C 60068-2-6:2010 (IEC 60068-2-6:2007)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 2
3 用語及び定義 ··················································································································· 2
4 試験要求事項 ··················································································································· 4
4.1 要求特性 ······················································································································ 4
4.2 制御方法 ······················································································································ 6
4.3 取付け ························································································································· 7
5 厳しさ···························································································································· 7
5.1 振動数範囲 ··················································································································· 7
5.2 振動振幅 ······················································································································ 7
5.3 耐久試験時間 ················································································································ 8
6 前処理··························································································································· 11
7 初期測定 ························································································································ 11
8 試験······························································································································ 11
8.1 一般 ··························································································································· 11
8.2 振動応答検査 ··············································································································· 12
8.3 耐久試験 ····················································································································· 12
9 中間測定 ························································································································ 13
10 後処理 ························································································································· 13
11 最終測定 ······················································································································ 13
12 製品規格に規定する事項 ································································································· 13
13 試験報告書に記載する情報 ······························································································ 14
附属書A(参考)正弦波振動試験方法(試験記号Fc)の指針 ······················································· 16
附属書B(参考)主として部品に適用する厳しさの例 ································································· 28
附属書C(参考)主として機器に適用する厳しさの例································································· 29
C 60068-2-6:2010 (IEC 60068-2-6:2007)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,財団法人日本電子
部品信頼性センター (RCJ) 及び財団法人日本規格協会 (JSA) から,工業標準原案を具して日本工業規格
を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格
である。これによって,JIS C 60068-2-6 : 1999は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権及び出願公開後の実用新案登録出願にかかわる確認について,責
任はもたない。
JIS C 60068の規格群には,次に示す部編成がある。
JIS C 60068-1 通則
JIS C 60068-2-1 第2-1部:低温(耐寒性)試験方法(試験記号:A)
JIS C 60068-2-2 第2-2部:高温(耐熱性)試験方法(試験記号:B)
JIS C 60068-2-6 第2-6部:正弦波振動試験方法(試験記号:Fc)
JIS C 60068-2-7 加速度(定常)試験方法
JIS C 60068-2-11 塩水噴霧試験方法
JIS C 60068-2-13 減圧試験方法
JIS C 60068-2-17 封止(気密性)試験方法
JIS C 60068-2-18 第2-18部:耐水性試験及び指針
JIS C 60068-2-20 はんだ付け試験方法
JIS C 60068-2-21 第2-21部:試験−試験U:端子強度試験方法
JIS C 60068-2-27 衝撃試験方法
JIS C 60068-2-29 バンプ試験方法
JIS C 60068-2-30 温湿度サイクル(12+12時間サイクル)試験方法
JIS C 60068-2-31 面落下,角落下及び転倒(主として機器)試験方法
JIS C 60068-2-32 自然落下試験方法
JIS C 60068-2-38 温湿度組合せ(サイクル)試験方法
JIS C 60068-2-39 第2-39部:低温,減圧及び高温高湿一連複合試験
JIS C 60068-2-40 低温・減圧複合試験方法
JIS C 60068-2-41 高温・減圧複合試験方法
JIS C 60068-2-42 接点及び接続部の二酸化硫黄試験方法
JIS C 60068-2-43 接点及び接続部の硫化水素試験方法
JIS C 60068-2-45 耐溶剤性(洗浄溶剤浸せき)試験方法
JIS C 60068-2-46 接点及び接続部の硫化水素試験−指針
JIS C 60068-2-47 第2-47部:動的試験での供試品の取付方法
C 60068-2-6:2010 (IEC 60068-2-6:2007)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 60068-2-48 第2-48部:保存の影響をシミュレートするために,環境試験方法に関するJIS規格
群の試験を適用する場合の指針
JIS C 60068-2-49 接点及び接続部の二酸化硫黄試験−指針
JIS C 60068-2-50 発熱供試品及び非発熱供試品に対する低温/振動(正弦波)複合試験
JIS C 60068-2-51 発熱供試品及び非発熱供試品に対する高温/振動(正弦波)複合試験
JIS C 60068-2-52 塩水噴霧(サイクル)試験方法(塩化ナトリウム水溶液)
JIS C 60068-2-53 発熱供試品及び非発熱供試品に対する低温・高温/振動(正弦波)複合試験の指針
JIS C 60068-2-54 はんだ付け性試験方法(平衡法)
JIS C 60068-2-57 時刻歴振動試験方法
JIS C 60068-2-58 表面実装部品 (SMD) のはんだ付け性,電極の耐はんだ食われ性及びはんだ耐熱性
試験方法
JIS C 60068-2-59 サインビート振動試験方法
JIS C 60068-2-60 混合ガス流腐食試験
JIS C 60068-2-61 一連耐候性試験
JIS C 60068-2-64 広帯域ランダム振動試験方法及び指針
JIS C 60068-2-65 第2-65部:音響振動
JIS C 60068-2-66 高温高湿,定常(不飽和加圧水蒸気)
