B 9991:2017
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 リスクアセスメント ·········································································································· 7
5 安全要求事項 ··················································································································· 7
5.1 一般事項 ······················································································································ 7
5.2 前庭 ···························································································································· 8
5.3 固定の囲い及び扉 ·········································································································· 8
5.4 機械式駐車装置の区画 ···································································································· 9
5.5 乗降領域 ······················································································································ 9
5.6 機械装置 ····················································································································· 14
5.7 制御装置 ····················································································································· 20
5.8 照明及び照度 ··············································································································· 29
5.9 視覚シグナル及び聴覚シグナル ······················································································· 30
5.10 通信アンテナ ·············································································································· 31
6 安全要求事項及び/又は安全方策の検証 ·············································································· 31
7 工事及び使用のための情報並びに表示及び標識 ····································································· 31
7.1 工事のための情報 ········································································································· 31
7.2 使用のための情報(取扱説明書)····················································································· 31
7.3 表示及び標識 ··············································································································· 33
附属書A(参考)機械式駐車場,機械式駐車設備及び機械式駐車装置の概念図 ································ 35
附属書B(参考)代表的な機械式駐車装置················································································ 37
附属書C(参考)重要な危険源のリスト ·················································································· 40
附属書D(参考)安全要求事項の代表的な機種への適用 ····························································· 42
附属書E(規定)強度及び安定性 ··························································································· 44
附属書F(参考)無人確認手段の選択手順 ················································································ 57
附属書G(規定)自動二輪車対応の個別要求事項 ······································································ 58
附属書H(規定)車椅子使用者対応の個別要求事項 ··································································· 63
附属書I(規定)乗降領域で同乗者を乗降してもよい機械式駐車設備の個別要求事項 ························ 65
附属書J(規定)電気自動車(EV)対応の個別要求事項 ····························································· 67
附属書K(規定)方向転換装置の個別要求事項 ········································································· 69
B 9991:2017
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,公益社団法人立体駐車場工業会(JPSMA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,国土交通大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格に従うことは,次の者の有する特許権等の使用に該当するおそれがあるので,留意する。
− 特許番号:特許第5710042号
− 特許番号:特許第5911147号
− (出願中):特開2015-212516
− 氏名:三菱重工メカトロシステムズ株式会社
− 住所:神奈川県横浜市中区桜木町1-1-8(日石横浜ビル20階)
− 特許番号:特許第4993375号
− 氏名:株式会社ニッパツパーキングシステムズ
− 住所:神奈川県横浜市西区北幸2-8-19(横浜西口Kビル6階)
− 特許番号:特許第4252232号
− 氏名:新明和工業株式会社
− 住所:兵庫県西宮市田近野町1-1
上記の,特許権等の権利者は,非差別的かつ合理的な条件でいかなる者に対しても当該特許権等の実施
の許諾等をする意思のあることを表明している。ただし,この規格に関連する他の特許権等の権利者に対
しては,同様の条件でその実施が許諾されることを条件としている。
この規格に従うことが,必ずしも,特許権の無償公開を意味するものではないことに注意する必要があ
る。
この規格の一部が,上記に示す以外の特許権等に抵触する可能性がある。国土交通大臣及び日本工業標
準調査会は,このような特許権等に関わる確認について,責任はもたない。
なお,ここで“特許権等”とは,特許権,出願公開後の特許出願又は実用新案権をいう。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 9991:2017
機械式駐車設備の安全要求事項
Safety requirements for mechanical parking systems
序文
