C 6185-1:2017
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義··················································································································· 1
4 標準試験条件··················································································································· 3
5 試験の概要······················································································································ 4
5.1 試験の種類 ··················································································································· 4
5.2 不確かさの算出方法 ······································································································· 4
5.3 確度の算出方法 ············································································································· 4
5.4 試験に対する補足説明 ···································································································· 5
6 距離の不確かさ及び確度の試験 ··························································································· 5
6.1 距離の不確かさ及び確度の試験の概要 ··············································································· 5
6.2 不確かさの算出方法 ······································································································· 6
6.3 確度の算出方法 ············································································································· 7
6.4 標準試験条件における距離の不確かさ及び確度の試験 ·························································· 8
6.5 動作条件における距離の不確かさ及び確度の試験 ······························································· 11
7 損失の不確かさ及び確度の試験 ·························································································· 12
7.1 損失の不確かさ及び確度の試験の概要 ·············································································· 12
7.2 標準試験条件における損失の不確かさ及び確度の試験 ························································· 12
7.3 動作条件における損失の不確かさ及び確度の試験 ······························································· 14
7.4 損失不確かさの合成 ······································································································ 15
7.5 確度 ··························································································································· 15
8 反射率の不確かさ及び確度の試験 ······················································································· 15
8.1 反射率の不確かさ及び確度の試験の概要 ··········································································· 15
8.2 標準試験条件における反射率の不確かさ及び確度の試験 ······················································ 16
8.3 動作条件における反射率の不確かさ及び確度の試験 ···························································· 18
8.4 反射率不確かさの合成 ··································································································· 19
8.5 確度 ··························································································································· 19
9 その他の性能試験············································································································ 19
9.1 試験の概要 ·················································································································· 19
9.2 光パルス幅及び光出力レベル ·························································································· 19
9.3 中心光波長及び光スペクトル幅 ······················································································· 20
9.4 ダイナミックレンジ ······································································································ 21
9.5 デッドゾーン(空間分解能) ·························································································· 22
10 強度試験 ······················································································································ 25
C 6185-1:2017 目次
(2)
ページ
10.1 強度試験の概要 ··········································································································· 25
10.2 振動試験 ···················································································································· 25
10.3 落下試験 ···················································································································· 26
附属書A(規定)不確かさの規定 ··························································································· 27
附属書B(参考)後方散乱光反射率の測定方法 ········································································· 31
附属書C(参考)等価光パルス幅及びピーク出力レベルの測定方法 ·············································· 37
C 6185-1:2017
(3)
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人光産業技術振興協会(OITDA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。これによって,
JIS C 6185:2008は廃止され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 6185の規格群には,次に示す部編成がある。
JIS C 6185-1 第1部:試験方法
JIS C 6185-2 第2部:校正方法−シングルモード光ファイバ用OTDR
JIS C 6185-3 第3部:校正方法−マルチモード光ファイバ用OTDR
日本工業規格 JIS
C 6185-1:2017
オプティカルタイムドメインリフレクトメータ
(OTDR)−第1部:試験方法
Optical time-domain reflectometers (OTDR)-Part 1: Test methods
序文
この規格は,オプティカルタイムドメインリフレクトメータに対する試験方法を規定することによって,
安定した統一の試験を行うことを目的としている。
1
適用範囲
この規格は,光ファイバに光パルスを入射し,それによって生じる光ファイバの後方散乱光強度を時間
領域で測定するオプティカルタイムドメインリフレクトメータ(以下,OTDRという。)の試験方法につい
て規定する。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 1002 電子測定器用語
JIS C 6802 レーザ製品の安全基準
JIS C 6823 光ファイバ損失試験方法
JIS C 6832 石英系マルチモード光ファイバ素線
JIS C 6835 石英系シングルモード光ファイバ素線
JIS C 60068-2-6 環境試験方法−電気・電子−第2-6部:正弦波振動試験方法(試験記号:Fc)
JIS C 60068-2-31 環境試験方法−電気・電子−第2-31部:落下試験及び転倒試験方法(試験記号:
Ec)
JIS Z 8103 計測用語
JIS Z 8120 光学用語
ISO/IEC Guide 98-3:2008,Uncertainty of measurement−Part 3: Guide to the expression of uncertainty in
measurement (GUM: 1995)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS C 1002,JIS Z 8103及びJIS Z 8120によるほか,次による。
2
C 6185-1:2017
3.1
オプティカルタイムドメインリフレクトメータ,OTDR
光ファイバに光パルスを入射し,その光パルスによって生じるフレネル反射光及び光ファイバの後方散
乱光の強度を,その入射端において時間領域で測定し画面に表示することによって,光ファイバの障害点
又は損失を測定する機能をもつ光測定器。
3.2
フレネル反射光
異なる屈折率をもつ物質の境界面を,光が通過するときに発生する反射光。光コネクタ及び/又は十分
にきれいに切断された光ファイバの端面を大気中に置いた場合には,端面に入射する光の約4 %が反射す
る。
3.3
後方散乱光
光ファイバに光を入射したときに,散乱源から入射光の伝搬方向とは逆方向(入射側)に戻る光。
3.4
距離レンジ
OTDRの画面上に表示できる距離。最大のものは最大距離レンジという。実際の測定可能距離は,一般
には最大距離レンジよりも小さい。厳密には,光ファイバの群屈折率の値によって異なるが,便宜上,群
屈折率の値を1.460 0としたときの距離値で表す。
3.5
ダイナミックレンジ
後方散乱光強度が測定可能な範囲。光ファイバの損失値(dB値)で表す。後方散乱波形の延長線とパワ
ー軸との交点における光パワーレベルと雑音レベルとの差によって表すことができる。
3.6
デッドゾーン
光コネクタなどの反射点で生じる反射光及びその反射光で生じる受信波形のすそ引きによって,引き続
く反射点,融着点,接続点などの位置,損失,反射率などの測定が不能となる距離範囲。反射点から引き
続く反射点の識別及び反射率測定が不能となる距離範囲である“反射測定デッドゾーン”と,他の接続点