JIS C 60068-2-67 基本的に構成部品を対象とした高温高湿,定常状態の促進試験
JIS C 60068-2-68 砂じん(塵)試験
JIS C 60068-2-69 第2-69部:試験−試験Te:表面実装部品 (SMD) のはんだ付け性試験方法(平衡
法)
JIS C 60068-2-70 第2-70部:指及び手の擦れによる印字の摩滅試験
JIS C 60068-2-75 第2-75部:ハンマ試験
JIS C 60068-2-77 表面実装部品 (SMD) の本体強度及び耐衝撃性試験方法
JIS C 60068-2-78 第2-78部:高温高湿(定常)試験方法
JIS C 60068-2-80 第2-80部:混合モード振動試験方法(試験記号:Fi)
JIS C 60068-2-81 第2-81部:衝撃応答スペクトル合成による衝撃試験方法
JIS C 60068-2-82 第2-82部:試験−試験XW1:電気・電子部品のウィスカ試験方法
JIS C 60068-3-1 低温試験及び高温試験を理解するための必す(須)情報
JIS C 60068-3-2 第3-2部:温度/減圧複合試験を理解するための必す(須)情報
JIS C 60068-3-3 機器の耐震試験方法の指針
JIS C 60068-3-4 第3-4部:高温高湿試験の指針
JIS C 60068-3-5 第3-5部:温度試験槽の性能確認の指針
JIS C 60068-3-6 第3-6部:支援文書及び指針−温湿度試験槽の性能確認の指針
JIS C 60068-3-7 第3-7部:支援文書及び指針−負荷がある場合の低温試験(試験A)及び高温試験
(試験B)の試験槽の温度測定のための指針
JIS C 60068-3-8 第3-8部:振動試験方法の選択の指針
C 60068-2-6:2010 (IEC 60068-2-6:2007)
(4)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
白 紙
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 60068-2-6:2010
(IEC 60068-2-6:2007)
環境試験方法−電気・電子−第2-6部:
正弦波振動試験方法(試験記号:Fc)
Environmental testing-Part 2-6 : Tests-Test Fc : Vibration (sinusoidal)
序文
この規格は,2007年に第7版として発行されたIEC 60068-2-6を基に,技術的内容及び対応国際規格の
構成を変更することなく作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある参考事項は,対応国際規格にはない事項である。
この規格は,輸送中又は使用中に調和形の振動を受ける部品,機器及びその他の製品(以下,供試品と
いう。)に適用する試験方法を規定するものである。調和形の振動は,船舶,航空機,車両,ヘリコプター
及び宇宙機器で生じるような,又は機械及び地震現象に起因するような,主として回転力,脈動力又は周
期的な力によって発生する。
この規格では,基本的には,供試品に規定する振動数範囲又は振動数の正弦波振動を,規定する時間加
える。供試品の臨界振動数を決定するために,振動応答検査を規定してもよい。
製品規格では,振動中の供試品の動作を調べるのか,又は振動を加えた後で供試品の動作を調べるのか
を規定する。
振動試験は,常にある程度の技術的判断を必要とするものであること,及び供給者と購入者との双方で,
このことを十分に知っておくことが望ましいことをここで強調しておく。しかし,正弦波試験は,決定論
的であり,比較的簡単に実施できる。したがって,直ちに,診断及び使用寿命試験に適用できる。
この規格の本体では,アナログ又はデジタル技術を用いて,規定した点の振動を制御する方法及び試験
手順の詳細を規定する。振動運動の要求事項並びに振動数範囲,振幅及び耐久試験時間を含む厳しさの選
択についても規定し,厳しさは,パラメータの合理的な配列で表す。製品規格を定める場合は,供試品並
びにその使用条件に適合した試験手順及び値を選択することが望ましい。
1
適用範囲
この規格は,供試品が規定する厳しさの正弦波振動に耐える能力を決定するための標準的な試験手順に
ついて規定する。製品を包装しないで試験する場合は,製品そのものを供試品と呼ぶ。一方,製品を包装
した場合は,製品と包装材とを合わせたものを供試品と呼ぶ。
この試験は,供試品の機械的弱点及び/又は特定の性能の劣化を判定すること,並びに製品規格ととも
にその判定情報を用いて,供試品の合否を決定することを目的とする。この試験方法は,供試品の機械的
頑丈さを実証するため及び/又は供試品の動的な挙動を調査するためにも,使用することができる。試験
に用いた厳しさに応じて選択した場合は,部品を分類することもできる。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60068-2-6 : 2007,Environmental testing−Part 2-6 : Tests−Test Fc : Vibration (sinusoidal) (IDT)
2
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0153 機械振動・衝撃用語
注記 対応国際規格:ISO 2041,Vibration and shock−Vocabulary (MOD)
JIS C 60068-1 環境試験方法−電気・電子−通則
注記 対応国際規格:IEC 60068-1,Environmental testing−Part 1 : General and guidance (IDT)
JIS C 60068-2-47 環境試験方法−電気・電子−第2-47部:動的試験での供試品の取付方法
注記 対応国際規格:IEC 60068-2-47,Environmental testing−Part 2-47 : Test−Mounting of specimens
for vibration, impact and similar dynamic tests (IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 0153及びJIS C 60068-1によるほか,次による。
3.1
固定点 (fixing point)
通常,供試品を使用中に固定している点で,取付具又は振動台に接している供試品の部分。
注記1 実際の取付構造物の一部を取付具として使用するときは,固定点は,供試品上の点ではなく,
取付構造物上の点とする。
注記2 供試品が包装された製品の場合は,固定点は,振動台と接する供試品の表面と解釈する。
3.2
計測点 (measuring points)
試験を実施するときにデータを収集する特定の点。
注記1 計測点には,次に定義する監視点及び基準点の2種類がある。
注記2 供試品の挙動を調べるために,供試品の内部の点の測定を行うことがあるが,それらの点は,
この規格でいう計測点ではない。詳細は,A.2.1を参照する。
3.2.1
監視点 (check point)
取付具,振動台又は供試品上の点で,固定点の一つに可能な限り近く,取付具,振動台又は供試品と強
固に結合している点。
注記1 試験要求事項を満たすために,複数の監視点を使用する場合がある。
注記2 固定点が4点以下の場合は,それぞれの点の近傍を監視点として使用するのがよい。振動台
と接する包装材の表面が固定点と解釈されるような包装された製品の場合は,1点の監視点
を使用するのがよい。ただし,試験振動数範囲において,振動台又は取付構造物の共振の影
響がない場合に限る。共振の影響がある場合は,多点制御が必要となる場合がある。固定点
が4点を超える場合は,製品規格で代表的な固定点4点を監視点として規定するのがよい。
注記3 供試品が大きいか又は複雑なため,固定点に近接した点を監視点とすることができないよう
な特別の場合は,製品規格で監視点を規定するのがよい。
3
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記4 多数の小形の供試品を1個の取付具に取り付ける場合は,又は幾つかの固定点がある小形の
供試品の場合は,制御信号を取り出すために監視点を1点としてもよい(すなわち,基準点
となる)。したがって,この信号は,供試品の固定点よりも,むしろ取付具に関係しているこ
とになる。この方法は,供試品を取り付けた状態の取付具の最低共振振動数が,試験上限振
動数よりも十分高いときに限り使用できる。
3.2.2
基準点 (reference point)
監視点から選んだ点。基準点の信号を,この規格の要求事項を満たすように,試験の制御に使用する。
3.2.3
架空の基準点 (fictitious reference point)
この規格の要求事項を満たすように試験を制御するために使用する点で,複数の監視点から手動又は自
動で引き出した架空の点。
3.3
制御方法
3.3.1
1点制御 (single point control)
基準点の変換器からの信号を用いて,この点を規定の振動レベルに保つ制御方法(4.1.4.1参照)。
3.3.2
多点制御 (multipoint control)
監視点の各変換器からの信号を用いる制御方法。
注記 これらの信号は,製品規格の規定に従って,連続的に算術平均するか又は比較方法を用いて処
理する(4.1.4.1参照)。
3.4
掃引サイクル (sweep cycle)
規定振動数範囲を1回往復する動作。
例 10 Hz→150 Hz→10 Hz
3.5
シグナルトレランス (signal tolerance)
駆動振動数成分に対する,駆動振動数以外の振動数成分の比。
シグナルトレランスは,次の式で表す。
100
1×
−
=
F
NF
T
ここに,
T: シグナルトレランス(%)
NF: フィルタを通さない信号の実効値
F: フィルタを通した信号の実効値
注記 このパラメータは,試験の制御に使用する信号,すなわち,加速度,速度又は変位のいずれか
を適用する。
3.6
基本運動 (basic motion)
基準点の振動の駆動振動数の運動(4.1.1参照)。
4
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.7
実際の運動 (actual motion)
基準点の変換器からの応答で,広帯域信号によって表される運動。
3.8
減衰 (damping)
系内部の種々のエネルギー損失のメカニズムに起因する一般的用語。
注記 減衰は,実際には,構造系,振動モード,ひずみ,外力,速度,材料,接合部の滑りなどのよ
うな多くのパラメータに影響される。
3.9
臨界振動数 (critical frequencies)
次のような現象が起きる振動数。
− 振動による供試品の機能不良又は性能劣化。
− 機械共振及び/又はその他の応答の影響(例えば,チャタリングなど)。
3.10
追従共振振動数 (centered resonance frequency)
