2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 1803-1995
工業プロセス計測制御機器の
性能表示法通則
General rules for defining expression of the performance of
industrial-process measurement and control equipment
1. 適用範囲 この規格は,工業プロセス計測制御機器全般にわたる基本的な性能の表し方について規定
する。ただし,特定の機器について,その性能の表し方を定めた規格がある場合は,その規格による。
備考 この規格の引用規格を,次に示す。
JIS B 0155 工業プロセス計測制御用語
JIS C 1002 電子測定器用語
JIS C 1804 工業プロセス計測制御機器の使用環境条件
JIS Z 8103 計測用語
2. 用語の定義 この規格で用いる主な用語の定義は,JIS B 0155,JIS C 1002及びJIS Z 8103によるほ
か,次のとおりとする。
(1) 定格性能 製造業者が個別の機器について保証する性能。カタログ,仕様書などに表示する。
(2) 個別性能 個別の機器について実際に試験を行って得た性能。個々の機器の成績書などに表示する。
(3) 形式試験 定格性能全般の確認を目的として行う試験。
なお,試作品及び量産品について製造業者が行う性能全般の確認及び使用者が行う定格
性能の確認のために行う試験は,通常,形式試験を適用する。
(4) 個別試験 個別性能を確認する目的で行う試験で,通常,個別性能を表す全項目の一部について試験
する。
なお,製造業者の出荷試験及び使用者の立会試験には,通常,個別試験を適用する。
3. 性能の区分
3.1
基準性能 基準性能は,機器の性能評価を行うときの基準となる値を表すものとする。その主な基
準動作条件における性能は,次のとおり。
(1) 誤差に関するもの 精度定格,最大誤差,ヒステリシス差,直線性又は一致性,不感帯など
(2) 動特性に関するもの 時定数,むだ時間,整定時間,応答時間,行過ぎ量など
(3) 安定性に関するもの ドリフト,ウォームアップ時間など
(4) その他 耐電圧,絶縁抵抗,消費電力など
3.2
影響変動 影響変動は,外部影響量の変化に基づく機器の誤差で,基準性能に含まれる誤差に対す
る付加誤差の大きさをいう。機器に影響変動をもたらす主な外部影響量には,次のものがある。
2
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(1) 環境条件に関するもの 温度,湿度,振動,衝撃,磁界など
(2) 据付条件に関するもの 取付角度など
(3) 動力源及び入出力条件に関するもの 電源電圧,電源周波数,電源瞬断,過大入力,コモンモード電
圧,信号源インピーダンスなど
4. 動作条件
備考1. 基準性能及び影響変動は,それぞれ4.1及び4.2に基づいて表示する。
2. 基準動作条件及び正常動作条件のほかに,機器が永久的損傷を受けることなく,一時的に耐
えることが要求される条件として,動作限界の範囲と輸送保管条件とがあるが,通常,これ
らの条件下での性能は規定しない。
4.1
基準動作条件 基準動作条件は,自然環境又は人工的環境の基準を示す値,及びそれらが変動して
も機器の基準性能に影響を与えないと考えられる外部影響量の許容範囲をいう。
備考 外部影響量の許容される変化の範囲は,それがもたらす機器の誤差が基準動作条件のもとで運
転される際に生じる誤差の10%以下になる値を限度とする。
基準動作条件を構成する環境の基準及び外部影響量の値は,次のとおりとする。
(1) 標準大気 温度 23℃
温度許容差
±2℃
温度変化率
±5℃/h
湿度
50%RH
湿度許容差
±10%RH
気圧
86〜106kPa
(2) 磁界 地磁気
(3) 電源電圧 交流電源,直流電源共に基準値±1%
(4) その他 いずれも影響変動が無視できる外部影響量の値又は範囲で,必要に応じて基準動作条件の値
として明示する。
4.2
