C 4210 : 2001
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本電機
工業会 (JEMA) から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本工業標準調
査会の審議を経て,経済産業大臣が改正した日本工業規格である。これによってJIS C 4210 : 1983は改正
され,この規格に置き換えられる。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任をもたない。
JIS C 4210には,次に示す附属書がある。
附属書(参考) JISと国際規格との対比表
C 4210 : 2001
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 定格 ······························································································································ 2
3.1 定格電圧 ······················································································································ 2
3.2 定格出力 ······················································································································ 2
4. 性能 ······························································································································ 2
4.1 温度上昇 ······················································································································ 2
4.2 全負荷特性 ··················································································································· 2
4.3 トルク特性 ··················································································································· 5
4.4 始動入力特性 ················································································································ 6
4.5 騒音レベル ··················································································································· 6
4.6 耐電圧 ························································································································· 7
4.7 運転中の電圧及び周波数変動 ···························································································· 7
5. 構造 ······························································································································ 8
5.1 附属品 ························································································································· 8
5.2 ケーブル引込口 ············································································································· 8
5.3 スターデルタ始動器 ······································································································· 8
5.4 接地端子 ······················································································································ 8
6. 寸法 ······························································································································ 8
7. 試験方法 ······················································································································· 13
7.1 試験の種類 ·················································································································· 13
7.2 構造試験 ····················································································································· 13
7.3 抵抗測定 ····················································································································· 14
7.4 拘束試験 ····················································································································· 14
7.5 無負荷試験 ·················································································································· 14
7.6 温度試験 ····················································································································· 14
7.7 負荷特性及びトルク特性の算定 ························································································ 14
7.8 始動入力特性試験 ········································································································· 24
7.9 騒音試験 ····················································································································· 26
7.10 耐電圧試験 ················································································································· 30
8. 表示 ····························································································································· 30
附属書(参考) JISと国際規格との対比表 ·············································································· 31
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 4210 : 2001
一般用低圧三相かご形誘導電動機
Low-voltage three-phase squirrel-cage induction
motors for general purpose
序文 この規格は,IEC 60034-1 : 1996 Rotating electrical machines−Part 1 : Rating and performance, IEC
60034-2 : 1972 Rotating electrical machines−Part 2 : Methods for determining losses and efficiency of rotating
electrical machinery from tests, IEC 60034-9 : 1997 Rotating electrical machines−Part 9 : Noise limits, IEC
60034-12 : 1972 Rotating electrical machines−Part 12 : Starting performance of single-speed three-phase cage
induction motors for voltage up to and including 660V, IEC 60072-1 : 1991 Dimensions and output series for
rotating electrical machines−Part 1 : Frame numbers 56 to 400 and flange numbers 55 to 1080を元に作成した日
