C 1912:2014 (IEC 62233:2005)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 2
3.1 物理量及び単位 ············································································································· 2
3.2 用語及び定義 ················································································································ 2
4 試験方法及び限度値の選択 ································································································· 4
5 測定方法························································································································· 4
5.1 電界 ···························································································································· 4
5.2 周波数範囲 ··················································································································· 4
5.3 測定距離,センサの位置及び動作条件················································································ 4
5.4 磁界センサ ··················································································································· 4
5.5 磁界の測定手順 ············································································································· 4
5.6 測定の不確かさ ············································································································· 8
5.7 試験報告書 ··················································································································· 9
6 結果の評価 ······················································································································ 9
附属書A(規定)磁束密度測定のための条件 ············································································ 14
附属書B(参考)ばく露限度値 ······························································································ 21
附属書C(規定)結合係数の決定 ··························································································· 23
附属書D(参考)附属書Bの限度値による計算例 ······································································ 28
参考文献 ···························································································································· 36
C 1912:2014 (IEC 62233:2005)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人電気学会(IEEJ)から,工業標
準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業
大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格に従うことは,次の者の有する特許権等の使用に該当するおそれがあるので,留意する。
− 氏名:ナルダ セイフティ テスト ソリューションズ ゲーエムベーハー
Narda Safety Test Solutions GmbH
− 住所:ドイツ連邦共和国,72793 プフリンゲン,ザントハウゼンシュトラーセ 7
Sandhausenstraße 7, 72793 Pfullingen, Germany
− 特許番号:P3487824(日本),100 00 706(ドイツ連邦共和国),1327593(イタリア)
上記の,特許権等の権利者は,非差別的かつ合理的な条件でいかなる者に対しても当該特許権等の実施
の許諾等をする意思のあることを表明している。ただし,この規格に関連する他の特許権等の権利者に対
しては,同様の条件でその実施が許諾されることを条件としている。
この規格に従うことが,必ずしも,特許権の無償公開を意味するものではないことに注意する必要があ
る。
この規格の一部が,上記に示す以外の特許権等に抵触する可能性がある。経済産業大臣及び日本工業標
準調査会は,このような特許権等に関わる確認について,責任はもたない。
なお,ここで“特許権等”とは,特許権,出願公開後の特許出願又は実用新案権をいう。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 1912:2014
(IEC 62233:2005)
家庭用電気機器及び類似機器からの人体ばく露に
関する電磁界の測定方法
Measurement methods for electromagnetic fields of household appliances
and similar apparatus with regard to human exposure
序文
この規格は,2005年に第1版として発行されたIEC 62233を基に,技術的内容を変更することなく作成
した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,300 GHz以下の電磁界を取り扱い,家庭用及び類似用途の電気機器周囲の電界の強さ及び
磁束密度を評価するための方法について,試験条件並びに測定距離及び測定位置を含めて規定する。
電気機器は,モータ,発熱体,又はこれらの組合せによって構成される場合もあり,電気回路又は電子
回路を含む場合もある。電気機器への電力供給には,商用電源,バッテリ,又はこれら以外の電源を用い
る場合がある。
電気機器には,家庭用電気機器,電動工具及び電動玩具のような機器を含む。
通常の家庭用として意図されたものでない場合も,一般の人が近付くことがある機器,又は専門家でな
い人が用いることがある機器は,この規格の適用範囲に含む。この規格は,次の機器には適用しない。
・ 重工業向け専用に設計した機器
・ 建物の固定電気設備の一部として意図した機器(ヒューズ,遮断器,ケーブル,スイッチなど)
・ ラジオ受信機,テレビ受信機,オーディオ機器,ビデオ機器及び電子楽器
・ 医用電気機器
・ パーソナルコンピュータ及び類似機器
・ 無線設備
・ 車両専用に設計した機器
この規格及び/又はほかの規格の箇条で,同時に対象とする多機能機器からの電磁界評価は,動作状態
の関連機能に関するそれぞれの箇条又は規格の規定を用いて行う。
機器の通常使用状態でない動作については,考慮しない。
この規格には,人体ばく露の評価を行うために必要な次の規定要素を含む。
・ センサ
・ 測定方法
・ 試験対象の機器の動作条件
・ 測定距離及び位置
2
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
測定方法は,10 Hz〜400 kHzの周波数範囲で規定する。400 kHzを超える及び10 Hz未満の周波数範囲
では,JIS C 9335規格群に特に規定がない限り,この規格の適用範囲の機器は,試験を行うことなくこの
規格を満足するものとみなす。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62233:2005,Measurement methods for electromagnetic fields of household appliances and similar
apparatus with regard to human exposure(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS C 1910 人体ばく露を考慮した低周波磁界及び電界の測定−測定器の特別要求事項及び測定の手
引き
注記 対応国際規格:IEC 61786,Measurement of low-frequency magnetic and electric fields with regard
to exposure of human beings−Special requirements for instruments and guidance for measurements
(IDT)
JIS C 9335(規格群) 家庭用及びこれに類する電気機器の安全性
注記 対応国際規格:IEC 60335 (all parts),Household and similar electrical appliances−Safety(MOD)
IEC 62311,Assessment of electronic and electrical equipment related to human exposure restrictions for
electromagnetic fields (0 Hz−300 GHz)
CISPR 14-1,Electromagnetic compatibility−Requirements for household appliances, electric tools and similar
apparatus−Part 1: Emission
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
物理量及び単位
物理量
記号
単位
単位記号
導電率
σ
シーメンス毎メートル
S/m
電流密度
J
アンペア毎平方メートル
A/m2
電界の強さ