正常動作条件 正常動作条件は,機器の正常な動作が保証される外部影響量の範囲で,影響変動は
その範囲内における単独の外部影響量の変化に対して規定される。
備考 個別の機器に対する正常動作条件は,原則としてJIS C 1804に規定する使用環境条件に関する
クラスの中から選択する。
5. 性能の表示
5.1
性能表示の区分 機器の性能は,定格性能,個別性能,いずれの場合にも,基準性能及び影響変動
の値で表示する。
5.2
基準性能の表示
5.2.1
一般事項 一般事項は,次による。
(1) 誤差に関する基準性能の各項目は,基準動作条件における出力の誤差によって表示する。
ここでいう“出力”とは,機器の入力に対応する指示値,記録値,設定値,変換値,演算値などの
すべてを含む。
また,出力の誤差とは,出力の基準値からの偏差で,一般に正の値と負の値がある。次の表示法に
おける±の符号は誤差が正負両方の場合と正又は負の場合を示し,+又は−の符号は正又は負である
3
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ことが明確な場合を示す。基準性能が出力の変化幅として定義されているもの(例えば,ヒステリシ
ス差)については符号を付けない。
なお,個別性能を基準性能で表示する場合の出力の誤差は,“測定された最大誤差”を,また,定格
性能の場合は“保証する最大誤差の限界”を意味する。
(2) 誤差に関する基準性能は,特に指定がない限り,出力スパンの百分率又は測定値の単位(℃,Paなど)
を付して表示する。
なお,出力がディジタル表示される場合には,通常,分解能に起因する固有の誤差“±1ディジッ
ト”が本来の出力誤差に付加される。その場合は,次のように表示する。
精度定格 ±[( )%+1ディジット]
例
±(0.5%+1ディジット)
5.2.2
基準性能の表示法 基準性能の表示法は,次による。
(1) 精度定格:
±( )%
±( )℃
読みの値の±( )%
精度定格は,形式仕様における定格性能を表す場合にだけ用いる。
上記の表示法の例を次に示す。
例1. ±0.1%
例2. ±0.5℃
例3. 読みの値の±1%
備考 ± ( ) %は全スパンの百分率を表すが,全スパンであることを明確にするために± ( ) %FS
と記す場合がある(FSはFull spanの略である。)。
(2) 最大誤差:
+( )%,−( )%
+( )℃,−( )℃
読みの値の+( )%,−( )%
最大誤差は,個別性能を表す場合にだけ用いる(表1校正表の例参照)。
4
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
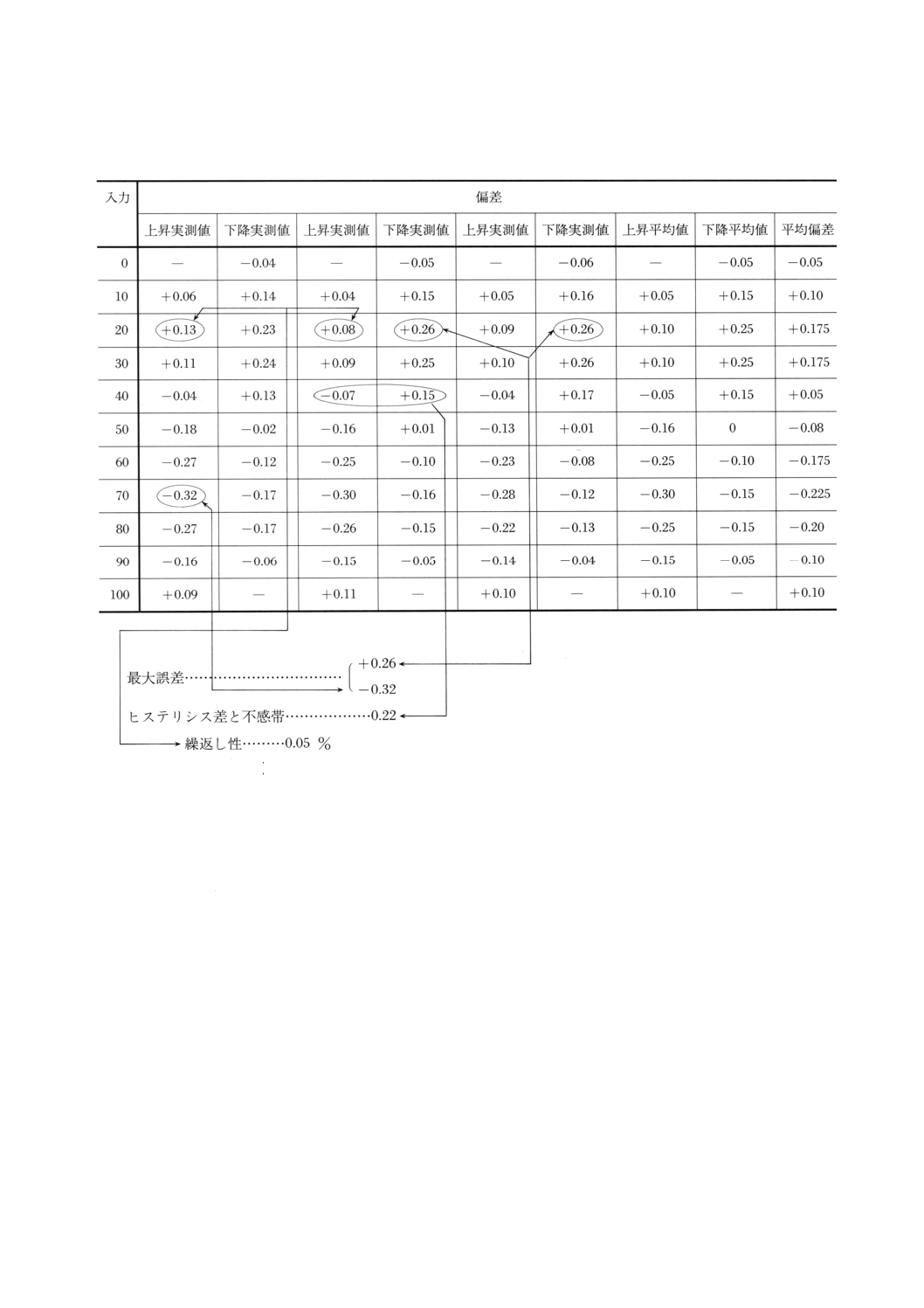
表1 校正表の例(図1参照)
単位 %
(3) ヒステリシス差: ( ) %(表1校正表の例参照) ヒステリシス差は,単にヒステリシスともいい,
0と100%を含む入力の上昇・下降の1往復によって得られる入出力特性曲線(ヒステリシス・ループ)
において,同一入力に対する二つの出力間の差の最大値をいう。不感帯をもつ機器の場合,ヒステリ
シス差は不感帯を含む。
(4) 直線性又は一致性:±( )%
両端基準直線性又は一致性:+( )%又は−( )%
ゼロ基準直線性又は一致性:±( )%
直線性又は一致性は,校正曲線を規定特性曲線によって近似したときに得られる偏差の最大値をも
って表し,近似の方法によって上記の三通りが得られる(図1校正曲線の例参照)。
5
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
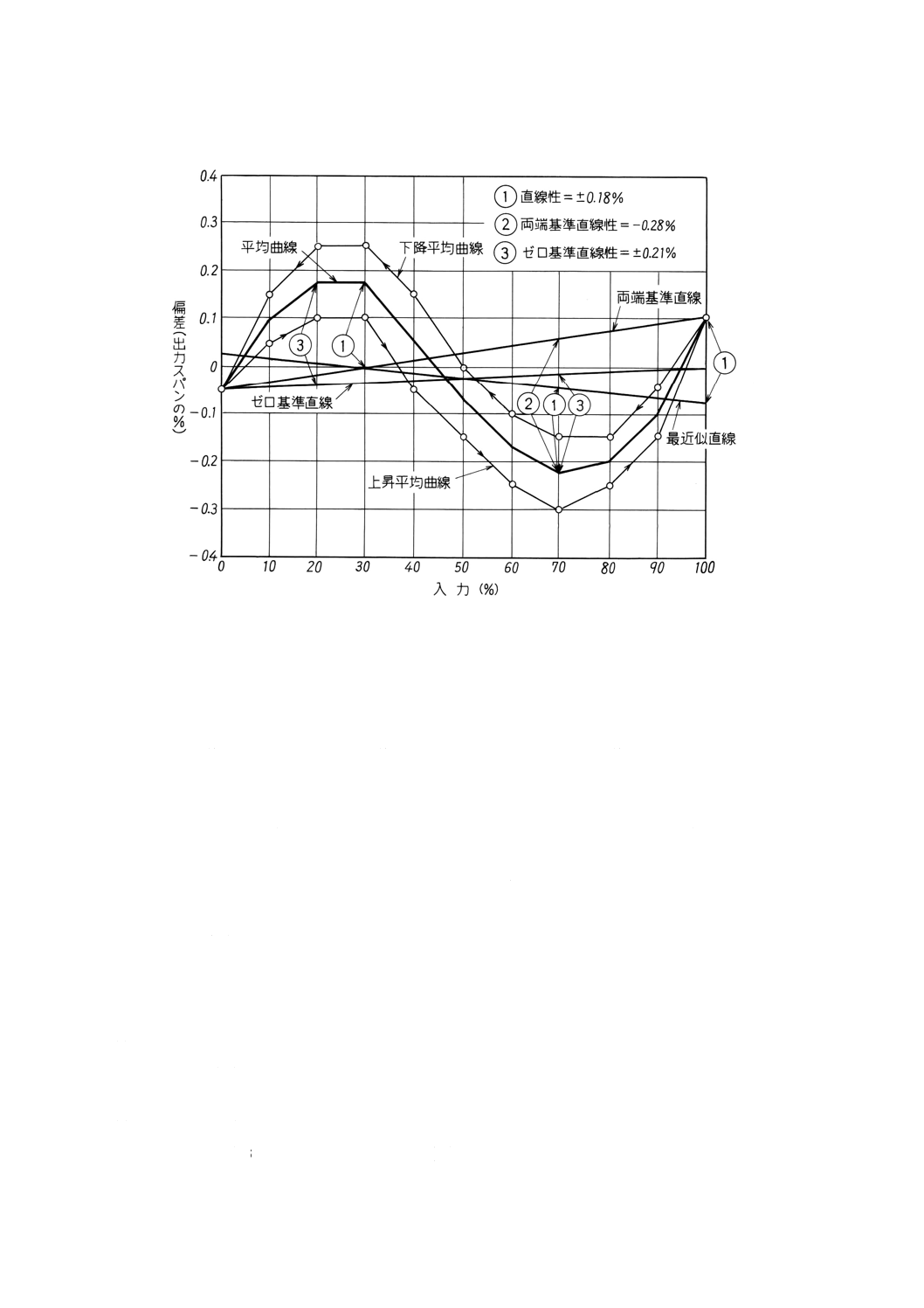
図1 校正曲線の例(表1参照)
備考1. “規定特性曲線”とは,機器の基準となる入出力特性をいう。入出力特性が直線で表される
場合,規定特性曲線(直線)からの偏差を直線性といい,入出力特性が非線形の場合,規定
特性曲線(曲線)からの偏差を一致性という。
“校正曲線”とは,複数回の入力の上昇・下降によって得られる入出力特性曲線から上昇