本工業規格であるが,この規格の適用範囲以外の製品を対象とした規定内容を削除したほか,対応国際規
格には規定されていない項目及び内容を追加している。
なお,この規格で点線の下線を施してある箇所は,対応国際規格にない事項又は異なる事項である。
1. 適用範囲 この規格は,冷媒温度40℃以下の場所に使用される連続定格,周波数50Hz若しくは60Hz
専用又は50Hz/60Hz共用,電圧600V以下,保護方式はIP2X(保護形)及びIP4X(全閉形)の一般用低
圧三相かご形誘導電動機(以下,電動機という。)について規定する。
備考1. この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
IEC 60034-1 : 1996 Rotating electrical machines−Part 1 : Rating and performance (MOD)
IEC 60034-2 : 1972 Rotating electrical machines−Part 2 : Methods for determining losses and
efficiency of rotating electrical machinery from tests (MOD)
IEC 60034-9 : 1997 Rotating electrical machines−Part 9 : Noise limits (MOD)
IEC 60034-12 : 1972 Rotating electrical machines−Part 12 : Starting performance of single-speed
three-phase cage induction motors for voltage up to and including 660 V (MOD)
IEC 60072-1 : 1991 Dimensions and output series for rotating electrical machines−Part 1 : Frame
numbers 56 to 400 and flange numbers 55 to 1080 (MOD)
2. 保護方式IP2X及びIP4Xの詳細は,JIS C 4034-5による。
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0401-1 寸法公差及びはめあいの方式−第1部:公差,寸法差及びはめあいの基礎
2
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 0401-2 寸法公差及びはめあいの方式−第2部:穴及び軸の公差等級並びに寸法許容差の表
JIS B 0902 回転軸の高さ
JIS B 1001 ボルト穴径及びざぐり径
JIS B 1301 キー及びキー溝
JIS C 1502 普通騒音計
JIS C 4034-5 回転電気機械−第5部:外被構造による保護方式の分類
JIS K 6323 一般用Vベル
JIS K 6368 細幅Vベルト
IEC 60072-1 Dimensions and output series for rotating electrical machines−Part 1 : Frame numbers 56 to
400 and flange numbers 55 to 1080
3. 定格
3.1
定格電圧 定格電圧は,表1による。
表1 定格電圧
単位 V
定格電圧
200 220 400 440
3.2
定格出力 定格出力は,軸において連続して使用可能な機械的出力であり,キロワット (kW) で表
し,表2による。
表2 定格出力
単位 kW
定格出力
0.2,0.25,0.37,0.4,0.55,0.75,1.1,1.5,2.2,3.7,5.5,7.5,11,15,18.5,22,30,37
4. 性能
4.1
温度上昇 温度上昇は,7.6によって試験を行ったとき,表3の値以下でなければならない。
表3 温度上昇限度
単位 K
電動機の部分
耐熱クラス
抵抗法
0.2〜0.55kW
0.75〜37kW
固定子巻線
E
75
75
B
−
80
F
−
105
鉄心とすべての構造構成物
この部分の温度上昇は,いかなる場合もその部分の絶縁物及び
近傍の材料に有害な影響を与えてはならない。
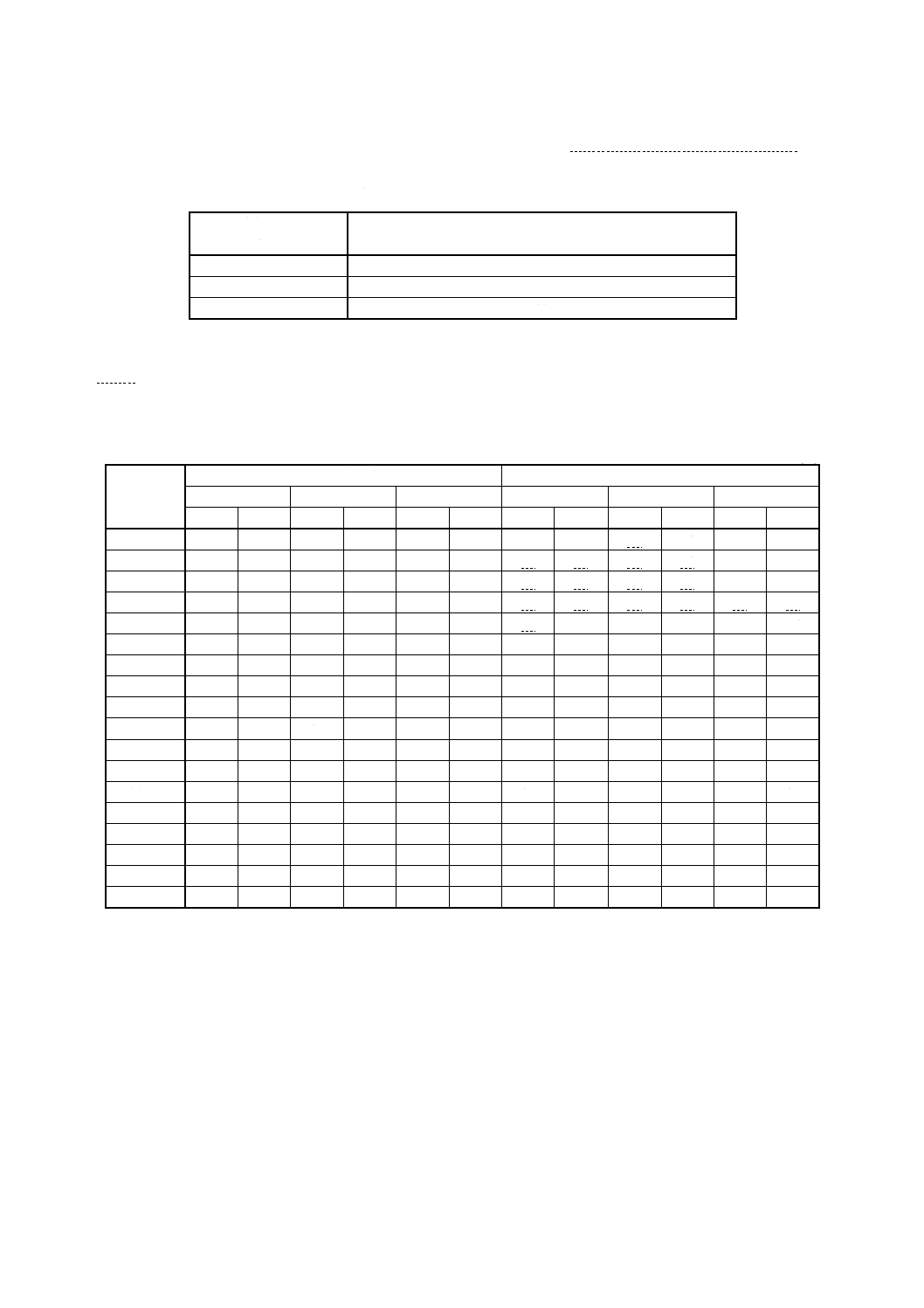
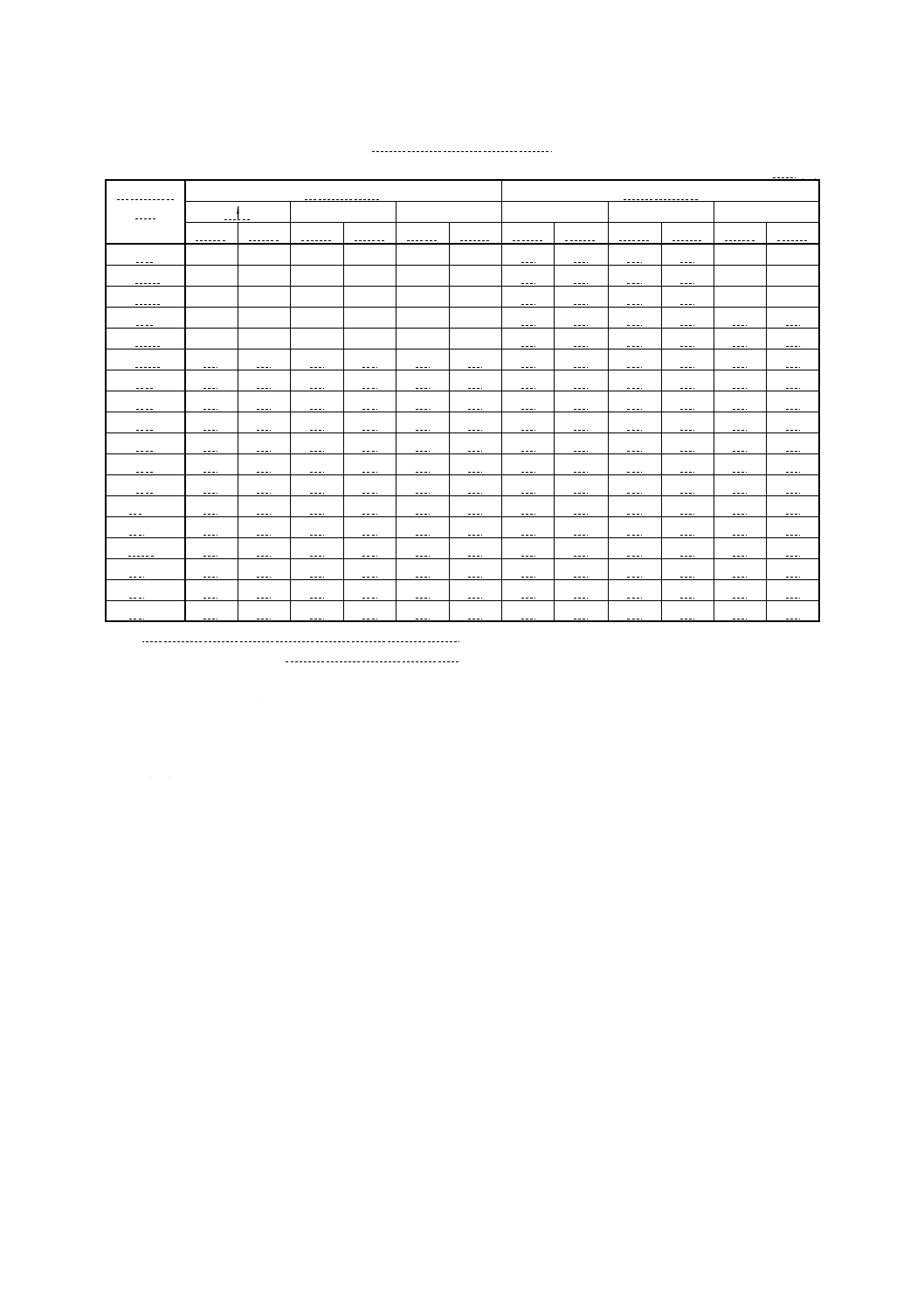
4.2
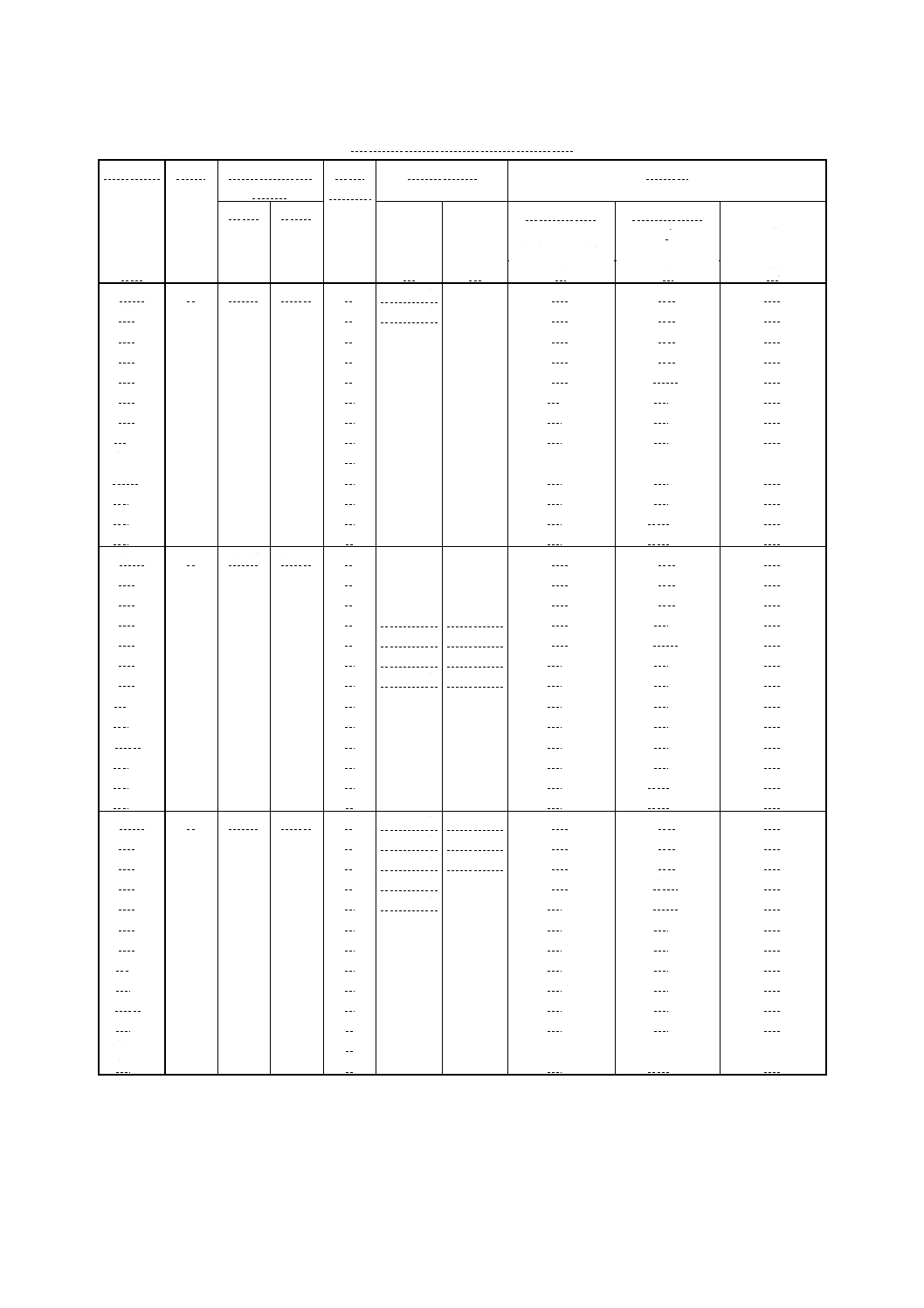
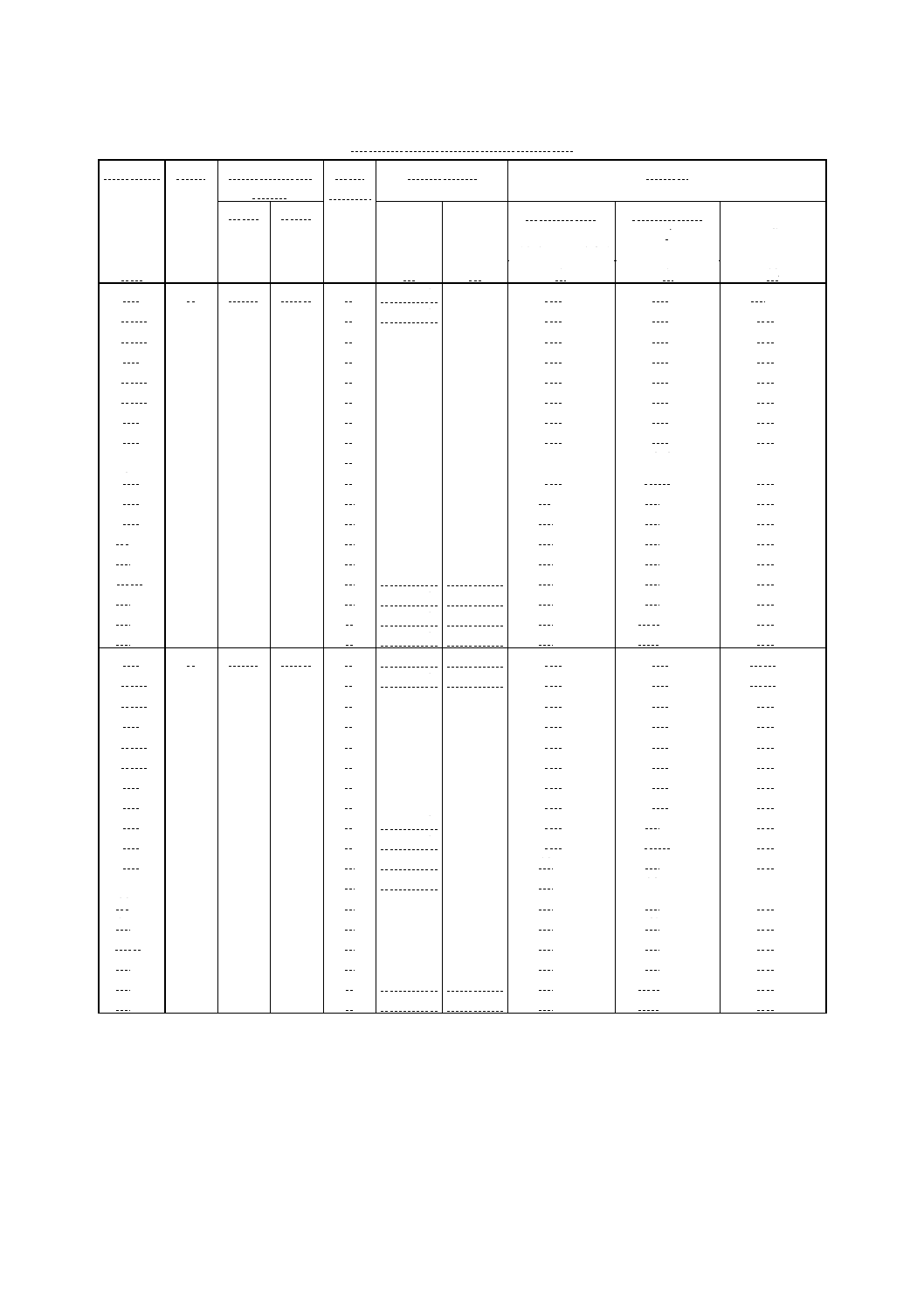
全負荷特性 定格電圧200Vの電動機の全負荷特性は,7.7によって試験を行ったとき,IP2X電動機
は表4,IP4X電動機は表5による。
なお,表4及び表5の全負荷電流及び無負荷電流の値は,定格電圧200Vの場合のもので,定格電圧E (V)
の場合には,そのE
200をとる。
3
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4 IP2X電動機の全負荷特性
定格出力 極数
同期回転速度
min−1
耐熱
クラス
全負荷特性
参考値
50Hz
60Hz
効率η
力率Pf
無負荷電流
全負荷電流
全負荷滑り
Io
I
S
(各相の平均値) (各相の平均値)
kW
%
%
A
A
%
0.75
2
3 000
3 600
E
68.0以上 77.0以上
2.1
3.9
7.5
1.1
E
72.0以上 79.0以上
2.8
5.4
7.0
1.5
E
74.5以上 80.5以上
3.4
6.9
7.0
2.2
E
77.0以上 81.5以上
4.6
9.6
6.5
3.7
E
80.0以上 82.5以上
6.9
15.4
6.0
5.5
B
82.0以上 82.5以上
11
23
6.0
7.5
B
83.0以上 82.5以上
14
31
6.0
11
B
84.0以上 82.5以上
18
44
5.5
15
B
85.0以上 83.0以上
23
58
5.5
18.5
B
85.5以上 83.5以上
28
71
5.5
22
B
86.0以上 84.0以上
32
84
5.0
30
B
86.5以上 84.5以上
42
113
5.0
37
F
87.0以上 85.0以上
50
138
5.0
0.75
4
1 500
1 800
E
69.5以上 70.0以上
2.8
4.2
8.0
1.1
E
73.0以上 73.0以上
3.6
5.8
7.5
1.5
E
75.5以上 75.0以上
4.3
7.3
7.5
2.2
E
78.5以上 77.0以上
5.5
10
7.0
3.7
E
81.0以上 78.0以上
9.0
16.1
6.5
5.5
B
82.5以上 78.0以上
12
24
6.0
7.5
B
83.5以上 79.0以上
15
31
6.0
11
B
84.5以上 80.0以上
22
45
6.0
15
B
85.5以上 80.5以上
28
60
5.5
18.5
B
85.5以上 80.5以上
34
74
5.5
22
B
86.0以上 81.0以上
40
87
5.5
30
B
86.5以上 81.5以上
53
117
5.5
37
F
87.0以上 82.0以上
63
143
5.5
0.75
6
1 000
1 200
E
68.0以上 63.0以上
3.4
4.8
8.5
1.1
E
72.0以上 67.0以上
4.2
6.4
8.0
1.5
E
74.5以上 69.0以上
5.2
8.0
8.0
2.2
E
77.0以上 71.0以上
6.8
11.1
7.0
3.7
B
80.0以上 73.0以上
10
17.4
6.5
5.5
B
82.0以上 73.0以上
15
25
6.0
7.5
B
83.0以上 74.0以上
19
34
6.0
11
B
84.0以上 75.5以上
25
48
6.0
15
B
84.5以上 76.0以上
34
64
6.0
18.5
B
85.0以上 76.5以上
41
78
5.5
22
F
85.5以上 77.0以上
47
92
5.5
30
F
86.0以上 78.0以上
61
123
5.5
37
F
86.5以上 78.5以上
74
152
5.5
4
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5 IP4X電動機の全負荷特性
定格出力 極数
同期回転速度
min−1
耐熱
クラス
全負荷特性
参考値
50Hz
60Hz
効率η
力率Pf
無負荷電流
全負荷電流
全負荷滑り
Io
I
S
(各相の平均値) (各相の平均値)
kW
%
%
A
A
%
0.2
2
3 000
3 600
E
54.5以上 65.0以上
1.1
1.6
10
0.25
E
57.0以上 67.5以上
1.2
1.9
9.5
0.37
E
61.0以上 71.5以上
1.4
2.4
8.5
0.4
E
62.0以上 72.0以上
1.5
2.5
8.5
0.55
E
65.5以上 74.5以上
1.8
3.2
8.0
0.75
E
68.0以上 77.0以上
2.1
3.9
7.5
1.1
E
71.5以上 79.0以上
2.7
5.3
7.0
1.5
E
74.5以上 80.5以上
3.4
6.9
7.0
2.2
E
77.0以上 81.5以上
4.6
9.6
6.5
3.7
E
80.0以上 82.5以上
6.9
15.4
6.0
5.5
B
82.0以上 82.5以上
11
23
6.0
7.5
B
83.0以上 82.5以上
14
31
6.0
11
B
84.0以上 82.5以上
18
44
5.5
15
B
85.0以上 82.5以上
24
59
5.5
18.5
B
85.5以上 83.0以上
29
72
5.5
22
B
86.0以上 83.5以上
32
84
5.0
30
F
86.5以上 84.0以上
43
114
5.0
37
F
87.0以上 84.5以上
51
139
5.0
0.2
4
1 500
1 800
E
56.0以上 53.0以上
1.5
1.8
10.5
0.25
E
58.5以上 56.5以上
1.6
2.1
10.0
0.37
E
62.5以上 62.0以上
1.9
2.6
9.0
0.4
E
63.5以上 63.0以上
2.0
2.8
9.0
0.55
E
66.5以上 67.0以上
2.3
3.4
8.5
0.75
E
69.5以上 70.0以上
2.8
4.2
8.0
1.1
E
73.0以上 73.0以上
3.5
5.6
7.5
1.5
E
75.5以上 75.0以上
4.3
7.3
7.5
2.2
E
78.5以上 77.0以上
5.5
10
7.0
3.7
E
81.0以上 78.0以上
9.0
16.1
6.5
5.5
B
82.5以上 78.0以上
13
24
6.0
7.5
B
83.5以上 78.0以上
16
32
6.0
11
B
84.5以上 79.0以上
23
45
6.0
15
B
85.5以上 79.5以上
29
61
5.5
18.5
B
86.0以上 80.0以上
35
74
5.5
22
B
86.5以上 80.5以上
40
87
5.5
30
F
87.0以上 81.0以上
53
117
5.5
37
F
87.5以上 81.5以上
64
143
5.5
5