振動応答検査で得た共振振動数に,自動的に追従する振動数。
3.11
制限振動数掃引 (restricted frequency sweeping)
臨界振動数の0.8倍〜1.2倍の範囲に制限した振動数範囲の掃引。
3.12
gn
地球の重力による標準加速度。地球上の加速度は,高度及び緯度によって変化する。
注記 この規格では,gnの値を10 m/s2に丸める。
4
試験要求事項
4.1
要求特性
要求特性は,供試品を取り付けた状態の電力増幅器,振動発生機,試験取付具及び制御装置を含む試験
装置に適用する。
4.1.1
基本運動
基本運動は,時間の正弦関数で,供試品の固定点が実質的に同位相で平行な直線上を動き,4.1.2及び4.1.3
の制限内の運動でなければならない。
4.1.2
スプリアス運動
4.1.2.1
横運動
規定の軸に垂直な各軸方向の監視点の振動の最大振幅は,500 Hzまでは規定振幅の50 %以下,500 Hz
を超える振動数では規定振幅の100 %以下とする。この測定では,規定振動数範囲だけをカバーすればよ
い。例えば,小形の供試品のような特別の場合,製品規格で,横運動の許容振幅を25 %に制限してもよい。
また,大形の若しくは質量の大きな供試品又はある振動数で,前述の値を実現することが困難な場合は,
次の要求事項のいずれを適用するかを製品規格に規定する。
a) 前述の値を超える横運動に注意し,試験報告書に記録する。
b) 供試品に害を与えないことが分かっている横運動は,監視する必要がない。
5
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.1.2.2
回転運動
大形の又は質量の大きな供試品では,振動台に発生する回転運動が重要なことがある。その場合は,製
品規格に許容レベルを規定し,実際のレベルを試験報告書に記録する(A.2.4参照)。
4.1.3
シグナルトレランス
製品規格に規定がある場合は,加速度信号のシグナルトレランスの測定を実施する。この測定は,基準
点の信号に対して実施し,5 000 Hz又は駆動振動数の5倍のうち低い方の振動数をカバーする測定帯域と
する。この最高分析振動数を試験の掃引上限振動数又はそれを超える振動数まで伸ばしてもよい。ただし,
製品規格に規定がない限り,シグナルトレランスは5 %以下とする(3.5参照)。
製品規格に規定がある場合は,トラッキングフィルタを使って,制御信号の駆動振動数成分の加速度振
幅を規定の値に制御する(A.4.4参照)。
大形の又は複雑な供試品で,振動数範囲のある部分でシグナルトレランスの規定値を満足せず,トラッ
キングフィルタの使用が実際的でない場合は,駆動振動数成分に対して加速度振幅を制御する必要はない
が,シグナルトレランスを試験報告書に記録する(A.2.2参照)。
注記 トラッキングフィルタを使用しないでシグナルトレランスが5 %を超える場合は,デジタル制
御装置を使うか又はアナログ制御装置を使うかによって,再現性に重要な影響が出ることがあ
る(A.4.5参照)。
トラッキングフィルタの使用の有無にかかわらず,その影響する振動数範囲とともに,シグナルトレラ
ンスを試験報告書に記録することを製品規格に規定してもよい(A.2.2参照)。
4.1.4
振動振幅の許容差
監視点及び基準点の規定軸方向の基本運動の振幅は,次の許容差の範囲内で規定値に等しくする。これ
らの許容差には,計器誤差を含める。“測定の不確かさ”の評価に使用した信頼水準を試験報告書に記録す
ることを製品規格に規定してもよい。
低い振動数又は大形の若しくは質量の大きな供試品では,規定の許容差を実現することが困難なことが
ある。
このような場合,より広い許容差又は別の評価方法を製品規格に規定し,試験報告書に記録する。
4.1.4.1
基準点
基準点の制御信号の振幅の許容差は,±15 %とする(A.2.3参照)。
4.1.4.2
監視点
各監視点の振幅の許容差は,次による(A.2.3参照)。
500 Hz以下
±25 %
500 Hzを超え
±50 %
4.1.5
振動数の許容差
次の振動数許容差を適用する。
4.1.5.1
掃引耐久
0.25 Hz以下
±0.05 Hz
0.25 Hzを超え5 Hz以下
±20 %
5 Hzを超え50 Hz以下
±1 Hz
50 Hzを超え
±2 %
4.1.5.2
固定振動数耐久
6
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 固定振動数
±2 %
b) 略固定振動数
0.25 Hz以下
±0.05 Hz
0.25 Hzを超え5 Hz以下
±20 %
5 Hzを超え50 Hz以下
±1 Hz
50 Hzを超え
±2 %
4.1.5.3
臨界振動数の測定
耐久試験前後の臨界振動数を比較するとき,すなわち,振動応答検査には,次の許容差を適用する。
0.5 Hz以下
±0.05 Hz
0.5 Hzを超え5 Hz以下
±10 %
5 Hzを超え100 Hz以下
±0.5 Hz
100 Hzを超え
±0.5 %
4.1.6
掃引
掃引は,連続的に行い,振動数は,時間に対して指数関数的に変化させる(A.4.3参照)。掃引速度は,
毎分1オクターブとし,許容差は,±10 %とする。振動応答検査では,この値を変えてもよい(8.2参照)。
注記 デジタル制御では,厳密には“掃引は,連続的に行う”ことができない場合があるが,違いは
実際上重要ではない。
4.2
制御方法
4.2.1
1点制御及び多点制御
製品規格には,1点制御又は多点制御のいずれを使用するかを規定する。多点制御を行う場合は,監視
点の信号の平均値を規定値に制御するのか,又は選択した点(例えば,最大振幅の点)の信号の値を規定
値に制御するのかを,製品規格に規定する(A.2.3参照)。
製品規格の規定どおりに1点制御が実施できない場合には,監視点の信号の平均値又は最大値を制御す
る多点制御を使用する。いずれの場合でも,基準点は,架空の基準点となる。使用した方法を試験報告書
に記録する。
多点制御は,各監視点の信号を許容幅に収めることを保証するものではないが,1点制御と比較した場
合には,一般的に,架空の基準点の応答のばらつきを少なくできる。
多点制御は,次の方法を利用することができる。
4.2.1.1
平均値制御
この方法は,制御信号を各監視点からの信号によって計算する。監視点からの信号値の算術平均をとり,
制御信号とする。この算術平均した制御信号が,規定の振幅となるように制御する。
4.2.1.2
重み付き平均値制御
制御信号は,複数の監視点からの信号に重みを付け,算術平均によって求める(次の式を参照)。
(
)
)
w
w
w
(
w
w
w
2
1
2
2
1
1
c
n
n
na
a
a
a
+
+
+
×
+
+
×
+
×
=
ΛΛ
ここに,
ac: 制御信号
an: 監視点ごとからの信号値
wn: 監視点ごとの重み付け
n: 監視点の数
この制御方法は,異なるチェックポイント信号が,各振動数の制御値に対して異なる部分を与えること
7
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を可能にする。
4.2.1.3
極値制御
極値制御では,制御信号を,各監視点で測定した信号値の最大値又は最小値から求める。制御信号は,
各監視点からの信号値を包絡する関数又は信号値の下限値の関数として求める。
4.2.2
複数基準制御
製品規格で規定する場合は,異なる監視点又は測定点ごとに,複数の基準量を規定できる。さらに,応
力を監視する振動試験の場合は,異なる制御量について複数基準量を定義してもよい。
複数基準制御を指定する場合は,次のどちらかによって制御方法を規定する。
− 制限法:すべての制御信号が該当する基準量未満。
− 優先法:すべての制御信号が該当する基準量超過。
4.3
取付け
製品規格に規定がない限り,供試品は,JIS C 60068-2-47の要求事項に従って,試験装置に取り付ける。
通常,防振装置に取り付ける供試品の場合は,更に,8.3.2の注記,A.3.1,A.3.2及びA.5を参照する。
5
厳しさ
振動の厳しさは,三つのパラメータ,すなわち,振動数範囲,振動の振幅及び耐久試験時間(掃引サイ
クル又は時間)の組合せによって規定する。
各パラメータは,次の方法によって,製品規格に規定する。
a) 5.1〜5.3の値から選択
b) 附属書A〜附属書Cの記載例から選択
c) 既知の環境条件から適用
d) 他の既知の関連データ(例えば,JIS C 60721-3規格群)を適用
実際の環境が分かっている場合は,その環境に柔軟に対応するために,特定の振動数対加速度曲線を規
定することが適切なときがある。このような場合は,製品規格に,振動数の関数としての形状を規定する。
レベル及びそれに対応する振動数範囲,すなわち,折れ点 (break points) は,可能な場合は,製品規格に
規定する値から選択する。
部品に対する厳しさの例を附属書Bに,機器に対する例を附属書Cに,それぞれ示す(A.4.1及びA.4.2
参照)。
5.1
振動数範囲
振動数範囲をこの規格から選択する場合は,下限振動数を5.1.1から,上限振動数を5.1.2からそれぞれ
選ぶとよい。
5.1.1
下限振動数f1
0.1,1,5,10,55又は100 (Hz)
5.1.2
上限振動数f2
10,20,35,55,100,150,200,300,500,1 000,2 000又は5 000 (Hz)
振動数範囲の例を,表B.1,表C.1及び表C.2に示す。
5.2
振動振幅
振動の振幅(変位,速度,加速度又はこれらの組合せ)は,製品規格に規定する。
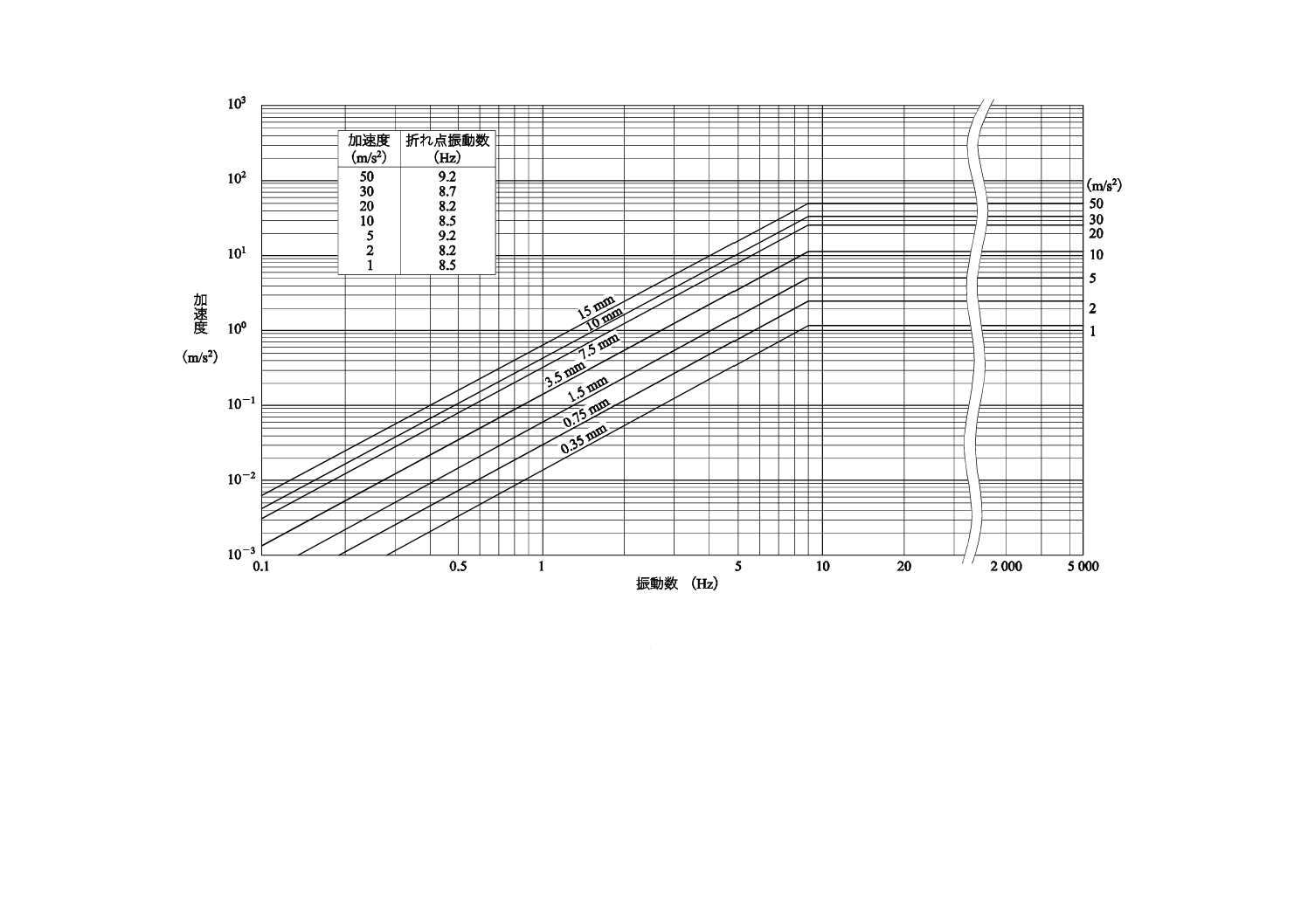
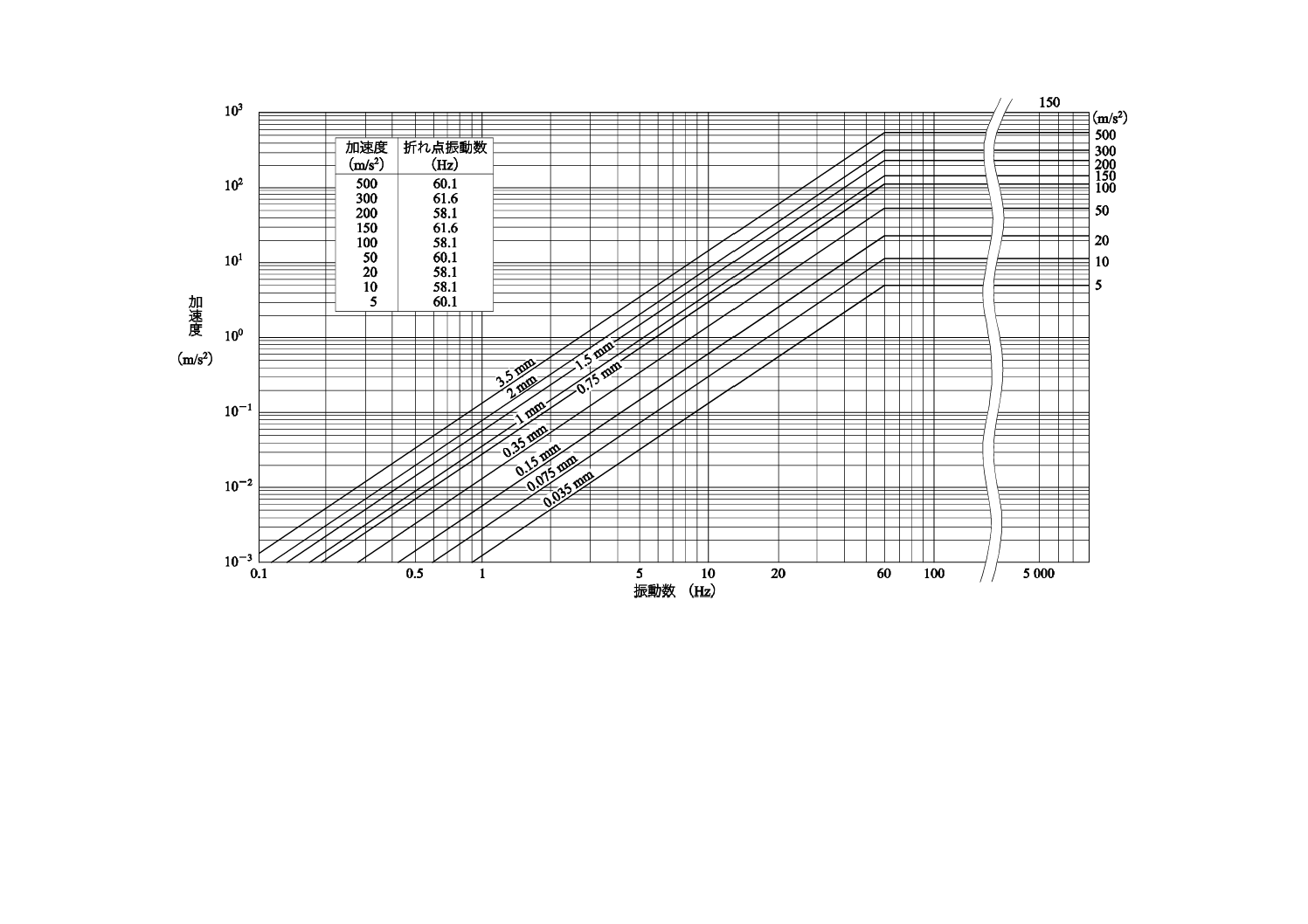
折れ点振動数未満の振動数では変位振幅一定とし,これを超える振動数では速度振幅一定又は加速度振
幅一定とする。異なる折れ点振動数の例を,図1及び図2に示す。
8
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
変位振幅の各値は,折れ点振動数で振動の強度が同じになるような加速度振幅の値に対応する(A.4.1
参照)。
注記1 この規格では,振幅は片振幅で示す。
注記2 加速度振幅,変位振幅及び振動数の間には,次の関係が成立する。
a=(2πf)2×10−3 d
ここに,
a: 加速度振幅 (m/s2)
d: 変位振幅 (mm)
f: 振動数 (Hz)
ここに規定する折れ点振動数を用いることが技術的に不適切な場合は,製品規格で異なる折れ点振動数
の変位振幅と加速度振幅とを組み合わせて規定してもよい。必要に応じて2個以上の折れ点振動数を規定
してもよい。
注記 振動数に対する振幅の計算図表を図1〜図3に示す。低い振動数範囲でこれを使用するときは,
A.4.1の指針を考慮することが望ましい。
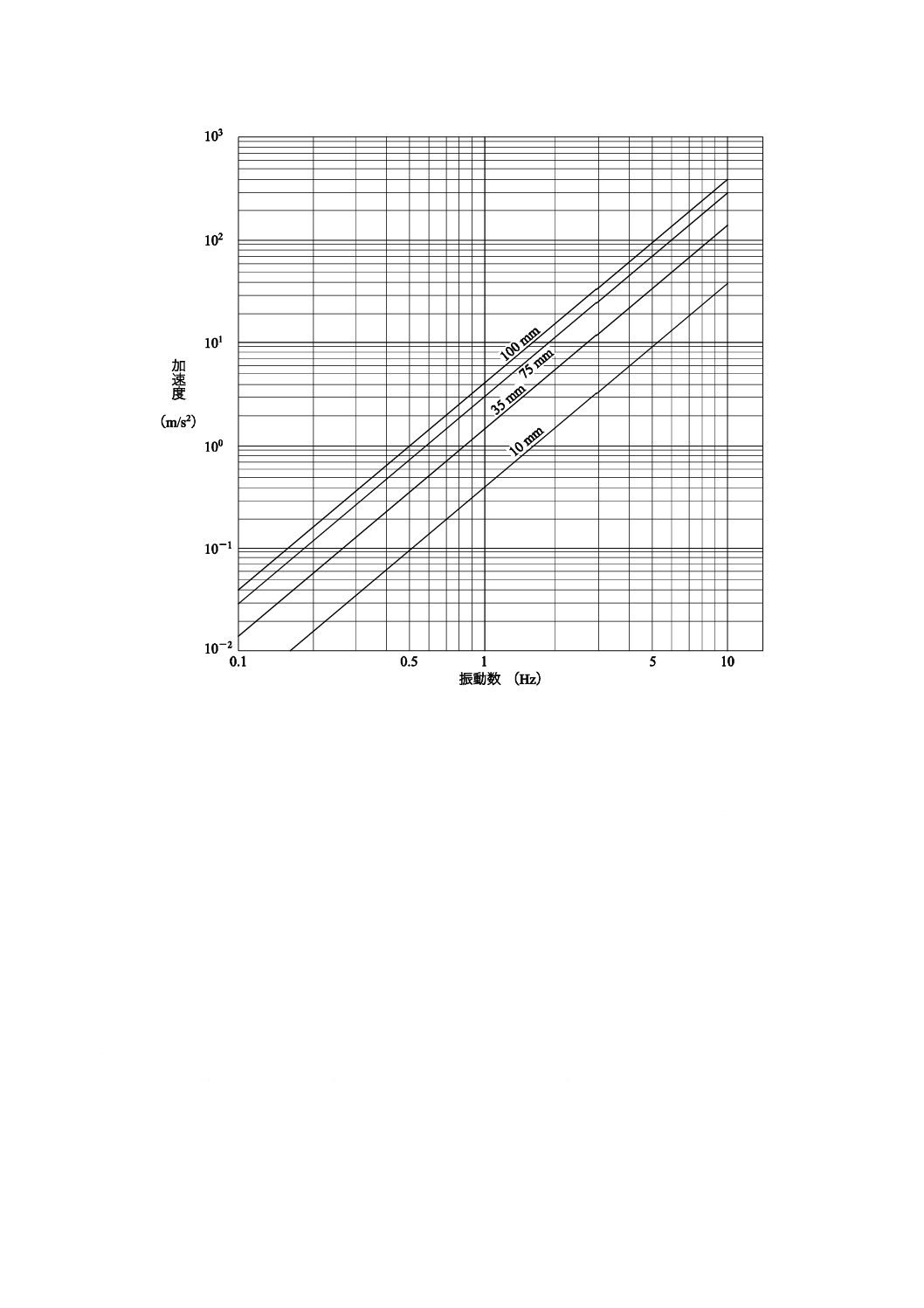
上限振動数が10 Hz以下の場合は,通常,全振動数範囲で一つの変位振幅を規定することが適切である。