又は光ファイバの損失測定が不能となる距離範囲である“損失測定デッドゾーン”との二つがある。それ
ぞれ,口元でのデッドゾーンを,“反射測定口元デッドゾーン”及び“損失測定口元デッドゾーン”という。
3.7
空間分解能
光ファイバの反射点,融着点,接続点などから,これと異なる反射点,融着点,接続点などの分離,識
別又は光ファイバの損失測定が可能となる最短距離。光ファイバの無反射接続部に生じる波形のすそ引き
によって規定する場合が“無反射接続点直後の空間分解能”であり,この場合には損失測定が可能な最短
距離である“損失測定空間分解能”だけを定義する。
3.8
後方散乱光反射率
光ファイバを伝搬する方形波状の光パルスによって発生するレイリー後方散乱光のパワーと,この光パ
ルスのピークパワーとの比。光ファイバのレイリー散乱係数,屈折率分布,及び光パルス幅によって決ま
るパラメータである。
3
C 6185-1:2017
3.9
不確かさ(uncertainty)
ある測定値に対して,その測定対象とした値が存在する範囲の広さを確率的に推定したもの。詳細は,
ISO/IEC Guide 98-3:2008の“計測における不確かさの表現の指針”を参照。
3.10
標準不確かさ(standard uncertainty)
不確かさを,測定対象となった値の確率分布の標準偏差の値によって表記したもの。
3.11
拡張不確かさ(expanded uncertainty)
測定結果の値の分布の大部分を含むと期待される区間を規定する量。測定器の誤差の限界を示す指標と
して用いられる。
3.12
確度
試験の結果によって推定した測定器の動作誤差の限界値。測定器のかたよりに,測定結果のばらつきに
伴う不確かさの影響を加算することによって算出する。
注記1 “確度”は,測定量とその“真の値”との一致度を示す指標の意味で用いられる場合がある
が,“不確かさ”の規定の下では,“真の値”が未知のため,この意味での“確度”は定義で
きない。そこで,この規格では,ここで定義した意味に限定して“確度”を規定する。
注記2 “確度”及び“拡張不確かさ”は,いずれも誤差の限界を示す指標であるが,“確度”は測定
器のかたよりを明示的に含む点において,“拡張不確かさ”とは異なる概念である。
4
標準試験条件
OTDR(以下,試験対象とするOTDRを“被試験器”という。)を試験するとき標準となる条件は,ほか
に規定がない限り,次のとおりとする。
標準試験条件で試験することが困難な場合は,実施した条件及びその影響を試験結果に記録しなければ
ならない。
a) 温度 (23±2) ℃
b) 相対湿度 (50±20) %
c) 光ファイバ ほかに規定がない限り,被試験器の種別に応じて表1に示す光ファイバを用いる。
なお,表中の記号は,JIS C 6832又はJIS C 6835の規定による。
表1−試験時に用いる光ファイバ
被試験器種別
試験時に用いる光ファイバ
適用光ファイバの種別
光源波長
nm
マルチモード光ファイバ
850
SGI-50/125
1300
シングルモード光ファイバ
1310
SSMA-9/125,SSMA-9.5/125,
SSMA-10/125
1550
SSMA-9/125,SSMA-9.5/125,
SSMA-10/125,SSMB-8/125
4
C 6185-1:2017
5
試験の概要
5.1
試験の種類
被試験器の性能は,距離,損失及び反射率に対する不確かさ及び確度の試験,並びに光パルス幅,光出
力レベル,中心光波長,光スペクトル幅,ダイナミックレンジ,デッドゾーン及び空間分解能の各試験を
行って評価する。ただし,これらの各試験は評価項目の次元が異なるので,各試験での不確かさは各項目
ごとの評価値とし,それを足し合わせて総合不確かさとすることはしない。また,反射率測定機能がない
ものは,その試験は行わなくてよい。
なお,上記試験とは別に,被試験器の機械的強度を確認するため,強度試験を行う。
5.2
不確かさの算出方法
距離,損失及び反射率について,被試験器のかたより及び不確かさを評価する。評価方法は,まず,標
準試験条件における不確かさ及び確度の試験によって,指示値のかたより及び測定のばらつきに伴う標準
不確かさを算出し,次に各動作条件に対する不確かさ及び確度の試験によって,それぞれの動作条件に対
する被試験器の不確かさの寄与を算出する(附属書Aを参照)。距離以外のかたより及び不確かさは相対
値で表記し,パーセント(%)又はデシベル(dB)で求める。
なお,不確かさは,被試験器の指示値についてかたよりを補正した結果に対してだけ有効となる点に注
意する。
距離以外の評価対象に対する被試験器の不確かさは,式(1)によって算出する。
∑
=
+
=
p
i
i
u
u
u
1
2
t
2
to
t
······································································ (1)
ここに,
ut: 被試験器の合成標準不確かさ
uto: 標準試験条件における不確かさ
uti: 各動作条件に対する不確かさの寄与
i: 各動作条件に対する添字
p: 動作条件の数
また,式(1)で算出した不確かさの値を式(2)に代入して,拡張不確かさを算出する。被試験器の精度(誤
差の限界)を表示する場合は,拡張不確かさの値を用いる。
tu
k
U =
·················································································· (2)
ここに,
U: 拡張不確かさ
k: 包含係数
約95 %の信頼の水準に対してはk=2となる。約99 %の信頼の水準を選択する場合,k=3となる。この
kの値は,ISO/IEC Guide 98-3:2008の記載に沿って,その有効性を確認することが望ましい。有効でない
場合,より大きい包含係数を,これらの信頼の水準を達成するために用いることが望ましい。
なお,距離の不確かさの算出方法は,箇条6に示す。
5.3
確度の算出方法
被試験器の確度の評価方法は,まず標準試験条件における不確かさ及び確度の試験で指示値のかたより
及び不確かさを求め,次に各動作条件に対する不確かさ及び確度の試験で被試験器の不確かさの寄与を求
める。次に,これらのかたより及び不確かさの値を式(3)に代入することによって動作誤差の限界を算出し,
被試験器の確度とする(A.6を参照)。
∑
=
+
±
=
±
=
p
i
i
u
u
k
D
u
k
D
ε
ε
1
2
t
2
to
to
t
to
tl
tu
··············································· (3)
5
C 6185-1:2017
ここに,
εtu: 動作誤差の上限
εtl: 動作誤差の下限
Dto: 被試験器のかたより
k: 包含係数
ut: 被試験器の合成標準不確かさ
uto: 標準試験条件における不確かさ
uti: 各動作条件に対する不確かさの寄与
i: 各動作条件に対する添字
p: 動作条件の数
なお,かたより補正ができる場合は,式(3)の第1項を除いてよい。
注記1 式(3)で与えられる誤差の限界値の区間は,式(2)で算出した拡張不確かさと同じになる。包含
係数kの値は,求める確度の信頼の水準に応じて適切に選択するとともに,その値を明記す
る。
注記2 かたよりDtoは,各被試験器ごとに固有の値をもつ。Dtoを被試験器ごとのばらつきとみなし,
同一OTDR製品群の仕様値として確度を評価する場合は,式(A.14)又は式(A.15)によって誤差
の限界値を算出してもよい。ただし,対象となるOTDR製品の台数が少なく,製品ごとの
Dtoの分布を精度良く求められない場合は,評価結果が不正確となる可能性があるため,十分
な注意が必要である。
5.4
試験に対する補足説明
異なるパルス幅での測定は独立に取り扱い,パルス幅を動作条件に含めることはしない。また,被試験
器の測定時間は,平均化処理によって雑音が十分抑圧される時間とする。
6
距離の不確かさ及び確度の試験
6.1
距離の不確かさ及び確度の試験の概要
距離測定の不確かさ及び確度を算出するときに,被試験器のかたよりDLtは,式(4)に示す距離の関数に
従うものとする。
)
(
q
scale
ofs
Lt
L
u
L
L
D
+
+
=
ε
···························································· (4)
ここに, DLt: 被試験器のかたより(m)
Lofs: 距離オフセット(m)
εscale: 距離スケール偏差(m/m)
L: 光ファイバ入射端からの距離(m)
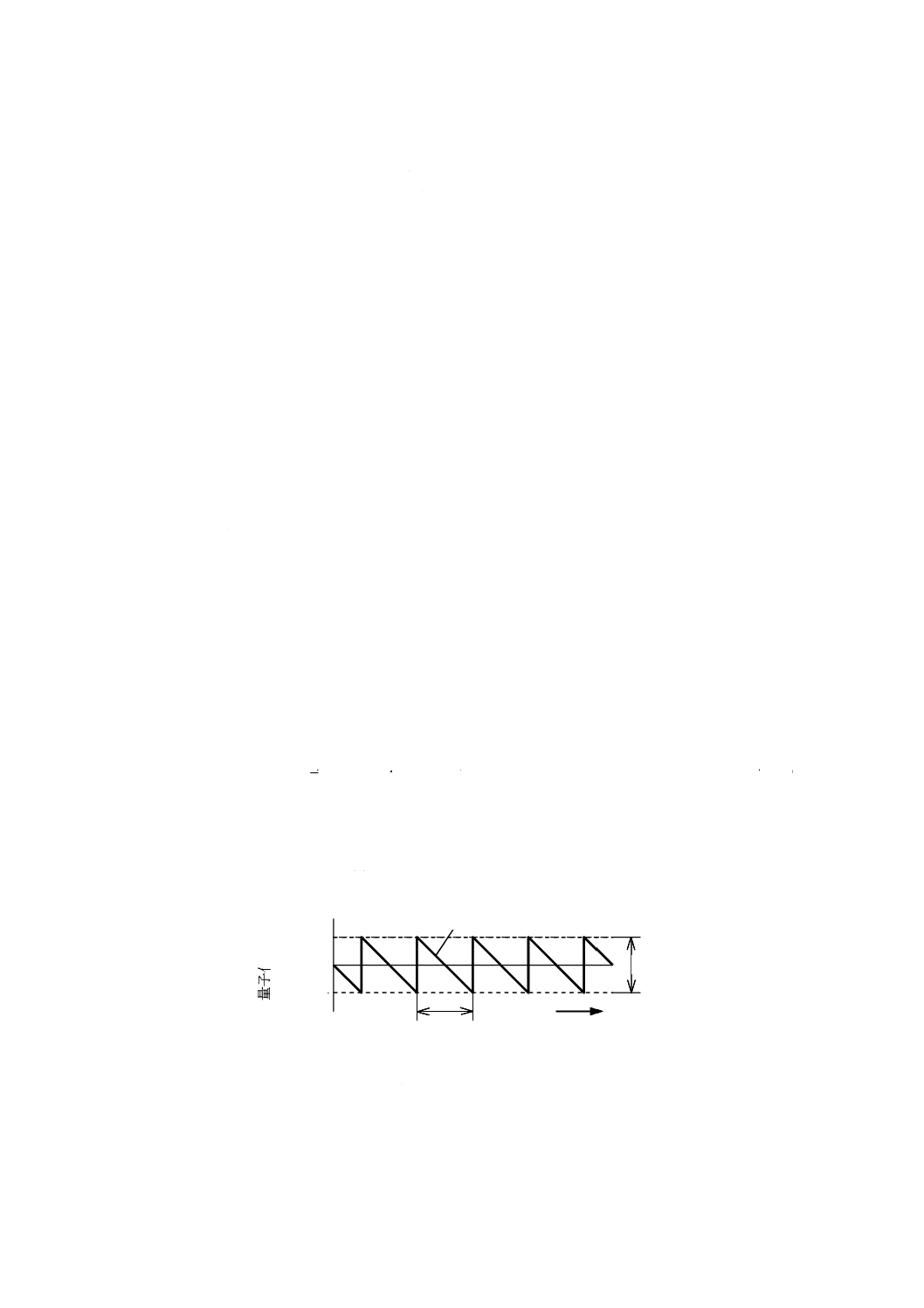
uq(L): 距離読取りのときに生じる量子化誤差(m)
量
子
化
誤
差
0
距離L
Lsmp
uq(L)
Lsmp
Lsmp
2
Lsmp
2
−
図1−量子化誤差の関数形
量子化誤差uq(L)は,図1に示すように,被試験器が後方散乱光波形を取得するときの波形サンプリング
周期tsmpに相当する距離Lsmpで繰り返す周期関数となる。この場合,サンプリング距離Lsmpは,式(5)によ
って算出する。
距離L
Lsmp
Lsmp
Lsmp
Lsmp
uq(L)
6
C 6185-1:2017
smp
g
smp
2
t
N
c
L
=
·········································································· (5)
ここに, Lsmp: サンプリング距離(m)
Ng: 光ファイバの群屈折率(1.460 0に設定する。)
c: 真空中の光速度(m/s)
tsmp: 波形サンプリング周期(s)
uq(L)の値は距離Lの変化に対して−Lsmp/2〜Lsmp/2の範囲で変化し,この範囲内で一様に分布する。一般
にLsmpは小さい値であるため,距離Lの測定結果のばらつきによって,その測定結果から算出されるuq(L)
の値もばらつきを伴うこととなる。したがって,式(5)におけるuq(L)の影響は,距離測定のばらつきに伴う
不確かさに含めて取り扱う。
短距離及び長距離の二つの距離サンプルに対して標準試験条件における距離の不確かさ及び確度の試験
を実施し,その結果(測定値及びそのばらつき)を,式(4)からuqの項を除いた式に当てはめることによっ
て,標準条件試験での距離オフセット及びその不確かさ,距離スケール偏差及びその不確かさ並びに量子
化誤差を含む距離測定のばらつきに伴う不確かさを算出する。また,各動作条件における距離の不確かさ
及び確度の試験によって,それぞれの動作条件に起因する距離オフセット及び距離スケール偏差の不確か
さの寄与分を算出する。また,これらの値を用いて距離測定に対する被試験器の確度を規定する。
注記 JIS C 6185-2及びJIS C 6185-3では,距離オフセット及び距離スケール偏差の算出に最小二乗
法を用いることを推奨しているが,この規格では最小二乗法を用いず,より簡便な算出法を採
用している。これは,次の理由による。
a) 最小二乗法を用いた算出法では,多数の距離サンプルに対する測定が必要となり,試験の実施に多大
の時間及び労力を要する。
b) この規格は,仕様規格に対する適合性の試験に供することを想定しており,被試験器の校正に比較し
て,厳密さよりも簡便さを優先している。
6.2
不確かさの算出方法
距離オフセット及び距離スケール偏差に対する不確かさは,標準試験条件での試験によって得た不確か
さ及び各動作条件における試験で得た不確かさの寄与から求める。動作条件としては温度依存性を考慮す
ることとし,不確かさは,それぞれ式(6)及び式(7)によって算出する。
2
T
Lp,
2
Ll
Lofs
u
u
u
+
=
······································································ (6)
2
T
sp,
2
sl
scale
u
u
u
+
=
······································································· (7)
ここに, uLofs: 距離オフセットの合成標準不確かさ(m)
uscale: 距離スケール偏差の合成標準不確かさ(m/m)
uLl: 標準試験条件における距離オフセットの標準不確かさ(m)
usl: 標準試験条件における距離スケール偏差の標準不確かさ(m)
uLp,T: 温度依存性によるuLofsの不確かさの寄与
usp,T: 温度依存性によるuscaleの不確かさの寄与
また,距離測定値のばらつきに伴う標準不確かさuLtoは,式(8)によって算出する。
2
tq
2
tl
Lto
u
u
u
+
=
·········································································· (8)
ここに, uLto: 距離測定値のばらつきに伴う標準不確かさ(m)
utl: 距離測定値のばらつきの標準偏差(m)
utq: 読取り量子化誤差に伴う標準不確かさ(m)
7
C 6185-1:2017
このとき,任意の距離の測定に対するかたより及び不確かさは,距離測定値のばらつきに伴う不確かさ
並びに距離オフセット及び距離スケール偏差の不確かさの値を用いて,式(9)及び式(10)によって算出する。
L
ε
L
L
D
+
=
scale
ofs
Lt
)
(
·································································· (9)
2
2
scale
2
Lofs
2
Lto
Lt
)
(
L
u
u
u
L
u
+
+
=
······················································ (10)
ここに, DLt: 被試験器のかたよりの距離依存性(m)
uLt: 距離測定値のばらつきに伴う標準不確かさ(m)
uLto: 距離測定値のばらつきに伴う標準不確かさ(m)
L: 測定対象となる距離(m)
また,式(10)で算出した距離測定に対する不確かさを用いて,任意の距離Lにおける拡張不確かさを,
式(11)によって算出する。
2
2
scale
2
Lofs
2
Lto
Lt
Lt
)
(
)
(
L
u
u
u
k
L
u
k
L
U
+
+