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
定格出力 極数
同期回転速度
min−1
耐熱
クラス
全負荷特性
参考値
50Hz
60Hz
効率η
力率Pf
無負荷電流
全負荷電流
全負荷滑り
Io
I
S
(各相の平均値) (各相の平均値)
kW
%
%
A
A
%
0.4
6
1 000
1 200
E
62.0以上 55.0以上
2.5
3.2
10
0.55
E
65.0以上 59.5以上
2.9
3.9
9.0
0.75
E
68.0以上 63.0以上
3.4
4.8
8.5
1.1
E
72.0以上 66.5以上
4.3
6.2
8.0
1.5
E
74.5以上 69.0以上
5.2
8.0
8.0
2.2
E
77.0以上 71.0以上
6.8
11.1
7.0
3.7
B
80.0以上 73.0以上
10
17.4
6.5
5.5
B
82.0以上 73.0以上
15
26
6.0
7.5
B
83.0以上 73.0以上
19
34
6.0
11
B
84.0以上 74.5以上
26
48
6.0
15
B
84.5以上 75.0以上
35
65
6.0
18.5
F
85.0以上 76.0以上
41
79
5.5
22
F
85.5以上 76.5以上
47
93
5.5
30
F
86.0以上 77.5以上
61
124
5.5
37
F
86.5以上 78.0以上
74
152
5.5
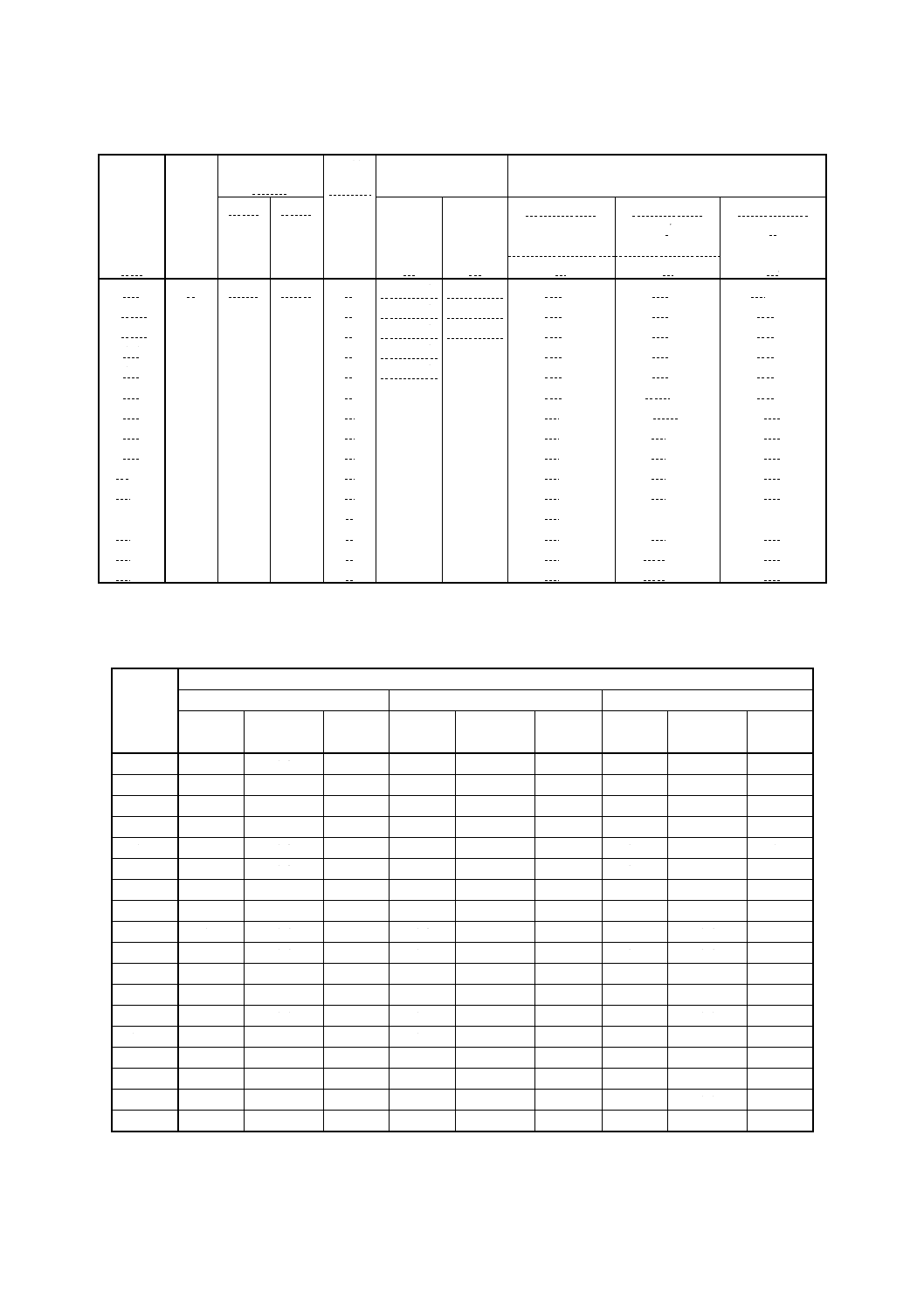
4.3
トルク特性 最小始動トルク,プルアップトルク及び最大トルクは,7.7によって試験を行ったとき,
表6に示す値以上でなければならない。
表6 電動機のトルク特性
定格出力
kW
定格トルクに対する比
2極
4極
6極
最小始動
トルク
プルアップ
トルク
最大
トルク
最小始動
トルク
プルアップ
トルク
最大
トルク
最小始動
トルク
プルアップ
トルク
最大
トルク
0.2
1.9
1.3
2.0
2.0
1.4
2.0
−
−
−
0.25
1.9
1.3
2.0
2.0
1.4
2.0
−
−
−
0.37
1.9
1.3
2.0
2.0
1.4
2.0
−
−
−
0.4
1.9
1.3
2.0
2.0
1.4
2.0
1.7
1.2
1.7
0.55
1.9
1.3
2.0
2.0
1.4
2.0
1.7
1.2
1.7
0.75
1.8
1.2
2.0
1.9
1.3
2.0
1.7
1.2
1.8
1.1
1.8
1.2
2.0
1.9
1.3
2.0
1.6
1.1
1.9
1.5
1.8
1.2
2.0
1.9
1.3
2.0
1.6
1.1
1.9
2.2
1.7
1.1
2.0
1.8
1.2
2.0
1.6
1.1
1.9
3.7
1.6
1.1
2.0
1.7
1.2
2.0
1.5
1.1
1.9
5.5
1.5
1.0
2.0
1.6
1.1
2.0
1.5
1.1
1.9
7.5
1.5
1.0
2.0
1.6
1.1
2.0
1.5
1.1
1.8
11
1.4
1.0
2.0
1.5
1.1
2.0
1.4
1.0
1.8
15
1.4
1.0
2.0
1.5
1.1
2.0
1.4
1.0
1.8
18.5
1.3
0.9
1.9
1.4
1.0
1.9
1.4
1.0
1.8
22
1.3
0.9
1.9
1.4
1.0
1.9
1.4
1.0
1.8
30
1.2
0.9
1.9
1.3
1.0
1.9
1.3
1.0
1.8
37
1.2
0.9
1.9
1.3
1.0
1.9
1.3
1.0
1.8
備考 定格出力0.2kW,0.25kW,0.37kW,0.4kW及び0.55kWは,IP4X電動機だけに適用する。
6
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4
始動入力特性 定格出力kWに対する始動入力kVAの比は,7.8によって試験を行ったとき,表7
に示す値以下でなければならない。
表7 定格出力kWに対する始動入力kVAの比
定格出力
kW
定格出力kWに対する始動入力kVAの比
kVA/kW
0.2〜 5.5
13
7.5〜22
12
30 〜37
11
備考 定格出力0.2kW,0.25kW,0.37kW,0.4kW及び0.55kWは,IP4X電動機だけに
適用する。
4.5
騒音レベル 騒音レベルは,7.9によって試験を行ったとき,A特性音響パワーレベルの場合は表8-1,
A特性音圧レベルの場合は表8-2に示す値以下でなければならない。
表8-1 A特性音響パワーレベル
単位 dB (A)
定格出力
kW
IP2X電動機
IP4X電動機
2極
4極
6極
2極
4極
6極
50Hz
60Hz
50Hz
60Hz
50Hz
60Hz
50Hz
60Hz
50Hz
60Hz
50Hz
60Hz
0.2
−
−
−
−
−
−
77
81
74
74
−
−
0.25
−
−
−
−
−
−
77
81
74
74
−
−
0.37
−
−
−
−
−
−
80
84
76
76
−
−
0.4
−
−
−
−
−
−
80
84
76
76
75
75
0.55
−
−
−
−
−
−
82
86
77
77
76
76
0.75
81
82
77
77
76
76
84
88
78
78
76
76
1.1
81
82
77
77
76
76
84
88
78
78
76
76
1.5
85
86
81
81
78
78
88
91
82
82
78
78
2.2
85
86
81
81
78
78
88
91
82
82
78
78
3.7
89
93
85
85
81
81
93
95
86
86
82
82
5.5
89
93
85
85
81
81
93
95
86
86
82
82
7.5
93
97
88
88
85
85
97
98
90
90
85
85
11
93
97
88
88
85
85
97
98
90
90
85
85
15
96
97
91
91
88
88
100
100
94
94
88
88
18.5
96
97
91
91
88
88
100
100
94
94
88
88
22
96
97
91
91
88
88
100
100
94
94
88
88
30
99
101
94
94
91
91
102
102
98
98
91
91
37
99
101
94
94
91
91
102
102
98
98
91
91
7
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表8-2 A特性音圧レベル
単位 dB (A)
定格出力
kW
IP2X電動機
IP4X電動機
2極
4極
6極
2極
4極
6極
50Hz
60Hz
50Hz
60Hz
50Hz
60Hz
50Hz
60Hz
50Hz
60Hz
50Hz
60Hz
0.2
−
−
−
−
−
−
72
76
69
69
−
−
0.25
−
−
−
−
−
−
72
76
69
69
−
−
0.37
−
−
−
−
−
−
75
79
71
71
−
−
0.4
−
−
−
−
−
−
75
79
71
71
70
70
0.55
−
−
−
−
−
−
77
81
72
72
71
71
0.75
76
77
72
72
71
71
79
83
73
73
71
71
1.1
70
71
66
66
65
65
73
77
67
67
65
65
1.5
74
75
70
70
67
67
77
80
71
71
67
67
2.2
74
75
70
70
67
67
77
80
71
71
67
67
3.7
78
82
74
74
70
70
82
84
75
75
71
71
5.5
78
82
74
74
70
70
82
84
75
75
71
71
7.5
82
86
77
77
74
74
86
87
79
79
74
74
11
82
86
77
77
74
74
86
87
79
79
74
74
15
85
86
80
80
77
77
89
89
83
83
77
77
18.5
85
86
80
80
77
77
89
89
83
83
77
77
22
85
86
80
80
77
77
89
89
83
83
77
77
30
88
90
83
83
80
80
91
91
87
87
80
80
37
88
90
83
83
80
80
91
91
87
87
80
80
備考 マイクロホンの距離 電動機出力1kW未満 0.5m
電動機出力1kW以上 1.0m
4.6
耐電圧 耐電圧は,7.10によって試験を行ったとき,これに耐えなければならない。
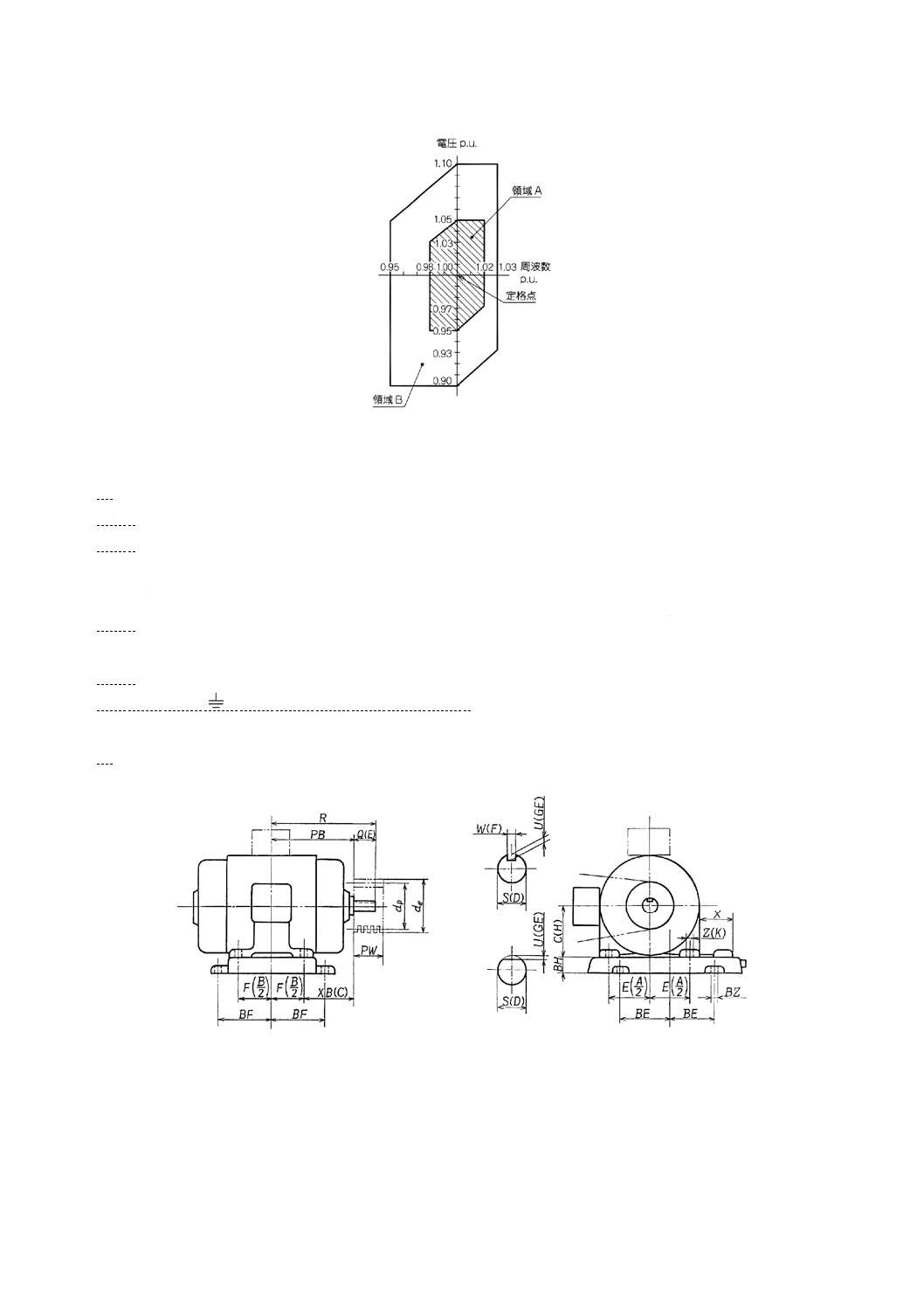
4.7
運転中の電圧及び周波数変動 電源の電圧変化と周波数変化との組合せの適用は,図1の領域A又
は領域Bとする。電動機は,領域A内の電圧変化及び周波数変化に対し,定格トルクにおいて連続的に運
転して,実用上支障があっはならず,領域B内の電圧変化及び周波数に対しては,定格トルクで運転して
実用上支障があってはならない。
なお,領域Bで長時間運転することは望ましくない。
備考 “実用上支障がない”とは,寿命を著しく短縮する程度に至らないことをいい,特性及び温度
上昇などは,定格状態の規定値には必ずしも従わなくてもよい。
8
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 電動機の電圧,周波数
5. 構造
5.1
附属品 電動機には,必要に応じベース,基礎ボルトなどを付ける。
5.2
ケーブル引込口 ケーブル引込口は,特に指定がない限り,連結反対側から見て右側に設ける。
なお,端子箱を設ける場合には,その取付け中心は,連結反対側から見て最上部から右側110度の角度
の範囲内にあるものとする。
5.3
スターデルタ始動器 定格出力11kW以上の電動機は,必要に応じスターデルタ始動器を使用でき
る構造とする。
5.4
接地端子 電動機には,接地導体を接続できるような端子を設けなければならない。接地端子は,
記号又は文字(
又はE)で識別できるようにする。
6. 寸法 電動機各部及びベースの寸法並びに枠番号の適用は,図2,表9及び表10による。また,Vプ
ーリの寸法及び適用は,表11及び図3による。
図2 電動機の寸法記号
9
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
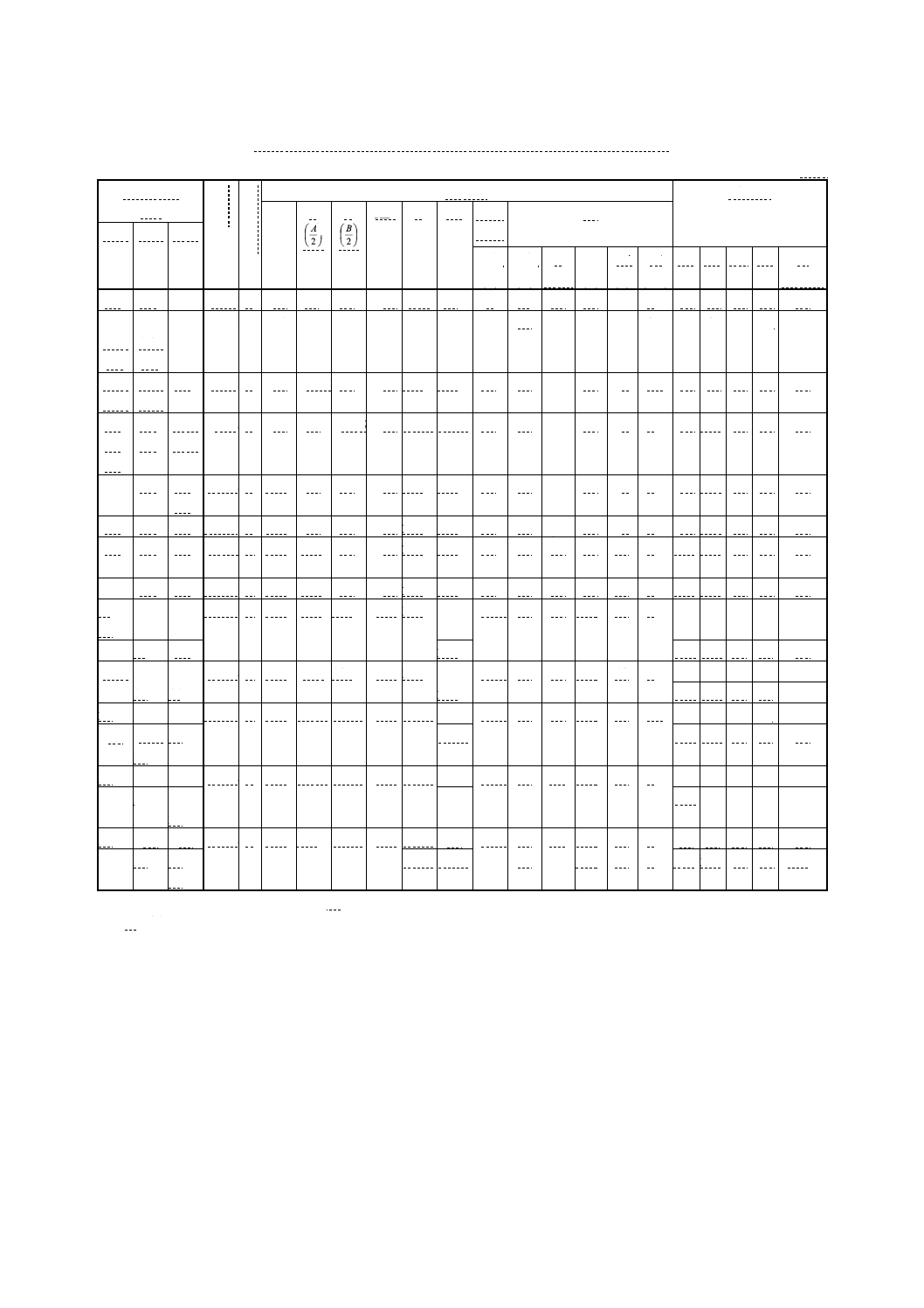
表9 IP2X電動機各部及びベースの寸法並びに枠番号適用
単位 mm
定格出力
kW
枠
番
号
耐
熱
ク
ラ
ス
電動機
ベース
C(1)
(H)
E
2A
F
2B XB
(C)
R
PB 取付
穴径
軸
2極 4極 6極
Z(2)
(K)
S(3)
(D)
S
公差
Q
(E)
W
(F)
U
(GE)
BE BF BH BZ
X
最小値
0.75 0.75 − 80M E
80
62.5 50
50 140 100
10
19
j6
40
6
3.5 65 90 30 13
40
1.1 1.1 0.75 90L
E
90
70
62.5 56 168.5 118.5 10
24
j6
50
8
4
70 105 30 13
40
1.5 1.5
2.2
−
2.2 1.1 100L E 100
80
70
63 193 133
12
28
j6
60
8
4
80 115 40 13
