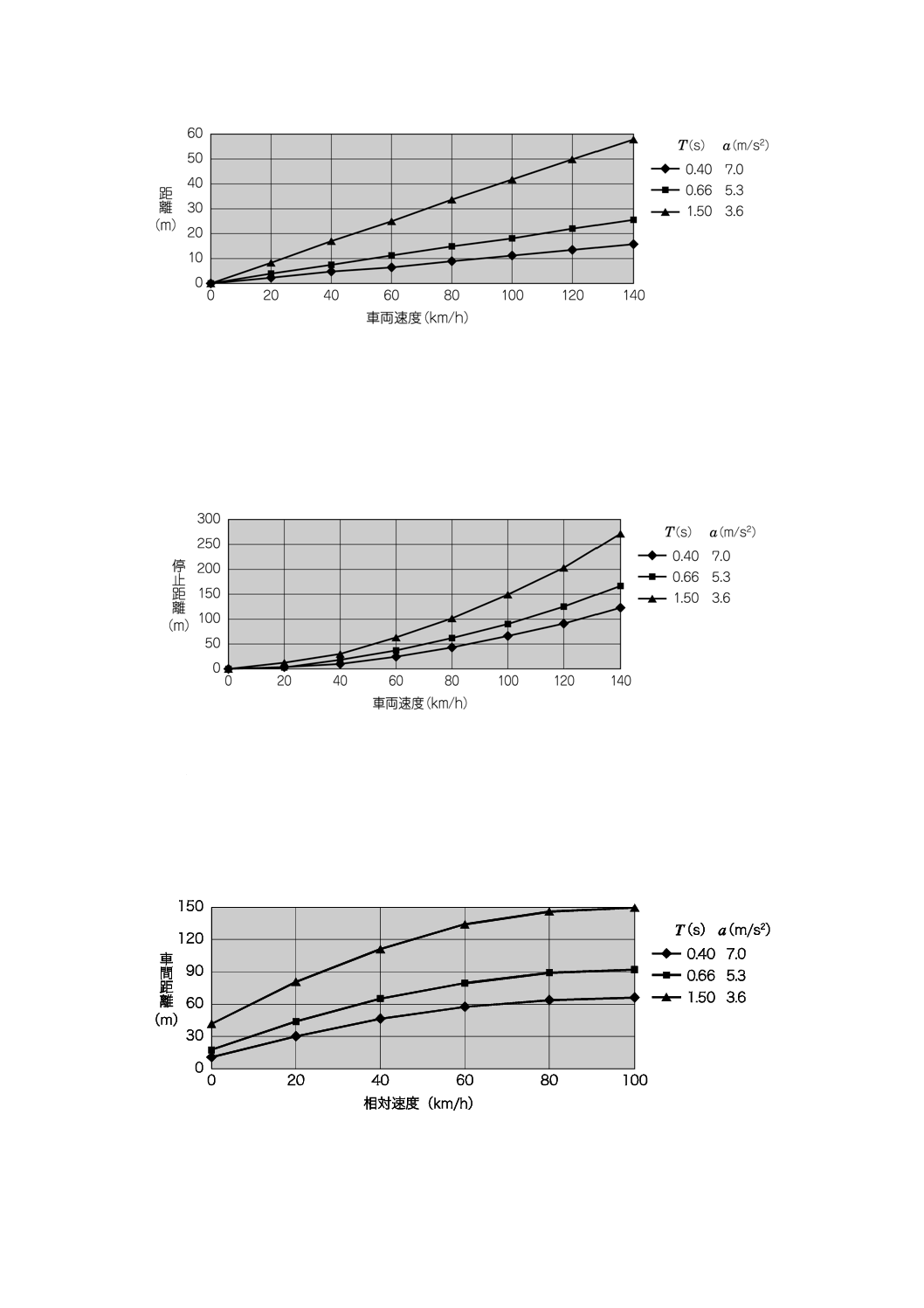
A.4 警報距離の計算事例
A.4.1 FVが通常の速度で走行している場合
SVが,FVよりも少し速い通常速度で走行しており,空走時間(運転者のブレーキ反応時間)Tが各々
1.5,0.66及び0.4秒間の場合について式(A.2)によって求めた警報距離を図A.4に示す。
19
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.4−通常速度のFVに対する,車両速度と警報距離との関係
A.4.2 FVが停止障害車両である場合
SVが,停止している障害車両に遭遇した場合について,空走時間(運転者のブレーキ反応時間)Tが各々,
1.5,0.66及び0.4秒間,減速度が3.6,5.3及び7.0 m/s2におけるSVの速度と停止距離との関係を式(A.3)
によって求めて図A.5に示す。
図A.5−停止障害車両に対する車両速度と停止距離との関係
A.4.3 FVが相対速度Vrel=(V1−V2)で減速している場合
FVがSVに対し相対速度Vrelで減速している場合について,当該車両速度100 km/h,空走時間(運転者
のブレーキ反応時間)1.5,0.66及び0.4秒間並びに減速度3.6,5.3及び7.0 m/s2における相対速度と車間
距離とを,式(A.4)によって求めて図A.6に示す。
図A.6−相対速度と車間距離との関係
20
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.5 設計パラメータ
Dmax及びd1の計算には,次の値を使用するのが望ましい。
Tmax=1.5 s
Tmin=0.4 s
amin=3.6 m/s2
21
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