=
=
·····································(11)
ここに, ULt: 拡張不確かさ(m)
k: 包含係数
包含係数kは,約95 %の信頼の水準に対してはk=2となる。約99 %の信頼の水準を選択する場合,k
=3となる。このkの値は,ISO/IEC Guide 98-3:2008の記載に沿って,その有効性を確認することが望ま
しい。有効でない場合,これらの信頼の水準を達成するために,より大きい包含係数を用いることが望ま
しい。
6.3
確度の算出方法
上で算出した距離測定に対するかたより及び不確かさの値から,任意の距離Lに対する被試験器の動作
誤差の限界を,式(12)によって算出する。
)
(
)
(
)
(
)
(
Lt
Lt
Ltl
Ltu
L
u
k
L
D
L
ε
L
ε
±
=
2
2
scale
2
Lofs
2
Lto
scale
ofs
L
u
u
u
k
L
ε
L
+
+
±
+
=
······························ (12)
ここに, εLtu: 動作誤差の上限(m)
εLtl: 動作誤差の下限(m)
L=0の近傍では,短尺光ファイバに対する確度として,動作誤差の限界を式(13)で近似してもよい。
2
Lofs
2
Lto
ofs
Ltl,0
0
Ltu,
u
u
k
L
ε
ε
+
±
=
························································ (13)
ここに, εLtu,0: 動作誤差の上限(m)
εLtl,0: 動作誤差の下限(m)
また,Lが十分に大きい(uscaleL≫uLofs,uLto)場合は,長尺光ファイバに対する確度として,動作誤差の
限界を式(14)によって算出した相対値で近似してもよい。
scale
scale
s
Ltl,
s
Ltu,
u
k
ε
ε
ε
±
=
································································ (14)
ここに, εLtu,s: 動作誤差の上限(m/m)
εLtl,s: 動作誤差の下限(m/m)
注記1 包含係数kの値は,求める確度の信頼の水準に応じて適切に選択するとともに,その値を明
記する。
8
C 6185-1:2017
注記2 Lofs及びεscaleは,被試験器ごとに固有の値をもつ。被試験器ごとのLofs及びεscaleのばらつきを,
それぞれ誤差要因の一つと捉え,同一OTDR製品群の仕様値として確度を評価する場合,式
(A.14)の定義に従って誤差の限界値を算出してもよい。この場合,短尺光ファイバ及び長尺
光ファイバに対する確度は,それぞれ式(15)及び式(16)によって算出する。
2
Lofs
2
Lto
2
Lofs
Ltl,0
0,
Ltu
u
u
k
ε
ε
+
+
±
=
σ
···················································· (15)
2
scale
2
scale
s
Ltl,
s
Ltu,
u
k
ε
ε
+
±
=
σ
··························································· (16)
ただし,σLofs及びσscaleは,被試験器ごとのLofs及びεscaleの分布にかたよりがない場合におけるそれぞれ
のばらつきの標準偏差であり,それぞれ式(17)及び式(18)によって算出する。
∑
=
=
Q
j
j
L
Q
σ
1
2
,
ofs
Lofs
1
··································································· (17)
∑
=
=
Q
j
j
ε
Q
σ
1
2
,
scale
scale
1
·································································· (18)
ここに, σLofs: 被試験器の距離オフセットのばらつきの標準偏差(m)
σscale: 被試験器の距離スケール偏差のばらつきの標準偏差(m/m)
Q: 被試験機の台数
j: 被試験器の識別番号
Lofs,j: 被試験器(識別番号j)の距離オフセット(m)
εscale,j: 被試験器(識別番号j)の距離スケール偏差(m/m)
注記3 長尺光ファイバに対する確度の相対値は,必要に応じて適宜百分率(%),百万分率(ppm)
などの単位を用いて表示してもよい。
6.4
標準試験条件における距離の不確かさ及び確度の試験
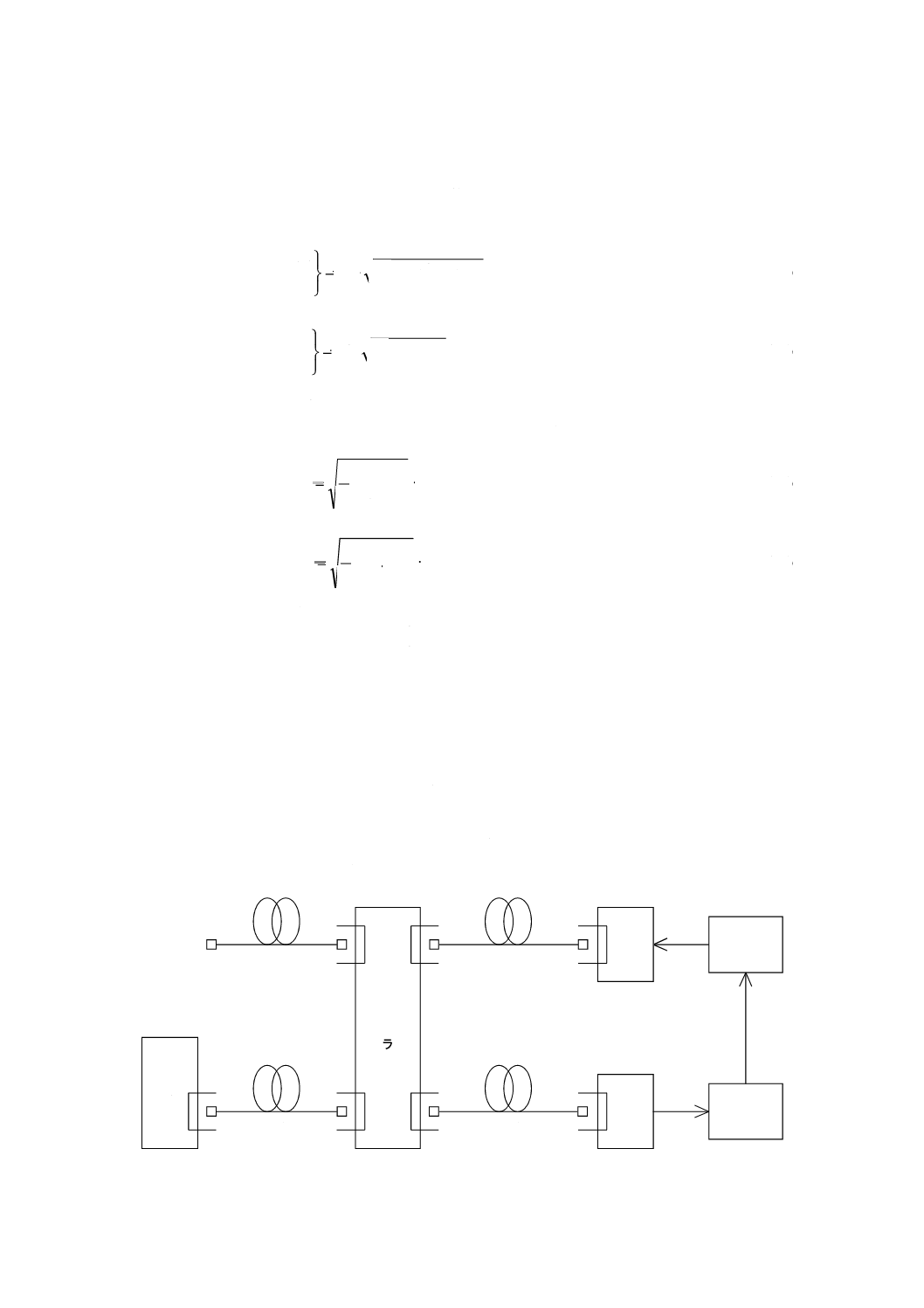
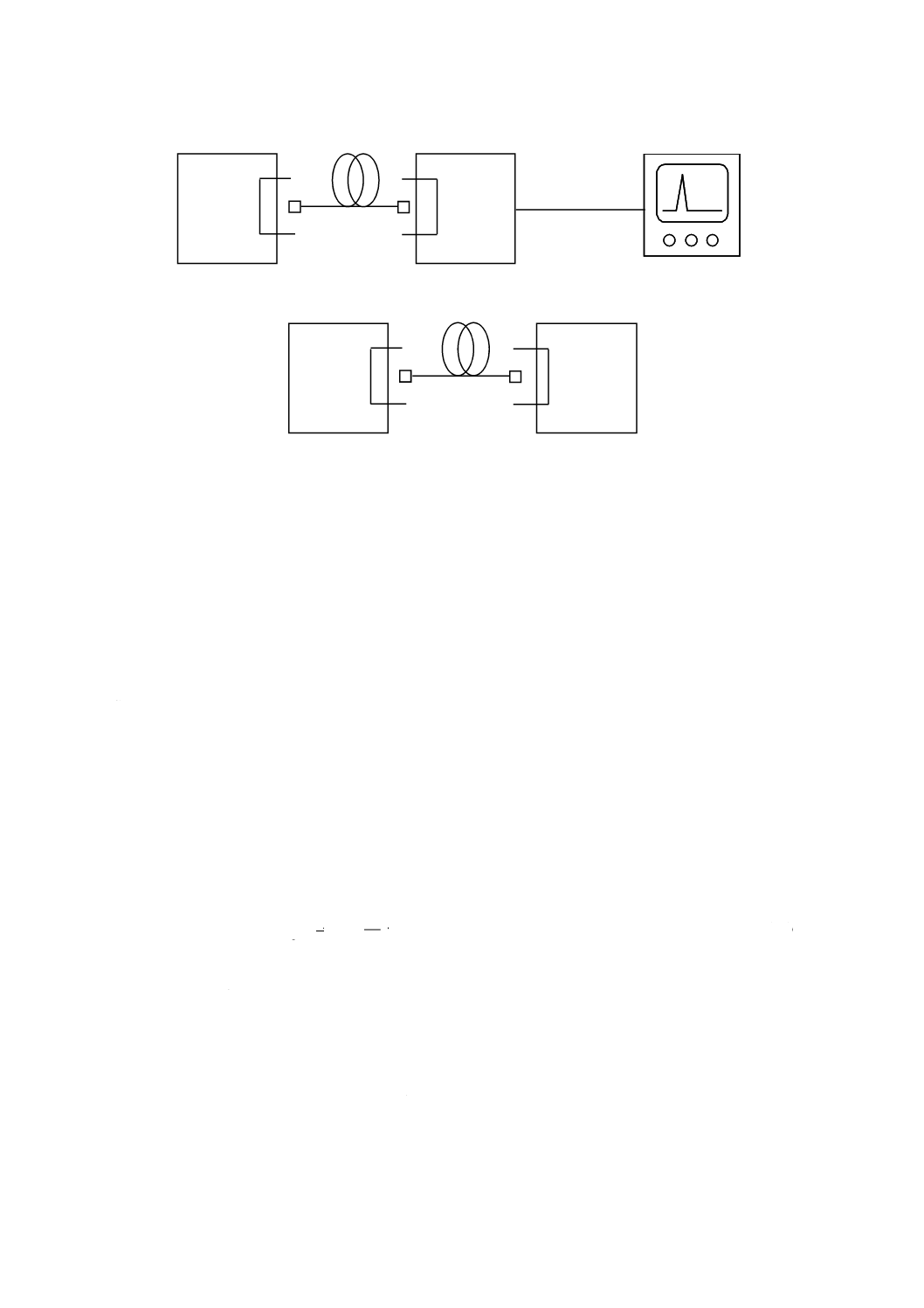
図2に,標準試験条件における距離の不確かさ及び確度の試験の試験系を示す。試験は標準条件で行う。
OTDRでは距離は直接的には測定できず,OTDRから出射した光パルスによって生じた光ファイバの後方
散乱光がOTDRに到達する時間から算出する。このため測定は,全て時間領域で行う。
デジタル
ディレイ
発生器
光
カ
プラ
光ファイバF3
パルス
発生器
受
光
器
光ファイバF2
光
源
光ファイバF4
光ファイバ
F1
被
試
験
器
図2−標準試験条件における距離の不確かさ及び確度の試験の試験系
9
C 6185-1:2017
標準試験条件における距離の不確かさ及び確度の試験における装置及び試験手順は,次による。
a) 装置
1) 光源 被試験器と同一の光波長をもち,また,パルス発生器から入力される電気パルス及び出力さ
れる光パルスの遅延時間が,常に一定であるものを用いる。
2) 受光器 被試験器の光パルス幅が測定可能な十分広い帯域をもち,入力される光パルス及び出力さ
れる電気パルスの遅延時間が,常に一定であるものを用いる。
3) 光カプラ 入力された光を,分岐又は結合する機能をもつものを用いる。
4) パルス発生器 入力パルスの立ち上がり又は立ち下がりをトリガとして,必要なパルス幅のパルス
を発生し,また,入力パルス及び出力パルスの遅延時間が,常に一定であるものを用いる。
5) デジタルディレイ発生器 入力パルス及び出力パルスの遅延時間が可変であり,測定範囲内で設定
遅延時間の不確かさが,既知のものを用いる。
6) 光ファイバ 種類は,表1から選択する。長さは2 m以上とする。
7) タイムインターバルカウンタ 入力パルスの時間間隔を測定するもので,測定範囲内で測定値の不
確かさが,既知のものを用いる。
b) 試験手順
1) デジタルディレイ発生器の遅延時間として,反射測定口元デッドゾーンの範囲を除いた測定距離レ
ンジ内で,その下限値及び上限値に近い距離に対応する二つの値を設定し,それぞれtds(s)及びtdl
(s)とする。
2) 図2の試験系で,デジタルディレイ発生器の遅延時間をtdsに設定して被試験器のディスプレイ画面
上にパルスを表示し,そのときのパルス位置をM回(Mは10以上)繰り返して測定する。この測
定のi回目の測定値をds,i(m)とし,式(19)によって遅延時間tls,i(s)を算出する。ただし,デジタ
ルディレイ発生器の遅延時間をゼロに設定したときの試験系の伝搬時間tcalはtdsに含まれていない
ものとする。
i
i
d
c
N
t
s,
g
ls,
2
=
··········································································· (19)
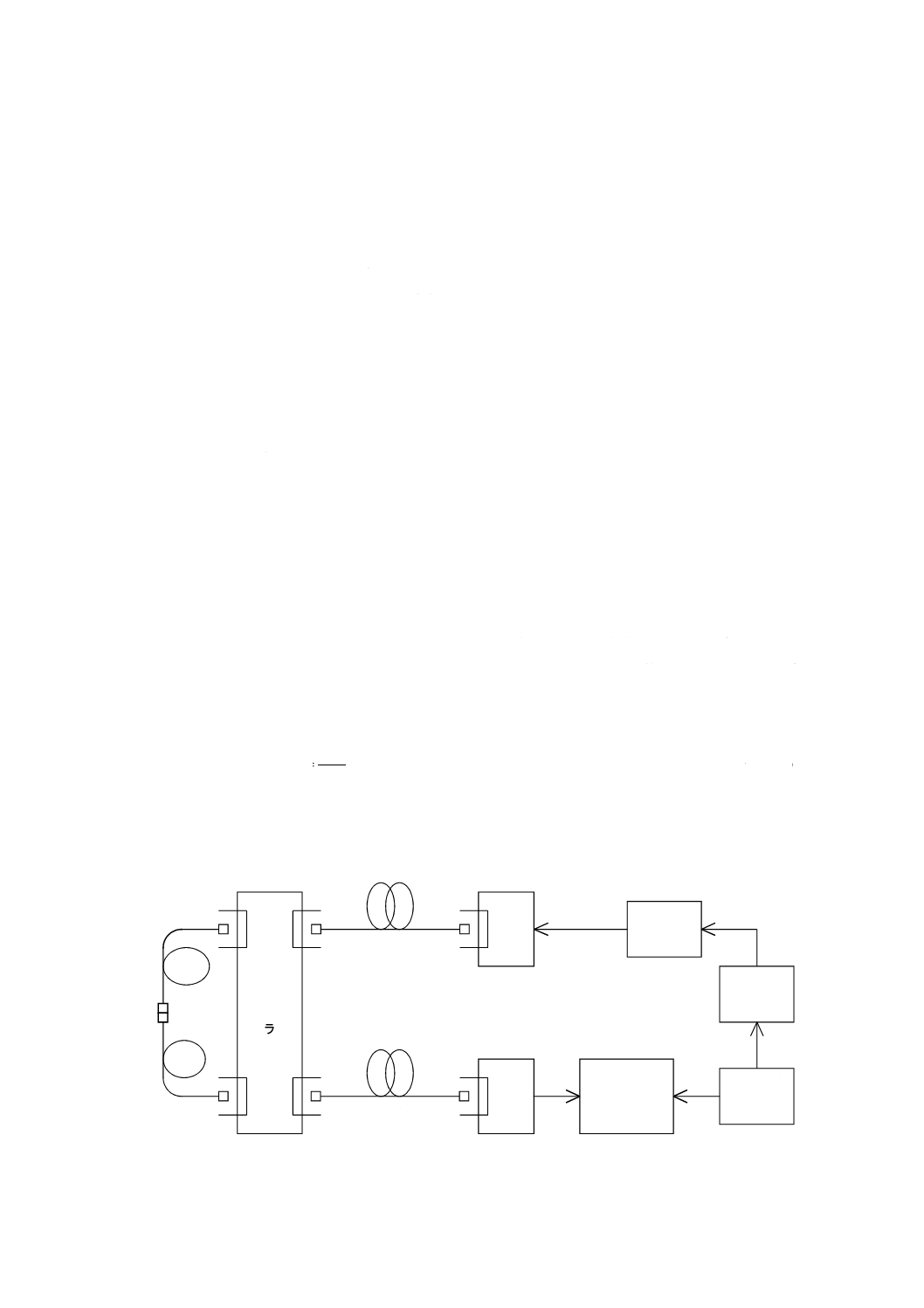
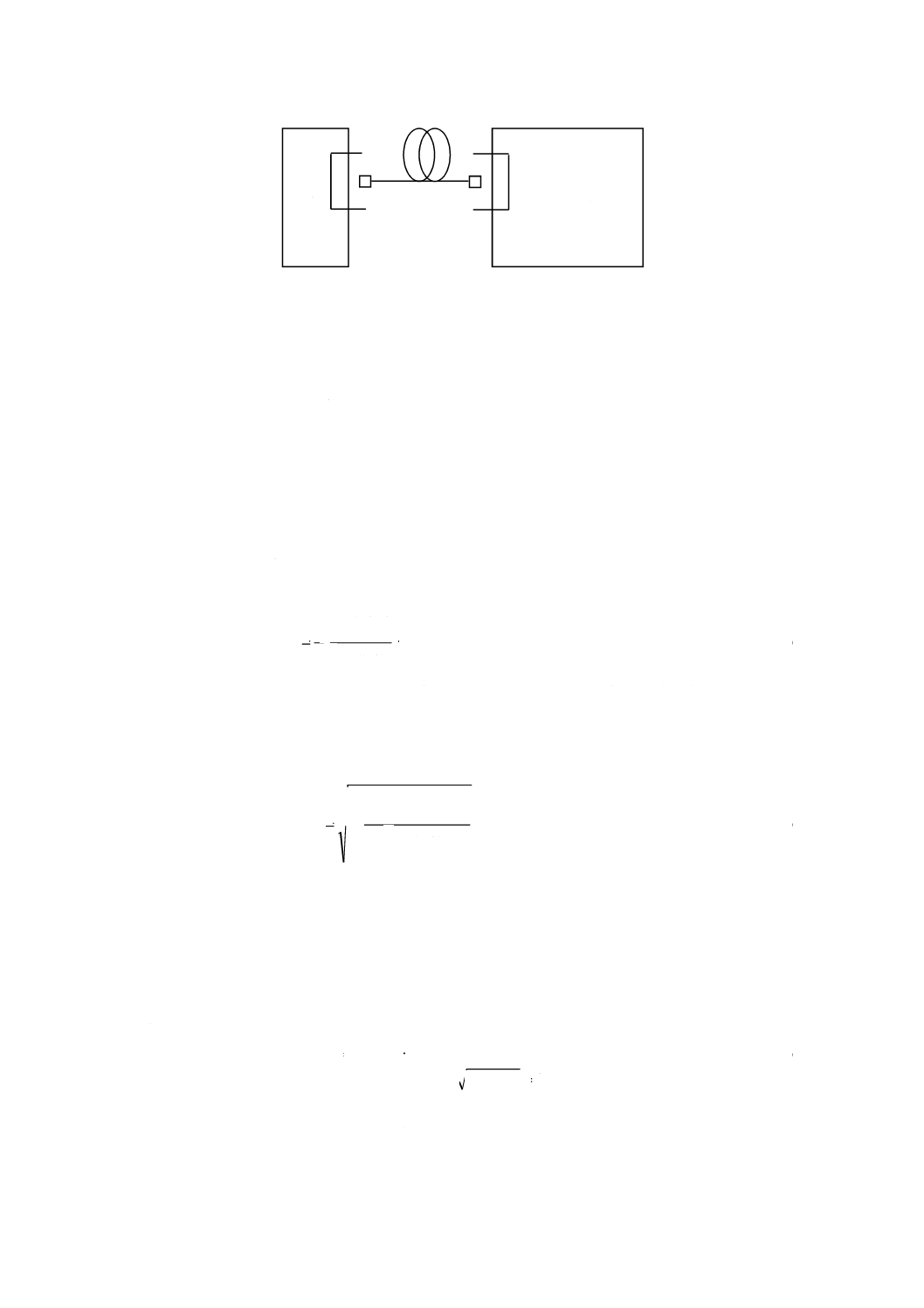
伝搬時間tcalを測定する測定系の一例を,図3に示す。測定手順は,次による。
− デジタルディレイ発生器の遅延時間をゼロに設定する。
− タイムインターバルカウンタに表示された試験系の伝搬遅延時間tcalを記録する。
デジタル
ディレイ
発生器
光
カ
プラ
光ファイバF3
パルス
発生器
タイミング
パルス
発生器
タイム
インターバル
カウンタ
光
フ
ァ
イ
バ
受
光
器
光ファイバF2
F4
F1
光
源
E2
E1
図3−試験系の伝搬時間tcalの測定系の一例
10
C 6185-1:2017
3) 式(20)及び式(21)によって,それぞれの設定遅延時間tdsに対する実測値の平均lst(s)及び標準偏差
uls(s)を算出する。
∑
=
=
M
i
i
t
M
t
1
,ls
ls
1
········································································· (20)
(
)
∑
=
−
−
=
M
i
it
t
M
u
1
2
ls
,
ls
ls
1
1
·························································· (21)
4) デジタルディレイ発生器の遅延時間をtdlに設定して,2)〜3)と同様な測定を実施する。i回目の測定
値をdl,i(m)とし,式(22)によって遅延時間tll,i(s)を算出する。ただし,デジタルディレイ発生器
の遅延時間をゼロに設定したときの試験系の伝搬時間tcalはtdlに含まれていないものとする。
i
i
d
c
N
t
,l
g
,ll
2
=
··········································································· (22)
5) 式(23)及び式(24)によって,それぞれの設定遅延時間tdlに対する実測値の平均llt(s)及び標準偏差
ull(s)を算出する。
∑
=
=
M
i
i
t
M
t
1
,ll
ll
1
·········································································· (23)
(
)
∑
=
−
−
=
M
i
it
t
M
u
1
2
ll
,ll
ll
1
1
··························································· (24)
6) 実測値の平均lst及び式lltを式(25)及び式(26)に代入し,距離オフセットLofs及び距離スケール偏差
εscaleを算出する。
ds
dl
cal
ls
ll
ds
ll
dl
ls
g
ofs
)
(
2
t
t
t
t
t
t
t
t
t
N
c
L
−
−
−
−
×
=
·············································· (25)
1
ds
dl
ls
ll
scale
−
−
−
=
t
t
t
t
ε
······································································ (26)
7) 標準試験条件におけるLofsの不確かさuLl及びεscaleの不確かさuslを,3)及び5)で算出した測定値の
ばらつきの標準偏差の値uls及びullを用いて,それぞれ式(27)及び式(28)によって算出する。
2
0,
dly
2
ds
dl
2
2
cal
sd
2
ls
2
cal
dl
g
Ll
)
(
)
(
)
(
2
u
t
t
M
u
t
t
u
t
t
N
c
u
ll+
−
+
+
+
×
=
······························· (27)
2
ds
dl
2
l
dly,
2
ll
2
ls
ls
)
(
t
t
M
u
M
u
u
u
−
+
+
=
······························································ (28)
ここに,
uLl: 標準試験条件におけるLofsの不確かさ(m)
uls: ばらつきの標準偏差(m/m)
udly,0: デジタルディレイ発生器の遅延時間の不確かさ(遅延時間を
ゼロに設定した場合)(m)
udly,l: デジタルディレイ発生器の遅延時間の不確かさ(遅延時間を
tdlに設定した場合)
8) 式(8)から,距離測定値のばらつきに伴う標準不確かさuLto(m)は,式(29)となる。
2
tq
2
ls
Lto
u
u
u
+
=
········································································ (29)
11
C 6185-1:2017
なお,量子化誤差utq(m)は,サンプリング距離Lsmpから式(30)によって算出する。
3
2
smp
tq
L
u=
·············································································· (30)
6.5
動作条件における距離の不確かさ及び確度の試験
6.5.1
動作条件における距離の不確かさ及び確度の要因
動作条件において距離オフセット及び距離スケール偏差の不確かさに寄与する要因として,温度依存特
性を考える。距離オフセットに対する不確かさは短い距離(遅延時間)での測定によって求め,距離スケ
ール偏差に対する不確かさは長い距離(遅延時間)での測定によって求める。
6.5.2
温度依存特性
試験系は,図2の試験系の被試験器だけを恒温槽に入れた構成とする。
温度依存特性の試験における装置及び試験手順は,次による。
a) 装置 装置は,6.4 a)による。
b) 試験手順
1) 標準試験条件並びに製造業者が設定した使用温度の上限及び下限を含めた5点以上の試験温度Ti(i
=1,2,…)を設定する。
2) 試験系の伝搬遅延時間を,標準試験条件における試験で設定した短い方の遅延時間t0sに設定し,一
つの試験温度Tiに対して遅延時間をms回測定し,その平均値を
Ti
ts,とする。
3) 全ての試験温度で2)の測定を行った後,式(31)によって,温度依存性による測定値のかたよりΔts,Ti
(s)(i=1,2,…)を算出し,この値を用いて,温度依存性に基づく,距離オフセットの不確かさ
の寄与分uLp,T(m)を,式(32)によって算出する。
なお,測定回数msは,ms≦100の範囲で,測定のばらつきに伴う不確かさ
s
tl/m
u
がuLp,Tに比べ
て十分小さい値となるように設定することが望ましい。
ofs
g
cal
s0
scale
s,
s,
2
)
)(