50
1.5
3.7
3.7 2.2 112M E 112
95
70
70 200 140
12
28
j6
60
8
4
95 115 40 13
50
5.5
5.5 3.7 132S B 132 108
70
89 239 159
12
38
k6
80 10
5
110 120 45 13
60
7.5
−
7.5 5.5 132M B 132 108
89
89 258 178
12
38
k6
80 10
5
110 140 45 13
60
11
−
− 160M B 160 127 105 108 323
−
14.5 42
k6 110 12
5
− − − −
−
15
− 11
7.5
213
125 165 50 15
70
18.5 −
− 160L B 160 127 127 108 345
−
14.5 42
k6 110 12
5
− − − −
−
− 15
11
235
125 185 50 15
70
22
−
−
−
48
14
5.5 − − − −
−
− 18.5
−
235
125 185 50 15
70
30
−
− 180M B 180 139.5 120.5 121 351.5 −
14.5 55
m6 110 16
6
− − − −
−
− 22
15
241.5
140 185 55 15
80
30
18.5
37
−
− 180L F 180 139.5 139.5 121 370.5 −
14.5 55
m6 110 16
6
− − − −
−
− 37
22
400.5 260.5
60
140 18
7
140 205 55 15
80
30
−
− 37
200M F 200 159 133.5 133 406.5 266.5 18.5 65
m6 140 18
7
160 210 60 20
100
注(1) C寸法の許容差は,JIS B 0902によって
5.0
0
−mmとする。
(2) Z寸法は,JIS B 1001に規定のボルト穴の3級の値による。
なお,取付穴は,軸に直角方向に長い長穴としてもよい。
(3) S寸法の公差は,JIS B 0401-1及びJIS B 0401-2による。
備考1. 軸端キー及びキー溝は,JIS B 1301による。また,キー溝の寸法許容差は,普通形 (N9) による。
2. 括弧を付けた寸法記号は,IEC 60072-1に規定する寸法記号を示す。
10
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表10 IP4X電動機各部及びペースの寸法並びに枠番号適用
単位 mm
定格出力
kW
枠
番
号
耐
熱
ク
ラ
ス
電動機
ベース
C(1)
(H)
E
2A
F
2B XB
(C)
R
PB 取付
穴径
軸
2極 4極 6極
Z(2)
(K)
S(3)
(D)
S
公差
Q
(E)
W
(F)
U
(GE)
BE BF BH BZ
X
最小値
0.2
0.2
−
63ME
63
50
40
40 103 80
7
11
h6
23 −
1
50 80 30 13
40
0.25 0.25 −
71ME
71
56
45
45 120 90
7
14
j6
30
5
3
55 85 30 13
40
0.37 0.37
0.4 0.4
0.55 0.55 0.4
80ME
80
62.5 50
50 140 100
10
19
j6
40
6
3.5 65 90 30 13
40
0.75 0.75
1.1
1.1 0.55 90LE
90
70
62.5
56 168.5 118.5 10
24
j6
50
8
4
70 105 30 13
40
1.5
1.5 0.75
2.2
− 2.2 1.1 100LE 100
80
70
63 193 133
12
28
j6
60
8
4
80 115 40 13
50
1.5
3.7
3.7 2.2 112ME 112
95
70
70 200 140
12
28
j6
60
8
4
95 115 40 13
50
5.5
5.5 3.7 132SB 132 108
70
89 239 159
12
38
k6
80 10
5
110 120 45 13
60
7.5
− 7.5 5.5 132MB 132 108
89
89 258 178
12
38
k6
80 10
5
110 140 45 13
60
11
−
− 160MB 160 127 105
108 323
−
14.5 42
k6 110 12
5
− − − −
−
15
− 11
7.5
213
125 165 50 15
70
18.5 −
− 160LB 160 127 127
108 345
−
14.5 42
k6 110 12
5
− − − −
−
− 15
11
235
125 185 50 15
70
22
−
− 180MB 180 139.5 120.5 121 351.5 −
14.5 48
k6 110 14
5.5 − − − −
−
− 18.5 15
241.5
140 185 55 15
80
22
30
−
− 180LF 180 139.5 139.5 121 370.5 −
14.5 55 m6 110 16
6
− − − −
−
− 30
18.5
260.5
140 205 55 15
80
22
37
−
− 200LF 200 159 152.5 133 395.5 −
18.5 55 m6 110 16
6
− − − −
−
− 37
30
425.5 285.5
60
140 18
7
160 230 60 20 100
37
備考1. 軸端キー及びキー溝は,JIS B 1301による。また,キー溝の寸法許容差は,普通形 (N9) による。
2. 括弧を付けた寸法記号は,IEC 60072-1に規定する寸法記号を示す。
11
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
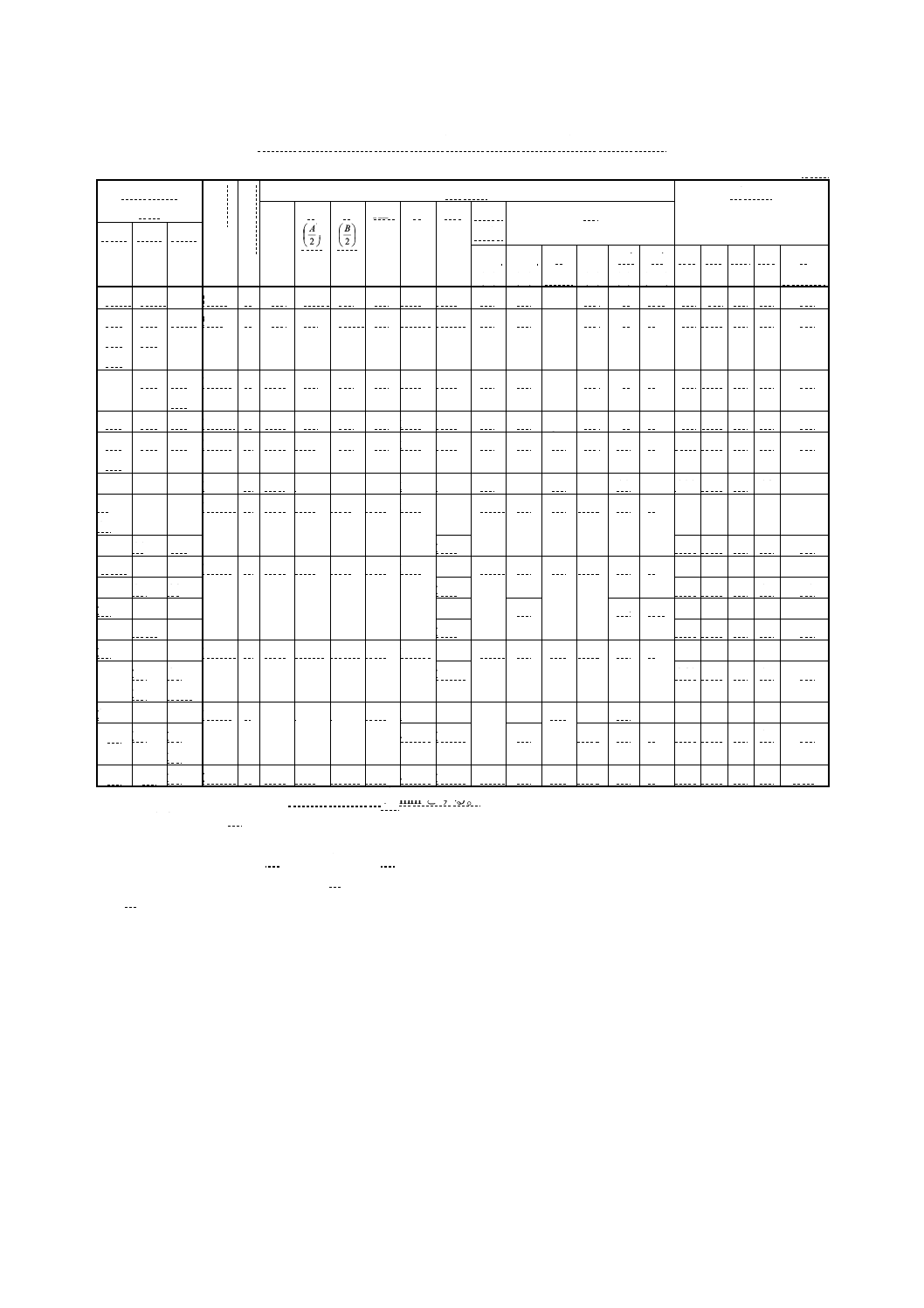
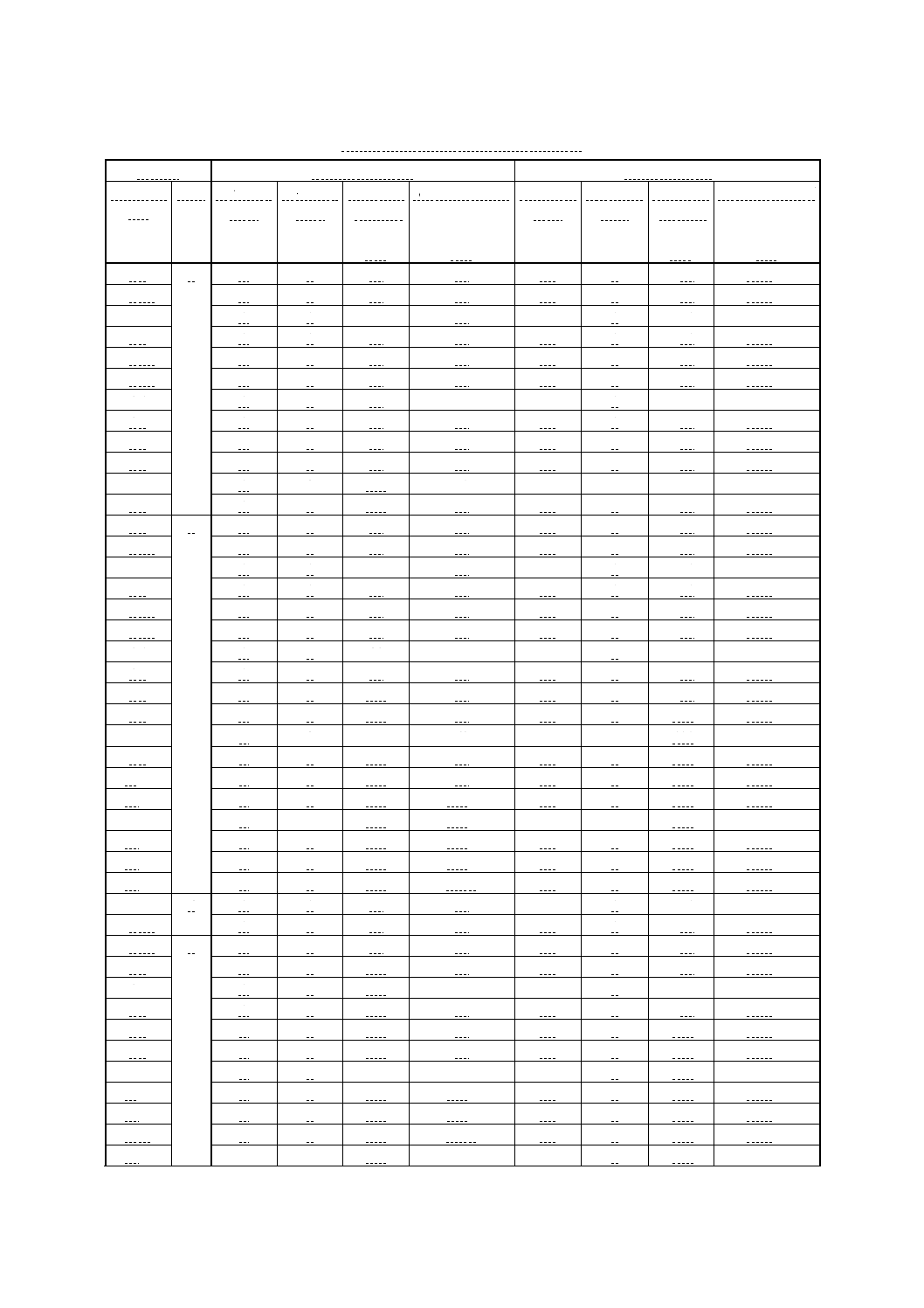
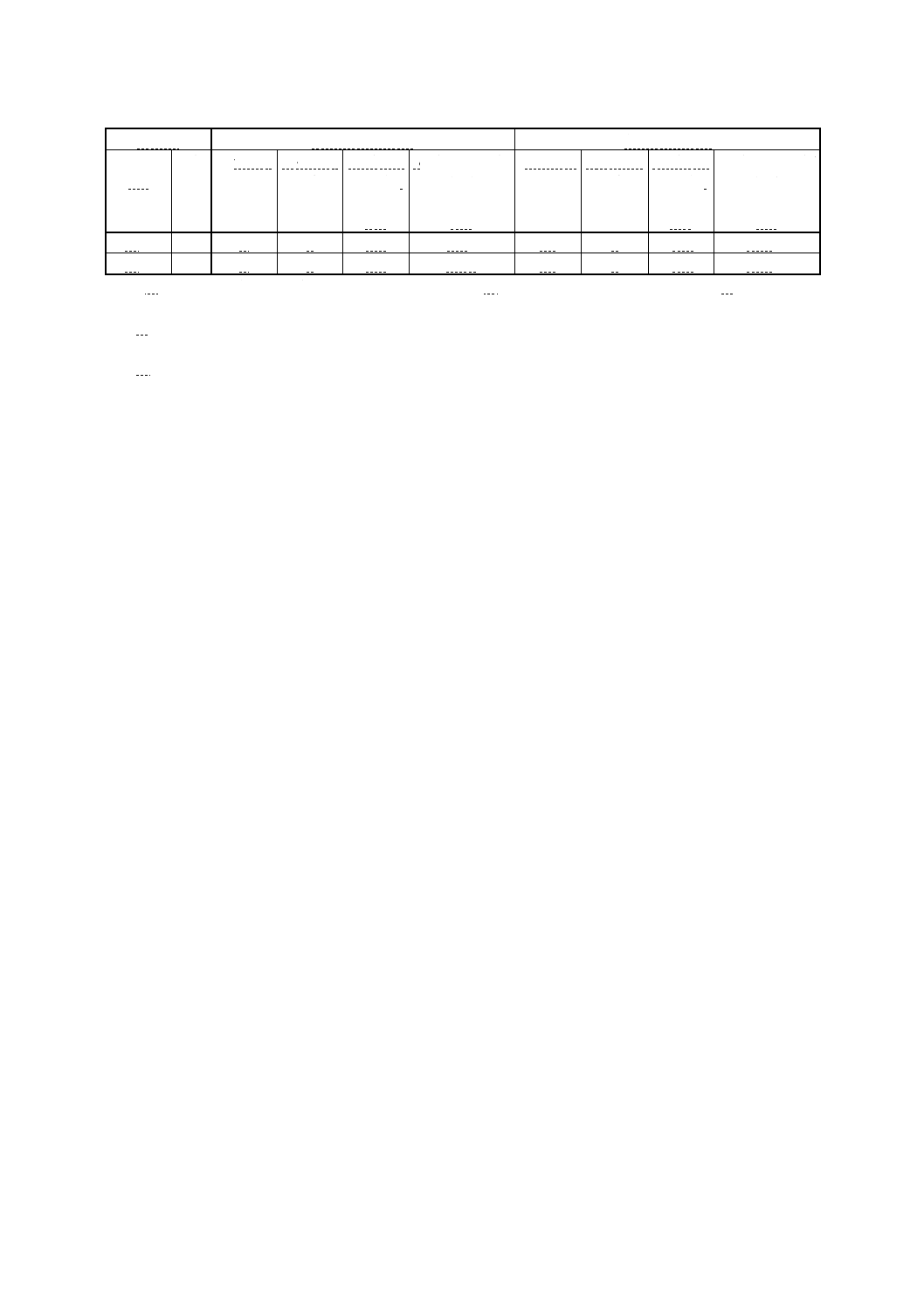
表11 Vベルト及びVプーリ適用
電動機
一般用Vベルト
細幅Vベルト
定格出力 極数 Vベルト Vベルト Vプーリ Vプーリリム幅 Vベルト Vベルト Vプーリ Vプーリリム幅
kW
種類
本数
呼び径
(dp)
(PW)
種類
本数
呼び径
(de)
(PW)
mm
mm
mm
mm
0.2
2
A
1
75
20
3V
1
71
17.4
0.25
A
1
75
20
3V
1
71
17.4
0.37
A
1
75
20
3V
1
71
17.4
0.4
A
1
75
20
3V
1
71
17.4
0.55
A
1
80
20
3V
1
71
17.4
0.75
A
1
80
20
3V
1
71
17.4
1.1
A
2
80
35
3V
1
75
17.4
1.5
A
2
80
35
3V
1
75
17.4
2.2
A
2
90
35
3V
1
75
17.4
3.7
A
3
90
50
3V
2
75
27.7
5.5
A
3
112
50
3V
3
75
38.0
7.5
A
3
132
50
3V
4
80
48.3
0.2
4
A
1
75
20
3V
1
71
17.4
0.25
A
1
75
20
3V
1
71
17.4
0.37
A
1
75
20
3V
1
71
17.4
0.4
A
1
75
20
3V
1
71
17.4
0.55
A
1
80
20
3V
1
71
17.4
0.75
A
1
80
20
3V
1
71
17.4
1.1
A
2
90
35
3V
2
75
27.7
1.5
A
2
90
35
3V
2
75
27.7
2.2
A
2
100
35
3V
2
75
27.7
3.7
A
3
112
50
3V
2
100
27.7
5.5
B
3
125
63
3V
3
100
38.0
7.5
B
3
150
63
3V
3
125
38.0
11
B
4
160
82
3V
4
125
48.3
15
B
5
170
101
3V
6
125
68.9
18.5
B
5
200
101
3V
6
140
68.9
22
B
5
224
101
3V
6
160
68.9
30
C
5
224
136
5V
4
180
77.9
37
C
6
224
161.5
5V
4
200
77.9
0.4
6
A
1
80
20
3V
1
71
17.4
0.55
A
2
80
35
3V
1
75
17.4
0.75
6
A
2
80
35
3V
1
75
17.4
1.1
A
2
100
35
3V
2
75
27.7
1.5
A
2
100
35
3V
2
75
27.7
2.2
A
3
100
50
3V
2
90
27.7
3.7
B
3
125
63
3V
3
100
38.0
5.5
B
3
150
63
3V
3
140
38.0
7.5
B
4
150
82
3V
4
140
48.3
11
B
5
170
101
3V
5
140
58.6
15
B
5
224
101
3V
6
160
68.9
18.5
C
4
224
110.5
5V
3
180
60.4
22
C
5
224
136
5V
4
180
77.9
12
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電動機
一般用Vベルト
細幅Vベルト
定格出力 極数 Vベルト Vベルト Vプーリ Vプーリリム幅 Vベルト Vベルト Vプーリ Vプーリリム幅
kW
種類
本数
呼び径
(dp)
(PW)
種類
本数
呼び径
(de)
(PW)
mm
mm
mm
mm
30
C
5
265
136
5V
4
224
77.9
37
C
6
265
161.5
5V
4
224
77.9
備考1
Vベルトの種類は,一般用Vベルトについては,JIS K 6323,細幅VベルトについてはJIS K 6368の規定
による。
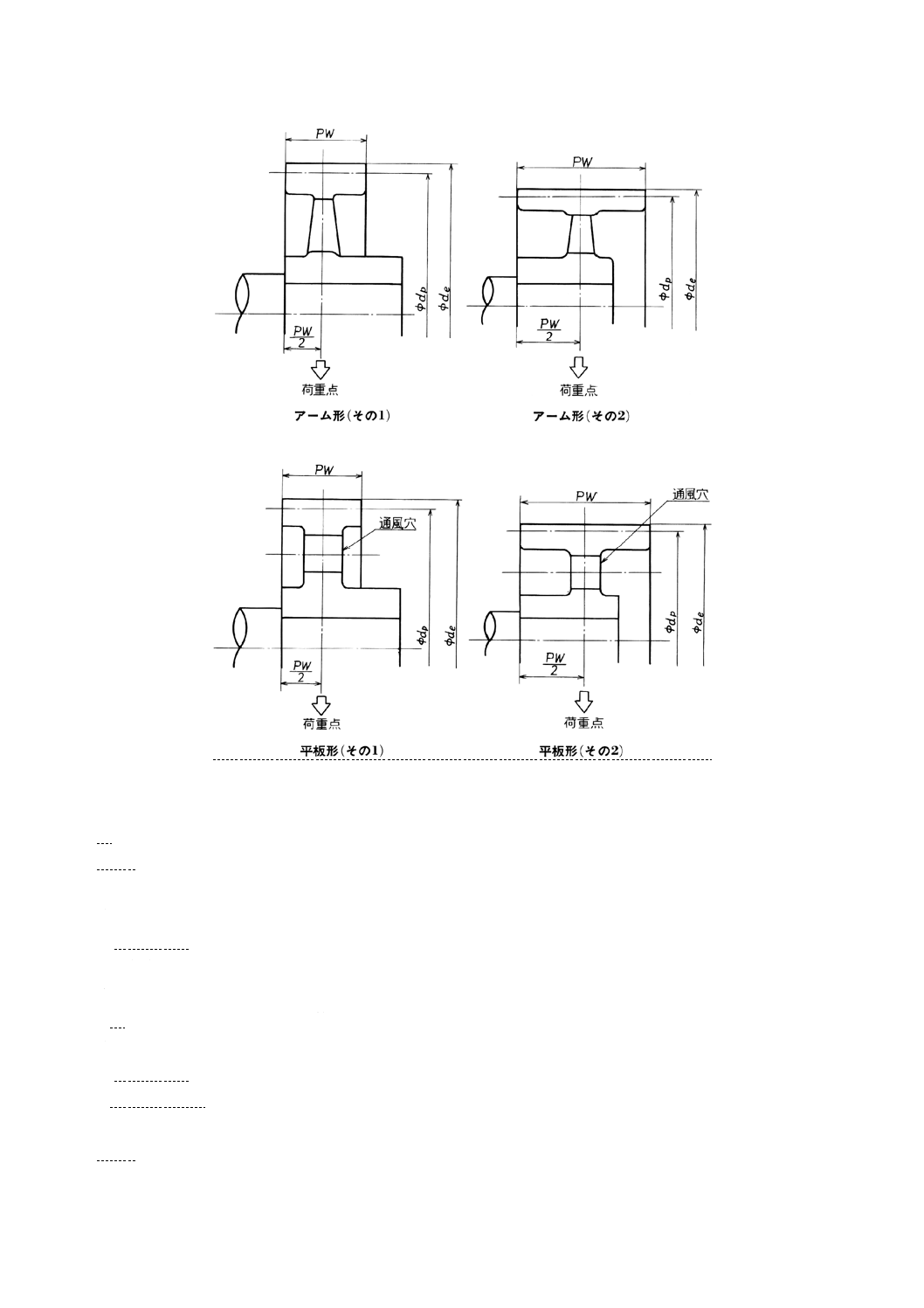
2. 電動機用Vプーリは,電動機の通風冷却を妨げないようにするため通常はアーム形とする。平板形の場合
はできるだけ大きな通風穴を開けるものとする(図3参照)。
3. 電動機にVプーリを取り付ける場合,軸段付部及び軸受に加わる荷重を最小にするためには,Vベルトの
張力による軸の荷重点をできるだけ電動機側にもってくる必要がある。したがって,Vプーリのリム端面
は,図3のように軸段付部と同一面になるよう取り付ける。
13
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 Vプーリの取付方法及び寸法記号
7. 試験方法
7.1
試験の種類 この規格の適用範囲の電動機に対して,通常実施する試験には次の項目が含まれる。
a) 構造試験
b) 抵抗測定
c) 拘束試験
d) 無負荷試験
e) 温度試験
f)
負荷特性及びトルク特性の算定
g) 始動入力特性試験
h) 騒音試験
i)
耐電圧試験
同一設計で製作された電動機ではe)〜h)の試験は,代表1機について行えばよい。
7.2
構造試験 構造試験は,5.及び8.に規定する事項について調べる。
14
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3