E
ボルト毎メートル
V/m
周波数
f
ヘルツ
Hz
磁界の強さ
H
アンペア毎メートル
A/m
磁束密度
B
テスラ
T(Wb/m2又はV・s/m2)
3.2
用語及び定義
3.2.1
基本制限(基本限界)[basic restriction(basic limitations)]
確立された生物学的影響を根拠として,時間的に変化する電界,磁界及び電磁界への人体ばく露の一定
の安全係数を含む制限。人体内の電流密度に対する基本制限はJBR,人体に誘起される電界の強さに対す
る基本制限はEBRとする。
3
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.2
結合係数,ac(r1)(coupling factor)
機器の周囲の電磁界の不均一性,センサの測定面積,及び測定距離r1(3.2.6参照)における機器の使用
者の胴体又は頭部の寸法を考慮した係数。
3.2.3
フーリエ変換(Fourier transformation)
時間関数から周波数関数を導き出す数学的処理手順。
3.2.4
高速フーリエ変換,FFT(fast Fourier transformation)
高速に計算することに特化したフーリエ変換。
3.2.5
ホットスポット(hot spot)
電磁界分布が不均一なために生じる,電磁界強度が局所的に最大となる場所。
3.2.6
測定距離,r1(measuring distance)
機器の表面からセンサ表面の最も近い点までの最短距離(附属書A参照)。
3.2.7
測定位置(measuring positions)
3.2.7.1
周囲(around)
人が近付くことが予想される機器表面から一定の距離をおいた測定位置。測定するときは,機器の周囲
全体に沿ってセンサを移動させる。
注記 図A.2を参照。
3.2.7.2
上面(top)
機器の上面から規定する一定の距離をおいた測定位置。測定するときは,センサを移動させる。
注記 図A.1を参照。
3.2.7.3
正面(front)
機器の正面から規定する距離をおいた測定位置。測定するときは,センサを移動させる。
注記 図A.1を参照。
3.2.8
参考レベル(reference level),最大許容ばく露レベル(maximum permissible exposure level),BRL
最悪のばく露条件(例 均一電磁界へのばく露)を仮定して,基本制限から導き出す磁界レベル。
注記 参考レベルを超える場合でも,基本制限を超えないときがある。
3.2.9
応答時間(response time)
測定器が,測定する電磁界に置かれてから測定値の最終値に対して,規定の比率に達するまでの時間。
3.2.10
重み付け結果,W(weighted result)
周波数に依存する参考レベルを織り込んだ測定の最終結果。
4
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4
試験方法及び限度値の選択
適切な限度値を選択する。
5.5.2の手順は,発生した電磁界のスペクトルに関係なく,全ての機器に適用できる。この手順は,標準
となる方法であり,疑義がある場合は,この方法を採用する。
電磁界の特定の状況(人体の位置又は測定配置)において,参考レベルを超える場合は,基本制限への
適合判定を行う。
一つの基本周波数成分及びその高調波成分によって構成される線状スペクトルを発生する機器には,
5.5.3の手順を適用してもよい。
機器から発生する電磁界の大部分が電源周波数及びその高調波に限る場合,その機器には,5.5.4の代替
試験方法の中のいずれかを適用してもよい。
動作サイクル全体が1秒未満の機器は,IEC 62311に規定するパルス電磁界に対する測定方法に従って
測定するが,動作条件,測定距離及び結合係数は,この規格で規定する。
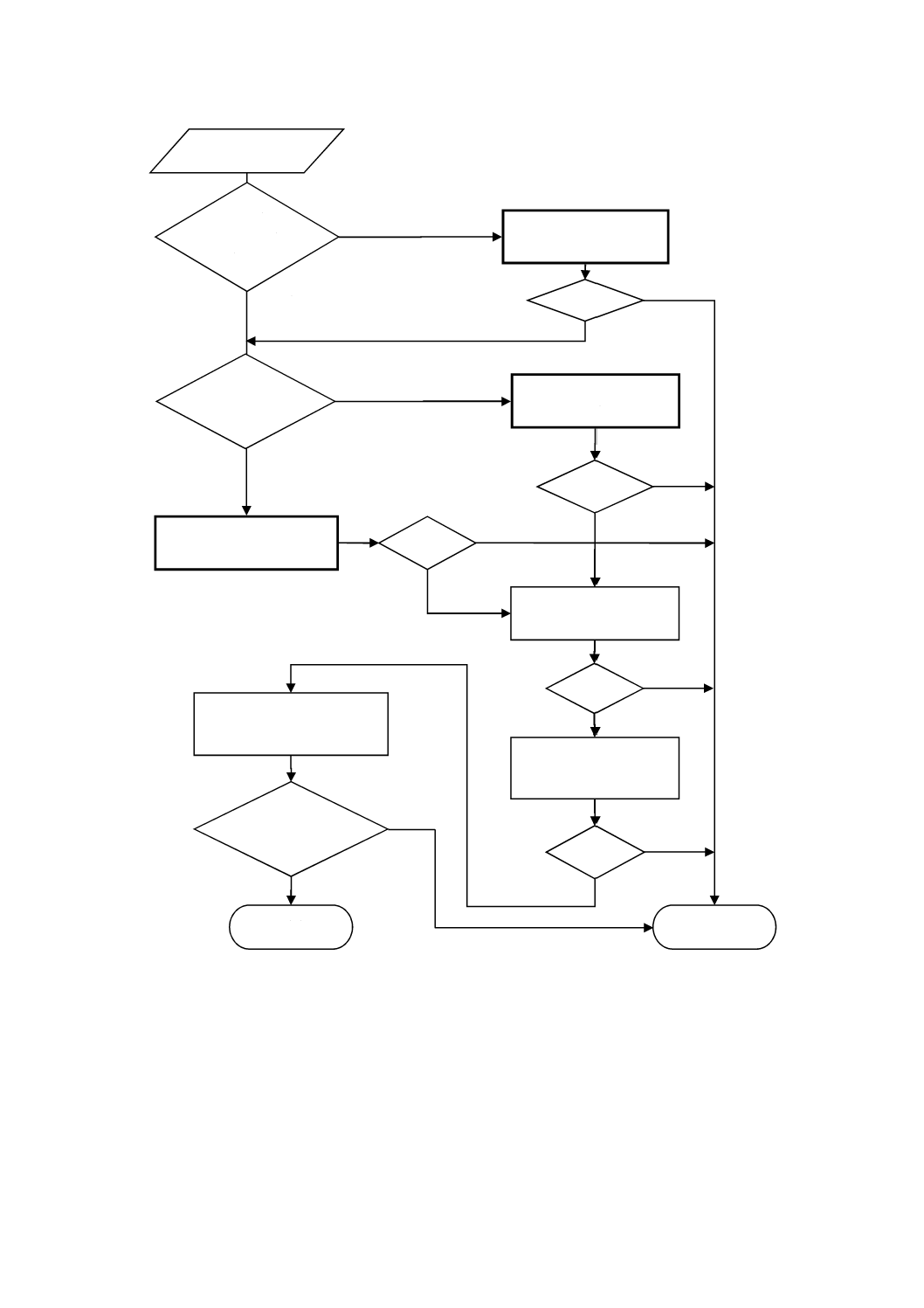
最も簡単な方法からより複雑な方法へと,段階的な手順を適用してもよい(図1参照)。
5
測定方法
5.1
電界
電界の測定方法は,検討中である。
変圧器又は電子回路をもつ機器が1 000 V未満の電圧で動作している場合,その機器は,試験なしで適
合とみなす。
5.2
周波数範囲
対象とする周波数範囲は,10 Hz〜400 kHzとする(箇条1参照)。
1回の測定でこの周波数範囲を網羅できない場合は,各測定周波数範囲での重み付け結果を加える。
5.3
測定距離,センサの位置及び動作条件
測定距離,センサの位置及び動作条件は,附属書Aによる。
測定時の動作条件,測定位置及び測定距離は,試験報告書に記載する。
5.4
磁界センサ
測定面積は,各方向ごとに100 cm2とし,この面積全体で平均化した磁束密度を測定値とする。標準セ
ンサの構成は,等方向性感度を得るために,相互に直交する軸をもち,測定面積が100 cm2±5 cm2で,三
つのコイルからなる。標準センサの外径は,13 cmを超えてはならない。
結合係数を決定する場合,附属書Cに規定する測定面積が,3 cm2±0.3 cm2の等方向性センサを用いる。
適切な加算法と組み合わせて,単一方向センサ(等方向性ではない。)を用いてもよい。
注記 磁束密度の最終値は,各方向ごとに測定した値のベクトル和である。これによって,測定値は,
磁界ベクトルの方向に依存しなくなる。
5.5
磁界の測定手順
5.5.1
一般
測定信号は,周波数との関係で評価する。独立した複数の磁界源を考慮して,一番大きい測定値を採用
する。
継続時間が200 ms未満の過渡磁界(例 スイッチの開閉のとき)は,無視する。
測定中に開閉動作が発生した場合には,再測定を行う。
測定器の内部雑音は,限度値の5 %以下とする。内部雑音の最大レベルより低い測定値の場合は,無視
5
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する。
背景雑音は,限度値の5 %以下とする。
測定器の応答時間(最終値の90 %に達するまでの時間)は,1秒を超えてはならない。
磁束密度は,1秒間の平均とする。
磁界源からの10 Hz〜400 kHzの信号が,1秒を超えて一定であることが分かっている場合は,1秒未満
のサンプリング時間を用いてもよい。
適合判定のために行う最終測定の場合には,センサを固定しておくことが望ましい。
5.5.2
時間領域評価
磁束密度の時間領域測定は,信号の種類に関係なく行うことができる。複数の周波数構成要素をもつ磁
界の場合,周波数の関数である参考レベルの逆数となる伝達関数Aを実行することによって,参考レベル
の周波数依存が織り込まれる。
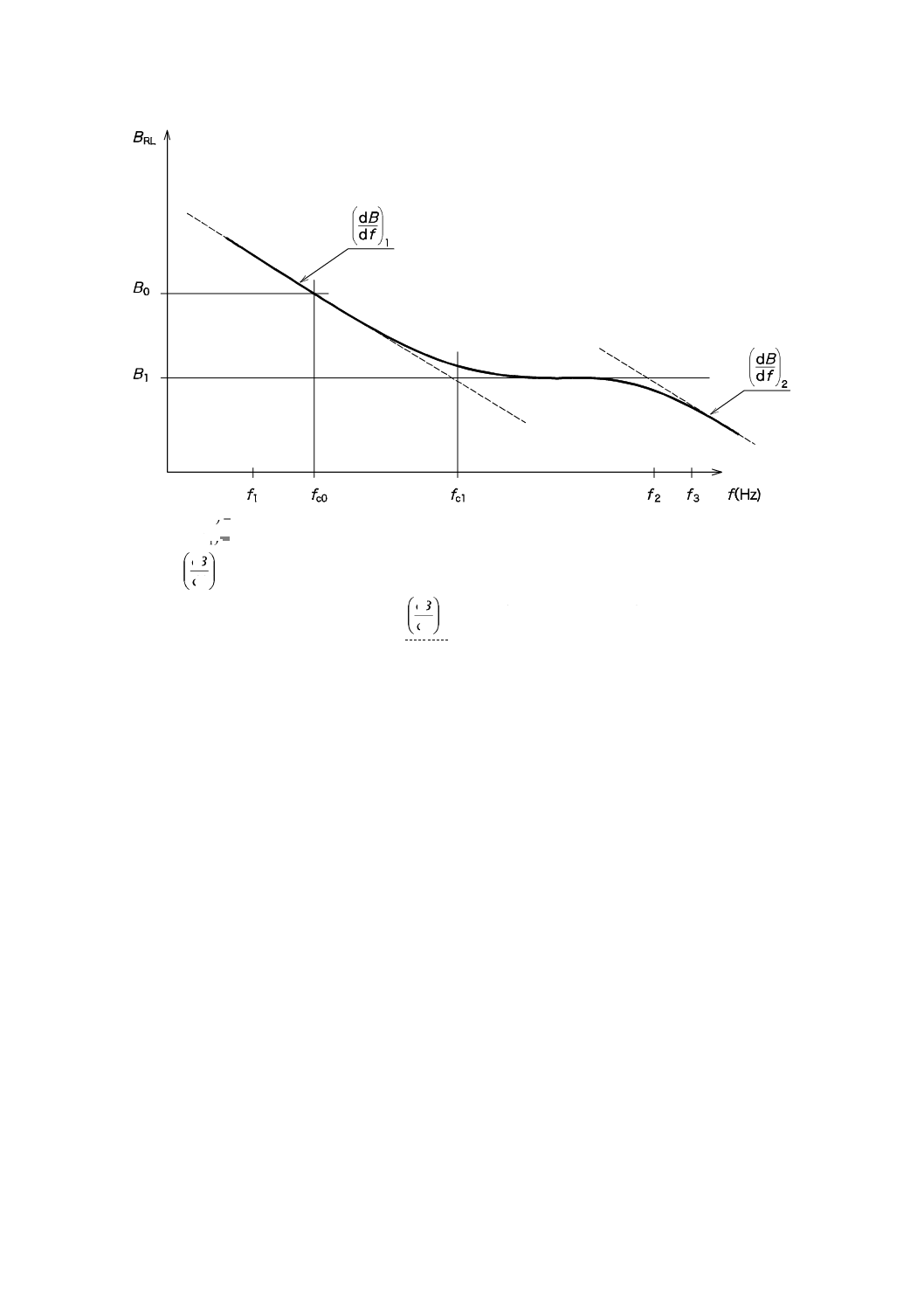
参考レベルの周波数依存の例を,図2に示す。
伝達関数Aは,参考レベルBRLをB0で正規化した関数の逆数であり,B0は,基準周波数fc0でのBRLで
ある。
注記1 正規化には,電源周波数を用いることが望ましい(例 fc0=50 Hz又は60 Hz)。
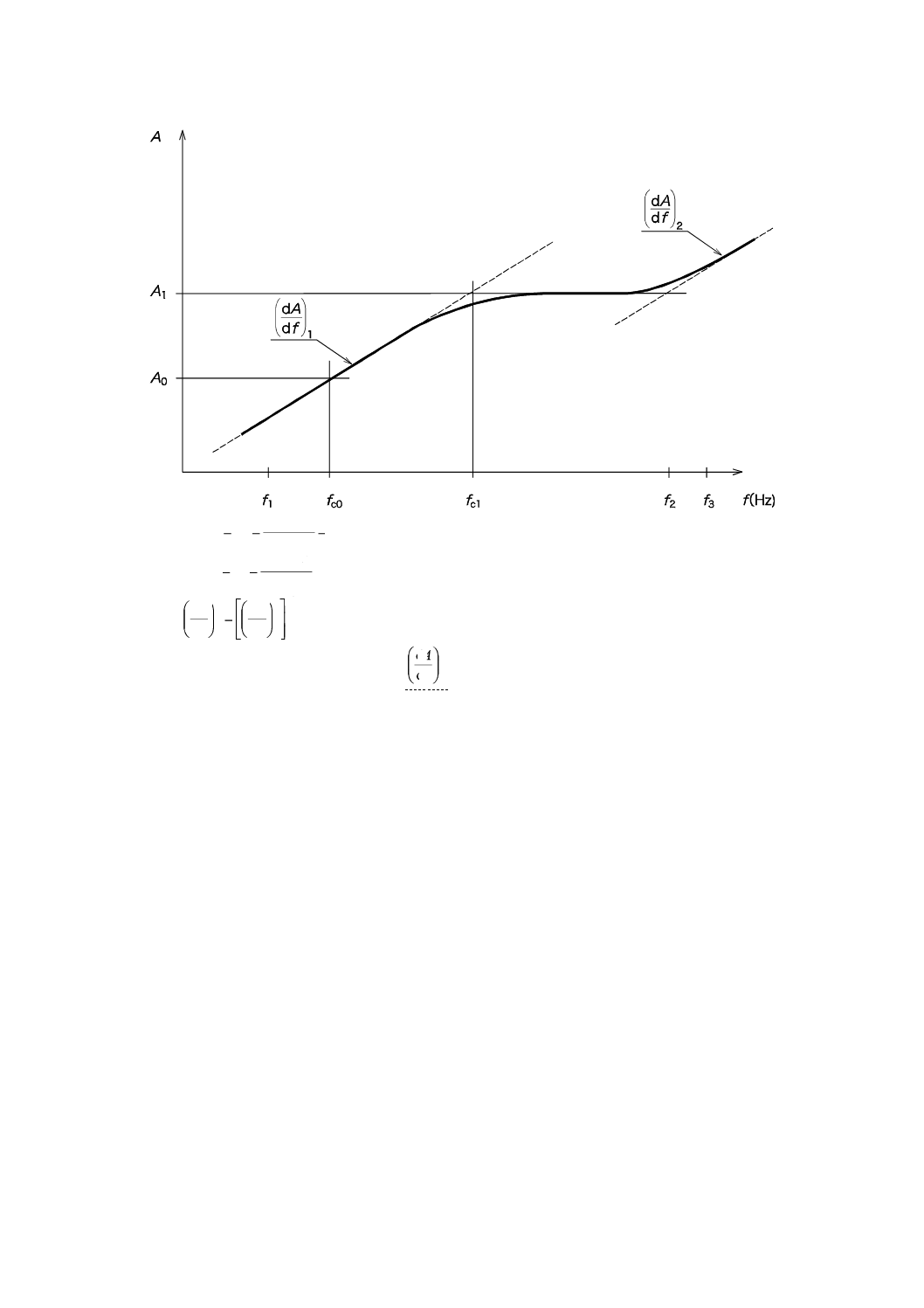
一次フィルタを用いることによって,伝達関数Aとすることができる。伝達関数の特性例を,図3に示
す。
伝達関数を表す一般式を,式(1)に示す。
)
(
)
(
)
(
RL
0
c
RL
f
B
f
B
f
A
=
········································································ (1)
ここに,
A(f): 周波数fを変数とした伝達関数
BRL(fc0): 基準周波数fc0での磁束密度の参考レベル
BRL(f): 周波数fでの磁束密度の参考レベル
伝達関数の始点は,f1=10 Hzとする。伝達関数の終点は,fn=400 kHzとする。
注記2 伝達関数の数値例については,表D.1及び表D.2を参照。
測定及び結果の処理は,次によって行う。
・ 各コイル信号を個別に測定する。
・ 伝達関数を用いて各信号に重み付けを行う。
・ 重み付け信号を二乗する。
・ 二乗した信号を加算する。
・ 和を平均する。
・ 平均の平方根を得る。
この結果は,磁束密度の重み付け実効値となる。
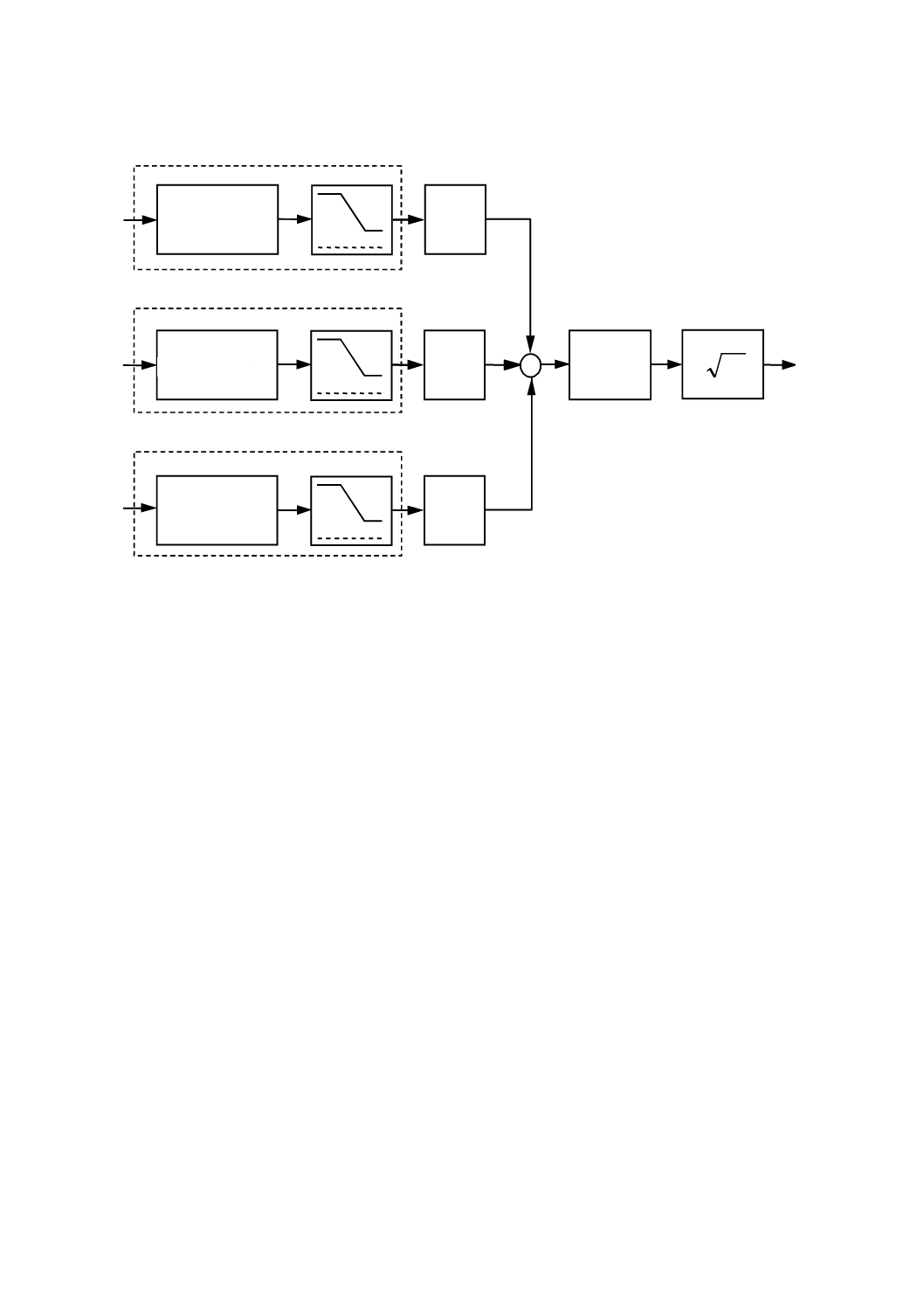
この手順の概念を,図4に示す。
注記3 伝達関数A(図4の破線部分)は,磁束密度B(t)に対して時間微分を行うセンサコイル,
及び“遅れ又は進み素子”を用いたローパスフィルタである。ローパスフィルタは,“遅れ又
は進み素子”によって決まるコーナ周波数(遮断周波数)より低い周波数帯域では,信号を
通過させ,高い周波数帯域では,周波数に比例して信号を減衰させる(参考文献[24]参照)。
また,高い周波数帯域では,信号に対して時間積分する特性によって,出力を得る。この出
力は,図3に示す伝達関数Aを用いた評価となる。コーナ周波数(遮断周波数)は,図3の
6
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
伝達関数に示すfc1である。
注記4 時間領域信号に用いる伝達関数のこれ以外の方法として,電子回路によるアナログフィルタ,
あらかじめプログラムされたデジタルシグナルプロセッサ,信号アナライザ,表計算ソフト
ウェア,専用のプログラムを用いたコンピュータによる計算などがある。
注記5 50 Hz又は60 Hzの電源周波数を用い,その高調波及びそれらの周波数範囲全体で,実質的
に周波数に依存しない磁界強度を限度値とする多くの機器に関しては,伝達関数なしでこの
方法が使用できる。この方法は,例えば,20 Hz〜759 Hzの周波数範囲で,磁束密度に関し
て,最大許容ばく露値(maximum permissible exposure,MPE)が一定であるIEEE C95.6:2002
[12]の安全規格に対して使用できる。この場合,当該周波数範囲での実効値の測定だけを行
い,その測定結果を,直接,限度値(例 MPE)と比較できる。
この測定結果は,基準周波数fc0での参考レベルBRLと,直接,比較する。局所的な磁界を発生する機器
では,附属書Cに規定する結合係数ac(r1)を織り込んで比較する。最終の重み付け結果Wn及び結合係数を
織り込んだ重み付け結果Wncは,式(2)及び式(3)によって求めることができる。
RL
rms
n
B
B
W=
················································································ (2)
n
1
c
nc
)
(
W
r
a
W
×
=
········································································· (3)
ここに,
Wn: 1回の測定での重み付け結果
Brms: 磁束密度の重み付け実効値
BRL: fc0での磁束密度の参考レベル
Wnc: 不均一な磁界の結合を考慮してac(r1)を織り込んだ1回の測
定での重み付け結果
ac(r1): 附属書C又は表D.3による結合係数
重み付け結果Wn及びWncは,値1を超えてはならない。
5.5.3
線状スペクトル評価
この方法は,線状スペクトルしかない(例 50 Hz又は60Hzの基本周波数と幾つかの高調波とで構成さ
れる。)場合に適用できる(箇条4参照)。
該当する各周波数で磁束密度を測定する。これは,磁束密度の時間信号を記録し,スペクトル構成要素
にフーリエ変換を行うことによって測定できる。
測定は,次の手順による。
・ 各コイル信号(x,y,z)を別々に測定する。
・ B(t)の値を得るために信号を積分する。