平均曲線と下降平均曲線を求め,さらに両者を平均して求めた曲線をいう。
2. 直線性又は一致性 独立直線性又は一致性ともいい,校正曲線の正負の偏差が共に最小にな
るように規定特性曲線の位置を調整することによって得られる最大偏差。
3. 両端基準直線性又は一致性 規定特性曲線の上限値と下限値を校正曲線の上限値と下限値に
それぞれ一致させることによって得られる最大偏差(最大偏差は正又は負の値)。
4. ゼロ基準直線性又は一致性 規定特性曲線の下限値を校正曲線の下限値に一致させ,正負の
偏差の最大値が等しくなるように規定特性曲線の位置を調整することによって得られる最大
偏差。
(5) 繰返し性: ( ) % 繰返し性は,入力レンジの全範囲にわたって入力を複数回上昇・下降させたとき,
同一方向からの同一入力に対して生じる出力間の差の最大値で表す(表1校正表の例参照)。
(6) 不感帯: ( ) % 不感帯は,出力に変化を与えることのない入力の微小変化量の最大値を表す。
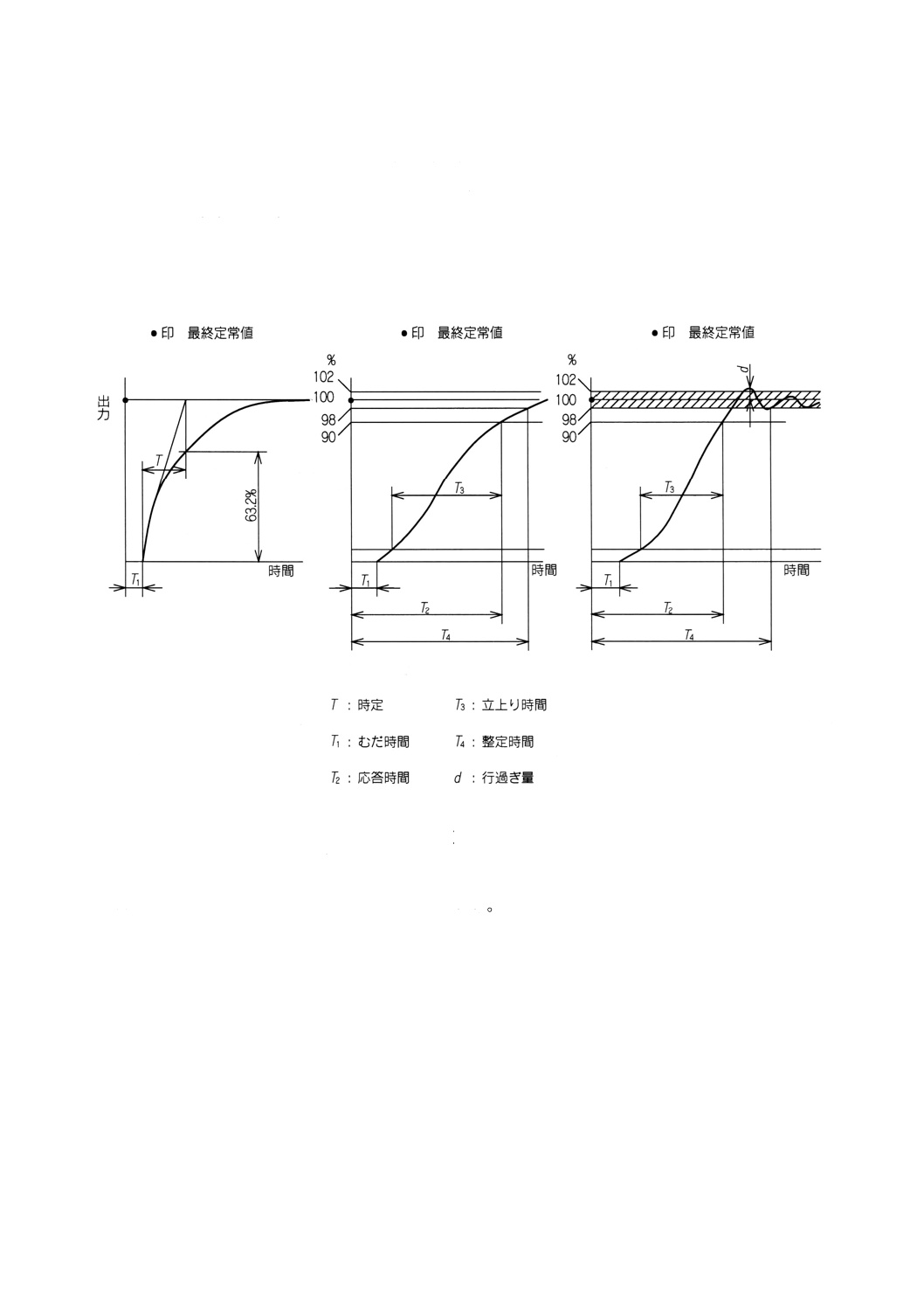
(7) ステップ応答:
(a) 整定時間 ( ) s[ステップ入力 ( ) 〜 ( ) %,最終値の ( ) %]
(b) 時定数 ( ) s
(c) 応答時間 ( ) s[最終値に対し ( ) %]
(d) むだ時間 ( ) s
(e) 行過ぎ量 ( ) %[ステップ入力 ( ) 〜 ( ) %]
6
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ステップ応答は,通常,ステップ入力に対する出力の過渡的な変化を連続的にとらえ,必要に応じ
て,上記の(a)〜(e)をもって表示する(図2参照)。
なお,図2の例において“最終値の ( ) %”の ( ) 内の値は2であり,応答時間を決める“最終
値に対し ( ) %”の ( ) 内の値は90である。図はいずれも“ステップ入力0〜100%”の例であるが,
整定時間と応答時間を求める変動中の出力の終点は,ステップ入力幅と関係なく出カスパンの百分率
を尺度として表す。
図2 ステップ応答の例
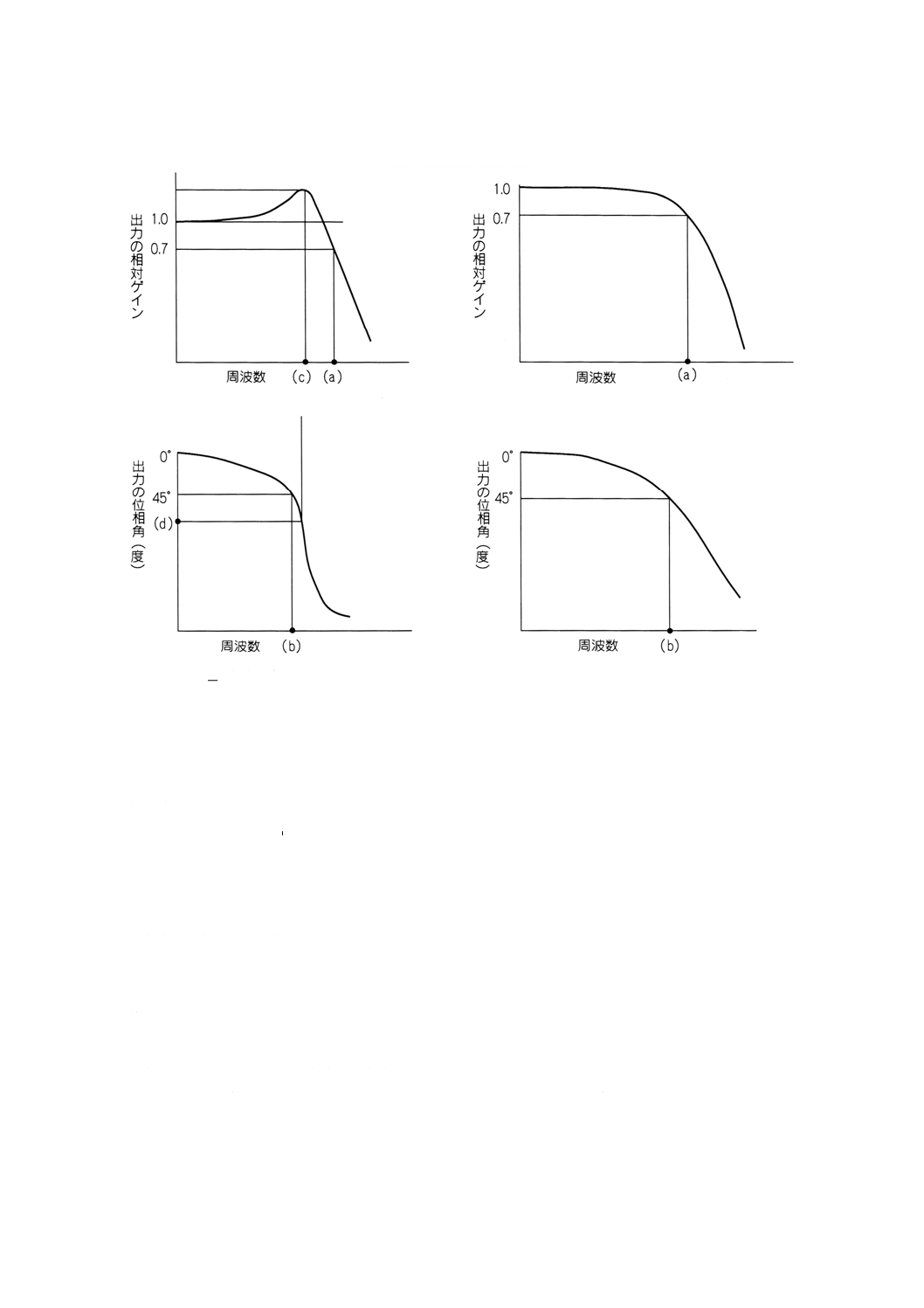
(8) 周波数応答:
(a) 相対ゲインが0.7になる周波数 ( ) Hz
(b) 位相遅れが45°になる周波数 ( ) Hz
(c) 相対ゲインが最大になる周波数 ( ) Hz
(d) 相対ゲインが最大になる出力の位相角 ( ) °
周波数応答は,周波数をパラメータとして定振幅の正弦波入力に対する出力の振幅を連続的にとら
え,必要に応じて,上記(a)〜(d)をもって表示する(図3周波数応答の例参照)。
7
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 周波数応答の例
(9) ドリフト:± ( ) %/ ( ) h ドリフトは,長時間入力を一定値に保持したときに生じる出力の変化を
いい,所定の経過時間内に生じる出力の最大変化量で表示する。通常,試験においては出力を長時間
連続記録する。その間,基準動作条件を維持することが困難な場合は,正常動作条件内に維持するも
のとする。
(10) ウォームアップ時間: ( ) min 出力の値によってウォームアップ時間が異なる場合は出力の値を
( ) 付きで示す。
( ) min[出力 ( ) %]
(11) 消費電力:
( ) W [ ( ) V DC]
( ) VA [ ( ) V AC, ( ) Hz]
( ) W [ ( ) V AC, ( ) Hz]
消費電力は,通常,最大消費電力を表示するものとし,[ ] 内には消費電力を規定する条件を示す。
なお, ( ) V ACは交流実効値を意味する。
(12) 絶縁抵抗:
( ) MΩ [ ( ) V DC]
( ) MΩ[ ( ) VDC, ( ) − ( ) 間]
[ ] 内には絶縁抵抗を規定する電圧とともに,必要に応じて,対象部位を明記する。
なお,絶縁抵抗は特に温度と湿度の影響を受けやすいので,基準動作条件以外の温度及び湿度で規