この規格は,機械類の安全性確保のための基本概念に関するJIS B 9700に従い,機械式駐車場に用いる
機械式駐車設備の安全要求事項について規定している。
この規格の安全要求事項は,代表的な機械式駐車設備のリスクアセスメントの結果による規定である。
なお,対応国際規格は現時点で制定されていない。
1
適用範囲
この規格は,自動車などを駐車又は搬送するための搬器をもち,利用者が自ら自動車などを入出庫する,
機械式駐車設備の本質的安全設計,保護方策及び使用上の情報[JIS B 9700の6.4(使用上の情報)参照]
を含む,安全要求事項について規定する。
なお,この規格の安全要求事項は,通常使用に加え,調整・試運転作業及び保守・点検作業も想定して
規定する。
この規格は,機械式駐車装置を複合した機械式駐車設備,1台の自動車の機械式駐車設備にも適用する
ことができる。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 8821:2013 クレーン鋼構造部分の計算基準
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
JIS B 9703:2011 機械類の安全性−非常停止−設計原則
JIS B 9713-4:2004 機械類の安全性−機械類への常設接近手段−第4部:固定はしご
JIS B 9718:2013 機械類の安全性−危険区域に上肢及び下肢が到達することを防止するための安全距
離
JIS B 9960-1:2008 機械類の安全性−機械の電気装置−第1部:一般要求事項
JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
JIS C 8201-5-5 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第5節:機械的ラ
ッチング機能をもつ電気的非常停止機器
JIS C 60364-4-44:2011 低圧電気設備−第4-44部:安全保護−妨害電圧及び電磁妨害に対する保護
JIS C 60364-5-54 建築電気設備−第5-54部:電気機器の選定及び施工−接地設備,保護導体及び保
2
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
護ボンディング導体
JIS G 3106 溶接構造用圧延鋼材
JIS G 3114 溶接構造用耐候性熱間圧延鋼材
JIS G 3128 溶接構造用高降伏点鋼板
JIS G 3136 建築構造用圧延鋼材
JIS G 3444 一般構造用炭素鋼鋼管
JIS G 3445 機械構造用炭素鋼鋼管
JIS G 3466 一般構造用角形鋼管
JIS Z 3104 鋼溶接継手の放射線透過試験方法
JIS Z 9110:2011 照明基準総則
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 9700によるほか,次による。
3.1
機械式駐車場
駐車する自動車などのための,道路を境界とする車路と機械式駐車設備とを含む領域,及び管理室,発
券機,料金計算機,入出庫管制装置などの関連する諸設備を含む総称。
注記1 機械式駐車場(3.1),機械式駐車設備(3.2)及び機械式駐車装置(3.3)の概念図を,附属書
Aに示す。
注記2 自動車などとは,四輪自動車及び自動二輪車をいう。
3.2
機械式駐車設備
機械式駐車装置,外囲い及び前庭を含む構築物の総称。ただし,条件によっては,外囲いを設けない機
械式駐車設備がある。
機械式駐車装置が作動するときに外部(主に操作する場所)から見えない,見にくい(例えば,数mm
の細かな目開きの囲いの面),聴音しにくい(例えば,透明アクリル板)などの構造のものであれば閉鎖型
の機械式駐車設備であり,それに該当しないものは開放型の機械式駐車設備である。
3.3
機械式駐車装置
自動車などを入出庫するための乗降領域及び駐車するための駐車領域をもつ構築物の一部を構成する装
置であって,循環装置,搬送装置,旋回装置などから構成し,入庫を終えてから出庫するまでの間は人が
介在することなく,自動車などを駐車及び搬送する機械の総称。
代表的な機械式駐車装置の方式を,附属書Bに示す。
3.4
外囲い
機械式駐車装置を外部から隔離するために設ける,壁,フェンスなどの固定の囲い,及びそこに組み込
む出入口扉,人用扉などの扉。外囲いには,駐車・搬送領域と外部とを区画するものと,乗降領域と外部
とを区画するものとがある。
3.5
駐車領域
3
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
駐車の用に供する空間の全域。
3.6
搬送領域
搬器,自動車などを,乗降領域から駐車位置まで搬送するための空間。
3.7
駐車・搬送領域
駐車領域及び搬送領域を総称した領域。
3.8
乗降領域
搬器が停止状態であるときに,利用者が自動車などの入出庫を行う領域。機械式駐車装置が作動すると
きには,この領域の一部が搬送領域又は駐車領域となる。
3.9
駐車室
自動車などを格納するための空間又は場所。
3.10
前庭
入庫のための自動車などが待機する,出庫した自動車などが待機する,及び利用者が入出庫待ちする乗
降領域に接した領域。
3.11
自動車の通過部分
入出庫の自動車の全部又は一部が通過する,前庭と乗降領域との境界から搬器上の停車位置までの範囲。
3.12
搬器
機械式駐車装置の自動車などを載せる部分。搬送装置と一体のものと,搬送装置から分離されるものと
がある。
3.13
昇降搬送装置
搬器,自動車などの格納及び取出しで,垂直方向に搬送する装置。
なお,昇降搬器が搬器と搬器を搭載する装置とに分離されるものでは,搬器を搭載する装置部分だけを
昇降台という。
3.14
水平搬送装置
搬器,自動車などの格納及び取出しで,水平方向に搬送する装置。必要な場合は,搬器の長さ方向に搬
送する縦行搬送装置と幅方向に搬送する横行搬送装置とに細分する。
3.15
搬送台車
搬器,自動車などを積載した搬送装置自体が水平移動する搬送装置。必要な場合は,搬送台車に昇降搬
送装置を備えたものを昇降機能付搬送台車として細分する。
3.16
循環装置
4
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
搬器が直接又は間接的に連結(一時的な着脱を含む。)され,連結順序が変化することなく移動する装置。
なお,必要な場合は,垂直方向に循環する垂直循環装置,水平面で循環する水平循環装置,複数の層(上
下の複数層に搬器が配列された構造)で循環する多層循環装置とに,細分する。
3.17
旋回装置
入出庫の自動車及び搬器の方向と駐車室の方向とを一致する,又は前進運転で自動車を入出庫するため
の,機械式駐車装置内の水平面で自動車及び搬器を転向する装置。
なお,必要な場合は搬器を旋回中心に置き,その周囲の円形状の床とともに旋回する搬器内蔵旋回装置,
搬器だけ旋回する搬器旋回装置,及び搬器の旋回に必要な乗降領域床面との上下隙間を得るための搬器昇
降装置を備えた昇降付搬器旋回装置に細分する。
3.18
方向転換装置
自動車の進行方向を変えるために前庭などに設ける円形状の床が水平面で回転する装置で,機械式駐車
装置には含まれない装置。
3.19
入庫
前庭から駐車を目的とする自動車は運転して,自動二輪車は運転又は人力で押して乗降領域の搬器に乗
入れ,所定の作業の後に乗降領域から退出し,機械式駐車設備を作動してもよい状態にするまでの人の作
業。
3.20
出庫
駐車していた自動車などを退出するために乗降領域に入場し,自動車は運転によって,自動二輪車は運
転又は人力で押して乗降領域から退出し,機械式駐車設備を作動してもよい状態にするまでの人の作業。
3.21
入出庫
入庫及び出庫の両方又はいずれかの作業。入庫・出庫を明確に区分けする必要がないときに用いる。
3.22
格納
入庫した自動車などを駐車領域に搬送し,所定の駐車室に格納する動き。ただし,垂直循環装置のよう
に格納のための作動をしない装置もある。
3.23
取出し
出庫のための自動車などを駐車領域から乗降領域に搬送し,出庫を可能にする機械式駐車装置の動き。
3.24
自動車
四輪の自動車。ただし,荷台の上方が開放された貨物自動車を除く。
3.25
電気自動車
駐車中に外部からの給電で充電し,その電気エネルギーによって走行する自動車(EV)及び内燃機関に
加え外部から給電するタイプのプラグインハイブリッド車(PHV)を総称した自動車。
5
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なお,細分しない場合は自動車に含む。
3.26
自動二輪車
二輪の自動車。
注記 側車付きのものは含まない。
3.27
(自動車などの)車長,車幅及び車高
自動車などの外形寸法で,最も長いところの長さが車長,最も広いところの幅が車幅及び最も高いとこ
ろの高さが車高。
なお,これらの外形寸法は,次による。
a) ドア,荷物室扉などは閉じた状態での寸法。
b) 外部後写鏡は車幅に含まない。
3.28
(自動車などの)車重
自動車などの車重は,燃料,潤滑油,冷却水などは定められた全量を搭載し,乗員,積荷,工具及びス
ペアタイヤなどは含まない空車状態の車両質量。
3.29
出入口扉
入出庫で自動車などと人とが,又は自動車などだけが入退出するのに用いる,乗降領域と前庭との間の
扉。