・ 各コイルに離散フーリエ変換を行い,i(i=1,2,3,…)番目の離散周波数f(i)=i/T0における実効値を
表す離散振幅スペクトルの推定値B(i)を得る(T0:観測時間)。
・ 離散スペクトルB(i)から,j(j=1,2,3,…)番目に磁束密度が極大となるB(j),対応する周波数f(j)を
特定する。
・ 全ての離散スペクトル線B(j)で全3方向のベクトル加算を行う。
)
(
)
(
)
(
)
(
2z
2y
2x
j
B
j
B
j
B
j
B
+
+
=
······················································· (4)
最後の二つの処理アルゴリズムは,式(4)でB(j)の代わりにB(i)を用いる場合,入れ換えることができる。
結果は,検出された各周波数での磁束密度の値となる。
測定値と限度値とを比較する場合,参考レベルBRL(j)を用いる。局所的な磁界を発生する機器では,附
7
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
属書Cで規定する結合係数ac(r1)を織り込む。複数の周波数成分をもつ磁界では,周波数重み付け合計の
計算が必要となる。
重み付け結果は,式(5),又は結合係数を織り込んだ式(6)によって求める。
∑
=
n
j
j
B
j
B
W
1
2
RL
n
)
(
)
(
=
·································································· (5)
n
1
c
nc
)
(
W
r
a
W
×
=
········································································· (6)
ここに,
Wn: 1回の測定での重み付け結果
B(j): 測定スペクトルのj番目の周波数線における磁束密度
BRL(j): j番目の周波数における磁束密度の参考レベル
Wnc: 不均一な磁界の結合を考慮してac(r1)を織り込んだ1回の測
定での重み付け結果
ac(r1): 附属書C又は表D.3による結合係数
注記1 結合係数は,周波数に依存しない。詳細については,附属書Cを参照。
決定した重み付け結果Wは,値1を超えてはならない。
1とだけ比較する場合は,平方根を得る必要はない。
注記2 単純な総和は,ばく露量が過大評価となる。したがって,高調波成分又は雑音成分が含まれ
る広帯域磁界では,総和式による結果を限度値と比較することは,振幅が同位相にないため
に,安全側(不適合を適合とする間違いをしない。)の判定となる。大半の測定器では相対位
相を測定しない(スペクトルアナライザを用いる場合など)が,周波数成分の実効値の総和
は求める。通常,位相を完全に無視するよりは,現実的な結果が得られる。
5.5.4
代替試験方法
電源周波数及びその高調波だけの磁界が発生するような機器の場合は,2 kHz未満の周波数における試
験だけでよい。
こうした機器では,選択した参考レベルに基づいて,簡略化した手順によって試験できる。
注記1 このような方法は,いずれも安全側を考慮したものである。値として測定しないで,合格又
は不合格の判定を行う。このような手順で不合格になっても,この規格の要求事項を満たし
ていないということを意味するものではない。このような場合は,5.5.2又は5.5.3の詳細な
方法を採用するのがよい。
注記2 JIS C 61000-3-2に従って,高調波電流の測定が可能である。多くの場合,このような値は既
知となっている。
5.5.4.1
特定勾配で減少する参考レベル
調査対象周波数範囲の参考レベルが1/f以下の勾配で減少する場合は,次の5.5.4.1.1又は5.5.4.1.2のい
ずれかを適用するのがよい。
注記 この箇条は,例えば附属書Bに示す,時間的に変化する電界及び磁界への公衆ばく露に対して
のICNIRPの指針[11]の参考レベルが該当する。
5.5.4.1.1
特定勾配,第一手順
次の二つの条件を満たす場合,機器は,この規格の要求事項に適合する。
・ 重み付けをしない(伝達関数を適用しない)広帯域測定時の磁束密度Bが,電源周波数における参考
レベルの30 %未満である。
・ 振幅が電源周波数における振幅の10 %より大きい全ての高調波電流が,調査対象周波数範囲全体で連
8
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
続的に減少する。
最初の条件(Bが基準レベルの30 %未満。)を満たしていない場合は,5.5.4.1.2の手順での適合性を確認
するのがよい。
5.5.4.1.2
特定勾配,第二手順
次の三つの条件を全て満たす場合,機器は,この規格の要求事項に適合する。
・ 電源周波数における磁束密度が,電源周波数における参考レベルの50 %未満である。
・ 電源周波数の入力を抑制(アクティブノッチフィルタ)して,重み付けをしない(伝達関数を適用し
ない)広帯域測定時の測定磁束密度Bが,調査対象周波数範囲全体で,電源周波数における参考レベ
ルの15 %未満である。
・ 振幅が電源周波数における振幅の10 %より大きい全ての高調波電流が,調査対象周波数範囲全体で連
続的に減少する。
5.5.4.2
参考レベル一定
参考レベルが電源周波数の第10次高調波まで一定であり,かつ,調査対象周波数範囲の中で,第10次
高調波より高い周波数で,一定又は1/f以下の勾配で減少する場合は,高調波電流の追加測定を行うこと
なく,5.5.4.1で規定する方法を適用できる。
注記 この箇条は,例えば附属書Bに示す,0 kHz〜3 kHzの電界及び磁界への人体ばく露に対しての
IEEE C95.6:2002 [12]安全規格の参考レベルが該当する。
この簡略化した試験方法は,次の5.5.4.2.1又は5.5.4.2.2による。
5.5.4.2.1
参考レベル一定,第一手順
次の条件を満たす場合,機器は,この規格の要求事項に適合する。
・ 重み付けをしない(伝達関数を適用しない)広帯域測定時の測定磁束密度Bが,電源周波数における
参考レベルの30 %未満である。
この条件を満たしていない場合は,5.5.4.2.2の手順によって適合性を調べるのがよい。
5.5.4.2.2
参考レベル一定,第二手順
次の二つの条件を満たす場合,機器は,この規格の要求事項に適合する。
・ 電源周波数における磁束密度Bが,電源周波数における参考レベルの50 %未満である。
・ 電源周波数の入力を抑制(アクティブノッチフィルタ)して,重み付けをしない(伝達関数を適用し
ない)広帯域測定での測定磁束密度Bが,調査対象周波数範囲全体で,電源周波数における参考レベ
ルの15 %未満である。
5.6
測定の不確かさ
測定全体での不確かさの最大は,限度の25 %を超えてはならない。不確かさの評価に関する手引は,JIS
C 1910による。
注記1 測定の不確かさには,センサの位置,動作条件,背景雑音又は測定器の仕様範囲を超える信
号の影響を含んでいる。
注記2 測定の不確かさが測定値の25 %を超える場合,用いる限度値にこの不確かさを換算する必要
がある。
結果を限度値と比較する必要がある場合,測定の不確かさを次のように処理する。
・ 機器から発生する磁界が限度値以下であることを確認する場合は,結果に測定の不確かさを加え,そ
の和を限度値と比較する。
注記3 例えば,製造業者が行う測定には,この方法を適用する。
9
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
・ 機器から発生する磁界が限度値を超えていることを確認する場合は,結果から測定の不確かさを減じ
て,その差を限度値と比較する。
注記4 例えば,市場を監視する目的で行う測定には,この方法を適用する。
5.7
試験報告書
試験報告書には,次の項目を記載する。
・ 機器の識別
・ 測定器の仕様
・ 附属書Aに規定がない場合は,動作条件,測定位置及び測定距離
・ 定格電圧及び周波数
・ 測定方法
・ 重み付け測定の最大値。ただし,結合係数が適用できる場合には,結合係数を織り込んだ重み付けの
最大値
・ 適用した限度値
・ 測定結果が限度値の75 %を超える場合は,測定の不確かさ
6
結果の評価
測定結果が次のいずれかの場合,この規格に適合する。評価には,5.6に規定する測定の不確かさを考慮
する。
・ 測定値が参考レベルを超えていない場合。
・ 測定値が参考レベルを超える場合も,結合係数ac(r1)を用いることによって,基本制限への適合を示せ
る場合。特定の機器には,結合係数ac(r1)を附属書Cの規定によって決定できる。
・ 結合係数ac(r1)を織り込んだ値が参考レベルを超える場合も,基本制限への適合実証(例 計算手法を
用いる。)ができるとき。
注記 計算手法については,IEC 62226-1を使用できる。
10
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1−参考レベルに対しての評価試験方法選択のための推奨流れ図
機器の種類
線状スペク
トルか?
5.5.4:代替試験方法
5.5.3:線状スペクトル
評価
5.5.2:時間領域評価
結果
結果
結果
結合係数を使用
(表D.3参照)
結果
合格
不合格
合格
不合格
合格
不合格
合格
不合格
個々の結合係数決定
(附属書C参照)
結果
合格
不合格
誘導電流密度の計算
(附属書D参照)
基本制限に対
しての評価
合格
不合格
合格
不合格
はい
いいえ
はい
いいえ
電源周波数
及び高調波
だけか?
11
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
0
0
c)
(
B
f
B
=
1
1c)
(
B
f
B
=
n
f
Bdd
注記 縦軸及び横軸は対数スケールであり,
n
f
Bdd
は,両対数スケールでのBの勾配を表す。
図2−切換わり点を平滑化した参考レベルの周波数依存例
12
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
)
(
)
(
0
0
c
RL
0
0
c
=
=
=
B
f
B
A
f
A
1
0
c
RL
1
1c
)
(
)
(
B
f
B
A
f
A
=
=
1
d
d
d
d
−
=
n
n
f
B
f
A
注記 縦軸及び横軸は対数スケールであり,
n
f
Add
は,両対数スケールでのBの勾配を表す。
図3−図2の参考レベルに対応する伝達関数Aの例
13
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4−時間領域評価方法の概念図
センサコイル x
二乗
フィルタ
+
Brms
平均
伝達関数A
Bx
センサコイルy
二乗
フィルタ
センサコイルz
二乗
フィルタ
By
Bz
伝達関数A
伝達関数A
14
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
磁束密度測定のための条件
A.1 一般
測定は,機器を通常用いるときと同じ配置にして,表A.1に規定する条件で行う。
表A.1に規定していない機器の場合,又は機器を表A.1とは異なる条件で用いる場合,頭部及び胴体の
中枢神経組織に対する磁界の作用から人体を防護する目的で,動作条件,測定距離及びセンサ位置は次の
とおりとする。
a) 取扱説明書に動作条件,設置位置及び使用位置を明示している場合は,取扱説明書に記載している条
件で測定する。
b) a)以外については,A.1.1〜A.1.3に規定する条件で測定する。