定する場合は,温度と湿度についての条件を次の例のように明記する。
8
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例 50MΩ(500V DC,35℃,70%RH,入力端子−出力端子間)
(13) 耐電圧:
( ) kV, ( ) Hz, ( ) min
( ) kV, ( ) Hz, ( ) min[ ( ) − ( ) 間]
耐電圧は,通常,商用電源周波数の交流実効値電圧で表示する。
交流電圧の実効値であることを明確にするために,次の具体例のように ( ) kV AC又は ( ) kV
rmsと記す場合がある。
また,必要に応じて,( ) 内に対象部位を表示する。
0.5kV AC, 50Hz, 1min(入力端子−接地端子間)
1kV rms, 50Hz, 1min(出力端子−接地端子間)
なお,附帯条件として試験装置の遮断電流を明らかにする必要がある場合は,次の例のように表示
する。
例 0.5 kV AC, 50 Hz, 1 min(遮断電流0.5 mA)
(14) 空気消費量: ( ) m3/h[供給圧 ( ) kPa] 出力の値によって空気消費量に差がある場合は,[ ]
内に出力の値を明記する。
( ) m3/h[供給圧 ( ) kPa,出力 ( ) %]
5.3
影響変動の表示
5.3.1
一般事項 一般事項は,次による。
(1) 影響変動の各項目は,一つの外部影響量だけが正常動作条件の範囲内で変化したときに生じる出力の
最大変化量で表示する。ただし,他の外部影響量は基準動作条件に保持されているものとする。
2種以上の外部影響量による複合影響を表示する必要がある場合は,それらの条件を明示する。
(2) 影響変動は,原則として“レンジの下限値”の変化量と“スパン”の変化量とによって表示し,とも
に出力スパンの百分率又は測定値に単位(℃,Paなど)を付けて表す。
一般に,レンジの下限値の変化を“ゼロシフト”,スパンの変化量を“スパンシフト”といい,外部
影響量の種類ごとに次の例のように表示する。
なお,影響変動の“変動”は,通常,省略される。
例 温度の影響 ゼロシフト ±0.01%/℃
スパンシフト ±0.02%/℃
出力レンジの中間の値におけるシフトがゼロシフト又はスパンシフトを超える場合には,“最大シ
フト”として,そのシフトが測定された出力レンジの値とともに次の例のように付記する。
例 ゼロシフト ±0.02%/℃
スパンシフト ±0.01%/℃
最大シフト ±0.03%/℃(出力75%)
また,正常動作条件としての外部影響量の変化範囲は,必要に応じて,影響変動の値の後に ( )
を付けて次の例のように表示する。
例 温度の影響 ±0.01%/℃ (−30〜+80℃)
なお,ゼロシフトとスパンシフトは同一の表示であるため,以下の影響変動の表示法では区別を省
略する。
5.3.2
影響変動の表示法 影響変動の表示法は,次による。
(1) 温度の影響:
9
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
± ( ) %/℃ [( ) 〜 ( ) ℃]
± ( ) %/± ( ) ℃[(基準温度)+ ( ) ℃,− ( ) ℃]
例としては,次のように表示する。
例1. ±0.01%/℃ (5〜40℃)
例2. ±0.05%/±18℃ (23+18℃,−18℃)
(2) 湿度の影響:
± ( ) %/%RH [( ) 〜 ( ) %RH]
± ( ) %/± ( ) %RH[(基準湿度)+ ( ) %RH, − ( ) %RH]
備考 “自然環境条件”としての湿度は,温度と密接に関係している。例えば,正常動作条件が屋外
のある温度・湿度クラスの場合,個々にみれば湿度範囲5〜95%RH,温度範囲5〜40℃であっ
ても,湿度5 %RHにおける温度の下限値は25℃,湿度95%RHにおける温度の上限値は30℃
となるので,湿度を基準にした場合の“現実の使用環境条件”は次のようにする。
5%RH (25〜40℃) 〜95%RH (5〜30℃)
したがって,この場合の湿度を基準とした温度との複合影響は,次のように表示される。