3.30
区画扉
乗降領域と駐車・搬送領域又は複数の機械式駐車装置とを区画する,自動車などが通過する扉。自動車
などと人とが通過するものと,自動車だけが通過するものとがある。
3.31
通路扉
機械式駐車装置の乗降領域と,そこに接する外部(例えば,前庭,待合場所など)との移動のために,
利用者及び許可を得ている人が利用する人用の扉。
3.32
作業用扉
機械式駐車装置の内部区画(例えば,乗降領域と駐車・搬送領域との間)又は隣接する機械式駐車装置
との区画(例えば,駐車・搬送領域どうしの間)の移動のために,許可を得ている人だけが利用する扉。
3.33
非常用扉
火災などの非常時に,駐車・搬送領域などから機械式駐車設備の外に人が避難するための扉。
3.34
避難口ハッチ
火災などの非常時に,駐車・搬送領域などから上階又は下階に人が避難するための床面のハッチ。
3.35
管理責任者
6
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
機械式駐車場又は機械式駐車設備ごとに,その機械式駐車場又は機械式駐車設備の運営・管理を行う人。
3.36
取扱者
自動車などの格納又は取出しをするために,機械式駐車設備の操作を行う人。
3.37
利用者
駐車を目的として,自動車などを入出庫する人。
3.38
同乗者
駐車を目的とした自動車などの乗員のうち,利用者以外の人。
3.39
保守員
製造会社,保守会社,管理運営会社などに属して作業を行う,機械式駐車設備の保守・保全に関する適
切な知識・技量を備えた人。
3.40
作業者
製造会社,工事会社,保守会社などに属して作業を行う,機械式駐車設備の調整・試運転に関する適切
な知識・技量を備えた人。
3.41
外部者
機械式駐車場の運用開始から運用中止までの期間において,取扱者,利用者,同乗者,保守員及び作業
者を除く,機械式駐車設備の周辺に存在する人(第三者)。
3.42
(縦又は横)列式
一つ一つが機械式駐車装置になり得る装置を連結して一つにした機械式駐車設備。必要な場合は入庫方
向に連なるものを縦列式,入庫方向の側方に連なるものを横列式という。
さらに,三つ以上連結の場合は,装置の数を加え,例えば,3縦列のように細分する。
なお,列数を示さない場合は多列という。また,多列の中の一つの装置を列機という。
3.43
バース式
駐車・搬送領域と乗降領域とを区画扉で分離する,閉鎖型又は開放型の乗降領域をもつ機械式駐車装置。
3.44
自動制御
一つの操作によって,並列又は連続する複数の作動を行う制御方式。
3.45
単動制御
一つの操作によって,一つの作動を行う制御方式(ホールド・ツゥ・ランは,この単動制御に含む。)。
3.46
無人確認入力器
入出庫後に乗降領域に人がいないことを,利用者が自ら確認したことを入力する装置。
7
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.47
起動許可装置
機械式駐車設備を起動する前に,利用者が無人確認入力器(3.46)の入力を実行したことを取扱者が確
認し,入力する装置。
4
リスクアセスメント
この規格は,代表的な機械式駐車設備(代表的な機械式駐車装置は,附属書B参照)での通常使用,調
整・試運転作業及び保守・点検作業で存在する危険源についてリスクアセスメントを行い,JIS B 9700の
箇条4(リスクアセスメント及びリスク低減のための方法論)のリスク低減プロセスを繰り返し適用して
得られた結果を,箇条5の安全要求事項とした。そのリスクアセスメントによって得られた存在する危険
源を,附属書Cの重要な危険源のリストに示す。しかし,構築物である機械式駐車設備は,その固有の設
計,意図する使用又は合理的に予見可能な誤使用の結果として,この規格で想定していない危険源が存在
する可能性があり,附属書Cのリストが全ての危険源を網羅しているとは限らない。
このことから,機械式駐車設備は次の事項を考慮して各々の機械式駐車設備の設計ごとに,この規格で
想定していない危険源に対して,危険源の同定プロセスを実施しなければならない。
− 機械式駐車設備の利用形態(例えば,住宅用,時間貸しなど)の違い
− 同乗者又は外部者が,機械式駐車設備の中に入場する又は侵入する可能性
− 利用者又は同乗者が,機械式駐車設備の中に居残る可能性
− 危険源への暴露を想定する利用者,同乗者,外部者などの,人の属性又は知識のレベル差
− 危険源への暴露を想定する利用者,同乗者,外部者などの,人の予期せぬ行動
− 屋外に設置する機械式駐車設備の環境条件の違い
危険源の同定プロセスによって見つかる危険源に対しては,許容できるリスクレベル以下とするために,
3ステップメソッド(本質的安全設計方策,安全防護・付加保護方策,及び使用上の情報)によってリス
クを除去又は低減しなければならない。
リスクアセスメントで得た方策が,この規格に規定のない方策であっても,リスクを除去又は低減でき
る場合には,リスクアセスメントで得た方策を適用してもよいが,これらの方策は,少なくともこの規格
に規定する方策と同等のレベルに,リスク低減できるものでなければならない。
注記 JIS B 9700は,危険源の同定及びリスク低減を実行する場合の要求事項及び指針を与える。
5
安全要求事項
5.1
一般事項
機械式駐車設備は,この箇条(箇条5)の安全要求事項に適合しなければならない。また,リスク低減
を実行する際に,機械式駐車設備の入出庫に要する時間などの円滑性を考慮する。
さらに,関連するが重要でないために,この規格で扱っていない危険源に関しては,JIS B 9700の3ス
テップメソッドに従って設計しなければならない。
この規格の安全要求事項の代表的な機械式駐車設備への適用を,附属書Dに示す。
注記 JIS B 9700の箇条4では,リスク低減プロセスを実行する際の要因の一つとして,機能を遂行
するための機械の能力があり,機械式駐車設備においては円滑性がこれに該当する。
次に示す機械式駐車設備は,それぞれの個別要求事項に適合するように設計する。
a) 自動二輪車対応の機械式駐車設備は,附属書Gによる。
8
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 車椅子使用者対応の機械式駐車設備は,附属書Hによる。
c) 乗降領域で同乗者を乗降してもよいとする機械式駐車設備は,附属書Iによる。
d) 駐車中の充電を想定する電気自動車対応の機械式駐車設備は,附属書Jによる。
5.2
前庭
前庭は,次による。
a) 前庭は,入出庫の自動車を待機又は転向するのに必要な広さとする。
b) 前庭に方向転換装置を設ける場合は,固定の床面と方向転換装置とが同一平面上で旋回する方式とし,
附属書Kによる。
5.3
固定の囲い及び扉
機械式駐車装置と外部とを区画する外囲い,並びに乗降領域と他の領域とを区画する固定の囲い及び扉
(出入口扉,区画扉,非常用扉,通路扉及び作業用扉)は,次による。
5.3.1
固定の囲い及び扉の面
機械式駐車装置と外部とを区画する外囲い,並びに乗降領域と他の領域とを区画する固定の囲い及び扉
の面の構造は,次による。
a) 固定の囲い及び扉の面は,人の乗越えを抑止するために足掛けしにくい面とし,格子の面を用いると
きは,つま先が掛けられないように縦桟の内寸を50 mm以下とする。
b) 固定の囲い及び扉の面からの人の侵入を抑止するために,隙間(例えば,桟の内寸,囲いと囲いとの
隙間,扉と固定の囲いとの隙間,囲いの下端と設置面との隙間,囲いの上端と建造物との隙間など)
は,直径110 mmの球体が通過できない寸法とする。
c) 固定の囲い及び扉の面からの人の侵入を抑止するために,面の開口は避けなければならない。ただし,
やむを得ず開口を設ける場合は,130 mm×200 mm(両丸)を超えない寸法とする。
d) 固定の囲い及び扉の面に挿入する子供の上肢が機械式駐車装置の危険源に到達しないように,固定の
囲い及び扉の面の外面から危険部位までの距離は,JIS B 9718:2013の表5(定形開口部通過の到達−3
歳以上の人)の安全距離を満たすものとする。
5.3.2
人の押し潰し,巻込み又は切断のおそれのある部位
人の押し潰し,巻込み又は切断のおそれのある危険部位[スプロケット,車輪などの回転部,ガイドシ
ューなどのしゅう(摺)動部]に,人の手指又は下肢が固定の囲い及び扉の面から挿入しても危害を受け
ないように,次のいずれかの方法による。
a) 人の押し潰し,巻込み又は切断の危険源に子供の手指又は下肢が到達しないように,固定の囲い及び
扉の面の隙間から危険部位までの距離は,JIS B 9718:2013の表5による。
b) 身体の一部が危険部位に接触する前に作動する検知装置を設けて,これが作動したときには装置は停
止するものとする。
5.3.3
通路扉,非常用扉及び作業用扉
機械式駐車装置と外部とを区画する外囲い,並びに乗降領域と他の領域とを区画する囲いに用いる通路
扉,非常用扉及び作業用扉は,次による。
a) 通路扉,非常用扉,及び乗降領域と他の領域との間に設ける作業用扉は,クローザ(自動閉鎖)付の
扉とし,全閉したときには自動的にロックする構造でなければならない。
b) 乗降領域に設ける通路扉及び非常用扉は乗降領域側から外に向かって,駐車・搬送領域に設ける非常
用扉は駐車・搬送領域側から外に向かって,さらに,乗降領域と他の領域とを区画する作業用扉は乗