注記 適用する限度値に手足のばく露限度値(B.2参照)が含まれる場合には,手足を対象とした測
定が必要になることもある。
A.1.1 動作条件
動作条件は,次による。
a) 設定は,最大とする。
b) 明確にするためCISPR 14-1に規定する動作条件又は無負荷動作が可能な場合には,無負荷運転条件。
短時間運転を想定した仕様の場合は,短時間運転を考慮する。
ならし運転の時間は規定しないが,試験の前に機器を十分な時間動作させ,通常使用時の動作条件と同
じになることを確認する。
機器は,定格電圧±2 %及び定格周波数±2 %の電源で,通常用いる場合と同じように動作させる。
電源電圧範囲及び/又は周波数範囲を示している場合は,電源電圧及び/又は周波数を,その機器を用
いることになる国又は地域の公称電圧及び/又は周波数と同じにする。
表A.1に規定がない場合,操作の設定は,最大となるように調節する。ただし,製造業者などによって
事前設定されている場合は,事前設定とする。測定は,機器が通電しているときに行う。
試験は,25 ℃±10 ℃の周囲温度で行う。
A.1.2 測定距離
測定距離は,次による。
a) 身体の該当部分に触れた状態で用いる機器:0 cm
b) その他の機器:30 cm
A.1.3 センサ位置
センサ位置は,次による。
a) 身体の該当部分に触れた状態で用いる機器:使用者に接触する位置。
b) 持ち運びできない大きな機器:正面(使用側)及び人が接近可能な位置(図A.1参照)。
c) その他の機器:周囲(図A.2参照)
15
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.2 特定の機器における測定距離,センサ位置及び動作条件
A.2.1 多機能機器
一つで複数の異なる機器の機能を提供する多機能機器は,機器の内部を改造することなく行う場合,そ
の機能ごとに別々に試験を行う。
機能ごとに別々に試験を行うことができない場合,又は特定の機能を分離すると,基本機能を果たすこ
とができなくなる場合,その機器は,動作に最低限必要となる機能を果たす状態で動作させる。
A.2.2 バッテリ駆動機器
機器を商用電源に接続できる場合,その機器は,使用可能な各条件で動作させて試験を行う。バッテリ
で動作させるときは,試験を開始する前にバッテリを完全に充電する。
A.2.3 測定距離及びセンサ位置
表A.1の測定距離は,頭部及び胴体の中枢神経組織に対する磁界の作用から人体を防護する目的で,通
常動作時に想定される使用者の位置に基づいて規定している。
機器の形状及び使い方は,国ごとの生活習慣によって異なるため,表A.1に規定する測定距離と,取扱
説明書に記載する動作条件,設置位置及び使用位置による使用者の頭部及び胴体との距離が異なる場合は,
取扱説明書の記載を優先した測定距離とする(例えば,ホットカーペットの取扱説明書で,直接座り,身
体の該当部分に触れた状態で用いる記載がある場合の測定距離は,表A.1に規定する30 cmではなく0 cm
となる。)。
手足のばく露に関しては,これ以外の測定距離及びセンサ位置を適用する場合がある。
表A.1−測定距離,センサ位置及び動作条件
機器の種類
測定距離r1
cm
センサ位置
動作条件
空気清浄器
(Air cleaner)
30
周囲
連続動作。
エアコン
(Air conditioners)
30
周囲
冷房:最低温度設定及び周囲温度30 ℃±5 ℃。
暖房:最高温度設定及び周囲温度15 ℃±5 ℃。
周囲温度は室内機への通気温度とする。
充電器
(非接触方式を含む。)
[Battery chargers (including
inductive)]
30
周囲
製造業者が規定する,最大容量の空のバッテリ
を充電しているとき。
ディスペンサ
(Beverage maker)
30
周囲
無負荷連続動作。
電気掛け毛布
(Blankets)
0
上面
断熱シートの上に広げて置く。
電気ミキサ
(Blender)
30
周囲
無負荷連続動作。
果物絞り器
(Citrus presses)
30
周囲
無負荷連続動作。
電気時計
(Clock)
30
周囲
連続動作。
コーヒーメーカ
(Coffee makers)
30
周囲
JIS C 9335-2-15の3.1.9(通常動作)の規定に基
づく。
コーヒーミル
(Coffee mills)
30
周囲
JIS C 9335-2-14の3.1.9.108の規定に基づく。
16
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−測定距離,センサ位置及び動作条件(続き)
機器の種類
測定距離r1
cm
センサ位置
動作条件
対流式ヒータ
(Convector heater)
30
周囲
最高出力。
電気揚げ物器
(Deep fat fryers)
30
周囲
JIS C 9335-2-13の3.1.9(通常動作)の規定に基
づく。
口こう(腔)衛生機器
(Dental hygiene appliances)
0
周囲
JIS C 9335-2-52の3.1.9(通常動作)の規定に基
づく。
電気脱毛器
(Depilatories)
0
カッタに対する面
無負荷連続動作。
食器洗い機
(Dishwashers)
30
上面,正面
皿を入れずに注水した洗浄モード。利用可能な
場合,乾燥モード。
電気卵ゆで器
(Egg boiler)
30
周囲
JIS C 9335-2-15の3.1.9(通常動作)の規定に基
づく。
フェイシャルスチーマ
(Facial sauna appliances)
10
上面
連続動作。
扇風機
(Fan)
30
周囲
連続動作。
ファンヒータ
(Fan heaters)
30
周囲
最高温度設定での連続動作。
床磨き機
(Floor polishers)
30
周囲
ブラシに機械的負荷を加えない状態で連続動
作。
フードプロセッサ
(Food processors)
30
周囲
最高速度設定での無負荷連続動作。
食品温蔵庫
(Food warming cabinets)
30
周囲
最高温度設定での無負荷連続動作。
足温器
(Foot warmers)
30
上面
最高温度設定での無負荷連続動作。
ガス着火装置
(Gas igniters)
30
周囲
連続動作。
グリル
(Grill)
30
周囲
最高温度設定での無負荷連続動作。
電気バリカン
(Hair clippers)
0
カッタに対する面
無負荷連続動作。
ヘアドライヤ
(Hair dryers)
10
周囲
最高温度設定での連続動作。
ホットカーペット
(Heating mats)
30
上面
断熱シートの上に広げて置く。
電気敷毛布
(Heating pads)
0
上面
断熱シートの上に広げて置く。
組込形調理こんろ
(Hobs)
30
上面,正面
JIS C 9335-2-6の3.1.9(通常動作)の規定に基
づく。各加熱部を最高設定で単独動作。
アイスクリームメーカ
(Ice-cream makers)
30
周囲
最高冷却温度設定で無負荷連続動作。
投込式ヒータ
(Immersion heaters)
30
周囲
発熱体を完全に浸水させる。
誘導加熱調理器
(Induction hobs and hotplates)
図A.3参照 A.3.1参照
A.3.2参照
17
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−測定距離,センサ位置及び動作条件(続き)
機器の種類
測定距離r1
cm
センサ位置
動作条件
アイロン
(Irons)
30
周囲
JIS C 9335-2-3の3.1.9(通常動作)の規定に基
づく。
アイロン応用機器
(Ironing machines)
30
周囲
JIS C 9335-2-3の3.1.9(通常動作)の規定に基
づく。
ジューサ
(Juice extractors)
30
周囲
無負荷連続動作。
電気やかん
(Kettles)
30
周囲
水を半分満たす。
料理用はかり
(Kitchen scales)
30
周囲
無負荷連続動作。
電気包丁
(Knives)
30
周囲
無負荷連続動作。
アタッチメント付換式調理機
器
(Kitchen machines and slicer)
30
周囲
最高速度設定での無負荷連続動作。
マッサージ機器
(Massage appliances)
0
マッサージヘッド
に対する面
最高速度設定での無負荷連続動作。
電子レンジ
(Microwave ovens)
(マイクロ波の漏えいは,JIS
C 9335-2-25による。)
30
周囲
最高マイクロ波出力で連続動作。通常の発熱体
を利用している場合は,最高設定にして同時動
作する。負荷は棚中央に置いた1 Lの水道水。
水を入れる容器は,ガラス,プラスチックなど
非導電性の材料とする。
電気泡立て器
(Mixer)
30
周囲
最高速度設定での無負荷連続動作。
オイルヒータ
(Oil filled radiators)
30
周囲
最高温度設定での連続動作。
電気オーブン
(Ovens)
30
上面,正面
オーブンは空の状態でドアを閉める。サーモス
タットは最高温度設定。クリーニングモードが
ある場合は,取扱説明書にあるとおりに行う。
オーブン一体形調理こんろ
(Ranges)
30
上面,正面
機能ごとに別々に動作。
レンジフード
(Range hoods)
30
底面,正面
最高設定。
冷蔵庫(冷凍庫)
(Refrigeration appliances)
30
上面,正面
ドアを閉めて連続動作。サーモスタットは最高
冷却設定。庫内は空にする。測定は安定状態に
達してから,全ての区画で冷却動作が働いてい
る状態で行う。
電気炊飯器
(誘導加熱方式を含む。)
(Rice cookers)
30
周囲
水を半分入れ,最高温度設定。
電気ひげそり器
(Shaver)
0
カッタに対する面
無負荷連続動作。
スライサ
(Slicing machines)
30
周囲
最高速度設定での無負荷連続動作。
日光浴器
(Solaria)
内側
0
外側
30
正面
最高設定での連続動作。
18
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−測定距離,センサ位置及び動作条件(続き)
機器の種類
測定距離r1
cm
センサ位置
動作条件
脱水機
(Spin extractor)
30
上面,正面
無負荷連続動作。
蓄熱式ヒータ
(Storage heaters)
30
周囲
最高温度設定での連続動作。
ティーメーカ
(Tea makers)
30
周囲
無負荷連続動作。
トースタ
(Toaster)
30
周囲
最高温度設定での無負荷動作。
電動工具(手持ち形)
(Tools, hand-held)
30
周囲(同じ面が常
に使用者に向かな
い場合)
全設定,例えば,最高速度設定での無負荷動作。
電動工具(手誘導形)
(Tools, hand-guided)
30
周囲(同じ面が常
に使用者に向かな
い場合)
全設定,例えば,最高速度設定での無負荷動作。
電動工具(可搬形)
(Tools, transportable)
30
上面及び使用者に
向いた正面
全設定,例えば,最高速度設定での無負荷動作。
発熱体をもつ電動工具
(Tools with heating elements)
30
周囲(同じ面が常
に使用者に向かな
い場合)
最高温度設定。
グルーガンは,接着剤を入れて作業位置に置く。
玩具用変圧器
(Transformer for toys)
30
周囲
連続動作。
軌道セット:電気・電子制御
装置
(Track sets: electric and
electronic controls)
30
周囲
連続動作。