抵抗測定 任意の周囲温度で一次端子間の抵抗を測定する。
7.4
拘束試験 任意の周囲温度で回転子を拘束し,一次端子間に定格周波数の電圧を加え,全負荷電流
に近い電流を通じて,そのときの電圧,電流及び入力を測定する。
7.5
無負荷試験 任意の周囲温度で定格電圧及び定格周波数のもとで電動機を無負荷で運転し,入力が
一定になった後,各相に通じる一次電流及び入力を測定する。各相の無負荷電流とその平均値との差は,
平均値の上下5%を超えてはならない。
7.6
温度試験 温度試験は,電動機に定格周波数の定格電圧を加え,定格出力でその温度上昇が一定と
なったと認められるまで連続運転して行う。固定子巻線の温度上昇は,抵抗法によって算出する。固定子
巻線以外の温度は,温度計法によって測定し,温度上昇は,電動機の運転中及び運転停止後において達す
る最高温度と冷媒温度との差をもって表す。
a) 負荷の方法 電動機を,定格出力でその温度上昇が一定となったと認められるまで連続負荷する。た
だし,実負荷法による温度試験を行うことが困難な場合には,等価負荷法によることができる。
b) 冷媒温度の決定法 冷媒温度は,試験される電動機から1〜2m隔たった箇所で,電動機の床上高さの
ほぼ中央の高さに温度計数個を電動機又は他からの熱放射若しくは通風の影響を受けないように設置
して温度を測り,その平均値をとる。温度試験中に冷媒温度が変化する場合には,1時間以下の等間
隔で測定した記録から,全試験中最後の4分の1の時間における平均値を冷媒温度とする。
c) 抵抗法 巻線の抵抗の増加を測定して,巻線の温度上昇を,次の式によって算出する。
(
)(
)
a
a
T
R
R
θ
θ
θ
θ
θ
θ
−
+
+
−
=
−
=
1
1
1
2
2
1
ここに,
θ: 巻線の温度上昇 (K)
R2: 熱状態(温度θ2)における巻線抵抗
R1: 冷状態(温度θ1)における巻線抵抗
θ2: 試験直後における巻線温度 (℃)
θ1: 冷状態においてR1を測定したときの温度 (℃)
θa: 試験における冷媒温度 (℃)
T: 定数
銅に対しては, T=235
アルミニウムに対しては T=225
7.7
負荷特性及びトルク特性の算定 電動機の負荷特性算定には,等価回路法,損失分離法,ブレーキ
法又は動力計法があり,特に指定のない場合は,等価回路法を用いる。また,トルク特性のうち,最大ト
ルクの算定については,等価回路法を用いる。等価回路法において,二重かご形,深みぞかご形など特殊
かご形効果の大きい電動機に対しては拘束試験法A又は拘束試験法Bを用いる。小容量の特殊かご形効果
の小さい電動機に対しては,拘束試験法Cを用いてもよい。
7.7.1
等価回路法
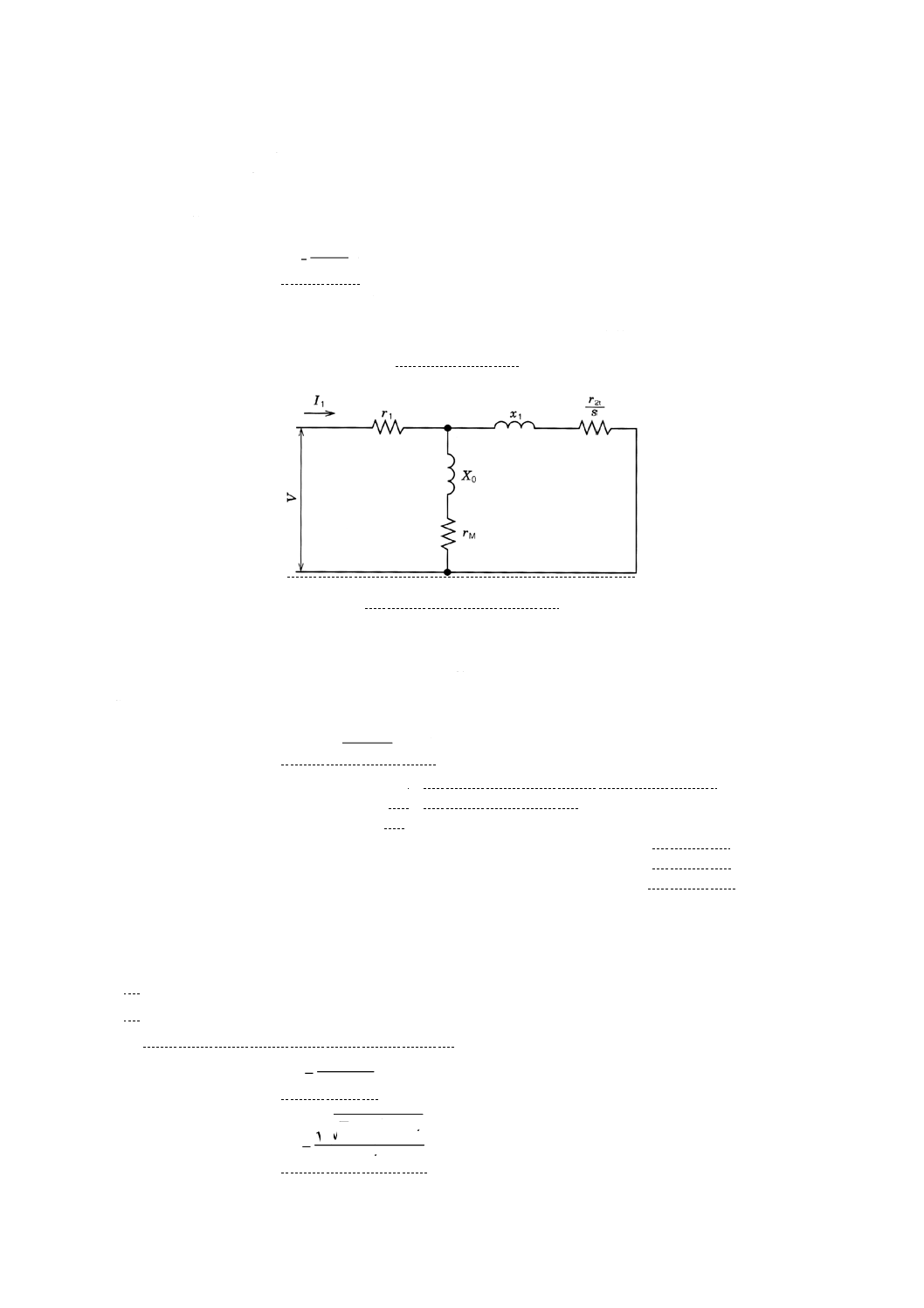
a) 等価回路 等価回路法とは,電動機の1相を図4のT−II形定常等価回路と考えて,回路計算によっ
て特性を求める方法である。ただし,図は星形換算の1相分であり,記号の意味又は定義は,次のと
おりである。
V:一次星形相電圧
I1:一次電流
r1:一次抵抗
rM::鉄損抵抗
s:滑り
15
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
r2t=α2r2
xt=α2 (x2+xM) −αxM
≒x1+x2
X0=αxM=xM+x1
上記計算式における記号の意味又は定義を,次に示す。
M
1
M
x
x
x+
=
α
ここに,
r2: 二次抵抗(一次換算値)
x1: 一次漏れリアクタンス
x2: 二次漏れリアクタンス(一次換算値)
xM: 励磁リアクタンス
図4 T−II形定常等価回路
xtは,大電流の範囲では電流の関数となるので,最大出力及び最大トルクを算定するためのxtの値
を,定格電流の約2倍の電流における拘束試験の結果から求めてもよい。
b) 基本量の算定 図4の等価回路に基づいて特性算定を行うために,次の基本量を求める。
1) 一次巻線抵抗 基準巻線温度における一次巻線の1相の抵抗(星形換算値)は,次のように定める。
)
(
235
235
2
1
1
Ω
+
×
=
t
T
R
r
+
ここに,
R1: 各端子間で測定した一次巻線抵抗の平均値 (Ω)
t: 抵抗測定時の巻線温度 (℃)
T: 基準巻線温度 (℃)
耐熱クラスEの温度上昇の場合 T=75℃
耐熱クラスBの温度上昇の場合 T=95℃
耐熱クラスFの温度上昇の場合 T=115℃
2) 無負荷試験 任意の周囲温度で定格電圧及び定格周波数のもとで電動機を無負荷で運転し,入力が
一定になつた後,一次電圧を定格電圧より少し高い電圧から次第に低下させ,ほぼ同期速度を保つ
最低電圧までの各点で一次電圧,一次電流及び入力を測定する。
2.1)
入力と電圧との関係を表す曲線を,電圧0まで延長して機械損 (Wm) を求める。
2.2)
定格電圧のときの一次電流及び入力から次の計算を行って,機械損がないとした場合の無負荷イン
ピーダンスを求め,更に鉄損抵抗を求める。
21
m
0
0
V
W
W
g
−
=
(
)
21
20
2
0
1
0
3
V
W
I
V
b
−
=
16
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
20
20
0
0
b
g
g
R
+
=
20
20
0
0
b
g
b
X
+
=
rM=R0−r10
ここに,
V1: 定格電圧 (V)
I0: 無負荷時の一次電流 (A)
W0: 無負荷時の入力 (W)
R0: 無負荷インピーダンスの抵抗分 (Ω)
X0: 無負荷インピーダンスのリアクタンス分 (Ω)
rM: 鉄損抵抗 (Ω)
r10: 無負荷試験時温度における一次抵抗(星形換算値) (Ω)
2.3)
拘束試験法Bにおいては,定格電圧の60〜70%程度の電圧 (V1') のときの一次電流 (I0') 及び入力
(W0') からb)2.2)と同様の計算を行って,rM'及びX0'を求める。
3) 拘束試験 次の3.1)〜3.3)のいずれかの拘束試験法によって回路定数r2t及びxtを求める。
3.1)
拘束試験法A
3.1.1) 定格周波数拘束試験 定格周波数において拘束試験を行う。定格電流又はそれに近い一次電流 (IS)
が流れたときの印加電圧 (VS) 及び入力 (WS) から,
一相の等価インピーダンス
S
S
S
3I
V
Z=
ZSの抵抗分
2S
S
S
3I
W
R=
ZSのリアクタンス分
2S
2S
S
R
Z
X
−
=
を求める。
3.1.2) 1/2定格周波数拘束試験 定格周波数のほぼ1/2の周波数において拘束試験を行う。定格電流又はそ
れに近い一次電流 (IS) が流れたときの印加電圧 (VS') 及び入力 (WS') から
一相の等価インピーダンス
S
S
S
3I
V
Z
′
′
=
′
ZS'の抵抗分
2
S
S
S
3I
W
R
′
′
=
′
ZS'のリアクタンス分
2
S
2
S
S
R
Z
X
′
−
′
=
′
を求める。
3.1.3) 運転時の定数の算定 定格周波数をfR,1/2定格周波数拘束試験の周波数をfLとし,次の計算を行
って運転時の回路定数r2t及びxtを求める。
Rf
f
k
L
=
k
X
X
S
S
′
=
′′′
S
S
S
S
R
R
X
X
h
′
−
−′′′
=
17
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
2
2
1
)
1(
k
h
k
m
−
+
=
)]
(
[
13
.1
)]
(
[
16
.0
)
(
S
S
S
S
S
S
S
S
S
R
R
m
R
R'
R
m
R
R
R
m
R
R
′
−
−
′
×
=
−
−
′
×
=
′
−
−
′
=
(耐熱クラスEの温度上昇の場合)
(耐熱クラスBの温度上昇の場合)
(耐熱クラスFの温度上昇の場合)
1
2
r
R
RT
−
=
)
(
S
S
S
T
X
X
m
X
X
−′′′
+′′′
=
2T
T
2
T
2
3
X
R
R
g
+
=
2
T
2
2T
T
3
X
R
X
b
+
=
′
20
2
M
M
M
X
r
r
g
+
=
20
2
M
0
M
X
r
X
b
+
=
M
3
2
M
3
2
b
b
b
g
g
g
−
′
=
′
−
′
=
′
2
2
2
2
2
t2
b
g
g
r
′
+
′
′
=
2
2
2
2
2
t
b
g
b
x
′
+
′
′
=
更に,2倍電流の拘束試験によって最大出力及び最大トルクを求める場合は,定格電流の約2倍
に等しい電流を流して定格周波数拘束試験と1/2定格周波数拘束試験を行い,同様の計算でr2t及び
xtに対応した定格電流の約2倍の電流におけるr2tm及びxtm求める。
3.2)
拘束試験法B
3.2.1) 1/2定格周波数拘束試験 7.7.1のb)3.1)と同様の方法で,RS'及びXS'を求める。更に,この試験にお
ける周波数をfLとするとき,
R
L
f
f=kとして次の計算によって滑りがkに等しい場合のr2tS'及びxtS'を
求める。
R2S'=RS−r1S
ここに,r1Sは,拘束試験時温度における一次巻線抵抗(星形換算値)である。
2
S
2
S
2
S
2
S
3
'
X
'
R
'
R
'
g
+
=
2
S
2
S
2
S
S
3
'
X
'
R
'
X
'
b
+
=
2
0
2
M
M
M
'
kX
'
kr
'
r
'
g
+
=
2
0
2
M
0
M
'
kX
'
kr
'
X
'
b
+
=
18
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
'
g
'
g
'
g
M
S
3
S
2
−
=
'
b
'
b
'
b
M
S
3
S
2
−
=
S1
1
2
S
2
2
S
2
S
2
tS
2
r
r
'
b
'
g
'
g
'
r
×
+
=
2
S
2
2
S
2
S
2
tS
1
'
b
'
g
'
b
k
'
x
+
×
=
3.2.2) 1/4定格周波数拘束試験 定格周波数のほぼ1/4の周波数において拘束試験を行う。定格電流又はそ
れに近い一次電流 (IS) が流れたときの印加電圧 (VS'') 及び入力 (WS'') から
一相の等価インピーダンス
S
S
S
3I
V
Z
′′
′′
=
′′
ZS''の抵抗分
2
S
S
S
3I
W
R
′′
′′
=
′′
ZS''のリアクタンス分
2
S
2
S
S
R
Z
X
′′
−
′′
=
′′
を求める。更に,この試験における周波数を蕨fL'とするとき,
'k
f
'
f=
R
L
として,次の計算を行う。
R2S''=RS''−r1S
ここに,3.2.1)におけるR2S', XS'及びkの代わりに各々R2S'',XS''及びk'を用いて滑りがk'に等し
い場合のr2tS''及びxtS''を求める。
3.2.3) 運転時の定数の算定 次の計算を行って運転時の回路定数r2t及びxtを求める。
)
(
tS
2
tS
2
L
L
L
tS
2
t2
''
r
'
r
'
f
f
f
'
r
r
−
−
−
=
)
(
tS
tS
L
L
L
tS
t
'
x
''
x
'
f
f
f
'
x
x
−
−
+
=
更に,2倍電流の拘束試験によって最大出力及び最大トルクを求める場合は,定格電流の約2倍
に等しい電流を流して1/2定格周波数拘束試験と1/4定格周波数拘束試験を行い,同様の計算でr2t
及びxtに対応した定格電流の約2倍の電流におけるr2tm及びxtmを求める。
3.3)
拘束試験法C