降領域側に向かって,鍵を用いなくても開く片開き戸又は引き戸とする。
9
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 乗降領域の外側から通路扉又は非常用扉を開ける場合は,鍵を用いないと開かないものとする。ただ
し,人の入退場に通路扉だけを用いる機械式駐車設備では,自動的に開作動する通路扉としてもよい。
d) 機械式駐車設備の外側から非常用扉を開ける場合,又は乗降領域側から作業用扉を開ける場合は,鍵
を用いないと開かないものとする。
e) 通路扉,非常用扉及び作業用扉の開口高さは,1 900 mm以上とする。
f)
外部から人を視認できる開放型の機械式駐車設備,又は開放型の乗降領域をもつ機械式駐車設備を除
き,乗降領域,駐車・搬送領域などにいる人が外部に退出できるよう,非常用扉(又は非常用脱出手
段)を設けるのがよい。
5.3.4
避難口ハッチ
避難口ハッチは,次による。
a) 避難口ハッチは,無孔構造とする。
b) 避難口ハッチは,機械式駐車設備の外側からは鍵又は工具で開くものとし,閉じたときには自動的に
ロックする構造とする。
c) 避難口ハッチは,機械式駐車設備の内側からは工具を用いなくても手動又は自動でロックが解除する
ものとし,外側に向かって開く構造とする。
5.4
機械式駐車装置の区画
5.4.1
一般事項
機械式駐車装置と外部とは,外囲いで区画しなければならない。ただし,次のいずれも満たす機械式駐
車装置では,区画しなくてもよい。
a) 作動する装置がいかなる位置で停止しても,人が墜落する高さが乗降領域の床面から500 mmを超え
る場所が,乗降領域にはないもの。
b) 乗降領域及び駐車・搬送領域での装置の作動範囲が,操作する場所で視認できるもの。
5.4.2
駐車・搬送領域と外部とを区画する外囲い
駐車・搬送領域と外部とを区画する外囲いは,次による。
a) 区画しなければならない機械式駐車装置(5.4.1参照)は,外部から人が侵入できないように,駐車・
搬送領域には,5.3による外囲い(壁,フェンスなどの固定の構造物,及び必要な場合に設ける扉)を
設けなければならない。
b) 外囲いは,人が囲いを乗り越える又は身体を乗り出すことによって,機械式駐車装置の作動で危害を
受けないように,囲いの面の外側から500 mmの幅において,最も高い床面から1 800 mm以上の高さ
とする。また,水平安全距離は,JIS B 9718:2013の表1(保護構造物越えの到達−低リスク)による。
ただし,乗降領域の区画と駐車・搬送領域の外囲いとを兼ねる構造の機械式駐車装置では,出入口扉
は5.5.1(乗降領域の区画)の高さとしてもよい。
5.5
乗降領域
乗降領域は,次による。
a) 乗降領域は,入出庫のための搬器,自動車の通過部分及び入出庫のために歩行する人の通路で構成す
る。ただし,縦列式の機械式駐車設備では,自動車の通過部分に前側機の搬器を含んでもよい。
b) 乗降領域は,区画を設けなくてもよい機械式駐車設備(5.4.1参照)を除き,乗降領域と接する外部及
び他の領域とを区画しなければならない。
5.5.1
乗降領域の区画
5.5.1.1
固定の囲い及び扉での乗降領域の区画
10
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
固定の囲い及び扉での乗降領域の区分けは,次による。
a) 乗降領域を構成する装置に次のいずれかの装置を含む機械式駐車装置の乗降領域の区画は,高さ1 800
mm以上の固定の囲い及び扉(5.3参照)としなければならない。ただし,b)〜f) 及び5.5.1.2を適用
する機械式駐車装置の場合は,それぞれの規定による。
1) 昇降搬送装置,垂直循環装置又は搬器旋回装置を含む機械式駐車装置
2) 搬器と搬送装置とが分離する水平搬送装置,又は水平搬送装置と搬器内蔵旋回装置とを含む機械式
駐車装置
3) 水平搬送装置だけを備える,搬器が搬送装置と一体構造の機械式駐車装置
b) 乗降領域となる各列の搬器ごとに固定の囲い及び出入口扉で区画する開放型の機械式駐車設備で,次
のいずれも満たす場合には,出入口扉の高さを1 100 mm以上1 800 mm未満としてもよい。また,各
列を搬器ごとに区分けする固定の囲いの高さも1 100 mm以上1 800 mm未満としてもよい。
1) 機械式駐車装置が通常停止しているときに,人が墜落する高さが乗降領域の床面から500 mmを超
える場所が,乗降領域及び乗降領域から人が移動できる場所には生じない。
2) 自動制御でも,単動制御の作動速度[5.7.3 b) 参照]を超えない。
3) 扉乗越え検知装置(5.7.6.4参照)を設けている。
c) 閉鎖型の縦列式の機械式駐車設備では,前側機と奥側機との間を固定の囲い及び区画扉,又は区画扉
だけで区画しなければならないが,区画の高さは,次による。
1) 区画扉が全閉のときに,奥側機の作動と前側機の入出庫とを同時に行う縦列式では,前側機と奥側
機との間の固定の囲い及び区画扉の高さは,1 800 mm以上とする。
2) 外囲いとしての出入口扉の高さが1 800 mm以上の縦列式で,前側機で入出庫しているときには奥
側機を作動しない場合には,前側機と奥側機との間の固定の囲い及び区画扉の高さを1 100 mm以
上1 800 mm未満としてもよいが,区画扉に扉乗越え検知装置(5.7.6.4参照)を設けるものとする。
d) 開放型の縦列式の機械式駐車設備では,前側機と奥側機との間を固定の囲い及び区画扉,又は区画扉
だけで区画しなければならないが,b) の1)〜3) を満たす区画扉の場合は,区画の高さを1 100 mm以
上1 800 mm未満としてもよい。
e) バース式の乗降領域で次の全てを満たすものは,乗降領域と駐車・搬送領域との間の区画を除き,固
定の囲い及び扉の高さを1 100 mm以上1 800 mm未満としてもよい。
1) a) の2) 又は3) の機械式駐車装置
2) 乗降領域と駐車・搬送領域とを,高さ1 800 mm以上又は壁の開口部を塞ぐ閉鎖型の区画扉で分離
している。
なお,出入口扉及び区画扉は,上方開き又は水平開きの扉とするのがよい。
3) 乗降領域を構成する装置がいかなる位置で停止しても,人が墜落する高さが乗降領域の床面から
500 mmを超える場所が,乗降領域にはない。
4) 乗降領域を構成する装置での人の押し潰し,巻込み又は切断の危険源に,固定の囲い及び扉の上端
から人が身体を乗り出しても上肢が到達しない距離を確保している,又は到達しても重度の危害を
受けるおそれが低い。
5) 固定の囲い,出入口扉,通路扉などは,隙間から人の上肢及び手指を挿入しないような,無孔構造
である。ただし,有孔構造の場合は,子供の上肢又は手指が面の隙間から危険源に到達しないよう
に,JIS B 9718:2013の表5の安全距離を満たしている。
6) 区画扉がいかなる位置で停止しても,人が墜落する高さが,乗降領域又は駐車・搬送領域の床面か
11
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ら500 mmを超える場所が,乗降領域の床に接する駐車・搬送領域には生じない。ただし,500 mm
を超える場所が生じる場合は,110 mmの球体が通過できない隙間とする,130 mm以下×200 mm
以下(両丸)の開口とする,110 mmの球体が通過できない内寸の縦桟で,高さ1 100 mm以上の防
護柵を設けるなどで,人の墜落を抑止していてもよい。
なお,駐車・搬送領域の固定の囲いの面,昇降搬送装置の支持構造物などの隙間から子供が墜落
しないように,駐車・搬送領域の床面から1 100 mmの高さまでは,110 mmの球体が通過できない
隙間とする。
7) 乗降領域の床に接する駐車・搬送装置側には,許可を得ている人を除き移動できないように,通路
又は昇降設備がない,5.3.3に規定の作業用扉がある,又は5.6.5.1 b) に規定の昇降設備があるなど
とする。
f)
バース式の乗降領域で次のいずれも満たすものは,出入口扉を設けなくてもよい。
1) a) の3) 及びe) を満たす機械式駐車装置
2) 自動車が入出庫する乗降領域の出入口部分には,出入口扉に代えて3ビーム以上の光ビーム装置又
は光カーテンを用いた乗降領域を区画する検知装置(5.7.6.1参照)を設けている。
注記1 検知装置が作動してから装置が停止するまでの時間,及び人の接近速度及び危険源までの
距離とによっては危険回避できない。
注記2 3ビーム以上でも人の上肢又は手指の挿入は可能で,危険源に到達するおそれがある。
5.5.1.2
検知装置での乗降領域の区画
検知装置での乗降領域の区画は,次による。
a) 次を全て満たす機械式駐車設備は,乗降領域と駐車・搬送領域とを検知装置で区画してもよい。
1) 開放型の機械式駐車設備である。
2) 自動制御でも,単動制御の作動速度[5.7.3 b) 参照]を超えない。
3) 駐車・搬送領域に直接入出庫する機械式駐車設備では,乗降領域に用いる各列又は複数列を一つと
する多列の出入口扉を設けている。
4) 機械式駐車装置が通常停止しているときに,乗降領域の床面と同じレベルの全ての搬器に対して,
搬器と搬器との間,及び搬器と外囲いとの間に,乗降領域を区画する検知装置を設けている。
b) a) を適用する機械式駐車設備で,次のいずれも満たす場合には,出入口扉の高さを1 100 mm以上1 800
mm未満としてもよい。