衣類乾燥機
(Tumble dryers)
30
上面,正面
事前に洗ってある布での乾燥モード。布は,乾
燥時に140 g/m2〜175 g/m2で,寸法が約0.7 m×
0.7 m,二重ふち縫いした木綿シーツとする。
掃除機(手持ち形)
(Vacuum cleaners, handheld)
30
周囲
JIS C 9335-2-2の3.1.9(通常動作)の規定に基
づく。
掃除機(肩掛け形)
(Vacuum cleaners, body sling)
0
使用者に面した側
の周囲
JIS C 9335-2-2の3.1.9(通常動作)の規定に基
づく。
掃除機(その他)
(Vacuum cleaners, others)
30
周囲
JIS C 9335-2-2の3.1.9(通常動作)の規定に基
づく。
洗濯機及び洗濯乾燥機
(Washing
machines
and
washers dryers)
30
上面,正面
布を入れない状態で,最高速度の脱水モード。
ウォータベッドヒータ
(Water-bed heaters)
10
上面
断熱シートの上に広げて置く。
給湯器
(Water heaters)
30
周囲
最高設定。必要であれば,水を流す。
ジェットバス
(Whirlpool bath)
内側
0
外側
30
周囲
連続動作。
注記 ウォータベッドヒータ,ヘアドライヤ及びフェイシャルスチーマに対して測定距離10 cmを規定している。
この距離は,A.1.2に規定していないが,取扱説明書に記載されると考えられる一般的な使用位置を考えた測
定距離である。
19
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
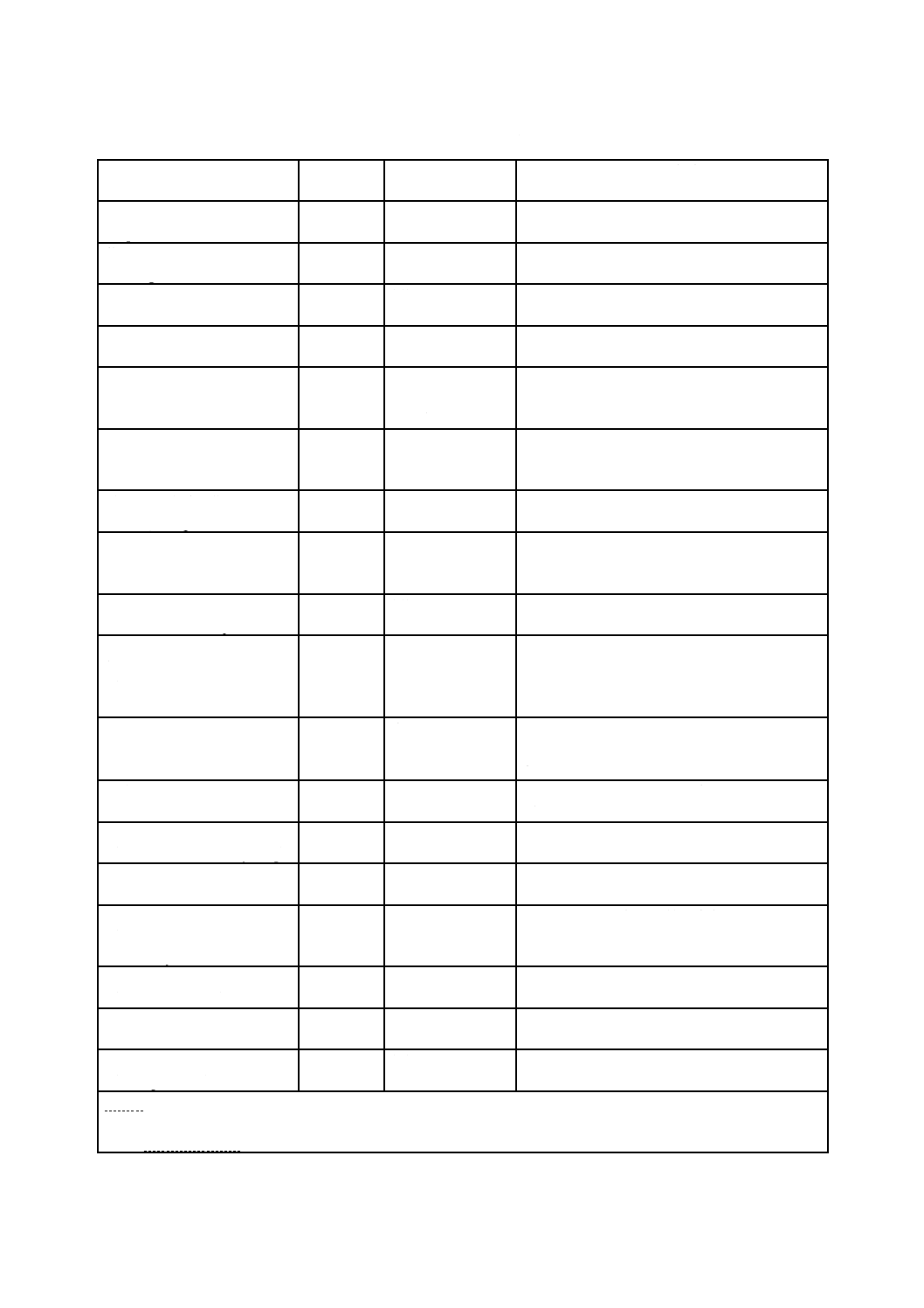
センサは,機器の上面又は正面の表面から距離r1の面に沿って移動させる。
図A.1−測定位置:上面又は正面(3.2.7参照)
センサは,機器表面から垂直距離r1の,人が近付く可能性がある周囲を一巡させる。
図A.2−測定位置:周囲(3.2.7参照)
A.3 誘導加熱調理器の試験条件
A.3.1 測定距離
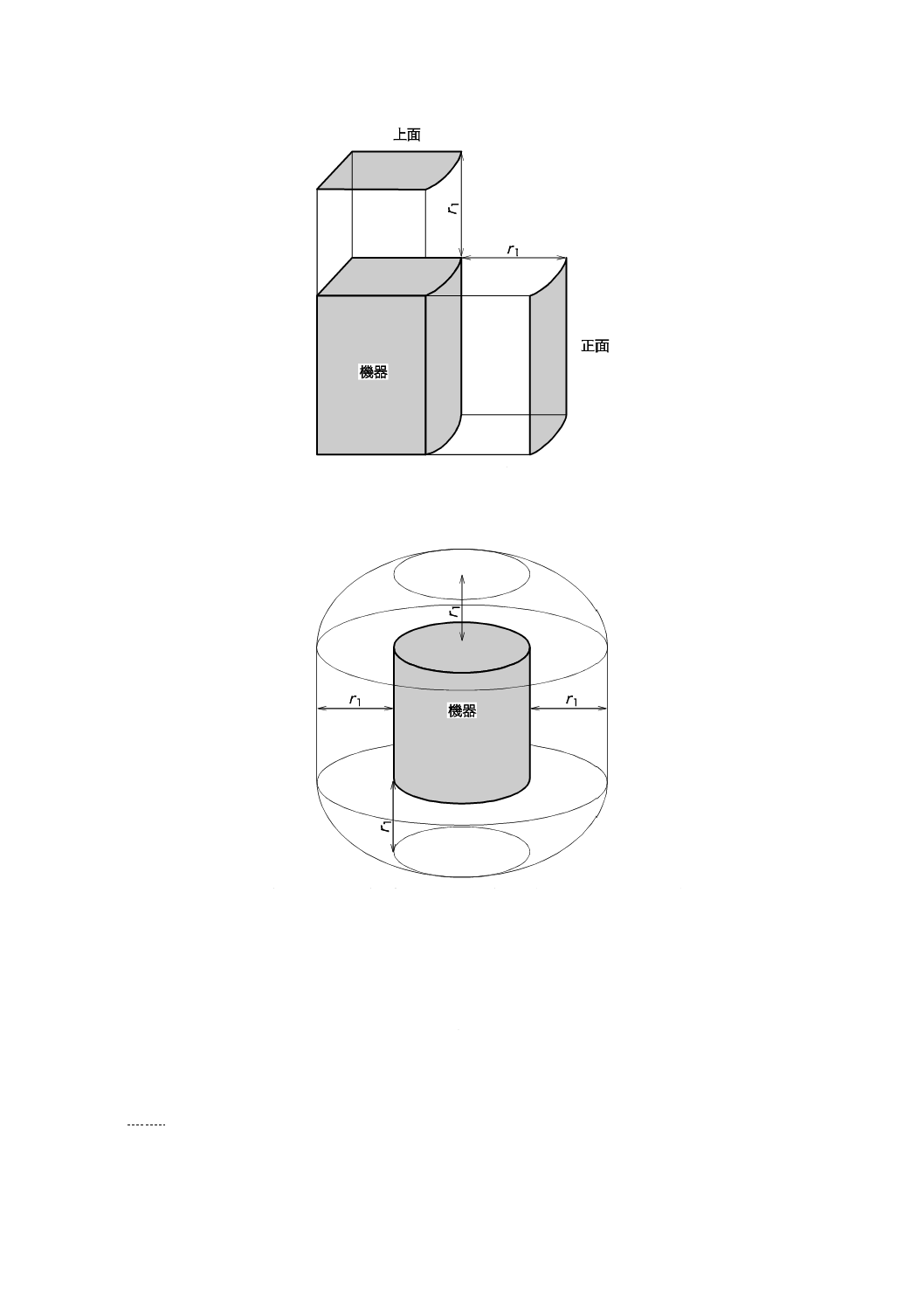
調理面別に,機器の端面からセンサ表面までの距離が30 cmとなる,4本の鉛直線(図A.3の線A,B,
C及びD)上で測定を行う(図A.3参照)。調理面の上方1 mの地点から下方0.5 mの地点まで測定を行う。
機器を壁際に置いて用いるように意図している場合は,機器の背後(図A.3の線D)での測定は行わない。
注記 調理面の中心に対応する位置付近で,磁界が最大となるため,調理面の中心線上で測定する。
A.3.2 動作条件
水道水を半分ほど満たしたほうろう加工の鉄製調理容器を,測定対象となる調理面の中央に配置する。
20
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
取扱説明書で推奨している,最も小さい調理容器を用いる。推奨容器を指定していない場合は,標準調
理容器の中の,動作可能な最も小さい容器を用いる。標準調理容器の底の直径は,110 mm,145 mm,180 mm,
210 mm及び300 mmとする。
加熱部は,ほかの調理面に鍋を置いていない状態で,調理面を一つずつ順番に動作させる。
出力は,最高設定にする。
測定は,安定した動作条件に達してから行う。
安定した条件に達しない場合は,変動する磁界発生源の最高値が確実に測定されるように,適切な観測
時間(例 30秒)を指定することが望ましい。
注記 誘導加熱部間で電源を共有しているために,各誘導加熱部を単独で運転しているときに,誘導
加熱調理器の最高の連続磁界が測定される。
注記1 線A,B,C及びDは測定位置を示す。
注記2 この図は,4口の誘導加熱部のうち左手前の誘導加熱部が動作していることを示す。
図A.3−誘導加熱調理器の測定距離
21
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
ばく露限度値
この附属書に示す限度値は参考であり,また,限度値の全体ではなく,抜粋した箇所だけを示す。
法令で限度値の設定がある場合,法令による限度値を用いる。
B.1
ICNIRPの指針
表B.1及び表B.2に示す数値は,ICNIRPの指針[11]から転載したものである。
注記 このICNIRPの指針は1998年に発行されたものである。1 Hz〜100 kHzの周波数帯域について
は,2010年に部分改正されている[26]。
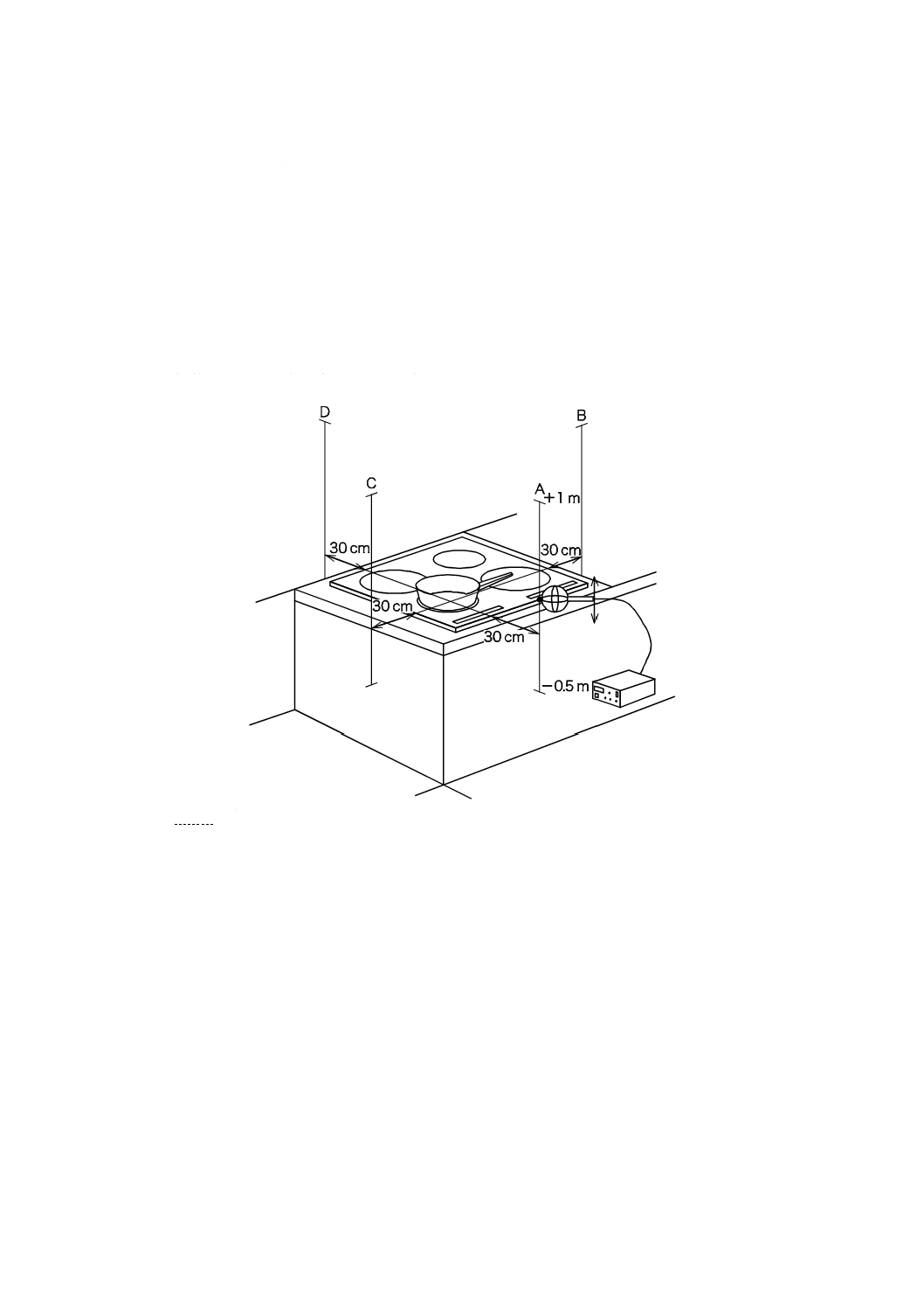
表B.1−時間的に変化する周波数10 GHz以下の電磁界への公衆のばく露における基本制限−抜粋
周波数範囲
頭部及び胴体の電流密度
(実効値)
mA/m2
全身平均SAR
W/kg
局所SAR
(頭部及び胴体)
W/kg
局所SAR
(手足)
W/kg
1 Hz以下
8
−
−
−
1 Hzを超え
4 Hz以下
8/f
−
−
−
4 Hzを超え
1000 Hz以下
2
−
−
−
1 kHzを超え
100 kHz以下
f/500
−
−
−
100 kHzを超え
10 MHz以下
f/500
0.08
2
4
10 MHzを超え
10 GHz以下
−
0.08
2
4
注記1 fは,ヘルツ(Hz)を単位とした周波数。
注記2 SARは,比エネルギ吸収率を示す。
表B.2−時間的に変化する電磁界への公衆のばく露における参考レベル(ひずみのない実効値)−抜粋
周波数範囲
電界強度
V/m
磁界強度
A/m
磁束密度
μT
等価平面波電力密度Seq
W/m2
1 Hz以下
−
3.2×104
4×104
−
1 Hzを超え
8 Hz以下
10 000
3.2×104/f 2
4×104/f 2
−
8 Hzを超え
25 Hz以下
10 000
4 000/f
5 000/f
−
0.025 kHzを超え
0.8 kHz以下
250/f
4/f
5/f
−
0.8 kHzを超え
3 kHz以下
250/f
5
6.25
−
3 kHzを超え
150 kHz以下
87
5
6.25
−
0.15 MHzを超え
1 MHz以下
87
0.73/f
0.92/f
−
1 MHzを超え
10 MHz以下
87/f 1/2
0.73/f
0.92/f
−
10 MHzを超え
400 MHz以下
28
0.073
0.092
2
400 MHzを超え
2000 MHz以下
1.375 f 1/2
0.003 7 f1/2
0.004 6 f 1/2
f/200
2 GHzを超え
300 GHz以下
61
0.16
0.20
10
注記 fは,周波数範囲の欄に示す単位で表す。
22
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.2
IEEE規格
表B.3及び表B.4に示す数値は,IEEE規格(IEEE C95.6:2002)[12]から転載したものである。
表B.3−人体の各部位に適用される3 kHz以下の公衆のばく露における基本制限−抜粋
ばく露される組織
fe
Hz
Eo(実効値)
V/m
脳
20
5.89×10−3
心臓
167
0.943
手,手首,足及び足首
3350
2.10
その他の組織
3350
0.701
表の解釈は,次による。
Ei=Eo(f≦feの場合),Ei=Eo(f/fe)(f ≧feの場合)
ここに, fe: 生体内電界の周波数パラメータ
Ei: 生体内電界の最大許容値
Eo: 生体内電界
表中の制限に加えて,10 Hz以下の磁界への頭部及び胴体のばく露は,公衆の
場合,ピーク値167 mTに,管理環境の場合,ピーク値500 mTに制限する。
表B.4−公衆のばく露における磁界限度値:頭部及び胴体のばく露−抜粋
周波数範囲
Hz
B(実効値)
mT
H(実効値)
A/m
0.153 未満
118
9.39×104
0.153 以上
20 未満
18.1/f
1.44×104/f
20 以上
759 未満
0.904
719
759 以上
3000 未満
687/f
5.47×105/f
3000 以上
100 kHz未満
−
164
周波数3 kHz以上の限度値は,3 kHzを超える周波数に関するIEEE規格(IEEE
C95.1:1999)[21]との整合性を示すために記載する。
23
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
結合係数の決定
C.1 計算による結合係数の決定
附属書Bに示す参考レベル(BRL)は,均一な磁界で定義する。これに対して,この規格が対象とする
機器の周囲は,強い不均一性をもっている磁界である。結合係数ac(r1)は,この不均一性を考慮する係数で
ある。同様に,結合係数ac(r1)は,磁界中の人体の構成部分の寸法も考慮している。
この結合係数ac(r1)は,磁界発生源が局所的な場合に限って適用できる。ホットスポットでの磁束密度
Bmax〜0.1 Bmaxの磁界分布は,連続でなければならない。
参考レベルBRLと比較する,補正した測定値Bmc(r1)は,式(C.1)によって測定値Bmを用いて計算する。
Bmc(r1)=ac(r1)×Bm 及び Wnc=ac(r1)×Wn ·································· (C.1)
結合係数ac(r1)は,動作の基本周波数を対象として,次の四つのステップによって決定する。
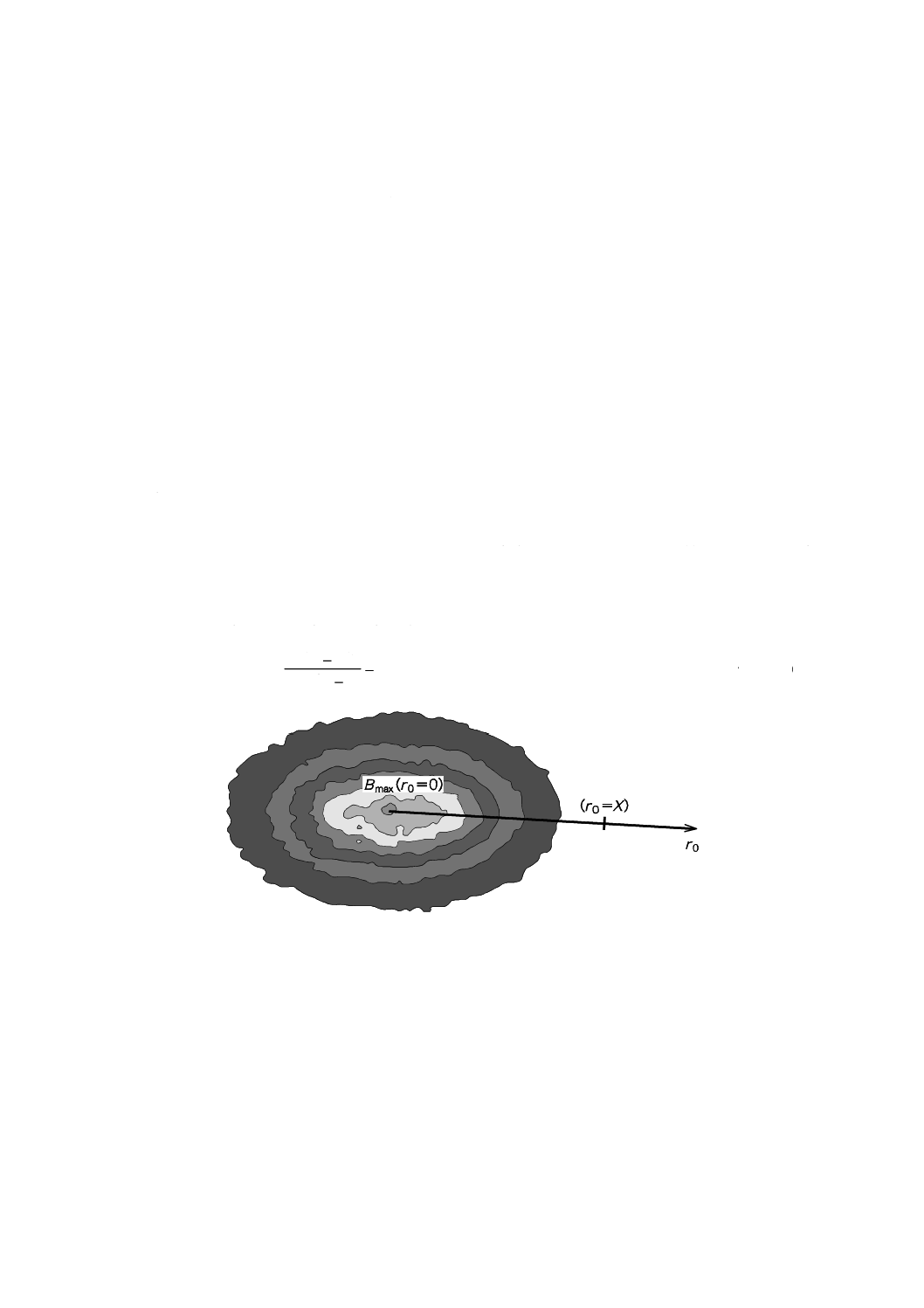
ステップ1 ホットスポットの広がり評価
磁束密度B(r0)は,ホットスポットr0=0を始点とする最も緩い勾配の線に沿った面の接線方向で測定す
る[式(C.2)参照]。図C.1及び図C.2に示すように,磁束密度がホットスポットでの最大値の10 %に減少
するr0=Xの地点まで測定を行う。測定間隔は,0.5 cm〜1 cmとする。
結合係数決定のための測定評価は,狭帯域での動作周波数で行う。
センサは,例えば,5.4に規定する測定面積が3 cm2の小形のものを用いる。
1.0
)0
(
)
(
0
max
0
=
=
=
r
B
X
r
B
···································································· (C.2)
図C.1−ホットスポット
24
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
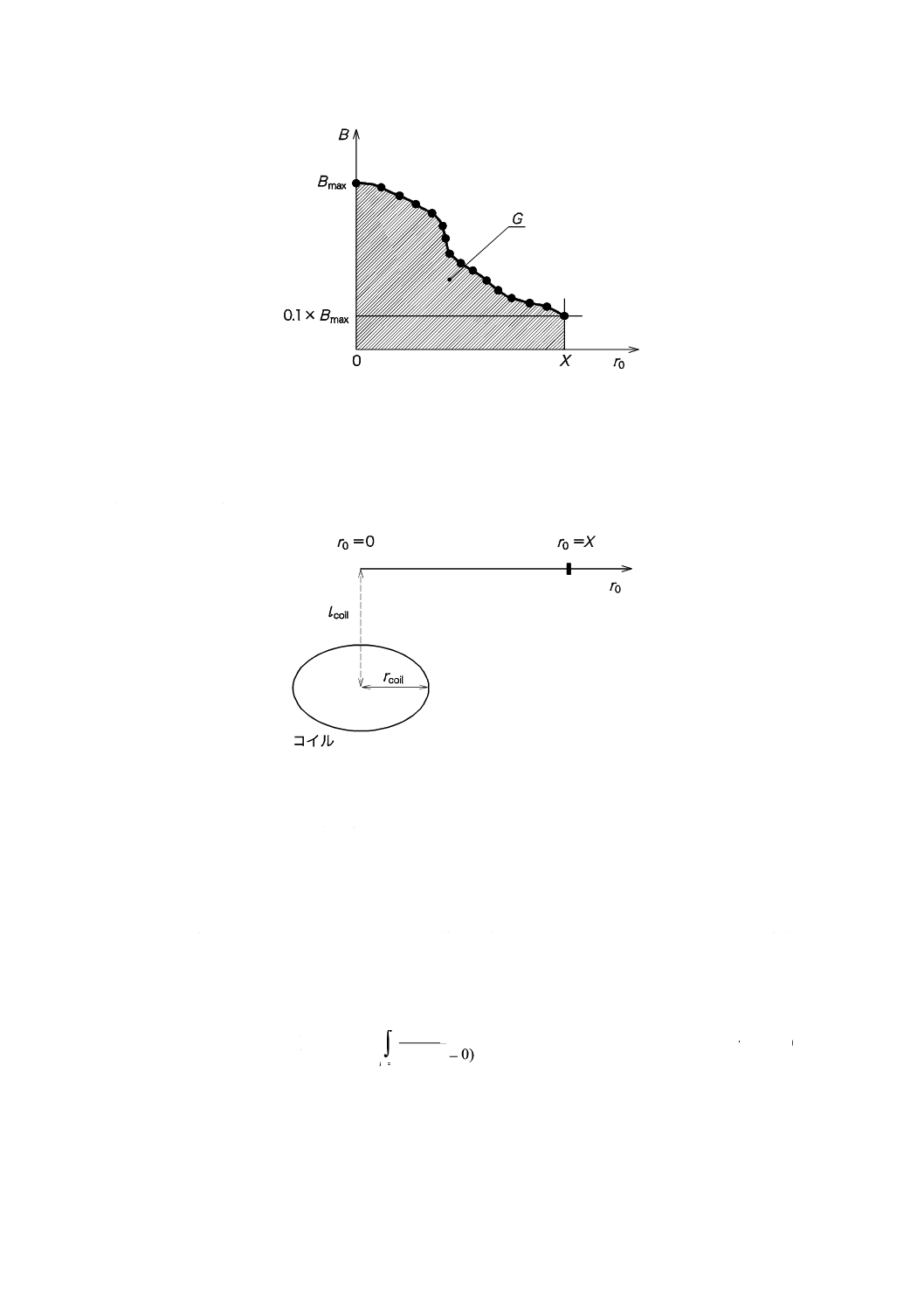
図C.2−磁束密度の勾配及び積分値G
ステップ2 等価コイルの決定
ステップ1の測定結果を用いて,機器内の磁界発生源と同じ程度の積分値Gが得られる等価なコイルの
半径を決定する。このコイルの位置は,ホットスポットr0=0からlcoilの距離にあると仮定して計算を行う。
距離lcoilは,機器内の磁界発生源の位置に相当している(図C.3参照)。
図C.3−等価コイルの位置
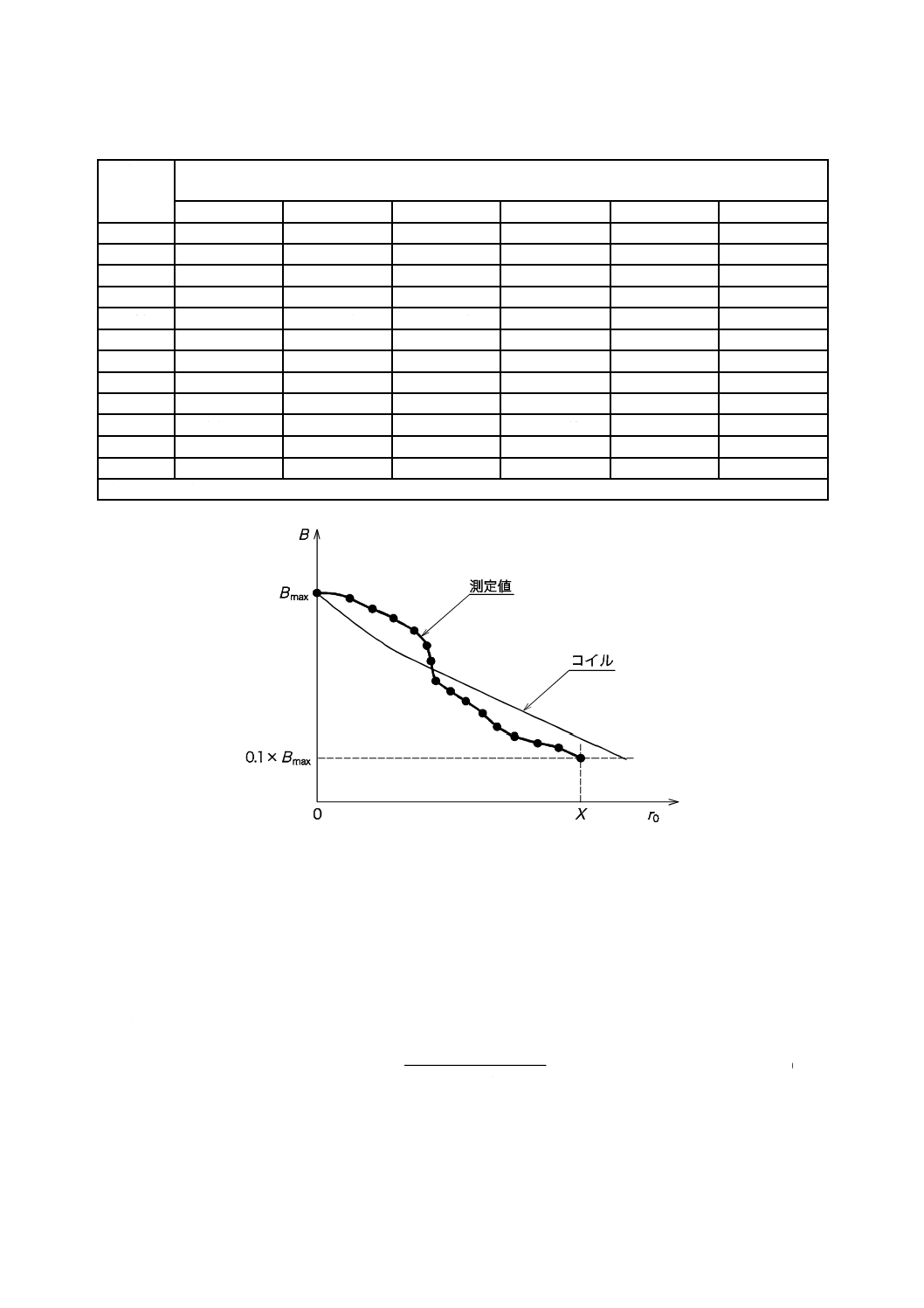
正規化された磁束密度の測定値の積分によって単一の値のGが得られ,これを用いて等価コイルの半径
rcoilを決定する(表C.1参照)。線形補間によって表C.1にないrcoilの値も得られる。この値は,lcoilを超え
てはならない。
小形の機器の場合は,磁界発生源が機器の中央にあるとみなす。大形の機器の場合は,機器の構造を調
査して磁界発生源の位置を決定する。
この手順が適用できるのは,磁界発生源が局所的な場合に限られる。ホットスポットでの磁束密度Bmax