±0.5%/5%RH (25℃) 〜95%RH (30℃)
(3) 電源電圧の影響:
± ( ) %/V [( ) 〜 ( ) V]
± ( ) %/± ( ) V[(基準電圧)+ ( ) V,− ( ) V]
± ( ) %/± ( ) %[基準電圧)+ ( ) %,− ( ) %]
(4) 電源周波数の影響:
± ( ) %/Hz [( ) 〜 ( ) Hz]
± ( ) %/± ( ) Hz[(基準周波数)+ ( ) Hz,− ( ) Hz]
± ( ) %/± ( ) Hz[(基準周波数)+ ( ) %,− ( ) %]
(5) 電源ひずみ率の影響:± ( ) %/(電源ひずみ率の値)% 電源ひずみ率の影響は,交流電源電圧の波
形が正弦波から崩れることによって生じる出力の変化をもって表示する。
備考 電源ひずみ率は,“電源電圧の実効値とその中に含まれる高調波群の実効値の比”として定義さ
れている。
(6) 電源瞬断の影響:± ( ) % ( ) ms 電源瞬断の影響は,電源が短時間切れることによって生じる出
力の過渡的変化をもって表示する。出力の過渡的変化は,変化量の正又は負の最大値と変化の持続時
間(出力の変化が定常値の99%に達するまでの時間)で表示する。
なお,出力の値によって影響変動に差異が存在する場合は,次の例のように出力の値を表示する。
例 −1.0%(瞬断時間20ms,出力50%)
また,出力に定常的な変化を生じる場合には,次のように付記する。
過渡変化 −1.0% (瞬断時間 20ms)
定常変化 +0.2%
備考1. 電源瞬断の影響は,バックアップ電源への切換えを考慮したものである。
2. 試験に当たっては,通常,入力を50%に保持し,被試験機器の出力と電源入力を2チャネル
記録計によって同時記録する。
交流電源の場合は,電圧がゼロになる瞬間(正弦波の位相がゼロになる“クロスオーバー
ポイント”)において電源をスイッチングし,3回の瞬断試験を行う。電源切換え時の位相制
10
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
御が不可能な場合は,ランダムに少なくとも10回の瞬断試験を行う。いずれの場合も,各瞬
断試験の間隔は瞬断時間の10倍以上とする。
(7) 供給空気圧の影響:
± ( ) %/± ( ) kPa [( ) 〜 ( ) kPa]
± ( ) %/± ( ) kPa[(基準供給圧)+ ( ) kPa,− ( ) kPa]
なお,出力の値によって影響変動に差がある場合は,次の例のように出力の値を明記する。
例 ±0.5%/±10kPa(140+10kPa,−10kPa,出力100%)
(8) 振動の影響:
± ( ) %[振幅 ( ) mm,周波数 ( ) 〜 ( ) Hz]
± ( ) %[加速度 ( ) m/s2,周波数 ( ) 〜 ( ) Hz]
正常動作条件における振動は,通常,一定の振幅(全振幅の21)と周波数範囲,又は一定の加速度
と周波数範囲によって規定されるが,定の振幅と一定の加速度の範囲をもって規定する場合もある。
そのような場合には,次のように表示する。
(振幅0.75mm,周波数2〜9Hz,加速度2m/s2,周波数9〜60Hz)
一般に,振動の影響は加振方向によって異なるので,必要に応じて,次の例のように加振方向も表
示する。
例 ±0.5%(加速度2m/s2,周波数9〜60Hz,x軸方向)
通常,左右,前後,上下の3方向をそれぞれx軸,y軸,z軸とする。
(9) 衝撃の影響:
± ( ) %[自由落下 ( ) mm]
± ( ) %[加速度 ( ) m/s2,衝撃時間 ( ) ms]
自由落下による場合は,コンクリートの床,又は十分大きな質量をもつ金属板の上へ被試験機器を
所定の高さ (25〜100mm) から落下させる。原則として衝撃は非通電状態で加える。
備考 被試験機器が比較的大きな重量物の場合は,被試験機器の底面(一般に四角形)の一辺を軸と
して反対側の辺を床から所定の高さ (25〜100mm) に持ち上げるか,又は角度にして30°傾け
た位置からの自由落下による衝撃を加える。試験としては,各辺を軸にしてそれぞれ1回の衝