したがって,図3では,変位振幅だけを規定する。
5.3
耐久試験時間
製品規格には,次に示す推奨値から選択した耐久試験時間を規定する。規定の耐久試験時間が,一軸当
たり又は一固定振動数当たり10時間以上になる場合は,この時間を,供試品に加わる応力が減らない限り
幾つかの時間に分割してもよい(A.1及びA.6.2参照)。
5.3.1
掃引耐久試験
製品規格には,各軸の耐久試験時間を,掃引サイクル(3.4参照)数で規定する。掃引サイクル数は,次
の値から選ぶとよい。
1,2,5,10,20,50又は100
これを超える掃引サイクル数を要求するときは,同じ系列の数値を適用することが望ましい(A.4.3参照)。
5.3.2
固定振動数耐久試験
5.3.2.1
臨界振動数耐久試験
製品規格には,振動応答検査(8.2参照)によって検出した臨界振動数での耐久試験時間を,各軸に規定
する。耐久試験時間は,許容差を0 %〜+5 %として次の値から選択するとよい(A.1及びA.6.2参照)。
10 min,30 min,90 min又は10 h
略固定振動数の場合は,A.1を参照する。
5.3.2.2
指定振動数耐久試験
製品規格には,供試品が使用寿命中にそのような振動を受けると考えられる総時間を考慮して,耐久試
験時間を規定する。上限値は,振動数と軸の規定の各組合せに対して107回の繰返し数とする(A.1及び
A.6.2参照)。
9
C 60068-2-6:2010 (IEC 60068-2-6:2007)
注記 このグラフは,厳しさを正確には表していない。
図1−低い折れ点振動数の場合 (8〜10 Hz) の振動数対振動振幅
3
C
6
0
0
6
8
-2
-6
:
2
0
1
0
(I
E
C
6
0
0
6
8
-2
-6
:
2
0
0
7
)
3
C
6
0
0
6
8
-2
-6
:
2
0
1
0
(I
E
C
6
0
0
6
8
-2
-6
:
2
0
0
7
)
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10
C 60068-2-6:2010 (IEC 60068-2-6:2007)
注記 このグラフは,厳しさを正確には表していない。
図2−高い折れ点振動数の場合 (58〜62 Hz) の振動数対振動振幅
3
C
6
0
0
6
8
-2
-6
:
2
0
1
0
(I
E
C
6
0
0
6
8
-2
-6
:
2
0
0
7
)
3
C
6
0
0
6
8
-2
-6
:
2
0
1
0
(I
E
C
6
0
0
6
8
-2
-6
:
2
0
0
7
)
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 このグラフは,厳しさを正確には表していない。
図3−振動対変位振幅(上限振動数10 Hzの場合だけに適用)
6
前処理
製品規格に前処理を規定してもよい。その場合は,条件を規定する(JIS C 60068-1参照)。
7
初期測定
製品規格の規定に従って,供試品の目視検査,寸法検査及び機能検査を実施する(A.9参照)。
8
試験
8.1
一般
製品規格には,供試品を振動させる軸の数及びその相対位置を規定する。製品規格に規定がない場合は,
欠陥が最も現れやすいように選んだ互いに直交する3軸方向に対して,1軸ごとに順次供試品に振動を加
える。
基準点の制御信号は,監視点の信号から取り出し,1点制御又は多点制御に用いる(A.4.5参照)。
適用する試験手順は,次に示す各試験段階から製品規格によって選択する。附属書Aにその指針を示す。
一般に,同一軸で各試験段階を順次実施し,次に他の軸で繰り返す(A.3参照)。
防振装置を付けて通常使用する供試品を,防振装置なしで試験する場合は,特別な処置が必要である(A.5
12
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参照)。同様に,通常は,包装されて輸送される供試品を,包装しないで試験する場合も特別な処置が必要
である(JIS C 60068-2-47参照)。
製品規格に,振動系に加える加振力の最大限界値によって,規定の振動振幅を補正するように制御する
規定がある場合は,これを実施する。加振力の制限方法は,製品規格に規定する(A.7参照)。
8.2
振動応答検査
製品規格に規定がある場合は,振動条件下の供試品の挙動を調べるために,規定振動数範囲の供試品の
応答を検査する。通常,振動応答検査は,耐久試験(8.3参照)と同じ条件で掃引サイクルの全範囲にわた
って実施するが,より正確な結果が得られる場合は,規定値より振動振幅を下げ,掃引速度を遅くしても
よい。供試品に対する過度の耐久時間及び過度の応力は避ける(A.3.1参照)。包装した製品を振動応答検
査する場合は,製品の振動応答を計測できない場合がある。そのような場合は,振動によって供試品に加
わる力を計測することで,包装材中の製品の固有振動数を検知できることもある。ただし,この計測方法
は,簡単ではない。適切な方法で,包装した製品の固有振動数を知る手段を確立しておく。
内容物が不明な供試品を振動応答検査する場合は,駆動力,速度など,異なる信号を計測するとよい。
製品規格に規定がある場合は,例えば,供試品の機械的インピーダンスを試験の前後に計算で求めておく
とよい。
製品規格に規定がある場合は,振動応答検査中は,供試品を動作させる。供試品を動作させたために機
械振動特性を評価できない場合は,供試品を動作させないで追加の振動応答検査を実施する。
振動応答検査中は,供試品の臨界振動数の決定に当たっては,供試品及びその振動応答データを調べる。
これらの振動数,与えた振幅及び供試品の挙動を試験報告書に記録する(A.1参照)。製品規格には,その
結果に対する処置を規定する。
デジタル制御を使用する場合,臨界振動数の決定に当たっては,掃引サイクル当たりのデータ数による
制限及び制御器の表示画面の分解能に対して,注意する(A.3.1参照)。
製品規格で,耐久試験前後の臨界振動数を比較するために,耐久試験終了後の振動応答検査の追加を要
求することがある。製品規格には,臨界振動数に変化があった場合の処置を規定する。両方の振動応答検
査は,同じ方法及び同じ振動振幅で実施する(4.1.5.3及びA.3.1参照)。
8.3
耐久試験
製品規格には,次のいずれの耐久試験を用いるかを規定する。
8.3.1
掃引耐久試験
この耐久試験が望ましい。
製品規格で選択した掃引速度,振幅及び耐久試験時間で,規定の振動数範囲を掃引する(5.3.1参照)。
必要がある場合は,供試品に加わる応力が減少しないことを条件として,振動数範囲を分割してもよい。
8.3.2
固定振動数耐久試験
次のa)又はb)の振動数を適用する。
a) 次の1)又は2)の方法を用い,8.2に規定する振動応答検査で得た臨界振動数。
1) 固定振動数
− 追従共振振動数
加える振動数は,実際の臨界振動数に常に維持する。
2) 略固定振動数
− 制限振動数掃引
実際の臨界振動数が明確でない場合は(例えば,チャタリングがある場合又は多数の供試品を同
13
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
時に試験する場合は),その現象が確実に起こるようにするために,臨界振動数の0.8倍〜1.2倍に
制限した振動数範囲を掃引すると都合がよいことがある。この方法は,共振が非線形の場合にも適
用できる(A.1参照)。
b) 製品規格に規定した指定振動数 試験は,製品規格に規定した振幅及び耐久試験時間で実施する
(A.3.2参照)。
注記 防振装置に取り付けた供試品の場合は防振装置付きの供試品の共振振動数を,又は包装した
供試品の場合には包装材内の供試品の共振振動数を,この耐久試験の振動数として選択する
かどうかを製品規格に規定することが望ましい(A.5参照)。
9
中間測定
製品規格に規定がある場合は,試験中の供試品を動作させ,試験の全時間に対する規定の割合の時間の
間,その性能を確認する(A.3.2及びA.8参照)。
10 後処理
製品規格に規定がある場合は,供試品の条件,例えば,温度のような条件を,初期測定のときと同じに
するために,試験後と最終測定との間に,一定の時間が必要な場合がある。製品規格に,後処理の詳細の
条件を規定する。
11 最終測定
製品規格の規定に従って,供試品の目視検査,寸法検査及び機能検査を実施する。
製品規格に,供試品の合否判定基準を規定する(A.9参照)。
12 製品規格に規定する事項
この試験が製品規格に規定されている場合は,適用可能な限り,次の事項を規定する。
なお,特にアスタリスク(*)付きの事項は,必す(須)である。
a) 監視点の選択
3.2.1
b) 制御点の選択*
3.3
c) 横運動
4.1.2.1
d) 回転運動
4.1.2.2
e) シグナルトレランス
4.1.3
f)
振動振幅の許容差
4.1.4
g) 信頼水準
4.1.4
h) 1点又は多点制御*
4.1.4.1
i)
取付け
4.3
j)
厳しさ,実際の環境(既知の場合)
箇条5
k) 振動数範囲*
5.1
l)
振動振幅*
5.2
m) 特定の折れ点振動数
5.2
n) 耐久試験時間*
5.3及び8.3
o) 前処理
箇条6
14
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
p) 初期測定*
箇条7
q) 試験軸*
箇条8
r) 加振力の制限
箇条8
s)
実施する試験段階及び順序*
箇条8,8.2及び8.3
t)
供試品動作及び機能検査*
8.2及び箇条9
u) 振動応答検査後にとるべき処置*
8.2
v) 最終振動応答検査で応答振動数の変化を発見したときにとるべき処置*
8.2
w) 指定振動数
8.3.2
x) 防振装置付の供試品の共振振動数における試験
8.3.2
y) 後処理
箇条10
z) 最終測定*
箇条11
aa) 合否判定基準*
箇条11
13 試験報告書に記載する情報
試験報告書には,少なくとも,次の事項を記載する。
a) 顧客
(名称及び所在地)
b) 試験所
(名称及び所在地)
c) 試験報告書の識別
(発行日及び識別番号)
d) 試験日
e) 試験の種類
正弦波(試験記号:Fc)
f)
試験の目的
(開発試験,認定試験など)
g) 試験規格及び/又は試験手順並びに発行年(又は版) (関連試験手順)
h) 供試品の記述
(識別番号,図面,写真,数量など)
i)
供試品の取付け
(取付具の識別,図面,写真など)
j)
試験装置の性能
(横運動など)
k) 測定系及びセンサの位置
(概要,図面,写真など)
l)
測定系に用いたフィルタ
(種類及び帯域幅)
m) 測定系の不確かさ
(校正データ並びに前回及び次回の校正日)
n) 制御方法
(1点制御,多点制御又は複数基準制御)
o) 初期,中間又は最終測定
p) 要求する厳しさ
(試験仕様から)
q) 実施した試験の厳しさ
(振動数範囲,振動振幅,試験時間など)
r) 試験結果
(供試品の状態に関するコメント)
s)
試験中の観察事項及び行った処置
t)
試験の要約
u) 試験管理者
(氏名及び署名)
v) 配付先
(報告書の受領者リスト)