曲線路上の障害車両検知
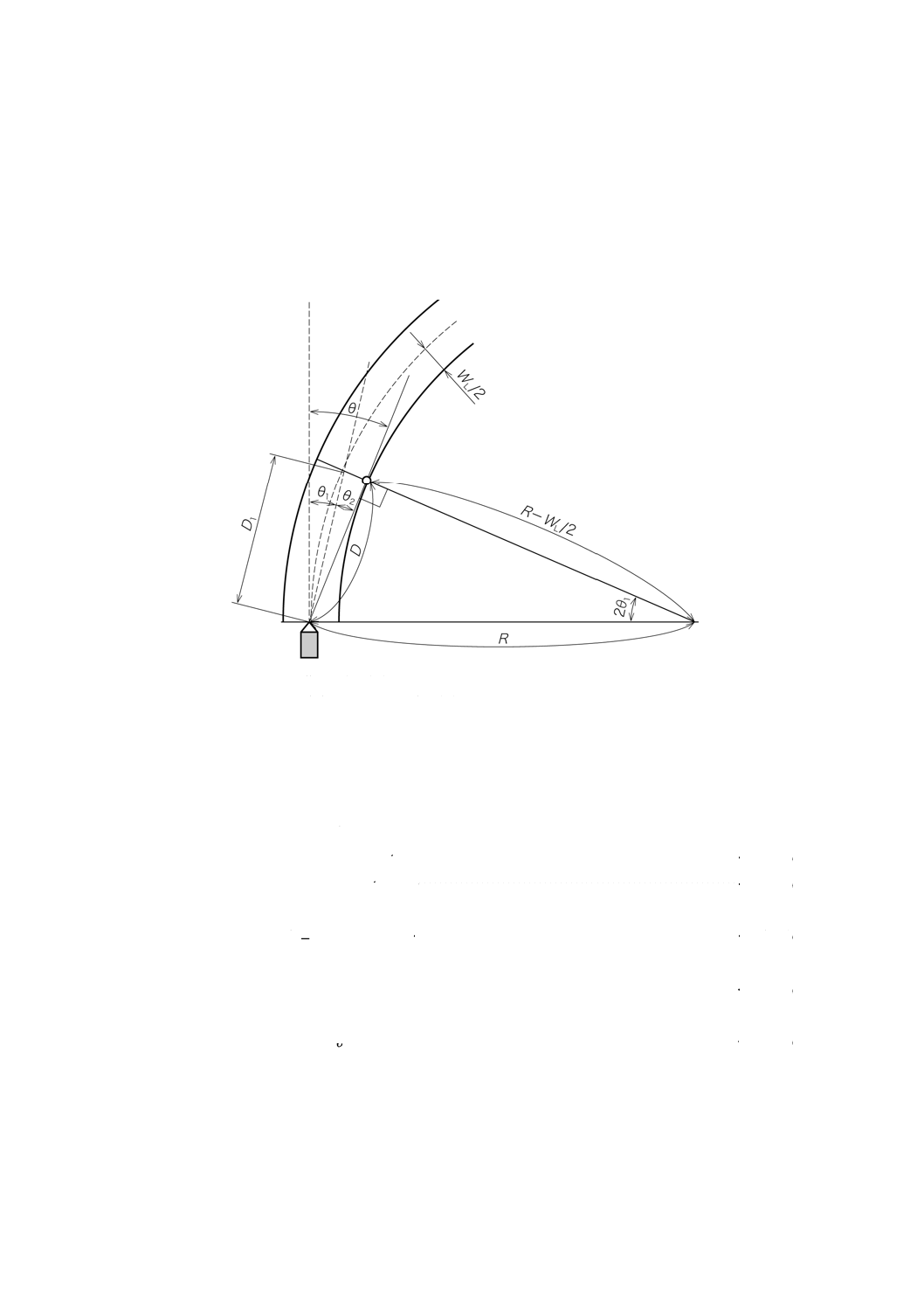
曲線路を対象とするFVCWSは,図B.1に示す障害車両検知範囲を必要とする。
凡例
R= 曲率半径(m)
D= 障害車両までの距離(m)
θ= 検知角(°)
WL= 車線幅(m)
図B.1−クラスI,クラスII及びクラスIIIシステムの検知範囲
図B.1から次の式によってDを求める。
5.0
2
L
L
)4/
(
W
W
R
D
−
×
=
····························································· (B.1)
5.0
2
L
2
1
)4/
(
W
D
D
+
=
································································· (B.2)
したがって,
)
/(
90
1
1
R
D
×
×
=
π
θ
·································································· (B.3)
図B.1から,次の式によってθ2を求める。
)
2/
(
tan
L
1
2
D
W
−
=
θ
·································································· (B.4)
最大検知角θは,次の式で求められる(表B.1参照)。
2
1θ
θ
θ
+
=
············································································· (B.5)
22