1) 機械式駐車装置が通常停止しているときに,人が墜落する高さが乗降領域の床面から500 mmを超
える場所が,乗降領域及び乗降領域から人が移動できる場所には生じない。
2) 扉乗越え検知装置(5.7.6.4参照)を設けている。
c) a) を適用する縦列式の機械式駐車設備の前側機と奥側機との区画には,固定の囲い及び区画扉,又は
区画扉に代えて,乗降領域を区画する検知装置[5.7.6.1 b) 参照]を用いてもよい。
5.5.2
乗降領域の寸法及び構造
5.5.2.1
自動車の通過部分
自動車の通過部分は,次による。
a) 出入口扉から又は出入口扉に相当する位置から搬器に載るまでの自動車の通過部分は,自動車の車幅
に500 mmを加えた幅以上とする。ただし,柱,チェーンなどの局部的な狭あい部が構造上避けられ
ない場合は,400 mmを加えた幅以上としてもよい。
b) 搬器の長さ範囲では,自動車の車幅に500 mmを加えた幅以上とする。ただし,搬器を連結する柱,
12
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
チェーンなど,機械式駐車装置の構造上避けられない部分は局部的な狭あい部としてもよく,その幅
は車幅に150 mmを加えた幅以上とする。
c) 自動車の通過する部分の高さ,出入口扉及び区画扉の開口高さは,自動車の高さに50 mmを加えた寸
法で,かつ,1 600 mm以上としなければならない。
なお,自動車の通過部分を人の通路として併用する場合は,1 900 mm以上の高さとしなければなら
ない。
5.5.2.2
乗降領域の人の通路
乗降領域の人の通路は,次による。
a) 通路の位置 乗降領域の人の通路は,自動車の両側方に設けなければならない。ただし,片側だけに
しか通路を設けることのできない機械式駐車装置では,右ハンドル車の運転席側に通路を設けるもの
とするが,左ハンドル車を対象とする場合は,左ハンドル車の運転席側としてもよい。
b) 乗降領域で人の接近を制限する場所には,110 mmの球体が通過できない内寸の縦桟で,高さ1 100 mm
以上の防護柵を設けなければならない。
c) 通路の幅 乗降領域の人の通路の幅は,次による。
1) 人の通路の内のり幅は500 mm以上,床面の幅は300 mm以上とする。
なお,床面の幅の内側にある40 mm以下の隙間は,床面とみなしてもよい。
2) 機械式駐車装置の構造上,人の通路の内のり幅が一部分で500 mm以上を満たせない場合の狭あい
部は,次による。
− 狭あい部の通路の内のり幅は,300 mm以上とする。
− 狭あい部の長さは300 mm以下で,狭あい部どうしの間隔は2 000 mm以上とする。
− 狭あい部の床面は,幅が130 mm以上の床面が1列又は2列あるものとする。
3) 自動車の前角部が人の通路に接する場合は,前角部に250 mm×250 mmの平面すみ切りを想定して
もよい。
なお,当該部の通路の内のり幅は,300 mm以上としてもよい。
d) 通路の高さ 乗降領域の人の通路の高さは,1 900 mm以上とする。
e) 危害及び汚損の保護 乗降領域の人の通路での危害及び汚損の保護は,次による。
1) 少なくとも乗降領域の床面から1 900 mmまでの高さの範囲にある鋭利な端部,鋭角部,粗い表面
などは,歩行する人の身体に危害を与えないように,適切に処理する。
2) 乗降領域の人の通路では,衣服などが汚損するおそれのある部分には,身体が直接触れないものと
する。
5.5.2.3
乗降領域の床面
乗降領域の床面は,次による。
a) 床面の隙間 乗降領域の床面の隙間は,次による。
1) 乗降領域で人の通路とする場所の床面の隙間は,20 mm以下とする。ただし,構造上避けられない
(例えば,可動部と可動部又は固定部との隙間)場合は40 mm以下としてもよい。
2) 乗降領域で人の通路としない場所の床面の隙間は40 mm以下とする。ただし,構造上避けられない
場合には,110 mm以下の隙間としてもよい。
なお,500 mmを超える深さの場所で,40 mmを超える隙間には,100 mm以上の,最低でも30 mm
以上の高さのつま先板を設けるものとする。
b) 床面の段差及び凹凸 乗降領域の床面の段差及び凹凸は,次による。
13
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 乗降領域の床面の段差は,設けないものとする。ただし,構造上段差が避けられない場合,蹴上高
さは230 mm以下とする。
2) 乗降領域の床面の凹凸は,6 mm以下とする。ただし,構造上避けられない場合は,20 mm以下と
する。
c) 床面の滑り 乗降領域で人の通路とする床面は,材料,加工,塗装などによって,滑りにくいものに
する。
5.5.2.4
乗降領域の開口部
人が墜落する高さが床面から500 mmを超える開口が乗降領域にある場合は,次のいずれかの方法で保
護しなければならない。
a) 無孔の床材で塞ぐものとする。
b) 無孔の床材で塞ぐのが困難な(例えば,移動するケーブルが貫通する。)場合は,110 mmの球体が通
過できない内寸の桟,又は130 mm×200 mm(両丸)を超えない開口とし,さらに,40 mm以上の開
口部の端には,100 mm以上の,最低でも30 mm以上の高さのつま先板を設けるものとする。
c) 110 mmの球体が通過できない内寸の縦桟で,かつ,高さ1 100 mm以上の防護柵を設けるものとする。
5.5.2.5
乗降領域での自動車の墜落保護
入出庫の自動車運転の誤りで自動車が搬器奥側に,又は搬器側方にはみ出したときに,自動車が墜落す
る高さが搬器上面から2 000 mmを超える部分がある機械式駐車装置は,次のいずれかの方法で自動車の
墜落を防護する。
a) 墜落のおそれのある開口の前面に,自動車の墜落防護柵を設けるものとする。
b) 墜落のおそれのある開口を,自動車の墜落を抑止する床又は部材で塞ぐものとする。
5.5.3
乗降領域の安定性
5.5.3.1
乗降領域の搬器
乗降領域の搬器は,次による。
a) 乗降領域の搬器は,入庫の自動車の最大荷重,又は自動車の前輪が負担する荷重が搬器に作用したと
きに,搬器端の落込み若しくは跳ね上がりによる傾斜,又は降下がないように,次の方法を用いなけ
ればならない。
なお,搬器の変形,及びチェーン若しくはロープの伸びを含む搬器の傾斜又は降下によって,自動
車が通過する側の搬器端での段差が50 mmを超えてはならない。
1) 搬器固定装置を設けて,入庫の自動車の最大荷重,又は自動車の前輪が負担する荷重が搬器に作用
したときに,搬器の傾斜又は降下を抑制する。
なお,この搬器固定装置は,c) の1) の搬器降下制限装置を兼ねてもよい。
2) 入庫の自動車の前輪が負担する荷重が搬器に作用したときに,搬器の質量で跳ね上がりを抑止する。
3) トラクション式を用いた昇降搬送装置では,入庫の自動車の最大荷重,又は自動車の前輪が負担す
る荷重が搬器に作用したときに,ロープの滑りで搬器が降下又は傾斜しないように,摩擦力に適切
な余度を見込まなければならない。
b) 乗降領域の搬器は,入出庫する自動車の下面での引きずり,自動車の停止時のブレーキ力,又は発進
時の加速力によって定常位置から逸脱しないように,次の方法で抑止しなければならない。
1) ガイドのない搬器を用いる昇降搬送装置は,入出庫における自動車の発進,停止及び引きずりで搬
器がずれないように,搬器固定装置を備えなければならない。
なお,この搬器固定装置は,c) の1) の搬器降下制限装置を兼ねてもよい。
14
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2) 搬器に作用する水平力によって,昇降搬送装置のロープ及びチェーンが外れるおそれがある,ドラ
ム,シーブ,スプロケット又はローラには,ロープ及びチェーンの外れ止めを設けなければならな
い。
3) 水平搬送装置の搬器は,入出庫における自動車の発進,停止及び引きずりで,車輪がレールから外
れて落下するのを抑止する構造としなければならない。
c) 搬器降下制限装置 搬器降下制限装置を設けなければならない機械式駐車装置は,次による。
1) 乗降領域の床を構成する搬器が,不具合(例えば,チェーン又はロープの切断)によって500 mm
以上降下する機械式駐車装置では,降下で人に危害を及ぼさないよう,床を構成する搬器の降下量
を50 mm以下に制限する,搬器降下制限装置を設けなければならない。
2) 乗降領域の上方に停止している昇降搬送装置の搬器が,不具合によって降下又は落下して,乗降領
域にいる人を押し潰すおそれのある機械式駐車装置では,搬器の降下量を50 mm以下に制限する,
搬器降下制限装置を設けなければならない。
5.5.3.2
搬器内蔵旋回装置
搬器内蔵旋回装置は,次による。
a) 乗降領域の搬器内蔵旋回装置は,入出庫の自動車の通過で傾斜又は降下がないように,支持しなけれ
ばならない。
b) 搬器内蔵旋回装置の端部に自動車が載ったときに,自動車の通過する部分と他の床面との段差は,50
mmを超えてはならない。
5.5.3.3
可動床装置
可動床装置は,次による。
a) 自動車の通過する部分となる乗降領域の可動床装置は,入出庫の自動車の通過で傾斜又は降下がない
ように,支持しなければならない。
b) 可動床装置の端部に自動車が載ったときに,自動車の通過する部分と他の床面との段差は,50 mmを