注記1 試験を文書に記録する場合,例えば,試験パラメータを併記した時系列の試験実施リスト,
試験中の観察事項及び実施処置並びに測定のデータシートは,試験について試験実施記録
を作成することが望ましい。この試験実施記録を,試験報告書に添付してもよい。
15
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記2 JIS Q 17025の5.10(結果の報告)を参照。
16
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
正弦波振動試験方法(試験記号Fc)の指針
A.1 はじめに
この附属書は,実際に受けることが予測される影響と同様な影響を試験室で再現する方法を記載したも
のである。実際の環境を再現することを意図したものではない。
異なる場所で,異なった人々によって,アナログ又はデジタル制御技術のいずれを用いても,同じ結果
が得られるように,パラメータを標準化し,適切な許容差を設定した。パラメータを標準化したので,部
品をこの規格の振動の厳しさに耐える能力に応じて分類することもできる。
従来の振動試験では,共振点を探査し,次に供試品に規定の時間その共振振動数の振動を加える耐久試
験を行っていた。共振点探査を長時間実施したとしても,使用中に故障を生じやすい共振とそうでない共
振との差異を一般的に定義することは難しい。
さらに,このような試験手順を,最近の多くの供試品に適用することは非現実的である。直接観察によ
って,密閉された製品又は小形化した製品の振動特性を評価することは,ほとんど不可能である。製品の
質量ばね分布を変えないで,振動ピックアップを取り付けることが不可能なことがある。ピックアップを
取り付けることができた場合は,製品に対する適切な点の選択は,完全に試験技術者の熟練及び経験に依
存することになる。
この規格で推奨する掃引耐久試験では,このような困難を最小限にし,損傷を与えやすい共振か否かの
判定を避けることができる。この規格で推奨する方法は,現在の環境試験技術で可能であること及び試験
技術者の熟練に対する依存度を最小限にすることを考慮して規定した。掃引耐久時間は,応力繰返し数及
び関連する掃引サイクル数で規定する。
しかし,この試験手順では,要求使用時間と同等の疲労寿命又は使用中と同等な振動条件での無限の疲
労寿命を保証するために耐久試験を行う場合は,非常に長い耐久試験時間が必要となることがある。した
がって,そのために別の試験方法,すなわち,あらかじめ規定した振動数又は振動応答検査によって得ら
れた振動数で行う固定振動数耐久試験を規定した。振動応答検査によって,そのような振動数が各軸当た
り4点以下であることが分かった場合は,固定振動数耐久試験を適用することが望ましい。5点以上の場
合は,掃引耐久試験の方が適切なことがある。
略固定振動数の場合の耐久試験時間は,臨界振動数耐久試験の規定によって選択し,その値に供試品の
臨界振動数の範囲に応じた一定の割合を加えることが望ましい(5.3.2.1参照)。
掃引耐久試験及び固定振動数耐久試験の両方を実施することが適切な場合もある。固定振動数耐久試験
は,その適用に当たって,なお,ある程度の技術的判断を必要とすることを認識しておく必要がある。
さらに,あらかじめ規定した振動数での耐久試験の場合は,耐久試験時間を製品規格で規定する必要が
ある。
臨界振動数での固定振動数耐久試験時間は,時間で規定する。この時間は,予想される応力繰返し数を
基準とすることが多い。種々の異なった材料が使用されているので,応力繰返し数に単一の数字を当てる
ことは現実的でないことは明らかである。しかし,一般の振動試験には107回が実用上十分な上限値であ
り,これを超える必要はないと考えられる(5.3.2.1及び5.3.2.2参照)。
ランダム又は複雑な成分の背景振動のレベルが高い場合は,正弦波試験は適切でないことがある。その
17
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ような場合,特定の用途に対して正弦波試験だけでよいかどうかは,使用者の判断による。
実際の環境が本質的にランダム振動であることが分かっている場合は,経済的に可能な限り,耐久試験
は,ランダム振動で行うことが望ましい。ランダム振動は,特に機器の場合に適している。構造が簡単な
部品のような場合は,通常,正弦波試験が適切である。ランダム試験は,JIS C 60068-2-64に規定する。
A.2 計測及び制御
A.2.1 計測点
主な2種類の計測点を箇条3で定義した。しかし,供試品内部の振動が損傷の原因とならないことを確
認するために,供試品内部の局部的応答を計測する必要がある場合がある。設計段階などの場合は,高価
な供試品の劣化を防ぐために,そのような計測点からの信号を制御ループへ接続する必要がある場合すら
ある。しかし,この方法は標準化することができないので,この規格では推奨しない(3.2参照)。
A.2.2 シグナルトレランスによる誤差
シグナルトレランスが5 %未満の場合は,実際の振動と基本運動との間に実用上の差はない。
大きな振動台で,小形又は質量の小さな供試品を試験する場合は,一般に,シグナルトレランスに関し
て問題はない。振動試験装置を新規に設置したときに,装置のシグナルトレランスを測定する場合は,そ
の測定値を適用すると仮定してもよい。しかし,大形の供試品の場合に発生する可能性がある問題につい
て注意する必要がある。
シグナルトレランスが大きい場合は,計測系が示す振動レベルには,必要な振動数成分と多くの不必要
な振動数成分とが含まれているので,その振動レベルは正しくない。この場合には,規定した振動数成分
の振幅は,規定値より低くなる。シグナルトレランスが4.1.3の規定値以下の場合は,この誤差は許容で
きるが,この値を超える場合は,基本振動数成分のレベルを規定の振幅に修正する必要がある場合もある。
これを実施する方法は幾つかあるが,トラッキングフィルタを使用する方法がよい。基本振動数成分のレ
ベルを修正した場合には,供試品は,規定の振動数成分の意図した応力を受けることになる。
そのことによって,不必要な振動数成分も増加し,その結果として応力も追加することになる。したが
って,非現実的な高い応力が発生する場合は,製品規格に規定したシグナルトレランスの要求事項を放棄
するほうが適切な場合がある(4.1.3参照)。
デジタル制御装置では,信号をスペクトル分析することによって,フィルタを通さない広帯域制御信号
に関する別の情報を得ることができる。すなわち,規定振動数範囲について分析した場合は,基本振動数
成分,高調波並びに例えば,チャタリング及び衝突などによる他の雑音成分を調べることができる。
注記 ひずみとシグナルトレランスとの関係を,次の式に示す。
100
2
100
100
2
T
T
D
×
+
=
ここに,
D: ひずみ(%)
T: シグナルトレランス(%)
上の式から,シグナルトレランスが5 %のとき,ひずみは32 %となる。
A.2.3 制御信号の取り出し
制御信号の取り出しには多くの方法がある。
多点平均値制御,すなわち,算術平均した信号を制御信号とすることを規定している場合は,各監視点
のピーク加速度レベルに比例する直流電圧を処理することによって,平均値信号を得ることも一つの方法
である。
18
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
各監視点を周期的に問い合わせるために,時分割多重化[IEC 60050(721)の721-04-11参照]を使う場合
は,各信号の1周期以上を確保するために,問い合わせ周波数は,駆動振動数を超えないことが望ましい。
例えば,4個のピックアップを使用する場合は,100 Hzでは,各監視点を問い合わせる周期は,0.01秒以
上が望ましい。しかし,このような装置を1台のトラッキングフィルタとともに用いるときは,問題を発
生することがあるため注意する必要がある。
注記 このようなサンプリング(時分割多重化)装置を使った場合は,サンプリング装置への入力信
号間の位相差のために,出力信号にはひずみが発生する。このひずみをもつ信号をトラッキン
グフィルタに入力すると,トラッキングフィルタの出力信号の振幅は,トラッキングフィルタ
への入力信号に比例しないため,制御誤差が発生するという問題が起こる。
データサンプリング装置は,定変位振幅制御で試験を行う場合には,データサンプリング装置への入力
信号間の位相差のために,出力信号にはひずみが発生する。このひずみをもつ信号を2回積分した信号の
振幅は,変位振幅に比例しないため,問題を起こすことがある。
規定した許容差内で試験が実施できるようにするために,振動試験装置全体の残留雑音レベルを低くす
ることが必要である(4.1.4.1参照)。振動試験装置の残留加速度の許容できるしきい値は,0.6 m/s2程度で
ある。
A.2.4 回転運動(4.1.2.2参照)
大形の又は質量の大きい供試品は,振動台の加振軸に対する剛体の慣性力の偏心,又は固有振動数に対
応する振動モードの形に関係する慣性力の分布による転倒モーメントを発生することがある。この転倒モ
ーメントは,基本運動の方向に垂直な平面内の軸の周りの回転運動を発生し,供試品に応力を追加する。
この応力が,非現実的な高い値になることがある。したがって,回転運動を減少させるか,又は少なくと
もその大きさを知るとよいことがある。試験を行う前には,通常,供試品の固有振動数及び振動モードの
形は分からないため,これらの問題に対して一般的な仮説を立てることは困難である。
供試品の質量をm,取付具を含む振動発生機の可動部質量をmt,供試品の重心と振動台の中心との距離
をd,水平加振の場合の振動台の加振軸に対する供試品の重心の高さをhとすると,有用な近似の基準を
得ることができる。
剛体と仮定した供試品の場合,予測される最大の転倒モーメントMoは,加振したときの最大加速度がA
のとき,次の式で算出できる。
− 偏心剛体の場合
Mo=m×d×A
− 重心の高い剛体の水平加振の場合
Mo=m×h×A
規定振動数範囲内に供試品の共振がある場合は,共振部の質量をmとし,予測される応答加速度の最大
値をAとした場合は,同じ式が使える。前記の式では,整合した単位を使うことが重要である。
動電式及び油圧式振動試験装置には,最大転倒モーメントの限界がある。振動発生機が1台の装置では,
いずれの場合も,最大許容転倒モーメントがあり,通常は,振動発生機の損傷を防ぐために,装置の製造
業者がその値を示す。
複数の振動発生機を用いる装置では,転倒モーメントを打ち消す振動台の能力の最大値があり,この値
を超えるとき,振動台に回転運動(ピッチ又はロール)が発生する。
次の基準が適用できる。
mtに対するmの比が0.2未満の場合は,監視する必要はない。0.2以上の場合は,次の監視が適切な場
19
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
合がある。
振動発生機が1台の装置(水平振動台が付いている場合又は付いていない場合)及び機械的ガイド装置