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表B.1−最大検知角θ
曲率半径(m)
100
200
300
400
500
600
700
最大検知距離D(m)
19.27
27.32
33.49
38.68
43.26
47.40
51.20
D1(m)
19.36
27.39
33.54
38.73
43.30
47.43
51.23
θ1(°)
5.55
3.92
3.20
2.78
2.48
2.27
2.10
θ2(°)
5.56
3.93
3.21
2.78
2.48
2.27
2.10
θ(°)
11.11
7.85
6.41
5.55
4.97
4.53
4.20

23
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
レーザレーダ試験目標物の反射係数
C.1 立体角(Ω)
立体角(Ω)は,球面半径の2乗と照射部分の面積との比である(図C.1参照)。
Ω=(A/dA2)×Ω0 ······································································· (C.1)
図C.1−立体角
ここに,
Ω: 立体角(sr)
A: 有効面積(m2)
dA: 光源から照射面Aまでの距離(m)
Ω0: 基準の立体角(1 sr)
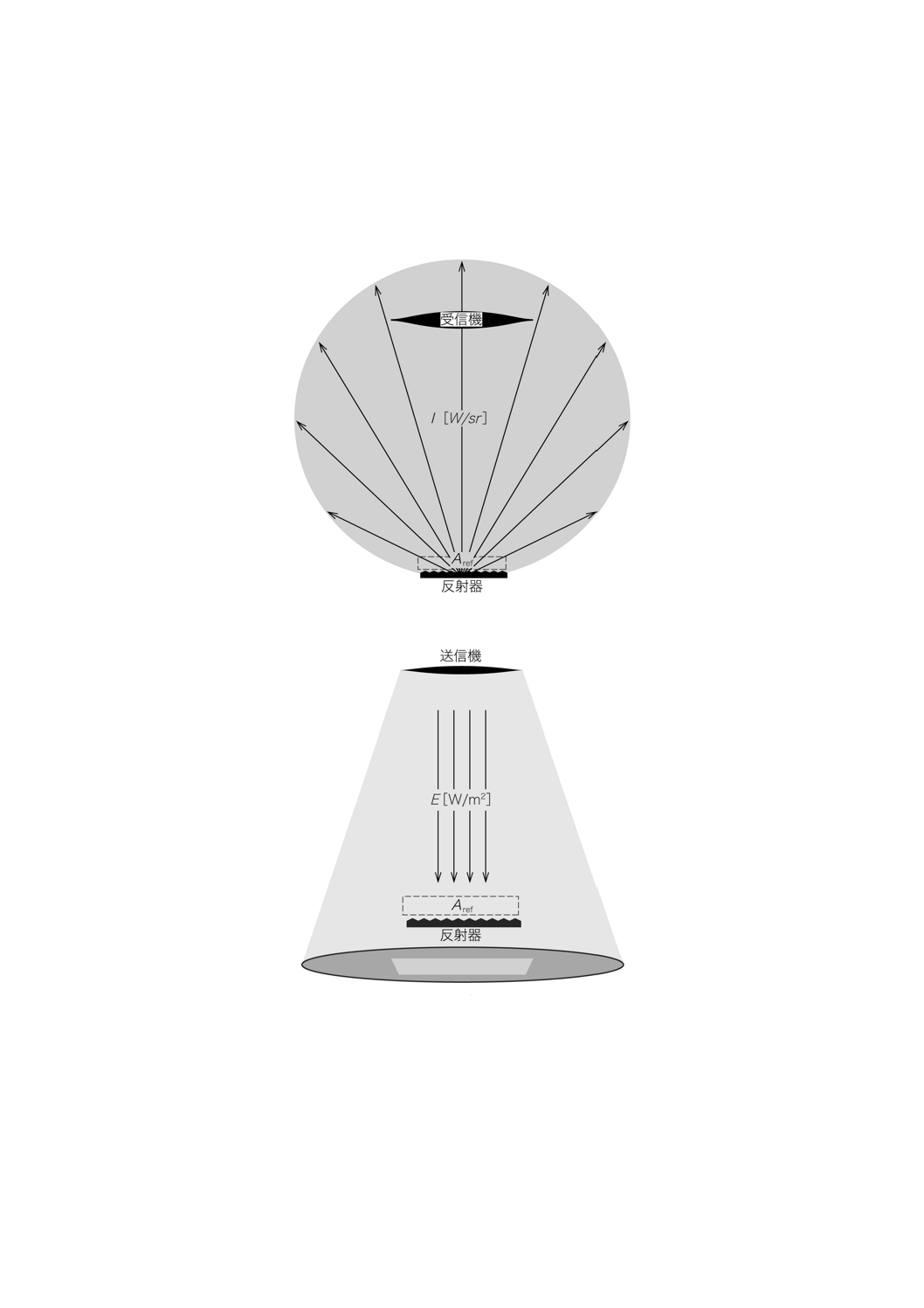
C.2 放射強度(I)
放射強度(I)は,立体角(Ω)域内の放射源からの放射束(Φ)で決まる。
Iref=dΦref/dΩ1 ········································································· (C.2)
ここに,
Iref: 受信機受光器面の直前で測定される反射器からの