1(
L
c
N
t
t
ε
t
t
Ti
Ti
×
−
+
+
−
=
∆
····································· (31)
)|
Δ
(|
max
3
1
2
s,
g
T
Lp,
Ti
i
t
N
c
u
×
=
····················································· (32)
4) 次に,試験系の伝搬遅延時間を標準試験条件における試験で設定した長い方の遅延時間t0lに設定し,
一つの試験温度Tiに対して遅延時間をml回測定し,その平均値を
Ti
tl,とする。
5) 全ての試験温度で4)の測定を行った後,式(33)によって,距離スケール偏差の温度依存性に伴うか
たよりΔεTi(i=1,2,…)を算出し,この値を用いて,温度依存性に基づく,距離スケール偏差の
不確かさの寄与分usp,Tを,式(34)によって算出する。
なお,測定回数mlは,ml≦100の範囲で,測定のばらつきに伴う不確かさ
l
tl/m
u
がusp,Tに比べて
十分小さい値となるように設定することが望ましい。
)
1(
Δ
scale
0s
0l
s,
l,
ε
t
t
t
t
ε
Ti
Ti
Ti
+
−
−
−
=
·························································· (33)
)|
Δ
(|
max
3
1
T
p,
s
Ti
i
ε
u
=
······························································· (34)
12
C 6185-1:2017
7
損失の不確かさ及び確度の試験
7.1
損失の不確かさ及び確度の試験の概要
損失の不確かさを決める要因は,標準試験条件下での被試験器固有のかたより及び測定の不確かさ並び
に動作条件(温度依存性,直線性及び距離依存性)に依存した不確かさである。前者を標準試験条件にお
ける損失の不確かさ及び確度の試験で求め,後者を動作条件における損失の不確かさ及び確度の試験で求
める。損失の不確かさは,各試験の結果を式(1)及び式(2)に代入して算出する。また,試験結果を式(3)に代
入することによって,被試験器に対する確度(動作誤差の限界)を求めることができる。
7.2
標準試験条件における損失の不確かさ及び確度の試験
図4に標準試験条件における損失の不確かさ及び確度の試験の試験系を示す。図4による試験に先立ち,
図5の測定系で減衰量の設定を行う。
デジタル
ディレイ
発生器
光
カ
プラ
光ファイバ
パルス
発生器
受
光
器
光
源
被
試
験
器
光ファイバ
光ファイバ
可
変
光
減
衰
器
1
光ファイバ
可
変
光
減
衰
器
2
光ファイバ
図4−標準試験条件における損失の不確かさ及び確度の試験の試験系
光パワー
メータ
光
源
光ファイバ
可
変
光
減
衰
器
1
光ファイバ
図5−減衰量の設定に用いる測定系
標準試験条件における損失の不確かさ及び確度の試験における装置及び試験手順は,次による。
a) 装置
1) 光源,受光器,光カプラ,パルス発生器,デジタルディレイ発生器及び光ファイバ 6.4 a)による。
2) 可変光減衰器 光パワーの試験範囲内で光パワーが可変な可変光減衰器を用いる。減衰量の波長依
存性及び偏光依存性が十分小さいものを用いる。
3) 光パワーメータ 観測する光パルスに対して十分な感度をもち,連続パルス光の平均パワーを測定
できるものを用いる。
b) 試験手順
1) 図5の測定系の可変光減衰器1で設定値に4 dB(被試験器のディスプレイ画面上では2 dB)の差が
ある二つの目盛を設定し,それぞれ,光パワーAL(低設定の場合)及びAH(高設定の場合)を測定
13
C 6185-1:2017
する。ただし,AL及びAHは共に対数表示でなく線形表示でAL>AHとする。式(35)によって,レベ
ル差Aを算出する(Aの意味は被試験器のディスプレイ画面上でのALとAHとのレベル差に相当す
る。)。
H
L
A
A
A=
··············································································· (35)
2) 1)の測定を10回以上繰り返し,Aの平均値A0及び相対標準偏差ualossを,それぞれ式(36)及び式(37)
によって算出する。
∑
=
×
=
m
i
iA
m
A
1
0
1
········································································ (36)
(
)
0
1
2
0
aloss
100
1
A
m
A
A
u
m
i
i
×
−
−
=∑
=
························································ (37)
ここに, ualoss: 相対標準偏差(%)
Ai: i回目の測定結果から算出したAの値(%)
m: 測定回数
3) 図4の試験系の可変光減衰器1を低設定とし,可変光減衰器2を用いて再生パルス波形が被試験器
のディスプレイ画面のほぼ中央部に表示されるようにする。
4) 被試験器のカーソルを用いて,再生パルス波形のピーク値のレベルを測定する。このときのレベル
をPL(線形表示)とする。
5) 可変光減衰器1を高設定とし,再生パルス波形のピーク値のレベルを測定する。このときのレベル
をPH(線形表示)とする。
6) 式(38)によって,PLとPHとの比pを算出する。
H
L
P
P
p=
·················································································· (38)
7) 3)〜6)の測定を10回以上繰り返して行う。i回目の測定結果から算出したpの値をpiとする。
8) 損失についての標準試験条件における被試験器のかたよりDlto及び標準不確かさultoを,それぞれ,
式(39)及び式(40)によって算出する。
100
0
0
0
lto
×
−
=
A
A
p
D
··································································· (39)
2
aloss
2
oloss
lto
u
u
u
+
=
··································································· (40)
ここに, Dlto: 標準試験条件における被試験器のかたより(%)
ulto: 標準試験条件における被試験器の標準不確かさ(%)
p0: m回の繰返し測定の結果から算出したpiの平均値(%)
∑
=
×
=
m
i
ip
m
p
1
0
1
uoloss: 標準試験条件での試験における測定値のばらつきの相対標準
偏差(%)
(
)
0
1
2
0
oloss
100
1
p
m
p
p
u
m
i
i
×
−
−
=∑
=
注記 OTDR装置の光パワーレベル(dB単位)は,実際の光パワーレベルの1/2のスケールで表示さ
14
C 6185-1:2017
れる。このため,式(38)のpの値が,被試験器による式(35)のAの値の測定値となる。
7.3
動作条件における損失の不確かさ及び確度の試験
7.3.1
動作条件における損失の不確かさ及び確度の要因
動作条件において損失の不確かさ及び確度に寄与する要因として,次の3項目による不確かさを考える。
なお,測定値のばらつきに伴う不確かさが試験の結果に与える影響を抑えるため,必要がある場合,測
定値の平均化によって不確かさを低減させる処置をとる。
a) 温度依存特性
b) 直線性
c) 距離(時間)依存特性
7.3.2
温度依存特性
試験系は,図4の試験系において被試験器だけを恒温槽に入れた構成とする。
温度依存特性の試験における装置及び試験手順は,次による。
a) 装置 装置は,7.2 a)による。
b) 試験手順
1) 標準試験条件並びに製造業者が設定した使用温度の上限及び下限を含めた5点以上の試験温度Tiで,
7.2 b)の3)〜6)と同様の測定をmT回繰り返してpの値を取得し,その平均を
Ti
pとする。
2) 各温度での測定結果の偏差doloss,Ti(%)(i=1,2,…)を式(41)によって算出し,温度依存特性に伴
う不確かさの寄与ulti,T(%)は,式(42)によって算出する。
100
0
0
,
oloss
×
−
=
p
p
p
d
Ti
Ti
······························································· (41)
)|
(|
max
3
1
,
oloss
T
lti,
Ti
i
d
u
=
···························································· (42)
なお,繰返し回数mTは,mT≦100の範囲で,
Ti
pの測定のばらつきに伴う不確かさ
T
oloss/m
u
が,
不確かさの寄与ulti,Tに比べて十分小さくなるように設定する。
7.3.3
直線性
試験系は,図4による。
直線性の試験における装置及び試験手順は,次による。
a) 装置 装置は,7.2 a)による。
b) 試験手順
1) 標準試験条件並びに製造業者が設定した損失範囲の上限及び下限を含めた5点以上の損失値(Li)
で,7.2 b)の3)〜6)と同様の測定をmL回繰り返してpの値を取得し,その平均を
Li
pとする。損失
値は可変光減衰器2を用いて調節する。ただし,被試験器の雑音レベルよりも8 dB高いレベルまで
行う。
2) 各損失値での測定結果の偏差doloss,Li(%)(i=1,2,…)を式(43)によって算出し,直線性に伴う不
確かさの寄与ulti,L(%)は,式(44)によって算出する。
100
0
0
,
oloss
×
−
=
p
p
p
d
Li
Li
······························································ (43)
)|
(|
max
3
1
,
oloss
L
lti,
Li
i
d
u
=
···························································· (44)
なお,繰返し回数mLは,mL≦100の範囲で,
Li
pの測定のばらつきに伴う不確かさ
L
oloss/m
u
が,
15
C 6185-1:2017
不確かさの寄与ulti,Lに比べて十分小さくなるように設定する。
7.3.4
距離(時間)依存特性
試験系は,図4による。
距離(時間)依存特性の試験における装置及び試験手順は,次による。
a) 装置 装置は,7.2 a)による。
b) 試験手順
1) 標準試験条件並びに製造業者が設定した測定距離範囲の上限及び下限(ただし,デッドゾーン部分
は除く。)を含めた5点以上の距離(Di)で,7.2 b)の3)〜6)と同様の測定をmD回繰り返してpの値
を取得し,その平均を
Di
pとする。距離はデジタルディレイ発生器を用いて調節する。
2) 各距離での測定結果の偏差doloss,Di(%)(i=1,2,…)を式(45)によって算出し,距離(時間)依存
特性に伴う不確かさの寄与ulti,D(%)は,式(46)によって算出する。
100
0
0
,
oloss
×
−
=
p
p
p
d
Di
Di
······························································ (45)
)|
(|
max
3
1
,
oloss
D
lti,
Di
i
d
u
=
···························································· (46)
なお,繰返し回数mDは,mD≦100の範囲で,
Di
pの測定のばらつきに伴う不確かさ
D
oloss/m
u
が,
不確かさの寄与ulti,Dに比べて十分小さくなるように設定する。
7.4
損失不確かさの合成
7.2及び7.3で算出した損失の不確かさを式(1)に代入し,式(47)によって,合成損失不確かさult(%)を
算出する。
2
D
lti,
2
L
lti,
2
T
lti,
2
lto
lt
u
u
u
u
u
+
+
+
=
······················································· (47)
7.5
確度
損失のかたより及び不確かさの算出結果を式(3)に代入し,式(48)によって,損失の確度を規定する誤差
の上限εltu(%)及び下限εltl(%)を算出する。
2
D
lti,
2
L
lti,
2
T
lti,
2
lto
lto
lt
lto
ltl
ltu
u
u
u
u
k
D
u
k
D
ε
ε
+
+
+
±
=
±
=
·························· (48)
注記1 包含係数kの値は,求める確度の信頼の水準に応じて適切に選択するとともに,その値を明
記する。
注記2 かたよりDltoは,各被試験器ごとに固有の値をもつ。Dltoを被試験器ごとのばらつきとみなし,
同一OTDR製品群の仕様値として損失確度を評価する場合は,式(A.14)又は式(A.15)の定義に
よって誤差の限界値を算出してもよい。ただし,対象となるOTDR製品の台数が少なく,製
品ごとのDltoの分布を精度良く求められない場合は,評価結果が不正確となる可能性がある
ため,十分な注意が必要である。
8
反射率の不確かさ及び確度の試験
8.1
反射率の不確かさ及び確度の試験の概要
OTDR装置による反射率(反射減衰量)測定では,レイリー後方散乱光レベルを基準とした反射率に,
後方散乱光反射率を乗じた値を反射率として表示する。後方散乱光反射率は光ファイバごとに異なるが,
OTDR装置でこれを個別に評価できないため,測定では,あらかじめプリセットした後方散乱光反射率の
16
C 6185-1:2017
値を用いる。そこで,光ファイバ個々の後方散乱光反射率の差異に伴うかたより及び不確かさは,反射率
の不確かさ及び確度の試験による評価の対象とはせず,これ以外の要因に伴う反射率の不確かさ及び確度
を評価の対象とする。
反射率の不確かさを決める要因は,標準試験条件下での被試験器固有のかたより及び測定の不確かさ並
びに動作条件(温度依存性及び直線性)に依存した不確かさである。前者を標準試験条件における反射率