超えてはならない。
c) 乗降領域を構成する可動床が,不具合によって500 mm以上降下する機械式駐車装置では,降下で人
に危害を及ぼさないように,床の降下量を50 mm以下に制限する,可動床降下制限装置を設けなけれ
ばならない。
5.5.4
乗降領域への降下保護装置(移動天井など)
乗降領域への降下保護装置は,次による。
a) 乗降領域の上部に駐車領域がある縦列式で,奥側機への入出庫中に前側機が作動する機械式駐車装置
では,前側機の乗降領域に搬器及びカウンタウェイトが降下しないように,降下保護装置を設けなけ
ればならない。
b) 乗降領域の天井となる降下保護装置(ただし,駐車領域にある無孔構造の搬器は,天井の一部として
もよい。)は,無孔構造の材料を用いるものとする。
5.6
機械装置
5.6.1
駐車領域及び搬送領域
5.6.1.1
駐車室
駐車室は,次による。
a) 駐車室空間 駐車室は駐車可能な最大の自動車の大きさに対して,次の寸法を満たさなければならな
い。
15
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 駐車室の長さは,車長に200 mmを加えた寸法とする。
2) 駐車室の幅は,車幅に150 mmを加えた寸法とする。
3) 駐車室の高さは,車高に50 mmを加えた寸法で,かつ,1 600 mm以上とする。
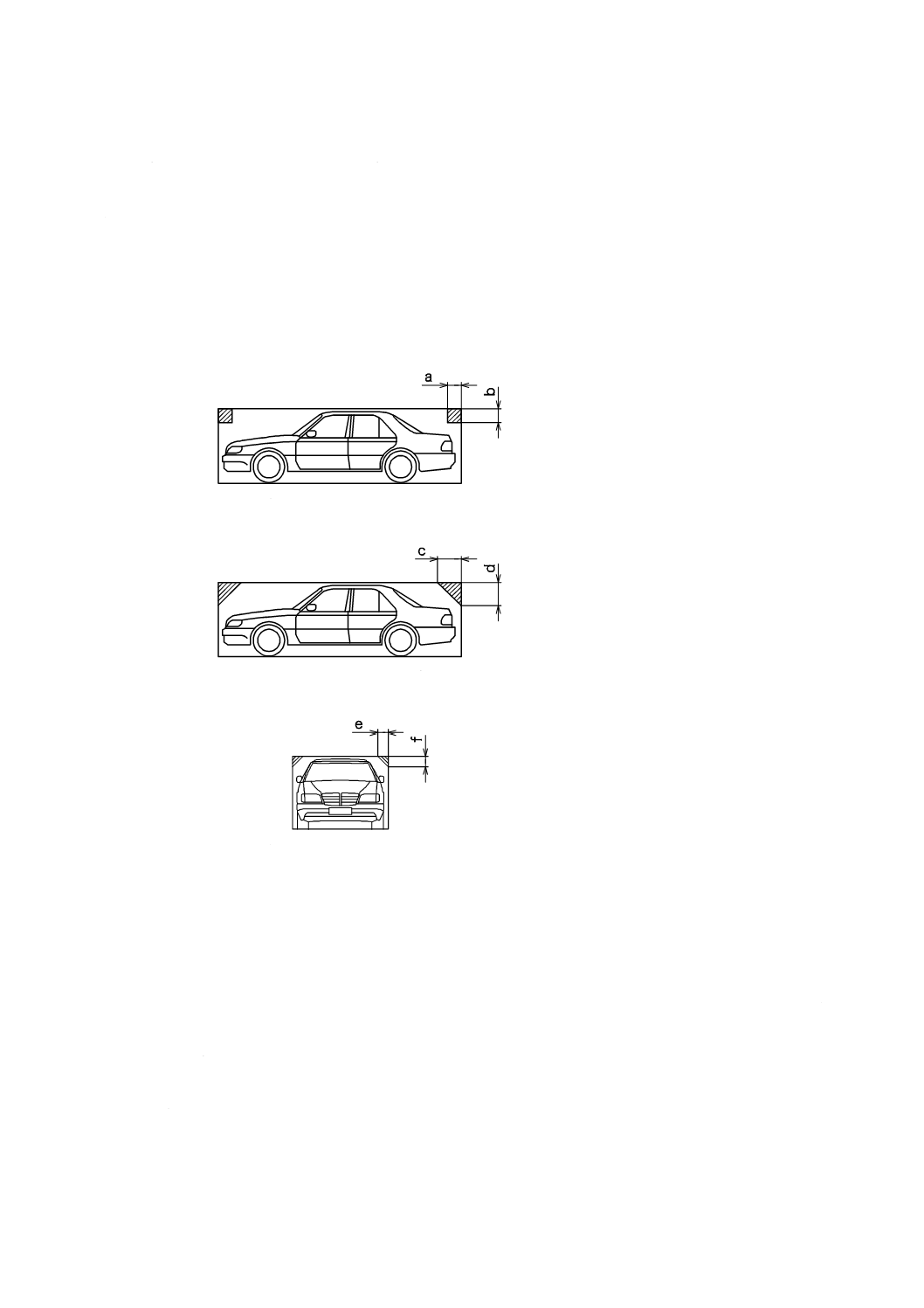
b) すみ切り 駐車室の上部は,駐車する自動車の形状を考慮して,図1に示す“すみ切り”を設けても
よい。ただし,制限を超える自動車を格納しないように,次のいずれかの方法を用いるものとする。
1) すみ切り制限装置(5.7.7.2参照)を設ける。
2) すみ切り制限を目視で確認できる(例えば,乗降領域に“すみ切り”を模した傾斜板を設け,自動
車と干渉しないことを目視するなどの)方法を適用する。
a<600 mm
b<600 mm
かつ
a+b≦600 mm
a) 自動車側面方向(長方形)
c≦600 mm
d≦600 mm
b) 自動車側面方向(三角形)
e≦300 mm
f≦300 mm
c) 自動車正面方向(三角形)
図1−すみ切り
c) 駐車室の搬器及び自動車の落下防護設備 風荷重(E.4参照)又は地震荷重(E.5参照)によって,駐
車領域の搬器及び自動車が機械式駐車装置の外部に落下するおそれがある場合は,駐車領域の外周に
落下防護柵などを設けなければならない。
d) 駐車室搬器の水平移動制限装置 地震荷重の作用によって駐車室を構成する搬器が水平移動し,昇降
搬送路から乗降領域に落下するおそれのある構造の機械式駐車装置は,水平移動を制限する装置を設
けなければならない。
なお,水平移動制限装置は,地震時において,機能を失うおそれのある搬器の跳ね上がり,脱輪な
ども防止する構造とする。
5.6.1.2
搬送領域
昇降搬送及び水平搬送に必要な空間は,駐車室と同じ寸法を確保するのがよい。
16
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.6.2
搬送装置
5.6.2.1
通常使用の搬器
通常使用の搬器は,次による。
a) 自動車のタイヤで停車位置を規制する自動車の移動抑制装置は,入庫する自動車が進入方向奥側には
み出さない位置に設けなければならない。
b) 縦行搬送装置又は旋回装置をもつ機械式駐車装置では,高さ25 mm以上の自動車のタイヤ止めを設け
なければならない。
c) 車長方向に搬器が10度を超えて傾斜する機械式駐車装置は,10度までは自動車の駐車ブレーキの制
動力で,それを超える下降力は適切な高さの自動車のタイヤ止めで,自動車の移動を抑止しなければ
ならない。
d) 保守,検査などの作業床として,人を乗せて作動することを意図する搬器には,搬器の中央付近に想
定する人数と同数で,座位の使用に適した安全帯係留金具を設けなければならない。
5.6.2.2
作業用搬器
作業用搬器は,次による。
a) 据付後の調整,試運転などで,搬器に人を乗せての作動を意図する機械式駐車装置は,人を乗せるた
めの少なくとも1台は,作業用搬器として次を満たさなければならない。
1) 搬器の周囲に,高さ1 100 mm以上で中桟のある固定防護柵を設けるものとする。
2) 防護柵は,搬器の外端から100 mm以上内側に設けるものとする。
b) 搬器を搭載していない昇降台,又は搬器を兼ねる昇降台に人を乗せての作動を意図する場合は,次を
満たさなければならない。
1) 一人当たり450 mm×600 mm以上の,人を乗せるための床を設けるものとする。
2) 床の周囲には,高さ1 100 mm以上で中桟のある固定防護柵を設けるものとする。ただし,固定防
護柵の位置は,搬器の外端から100 mm以上内側としなければならない。
5.6.2.3
ブレーキ装置
ブレーキ装置は,次による。
a) 昇降搬送装置には,停電などで電源が遮断されたときに自動的に制動するブレーキ装置を,設けなけ
ればならない。
b) 昇降又は垂直循環する装置に設けるブレーキ装置は,最大負荷又は最大のアンバランスの状態で定格
速度から作動を停止し,停止位置を維持する機能をもつものとする。
c) 昇降又は垂直循環する装置のブレーキ装置の制動力は,最大負荷又は最大のアンバランスの状態で発
生するトルクの1.5倍以上とする。
d) 昇降及び垂直循環以外の装置に用いるブレーキ装置は,最大負荷又は最大のアンバランスの状態で定
格速度から作動を停止し,停止位置を維持する機能及び制動力をもつものとする。
5.6.2.4
ドラム径及びシーブ径
つり上げ装置に用いるワイヤロープのドラム径及びシーブ径は,ロープ径の20倍以上としなければなら
ない。
5.6.2.5
ロープの外れ止め装置
つり上げ装置のシーブには,ロープの外れ止め装置を設けなければならない。
5.6.2.6
搬送装置のガイド部,ガイドレール及び支持部分
昇降装置の搬器及びカウンタウェイトのガイド部,脱輪での落下で人に危害を加えるおそれのある水平
17
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
搬送装置又は搬送台車のガイド部,並びにガイドレール及び支持金物は,地震荷重が作用したときに搬器,
カウンタウェイトなどが外れないような構造及び強度のものとする。
5.6.2.7
ローラチェーン
オープンエンドのローラチェーンを用いたつり上げ装置では,ローラチェーンとスプロケットとが正し
くかみ(噛)合うように,負荷のない側にも適切な張力を加える構造としなければならない。ただし,負
荷のない側のローラチェーン端部に張力をかけるのが困難な場合には,浮上がり,巻付き又は絡みが生じ
ないように,機械的に抑制する装置を設けなければならない。
5.6.3
油圧装置
5.6.3.1
停止装置
停止装置は,次による。
a) 停電などで電源が遮断されたときに,搬送装置が自動的に作動を停止するための機器(例えば,逆止
弁)を設けなければならない。
b) 昇降搬送装置に用いる油圧シリンダでは,作動油の逆流で搬器が降下しないようにするための機器(例
えば,逆止弁)を設けなければならない。
5.6.3.2
圧力安全弁
油圧装置には,常用圧力(定格荷重を定格速度で作動するための油圧力)の1.5倍を超える圧力上昇が
生じる前に作動する,圧力安全弁を設けなければならない。
5.6.3.3
自然降下保護装置
昇降搬送装置のプランジャ,バルブなどの油圧機器からの油漏れで,停止している搬器が降下しないよ
うに,次のいずれかの方法を用いるものとする。
a) 搬器降下制限装置[5.5.3.1 c) 参照]を設ける。
b) 自動復帰する油圧回路を設ける。
c) 停止位置を保持する油圧回路を設ける。
5.6.3.4
プランジャの離脱制限装置
油圧シリンダからプランジャが抜け出さないように,プランジャの離脱制限装置を設けるものとする。
5.6.4
調整作業及び保守作業側面の安全要求事項
5.6.4.1
墜落保護設備
墜落保護設備は,次による。
a) 乗降領域を構成する装置が定常位置に停止していないときに,人が墜落する高さが乗降領域の床から
1 000 mmを超える機械式駐車装置では,開口部への人の墜落保護のために,次のいずれかの手段を備
えるのがよい。
1) 開口部の周囲にある機械式駐車装置の部材に,安全帯を係留できるものとする。
2) 出入口扉,又は人用扉から進入する保守員などが,直ちに安全帯を係留できる手すり又は係留金具
を設けるものとする。
3) 開口部の周囲に保護ロープを展張するための金具を設けるものとする。
b) 区画扉を用いた機械式駐車装置の駐車・搬送領域側に,人が墜落する高さが乗降領域の床から1 000
mmを超える場所の開口部周囲は,中桟のある高さ1 100 mm以上の固定防護柵を設けなければならな
い。ただし,防護柵が設けられない場合は,安全帯を係留できる機械式駐車装置の部材がある場所を
除き,安全帯の係留金具を設けるものとする。
c) 調整作業及び保守作業などにおいて,人が墜落する高さが床面又は足場から1 000 mmを超える次の
18
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
場所には,安全帯を係留できる機械式駐車装置の部材がある場所を除き,係留金具を設けなければな
らない。
1) 昇降搬送装置の搬器と駐車領域の搬器との間で,人が乗り移りする場所。