3.3.1) 定格周波数拘束試験 3.1.1)と同様の方法でRS及びXSを求める。
3.3.2) 運転時の定数の算定 運転時の回路定数r2t及びxtを次の計算によって求める。
R2S=RS−r1S
2
S
2
S
2
S
2
S
3
X
R
R
g
+
=
2
S
2
S
2
S
S
3
X
R
X
b
+
=
2
0
2
M
M
M
X
r
r
g
+
=
2
0
2
M
0
M
X
r
X
b
+
=
19
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
g2S=g3S−gM
b2S=b3S−bM
2
S
2
2
S
2
S
2
t2
b
g
g
r
+
=
(耐熱クラスEの温度上昇の場合)
2
S
2
2
S
2
S
2
06
.1
b
g
g
+
×
=
(耐熱クラスBの温度上昇の場合)
2
S
2
2
S
2
S
2
13
.1
b
g
g
+
×
=
(耐熱クラスFの温度上昇の場合)
2
S
2
2
S
2
S
2
t
b
g
b
x
+
=
c) 特性算定
1) 定格出力PR (W) に対する特性 任意の滑りsに対して,次の計算を行う。
2t
2
t2
t2
2
x
s
r
s
r
g
+
=
2t
2
t2
2
x
s
r
xt
b
+
=
20
2
M
M
M
X
r
r
g
+
=
20
2
M
0
M
X
r
X
b
+
=
g3=gM+g2
b3=bM+b2
23
23
3
3
b
g
g
r
+
=
23
23
3
3
b
g
b
x
+
=
R=r1+r3
X=x3
2
2
X
R
Z
+
=
3
1V
V=
一次電流
Z
V
I=
1
一次入力
P1=3I12R
一次抵抗損
WC1=3I12r1
二次抵抗損
WC2=3It2r2t
20
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ただし,
23
23
22
22
1
t
b
g
b
g
I
I
+
+
×
=
漂遊負荷損
WG=0.005×PR
鉄損
M
2
gM
h
3
g
I
W=
ただし,
23
23
M
1
gM
b
g
g
I
I
+
×
=
全損失
Wt=WC1+WC2+WG+Wh+Wm
電動機出力
P2=P1−Wt (W)
ここに,計算された出力 (P2) と定格出力 (PR) との差は,0.1%以下とする。
効率
(%)
100
1
2×
=PP
η
力率
(%)
100
×
=ZR
pf
トルク
m)
(N
)
1(
549
.9
S
2
・
n
s
P
−
×
=
τ
ここに, ns: 同期速度 (min−1)
2) 任意の出力 (P) に対する特性 1)の計算式において
漂遊負荷損
W)
(
005
.0
2
tR
t
R
G
×
×
=
I
I
P
W
ここに, ItR: Itの定格出力における電流値
として,任意の滑り (s) に対する特性を求める。ただし,計算された出力 (P2) と任意の出力 (P) と
の差は,0.1%以下とする。
7.7.2
損失分離法 損失分離法は,三相誘導電動機に対して,一次巻線の抵抗測定と無負荷試験とを行い,
更に任意の周囲温度で,定格電圧及び定格周波数において無負荷から約125%負荷にわたる範囲で電動機
を運転し,そのときの一次電流,入力及び滑りを測定し,これらの結果から次の式によって特性を算定す
る方法である。
出力P=[負荷時入力]−[一次抵抗損]−[二次抵抗損]−[鉄損]−[滑りsにおける機械損]−
[漂遊負荷損](W)
一次抵抗損 WC1=3I12r1 (W)
無負荷試験時の機械損をWm (W) とし,実運転温度相当の滑りを求めるために固定子巻線抵抗値比によ
って滑りを補正すれば,
温度補正後の滑り
s'=s (2r1/R1')
二次抵抗損
WC2=s'×[二次入力]
=s' {P1−1.5I12R1'−(W0−1.5I02R1−Wm)} (W)
鉄損
Wh=W0−1.5I02R1−Wm (W)
滑りs'における機械損= (1−s') Wmと置いてこれらの値を出力の式に代入すると,
出力
P=P−WG (W)
P'=P1−3I12r1−s' {P1−1.5I12R1'−(W0−1.5I02R1−Wm)}−(W0−1.5I02R1−Wm)−(1−s') Wm (W)
= (1−s') {P1−(W0−1.5I02R1)}−3I12r1+1.5s'I12R1' (W)
21
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
=
−
'
R
r
s
1
1
2
1
{P1− (W0−1.5I02R1)} −3 (1−s) I12r1 (W)
R
2
G
005
.0
P
'
P
W=
(W)
として出力が求められる。これから,効率及び力率は,次の式で求める。
効率
100
1
×
=PP
η
(%)
力率
100
3
1
1
1
×
=
I
V
P
pf
(%)
ここに,
P1: 負荷時の入力 (W)
W0: 無負荷時の入力 (W)
s: 滑り (p. u.)
r1: 基準巻線温度に換算した一次巻線1相の抵抗値 (Ω)
R1:
無負荷試験時に各端子間において測定した一次巻線抵抗の平
均値 (Ω)
R1': 負荷測定時において各端子間で測定した一次巻線抵抗の平均
値 (Ω)
I1: 負荷時一次電流 (A)
I0: 無負荷電流 (A)
V1: 定格電圧 (V)
WG: 漂遊負荷損 (W)
PR: 定格出力 (W)
7.7.3
ブレーキ法又は動力計法 ブレーキ法又は動力計法とは,電動機の負荷として機械的ブレーキ又は
動力計を直結し,電動機の電気的入力及び機械的出力を直接測定して,その差から特性を算定する方法で
ある。
ブレーキ法は,主に1kW以下の電動機に適用される。
a) 無負荷試験 任意の周囲温度で定格電圧及び定格周波数のもとで電動機を無負荷で運転し,入力が一
定になった後,一次電圧を定格電圧より少し高い電圧から次第に低下させ,ほぼ同期速度を保つ最低
電圧までの各点で一次電圧,一次電流及び入力を測定する。再度,定格電圧に戻し,入力が一定にな
った後,電動機を停止し,各端子間の抵抗を測定する。次の値を算定する。
1) 機械損 入力と電圧との関係を表す曲線を,電圧0まで延長して機械損 (Wm) を求める。
2) 鉄損 定格電圧での一次電流,入力及び各端子間の抵抗の平均値から次の式によって求める。
鉄損
m
0
20
0
h
2
3
W
R
I
W
W
−
−
=
(W)
ここに,
I0: 定格電圧での無負荷一次電流 (A)
W0: 定格電圧での無負荷入力 (W)
R0: 各端子間の抵抗の平均値 (Ω)
b) 負荷特性試験
1) 25%負荷から150%負荷までの間でほぼ等間隔の6点の負荷に対して,入力,電流,滑り,トルク及
び固定子巻線抵抗値を測定する。
2) 電気的入力と機械的出力との差が見掛けの総損失であるが,この総損失は,算定可能な損失と漂遊
負荷損とに分離される。
22
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電動機出力は,トルクと回転速度とから,
549
.9
n
T
P
×
=
(W)
ここに,
P: 電動機出力 (W)
T: トルク (N・m)
n: 回転速度 (min−1)
で求められ,この値と電気的入力とから総損失は,
Wt=P1−P (W)
ここに,
P1: 電気的入力 (W)
Wt: 総損失 (W)
として求められる。
算定可能な損失は,
一次抵抗損
WC1=3I12r1 (W)
無負荷試験から算定される機械損
Wm (W)
無負荷試験から算定される鉄損
Wh (W)
二次抵抗損
WC2=s×[二次入力]
=s× (P1−WC1−Wh) (W)
ここに,
r1: 各測定点における一次巻線一相の抵抗値 (Ω)
I1: 負荷時一次電流 (A)
s: 滑り (p,u.)
であるから,漂遊負荷損暫定値WG'は,
WG'=Wt− (WC1+Wm+Wh+WC2) (W)
と求められる。
3) 6点の負荷について漂遊負荷損暫定値を算定し,これをトルクの2乗に対する直線回帰分析を実施
して漂遊負荷損を平滑化する。
WG''=AT2+B (W)
ここに,
WG'': 漂遊負荷損平滑値 (W)
A: 回帰直線の傾斜
B: 回帰直線の修正差
ここで,相関係数rを算定し,もし,傾斜Aが負であるか,又は相関係数rが0.9以下のときは,
最も直線から外れている1点を削除してA,B及びrを再計算し,rが0.9以上になったときは,こ
の結果を採用する。再計算結果でも相関係数rが0.9未満の場合は,この試験は無効として再試験
を実施する必要がある。
平滑化された漂遊負荷損の値は,次の式による。
WG=AT2 (W)
4) 以上の結果から,効率は次の式によって一次抵抗損及び二次抵抗損を補正して算定する。
一次抵抗損
WC1'=3I12r1' (W)
二次抵抗損
W)
(
1
1
C2
C2
r
'
r
W
'
W
×
=
効率
(%)
100
1
2
C1
m
h
G
1
×
−
−
−
−
−
=
P
'
W
'
W
W
W
W
P
C
η
ここに, r1': (25℃+定格負荷における温度上昇値)に換算した一次巻線一相の抵抗値 (Ω)
5) この試験に使用する動力計の定格は誘導機の定格の3倍を超えず,また,動力計は誘導機の定格ト
23
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ルクの0.25%のトルクを感知できなければならない。
参考 漂遊負荷損測定値WG1'のトルクT1への回帰直線,相関係数の求め方
回帰直線
WG''=AT2+B
[
]
∑
∑
∑
∑
∑
=
=
=
=
=
−
−
=
N
i
N
i
N
i
N
i
N
i
i
T
T
N
'
W
T
'
W
T
N
A
1
2
1
2i
2
2i
1
1
Gi
1
2i
Gi
2
)
(
)
(
∑
∑
=
=
−
=
N
i
N
i
i
G
T
N
A
'
W
N
B
1
1
2
i
1
1
相関係数
r
[
]
−
−
−
=
∑
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
=
N
i
N
i
N
i
N
i
i
N
i
N
i
N
i
i
'
W
'
W
N
T
T
N
'
W
T
'
W
T
N
r
1
2
1
Gi
2
Gi
1
2
1
2i
2
2
1
1
Gi
1
2i
Gi
2
)
(
)
(
7.7.4
最大トルク及び最大出力の算定 最大トルクmax
τ
及び最大出力Pmaxを与える滑りst及びspをそれ
ぞれ,
2t
2
t2
1
t2
t2
p
2t
2
1
t2
t
)
(
x
r
r
r
r
s
x
r
r
s
+
+
+
=
+
=
として求め,これらを7.7.1のc)1)の滑りsの代わりに用いて最大トルク及び最大出力を求める。更に高
い計算精度を必要とする場合には7.7.1のc)1)の計算において滑りsを変化させて最大トルク及び最大出力
を求めてもよい。ただし,漂遊負荷損は7.7.1のc)2)に示す計算式による。2倍電流の拘束試験によって最
大トルク及び最大出力を求める場合は,r2t及びxtの代わりにr2tm及びxtmを用いる。
7.7.5
最小始動トルクの算定 最小始動トルクは,次の式によって算定する。
R
2
S
St
1
2
S
S
R
R
ST
2
3
)
1(
P
'I
'
I
R
'
I
'
W
S
−
−
=
τ
τ
定格トルク
最小始動トルク
ここに,
PR: 定格出力 (W)
SR: 定格出力時の滑り (p.u.)