の不確かさ及び確度の試験で求め,後者を動作条件における損失の不確かさ及び確度の試験で求める。反
射率の不確かさは,各試験の結果を式(1)及び式(2)に代入して算出する。また,試験結果を式(3)に代入する
ことによって,被試験器に対する確度(動作誤差の限界)を求めることができる。
8.2
標準試験条件における反射率の不確かさ及び確度の試験
図6に,標準試験条件における反射率の不確かさ及び確度の試験の試験系を示す。
可
変
光
減
衰
器
被
試
験
器
光ファイバF2
基
準
光
反
射
器
光ファイバF1
図6−標準試験条件における反射率の不確かさ及び確度の試験の試験系
標準試験条件における反射率の不確かさ及び確度の試験における装置及び試験手順は,次による。
a) 装置
1) 基準光反射器 反射率の波長依存性及び偏光依存性が小さく,反射率及びその不確かさが既知であ
るものを用いる。
2) 可変光減衰器 試験系の反射率の調整に用いる。光パワーの試験範囲内で光パワーが可変な可変減
衰器を用いる。減衰量の波長依存性及び偏光依存性が十分小さいものを用いる。
3) 光ファイバ 種類は,表1から選択する。各光ファイバは,同じ種類であり,試験条件における後
方散乱光反射率Rbs及びその不確かさが既知であり,その長さは,OTDR装置を用いて接続損失を
測定するのに十分なものとする。
なお,附属書Bに光ファイバの後方散乱光反射率の測定方法を示す。
b) 試験手順
1) 図6の可変光減衰器の両端に光ファイバF1及びF2と同じ種類の光コード(長さ2 m)を接続し,
JIS C 6823の挿入損失法の手順に従って,その減衰量を最小にした場合の損失α0(dB)を測定する。
この測定を10回以上繰り返し,i回目の測定結果をα0,i(dB)として,式(49)及び式(50)によってそ
の測定値α0及び測定のばらつきに伴う百分率不確かさuαA(%)を算出する。
−
=
∑
=
−
m
i
αi
m
α
1
10
0
,0
10
1
log
10
························································ (49)
100
1
10
1
1
1
)
(
A
2]
[
0
,0
×
−
−
=
∑
=
−
−
m
i
α
i
m
u
α
α
············································ (50)
ここに,
m: 測定回数
また,可変光減衰器の減衰量の指示値をAに設定したときの損失α(A)(dB)を,複数の指示値に
17
C 6185-1:2017
対して測定しておく。
なお,測定のための光源には,被試験器の光パルスと同一の中心波長をもち,出力光パワーが安
定した連続光源を用いる。
2) 図6の被試験器に代えて,距離及び損失が校正されたOTDR装置を接続した試験系を構成し,可変
光減衰器の減衰量を最小にして後方散乱光波形を観測し,光減衰器入射端(図7のA点)の後方散
乱光レベルと基準光反射器の入射端(図7のB点)における後方散乱光レベルとの差H2を測定す
る。
3) 図6の試験系に被試験器を接続し,基準光反射器のフレネル反射光パルスの波形が飽和しないよう
に可変光減衰器の指示値を調整した後,被試験器によって,後方散乱光波形を観測する。このとき
の指示値をArとし,光ファイバF1の遠端(図7の位置A)の後方散乱光レベルに対する,基準光
反射器のフレネル反射光パルス(図7の位置C)のレベルの差H(dB)を測定する。線形表示によ
る反射率の測定値Rは,式(51)によって算出する。
−
×
=
−
+
+
1
10
5
)
(
2
F
bs,
0
r
2
α
αA
H
H
R
R
···················································· (51)
ここに, Rbs,F2: 光ファイバF2の後方散乱光反射率
光ファイバ
F1
H
A
C
光ファイバ
F2
H2
B
図7−試験系によって観測される後方散乱光波形
4) 3)の測定を10回以上繰り返し,i回目の測定で得た反射率をRi(i=1,2,…)として,式(52)及び
式(53)によって,その測定値Rmeas及び測定のばらつきに伴う百分率不確かさuRsd(%)を算出する。
∑
=
=
m
i
iR
m
R
1
meas
1
······································································· (52)
meas
1
2
meas
sd
R
100
)
(
1
1
R
R
R
m
u
m
i
i
×
−
−
=
∑
=
············································· (53)
ここに,
m: 測定回数
反射率についての測定値の百分率かたよりDRto(%)及び不確かさuRto(%)は,それぞれ式(54)及
び式(55)によって算出する。ただし,測定値は全て対数表示でなく線形表示とする。
100
std
std
meas
Rto
×
−
=
R
R
R
D
····························································· (54)
2
A
2
lt
2
Rstd
2
Rsd
Rto
)
2(2
)
2(2
α
u
u
u
u
u
+
+
+
=
········································· (55)
ここに, uRstd: 基準光反射器の反射率の不確かさ(%)
18
C 6185-1:2017
ult: OTDR装置の損失不確かさ(%)
注記1 基準光反射器として,光サーキュレータ又は光カプラと光アイソレータとの組合せを介して
入射光パルスを反射させずに折り返す構成を用いることができる。この場合,戻り光パルス
に後方散乱光が重畳しないことがある。このときは,次の式(56)によって反射率を算出する。
5
)
(
2
F
bs
0
r
2
10
α
A
α
H
H
,
R
R
−
+
+
×
=
··························································· (56)
注記2 OTDR装置の光パワーレベル(dB単位)は,実際の光パワーレベルの1/2のスケールで表示
される。このため,式(55)において,反射率不確かさに対するH及びH2の不確かさの寄与分
は,それぞれ2ultとなる。また,α(Ar)及びα0の不確かさの寄与分は,それぞれ2uαAとなる。
8.3
動作条件における反射率の不確かさ及び確度の試験
8.3.1
動作条件における反射率の不確かさ及び確度の要因
動作条件において反射率の不確かさ及び確度に寄与する要因として,次の2項目による不確かさを考え
る。
なお,測定値のばらつきに伴う不確かさが試験の結果に与える影響を抑えるため,必要がある場合,測
定値の平均化によって不確かさを低減させる処置をとる。
a) 温度依存特性
b) 直線性
8.3.2
温度依存特性
試験系は,図6の試験系で被試験器だけを恒温槽に入れた構成とする。
温度依存特性の試験における装置及び試験手順は,次による。
a) 装置 装置は,8.2 a)による。
b) 試験手順
1) 標準試験条件並びに製造業者が設定した使用温度の上限及び下限を含めた5点以上の試験温度Tiで,
8.2 b)の1)〜3)と同様の測定をmT回繰り返してRの値を取得し,その平均を
Ti
Rとする。
2) 各温度での測定結果の偏差dorflc,Ti(%)を式(57)によって算出し,温度依存特性に伴う不確かさの寄
与uRti,T(%)を式(58)によって算出する。
100
meas
meas
,
orflc
×
−
=
R
R
R
d
Ti
Ti
···························································· (57)
)|
(|
max
3
1
,
orflc
T
Rti,
Ti
i
d
u
=
··························································· (58)
なお,繰返し回数mTは,mT≦100の範囲で,
Ti
Rの測定のばらつきに伴う不確かさ
T
Rsd/m
u
が,不
確かさの寄与uRti,Tに比べて十分小さくなるように設定する。
8.3.3
直線性
試験系は,図6による。
直線性の試験における装置及び試験手順は,次による。
a) 装置 装置は,8.2 a)による。
b) 試験手順
1) 基準光反射器の反射光パルスのピークレベルが,被試験器の飽和レベルよりも3 dB低いレベル(上
限),雑音レベルに対して8 dB高いレベル(下限),及び標準試験条件で測定したレベルを含む5
点以上の異なるレベルとなるような光減衰器の指示値Aiを設定し,各設定値に対して8.2 b)の1)〜
19
C 6185-1:2017
3)と同様の測定をmA回繰り返してRの値を取得し,その平均を
i
A
Rとする。
2) 各指示値での測定結果の偏差dorflc,Ai(%)(i=1,2,…)を式(59)によって算出し,直線性に伴う不
確かさの寄与uRti,A(%)を式(60)によって算出する。
100
meas
meas
,
orflc
×
−
=
R
R
R
d
Ai
Ai
···························································· (59)
)|
(|
max
3
1
,
orflc
A
Rti,
Ai
i
d
u
=
··························································· (60)
なお,繰返し回数mAは,mA≦100の範囲で,
i
A
Rの測定のばらつきに伴う不確かさ
A
Rsd/m
u
が,
不確かさの寄与uRti,Aに比べて十分小さくなるように設定する。
8.4
反射率不確かさの合成
8.2及び8.3で算出した反射率の不確かさを式(1)に代入し,式(61)によって,合成反射率不確かさuRt(%)
を算出する。
2
A
Rti,
2
T
Rti,
2
Rto
Rt
u
u
u
u
+
+
=
···························································· (61)
8.5
確度
反射率のかたより及び不確かさの算出結果を式(3)に代入し,式(62)によって,反射率の確度を規定する
誤差の上限εRtu(%)及び下限εRtl(%)を算出する。
2
R
Rti,
2
T
Rti,
2
Rto
Rto
Rt
Rto
Rtl
Rtu
u
u
u
k
D
u
k
D
ε
ε
+
+
±
=
±
=
···························· (62)
注記1 包含係数kの値は,求める確度の信頼の水準に応じて適切に選択するとともに,その値を明
記する。
注記2 かたよりDRtoは,各被試験器ごとに固有の値をもつ。DRtoを被試験器ごとのばらつきとみな
し,同一OTDR製品群の仕様値として反射率確度を評価する場合は,式(A.14)又は式(A.15)
の定義によって誤差の限界値を算出してもよい。ただし,対象となるOTDR製品の台数が少
なく,製品ごとのDRtoの分布を精度良く求められない場合は,評価結果が不正確となる可能
性があるため,十分な注意が必要である。
9
その他の性能試験
9.1
試験の概要
距離,損失及び反射率に対する不確かさ及び確度の試験とは別に,光パルス幅,光出力レベル,中心光
波長,光スペクトル幅及びダイナミックレンジの各試験を行って被試験器を評価する。
なお,これらの試験においては,試験対象となる物理量の測定だけを行い,それらの不確かさ及び確度
を評価することはしない。
9.2
光パルス幅及び光出力レベル
図8に光パルス幅の試験系を示す。図9に平均光出力の試験系を示す。試験は,標準試験条件で行う。
なお,光出力レベルはピーク値で評価する。
20
C 6185-1:2017
受光器
被試験器
光ファイバ
オシロスコープ
図8−光パルス幅の試験系
光パワー
メータ
被試験器
光ファイバ
図9−平均光出力の試験系
光パルス幅及び光出力レベル試験における装置及び試験手順は,次による。
a) 装置
1) 光ファイバ 種類は,表1から選択する。また,長さは,2 m〜10 mとする。
2) 受光器 観測する光パルスに対して十分な感度及び広い帯域をもつものを用いる。
3) オシロスコープ 観測する光パルス波形に対して十分広い帯域をもつものを用いる。
4) 光パワーメータ 観測する光パルスに対して十分な感度をもち,連続パルス光の平均パワーを測定
できるものを用いる。
b) 試験手順
1) 図8の試験系で,光出力が0の場合の出力電圧が0となるようにオシロスコープのオフセットを調
整する。
2) 被試験器を動作させ,受光器に入射する光パルス波形をオシロスコープで観測し,その半値全幅
(FWHM)を求め,これを光パルス幅Wとする。
3) 複数の光パルス波形がオシロスコープに表示されるように時間軸スケールを調整し,観測された波
形からパルス繰返し周期Tを求める。
4) 図9の試験系で被試験器を動作させ,平均光出力Pave(mW)を測定し,式(63)によってピーク光出
力Ppeak(mW)を算出する。
W
T
P
P
×
=
ave
peak
········································································ (63)
5) 測定したパルス幅,パルス繰返し周期及びピーク光出力の値を用いて,JIS C 6802に基づき,クラ
ス分けを判定する。
光パルス幅及び光出力レベルを厳密に評価する場合,又はこれらの不確かさを評価する場合は,附属書
Cを参照。
9.3
中心光波長及び光スペクトル幅
図10に試験系を示す。試験は,標準試験条件で行う。
オシロスコープ
21
C 6185-1:2017
光スペクトラム
アナライザ
被
試
験
器
光ファイバ
図10−中心波長及び光スペクトル幅の試験系
中心光波長及び光スペクトル幅試験における装置及び試験手順は,次による。
a) 装置
1) 光ファイバ 種類は,表1から選択する。また,長さは,2 m〜10 mとする。
2) 光スペクトラムアナライザ スペクトル波形を,一定の波長間隔で読み取った光パワーの値として
出力する機能をもち,測定光パルスのスペクトル幅に比べて,分解能を十分小さく設定可能なもの