2) 昇降搬送装置の搬器上で身体を乗り出して,又は昇降搬送装置の搬器から乗り移りして,作業する
場所。
d) 人が墜落する高さが1 000 mmを超える部分が生じる場所(例えば,昇降開口が生じる乗降領域,駐
車・搬送領域にある昇降搬送装置のピット近傍など)に制御盤を設置する場合は,防護柵を設けるも
のとする。ただし,防護柵を設けることができない場合は,安全帯を係留できる手すり又は係留金具
を設けるものとする。
5.6.4.2
カウンタウェイトでの人の押し潰し保護
カウンタウェイトでの人の押し潰し保護は,次による。
a) 昇降搬送装置のカウンタウェイトが昇降する領域で,人が接近するおそれのある次の場所には,ガー
ドを設けなければならない。
1) 駐車領域の搬器上で作業する人が,容易に接近できる場所
2) 搬器とカウンタウェイトとが向き合う機械式駐車装置で,それらが交差する場所
3) カウンタウェイトが昇降する領域の下部床
b) ガードは1 800 mm以上の高さとし,桟の内寸は乗降領域では110 mm以下,その他の場所では180 mm
以下にしなければならない。
5.6.4.3
頭部の衝撃保護
搬送台車を備える機械式駐車設備で,搬送台車の操作部に作業者又は保守員が乗って走行する搬送台車
では,作業者又は保守員の頭部が衝撃,切断又は押し潰しの危害を受けるおそれのある高さに達しないよ
うに,次のいずれかの方法を用いるものとする。
a) 搬送台車の操作部にヘッドガードを設けるものとする。
b) 搬送台車の操作部に人の頭頂部を検知する装置を設け,検知する装置が作動したときには,搬送台車
が走行しないインタロック機能を設けるものとする。
c) 搬送領域に人の頭頂部を検知する装置を設け,検知する装置が作動したときには,搬送台車の走行を
非常停止するものとする。
5.6.4.4
つり金具及びつり孔
クレーンなどでのつり上げで,不安定なつり荷の姿勢になるおそれのある部材及び機器は,据付作業の
リスクアセスメントを行い,その結果,不安定なつり荷のリスクを低減しなければならない部材及び機器
には,つり金具又はつり孔を設けるものとする。
5.6.4.5
避難経路
昇降搬送装置の機械室,駐車室などから,隣接する区画との間で人が移動できる構造の場合には,保守
員などが避難経路として使用できるように,隣接する区画との間に非常用扉を設けるのがよい。
5.6.5
固定はしご
5.6.5.1
一般事項
固定はしごに関する一般事項は,次による。
a) 外部から機械式駐車装置に接近する又は機械式駐車装置内を移動するために,昇降手段として固定は
しごを用いる場合は,保守作業などで必要とする場所だけに設けるものとする。
b) 許可を得ている人だけが固定はしごを使用できるよう,次のいずれかの方法を用いるものとする。
19
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 汎用工具で解除又は解放しないときには,地上2 000 mmまでの高さの桟には手足が掛けられない
昇降抑止装置付の固定はしごとする。
2) 地上2 000 mmの高さまでの移動はしごと,地上2 000 mmの高さからの常設固定はしごとを併用す
る。
注記 移動はしごは,許可を得ている人以外は持ち出しできない場所に保管しない限り,昇降を
抑止する効果は得られない。
5.6.5.2
主たる昇降手段の固定はしご
人の昇降手段として固定はしごを常用する(例えば,昇降搬送装置を人の移動手段に用いない,固定は
しご以外の昇降手段がないなど)場合は,JIS B 9713-4:2004による固定はしごとする。
5.6.5.3
補助的な昇降手段の固定はしご
固定はしごを主たる昇降手段としない(例えば,主な昇降手段として,建設作業ではゴンドラ及び昇降
搬送装置を,保守作業では昇降搬送装置を用い,故障復旧などの緊急時,上下の駐車室との短い昇降距離
の移動などのために,固定はしごを短時間使用する場合など)機械式駐車装置では,機械式駐車装置の寸
法制約で千鳥状の連はしごにできないなど,やむを得ない場合には次による。
a) 搬器を休み場所として利用できる場合に限り,昇降高さにかかわらず,単一登りの固定はしごとして
もよい。
b) 昇降するための平面寸法は,JIS B 9713-4:2004の図4.d(安全囲いなしはしごの平面図)によらず,
人体が通過できる寸法としてもよい。
5.6.6
強度及び安定性
5.6.6.1〜5.6.6.4に規定する構造部分,機械部分及び異常時荷重を考慮する個別の装置部分の強度,並び
に乗降領域の安定性は,附属書Eによって検証する。
5.6.6.1
構造部分の強度
構造部分の強度は,次による。
a) 乗降領域の自動車の通過部分,搬器及び人の通路,並びに自動車の転落する高さが,搬器上面から2 000
mmを超える部分のある搬器奥側及び搬器側方の床部分は,入出庫の自動車及び人に対して必要な強
度をもつものとする。
b) 昇降搬送装置,水平搬送装置,旋回装置などの支持構造物,及び搬器,昇降台,搬送台車などの可動
部分は,その装置が作動するときに生じる荷重に対して必要な強度をもつものとする。
c) 機械式駐車装置全体又は駐車室,昇降搬送装置,水平搬送装置,旋回装置などの支持構造物,部材及
びアンカーボルトの部分は,作用する荷重に対して必要な強度をもつものとする。
d) 風を考慮する機械式駐車設備の装置全体,又は駐車室,昇降搬送装置,水平搬送装置,旋回装置など
の支持構造物,部材及びアンカーボルトの部分は,風荷重に対して必要な強度をもつものとする。
e) 装置全体,又は駐車室,昇降搬送装置,水平搬送装置,旋回装置などの支持構造物,部材及びアンカ
ーボルトの部分は,地震時の水平荷重に対して必要な強度をもつものとする。
5.6.6.2
機械部分の強度
機械部分の強度は,次による。
a) ワイヤロープ及びローラチェーンは,その装置が作動するときに生じる荷重に対して必要な強度をも
つものとする。
b) 油圧装置は,常用圧力に対して必要な強度をもつものとする。
5.6.6.3
異常時荷重を考慮する個別の装置部分の強度
20
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
異常時荷重を考慮する個別の装置部分の強度は,次の装置について,検証する。
異常時荷重を考慮する個別の装置及び装置部分は,次による。
a) 5.5.3.1 a) 1) に規定する乗降領域の搬器固定装置及び5.5.3.1 c) 1) に規定する搬器降下制限装置
b) 5.5.3.3 c) に規定する乗降領域の可動床降下制限装置
c) 5.5.4に規定する乗降領域への降下保護装置及び5.5.3.1 c) 2) に規定する搬器降下制限装置
d) 5.7.8 b) 3) に規定する機械式終端装置
e) 5.6.1.1 c) に規定する駐車室の搬器及び自動車の落下防護設備
f)
5.6.1.1 d) に規定する駐車室搬器の水平移動制限装置
g) 5.6.2.6に規定する搬送装置のガイド部,ガイドレール及び支持部分
5.6.6.4
乗降領域の安定性
自動車の入出庫で跳ね上がるおそれのある乗降領域の床部分は,安定性を検証する。
5.7
制御装置
5.7.1
一般事項
5.7.1.1
電源
機械式駐車装置に供給する電源は,他の負荷の使用状態にかかわらず,JIS B 9960-1:2008の4.3(電源)
の規定を満たさなければならない。
5.7.1.2
感電保護
制御装置の感電保護は,次による。
a) 電気装置はJIS B 9960-1:2008の箇条6(感電保護)に規定する,感電しないように人を保護するため
の方策に適合しなければならない。
b) 電気装置は,JIS C 60364-5-54に従って,適切な種別の接地をしなければならない。
c) 制御盤の動力回路には,漏電遮断器を設置しなければならない。
d) 電気装置は,設置環境(例えば,屋外設置での雨水,地下設置での湿度,ピットへの流入水など)に
適合する適切なエンクロージャの保護等級としなければならない(JIS C 0920参照)。
e) 電気設備(例えば,制御盤,制御機器)は,流入水のおそれのあるピット内への配置を避けるのがよ
い。
f)
屋外又は水滴が飛散するおそれのある場所に設置する検知装置は,カバーなどで保護するのがよい。
5.7.1.3
電磁的保護
前庭に接する電気機器(例えば,通常使用の操作盤,出入口扉の電気機器,無線機器など)で,他の電
気機器(例えば,体内埋込みの医療機器)に影響を及ぼすおそれがある場合には,JIS C 60364-4-44:2011
の444.4.2(電磁障害を低減するための手段)の方法によって保護するのがよい。
5.7.1.4
予期せぬ起動保護
制御装置の予期せぬ起動保護は,次による。
a) 通常使用の操作方式と他の操作方式とを備える制御盤又は操作盤は,許可を得ている人だけが,アク
セスコード,特殊なツールなどを用いて操作方式を変更できるものとしなければならない。
b) 操作盤及び制御盤操作部の押しボタン,照光式押しボタン,表示灯及び表示器は,JIS B 9960-1:2008
の10.2(押しボタン)〜10.4(照光式押しボタン)を適用する。
c) 遠隔で制御回路を変更することのできる機械式駐車設備は,制御装置の側から許可を得ている人が変
更許可を与えない限り,遠隔では制御回路の変更ができてはならない。
5.7.1.5
制御盤
21