〜0.1 Bmaxの磁界分布は,連続でなければならない(図C.4参照)。
積分値Gは,式(C.3)によって求める。
0
0
0
max
0
coil
coil
d)0
(
)
(
)
(
0
0
r
r
B
r
B
l
r
G
X
rr∫==
=
=
,
················································· (C.3)
25
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表C.1−様々なコイルの半径rcoilに対する積分値G
距離lcoil
mm
積分値G
m
rcoil=10 mm
rcoil=20 mm
rcoil=30 mm
rcoil=50 mm
rcoil=70 mm
rcoil=100 mm
10
0.013 54
−
−
−
−
−
15
0.015 62
−
−
−
−
−
20
0.018 48
0.027 03
−
−
−
−
25
0.021 68
0.028 80
−
−
−
−
30
0.025 11
0.031 17
0.040 51
−
−
−
35
0.028 61
0.033 90
0.042 17
−
−
−
40
0.032 22
0.036 89
0.044 29
−
−
−
50
0.039 55
0.043 34
0.049 41
0.067 50
−
−
70
0.054 48
0.057 18
0.061 64
0.075 35
0.094 44
−
100
0.077 11
0.079 05
0.082 19
0.092 13
0.106 44
0.134 93
200
0.153 17
0.154 15
0.155 73
0.160 85
0.168 45
0.184 20
300
0.229 53
0.230 12
0.231 19
0.234 61
0.239 71
0.250 54
注記 最悪の条件に対応するコイルを得るために,指定の積分値Gで最小のコイル半径を選択することが望ましい。
図C.4−磁束密度の測定値及びコイルの磁束密度の勾配
ステップ3 係数kの決定
コイル半径rcoilを用いて,等価磁界発生源(コイル)と人体との間の距離rの係数k(r,rcoil,f,σ)を決
定する[式(C.4)及び式(C.5)参照]。
r=r1+lcoil·············································································· (C.4)
ここに,
r1: 測定距離(3.2.6参照)
lcoil: 機器内の等価コイルから表面までの距離
加算は,同一単位で行う。
k(r,rcoil,f,σ)=
)
,
,
(
)
,
,
,
(
sensor
coil
sensor
,
max
coil
max
A
r
r
B
f
r
r
J
σ
······································· (C.5)
ここに,
Jmax: 最大電流密度
Asensor: センサの測定面積
Bmax, sensor: 測定した磁束密度の最大値
周波数に依存する係数kは,コイルから人体までの距離r,人体の均一モデルの導電率σ,及びセンサの
26
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
面積に依存する。この周波数依存性については,基本制限ではなく参考レベルを対象とした係数に変換す
ることによって,周波数依存性を補うことができる(ステップ4参照)。
不均一な磁界の場合,人体表面に最も高い磁界の値が発生するので,σの値は,0.1 S/mである(D.4.2
参照)。次の式(C.6)は,5.4に規定する標準センサを用いたときのこのσの値に基づいている。全身に関す
るkの値を,表C.2に示す。
表C.2−人体全身に関する50 Hzでの係数kの値
距離r
cm
係数k
T
m
A
2
rcoil=10 mm
rcoil=20 mm
rcoil=30 mm
rcoil=50 mm
rcoil=70 mm
rcoil=100 mm
1
21.354
15.326
8.929
5.060
3.760
3.523
5
4.172
3.937
3.696
3.180
2.858
2.546
10
2.791
2.735
2.696
2.660
2.534
2.411
20
2.456
2.374
2.369
2.404
2.398
2.488
30
2.801
2.735
2.714
2.778
2.687
2.744
40
3.070
2.969
2.933
3.042
2.865
2.916
50
3.271
3.137
3.086
3.251
2.989
3.040
60
3.437
3.271
3.206
3.429
3.079
3.134
70
3.588
3.388
3.311
3.595
3.156
3.216
100
3.940
3.659
3.601
4.022
3.570
3.604
注記1 係数kは,D.4に記載する人体に該当する数値モデルに,コイルを磁界発生源として適用して決定する。こ
れが当てはまるのは磁界発生源に近い領域に限られ,均一な磁界には当てはまらない。
注記2 距離rよりも寸法の大きな半径rcoilは,この附属書の手順では決定できない。
その他の周波数f及びその他の導電率σにおける係数k*は,式(C.6)によって,表C.2の値から計算でき
る。
k*(r,rcoil)=
k
f
×
×
S/m
1.0
Hz
50
σ
·················································· (C.6)
ステップ4 結合係数の計算
結合係数ac(r)は,参考レベルを対象に係数kを変換した結果であり,式(C.7)によって決定できる。
ac(r,rcoil,f,σ)=k(r,rcoil,f,σ)×
)
(
)
(
)
(
)
(
)
(
BR
RL
coil
BR
RL
f
E
f
B
f
r
r
k
f
J
f
B
×
σ
σ
,
,
,
=
··· (C.7)
注記1 項EBR(f)は,IEEE規格及び2010年に発行されたICNIRPの指針で用いている基本制限に適
用している。
注記2 項JBR(f)は,1998年に発行されたICNIRPの指針に適用している。項BRL(f)/JBR(f)は,8 Hz〜
800 Hz及び1 kHz〜100 kHzで1/fに比例する。したがって,この範囲では,係数ac(r)は周波
数に依存しない。
5.5.2及び5.5.3に従って測定する場合,正規化周波数と同じfc0を用いる。そのため,結合係数ac(r)は,
式(C.8)になる。
ac(r,rcoil,fc0,σ)=k(r,rcoil,fc0,σ)×
)
(
)
(
)
(
)
(
)
(
0c
BR
0c
RL
0
c
coil
0c
BR
0c
RL
f
E
f
B
f
r
r
k
f
J
f
B
×
σ
σ
,
,
,
=
······ (C.8)
注記3 結合係数ac(r1)は,式(C.4)を用いて図C.5から決定できる。
全身に関してf =50 Hz及びσ=0.1 S/m,並びにコイルに関して距離r=50 cm及びrcoil=10 mmとして,
27
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ICNIRPの指針の基本制限JBR及び参考レベルBRLを適用して計算した場合の結合係数の例を,次に示す。
ac(r=50 cm,rcoil=10 mm,f=50 Hz,σ=0.1 S/m)
=k (r=50 cm,rcoil=10 mm,f=50 Hz,σ=0.1 S/m)×
)
Hz
50
(
)
Hz
50
(
BR
RL
=
=
f
J
f
B
=3.271
2
2
mA/m
2
T
100
T
A/m
μ
×
=0.163 5
胴体(その他の組織)に関してf=60 Hz及びσ=0.1 S/m,並びにコイルに関して距離r=50 cm及びrcoil
=10 mmとして,IEEE規格を適用した場合の限度値を用いた結合係数acの計算例を,次に示す。
ac(r=50 cm,rcoil=10 mm,f=60 Hz,σ=0.1 S/m)
6
0.050
V/m
701
.0
mT
904
.0
Hz
50
Hz
60
S/m
1.0
T
A/m
271
.3
)
Hz
60
(
)
Hz
60
(
Hz
50
S/m
1.0
)
S/m
1.0
Hz
50
mm
10
cm
50
(
2
BR
RL
coil
=
×
×
×
×
=
=
=
=
=
,
=
,
=
,
=
=
f
E
f
B
f
f
r
r
k
σ
σ
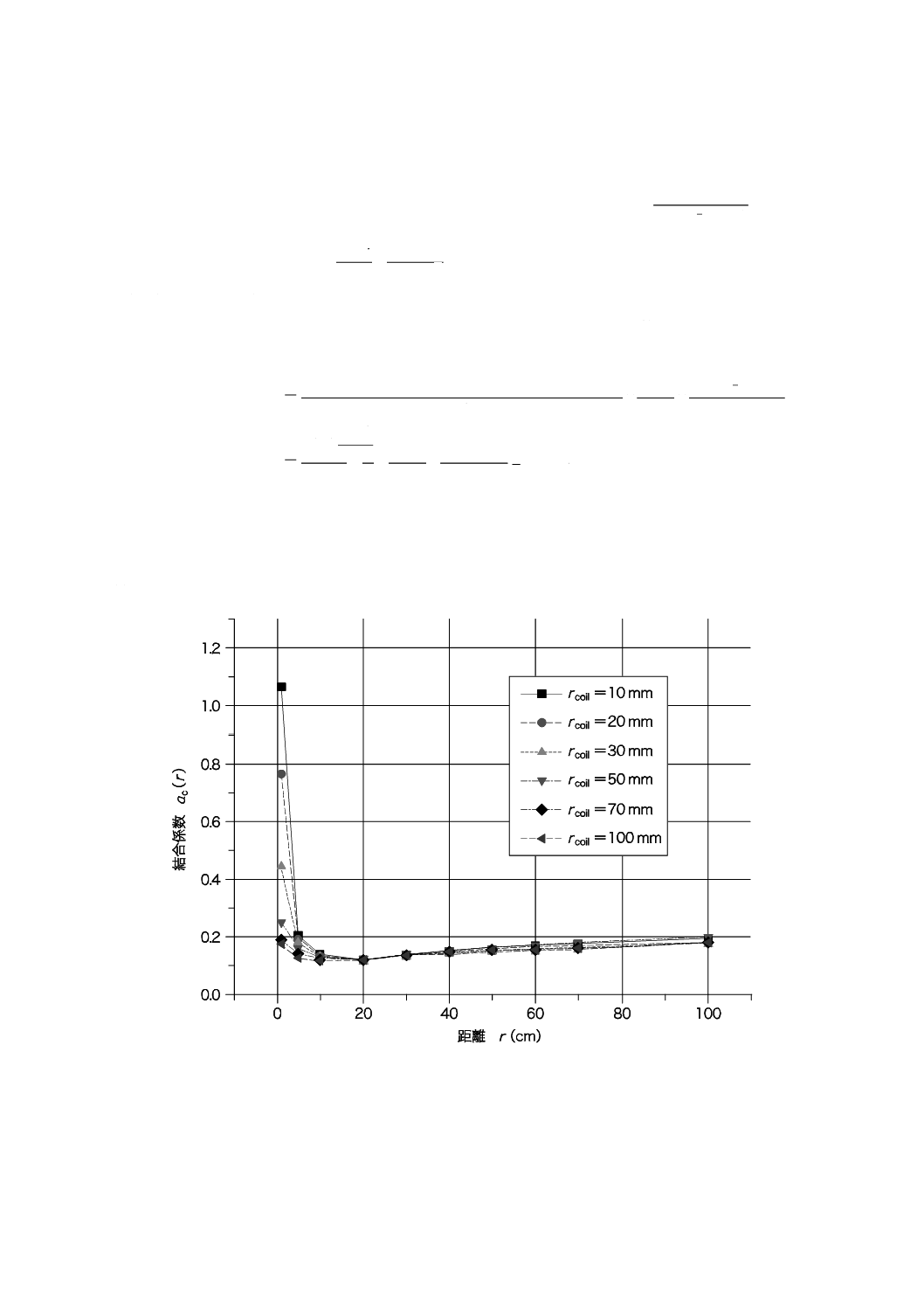
C.2 結合係数のグラフを用いた評価
結合係数は,図C.5から決定できる。この方法では,等価コイルの半径(rcoil)に依存する結合係数の値
が得られる。
図C.5−人体全身に関する0.1 S/m,Asensor=100 cm2の結合係数ac(r)
(1998年に発行されたICNIRPの指針の限度値を対象に計算した結合係数)
距離r=r1+lcoilのr1は,表A.1に規定する測定距離である。
28
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
附属書Bの限度値による計算例
D.1 伝達関数
1998年に発行されたICNIRPの指針の公衆ばく露の参考レベルBRL(f)を用いる場合,表D.1のように伝
達関数を計算できる(50 Hzで正規化した例を示す。)。
表D.1−1998年に発行されたICNIRPの指針の公衆ばく露を用いた伝達関数
(f1=10 Hz)≦f≦(fc1=800 Hz)
Hz
50
T
000
5
T
50
000
5
)
(
)
Hz
50
(
)
(
RL
0
c
RL
f
f
f
B
f
B
f
A
=
μ
μ
=
=
=
(fc1=800 Hz)≦f≦(f2=150 kHz)
16
T
25
.6
T
50
000
5
)
(
)
Hz
50
(
)
(
RL
0
c
RL
=
μ
μ
=
=
=
f
B
f
B
f
A
(f2=150 kHz)≦f≦(f3=400 kHz)
kHz
2.9
T
000
920
T
50
000
5
)
(
)
Hz
50
(
)
(
RL
0
c
RL
f
f
f
B
f
B
f
A
=
μ
μ
=
=
=
IEEE規格の公衆の磁界最大許容ばく露レベル(3.2.8参照)(頭部及び胴体のばく露)を用いる場合,表
D.2のように伝達関数を計算できる(60 Hzで正規化した例を示す。)。
表D.2−IEEE規格の公衆ばく露を用いた伝達関数
(f1=10 Hz)≦f≦(fc1=20 Hz)
z
H
20
mT
1.
18
mT
904
.0
)
(
)
Hz
60
(
)
(
RL
0
c
RL
f
f
f
B
f
B
f
A
=
=
=
=
(fc1=20 Hz)≦f≦(f2=759 Hz)
1
mT
904
.0
mT
904
.0
)
(
)
Hz
60
(
)
(
RL
0
c
RL
=
=
=
=
f
B
f
B
f
A
(f2=759 Hz)≦f≦(f3=3.35 kHz)
Hz
759
mT
687
mT
904
.0
)
(
)
Hz
60
(
)
(
RL
0
c
RL
f
f
f
B
f
B
f
A
=
=
=
=
(f3=3.35 kHz)≦f≦(f4=100 kHz)
41
.4
mT
205
.0
mT
904
.0
)
(
)
Hz
60
(
)
(
RL
0
c
RL
=
=
=
f
B
f
B
f
A
=
(f4=100 kHz)≦f≦(f5=400 kHz)
kHz
68
.