を用いる。
b) 試験手順
1) 光スペクトラムアナライザの波長掃引幅を調整し,光パルスのスペクトル全体を画面に表示する。
2) 光スペクトラムアナライザの波長読取間隔を設定分解能の1/10以下となるように設定し,光パルス
のスペクトルを測定する。
3) 中心光波長λp(nm)は,式(64)に示すように,測定データを数値積分することによって算出する。
∫
∫
=
e
s
e
s
d)
(
d
)
(
p
λ
λ
λ
λ
λ
λ
p
λ
λ
λ
p
λ
······································································ (64)
ここに, p(λ): 光波長λにおける光パワーの読取値(mW)
λs: 掃引開始波長(nm)
λe: 掃引終了波長(nm)
4) 光スペクトル幅ΔλRMS(RMS値,二乗平均の平方根)(nm)は,式(65)によって算出する。
∫
∫
−
=
e
s
e
s
d
)
(
d
)
()
(
Δ
2
p
RMS
λ
λ
λ
λ
λ
λ
p
λ
λ
λ
λ
p
λ
······················································ (65)
ここに, p(λ): 光波長λにおける光パワーの読取値(mW)
λs: 掃引開始波長(nm)
λe: 掃引終了波長(nm)
5) 出力光が連続スペクトルの場合,光スペクトルは読み取った半値全幅ΔλFWHM(nm)で表すものと
し,式(66)によって算出する。
なお,光スペクトラムアナライザの波長分解能を光スペクトル幅に比べて十分小さくできない場
合,その旨を記載する。
RMS
FWHM
Δ
Δ
λ
M
λ
=
····································································· (66)
ここに,
M: 係数。
35
.2
2
log
2
2
=
e
を用いる。
9.4
ダイナミックレンジ
図11に試験系を示す。試験は,標準試験条件で行う。
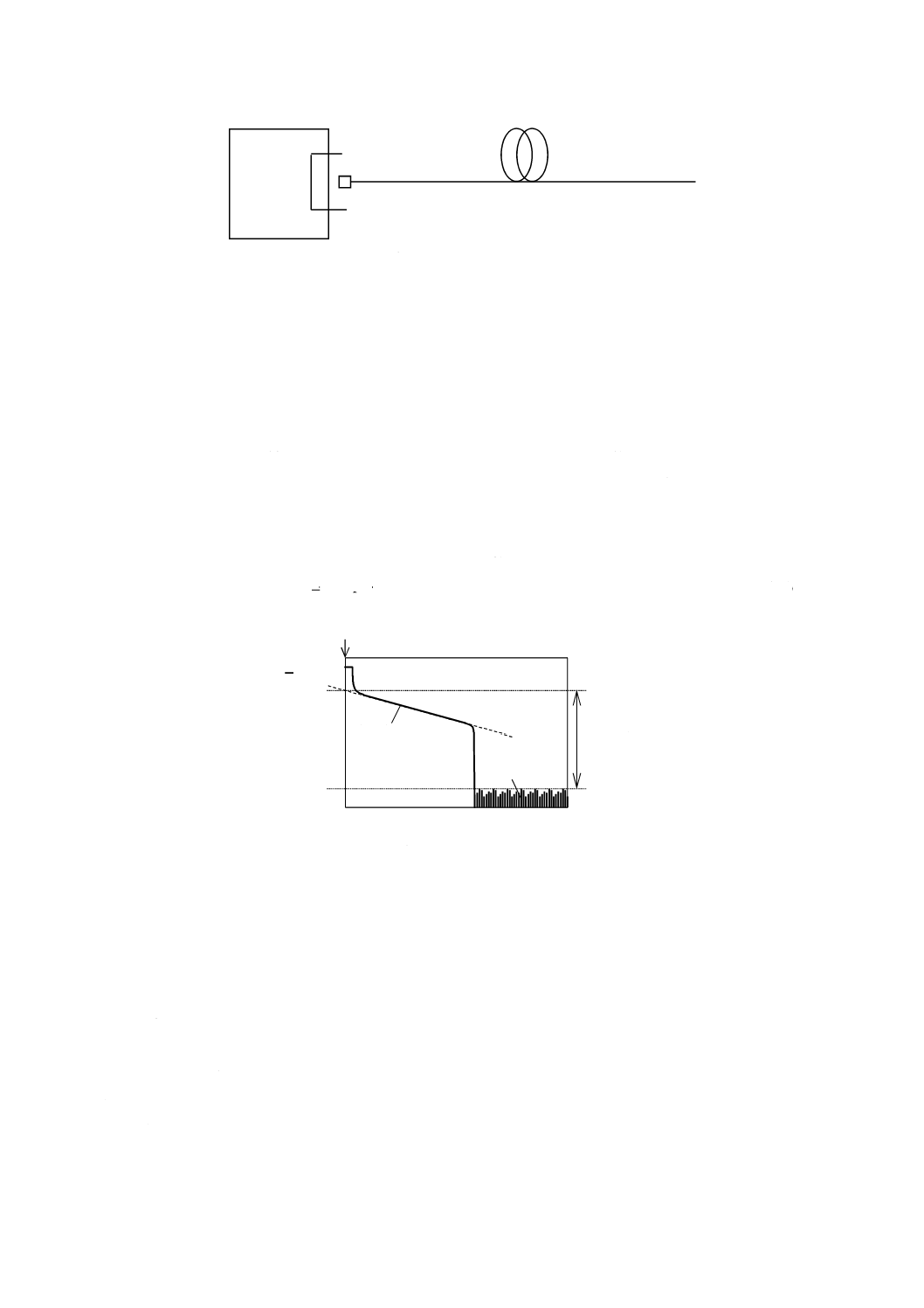
22
C 6185-1:2017
被試験器
光ファイバ
図11−ダイナミックレンジの試験系
ダイナミックレンジ試験における装置及び試験手順は,次による。
a) 装置
1) 光ファイバ 種類は,表1から選択する。長さは,8 km以上とし,その終端部は,無反射終端とす
る。光ファイバに接続が必要な場合は,接続点間での多重反射を避けるために融着接続を用いる。
b) 試験手順
1) 光ファイバ後方散乱波形の全体及び光ファイバの終端部から十分離れた距離での雑音が被試験器に
表示されるように被試験器の距離レンジ,光パワーレンジなどを調整する。
2) 図12に示すように,被試験器に表示された波形から,後方散乱波形の延長線と光パワー軸との交点
のパワーレベルP1(dB)及び光ファイバの終端部から十分離れた点での雑音のピークレベルP2(dB)
を測定する。
3) 式(67)によって,ダイナミックレンジDR(dB)を算出する。
2
1P
P
DR
−
=
··········································································· (67)
後方散乱波形
P2
P1
dB
表
示
光
パ
ワ
ー
雑音
ダイナミック
レンジ
DR
距離 m
P2
P1
光パワー軸
図12−ダイナミックレンジの定義
試験結果には,光ファイバの種類,その後方散乱量,測定波長,光パルス幅及び測定時間を併記する。
光パルス幅は,被試験器で設定可能な全ての値で試験することが望ましい。
9.5
デッドゾーン(空間分解能)
9.5.1
口元デッドゾーン
試験系は,図11と同一とする。試験は,標準試験条件で行う。
口元デッドゾーン試験における装置及び試験手順は,次による。
a) 装置
1) 光ファイバ 種類は,表1から選択する。長さは,2 km以上とする。
b) 試験手順 光出力パワーを入射端付近の測定に適した状態に制御できるものは,そのようにして試験
を行う。
1) 被試験器の群屈折率値を1.460 0に設定する。
表
示
光
パ
ワ
ー
レ
ベ
ル
23
C 6185-1:2017
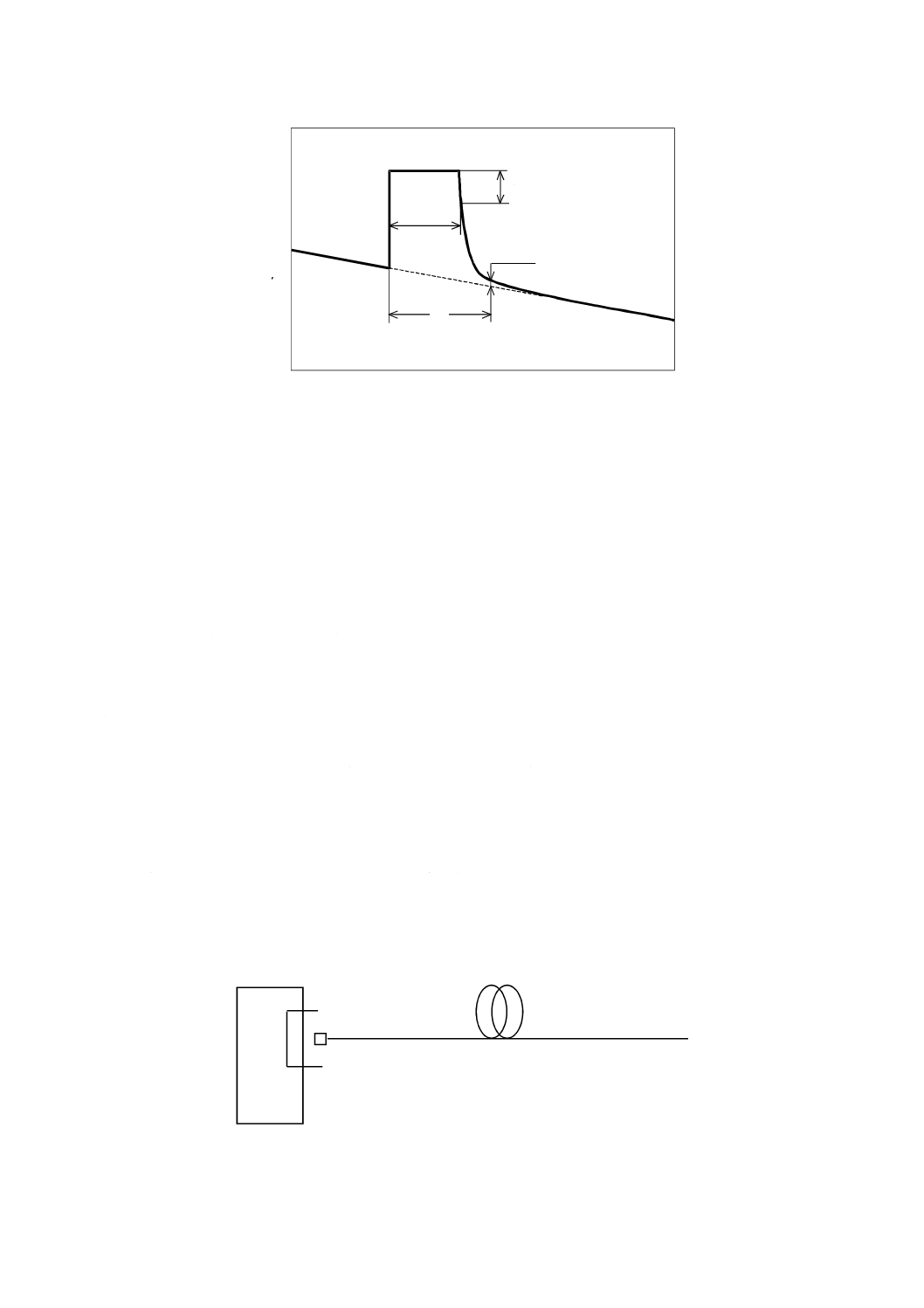
2) デッドゾーンの波形が明瞭に観測できるように被試験器の距離レンジ,光パワーレンジなどを調整
し,観測した波形から,図13の定義に基づき反射測定口元デッドゾーン及び損失測定口元デッドゾ
ーンを求める。
3) 全てのパルス幅について,2)の測定を行う。
1.5 dB
0.5dB
①
②
①:反射測定口元デッドゾーン
②:損失測定口元デッドゾーン
距離m
dB
表
示
光
パ
ワ
ー
図13−口元デッドゾーンの定義
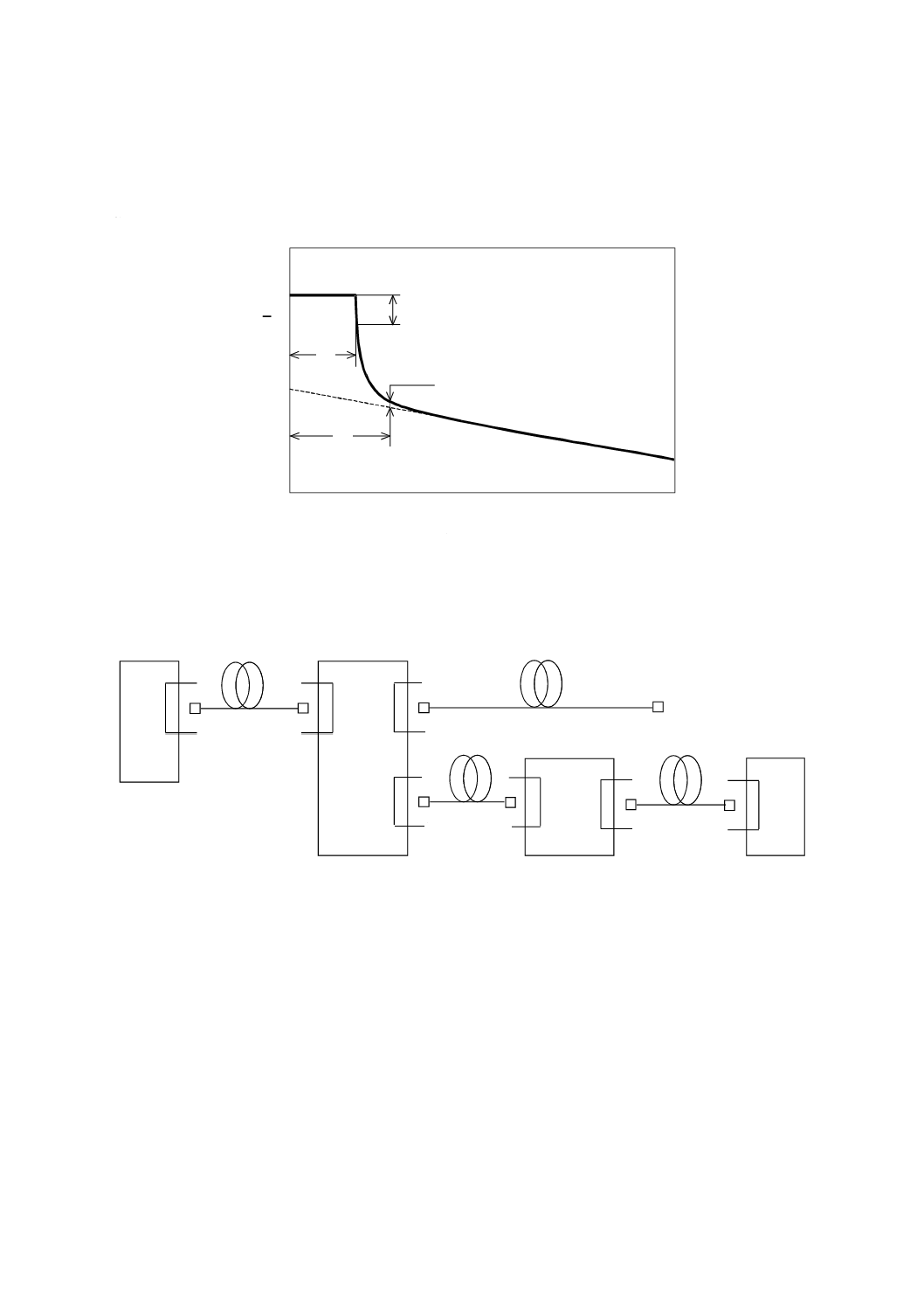
9.5.2
反射点直後のデッドゾーン
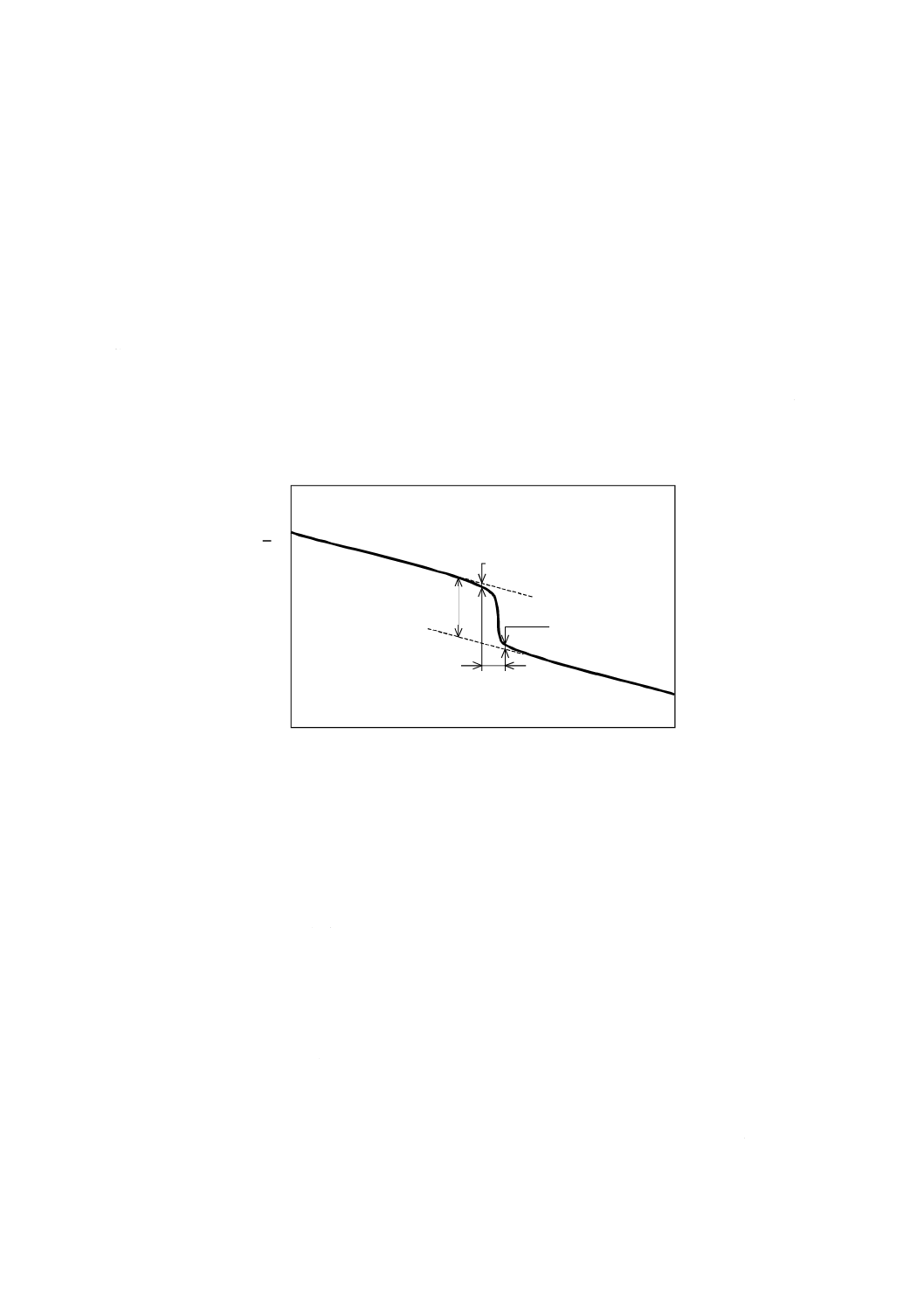
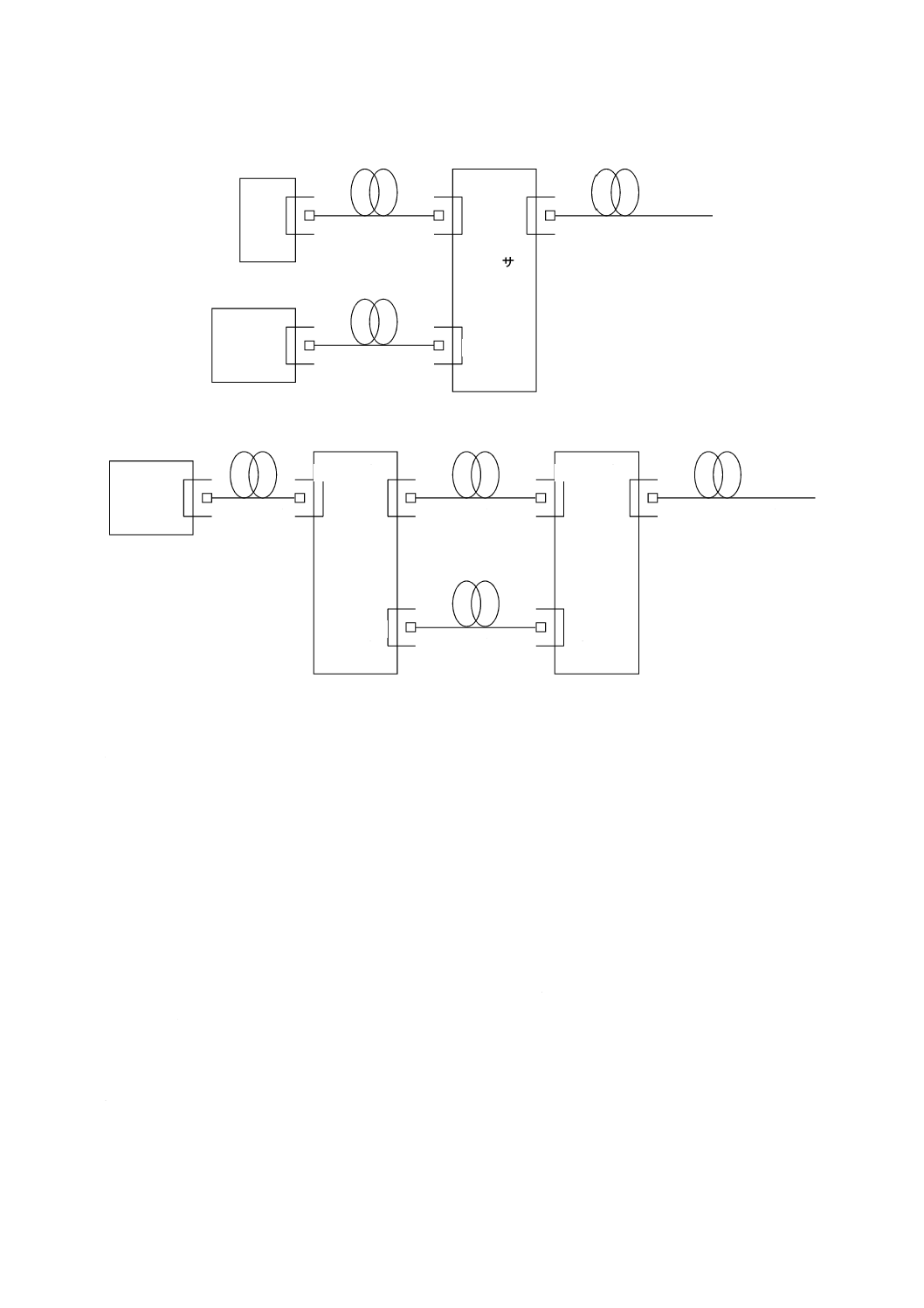
図14に試験系を示す。試験は,標準試験条件で行う。測定では,図15に示すようにデッドゾーンがデ
ィスプレイ画面上で十分判別できるように距離レンジの設定を行う。
可変光
減衰器
光
カ
プ
ラ
光ファイバF1:
2〜10 m
光ファイバF2:
F4の長さ+1km以上
被
試
験
器
光ファイバF3:
高
反
射
率
端
光ファイバF4:
90 %
ポート
10 %
ポート
2〜10 m
1〜5 km
図14−反射点直後のデッドゾーンの試験系
光ファイバF1:
2 m〜10 m
光ファイバF3:
2 m〜10 m
光ファイバF4:
1 km〜5 km
光ファイバF2:
F4の長さ+1 km以上
表
示
光
パ
ワ
ー
レ
ベ
ル
24
C 6185-1:2017
①
②
距離m
dB
①:反射測定デッドゾーン
②:損失測定デッドゾーン
1.5 dB
0.5dB
表
示
光
パ
ワ
ー
図15−反射点直後のデッドゾーンの定義
反射点直後のデッドゾーン試験における装置及び試験手順は,次による。
a) 装置
1) 可変光減衰器 光パワーの試験範囲を可変できる可変減衰器を用いる。減衰量の波長依存性及び偏
光依存性が十分小さいものを用いる。
2) 光ファイバ 種類は,表1から選択する。光ファイバF1及びF3の長さは,2 m〜10 mとする。光
ファイバF4の長さは,1 km〜5 kmとし,F2の長さは,F4の長さよりも1 km以上長くする。
3) 光カプラ 入力された光を分岐又は結合する機能をもつものを用いる。分岐比はおよそ90:10とし,
低波長依存性及び低偏波依存性が必要となる。
4) 高反射率端 反射率はおおむね90 %以上で,反射率の波長依存性及び偏光依存性が小さいものを用
いる。
b) 試験手順
1) 被試験器の群屈折率値を1.460 0に設定する。
2) 可変光減衰器を調整して,反射率−40 dBのフレネル反射光パルスと等価な光パルスを作る。
3) 高反射率端のフレネル反射ピークの波形が明瞭に観測できるように被試験器の距離レンジ,光パワ
ーレンジなどを調整し,観測した波形から,図15の定義に基づき反射測定デッドゾーン及び損失測
定デッドゾーンを求める。
4) 全てのパルス幅について,2)及び3)の測定を行う。
9.5.3
無反射接続点直後の損失測定空間分解能
図16に試験系を示す。試験は,標準試験条件で行う。光ファイバに曲げを与えて無反射接続点と同等の
損失を得る。
被
試
験
器
光ファイバ
図16−無反射接続点直後の損失測定空間分解能の試験系
表
示
光
パ
ワ
ー
レ
ベ
ル
25
C 6185-1:2017
無反射接続点直後の損失測定空間分解能試験における装置及び試験手順は,次による。
a) 装置
1) 光ファイバ 種類は,表1から選択する。長さは,2 km以上で,かつ,被試験器からおおむね1 km
の位置に曲げを与えることができる構造とする。
b) 試験手順
1) 被試験器の群屈折率値を1.460 0に設定する。
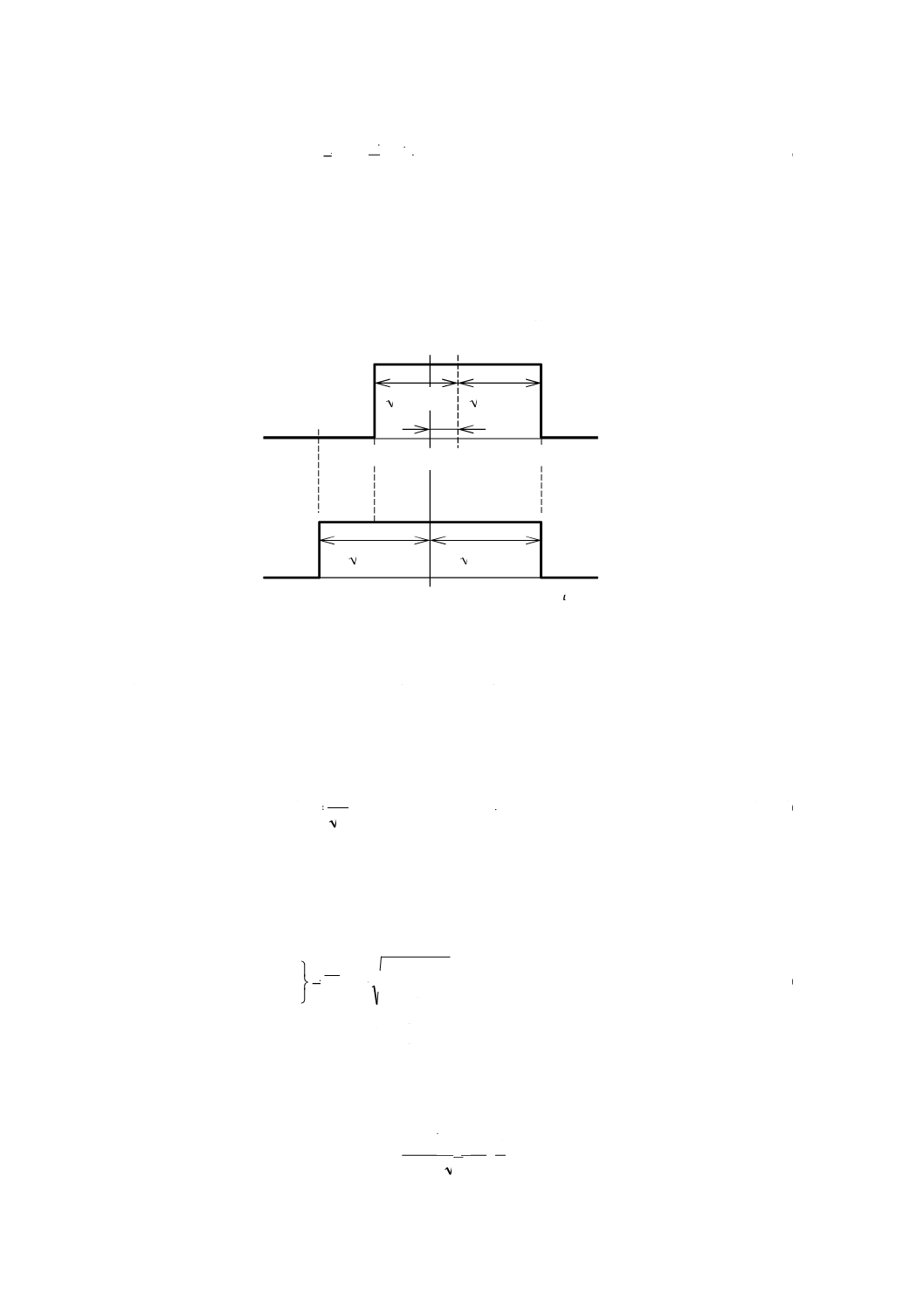
2) 光ファイバに曲げを与えて図17に示すように被試験器ディスプレイ画面上で1 dBの損失が生じる
ようにする。
3) 損失発生部の波形が明瞭に観測できるように被試験器の距離レンジ,光パワーレンジなどを調整し,
観測した波形から,図17の定義に基づき損失測定空間分解能を求める。
4) 全ての光パルス幅について,2)及び3)の測定を行う。ただし,後方散乱光の実測波形の揺らぎなど
によって損失測定空間分解能を求めるのが困難な場合は,当該パルス幅における損失測定空間分解
能は未定義とする。
損失測定
空間分解能
0.1 dB
1
d
B
0.1 dB
距離m
dB
表
示
光
パ
ワ
ー
図17−無反射接続点直後の損失測定空間分解能の定義
10 強度試験
10.1 強度試験の概要
機械的な振動及び衝撃を与えて被試験器の損傷及び特性の変化の有無を試験する。特性の変化は,強度
試験後に6.5の試験を実施し,距離オフセットLofs及び距離スケール偏差εscaleの強度試験前後の変化が,
それぞれの拡張不確かさk uLl及びk usl以内かどうか,また,7.2の試験を実施し,被試験器のかたよりDlto
の強度試験前後の変化が,拡張不確かさk ulto以内かどうかで合否判断することが望ましい。
被試験器が機械的にぜい(脆)弱な構造となっていて,強度試験によって回復不可能となるおそれがあ
る場合には,この試験を省いてもよい。また,被試験器が製品規格によって他の規格又は他の試験の厳し
さを規定している場合は,それに従う。
なお,強度試験は被試験器を包装していない状態で行う。
10.2 振動試験
試験は,JIS C 60068-2-6に従って実施する。
なお,試験の厳しさは,次のとおりとする[JIS C 60068-2-6のC.2(固定振動数耐久試験)を適用する。]。
− 振動数範囲:10 Hz〜55 Hz
表
示
光
パ
ワ
ー
レ
ベ
ル
26
C 6185-1:2017
− 振幅(片振幅):0.15 mm
− 各軸方向の掃引サイクル数:10
10.3 落下試験
試験は,JIS C 60068-2-31の5.1.3.1(面落下)又は5.1.3.2(角落下)に従って実施する。試験の厳しさ
は,次のいずれかによる。
− 面落下:25 mm又は30°の厳しさの小さいほう
− 角落下:25 mm又は30°の厳しさの小さいほう
27
C 6185-1:2017
附属書A
(規定)
不確かさの規定
A.1 一般
この附属書は,測定における不確かさ及びかたよりについて解説するものである。これは,ISO/IEC
Guide 98-3:2008の“計測における不確かさの表現の指針”に基づくが,この附属書は,ISO/IEC Guide
98-3:2008に規定の詳細内容を十分には反映していない。
標準として,測定の不確かさの評価方法について二つのタイプを規定する。タイプAは,同じ測定に対
する一連の繰返し測定を統計的に分析し,不確かさを評価する方法である。タイプBは,他の知識に基づ
いて,不確かさを評価する方法である。
A.2 タイプA評価の不確かさ
タイプA評価の標準不確かさは,同じ測定条件の下で,個別の独立した測定の場合に適用できる。
量Xについて,n回の独立な測定で得たXkに対しての算術平均は,式(A.1)によって算出する。
∑
=
=
n
k
k
X
n
X
1
1
········································································· (A.1)
この平均は,その量の推定値とされる。つまり,x=Xとする。測定に基づいて実験の標準偏差は,式(A.2)
によって算出する。
2
/1
1
2)
(
1
1
)
(
−
−
=
∑
=
n
k
k
X
X
n
X
s
··················································· (A.2)
ここに,
X: 測定値の算術平均
Xk: 一連の測定の測定サンプル
n: 測定の回数で,例えば,n≧10のような大きな数字を想定する。
推定値をxとするとき,タイプAの標準不確かさutypeA(x)は,式(A.3)によって算出し,実験の平均値に
おける標準偏差で表す。
n
X
s
X
s
x
u
)
(
)
(
)
(
typeA
=
=
····························································· (A.3)
A.3 タイプB評価の不確かさ
タイプB評価の標準不確かさは,一連の測定の統計的な分析以外によって不確かさを評価する方法であ
る。ここでは,数値の変動に関して得ることができるあらゆる情報に基づいた科学的な判断によって評価
する。
量Xの推定値xが,製造業者の仕様,校正証明書,ハンドブック又は他の情報源から得ることができ,
その引用した不確かさU(x)が,標準偏差のk倍ある場合,標準不確かさu(x)は,単に,式(A.4)となる。
k
x
U
x
u
)
(
)
(
=
··········································································· (A.4)
量Xについて,上限値Xmax及び下限値Xminが評価できる場合(例えば,製造業者の仕様又は温度範囲の
ような),方形状の確率分布を推定して,推定値xは,式(A.5)によって算出する。
28
C 6185-1:2017
)
(
2
1
min
max
X
X
x
+
=
·································································· (A.5)
標準不確かさは,式(A.6)によって算出する。
)
(
3
2
1
)
(
min
max
X
X
x
u
−
=
··························································· (A.6)
出力推定値y及び関連付けられる標準不確かさへの寄与で,入力推定値x及び関連する標準不確かさが
要因となって生じるものは,式(A.7)となる。
)
(
)
(
s
x
u
C
y
u
×
=
······································································ (A.7)