IS': 定格電流にほぼ等しい拘束電流 (A)
R1: 各端子間において測定した一次巻線抵抗の平均値 (Ω)
であり,一定の拘束電流IS'における拘束電圧の回転子位置による変化が著しくない場合は,
Ist'=Ist (A)
ここに,
Ist: 最大始動電流 (A)(7.8参照)
WS': 拘束電圧がその最大値と最小値の平均値に等しくなるよう
24
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
な回転子位置における入力 (W)
とし,一定の拘束電流IS'における拘束電圧の回転子位置による変化が著しい場合は,
A)
(
)
(
)
(
'
max
S
min
S
St
St
'
V
'
V
I
I=
ここに, (VS') min: 拘束電流IS'に対する拘束電圧の最小値 (V)
(VS') max: 拘束電流IS'に対する拘束電圧の最大値 (V)
WS': 拘束電流IS',束電圧 (VS') maxのときの入力 (W)
とする。
始動装置を用いる電動機の場合,その始動方式における最小始動トルクは,電源側の最大始動電流が流
れるときの電動機電流を上記の算定法におけるIstとして用いて算定する。
7.7.6
プルアップトルクの算定 プルアップトルクは,定格電圧に近い電圧を印加して測定する。しかし,
定格電圧に近い電圧を印加することが困難な場合には,低電圧におけるプルアップトルクを測定して,次
の式によって定格電圧時のプルアップトルクを算定する。ただし,VP2はVP1の2倍以上が望ましく,VP1
は,定格電圧の20%以上が望ましい。
k
V
V
T
T =
P2
1
u2
ur
=
P1
P2
u1
u2
log
log
V
V
T
T
k
ここに,
V1: 定格電圧 (V)
VP2: プルアップトルク測定時のVP1よりも高い印加電圧 (V)
VP1: プルアップトルク測定時のVP2よりも低い印加電圧 (V)
Tur: 定格電圧時のプルアップトルク(定格トルクに対する比)
Tu2: 電圧VP2を印加したときの測定プルアップトルク(定格トル
クに対する比)
Tu1: 電圧VP1を印加したときの測定プルアップトルク(定格トル
クに対する比)
7.8
始動入力特性試験 始動入力特性は,拘束試験の結果から次のa)〜d)のいずれかの方法で最大始動
電流Istを求め,次の式によって定格出力 (kW) に対する始動入力 (kVA) の比を算定する。
×
×
=
kW
kVA
10
10
3
kVA
kW
3
R
3
St
1
−
−
)の比
)に対する始動入力(
定格出力(
P
I
V
a) 正比例法 拘束試験を定格電流のほぼ100%の電流について行い,その結果から次の式によって計算
する。
A)
(
s1
1
s1
st
=
V
V
I
I
ここに,
V1: 定格電圧 (V)
Vs1: 拘束試験で加えた電圧 (V)
Is1: 拘束電流 (A)(各線電流の平均値)
b) 対数比例法(I) 拘束試験を定格電流のほぼ100%及び200%の電流について行い,そのときの拘束電流
25
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Is1,Is3 (A) 及びそれぞれに対応する拘束電圧Vs1及びVs3 (V) を測定し,次の式によって最大始動電流
を計算する。この算定法は,全閉スロット機に適用する。
(A)
s1
1
s1
st
β
=
V
V
I
I
β=0.7α+0.35
=
S1
S3
S1
S3
log
log
V
V
I
I
α
c) 対数比例法 (II) 対数比例法 (I) の拘束試験のほかに定格電流のほぼ150%の電流について拘束試験
を行い,そのときの拘束電流Is2 (A) 及びそれに対応する拘束電圧Vs2 (V) を測定し,次の式によって
最大始動電流を計算する。この算定法は,半閉スロット機及び開放スロット機に適用する。
A)
(
04
.1
S3
1
3
S
St
r
V
V
I
I =
r=1.05r2−0.35 (r1−1) (r2>r1のとき)
=0.7r2+0.35
(r2≦r1のとき)
=
S1
S2
S1
S2
1
log
log
V
V
I
I
r
=
S2
S3
S2
S3
2
log
log
V
V
I
I
r
d) 対数比例法 (III) 正比例法の拘束試験のほかに定格周波数の下で定格電圧に近い電圧を加えて始動
させ,そのきの電圧V1' (V) 及び電流Ist' (A) を測定し,次の式によって最大始動電流を計算する。
(A)
1
1
St
St
α
=
'
V
V
'
I
I
=
S1
1
S1
St
log
log
V
'
V
I
'
I
α
なお,始動試験時の電圧V1'は,定格電圧の60%以上が望ましい。
備考 始動試験時の電流は,過渡現象消滅後の値を測定する。
7.9
騒音試験 電動機を定格電圧及び定格周波数で無負荷運転した場合の騒音レベルを測定する。
a) 測定条件
1) 据付け 測定は暗騒音及び周囲からの反射音ができるだけ少なく,また,変化の少ない場所を選び,
26
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
かつ,弾性体上で行うことが望ましい。
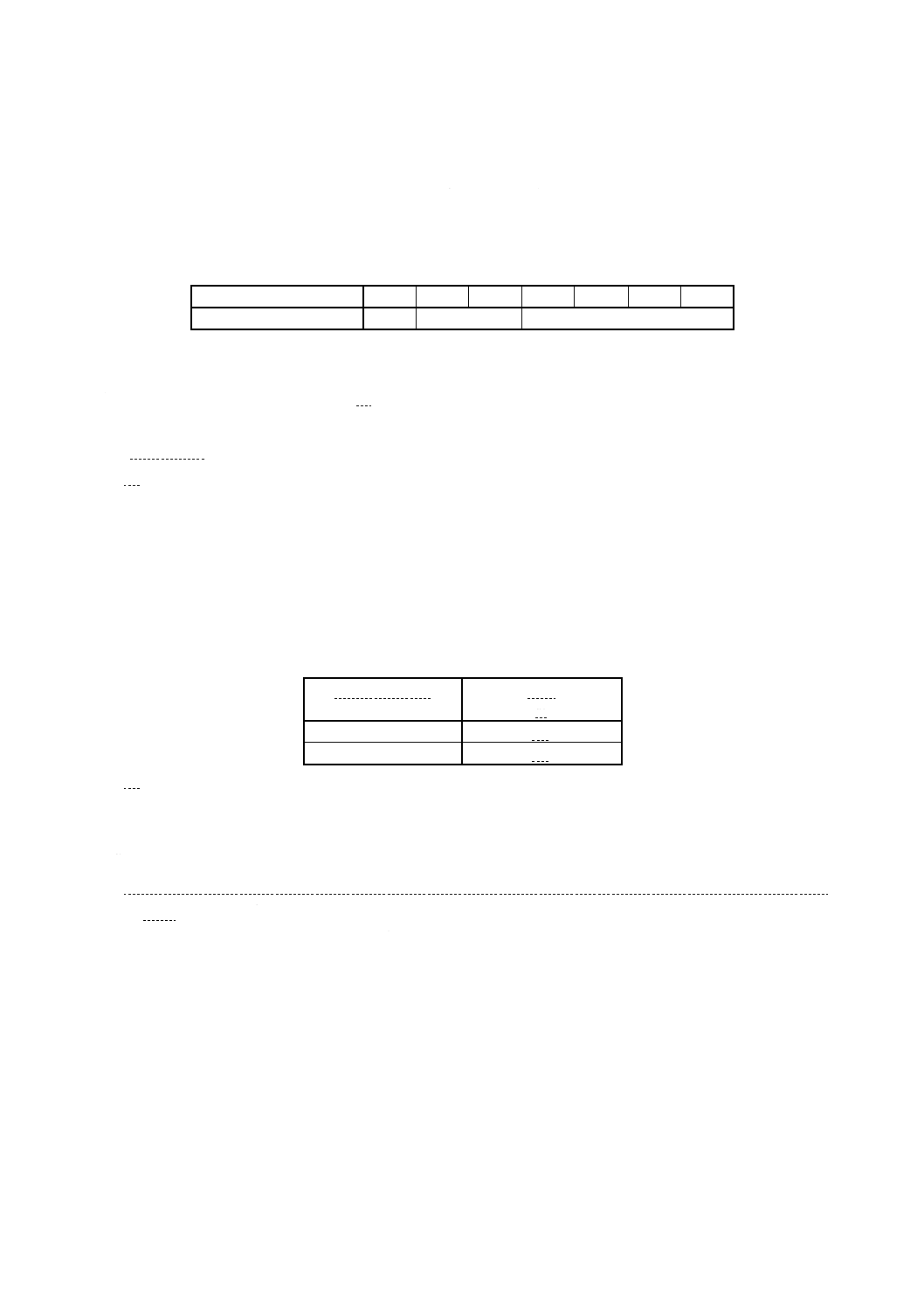
2) 暗騒音の影響 合成騒音と暗騒音との差が10dB以上のときは,暗騒音の影響を無視してよい。そ
の差が10dB未満のときは,表12によって補正をして対象の音の騒音を推定することができる。両
者の差が少ないとき,特に3dB未満のときは測定値には信頼性がない。
表12 暗騒音の影響に対する補正
単位 dB
合成騒音と暗騒音との差
3
4
5
6
7
8
9
補正値
−3
−2
−1
3) 反射音の影響 電動機表面からマイクロホンまでの距離に対して,騒音レベルが一様に減少し,か
つ,距離を2倍にしたとき,約4dB以上減少するような場所を選ぶことが望ましい。
b) 音圧レベルの測定 測定には,JIS C 1502に適合した普通騒音計を使用し,周波数補正はA特性とす
る。騒音計の指示が変動するときは,数回の測定の平均値とする。
1) 測定位置
1.1)
横軸機の測定 測定位置は,軸中心線を含む水平面上の軸方向及び固定子枠のほぼ中心で軸と直角
方向の4点で,表13に示す距離で行う。ただし,表13に示す距離で測定するのが不適当な場合,
例えば,測定すべき騒音レベルと暗騒音が著しく接近している場合,又は反射音の影響が顕著な場
合には表13以外の距離を選定してもよいが,この場合にはマイクロホン距離を明記しておかなけれ
ばならない。
なお,マイクロホンは電動機自身の冷却風の影響を受けないところに置く。距離のとり方は,軸
を除く電動機表面から測定する。
表13 マイクロホンの距離
電動機定格出力
距離
m
1kW未満
0.5
1kW以上
1.0
1.2)
立軸機の測定 立形電動機の場合は,固定子枠のほぼ中心を通る水平面で横軸機に準じて行う。
2) 騒音の音圧レベルの算出方法 測定値の相加平均をもって電動機の騒音の音圧レベルとする。
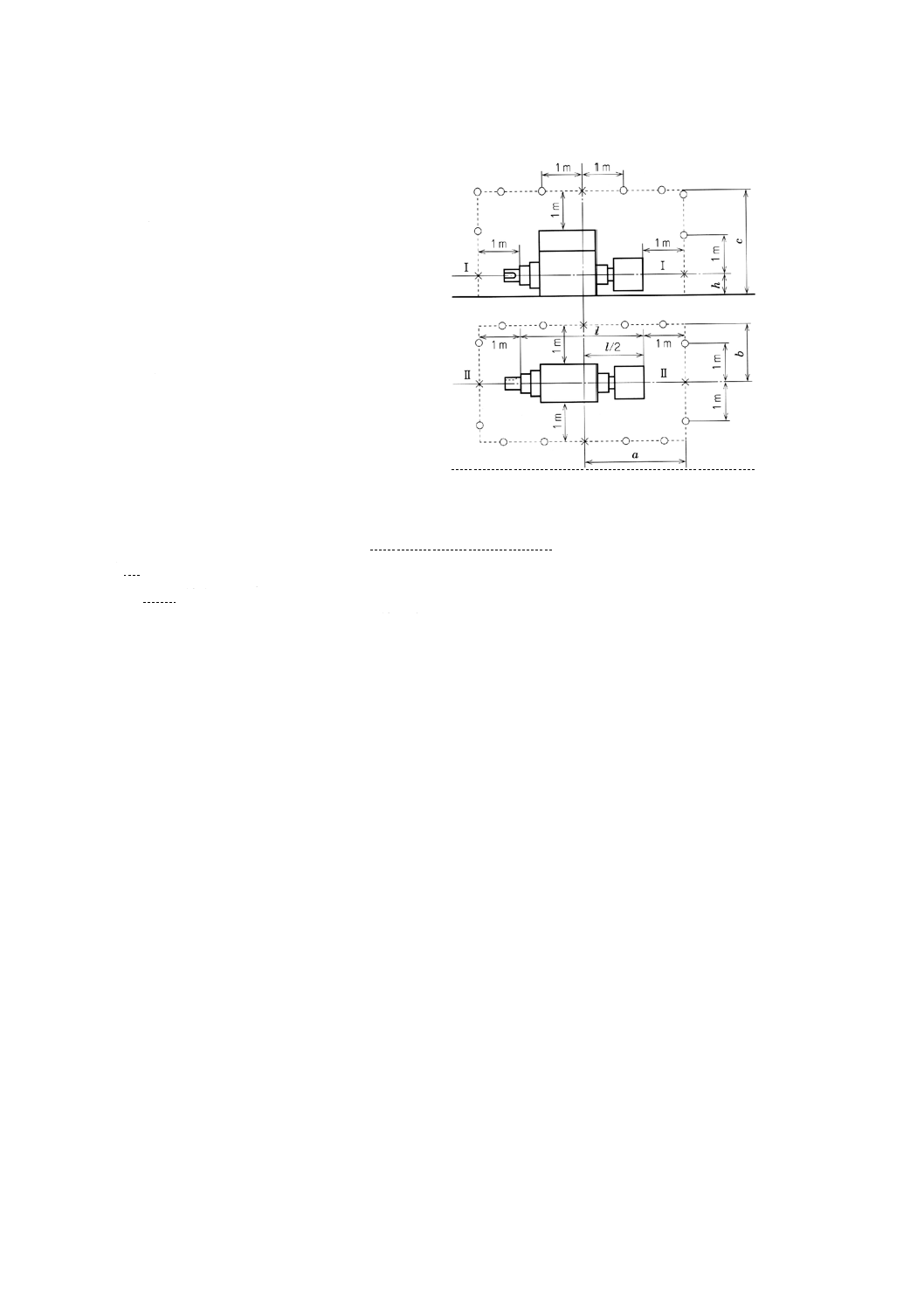
c) 音響パワーレベルの測定
1) 測定位置
1.1)
横軸機の測定 図5の基準測定点(×印)及び基準測定点から1mピッチの各点(○印)で騒音レ
ベル (dB) を測定する。
図5a)による測定位置は,軸中心線を含む垂直面上の位置を示し,また,図5b)による測定位置は,
軸中心線を含む水平面上の位置を示す。
27
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) b)図のII−II線に沿う縦断面
b) a)図のI−I線に沿う横断面
h:軸心高さ(ただし,h≦0.25mのときは,h=0.25mとする。)
l:電動機全長(軸端を除く。)
図5 測定位置(横軸機)
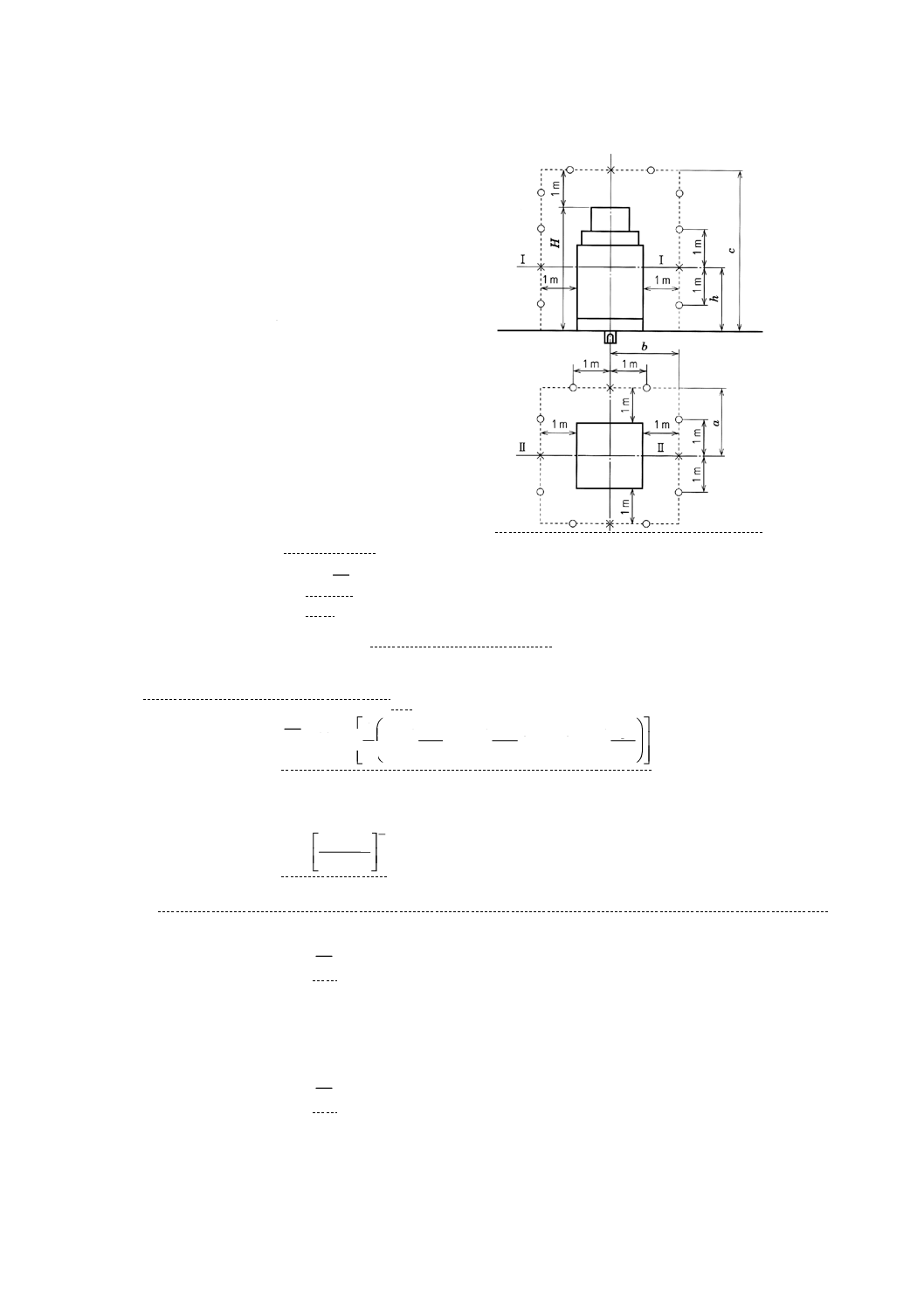
1.2)
立軸機の測定 図6の基準測定点(×印)及び基準測定点から1mピッチの各点(○印)で騒音レ
ベル (dB) を測定する。
図6a)による測定位置は,軸中心線を含む垂直面上の位置を示し,また,図6b)による測定位置は,
電動機高さの半分の位置における水平面上の位置を示す。
28
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) b)図のII−II線に沿う縦断面
b) a)図のI−I線に沿う横断面
H:電動機高さ
2
H
h=
(ただし,h≦0.25mのときは,h= 0.25mとする。)
a≧b
図6 測定位置(立軸機)
2) 騒音の音響パワーレベルの算出方法 n個の騒音の音圧レベル測定値Lp1,Lp2, ……,Lpnから,次
の式を用いて騒音の平均音圧レベル
p
Lを求める。
+
…
…
+
+
=
−
−
−
10
log
10
log
10
log
1
log
10
pn
1
P2
1
P1
1
P
L
L
L
n
L
次に図5又は図6にあるa,b及びcの値から等価半球の半径rsを,次の式で求める。
2
1
S
2
)
( +
=
c
b
a
r
電動機が反射性の床面,例えば,コンクリート床や地面上などに置かれているときは,次の式に
よって,A特性で補正された音響パワーレベルLwを求める。
Lw=
P
L+20 logrs+8 (dB)
また,電動機が自由空間(音場が反射物などの影響を受けない場所のことであって,無響室がこ
れに相当する。)で測定された場合は,次の式によってA特性で補正された音響パワーレベルLwを
求める。
Lw=
P
L+20 logrs+11 (dB)
備考 騒音計及び測定上の精度のため,騒音レベル測定には,3dB以内の誤差を生じることがある。
29
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.10 耐電圧試験 耐電圧試験は,直流500V絶縁抵抗計で電動機巻線の絶縁抵抗を測定し,1MΩ以上あ
ることを確かめた後,周波数50Hz又は60Hzの正弦波に近い表14の試験電圧を,その一次巻線と鉄心及
び大地との間に1分間加える。温度試験を実施した場合は,温度試験の直後にこの試験を行う。ただし,
多量生産の電動機には,表14の試験電圧の120%の電圧を1秒間加えてこれに代えることができる。
表14 試験電圧
電動機定格出力
試験電圧(実効値)
1kW未満
2E+500 (V)
(最低1 000V)
1kW以上
2E+1 000 (V)
(最低1 500V)
備考 Eは,定格電圧。
8. 表示 電動機には,読みやすく,耐久性があり,次の事項を記載した定格銘板を取り付けなければな
らない。
なお,次の事項は必ずしも同一銘板上になくてもよい。
銘板は,できるだけ電動機の見やすい箇所に取り付ける。
a) 電動機の名称
b) 製造業者名又はその略号
c) 製造番号又は機器番号
d) 製造年[この情報が項目c)によって製造業者から得られる場合は省略してもよい。]
e) 形式(製造業者が定めた形式名)
f)
保護方式の記号
g) 定格出力
h) 定格電圧
i)
定格電流(全負荷電流の近似値を表示する。)
j)
定格回転速度(定格出力における毎分回転数の近似値を表示する。)
k) 相数及び定格周波数
l)
定格の種類又は使用の種類(省略する場合は,連続定格とする。)
m) 耐熱クラス又は温度上昇限度
n) 構造上回転方向が制約される場合には,回転方向を電動機の見やすい箇所に表示する。
o) 適用規格の番号
関連規格 JIS C 4003 : 1998 電気絶縁の耐熱クラス及び耐熱性評価
JIS C 4034-1 : 1999 回転電気機械−第1部:定格及び特性
JEC-2137 : 2000 誘導機
JEM 1400 : 1991 一般用低圧三相かご形誘導電動機の寸法

3
0
C
4
2
1
0
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書(参考) JISと国際規格との対比表
序文 この附属書(参考)は,JISと対応する国際規格との対比について記述するもので,規定の一部ではない。
JIS C 4210 : 2001 一般用低圧三相かご形誘導電動機 IEC 60034-1 : 1996 Rotating electrical machines−Part 1 : Rating and performance
(回転電気機械−第1部:定格及び特性)
IEC 60034-2 : 1972 Rotating electrical machines−Part 2 : Methods for determining losses and efficiency of rotating electrical
machinery from tests
(回転電気機械−第2部:試験による回転機の損失及び効率算定)
IEC 60034-9 : 1997 Rotating electrical machines−Part 9 : Noise limits
(回転電気機械−第9部:騒音の限度)
IEC 60034-12 : 1972 Rotating electrical machines−Part 12 : Starting performance of single-speed three-phase cage induction
motors for voltage up to and including 660 V
(回転電気機械−第12部:電圧660V以下の単速度三相かご形誘導電動機の始動特性)
IEC 60072-1 : 1991 Dimensions and output series for rotating electrical machines−Part 1 : Frame numbers 56 to 400 and
flange numbers 55 to 1080
(回転機の寸法及び出力系列−第1部:フレーム番号56−400及びフランジ番号55-1080)
(I) JISの規定
(II) 国際規格
番号
(III) 国際規格の規定
(IV) JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所:本文中
表示方法:点線の下線
(V) JISと国際規格との技術的差
異の理由及び今後の対策
項目
番号
内容
項目番
号
内容
項目ごとの
評価
技術的差異の内容
1.