では,転倒モーメントは弾性体又は軸受によって支えられる。したがって,供試品の転倒モーメントが,
試験装置の最大許容転倒モーメントの50 %を超えるときだけ,回転運動を測定する必要がある。
複数の振動発生機を用いる場合及び多自由度の試験装置の場合は,転倒モーメントは制御装置によって
制御される振動発生機で打ち消される。したがって,供試品の転倒モーメントが,試験装置の最大許容モ
ーメントを超えるときだけ,回転運動を測定する必要がある。
A.3 試験手順
A.3.1 振動応答検査(8.2参照)
供試品が船舶,航空機及び回転機械に見られるような周期性の顕著な振動を受けることが分かっている
場合には,振動応答検査は幾つかの目的に対して有効である。供試品の動的な挙動を調査し,疲労を評価
することが重要であると考えられるときにも振動応答検査は有効である。
振動応答検査に適用する振幅は,供試品の機能不良及びチャタリングが試験レベルだけで起きることが
あるので,供試品の動的な挙動の直線性に十分注意することが望ましい。
耐久試験の前及び後で実施する振動応答検査は,共振振動数の変化又は他の応答が発生する振動数の変
化を確認するために用いることができる。振動数の変化の原因が疲労又はその他の劣化の発生であること
があり,このような場合,その使用環境又は輸送環境に供試品が適合するかを評価することが望ましい。
製品規格に振動応答検査を規定する場合は,例えば,次のような事項について試験中及び試験後にどの
ように処置するかについて明確にしておくことが望ましい。
− その値を超えた場合,掃引耐久試験を要求する動的倍率の特定の値
− 振動数の変化
− 許容できない応答レベル
− 電気雑音
振動応答検査中は,供試品が受ける影響を検出するいかなる手段も,供試品全体の動的挙動を変化しな
いようにすることが必要である。非線形共振の場合,供試品は振動数掃引の向きによって異なった応答を
することがあるため,注意する必要がある。掃引の上昇時には,供試品は構造的に安定していることがあ
るため,臨界振動数は掃引の上昇及び下降時に決定することが望ましい。
ばねの軟化又は硬化の非線形が現れる疑いがある場合は,掃引の開始点をf1の代わりにf2にしてもよい。
臨界振動数の決定は,掃引の上昇と下降とで異なることがある。
デジタル制御を使う場合は,供試品の各共振のピーク及び各臨界振動数を適切にとらえることができる
ように,f1とf2との間の十分なデータポイント数を選択することが重要である。特に,低い減衰比の供試
品の低い振動数範囲の場合は,不十分なデータポイント数では,臨界振動数の決定が不正確になることが
ある。通常,該当する共振の−3 dB帯域幅内に3(可能なら5)以上のデータポイントがある場合は,十
分であると考えられる。十分なデータが得られず,共振の存在を示す証拠がある場合は,振動応答検査を
やり直す必要がある。そのような場合は,制限した振動数範囲の掃引が必要なことがある。
制御装置によっては,すべてのデータを正確に表示する能力に限界があることがあるため,臨界振動数
の決定に関して,グラフ表示方法の選択に起因する誤差が発生することがある。したがって,この問題を
解決するためには,各臨界振動数付近のグラフの拡大表示が必要なことがある。
製品規格に振動応答検査の規定がある場合は,実際に使用する防振装置が利用できるかどうかが重要で
20
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ある。防振装置が利用できるときは,最初の検査では,供試品の臨界振動数を決定するために,防振装置
を外すか,又は動かないようにして実施することが多い。
次の段階では,防振装置の影響を調べるために,防振装置を取り付けて動くようにして,応答検査を実
施してもよい。
最初の検査では,防振装置がないか又は動かないようにしているため,防振装置の伝達特性を図A.1か
ら求め,それらを考慮した異なる振動振幅を適用する必要がある。
防振装置が利用できない場合は,A.5.1を参照する。
A.3.2 耐久試験(8.3参照)
掃引耐久試験は,一般に,供試品が使用中に受ける応力の影響をシミュレートする最も適切な方法であ
る(8.3.1参照)。
固定振動数耐久試験は,使用環境が限られた供試品,すなわち,特定の機械の影響を受ける場所又は限
定した機種の車両若しくは航空機に取り付ける供試品の場合に適切である。これらの場合は,卓越振動数
は,通常既知であるか又は予測可能である。この方法は,例えば,自動車による輸送中の励振が引き起こ
す疲労の影響を実証するために,短時間で繰返し応力を累積させる場合にも適切なことがある(8.3.2参照)。
注記 卓越振動数とは,パワースペクトルにおいて最大値を示す振動数をいう(JIS B 0153参照)。
供試品が振動に耐え得る能力を確認することと同様に,幾つかの振動数で起こり得る疲労の状況を考察
することが必要な場合がある。この場合には,掃引耐久試験に引き続いて固定振動数耐久試験を実施する
ことが適切である。これによって,最短時間で必要な情報が得られる。
小形の供試品の場合は,55 Hz又は100 Hz未満に共振が存在しないことが確実なとき,これらの振動数
を下限振動数として耐久試験を行ってもよい。
通常防振装置に取り付ける機器の耐久試験では,一般に防振装置を付けて試験を実施する。適切な防振
装置を付けて試験を実施することができない場合は,例えば,その機器が別の機器とともに共通の取付け
装置に取り付く場合には,その機器は,防振装置なしで,製品規格の規定に従って別の厳しさで試験を行
ってもよい。この場合の振幅は,防振装置の各試験軸に対する伝達率を考慮して決定することが望ましい。
防振装置の特性が不明の場合は,A.5.1を参照する。
供試品が,許容できる最低限の構造的強度を実証するために,製品規格に,外付けの防振装置を取り外
して,又は動かないようにして実施する追加試験を規定してもよい。この場合,加える厳しさは,製品規
格に規定することが望ましい。
輸送環境の再現試験において,通常,包装して試験をする製品であるが,都合によって包装材が使用で
きない場合がある。このような場合は,JIS C 60068-2-47を参照する。
A.4 試験の厳しさ
A.4.1 試験の厳しさの選択
この規格に規定した振動数及び振幅は,広い適用範囲の振動数応答を包絡するように選択したものであ
る。機器を単一の用途だけに使用する場合は,実際の環境の振動特性が分かっているときは,その厳しさ
を基にすることが望ましい。機器に関する実際の環境の振動条件が分かっていない場合は,種々の適用に
関する試験の厳しさの例を示す附属書Cから適切な厳しさを選択することが望ましい。
試験の厳しさの選択に当たって,JIS C 60721-3規格群の情報を考慮することが望ましい(箇条5参照)。
変位振幅の値は,折れ点振動数での振動の強度が同じになるような加速度振幅の値に相当しているので,
折れ点振動数で変位一定から加速度一定に,又はその逆に切り換えて振動数を連続的に掃引することがで
21
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
きる。この規格では,8〜10 Hz及び58〜62 Hzの折れ点振動数を規定した。
実際の環境が既知であってその環境をシミュレートすることが望ましい場合は,この標準以外の折れ点
振動数が必要となる。その結果,高い折れ点振動数が必要となる場合は,振動発生機の能力に注意を払う。
選択した変位振幅が低い振動数領域で,振動試験装置の残留雑音レベルに等しい加速度振幅に相当するこ
とを避ける必要がある。この問題は,トラッキングフィルタを使用するか,又は試験振動数範囲が低い場
合は,制御ループ内に変位変換器を採用することによって解決できる(5.2参照)。
A.4.2 部品に適用する試験の厳しさの選択
部品に適用する試験の厳しさの選択は,部品を組み込む機器又は部品が受ける応答が未知のことが多い
ため,複雑である。部品が特定の機器に使われることが分かっているときでも,部品が受ける振動環境は,
構造体,機器,組立品などの動的応力のため,機器が受ける環境とは異なることがある。したがって,機
器の厳しさに関連づけて部品の厳しさを選択する場合は,注意が必要であり,その動的応答の影響を考慮
した余裕が必要なことがある。
防振設計された方法で機器に部品を取り付ける場合は,機器の厳しさ又はそれより低い厳しさが適して
いることがある。
部品の試験の厳しさを選択する代替方法として,機器の設計者が機器の使用目的に適した部品を選択で
きるように規定された厳しさでの部品の試験及び格付けがある。
部品に適用する厳しさの例を,附属書Bに示す。
A.4.3 掃引
掃引中,振動数は,次の式に従って指数関数的に変化する必要がある。
kt
e
f
f=
1
ここに,
f: 振動数
f1: 掃引下限振動数
k: 掃引速度に関する係数
t: 時間
この規格では,掃引速度は毎分1オクターブであるから(4.1.6参照),時間を分で表すと,掃引速度に
関する係数は,次の式のようになる。
k=loge 2=0.693
掃引1サイクル当たりのオクターブ数は,次の式のように表される。
=
=
=
1
2
10
1
2
10
10
1
2
2
log
644
.6
log
2
log
2
log
2
f
f
f
f
f
f
X
ここに,
X: オクターブ数
f1: 掃引下限振動数
f2: 掃引上限振動数
上の式を用いて求めた耐久試験時間を,表A.1に示す。ただし,この表では,推奨する掃引サイクル数
と振動数範囲とに対応する耐久試験時間は,丸めた数値で示す(5.3.1参照)。
デジタル制御装置では,外部のアナログシンセサイザから,又はデジタルデータから内部的に,正弦波
信号を発生させることができる。
前者の場合,純粋な連続正弦波が得られるので,アナログ制御装置との違いはない。
後者の場合,D/A変換器から出力されるアナログ出力は滑らかではなく,細かな階段状の信号となって
いる。この信号を滑らかにし,純粋な正弦波信号にするために,平滑フィルタが必要である。引き続き出
22
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
力データを結合して,滑らかな連続正弦波を確実に発生させることが重要である。
表A.1−各軸方向当たりの掃引サイクル数及びそれに基づく耐久試験時間
振動数範囲
Hz
掃引サイクル数
1
2
5
10
20
50
100
1 〜 35
10 min
21 min
50 min
1 h 45 min
3 h 30 min
9 h
17 h
1 〜 100
13 min
27 min
1 h 5 min
2 h 15 min
4 h 30 min
11 h
22 h
5 〜 100
9 min
17 min
45 min
1 h 30 min
3 h
7 h
14 h
5 〜 200
11 min
20 min
55 min
1 h 30 min
3 h
7 h
14 h
5 〜 500
13 min
25 min
1 h
2 h
3 h 45 min
9 h
19 h
5 〜 2 000