撃を加える。
衝撃を加速度と衝撃時間(持続時間)によって規定する場合は,必要に応じて,衝撃を加える方向
として左右,前後,上下(x軸,y軸,z軸)を明記する。その例を,次に示す。
例1. ± 0.5%(加速度20m/s2,衝撃時間10ms,x,y,z軸)
例2. ± 0.3%(加速度40m/s2,衝撃時間10ms,x,y軸)
例3. ± 0.2%(加速度40m/s2,衝撃時間10ms,z軸)
備考 衝撃試験機は,通常,正弦波の半サイクルに相当する衝撃(加速度)を発生する。
(10) 取付角度の影響:±( )% [±( )°] 取付角度は,通常,前後・左右の2方向について水平面
からの傾きが規定されるので,方向によって影響変動が異なる場合は次の例のように表示する。
例 ± 0.3%(前後±30°),± 0.5%(左右±30°)
備考 取付角度は,設置角度,据付角度などともいう。
(11) 過大入力の影響:±( )%[入力スパンの ( ) 倍の入力 ( ) s] 過大入力による影響変動は,あ
る大きさの過大入力が一定時間加えられたことによって生じる定常的な出力の変化として表示する。
備考 通常の試験においては,許容過大入力を1分間加えた後,入力をレンジの下限値に戻す。その
11
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
状態で5分間経過した後,ゼロシフトとスパンシフトを測定する。
(12) 信号源インピーダンスの影響及び負荷インピーダンスの影響:± ( ) % [( ) 〜 ( ) Ω] 両影響変
動は,インピーダンスが許容範囲内で変化することによって生じる出力の最大変化をもって表し,次
の例のように表示する。
例 負荷インピーダンスの影響 ±0.5% (0〜600Ω)
(13) 接地の影響:
± ( ) %(入力接地)
± ( ) %(出力接地)
接地による影響変動は,大地から絶縁されている入力回路又は出力回路を接地することによって生
じる定常的な出力の変化を表示する。
一般に,機器の金属容器は保安接地されるので,入力回路又は出力回路が機器の容器から絶縁され
ている場合,入力端子又は出力端子と機器の接地端子との間を短絡することによって影響変動が現れ
る。
また,入力又は出力の値によって影響変動に差がある場合は,次の例のように入力又は出力の値を
明記する。
例 ±0.2%(入力接地,出力50%)
(14) 外部磁界の影響:
± ( ) %[直流磁界 ( ) A/m]
± ( ) % [( ) A/m, ( ) Hz]
磁界の方向によって影響変動が異なる場合は,左右,前後,上下の方向をそれぞれx軸,y軸,z
軸として次の例のように表示する。
例1. ±0.4%(400A/m,50Hz,x,y,z軸方向)
例2. ±0.2%(400A/m,50Hz,x,z軸方向)
例3. ±0.5%(400A/m,50Hz,y軸方向)
(15) 静電気放電の影響:± ( ) % [ ( ) kV] 静電気放電の影響は,外部の静電気が機器に放電すること
によって生じる出力の過渡変化をもって表示するものとし,“接触放電”と“気中放電”(被試験機器
の表面塗装が試験電圧以上の絶縁耐圧をもつ場合)の区別を明らかにする場合は,次の例のように表
示する。
例 ± 0.3%(15kV 気中放電)
備考 静電気放電試験は静電気放電試験装置を用い,原則として10回被試験機器の金属容器に対して
放電を行う。
また,放電電圧はJIS C 1804の規定によって定められた静電気放電電圧のクラスの厳しさレ
ベルの中から選択する。
参考 試験装置及び試験方法の詳細は,社団法人日本電気計測器工業会規格JEMIS 036-1994(計測制
御機器イミュニティ試験法)に規定されている。
(16) 放射電磁界の影響:± ( ) % [ ( ) V/m] 放射電磁界の影響は,通常周波数26MHz〜1GHzの妨害波
を受けることによって生じる出力の変化をもって表示する。出力の変化が最大になる周波数又は周波
数範囲を明らかにする場合は,次の例のように表示する。