ここに,Csは,入力推定値xに関連付けられる感度係数であって,これは,モデル関数y(x)の入力推定
値xに関する偏導関数である。
x
y
C
∂
∂
=
s
················································································ (A.8)
感度係数Csは,出力推定値yが,入力推定値xの変化によってどの程度影響されるかを示す。感度係数
Csは,出力推定値yの変化分であって,それは,入力推定値xの変化によるモデル関数y(x)から算出でき
る。また,式(A.8)又は数値計算でも算出できる。xの変化によって生じる出力推定値yの変化は,実験で
求めるのがよい。
A.4 標準不確かさの合成
合成された標準不確かさとは,個々の不確かさを集めて一つの量にまとめたものである。
標準不確かさは,個々の不確かさが統計上互いに独立であるとして,式(A.9)に示すようにタイプA及び
タイプBによって見積もった全ての不確かさの二乗和の平方根をとって合成する。
∑
=
n
i
iy
u
y
u
1
2
c
)
(
)
(
=
··································································· (A.9)
ここに,
i: 個々の要因の数
ui(y): それぞれの標準不確かさ
n: 不確かさの数
注記 式(A.9)では,最大の不確かさ(ばらつき量)の1/10以下の不確かさは,二乗すると1/100以下
となるので無視してもよい。
上記の量を基に,更に詳細に不確かさを算出する場合は,合成した標準不確かさucを基準として,式(A.9)
に再投入する。ここに,ucは,部分的にはタイプAの性格を帯びているが,タイプBの不確かさを示して
いる。
A.5 かたより(系統誤差)
ここでは,測定器を用いてある量を測定した結果から得た推定値xと,その基準値(参照値又は標準値)
X0との差を,この測定器のかたよりDと考える。上記のタイプA及びタイプB(一様分布の場合)の不確
かさ算出のときに用いられる測定サンプルを用いてかたよりDを求めると,それぞれ式(A.10)及び式(A.11)
のとおりとなる。
∑
=
−
=
n
k
kX
X
n
D
1
0
typeA
)
(
1
(タイプA) ··········································(A.10)
29
C 6185-1:2017
0
min
max
typeB
2
X
X
X
D
−
+
=
(タイプB) ········································ (A.11)
一般にこのようなかたよりは,十分に高い精度で測定サンプルの基準値が評価済みであれば,測定結果
に与える影響を事前に予測できる性質のものであり,生の測定値に補正を加える(測定結果からDを減じ
る)ことで,その影響を除去できると考えられる。このため,上記で定義する標準不確かさは,測定結果
に対して,考え得る全てのかたよりの影響を補正した後の測定結果を用いて算出されることを前提として
いる。すなわち,測定結果に含まれるかたよりが補正済みであると仮定している。これに対し,確度の規
定では,かたよりの寄与を明示的に含んだ形で誤差の限界値を算出する。
(a) かたよりのある分布
(b) かたよりを不確かさ
に置き換えた分布
Xmax
D
X0
3utypeB
3utypeB
X0
3utypeB
3utypeB
Xu= max(|Xmax−X0|, |Xmin−X0|)
Xmin
X0+Xu
X0−Xu
図A.1−タイプB不確かさのかたよりを不確かさに置き換える方法
一般に,温度範囲などの動作条件に伴う不確かさの寄与は,タイプBの不確かさとして扱う。こうした
動作条件に伴うかたよりの寄与をそのまま被試験器の確度に反映させることが適切でない場合,図A.1に
示すように,かたよりのある一様分布を,もっと広い対称的な(かたよりをもたない)分布に置き換えて
考えることによって,偏差を省くことができる。この場合,不確かさは,式(A.6)による値よりも大きくな
り,式(A.12)によって算出される値となる。
)
(
|
||,
|
max
3
1
)
(
0
min
0
max
X
X
X
X
x
u
−
−
=
·····································(A.12)
A.6 不確かさと確度との関係
各動作条件に対するかたよりの寄与を不確かさに置き換えて考える場合,確度の定義は式(A.13)のとお
りとなる。
∑
=
+
±
=
p
i
i
ε
ε
k
ε
ε
ε
1
2
t
2
to
to
tl
tu
························································(A.13)
ここに,
εtu: 被試験器の動作誤差の上限
εtl: 被試験器の動作誤差の下限
to
ε: 標準試験条件における被試験器のかたより
εto: 標準試験条件における被試験器の不確かさ
εti: 被試験器の各動作条件に対する不確かさ
3
)
,
max(
tl
tu
|
||
|
i
i
ε
ε
30
C 6185-1:2017
ここに,
εtui: 各動作条件に対する不確かさ寄与の上限
εtli: 各動作条件に対する不確かさ寄与の下限
k: 包含係数
i: 各動作条件に対する添字
p: 動作条件の数
式(A.13)の右辺第1項は,かたより補正を表す。また,第2項は,予期できない測定値のばらつきを表
す。これらの式に用いられる各変数のうち,
to
ε及びεtoは,それぞれ標準試験条件に対する試験における
かたよりDto及び測定値のばらつきに伴う不確かさutoに相当し,εtiは,各動作条件に対する試験における
不確かさの寄与utiに相当する。したがって,試験によって得た不確かさの値を用いて被試験器の確度を求
めることができる。
A.7 製品群としての確度(参考)
かたよりDtoは被試験器ごとに固有の値をもつが,同一仕様の複数の被試験器に対してDtoを評価すれば,
その値はある統計分布に従う確率変数とみなすことができる。したがって,その統計分布を知ることがで
きれば,Dtoを被試験器ごとのばらつきと捉え,その不確かさの寄与を評価することが可能となり,これを
被試験器が属する製品群の仕様値としての確度の算出に用いることができる。例えば,被試験器の確度が
式(A.13)で与えられており,被試験器が属する製品群におけるDtoの分布の標準偏差がσtoである場合,製
品群としての確度は式(A.14)によって算出する。
∑
=
+
+
±
=
p
i
i
u
u
σ
k
ε
ε
1
2
t
2
to
2
to
tl
tu
······················································(A.14)
さらに,Dtoが一様分布に従い,かつ,その上限Dto,u及び下限Dto,lが既知である場合,製品群としての確
度は,式(A.15)によって算出する。
∑
=
+
+
±
=
p
i
i
u
u
D
D
k
ε
ε
1
2
t
2
to
2
l
to,
u
to,
tl
tu
3
)}
|
|,|
|
{max(
······························(A.15)
31
C 6185-1:2017
附属書B
(参考)
後方散乱光反射率の測定方法
B.1
一般
この附属書は,光ファイバの後方散乱光反射率Rbs及びその不確かさを評価する方法について解説する
ものであり,規定の一部をなすものではない。
B.2
測定原理
被測定光ファイバに一定パワーの連続光を入射した場合,戻り光の成分として,近端での反射及び後方
散乱光を考え,その全反射減衰量Rtot(線形表示)は,式(B.1)によって算出する。
nr
2
s
nr
0
2
s
tot
2
e
1
d
e
R
α
S
α
R
x
S
α
R
αL
L
αx
+
−
=
+
=
−
−
∫
································ (B.1)
ここに,
Rnr: 被測定光ファイバ近端の反射率(線形表示)
S: 全散乱光のうちで後方散乱光が占める割合(線形表示)
αs: 被測定光ファイバのレイリー散乱損失係数(1/km)
α: 被測定光ファイバの損失係数(1/km)
L: 被測定光ファイバの長さ(km)
式(B.1)を変形して,式(B.2)を得る。
)
(
e
1
2
nr
tot
2
s
R
R
α
S
α
αL
−
−
=
−
··························································· (B.2)
一方,被測定光ファイバにパルス光を入射した場合,そのピークパワーに対する後方散乱光反射率Rbs
は,式(B.3)によって算出する。
g
s
bs
2N
c
SW
α
R
×
=
··································································· (B.3)
ここに,
W: 等価入力光パルス幅(s)
Ng: 光ファイバの群屈折率。距離試験で用いた便宜的な値(Ng=
1.460 0)ではなく,実測値を用いる。
後方散乱光反射率Rbsを光パルス幅Wで除した値を被測定光ファイバの後方散乱パラメータKとする。
Kは光ファイバの特性だけで決まり,OTDR装置に依存しない値である。そこで,Rbsの測定では,まずK
の値を測定し,これにWを乗じることによってRbsの値を求める。
式(B.2)及び式(B.3)から,K及びRbsを求めるための式として,式(B.4)及び式(B.5)を得る。
)
(
)
e
1(
nr
tot
g
2
R
R
N
αc
K
αL
−
−
=
−
······················································· (B.4)
KW
R=
bs
············································································· (B.5)
測定によってRtot,Rnr,α及びLの値を求め,これらを式(B.4)及び式(B.5)に代入し,K及びRbsの値を求
める。
B.3
後方散乱パラメータの測定
図B.1に,全反射減衰量Rtotの測定系を示す。図B.2に,被測定光ファイバの長さL,損失α,及び近端
フレネル反射の反射率Rnrの測定系を示す。この両者の測定系を用いた測定結果に基づき,Kを算出する。
32
C 6185-1:2017
次に,被測定器の光パルス幅を測定し,後方散乱光反射率Rbsを求める。
光パワー
メータ
被測定光ファイバ
光源
光ファイバF1
光ファイバF2
ポート
P1
ポート
P2
ポート
P3
光サ
丨
キ
ュ
レ
丨
タ
1
図B.1−全反射減衰量の測定系
被測定光ファイバ
光ファイバF4
光ファイバF5
ポート
P1
ポート
P2
ポート
P3
光
サ
丨
キ
ュ
レ
丨
タ
1
ポート
P2
ポート
P3
ポート
P1
光
サ
丨
キ
ュ
レ
丨
タ
2
OTDR
光ファイバ
F3
図B.2−光ファイバの長さ,損失及び近端フレネル反射の反射率の測定系
後方散乱パラメータの測定における装置及び試験手順は,次による。
a) 装置
1) 光ファイバ 種類は,表1から選択する。被測定光ファイバの長さは,5 km以上とする。光ファイ
バF1及びF2の長さは,2 m〜10 mとし,F3の長さは,1 km〜3 kmとする。また,光ファイバF4
及びF5の長さの和が2 km程度となるようにする。
2) 光サーキュレータ ポートP1からポートP2への方向及びポートP2からポートP3への方向には低
損失で光を透過し,それ以外のポート及び方向では50 dB以上の通過損失をもつものを用いる。ま
た,各ポートと光ファイバとの接続部での反射の抑圧のため,APC形コネクタを使用することが望
ましい。
3) 光源 被試験器の光出力と同じ波長をもち,光パワーが安定な連続光を発生するものを用いる。
4) 光パワーメータ 観測する光に対して十分な感度及び直線性をもち,指示値の不確かさが既知のも
のを用いる。
5) OTDR装置 被試験器の光出力と同じ波長の光源をもち,距離不確かさ及び損失不確かさが既知の
ものを用いる。
b) 試験手順
1) まず,被測定光ファイバの後方散乱パラメータKの測定を行う。図B.1の光サーキュレータ1のポ
ートP2からポートP3への挿入損失α23(dB)を測定する。ポートP2に,被測定光ファイバと同じ
光パワー
メータ
33
C 6185-1:2017
種類の光コード(長さ2 m以上)を接続し,JIS C 6823の挿入損失試験方法の手順に従って損失を
測定する。この測定を10回以上繰り返し,i回目の測定で得た損失をα23,i(i=1,2,…)として,
式(B.6)及び式(B.7)によって,測定値α23(dB)及びその相対不確かさu23(dB)を算出する。
∑
=
=
m
i
i
α
m
α
1
,
23
23
1
······································································· (B.6)
∑
=
−
−
=
m
i
i
α
α
m
m
u
1
2
23
,
23
23
)
(
)1
(
1
·················································· (B.7)
ここに,
m: 測定回数
2) 光源出力を,光サーキュレータ1の入力ポートP1に接続し,ポートP2に接続した光コードのもう
一端を光パワーメータに接続する。この状態で光パワーメータの指示値Pin(mW)を記録する。
3) ポートP2から光コードを外して,被測定光ファイバを接続し,実験系を図B.1の状態に戻す。ポー
トP3に接続した光ファイバF2のもう一端を光パワーメータに接続する。この状態で光パワーメー
タの指示値Prt(mW)を記録する。
4) 式(B.8)及び式(B.9)によって,被測定光ファイバの全反射減衰量Rtot及びその百分率不確かさuRtot(%)
を算出する。
32
in
rt
tot
T
P
P
R=
··········································································· (B.8)
2
PM
2
23
2
PM
2
23
e
Rtot
2
0.