17 min
33 min
1 h 15 min
2 h 30 min
5 h
13 h
25 h
10 〜 55
5 min
10 min
25 min
45 min
1 h 45 min
4 h
8 h
10 〜 150
8 min
16 min
40 min
1 h 15 min
2 h 30 min
7 h
13 h
10 〜 500
11 min
23 min
55 min
2 h
3 h 45 min
9 h
19 h
10 〜 2 000
15 min
31 min
1 h 15 min
2 h 30 min
5 h
13 h
25 h
10 〜 5 000
18 min
36 min
1 h 30 min
3 h
6 h
15 h
30 h
55 〜 500
6 min
13 min
30 min
1 h
2 h
5 h
11 h
55 〜 2 000
10 min
21 min
50 min
1 h 45 min
3 h 30 min
9 h
17 h
55 〜 5 000
13 min
26 min
1 h 5 min
2 h 15 min
4 h 15 min
11 h
22 h
100 〜 2 000
9 min
17 min
45 min
1 h 30 min
3 h
7 h
14 h
注記1 表の耐久試験時間は,毎分1オクターブの掃引速度に対する計算値であり,端数は切り上げ又
は切り下げによって丸めた。これによる誤差は,10 %未満である。
注記2 下線で示す数字は,附属書B及び附属書Cによる。
応力繰返し数,掃引サイクル(f1→f2→f1)当たりのオクターブ数及び掃引サイクル当たりの掃引時間は,
次の式で算出できる。
(
)
SR
f
f
N
e×
×
×
−
=
2
log
2
60
1
2
2
log
2
log
1
2
e
ef
f
X
×
=
SR
f
f
SR
X
T
e
e
×
×
=
=
2
log
2
log
1
2
ここに,
N: 応力繰返し数
X: 掃引サイクル当たりのオクターブ数
T: 掃引サイクル当たりの掃引時間 (min)
f1: 掃引下限振動数 (Hz)
f2: 掃引上限振動数 (Hz)
SR: 掃引速度(オクターブ/min)
この応力繰返し数の計算方法は,表B.1,表C.1及び表C.2に対しても有効である。
A.4.4 トラッキングフィルタ
A.4.4.1 アナログフィルタ
アナログフィルタは,定帯域幅の場合と定比帯域幅の場合とがある。どちらの場合も,応答時間Trは次
の式で与えられる。
23
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
BW
T
1
r=
ここに,
Tr: 応答時間 (s)
BW: 帯域幅 (Hz)
例 定帯域幅の場合に,10 Hz帯域幅とすると応答時間Trは,次の式となり,この値は,全同調振動
数を通じて一定である。
1.0
101
r
=
=
T
定比帯域幅の場合に,同調振動数fのとき10 %帯域幅とすると,帯域幅BWは,次の式となる。
BW=0.1×f
応答時間Trは,次の式となり,同調振動数の10周期となる。
f
BW
T
10
1
r
=
=
トラッキングフィルタを制御ループに使用するときは,応答時間が非常に重要である。応答時間が長い
場合は,全体の制御応答が遅くなり,その結果,不安定に又は制御不能になることがある。さらに,応答
時間によって,正弦波掃引試験の掃引速度が制限されることがあり,定比帯域幅の場合は,低い振動数で
応答時間Trが数十秒になることがある(4.1.3参照)。
そのため多くのトラッキングフィルタは,同調振動数によって自動的に切り替える複数の定帯域幅設定
を備えるか,又は設定した振動数以下の振動数では定帯域幅とし,それを超える振動数では定比帯域幅を
使用するようにしている。
一般原則として,振幅制御とトラッキングフィルタとの応答速度の相互作用を防ぎ制御を安定させるた
めに,トラッキングフィルタの応答を,制御の振幅圧縮速度(コンプレッサスピード)より5倍速くする
ことが望ましい。フィルタ帯域幅は常に同調振動数未満であることが必要になる。
定帯域幅及び定比帯域幅の応答時間を,表A.2及び表A.3に示す。
表A.2−定帯域幅応答時間
帯域幅
Hz
時間
s
0.1
10
0.5
2
1
1
5
0.2
10
0.1
24
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.3−定比帯域幅応答時間
振動数
Hz
時間
s
帯域幅
1 %
帯域幅
5 %
帯域幅
10 %
5
20
4
2
10
10
2
1
50
2
0.4
0.2
100
1
0.2
0.1
500
0.2
0.04
0.02
1 000
0.1
0.02
0.01
2 000
0.05
0.01
0.005
A.4.4.2 デジタルフィルタ
デジタル制御装置では,アナログトラッキングフィルタと同じ効果を得るために,数値計算技術を用い
る。
基本振動数の信号を出力することに関して最終結果に差は出ないが,デジタル制御装置では,制御ルー
プの応答時間が増加することがある。そのため,高い振動数における制御精度に影響することがある。
A.4.5 制御信号の計測
デジタル制御装置では,データをデジタル化する前にエイリャシング防止フィルタを用いている。この
フィルタは,振動数掃引の進展に合わせて段階的に変化し,高い振動数成分を取り除く効果をもつ。その
結果,デジタル制御装置で観測する信号は,アナログ制御装置の場合より低いrms値となって,結果とし
て同等のアナログ制御装置で制御するよりも高いレベルで試験を制御することがある。デジタルの場合も
アナログの場合も,トラッキングフィルタを使用した場合は,この問題を解決することができる。
A.5 通常防振装置付で使用する機器
A.5.1 防振装置の伝達率
通常,供試品を防振装置に取り付ける場合でも,その利用が不可能なとき,その特性が未知のとき及び
製品規格でその利用を許可していないときは,供試品に実際的な振動入力を与えるような方法で,規定の
レベルを修正する必要がある。この修正レベルは,図A.1の曲線の伝達率を用いて求めるのがよい。
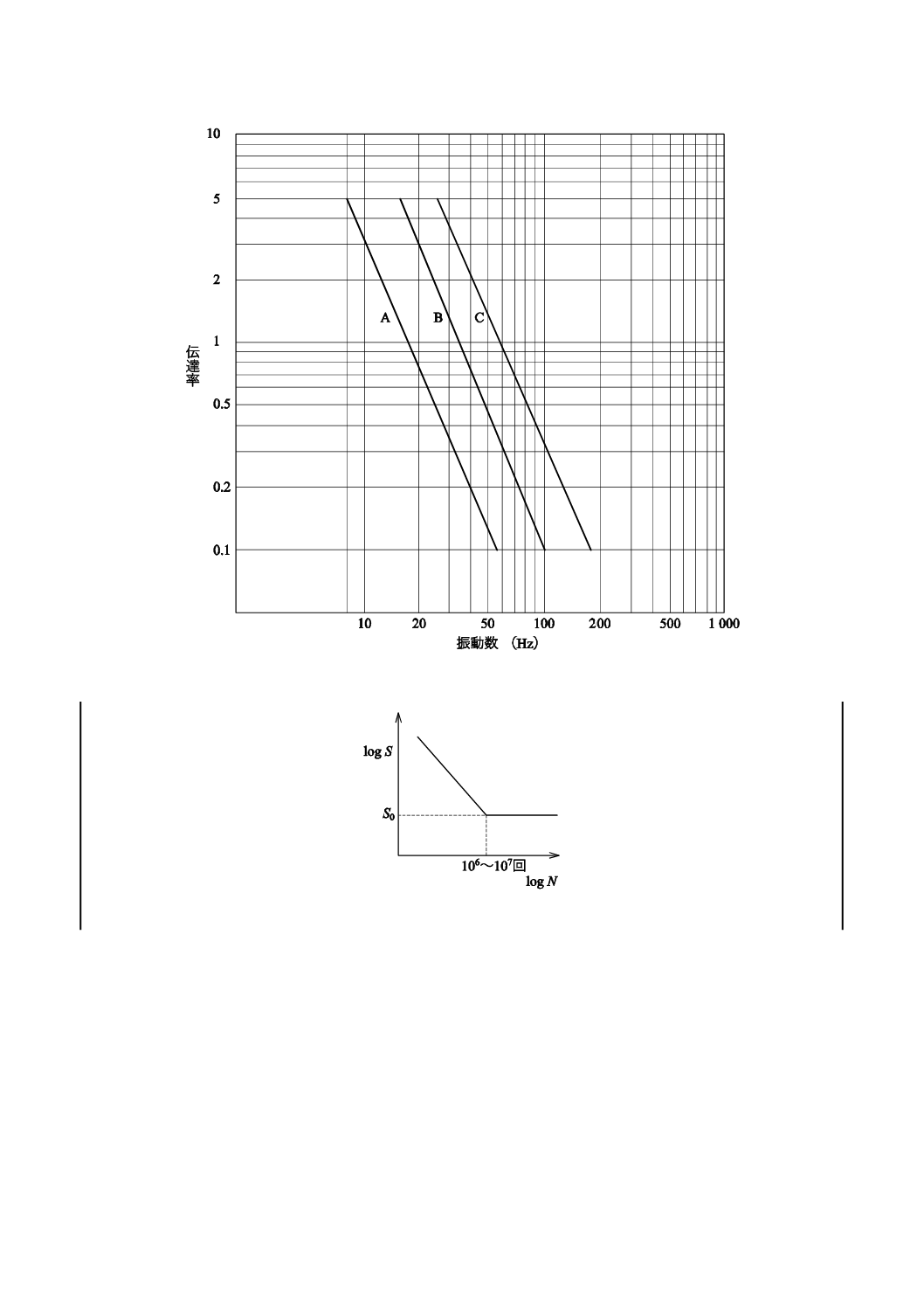
a) 曲線Aは,1自由度系とみなしたときの固有振動数が10 Hz以下の高い弾性の防振装置に取り付ける
場合に適用する。
b) 曲線Bは,1自由度系とみなしたときの固有振動数が10〜20 Hzの中程度の弾性の防振装置に取り付
ける場合に適用する。
c) 曲線Cは,1自由度系とみなしたときの固有振動数が20〜35 Hzの低い弾性の防振装置に取り付ける
場合に適用する。
曲線Bは,1自由度系とみなしたときの固有振動数が約15 Hzの金属製の高減衰ダンパに取り付けた代
表的な航空機用機器の振動測定から求めた。
曲線A及び曲線Cに相当する防振装置の利用できるデータは,非常に少ない。これらの曲線は,その固
有振動数をそれぞれ8 Hz及び25 Hzと仮定して,曲線Bから外挿法によって求めた。
伝達率曲線は,取付方法によって生じる幾つかのモードが結合した伝達特性を包絡するように概算した。
25
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
したがって,これらの曲線を使用するときには,並進運動と回転運動とが結合したときに供試品の外側で
増加する振動レベルが見込まれていることになる。
図A.1から最適な伝達率曲線を選択し,規定振動数範囲で,規定の振動レベルにこの曲線の値を乗じる
ことが望ましい。これらの値の積が,結果として試験室では再現できない試験レベルになることがある。
この場合は,試験レベルを全振動数範囲でいつでも実現可能な最大のレベルに調整することが望ましい。
この場合は,実際に使用した値を試験報告書に記録することが最も重要である。
コンピュータ室のような非常に良好な環境で使用される製品にとっては,輸送時に受ける振動が最も厳
しい場合がある。このような製品を試験する場合は,可能な限り輸送用の包装をした状態で試験すること
が望ましいが,試験時に包装材が使用できないときがある。このような場合は,JIS C 60068-2-47で詳し
く述べている。
A.5.2 温度の影響
多くの防振装置及び包装材は,温度依存性材料を用いていることに注意する必要がある。
防振装置上又は包装材中の供試品の基本共振振動数が試験振動数範囲にある場合は,適用する耐久試験
の時間を決定するときに注意が必要である。状況によっては,中断しないで連続加振をすると問題が生じ
ることがある。基本共振振動数に遭遇する実際の時間配分が分かっている場合は,それをシミュレートす
ることが望ましい。実際の時間配分が分からない場合は,5.3を考慮して加振時間を分割することによって
過度の過熱を避けることが望ましい。
A.6 試験時間
A.6.1 基本概念(5.3.1参照)
現存する多数の規格では,掃引耐久試験を試験時間によって規定している。この方法では,試験振動数
範囲が異なる場合には,共振が励起される回数が異なるため,供試品の共振の影響を比較することは事実
上不可能である。例えば,加速度と耐久試験時間とが同じ場合は,狭い振動数範囲の場合よりも広い振動
数範囲の方が厳しいとしばしば考えられるが,事実はその逆である。耐久試験のパラメータとしての掃引
サイクルの概念は,振動数範囲に関係なく等しく共振が励起されるようにして,この問題を克服すること
である。
A.6.2 試験
試験が単に適切な振幅条件下での供試品の残存能力及び/又は動作能力を実証することである場合は,
規定振動数範囲で,その要求事項を実証するために十分な時間,試験を単に連続するだけでよい。製品が
疲労及び機械的変形のような振動の累積効果に耐える能力を実証する場合は,必要な繰返し応力を累積す
るために十分な時間,試験を実施することが望ましい。無限の疲労寿命を実証するためには,合計107回
の繰返し応力が一般に適切であると考えられている。
注記 金属材料に繰り返し応力を加えたとき,繰返し回数Nと破断に至る応力値Sとの間には,図
A.1Aに示すような関係がある。図A.1Aの曲線を一般に“S−N曲線”という。図A.1Aで,S0
以下の応力を無限回繰り返しても疲労による破断は起こらない。S0を示す折れ点は,一般に,
106〜107回付近にあることが知られている。
A.7 動的応答
損傷の主な原因は,供試品内部に発生する動的応力である。古典的な例では,単純なばね質量系をその
質量より大きな質量の振動体に取り付けたときに,系の内部で発生する応力が原因となる。共振振動数で
26
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,ばね質量系の運動の振幅が増加し,同時にばねに加わる応力も増加する。このような共振振動数での
耐久試験の実施には,多くの技術的判断が必要となる。どの共振が重要であるかを決定することは特に難
しい。励振振動数を共振振動数に維持することもまた難しいことがある。
特により高い振動数においては,共振は外見上には現れないが,それでも高い応力が局所的に生じるこ