例 ± 0.2% (10V/m, 50MHz)
備考 放射電磁界の試験は電波遮へい(蔽)室で行われ,信号発生器,電力増幅器,送信アンテナ,
12
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電界強度計等の大掛かりな設備を必要とする。
また,試験の際の電界強度はJIS C 1804の規定によって定められた放射電磁界のクラスの厳
しさレベルの中から選択する。
参考 試験装置及び試験方法の詳細はJEMIS 036-1994に規定されている。
携帯用トランシーバによる放射電磁界の影響を表示する場合は,試験の条件として,トランシーバ
の周波数,出力,ロッドアンテナからの距離及びアンテナの方向(水平,垂直など)を明らかにする。
その例を次に示す。
例 ± 0.2%(154MHz,1W,距離1m,アンテナ 水平)
備考 トランシーバによって発生する電界強度は,同じ定格出力のトランシーバでも型式による差異
が大きいため,製造業者名と型式を付記する。
(17) 方形波インパルスの影響:± ( ) % [( ) kV] 方形波インパルスの影響は,立上りの急なパルス電圧
(立上り時間1ns,パルス幅1 000ns)が電源周波数の周期で繰り返し印加されることによって生じる
出力の変化をもって表示する。パルス電圧が印加される箇所は通常電源線又は信号線で,印加のされ
方にはシリーズモードとコモンモードとがある。それらを明らかにする場合は,次の例のように表示
する。
例 ±0.2 %(1 kV,立上り時間1 ns,パルス幅1 000 ns,周波数50 Hz,電源線 シリーズモード)
備考 試験における方形波インパルスの印加は,結合装置(容量性結合)によるものとコンデンサと
終端抵抗(直接結合)によるものとがあり,印加時間は1分間以上である。
また,方形波インパルス電圧は,JIS C 1804の規定によって定められた方形波インパルスの
値を用いる。
参考 方形波インパルスの試験装置及び試験方法の詳細は,JEMIS 036-1994に規定されている。
(18) バースト波の影響:( ) % [( ) kV] バースト波の影響は,パルス電圧(立上り時間5 ns,パルス幅
50ns)が短時間周期(5kHz相当)で繰り返し印加される“バースト”(バースト期間15ms)によって
生じる出力の過渡変化をもって表示する(バースト周期300ms)。
バースト波電圧が印加される箇所は電源線又は信号線で,印加のされ方は,シリーズモードとコモ
ンモードがある。それらを明らかにする場合は次の例のように表示する。
例 0.3%(2kV,電源線 シリーズモード)
備考 試験におけるバースト波の印加は,容量性結合クランプによるものと直接結合(結合コンデン
サ)によるものとがあり,印加時間は1分間以上である。
また,バースト波電圧は,JIS C 1804の規定によって定められたバースト波のクラスの厳し
さレベルの中から選択する。
参考 バースト波の試験装置及び試験方法の詳細は,JEMIS 036-1994に規定されている。
(19) コモンモード電圧の影響及びシリーズモード電圧の影響:
± ( ) % [( ) V,( ) Hz]
± ( ) %[入力スパンの ( ) 倍の電圧,( ) Hz]
コモンモード電圧は,大地から絶縁された入力信号源と大地間(入力端子と接地端子間)に現れる
電圧をいい,シリーズモード電圧は,入力信号源と直列に現れる電圧(入力信号に重畳される電圧)
をいう。両者は商用電源雑音といわれる商用電源周波数の交流で,正常動作条件としての最大許容電
圧と周波数を外部影響量として [ ] 内に表示する。
備考 シリーズモード電圧は,ノーマルモード電圧ともいう。
13
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6. 確認試験 確認試験は,次による。
(1) 定格性能として表示された誤差の値を確認するために行う基準性能及び影響変動の試験は,被試験機
器の入力の下限値と上限値を含む5点以上について対応する出力を測定する。測定回数は,形式試験