22
T
205
mT
904
.0
)
(
)
Hz
60
(
)
(
RL
0
c
RL
f
f
f
B
f
B
f
A
=
=
=
=
注記 周波数fの単位は,全てヘルツ(Hz)とする。
29
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
D.2 結合係数
結合係数を表D.3に示す。
表D.3−結合係数ac(r1)
機器のタイプa)
測定距離r1
cm
結合係数ac(r1)
1998年に発行された
ICNIRPの指針
結合係数ac(r1)
IEEE規格(60 Hz)
小
0
1.00
0.330
大
0
0.15
0.048
小
10
0.14
0.043
大
10
0.16
0.051
小
30
0.14
0.043
大
30
0.18
0.056
注記1 最悪状態の仮定では,全身について式(C.7)で計算する。
注記2 IEEE規格の参考レベルは,ICNIRPの指針の参考レベルより10倍ほど高いが,結合係数
が小さくなるのは,“その他の組織”では35倍ほどIEEE規格の値がICNIRPの指針の基
本制限より高いことによる。この手順は,基本制限に戻って計算する。
注a) 小:磁界発生源は,機器きょう体面内側のすぐ近くにある。
大:磁界発生源は,機器きょう体面から内側に10 cm〜40 cm離れている。
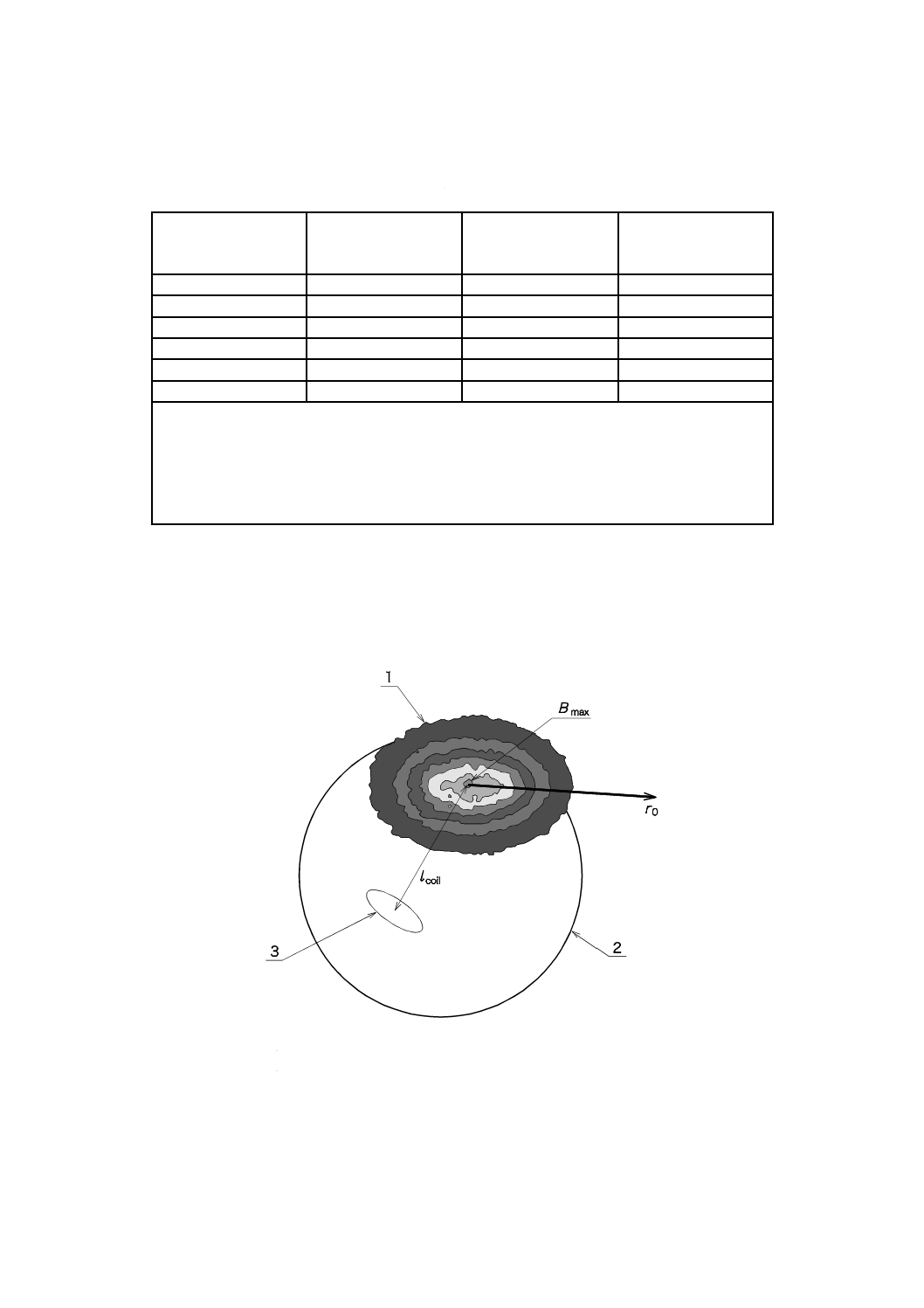
D.3 結合係数の決定例
附属書Cで規定するように,結合係数ac(r1)は,次の四つのステップで決定する。
ステップ1 ホットスポットの広がり評価
測定手順を図D.1に,測定結果を図D.2に示す。
1
ホットスポットに接する平面上で測定。
2
球形とした家電機器のモデル。
3
磁界発生源としての等価コイル。
図D.1−磁束密度の測定
30
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ステップ2 等価コイルの決定
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.010.020.030.040.050.060.070.080.09 0.1 0.110.120.130.140.15
接線方向距離 r0 (m)
磁
束
密
度
測
定
値
(正
規
化
)
正規化測定値
コイルモデル正規化計算値
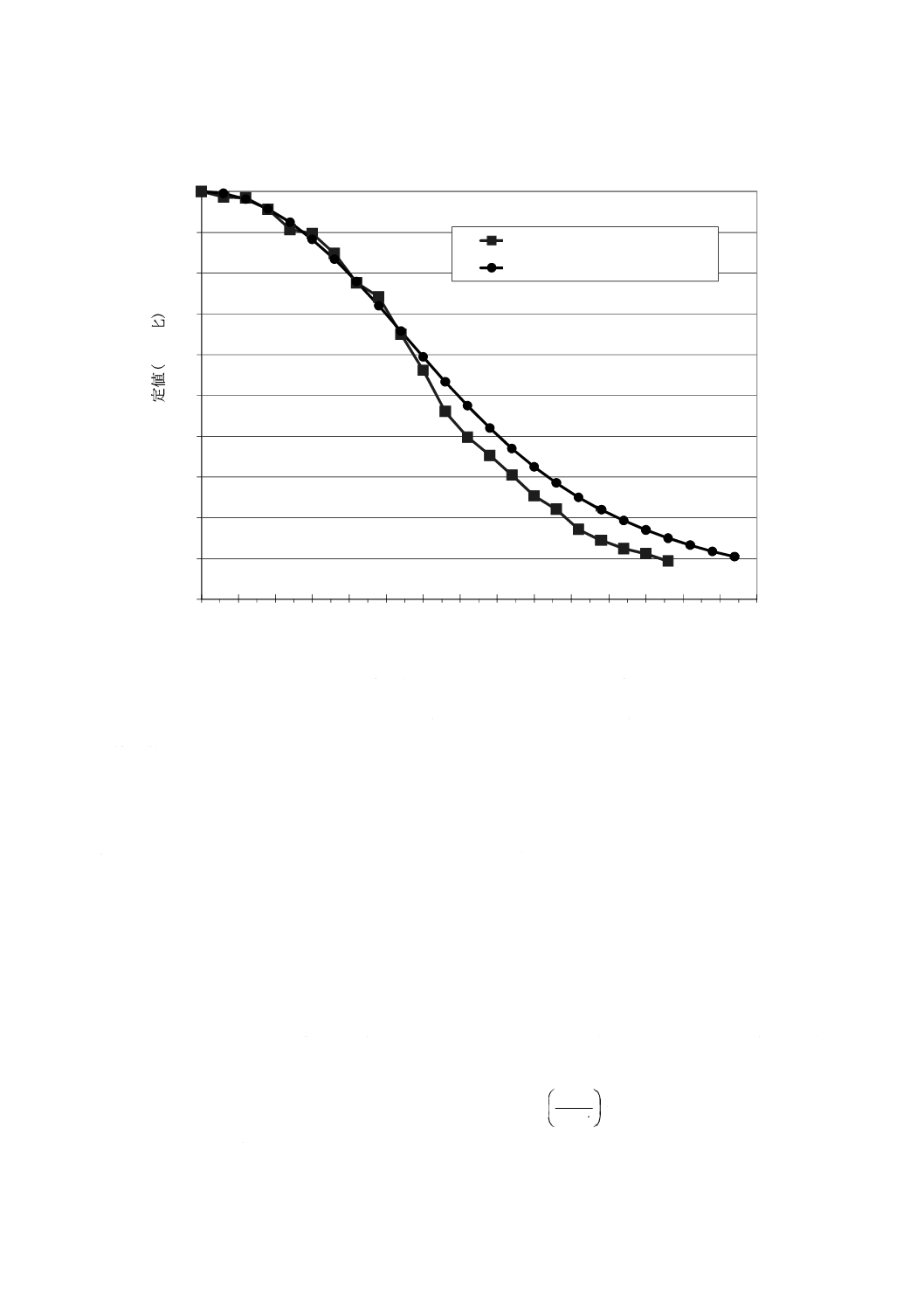
図D.2−接線方向距離r0に沿った正規化磁界分布
軸に沿って測定した磁束密度を正規化した曲線(図D.2の正方形付きの曲線)を積分して,G=0.071 66 m
の値が得られる。
ステップ3 係数kの決定
積分値Gの値を用いて,等価コイルの半径rcoilを決定する(表C.1参照)。このステップでは,測定した
家電機器の寸法に依存する距離lcoilを知ることが重要である。この例では,lcoil=70 mmとする。表C.1の
lcoil=70 mmの行で,実際の積分値G=0.071 66 mに最も近い値のG=0.075 35 mを選択して,rcoil=50 mm
を決定する。図D.2の黒丸付きの曲線は,決定したコイルの径による理論計算による曲線である。この図
からも分かるように,このコイルがよい近似となっている。
ここで,例えば,表C.2でr=7 cm,rcoil=50 mmとして,対象とする機器に依存するr1=0のときの係
数kを決定できる。最も近い値はr=5 cmであり,全身に対してk=3.180(σ=0.1 S/m,Asensor=100 cm2)
となる。
ステップ4 結合係数の計算
5.5.2及び5.5.3に従って測定する場合,重み付けによって50 Hzと等価になっているので,適切な評価
は既に終わっている。したがって,σ=0.1 S/mのときの結合係数ac(r)は,式(D.1)のようになる。
ac(r,σ)=k(r,f=50 Hz,σ)×50×10−3
2
A/m
T
····························· (D.1)
これによって,全身の場合の結合係数ac(r)=0.159となる。
31
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
σ≠0.1 S/mのときの結合係数ac(r)を求める場合は,係数に
S/m
1.0
σ
を乗じる。
σ=0.3 S/m(全身)の場合の結合係数の決定例を,次に示す。
ac(r)σ=0.3 S/m=0.159×
S/m
1.0
S/m
3.0
=0.477
D.4 結合係数の決定に関する追加説明
D.4.1 均一な人体の数値モデル
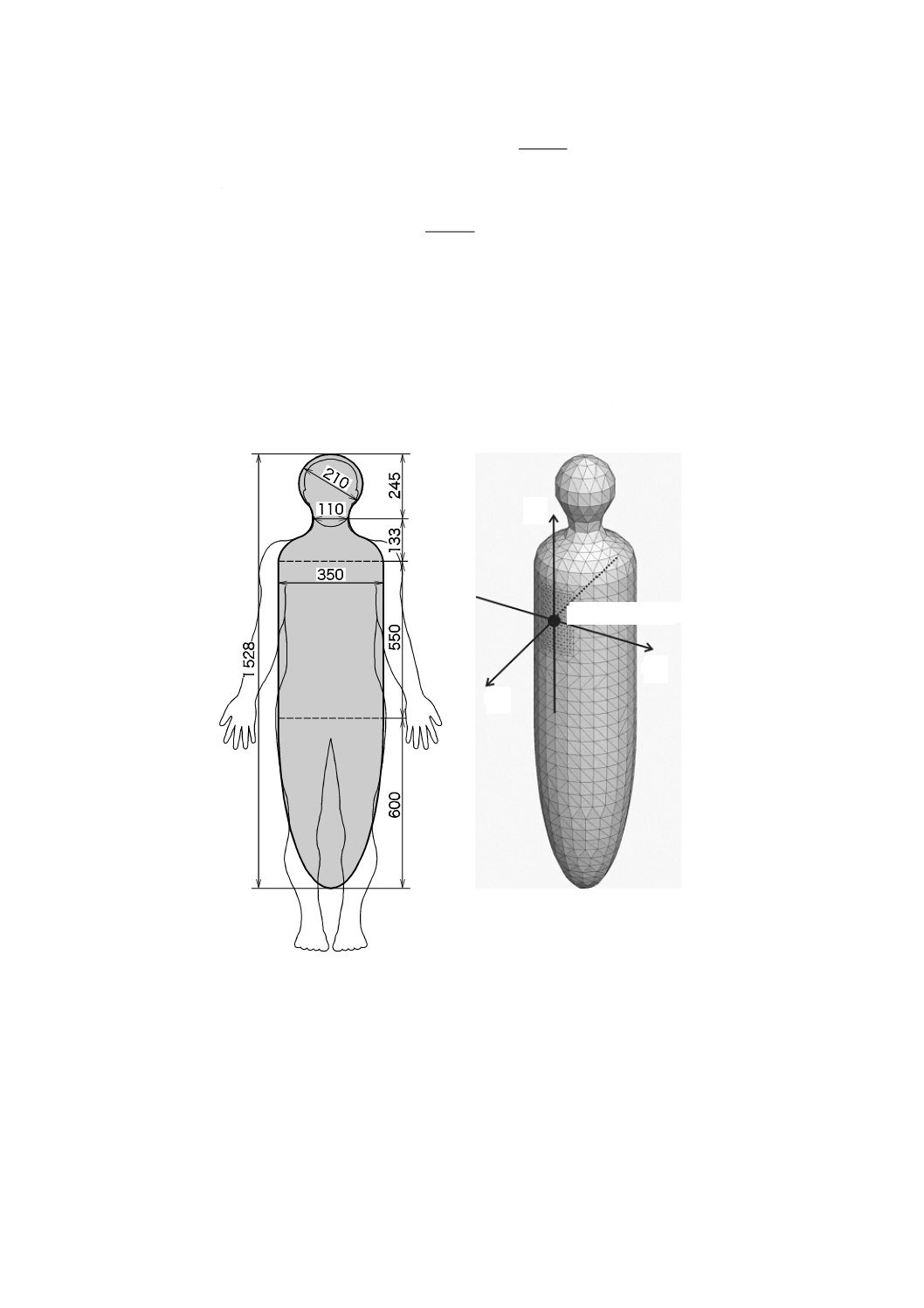
結合係数の計算に用いる均一な人体の数値モデルの寸法を,図D.3に示す。最下部は,回転だ円体の半
分であり,けい骨(すね)のところに下部の頂点があって,短軸及び長軸は,それぞれ350 mm,1 200 mm
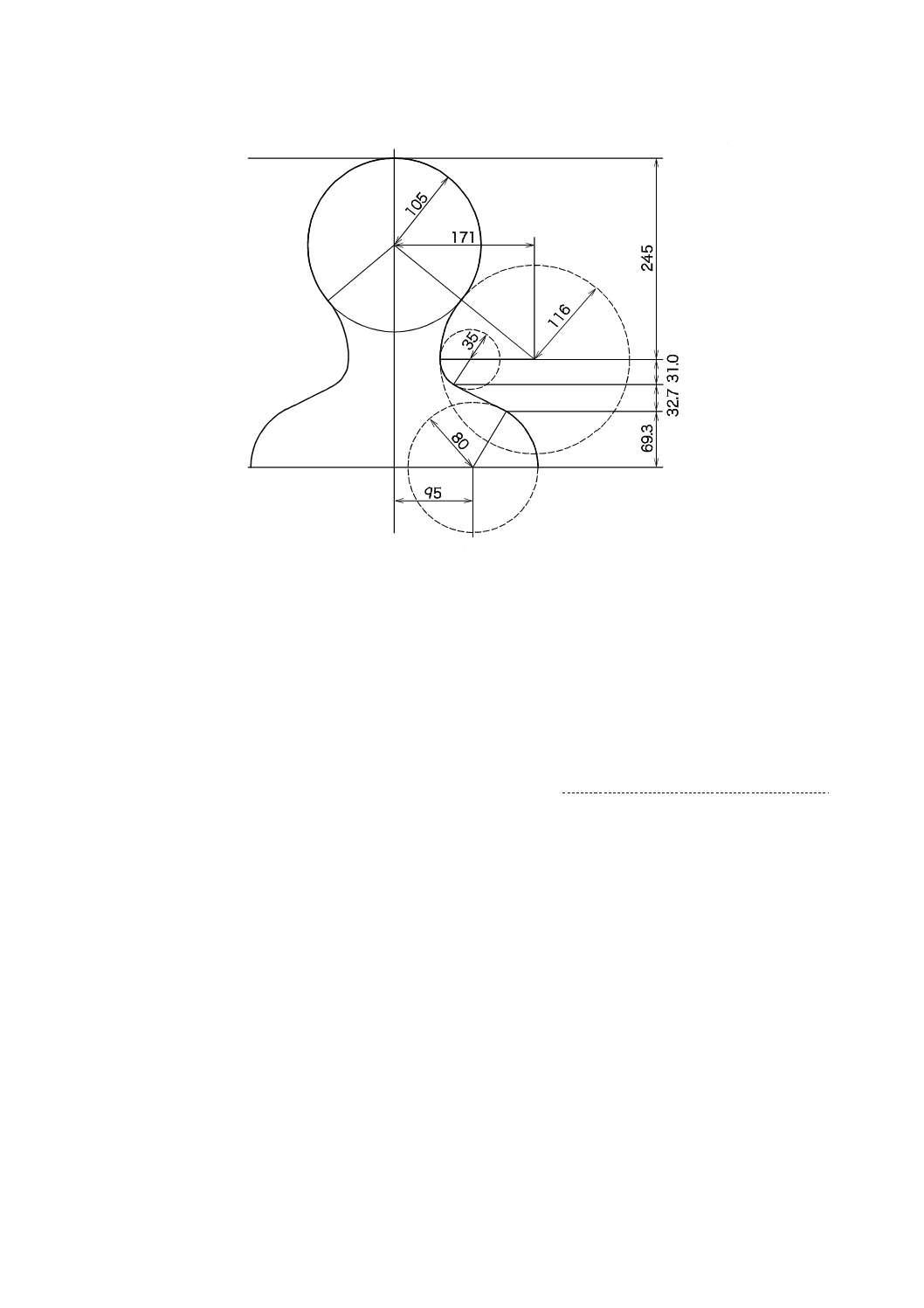
である。中央部は,直径350 mmの円筒とする。頭部及び肩についての詳細を,図D.4に示す。
単位 mm
図D.3−均一な人体の数値モデル
原点(0,0,0)
X
Y
Z
32
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
図D.4−頭部及び肩の形状の詳細
D.4.2 不均一な磁界の様々な磁界発生源及び係数kの計算
次に示す不均一な磁界発生源のリストは,全てを示しているものではなく,概要を示している。
・ 円形電流ループ
・ 方形電流ループ
・ 単線電流
・ 円形電流コイル
・ ダイポール
ただし,結合係数の計算には,磁界発生源として円形電流ループ(ほかの箇条では等価コイルと表現し
ている。)だけを用いている。したがって,径の異なる電流ループは,数値モデルに対して最悪状態(磁界
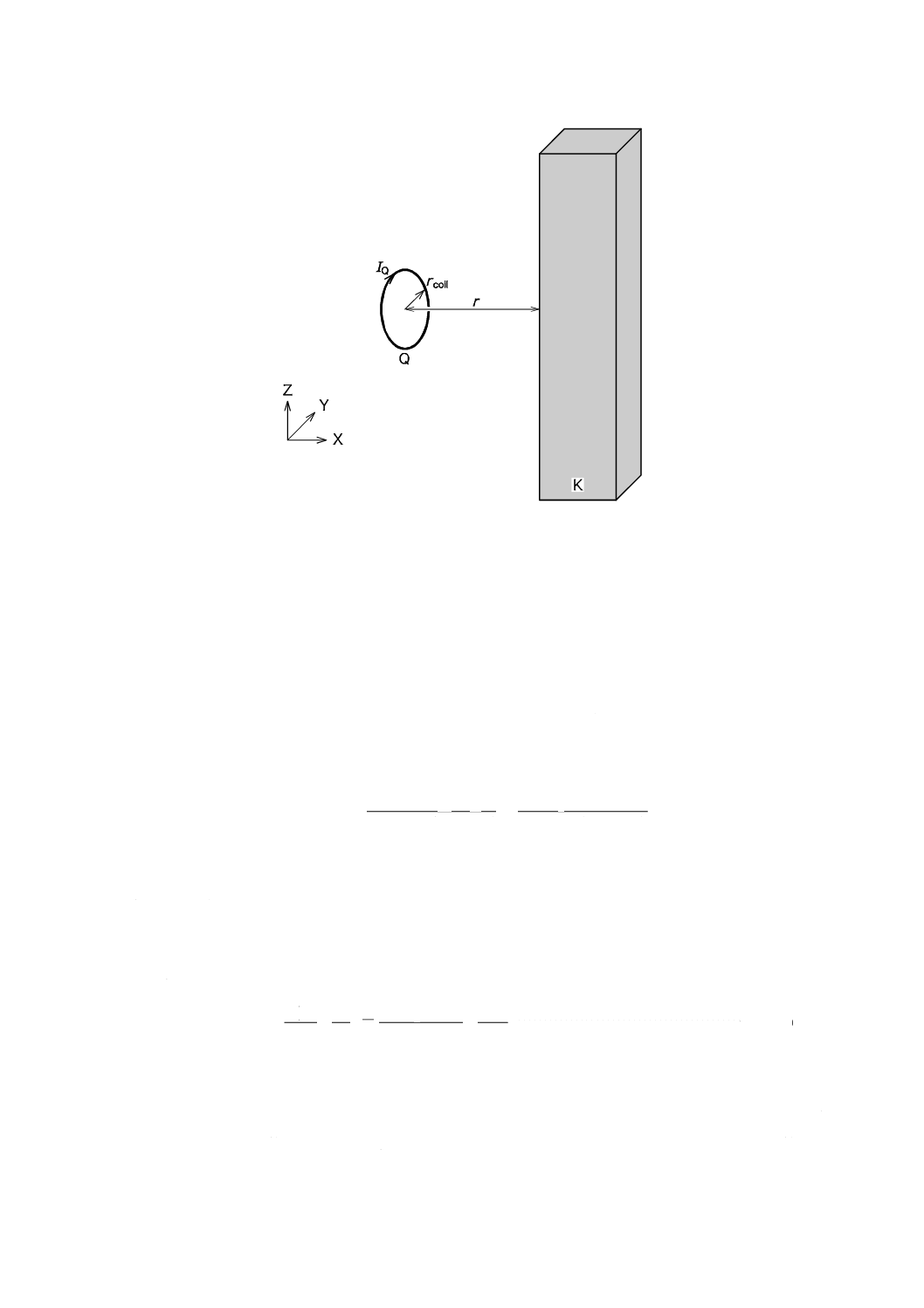
と人体との結合が最大となる。)となるように配置している。この最悪状態での磁界発生源QとモデルK
との位置関係を,図D.5に示す。
33
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図D.5−磁界発生源QのモデルKに対する位置関係
数値計算の場合は,周波数fに関して,人体組織の導電率σ(f)を考慮する。最後にオームの法則を当ては
めると,人体モデル内部の電流密度Jは,式(D.2)によって求めることができる。
J(r,f,σ)=σ(f) E1(r,f) ···························································· (D.2)
係数kは,数値モデル内部の最大誘導電流密度Jmax(r)と,モデルの同位置で測定した最大磁束密度
Bmax,sensor(r)との関係を示す。磁界発生源としての電流IQは任意のものを選択してよいが,Jmax及びBmax,sensor
の計算のときと同じものであることが望ましい。したがって,係数kの決定は,用いるセンサに依存する。
任意のセンサ面積Asensorについては,その面積全体の平均磁束密度を計算し,最大磁束密度Bmax,sensorとす
る。周波数f及び導電率σは,係数kに線形の関係があるので,式(D.3)によって係数kを求めることがで
きる。
k(r,f,σ)=
)
(
)
(
)
(
)
(
sensor
sensor
max
max
i
sensor
sensor
max
max
A
r
B
f
r
E
A
r
B
f
r
J
,
,
=
,
,
,
,
,
,
σ
σ
···················· (D.3)
均一な磁界では,胴体モデルの導電率を均一としてσ=0.2 S/mとすればよい。ただし,機器近くの磁界
分布に強い不均一性がある場合,胴体への浸透はごく僅かであるので,σ=0.1 S/mを用いることができる。
注記1 胴体表面近くの0.1 S/mの導電率の計算は,胴体導電率の混合体を用いている。
導電率σの詳細な値は,参考文献[9]から入手できる。
測定した磁束密度からIEEE規格の基本制限と比較するEiを計算するために必要となる係数は,式(D.4)
によって求める。
)
(
)
(
)
(
sensor
sensor
max
max
i
A
r
B
f
r
E
f
r
k
,
,
=
,
,
,
,
σ
σ
·············································· (D.4)
附属書Cの係数kを決定するときは,数値解析手法としてモーメント法(MoM)[5]を用いている。
例1 距離r=10 cmのときの半径rcoil=20 mm,電流IQ=100 Aの円形コイルの場合,結果は,胴体モ
デル(σ=0.1 S/m,f=50 Hz)で誘導電流密度Jmax=14.956 μA/m2となる。100 cm2センサの平均
磁束密度を計算した場合,
2
cm
100
sensor
max,
=
B
=5.468 35 μTとなる。したがって,係数kを計算した
場合,式(D.5)のようになる(表C.2のr=10 cmのときのrcoil=20 mmの係数k参照)。
34
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(
)
T
A/m
735
.2
T
35
468
5
m
A
956
14
S/m
1.0
Hz
50
cm
10
2
2=
,
,
μ
μ
=
=
=
=
.
.
f
r
k
σ
········ (D.5)
例2 距離r=10 cmのときの半径rcoil=20 mm,電流IQ=100 Aの円形コイルの場合,結果は,人体頭
部モデル(球半径rsphere=10.5 cm,σ=0.15 S/m,f=60 Hz)で,誘導電流密度Jmax=19.17 μA/m2
である。100 cm2センサの平均磁束密度を計算した場合,
2
cm
100
sensor
max,
=
B
=5.468 35 μTとなる。
したがって,係数kは,式(D.6)のようになる。
(
)
T
A/m
627
505
.3
T
35
468
5
m
A
17
.
19
S/m
15
.0
Hz
60
cm
10
2
2=
,
,
μ
μ
=
=
=
=
.
f
r
k
σ
及び
(
)
T
V/m
847
370
.
23
S/m
0
T
A/m
627
505
.3
S/m
15
.0
S/m
15
.0
Hz
60
cm
10
2
=
.15
=
=
=
=
=
σ
σ
,
,f
r
k
······ (D.6)
通常,数値計算の結果は,胴体モデルの電界の強さEiとなる(D.4.3参照)。誘導電界の大き
さEiの計算(IEEE規格で用いるような)は,係数kをkの計算に用いる導電率σで除すこと
で行うことができる。
したがって,誘導電界の大きさEi,maxは,式(D.7)のようになる。
(
)
)
cm
100
cm,
10
(
S/m
15
.0
S/m
15
.0
Hz
60
cm
10
2
sensor
sensor
max,
max
i
=
=
×
=
=
=
=
=
A
r
B
f
r
k
E,
,
,
σ
σ
=23.370 847T
V/m×5.468 35 μT=127.8 μV/m ································ (D.7)
注記2 限度値に関しての数値は,附属書Bに記載する。
D.4.3 誘導電流密度の計算
D.4.1及びD.4.2に記載するモデル及び手順に適したものである場合,どのような数値解析法及び計算ソ
フトウェアパッケージを用いてもよい。このような方法として一般に用いている方法には,次のようなも
のが挙げられる。
・ BEM(境界要素法)
・ FDFD(周波数領域有限差分法)
・ FDTD(時間領域有限差分法)
・ FEM(有限要素法)
・ FIT(有限積分法)
・ MoM(モーメント法)
・ SPFD(スカラポテンシャル有限差分法)
・ IM(インピーダンス法)
RF(無線周波)向けソフトウェアコードを用いる場合は,周波数換算(スケーリング)法[4]の利用が可
能である。どのような磁界発生源でも,より高い周波数f'(0.5 MHz以下に対して磁界の準定常的性質を
保証する。)で計算できる。この計算の場合,周波数f(f'ではない。)における組織の導電率を考慮する。
この計算で,周波数f 'における電界の強さE 'が得られる。ここで,周波数fに電界の強さEを式(D.8)によ
って換算(スケーリング)する。
35
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