反射放射強度(W/sr)
Φref: 放射束(W)
Ω1: 放射源の立体角(sr)
C.3 放射照度(E)
放射照度(E)は,照射面の面積に対する入射した放射束との比で,照射面での密度である。
Et=dΦt/dAt ············································································ (C.3)
ここに,
Et: 送信機からの放射照度(W/m2)
Φt: 放射束(W)
At: 照射面積(m2)
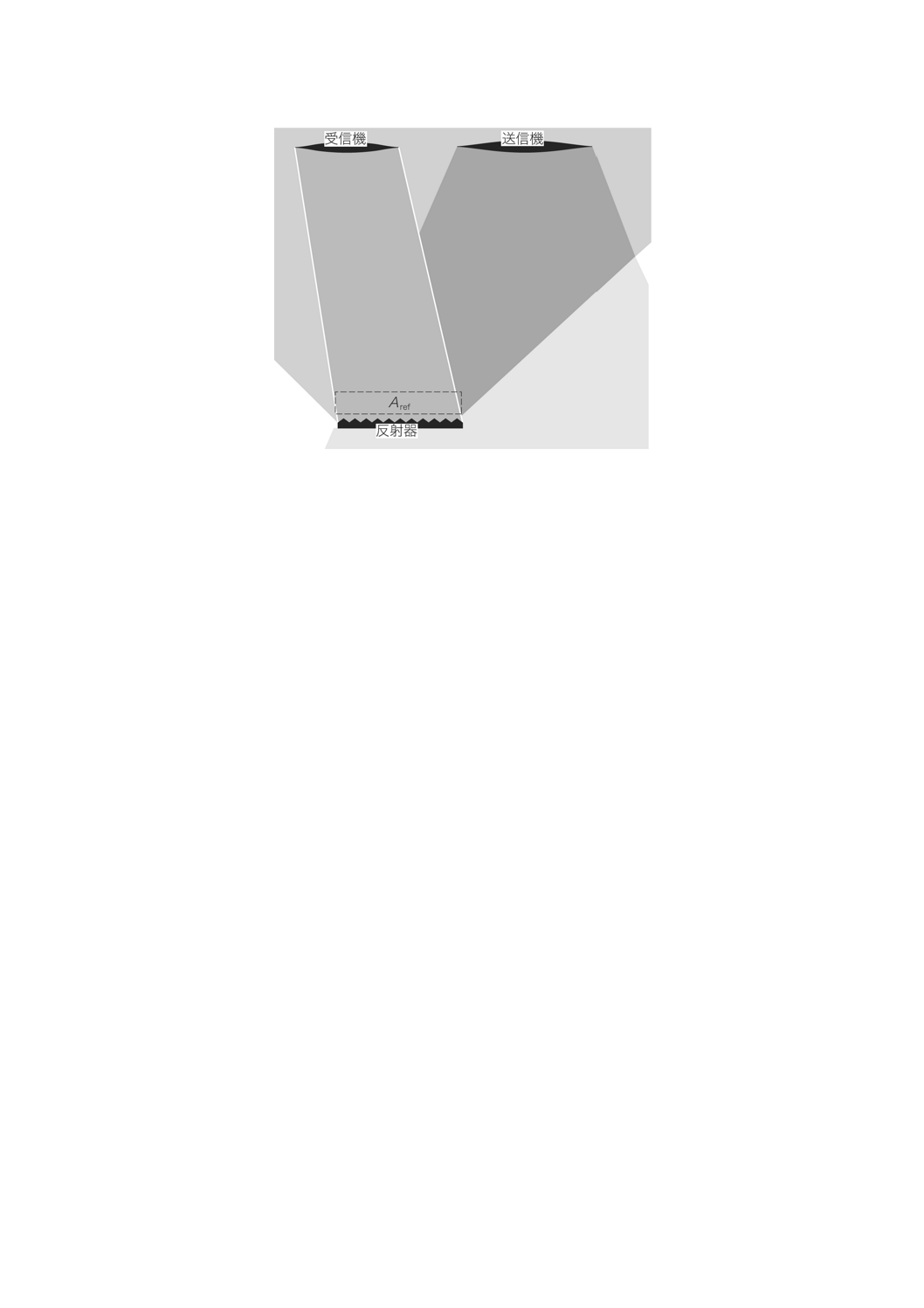
C.4 試験目標物の反射係数(RCTT)
t
ref/
RCTT
E
I
=
ここに,
Iref: 受信機受光器面の直前で測定した反射器の放射強度
(W/sr)
Et: 送信機からの放射照度(W/m2)
RCTT: 試験目標物の反射係数(m2/sr)
24
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
規定されたRCTTをもつ反射器は,8×10−3 sr以上の反射の広がり角をもたなければならない。
RCTTは,単に反射器の性能(減衰)を示す。試験方法としては,コーナ反射器(表面を“点”に縮小
する。)で十分である。反射器表面の全反射率が規定値を超えないときは,より大きな投影面積の反射器を
使用することも可能である(図C.2〜図C.4参照)。
図C.2−受信特性
図C.3−送信特性
25
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図C.4−反射器特性
26
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