の場合3回,個別試験の場合1回とする。ただし,1回の測定とは,下限値と上限値を含む入力の上
昇と下降の1往復に対する出力の測定をいう。
被試験機器の入出力特性が,出力の下限値 (0%) と上限値 (100%) を超えて少なくとも2%の余裕
をもたない場合は,出力の5%と95%をもって下限値と上限値に置き換える。
なお,確認試験に際し試験者は,製造業者の取扱説明書に従って被試験機器の接地,ウォームアッ
プ,調整など必要な準備を行う。
また,試験中においても取扱説明書に記された注意事項を守るものとする。
備考 使用者が定格性能の確認をする場合,被試験機器(サンプル)は通常1台とし,製造業者と使
用者は,互いに合意のもとに,試験目的に適合するサンプルの選定方法を定め,生産ライン又
は在庫している製品の中から1台を抽出する。
(2) 基準性能の確認試験において求める誤差は,被試験機器の各測定点における出力の誤差の中の最大値
とする。各測定点における出力の誤差とは,基準動作条件における出力の基準値からの偏差をいう。
なお,出力を高精度で測定することが困難な被試験機器の場合には,出力を特定の値(例えば,指
示計の目盛)に一致させたときの入力を測定し,得られた入力の偏差を求める。
(3) 基準性能及び影響変動の確認試験に用いる測定装置の誤差は,被試験機器の精度定格の値の41以下と
する。ただし,測定誤差が安定していて補正可能な場合を除く。
また,測定装置は確立されたトレーサビリティーのもとで定期的に校正されたものを用いる。
(4) この規格に定める事項のほかは,個別の機器の試験方法の通則又は個別規格による。
(5) この規格に定める基本的な性能を確認するための試験の種類と項目は,表2のようにまとめられる。
14
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
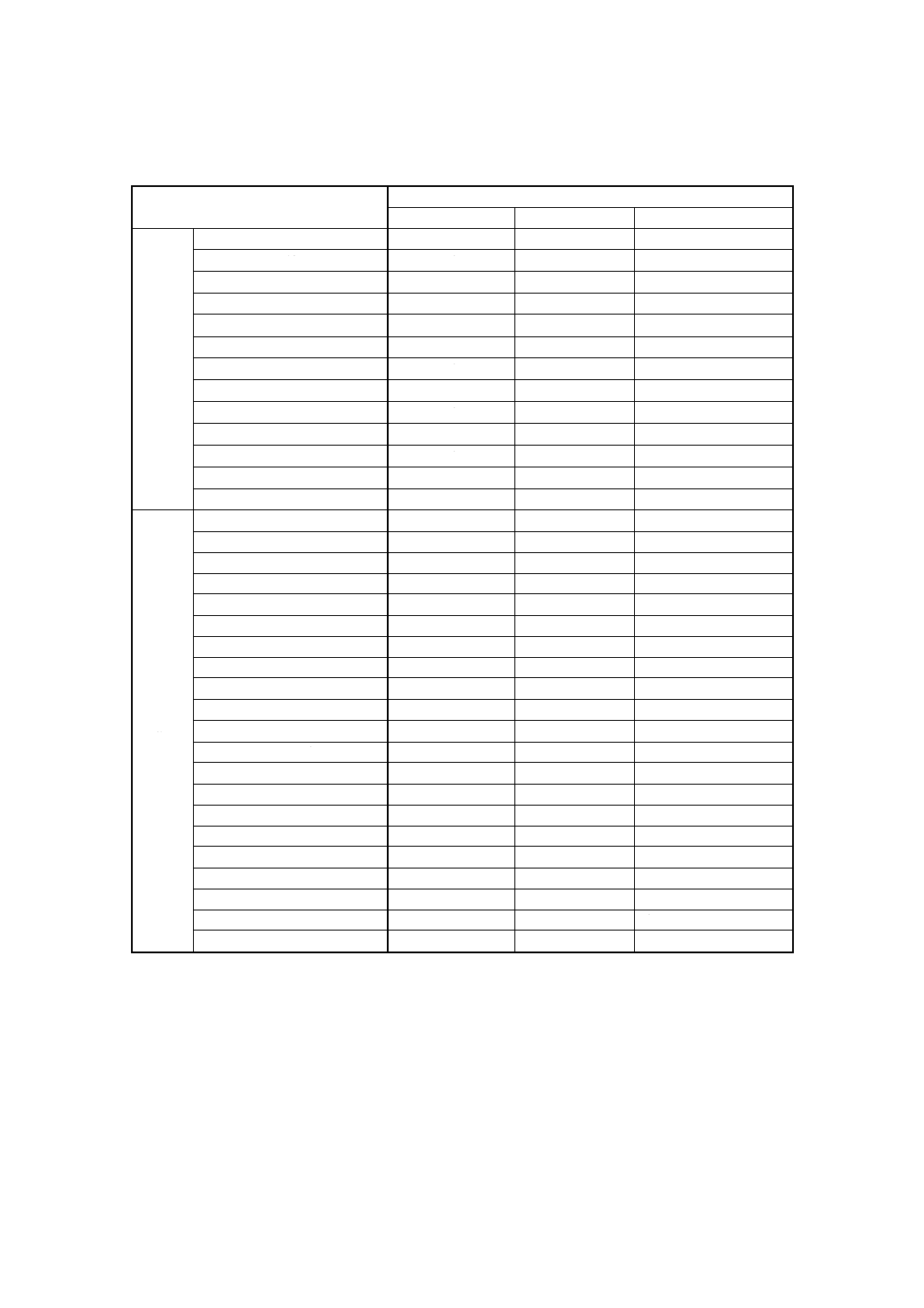
表2 性能試験の種類と項目(全機種:全機種によって実施,
選択:機種によって選択実施)
試験の項目
試験の種類
形式試験
個別試験
備考
基
準
性
能
試
験
精度定格(最大誤差)
全機種
全機種
ヒステリシス差
選択
直線性又は一致性
選択
繰返し性
選択
不感帯
選択
ステップ応答
選択
周波数応答
選択
ドリフト
選択
ウォームアップ時間
選択
消費電力
選択
絶縁抵抗
選択
選択
耐電圧
選択
選択
空気消費量
選択
影
響
変
動
試
験
温度
選択
湿度
選択
電源電圧
選択
選択
電源周波数
選択
電源ひずみ率
選択
電源瞬断
選択
供給空気圧
選択
振動
選択
衝撃
選択
取付角度
選択
過大入力
選択
信号源インピーダンス
選択
負荷インピーダンス
選択
接地
選択
外部磁界
選択
静電気放電
選択
放射電磁界
選択
方形波インパルス
選択
バースト波
選択
コモンモード電圧
選択
商用電源ノイズ
シリーズモード電圧
選択
商用電源ノイズ
15
C 1803-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
工業計器性能表示法通則JIS改正原案作成委員会 構成表
氏名
所属
(委員長)
土 屋 喜 一
早稲田大学理工学部
(副委員長)
佐 伯 浩 人
慶應義塾大学理工学部
(幹事)
伊 藤 洋一郎
山武ハネウエル株式会社
中 島 一 郎
通商産業省機械情報産業局
古 市 正 敏
工業技術院標準部
今 井 秀 孝
工業技術院計量研究所
白 崎 善 宏
千代田化工建設株式会社
熊 谷 俊 一
秩父小野田株式会社
若 林 茂 治
新日本製鐵株式会社
湯 浅 康 弘
日本鋼管株式会社
近 藤 久 男
株式会社日本触媒
魚 切 勇
日本石油精製株式会社
小 林 一 勝
三菱製紙株式会社
林 昇一郎
株式会社オーバル
岡 敏
大倉電気株式会社
公 江 春 樹
株式会社島津製作所
三 宅 順 一
株式会社東芝
桜 居 裕
株式会社日立製作所
多 胡 敬一郎
富士電機株式会社
市 川 邦 明
横河電機株式会社
(事務局)
雀 部 隆 明
社団法人日本電気計測器工業会
冨 山 正
社団法人日本電気計測器工業会