とがある。共振の厳しさについては,幾つかの規格で動的倍率によって定義しているが,この規格では,
取り入れていない。
この規格の試験手順は,供試品の動的反作用には左右されずに,振動振幅(変位又は加速度)を規定値
に保たなければならないことを意味している。このことは,標準化に適した一般的な振動試験の技術水準
に合致している。
供試品がその共振振動数で加振されているとき,供試品の見掛けの質量は,実際の取付構造物の質量よ
り大きくなることがよく知られている。このような場合は,供試品の反作用は非常に大きくなる。駆動力
及び構造物の機械インピーダンスは,通常未知であり,これらのパラメータを一般的に仮定することは,
通常極めて難しい。
上記の問題点を軽減する手段として力制御が考えられるが,現時点では,試験手順,計測方法及び許容
差を規定することは不可能であるため,この規格には含めない。このような試験が製品規格で規定された
場合は,力変換器を使用するか又は駆動電流の測定によるか,いずれの方法でも可能である。後者の方法
は,試験の規定振動数の全範囲では,電流が力に比例しないことがあるため,若干の欠点がある。それに
もかかわらず,正しい技術的判断を伴う電流計測を利用する方法は,特に振動数範囲を制限している場合
に使うことができる。
このように力制御による試験は魅力的に見えるが,その使用に当たっては注意が必要である。例えば,
部品の場合には,振幅制御による試験の方が,ほとんどの場合,より適切なことは確実である(箇条8参
照)。
A.8 性能評価
試験の全期間中又は試験の適切な段階で,それが適切である場合には,供試品は,その機能を代表する
ような条件で動作させることが望ましい。耐久試験中の適切な間隔で,又は試験の終了近くで,供試品の
機能検査を行うことが望ましい。
振動がスイッチオン及びスイッチオフの機能(例えば,リレーの動作に対する干渉)に影響を与える可
能性がある供試品の場合は,この問題に対する性能確認を実施するために,試験振動数範囲の全域又は干
渉の起こりやすい振動数のいずれかで,そのような機能を繰り返し検査することが望ましい。
試験が供試品の残存を実証するためだけの場合は,振動耐久試験完了後に供試品の動作性能を評価する
ことが望ましい(8.3及び箇条11参照)。
A.9 初期測定及び最終測定
初期測定及び最終測定の目的は,供試品の振動による影響を評価するために,特定のパラメータを比較
することである。
測定には,目視検査と同様に,電気的及び機械的動作並びに構造特性を含めることがある(箇条7及び
箇条11参照)。
27
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.1−防振装置の一般化した伝達率
図A.1A−S−N曲線
28
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
主として部品に適用する厳しさの例
箇条5で規定した使用可能な厳しさの数は非常に多い。この規格の適用を容易にするため,主として部
品に適用する厳しさの例を,箇条5に規定した推奨パラメータから選択し,表B.1に示す。試験の条件は
この規格に規定しているとおりとする。
表B.1−主として部品に適用する厳しさの例
振動数範囲
Hz
各軸方向の掃引サイクル数
適用例
振幅a)
0.35 mm
又は
50 m/s2
振幅a)
0.75 mm
又は
100 m/s2
振幅a)
1.5 mm
又は
200 m/s2
10 〜 55
10
10
−
工業用大形発電装置,大形回転機械,鋼圧延機,大
形商船及び艦艇用の部品
10 〜 500
10
10
−
はん(汎)用地上設置搬送機械,はん用陸上輸送車
両,小形高速船及び一般航空機用の部品
10 〜 2 000
−
10
10
宇宙用発射台(200 m/s2)の部品,航空機エンジン取
付部品
55 〜 500
10
10
−
55 Hz未満に共振がない小形の高剛性の部品に対し
て10〜500 Hzを適用する場合
55 〜 2 000
−
10
10
55 Hz未満に共振がない小形の高剛性の部品に対し
て10〜2 000 Hzを適用する場合
100 〜 2 000
−
10
10
高剛性超小形部品,例えば,樹脂封止トランジスタ,
ダイオード,抵抗,コンデンサ及び集積回路に対し
て55〜2 000 Hzを適用する場合
注記 一つの振動数範囲に複数の振幅がある場合は,一つを適用する。
注a) 折れ点振動数未満では変位振幅,折れ点振動数を超える振動数では加速度振幅となる。折れ点振動数は,
58〜62 Hz(図2参照)。
応力繰返し数の計算は,A.4.3参照。
固定振動数耐久試験
各軸の各臨界振動数での代表的な耐久試験時間は,10 min,30 min,90 min及び10 hである。
略固定振動数の場合はA.1参照。
指定振動数耐久試験時間は,応力繰返し数の上限値107回を,規定振動数と軸の各組合せに対して適用
することが望ましい。環境条件がよく分かっている場合には,固定振動数に適用する耐久試験時間は,通
常の寿命中に発生する応力繰返し数を基にすることが望ましい。
29
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
主として機器に適用する厳しさの例
C.1 概要
実際の振動の厳しさが分かっている場合は,それを使うことが望ましい(A.4.1参照)。厳しさが分かっ
ていない場合は,任意に選択するが,この附属書に示した適用例ごとの一般化した厳しさを基に類似した
適用例を選択する必要がある。
振動数範囲,振動振幅及び耐久試験時間の幾つかの組合せを,主として機器及びその他の製品の試験に
適用することを意図した例として示す(表C.1及び表C.2参照)。これらの厳しさは,箇条5に規定した耐
久試験の推奨パラメータから選択したものであり,一般的な振動試験の適用範囲をカバーするものと考え
る。ここではすべてを網羅する表を作ったわけではないため,この附属書にない要求事項は,この規格の
他の厳しさの推奨値から選択することが望ましく,その場合は,製品規格に規定することが望ましい。
掃引耐久試験を行うことが実際的でない場合があり,臨界振動数での試験が必要なことがある。その場
合,この規格の該当する箇条に従って,この附属書を指針として用いて,製品規格に規定することが望ま
しい。
表C.1には,10 Hz未満の振動数及び8〜10 Hzに折れ点振動数がある例を含まない。ただし,実際の製
品規格では,用途によっては5 Hz又は1 Hzから始まる例が多く見受けられる。
表C.1−掃引耐久試験−低い折れ点振動数の例
振動数範囲
Hz
各軸方向の掃引サイクル数
適用例
加速度
5 m/s2
加速度
10 m/s2
加速度
20 m/s2
10 〜 150
50
−
−
大形計算機,圧延機のような据付け機器で,長時間
の振動を受ける場合
10 〜 150
20
−
−
大形送信機及び空調装置のような据付け機器で,断
続的振動を受ける場合
10 〜 150
−
20
20
船舶,鉄道及び陸上車両に取り付けるか又は輸送さ
れる機器
注記 一つの振動数範囲に複数の振幅がある場合は,一つを適用する。
応力繰返し数の計算は,A.4.3参照。
C.2 固定振動数耐久試験
各軸の各臨界振動数での代表的な耐久試験時間は,10 min,30 min,90 min及び10 hである。
略固定振動数の場合は,A.1参照。
指定振動数耐久試験時間は,応力繰返し数の上限値107回を,規定振動数と軸の各組合せに対して適用
することが望ましい。環境条件がよく分かっている場合には,固定振動数に適用する耐久試験時間は,通
常の寿命中に発生する応力繰返し数を基にすることが望ましい。
30
C 60068-2-6:2010 (IEC 60068-2-6:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表C.2−掃引耐久試験−高い折れ点振動数の例
振動数範囲
Hz
各軸方向の掃引サイクル数
適用例
振幅a)
0.15 mm
又は
20 m/s2
振幅a)
0.35 mm
又は
50 m/s2
振幅a)
0.75 mm
又は
100 m/s2
振幅a)
1.5 mm
又は
200 m/s2
1 〜 35 b)
−
100
100
−
大形回転機械の近くに設置する機器
10 〜 55 b)
10
20
100
−
20
−
−
−
−
−
−
−
大形発電装置及び一般工業用に用いる機器
10 〜 150
10
20
100
−
20
−
−
−
−
−
−
−
大形発電装置及び一般工業用に用いる機器で,55
Hzを超える振動数成分が認められることが分か
っている場合
10 〜 500
10
10
−
−
一般航空機用機器,高い方の値はエンジンコンパ
ートメント近くの機器に適用するが,エンジンコ
ンパートメント内の機器は除く
10 〜 2 000
−
10
10
−
高速航空機用機器,高い方の値はエンジンコンパ
ートメント近くの機器に適用するが,エンジンコ
ンパートメント内の機器は除く
10
航空機のエンジンコンパートメント内の機器
注記 一つの振動数範囲に複数の振幅がある場合は,一つを適用する。
注a) 折れ点振動数未満では変位振幅,折れ点振動数を超える振動数では加速度振幅となる。折れ点振動数は,
58〜62 Hz(図2参照)。
b) 定変位振幅試験
応力繰返し数の計算は,A.4.3参照。
C.3 固定振動数耐久試験
(対応国際規格では,この細分箇条において,C.2の参考事項を繰り返しているので,不採用とした。)
参考文献
JIS C 60068-2-64 : 1997 環境試験方法−電気・電子−広帯域ランダム振動試験方法及び指針
注記 対応国際規格:IEC 60068-2-64 : 1993,Environmental testing−Part 2 : Test methods−Test Fh:
Vibration, broad-band random (digital control) and guidance (IDT)
JIS C 60721-3規格群 環境条件の分類−第3部:環境パラメータとその厳しさのグループ別分類
注記 対応国際規格:IEC 60721-3 (all parts),Classification of environmental conditions−Part 3:
Classification of groups of environmental parameters and their severities (IDT)
JIS Q 17025 : 2005 試験所及び校正機関の能力に関する一般要求事項
注記 対応国際規格:ISO/IEC 17025 : 2005,General requirements for the competence of testing and
calibration laboratories (IDT)
IEC 60050-721 : 1991,International Electrotechnical Vocabulary−Chapter 721 : Telegraphy, facsimile and data
communication