23
2
10
log
10
u
u
u
u
u
+
=
+
×
=
······························ (B.9)
ここに,
T23: ポートP2からポートP3への光パワー透過率(線形表示)
T23=10−(α23/10)
uPM: 光パワーメータの指示値の不確かさ(dB表示)
5) 図B.1の光サーキュレータ1を,ポートP2に被測定光ファイバを接続したまま図B.2の測定系に接
続し,OTDR装置の画面に被測定光ファイバの波形が明瞭に表示されるように,距離レンジ,損失
レンジ及び平均化回数を設定し,波形を測定する。この測定を10回以上繰り返し,i回目に測定し
た波形から,被測定光ファイバの損失係数αdB,i(dB/km)及び被測定光ファイバ近端のフレネル反
射光パルス波形のピークレベルと,このパルス波形直後の後方散乱光レベルとの差Hnr,i(dB)を測
定する(図B.3参照)。また,測定した波形の一つから,被測定光ファイバの長さL(km)を測定す
る。
なお,被測定光ファイバ遠端にフレネル反射がないことを確認する。
被測定光ファイバ
Hnr
α
近端反射
後方散乱光
L
図B.3−観測される被測定光ファイバのOTDR波形の例
6) 式(B.10)及び式(B.11)によって,損失係数の測定値αdB(dB)及びそのばらつきに伴う不確かさuαdB
α
34
C 6185-1:2017
(dB/km)を算出する。
∑
=
=
m
i
i
α
m
α
1
,
dB
dB
1
····································································· (B.10)
∑
=
−
−
=
m
i
i
α
α
α
m
m
u
1
2
B
d
,
dB
dB
)
(
)1
(
1
················································ (B.11)
ここに,
m: 測定回数
7) 損失係数αdBを式(B.12)によって変換し,式(B.1)〜式(B.5)における損失係数αの値を算出する。また,
式(B.13)によって,α(1/km)の百分率不確かさuα(%)を算出する。
dB
dB
e
1
230
.0
10
log
10
α
α
α
=
×
=
−
·················································· (B.12)
α
u
u
α
α
100
230
.0
dB×
=
······························································· (B.13)
8) 式(B.14)及び式(B.15)によって,線形表示のフレネル反射光レベルの測定値hnr及びそのばらつきに
伴う百分率不確かさuhnr(%)を算出する。
∑
=
=
m
i
H
i
m
h
1
)
10
/
(
nr
,
nr
10
1
································································ (B.14)
nr
1
2
nr
)
10
/
(
hnr
100
)
10
(
)1
(
1
,
nr
h
h
m
m
u
m
i
H
i
×
−
−
=
∑
=
··································· (B.15)
ここに,
m: 測定回数
9) 図B.2のOTDR装置の光パルス幅をWtとし,近端での反射率Rnrは式(B.16)によって算出する。
t
2
nr
nr
)1
(
KW
h
R
−
=
··································································· (B.16)
式(B.16)を式(B.4)に代入し,式(B.17)によってKを算出する。
tot
2
nr
t
g
2
)1
(
)
e
1(
R
h
αcW
N
αc
K
αL
−
+
−
=
−
············································· (B.17)
また,Kの標準不確かさuK(%)は,式(B.18)によって算出する。
2
hnr
hnr
2
2
Rtot
K
)
(
)
(
u
G
u
G
u
u
α
α
+
+
=
··············································· (B.18)
ここに,
Gα: uαの寄与率を表す係数
[
]
)1
(
)
e
1(
e)1
2(
1
2
nr
t
g
2
g
2
−
+
−
+
−
=
−
−
h
W
αc
N
N
αL
G
αL
αL
α
Ghnr: uhnrの寄与率を表す係数
)1
(
)
e
1(
2
2
nr
t
g
2
2
nr
t
hnr
−
+
−
=
−
h
W
αc
N
h
W
αc
G
αL
10) 後方散乱パラメータKから後方散乱光反射率Rbsを求める場合,被試験器の光パルス幅Wを測定す
る必要がある。9.2の手順に従って,被試験器の光パルス幅を10回以上測定し,i回目の測定で得
た反射率をWi(s)(i=1,2,…)として,式(B.19)及び式(B.20)によって,測定値W(s)及び個々
の光パルスの幅に対する百分率不確かさuW(%)を算出する。
なお,光パルスが方形から外れた波形である場合には,この手順に代えて,附属書Cの手順に従
って,等価光パルス幅及びその不確かさを算出する。
35
C 6185-1:2017
∑
=
=
m
i
i
W
m
W
1
1
········································································ (B.19)
W
W
W
m
u
m
i
i
100
)
(
1
1
1
2
W
×
−
−
=
∑
=
················································· (B.20)
ここに,
m: 測定回数
11) K及びWの値を式(B.5)に代入し,Rbsの値を算出する。また,式(B.21)によって,Rbsの百分率不確
かさuRbs(%)を算出する。
2
W
2
K
Rbs
u
u
u
+
=
····································································· (B.21)
注記 Rbs及びuRbsをdB単位で表示する場合は,それぞれ式(B.22)及び式(B.23)によって値の変換を行
う。
bs
10
dB
bs,
log
10
R
R
=
·································································· (B.22)
Rbs
Rbs
10
dB
Rbs,
43
043
.0
e
log
1.0
u
u
u
=
×
=
········································· (B.23)
B.4
後方散乱パラメータの相対値の測定
後方散乱パラメータ及びその不確かさが既知の参照光ファイバがある場合,損失不確かさが評価された
OTDR装置を用いて,被測定光ファイバの後方散乱光反射率を簡便に測定することができる。その試験方
法は次のとおりである。
a) 被測定光ファイバと参照光ファイバとを接続する。被測定光ファイバのもう一方の端をOTDR装置に
接続し,被測定光ファイバ側から両者の光ファイバの接続損失αt−r(dB)を測定する。このとき,
αt−rは,式(B.24)に示す値となる。
ref
tst
10
sp
r
t
log
5
K
K
α
α
+
=
−
····························································· (B.24)
ここに,
αsp: 正しい接続損失の値(dB)
Ktst: 被測定光ファイバの後方散乱パラメータ(1/s)
Kref: 参照光ファイバの後方散乱パラメータ(1/s)
なお,測定のばらつきによる不確かさを抑制するため,接続位置における後方散乱光レベルが,雑
音レベルに対して,OTDR装置の画面表示で5 dB以上高くなるように,平均化回数を調整する。
b) 両者の光ファイバの接続部はそのままにして,参照光ファイバのもう一方の端をOTDR装置に接続し,
参照光ファイバ側から両者の光ファイバの接続損失αr−t(dB)を測定する。このとき,αr−tは,式(B.25)
に示す値となる。
tst
ref
10
sp
t
r
log
5
K
K
α
α
+
=
−
····························································· (B.25)
c) 式(B.24)及び式(B.25)から,被測定光ファイバの後方散乱パラメータKtst(1/s)及びその百分率不確か
さuKtst(%)は,それぞれ式(B.26)及び式(B.27)によって算出する。
10
/)
(
ref
tst
t
r
r
t
10
−
−−
×
=
α
α
K
K
··························································· (B.26)
2
e,lt
2
ref
tst
u
u
u
K
K
+
=
·································································· (B.27)
ここに, uKref: 参照光ファイバの後方散乱パラメータの百分率不確かさ(%)
ult,e: OTDR装置の損失の不確かさ(%)
36
C 6185-1:2017
d) 被測定光ファイバ及び参照光ファイバの後方散乱反射率をそれぞれRbs,ref及びRbs,tstとした場合,Rbs,tst
(%)及びその百分率不確かさuRbs,tst(%)は,それぞれ式(B.28)及び式(B.29)によって算出する。
ref
bs,
10
/)
(
ref
bs,
ref
tst
tst
bs,
t
r
r
t
10
R
R
K
K
R
α
α
×
=
×
=
−
−−
······································ (B.28)
2
ref
Rbs,
2
e
lt,
tst
Rbs,
u
u
u
+
=
······························································ (B.29)
37
C 6185-1:2017
附属書C
(参考)
等価光パルス幅及びピーク出力レベルの測定方法
C.1 一般
この附属書は,任意の波形の光パルスに対する等価光パルス幅及びその不確かさを評価する方法につい
て解説するものであり,規定の一部をなすものではない。
C.2 測定方法
図C.1の試験系を用いて被試験器の光出力パルスの波形及び光パワーを観測し,そのデータから光出力
ピークレベル,光パルス幅及びこれらの不確かさを求める。
なお,試験は標準試験条件で実施する。
等価光パルス幅及びピーク出力レベルの測定における装置及び試験手順は,次による。
a) 装置
1) 光ファイバ 種類は,表1から選択する。また,その長さは,2 m〜10 mとする。
2) 受光器 観測する光パルスに対して十分な感度,帯域,及び直線性をもつ受光器を用いる。
3) オシロスコープ 観測する信号波形に対して十分な帯域をもち,かつ,十分短いサンプリング周期
で観測波形のデジタル電圧値を取得できるデジタルオシロスコープを用いる。
4) 光パワーメータ 観測する光パルスに対して十分な感度及び直線性をもち,一定の周期で入力する
光パルスの平均光パワーを測定可能なものを用いる。
受光器
被試験器
光ファイバ
デジタル
オシロスコープ
光パワーメータ
図C.1−光パルス幅及びピーク出力レベルの試験系
b) 試験手順
1) 光ファイバの一端を受光器に接続して被試験器を動作させ,オシロスコープの画面に光パルス波形
全体が表示されるように時間軸を調整し,光出力が0の場合の出力電圧が0となるようにゼロ補正
した光出力パルス波形を記録する。これを5回以上繰り返し(繰返し回数をrとする),平均化した
波形データV(t)(t:時間)を取得する(オシロスコープに平均化処理機能がある場合,これを利用
してもよい。)。
2) 1)で示した波形データの取得をm回繰り返し,i回目の測定データをVi(t)(i=1,2,…,m)とす
る。次に,オシロスコープの時間軸スケールを調整して複数の光パルス波形を含む波形データを取
オシロスコープ
38
C 6185-1:2017
得し,このデータから光パルスの繰返し周期Tを求める。
3) 光ファイバを光パワーメータに接続し,光出力パルス波形の平均パワーPavを測定する。
4) Vi(t)の最大値をVpeak,iとし,Vpeak,iから最大値の推定値Vpeak(V)及び測定のばらつきによる百分率不
確かさupeak(%)を,それぞれ式(C.1)及び式(C.2)によって算出する。
∑
=
=
m
i
i
V
m
V
1
,
peak
peak
1
··································································· (C.1)
peak
1
2
peak
,
peak
peak
100
)
(
)1
(
1
V
V
V
m
m
u
m
i
i
×
−
−
=
∑
=
····································· (C.2)
5) パルス波形Vi(t)の積分値Sv,i(V·s)を式(C.3)によって算出し,積分値の推定値Sv(V·s)及び測定の
ばらつきによる百分率不確かさusv(%)を,それぞれ式(C.4)及び式(C.5)によって算出する。
∫
=
e
s
d)
(
,v
t
t
i
i
t
t
V
S
······································································ (C.3)
ここに,
ts: オシロスコープ画面の始端の時刻
te: オシロスコープ画面の終端の時刻
∑
=
=
m
i
i
S
m
S
1
,v
v
1
········································································ (C.4)
v
1
2
v
,v
sv
100
)
(
)1
(
1
S
S
S
m
m
u
m
i
i
×
−
−
=
∑
=
············································· (C.5)
6) 4)及び5)で算出したVpeak,Sv及びこれらの不確かさの値から,出力光パルス幅W及びr回の平均化
処理を行う場合の不確かさuW(%)を,式(C.6)及び式(C.7)によって求める。
peak
v
V
S
W=
·············································································· (C.6)
2
sv
2peaku
u
uW
+
=
····································································· (C.7)
7) 式(C.8)及び式(C.9)によって出力光パルスのピークレベルPpeak及びr回の平均化処理を行う場合の不
確かさuppk(%)を算出する。
W
T
P
P
×
=
av
peak
········································································ (C.8)
2
PM
2
ppk
u
u
u
W+
=
····································································· (C.9)
ここに, uPM: 光パワーメータの表示値の百分率不確かさ(%)
注記 光パワーメータの表示値の不確かさがdB単位で与えられている場合,この値に23.0(=
10loge10)を乗じることによって,%単位の値(百分率不確かさ)に変換することができる。