電波レーダ試験目標物の形状
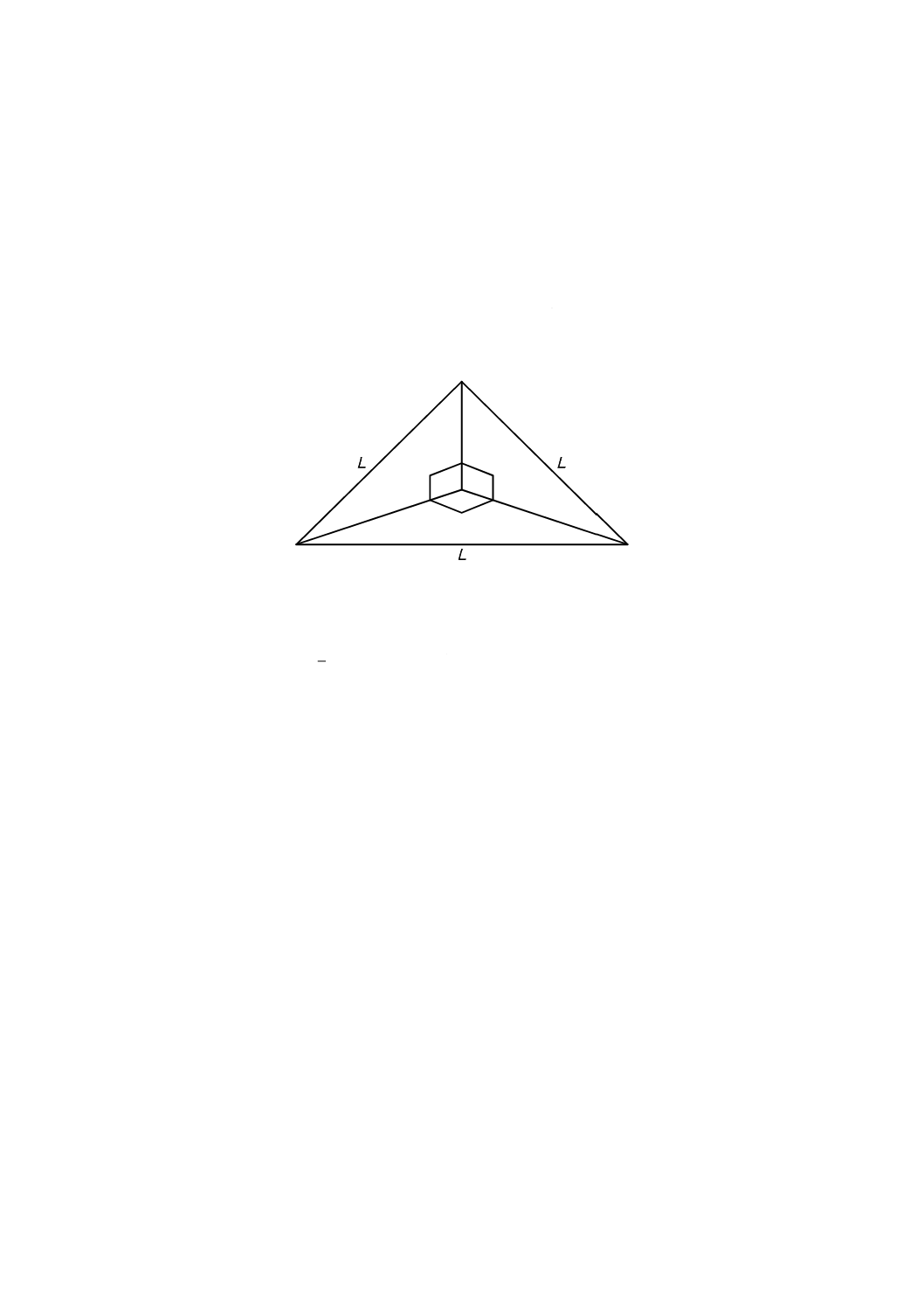
代表的な試験目標物は,コーナキューブ反射体と金属性の球体である。金属性の球体は測定の安定性で
利点があるが,形状は取扱い上難点がある。一方,コーナキューブ反射体は,コンパクトで測定点での設
置が容易であるので,標準試験目標物としてはコーナキューブ反射体が使われる可能性が大きい。試験目
標物の形状を図D.1に示す。
図D.1−試験目標物の形状(コーナキューブタイプの反射体)
RCSを計算する一般方程式は,次による。
)
3
/(
)
4(
RCS
2
4
λ
π
×
×
×
=
L
ここに,
L: 各面の長さ(m)
λ: 送信電波の中心波長(m)
27
D 0802:2015 (ISO 15623:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] Johansson G. & Rumar K. “Driverʼs Brake Reaction Times”. Hum. Factors. 1971, 13 (1) pp. 23-27
[2] ISO 22839,Intelligent transport systems−Forward vehicle collision mitigation systems−Operation,
performance, and verification requirements
[3] JIS D 0801 高度道路交通システム−アダプティブ・クルーズコントロールシステム(ACC)−性
能要求事項及び試験手順
注記 対応国際規格:ISO 15622,Transport information and control systems−Adaptive Cruise Control
Systems−Performance requirements and test procedures(IDT)
[4] ISO 22179,Intelligent transport systems−Full speed range adaptive cruise control (FSRA) systems−
Performance requirements and test procedures
[5] ISO 22178,Intelligent transport systems−Low speed following (LSF) systems−Performance requirements
and test procedures
[6] ISO 2575,Road vehicles−Symbols for controls, indicators and tell-tales
[7] ISO 6161:1981,Personal eye-protectors−Filters and eye-protectors against laser radiation
[8] ISO 15006,Road vehicles−Ergonomic aspects of transport information and control systems−Specifications
for in-vehicle auditory presentation
[9] ISO 15008,Road vehicles−Ergonomic aspects of transport information and control systems−Specifications
and test procedures for in-vehicle visual presentation