適用範囲として,冷媒温度40℃
以下の場所に使用される連続
定格,周波数50Hz,若しくは
60Hz専用又は50Hz,60Hz共
用,電圧600V以下,保護方式
はIP2X(保護計),IP4X(全閉
形)の一般用低圧三相かご形誘
導電動機と規定している。
IEC 60034-1
1.1
車両用回転機を除くすべての
回転機。
MOD/変更 JISは,IECの適用範囲の
一部を適用範囲としてる。
1. IEC 60034シリーズ(回転機規格
シリーズ)の規格体系は,要素技
術ごとに規定する形態で,機種ご
とに規定する形態をとっていな
い。それに対してJISは機種ごと
に規定する形態をとっている。
2. JIS規定は標準化を念頭において
(1)出力と寸法の対応,(2)効率
値・力率値などを規定している。
3
1
C
4
2
1
0
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I) JISの規定
(II) 国際規格
番号
(III) 国際規格の規定
(IV) JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所:本文中
表示方法:点線の下線
(V) JISと国際規格との技術的差
異の理由及び今後の対策
項目
番号
内容
項目番
号
内容
項目ごとの
評価
技術的差異の内容
2.
引用規格としてJIS規格9件と
国際規格1件を規定している。
IEC 60034-1
1.2
引用規格として国際規格23件
を規定している。
MOD/変更 引用規格が異なる。
JISは,この機種範囲に必要な規格
だけを引用規格としている。
3.1
定格電圧は200,220,400,440V
と規定している。
IEC 60034-1
6.1
100V-750 000V
MOD/変更 JISは,IECの定格電圧の
一部を定格電圧としてい
る。
JISは,この機種範囲に標準的に使
用されている電圧を定格電圧とし
て規定している。
3.2
定格出力として0.2,0.25,0.37,
0.4, 0.55,0.75,1.1,1.5,2.2,
3.7,5.5,7.5,11,15,18.5,
22,30,37kWを規定している。
IEC 60072-1
9.
推奨する定格出力として
0.06-250kWを規定
MOD/変更 JISは,IECの定格出力以
外に0.2,0.4kWを定格出
力としている。
0.2,0.4kWは従来のJISに規定さ
れ,長年にわたり標準出力として使
われている。
4.1
E,B,Fクラスの温度上昇限度
を規定している。
IEC 60034-1
7.10
A,E,B,F,Hクラスの温度
上昇限度を規定している。
MOD/変更 IECではA,Hも規定され
ている。
JISは,この機種範囲に標準的に使
用されている耐熱クラスだけを規
定している。
IEC 60034-1
7.2
冷却方式別に温度上昇限度を
規定している。
MOD/変更 JISは,空冷機種の温度上
昇のみを規定している。
JISは,この機種範囲に標準的に使
用されている冷却方式の温度上昇
限度だけを規定している。
4.2
定格200Vの電動機の全負荷特
性(効率,力率)を,また,参
考値として無負荷電流,全負荷
電流,全負荷滑りを規定してい
る。
−
−
IEC規格では特に規定してい
ない。
MOD/追加
−
ユーザのため基準となる特性数値
が必要である。
4.3
0.2〜37kW,2,4,6極の最小
始動トルク,プルアップトル
ク,最大トルクについて定格ト
ルクに対する比で規定してい
る。
IEC 60034-12
4.8
0.4〜630kW-2,4,6,8極に対
して4種類の設計ごとに始動ト
ルク,プルアップトルク,最大
トルクを規定している。
MOD/変更 IECではトルク特性を4種
類の設計に分類している。
JISはそのうちのDesign N
のトルクを規定している。
JISは一般用低圧三相誘導電動機の
規格であるため,Design Nだけを規
定している。
4.4
定格出力kWに対する始動入力
kVAの比が規定されている。
IEC 60034-12
5.9
拘束皮相電力S1=kVA/kWが
規定されている。
MOD/変更 規定出力範囲で0.2kWは
JISにはあるがIECにはな
い。
JISは0.2kWも適用範囲としている
ため,規定している。
3
2
C
4
2
1
0
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I) JISの規定
(II) 国際規格
番号
(III) 国際規格の規定
(IV) JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所:本文中
表示方法:点線の下線
(V) JISと国際規格との技術的差
異の理由及び今後の対策
項目
番号
内容
項目番
号
内容
項目ごとの
評価
技術的差異の内容
4.5
0.2kW〜37kW,2,4,6極の各
定格に対して騒音レベルを音
響パワーレベル及び音圧レベ
ルで規定している。
IEC 60034-9
6.
1kW〜5 500kW,3 750min−1以
下について騒音レベルを音響
パワーレベルで規定している。
MOD/変更 規定している定格の範囲
が異なる。また,JISでは
音圧レベルでも規定して
いる。
国内では音圧レベルの規定が一般
的であるので音圧レベルでも規定
している。
なお,音響パワーレベルはIECの
は規定と整合している。
4.6
耐電圧を規定している。
IEC 60034-1
8.1
耐電圧を規定している。
IDT
−
−
4.7
運転中の電圧及び周波数変動
を規定している。
IEC 60034-1
6.3
運転中の電圧及び周波数変動
を規定している。
IDT
−
−
5.1
付属品としてベースについて
規定している。
−
−
IEC規格では特に規定してい
ない。
MOD/変更
−
国内では,ユーザの要求により規定
する必要がある。
5.2
ケーブル引込口方向及び端子
箱を設ける場合の位置につい
て規定している。
IEC 60072-1
4.
端子箱の取付位置を規定して
いる。
MOD/変更 ケーブル引込口方向及び
端子箱位置が異なる。
JISに長年にわたり規定されてお
り,変更することはユーザに対し不
利益となる。
5.3
スターデルタ始動について規
定している。
−
−
IEC規格では特に規定してい
ない。
MOD/追加
−
国内では,ユーザの要求により規定
する必要がある。
5.4
接地端子について規定してい
る。
IEC 60034-1
10.1
接地端子について規定してい
る。
MOD/変更 IECは接地導線の断面積を
規定している。
JISは国内の慣行に従った規定とし
ている。
6.
出力と枠番号の対応について
規定している。
IEC 60072-1
6.1,
10
枠番号と寸法について規定し
ている。
MOD/追加 IECでは出力と枠番号の対
応について規定していな
い。
国内では,ユーザの要求によって規
定する必要がある。
7.1
試験の種類について規定して
いる。
−
−
IEC規格では特に規定してい
ない。
MOD/追加
−
試験法を規定する必要がある。
7.2
構造試験について規定してい
る。
−
−
IEC規格では特に規定してい
ない。
MOD/追加
−
試験法を規定する必要がある。
7.3
抵抗測定について規定してい
る。
−
−
IEC規格では特に規定してい
ない。
MOD/追加
−
試験法を規定する必要がある。
7.4
拘束試験について規定してい
る。
−
−
IEC規格では特に規定してい
ない。
MOD/追加
−
試験法を規定する必要がある。
3
3
C
4
2
1
0
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I) JISの規定
(II) 国際規格
番号
(III) 国際規格の規定
(IV) JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所:本文中
表示方法:点線の下線
(V) JISと国際規格との技術的差
異の理由及び今後の対策
項目
番号
内容
項目番
号
内容
項目ごとの
評価
技術的差異の内容
7.5
無負荷試験について規定して
いり。
IEC 60034-2
9.1.1.1 無負荷試験について規定して
いる。
IDT
−
−
7.6
定格出力で連続負荷して行う。
実負荷が困難な場合は等価負
荷法による。
IEC 60034-1
7.7
負荷の種類を10通りで規定
(S1〜S10)
MOD/変更 JISはS1の連続運転のみの
試験を規定している。
JISでは,購入者が使用形式を明示
できない場合を想定しているため,
S1だけとした(IEC準拠)。
固定子巻線の温度上昇は抵抗
法による。それ以外は温度計法
による。
IEC 60034-1
7.6
抵抗法,埋込温度計 (ETD) 法,
温度計法による。
MOD/変更 JISでは埋込温度計 (ETD)
法がない。
JISは一般用低圧三相誘導電動機の
規格のため抵抗法だけを規定して
いる。この範囲の機種に対しては
IECも抵抗法だけを規定している。
冷媒温度は1時間以下の等間隔
で測定した記録から,最後の
1/4の期間における平均値とす
る。
IEC 60034-1
7.3.3
試験期間の最後の1/4の期間に
おける平均値とする。
MOD/変更 間隔が1時間以下とJISで
は規定しているが,IECに
はない。
試験を正確にするため,規定する必
要がある。
7.7
負荷特性,最大トルク,最小始
動トルク,プルアップトルクの
算定法,試験法を規定してい
る。
IEC 60034-2
9.
IEC規格では効率算定のみ規
定している。
MOD/追加 IECではトルク特性試験に
ついて規定していない。
JISには負荷特性値・トルク特性値
の規定があり試験法を規定する必
要がある。
7.8
始動入力特性試験について規
定している。
−
−
IEC規格では特に規定してい
ない。
MOD/追加
−
始動入力特性の規定があり,試験法
を規定する必要がある。
7.9
0.2kW〜37kW,2,4,6極に対
して音響パワーレベル及び音
圧レベルの騒音試験法を規定
している。
IEC 60034-9
4.
1kW以上に対して音響パワー
レベルの騒音試験法を規定し
ている。
MOD/変更 JISは音圧レベルの試験法
も規定している。
音圧レベルの規定があるため,試験
法も規定する。く
7.10
耐電圧試験について規定して
いる。
IEC 60034-1
8.1
耐電圧試験について規定して
いる。
MOD/変更 JISは0.2kW〜37kWにつ
いての規格であり,大容量
機についての規定は削除
している。
JISには大容量機の規定は不要であ
る。
3
4
C
4
2
1
0
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I) JISの規定
(II) 国際規格
番号
(III) 国際規格の規定
(IV) JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所:本文中
表示方法:点線の下線
(V) JISと国際規格との技術的差
異の理由及び今後の対策
項目
番号
内容
項目番
号
内容
項目ごとの
評価
技術的差異の内容
8.
製造業者名などの一般事項と
誘導電動機に固有な事項を銘
板に表示することを規定して
いる。
IEC 60034-1
9.
一般事項及び全機種にわたる
事項の表示を規定している。
MOD/変更 JISは,IECの表示事項の
うち,誘導電動機に必要な
事項だけを表示事項に規
定している。
誘導電動機以外の表示事項は不要
である。
JISと国際規格との対応の程度の全体評価 : MOD
備考1. 項目ごとの評価欄の記号の意味は,次のとおりである。
− IDT ················ 技術的差異がない。
− MOD/追加 ····· 国際規格にない規定項目又は規定内容を追加している。
− MOD/変更 ····· 国際規格の規定内容を変更している。
2. JISと国際規格との対応の程度の全体評価欄の記号の意味は,次のとおりである。
− MOD ·············· 国際規格を修正している。
35
C 4210 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
改正原案作成委員会 構成表
回転機標準化委員会(社団法人電気学会) 構成表
氏名
所属
(委員長)
猪 狩 武 尚
中央大学
(委員)
三 木 一 郎
明治大学
森 安 正 司
関東学院大学
坪 井 和 男
中部大学
粥 川 滋 広
株式会社日立製作所
松 枝 泰 生
三菱電機株式会社
村 岡 政 義
富士電機株式会社
山 田 生 実
株式会社安川電機
中 原 茂 樹
社団法人日本電機工業会
小 関 正 剛
東京電力株式会社
美 濃 由 明
関西電力株式会社
松 岡 孝 一
財団法人鉄道総合技術研究所
上之薗 博
財団法人電力中央研究所
沢 孝一郎
慶鷹義塾大学
山 村 昌
日本学士院会員
磯 辺 昭 二
国学院大学専門学校
(幹事)
炭 谷 英 夫
株式会社東芝
誘導機技術専門委員会(社団法人日本電機工業会) 構成表
氏名
所属
(委員長)
篠 崎 信 行
富士電機株式会社
(副委員長)
川 本 正 志
株式会社東芝
(委員)
小 暮 和 広
株式会社栗田電機製作所
関 口 孝
山洋電気株式会社
奥 山 雅 美
株式会社下村電友舎製作所
村 田 俊 克
神鋼電機株式会社
水 谷 清 信
住友重機械株式会社
水 口 真 治
東洋電機製造株式会社
出 口 保 夫
デンセイ・ラムダ株式会社
妹 尾 正 治
株式会社日立製作所
半 田 栄 一
富士電機株式会社
和 田 幸 利
松下電器産業株式会社
中 本 道 夫
三菱電機株式会社
長 澤 清
株式会社明電舎
木 崎 雄 一
株式会社安川電機
(幹事)
中 原 茂 樹
社団法人日本電機工業会