'
'E
f
f
E
×
=
············································································ (D.8)
これによって,対象の周波数fでの値が決まる。最後に,式(D.9)のように,オームの法則を当てはめれ
ば,電流密度Jを計算できる。
E
f
J
×
=
)
(
σ
·········································································· (D.9)
36
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] RUOSS, H-O., SPREITZER, W., NISHIZAWA, S., MESSY, S. and KLAR, M. Efficient determination of
current densities induced in the human body from measured low frequency inhomogeneous magnetic fields.
Microwave and Optical Technology Letters, May 20, 2001, vol. 29, no. 4, pp. 211-213.
[2] NISHIZAWA, S., SPREITZER, W., RUOSS, H-O., LANDSTORFER, F. and HASHIMOTO, O. Equivalent
source model for electrical appliances emitting low frequency magnetic fields. Proceeding of 31th European
Microwave Conference 2001, September 2001,Vol.3, pp.117-120.
[3] KAMPET, U. and HILLER, W. Measurement of magnetic flux densities in the space around household
appliances. In: Proceedings of NIR 99, Nichtionisierende Strahlung, 31. Jahrestagung des Fachverbandes für
Strahlenschutz, Köln, 1999, vol. II, pp. 885-891.
[4] FURSE, CM and GANDHI, OP. Calculation of electric fields and currents induced in a millimeter-resolution
human model at 60Hz using the FDTD method. Bioelectromagnetics, 1998, vol. 19, pp. 293-299.
[5] JAKOBUS, U. Erweiterte Momentenmethode zur Behandlung kompliziert aufgebauter und elektrisch grosser
elektromagnetischer Streuprobleme. Fortschrittsberichte VDI, Reihe 21, Nr.171, 1995, VDI Verlag,
Duesseldorf.
[6] Programm EMPIRE, http://www.imst.de/
[7] SHEWCHUCK, JR. An introduction to the conjugate gradient method without the agonizing pain. School of
Computer Science, Carnegie Mellon University, Pittsburgh, 1994
[8] RUOß, H-O. and KAMPET, U. Numerical calculation of current densities induced in the human body caused by
low frequency inhomogeneous magnetic sources. Kleinheubacher Berichte 2001, Band 144, pp. 155-162.
[9] Italian National Research Council; Institute for Applied Physics: Calculation of the Dielectric Properties of
Body Tissues in the frequency range 10 Hz−100 GHz. Florence (Italy), 1997-2002;
http://sparc10.iroe.fi.cnr.it/tissprop/htmlclie/htmlclie.htm#atsftag
[10] FEKO: EM Software & System, www.feko.co.za
[11] ICNIRP. Guidelines for limiting exposure to time-varying electric, magnetic and electromagnetic fields (up to
300 GHz). Health Phys., 1998, vol. 41, no. 4, pp. 449-522
[12] IEEE C95.6:2002, IEEE Standard for Safety Levels With Respect to Human Exposure to Electromagnetic
Fields, 0 - 3 kHz
[13] BIPM, IEC, IFCC, ISO, IUPAC, IUPAP and OIML:1995, Guide to the Expression of Uncertainty in
Measurement, ISBN 92-67-10188-9.
[14] NIS 81, The Treatment of Uncertainty in EMC Measurements. United Kingdom Accreditation Service,
Teddington, Middlesex, UK, Ed. 1, 1994
[15] ORCUTT, Neil and GANDHI, OM P. A 3-D Impedance Method to Calculate Power Deposition in Biological
Bodies Subjected to Time Varying Magnetic Fields. IEEE Transactions on Biomedical Engineering, August
1988, Vol. 35, No. 8.
[16] GANDHI, OM P., DEFORD, John F. and KANAI, Hiroshi. Impedance Method for Calculation of Power
Deposition Patterns in Magnetically induced Hyperthermia. IEEE Transactions on Biomedical Engineering,
October 1984, Vol. BME 31, No. 10.
37
C 1912:2014 (IEC 62233:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
[17] DAWSON, T. W., CAPUTA, K. and STUCHLY, M. A. Numerical evaluation of 60 Hz magnetic induction in
the human body in complex occupational environments. Physics in Medicine & Biology, April 1999, Vol. 44 (4),
pp. 1025-1040.
[18] NISHIZAWA, Shinichiro, LANDSTORFER, Friedrich (University of Stuttgart, Germany) and HASHIMOTO,
Osamu (Aoyama Gakuin University, Japan). Study of the magnetic field properties around household appliances
using magnetic source models as prescribed by the CENELEC standard EN50366. Submitted in IEIEC Tokyo
Japan.
[19] NISHIZAWA, S., RUOSS, H‒O., LANDSTORFER, F. and HASHIMOTO, O. Numerical study on an
equivalent source model for inhomogeneous magnetic field dosimetry in the low-frequency range. IEEE
Transaction on Biomedical Engineering, Vol. 51, No. 4, April 2004.
[20] NISHIZAWA, Shinichiro, LANDSTORFER, Friedrich, and HASHIMOTO, Osamu Dosimetric study of
induction heater using the coil source model prescribed by the EN50366. Proceeding of 3rd International
Workshop on Biological Effects of Electromagnetic Fields, Volume 2, (October 2004), pp.894-903.
[21] IEEE C95.1:1999,IEEE Standard for Safety Levels with Respect to Human Exposure to Radio Frequency
Electromagnetic Fields, 3 kHz to 300 GHz
[22] IEC 62226-1,Exposure to electric or magnetic fields in the low and intermediate frequency range−Methods
for calculating the current density and internal electric field induced in the human body−Part 1: General
[23] IEC 62226-2-1,Exposure to electric or magnetic fields in the low and intermediate frequency range−Methods
for calculating the current density and internal electric field induced in the human body−Part 2-1: Exposure to
magnetic fields−2D models
[24] Guidance on Determining Compliance of Exposure to Pulsed Fields and Complex Non Sinusoidal Waveforms
below 100 kHz with ICNIRP Guidelines. Health Physics 84 (3): 383-387; 2003.
[25] JIS C 61000-3-2 電磁両立性−第3-2 部:限度値−高調波電流発生限度値(1相当たりの入力電流が
20 A以下の機器)
[26] ICNIRP. Guidelines for limiting exposure to time-varying electric, magnetic and electromagnetic fields (1
Hz-100 kHz) published in health phys 99(6):818-836;2010