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
制御盤は,次による。
a) 乗降領域に設置する制御盤は,入出庫のための自動車の通過する部分及びその進行方向には配置して
はならない。ただし,配置上避けられない場合には,次のいずれかに適合しなければならない。
1) 自動車が衝突しても,制御盤に有害な(例えば,感電又は予期せぬ起動を引き起こす)変形及び破
損が生じないよう,制御盤を保護するガードを設けるものとする。
2) 自動車が衝突しても,制御盤は有害な変形及び破損が生じない強度とする。
3) 自動車が衝突して制御盤に有害な変形及び破損が生じる前に,制御盤への供給電源を遮断する。
b) 制御盤は,許可を得ている人以外は触れられない場所に設置する,内部機器及び操作部に触れられな
い[例えば,鍵,工具などを用いないときには開かないきょう(筐)体構造とする。],又は鍵などで
操作認証しないときには操作部に触れても起動しないものとする。
c) 制御盤は,扉を開けたときに作動する装置とは干渉しない向き,又は干渉しない距離に設けるものと
する。
5.7.1.6
操作盤
操作盤は,次による。
a) 通常使用の操作盤のうちの主たる操作盤は,前庭又は乗降領域に接し,かつ,乗降領域を可能な限り
広範囲に直接目視できる場所に設置しなければならない。
b) 操作盤は,操作に必要な最小の機器で構成し,内部機器及び操作部に触れられない[例えば,鍵,工
具などを用いないときには開かないきょう(筐)体構造とする。],又は鍵などで操作認証しないとき
には操作部に触れても起動しないものとする。
c) 保守用の操作機器(保守用操作部,保守用非常停止機器など)は,人の押し潰し,巻込み又は切断の
おそれのある場所(例えば,出入口扉のカウンタウェイト脇)には設けてはならない。
5.7.2
通常使用の操作方式
5.7.2.1
自動制御を用いる操作
人が侵入しないように,外囲い(5.4.1参照)を設ける機械式駐車設備は,自動制御を用いてもよい。
なお,一部に単動制御の操作を組み込むものも,自動制御を用いる操作に含むものとする。
5.7.2.2
単動制御を用いる操作
外囲い(5.4.1参照)を設けない機械式駐車設備は,単動制御としなければならない。
5.7.2.3
出入口扉の操作
出入口扉の操作は,次による。
a) 出入口扉の閉作動は,次のいずれかとする。
1) 操作盤で起動する。
2) 前庭に停車した出庫自動車の車内から,乗降領域に人がいないことを監視モニタで視認し,操作認
証機能及び停止制御器をもつケーブルレス操作盤(リモコン)で,無人確認入力器への入力を行っ
た後に,起動する。
b) 出入口扉の開作動は,操作盤又はケーブルレス操作盤(リモコン)での起動に加え,自動制御によっ
て機械式駐車装置と連動してもよい。
5.7.3
作動速度
作動速度は,次による。
a) 出入口扉又は区画扉の作動速度は,次による。
1) 壁の開口部を塞ぐ閉鎖型の扉の作動速度は,300 mm/s以下とする。
22
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2) 開放型などで人の捕捉のおそれのある扉の作動速度は,200 mm/s以下とする。
b) 通常使用を単動制御とする機械式駐車装置では,装置を構成する作動要素の速度は,次による。
1) 昇降搬送装置の昇降速度又は垂直循環装置の循環速度は,150 mm/s以下とする。
2) 水平搬送装置の搬送速度又は水平循環装置の循環速度は,200 mm/s以下とする。
3) 旋回装置の旋回周速度は,200 mm/s以下とする。ただし,旋回周速度は,自動車の外端旋回円又は
旋回床直径の大きい方(最大軌跡円)の周速度とする。
c) 通常使用の操作方式に自動制御を用いる機械式駐車設備で,単動制御を保守作業などのための操作方
式として用いる場合には,b) の単動制御の作動速度を適用するのがよい。
5.7.4
起動及び起動制御
5.7.4.1
無人確認手段
無人確認手段は,次による。
a) 乗降領域に人がいないことを,出入口扉を閉操作する場所から直接の目視又は反射鏡を用いる目視で,
確認できなければならない(附属書F参照)。ただし,死角などによって確認できない場所が生じる
機械式駐車設備では,次のb) 又はc) の確認手段を設けなければならない。
b) 開放型の機械式駐車設備では,乗降領域に人がいないことを確認する手段は,次のいずれかによる。
1) 乗降領域になり得る駐車・搬送領域には,どこが乗降領域になっても,出入口扉を閉操作する場所
からの目視で生じるそれぞれの乗降領域の死角となる部分に対して視認するのに適切な場所(1か
所又は複数箇所)に,利用者が目視した範囲に人のいない確認をしたことを入力する,無人確認入
力器を設けるものとする。
2) 乗降領域になり得る駐車・搬送領域には,どこが乗降領域になっても,それぞれの乗降領域の死角
部分を写すカメラを設けて,その映像を乗降領域又は操作場所の監視モニタで視認できるようにし,
かつ,利用者が監視モニタで人のいない確認をしたことを入力する,無人確認入力器を監視モニタ
又はその近傍に設けるものとする。
c) 閉鎖型の機械式駐車設備では,乗降領域に人がいない確認をする手段は,次のいずれかによる。
1) 出入口扉を閉操作する場所から,乗降領域の死角となる部分を視認するために適切な場所(1か所
又は複数箇所)に,利用者が目視した範囲に人のいない確認をしたことを入力する,無人確認入力
器を設けるものとする。
2) 乗降領域の全ての範囲を写すカメラを設けて,その映像を乗降領域からの退出場所の監視モニタで
視認できるようにし,かつ,利用者が監視モニタで人のいない確認をしたことを入力する,無人確
認入力器を監視モニタ又はその近傍に設けるものとする。
d) 閉鎖型の機械式駐車設備は,出入口扉を閉操作するときに,乗降領域に人がいないことを操作場所で
確認できる,監視モニタを設けなければならない。
なお,操作場所が乗降領域から利用者が退出する場所に位置し,操作場所に監視モニタと無人確認
入力器とを備えたときには,乗降領域から退出する場所の監視モニタ及び無人確認入力器は設けなく
てもよい。
e) 出入口扉を閉操作するときに,乗降領域に人のいないことを確認するための監視モニタは,出入口扉
が閉作動を開始してから一定時間(10秒以上とするのがよい。),乗降領域の映像が映るものとする。
f)
無人確認入力器への入力開始から機械式駐車設備を起動するまでの間に,侵入検知装置(5.7.6.2参照),
扉乗越え検知装置(5.7.6.4参照),乗降領域を区画する検知装置(5.7.6.1参照),又は乗降領域の人存
在検知装置(5.7.6.7参照)が作動した場合は,それまでの入力は全て無効となるものでなければなら
23
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ない。
5.7.4.2
起動許可装置(安全確認ボタン)
起動許可装置は,次による。
a) 自動制御を用いた機械式駐車設備では,通常使用の操作盤又は監視モニタの近傍に,起動許可装置を
設けなければならない。
b) 5.7.4.1のb) 及びc) の無人確認手段とする機械式駐車設備の入庫では,対象となる乗降領域の無人確
認入力器の入力を終えた後にだけ,起動許可装置に入力できるものとする。
c) 5.7.4.1のb) 及びc) の無人確認手段とする機械式駐車設備の出庫は,次のいずれかによる。
1) 出庫車が乗降領域から退場したことによって,出入口扉を閉操作する場所から監視モニタ[5.7.4.1
のb) 2) 又はc) 2) 参照]での乗降領域の視認で,乗降領域に人がいないことを確認できる場合には,
5.7.4.1のb) 及びc) の対象となる乗降領域の無人確認入力器に入力がなくても,起動許可装置に入
力できるものとしてもよい。
2) 出庫車が乗降領域から退場しても,出入口扉を閉操作する場所から乗降領域に死角となる部分が生
じる場合は,対象となる乗降領域の無人確認入力器の入力を終えた後にだけ,起動許可装置に入力
できるものとする。
d) 通常使用の操作では,起動許可装置の入力がない限り,出入口扉は閉起動しない。さらに,乗降領域
を構成する装置は起動しない(例えば,乗降領域を構成しない駐車・搬送領域の水平搬送装置又は昇
降搬送装置は起動してもよいが,昇降搬送装置上の搬器,出入口扉などの乗降領域を構成する装置は
起動してはならない。)。
e) 利用者が取扱者となって使用する機械式駐車設備で,操作盤に無人確認入力器を設ける場合には,無
人確認入力器(5.7.4.1参照)が起動許可装置を兼ねるものとしてもよい。
f)
起動許可装置の入力をするときに,視覚案内又は音声案内によって,乗降領域の無人確認を促すのが
よい。
5.7.4.3
操作認証
操作認証は,次による。
a) 入出庫する自動車及びその利用者に対する機械式駐車設備の一連の操作及び作動は,取扱者が操作盤
で入出庫のための操作を開始するときから,入出庫を終えた後の操作での作動が完了するまでとし,
この間は5.7.4.4 e) の場合を除き,他の利用者が要求する操作を受け付けないものとする。
b) 同じ利用者の要求する作動であることを確実にするため,通常使用での制御装置は,次による。
1) 機械式駐車設備の起動前に,操作盤で利用者,自動車又は搬器の認証登録ができるものとする。
2) 自動車を入出庫した後に,続けて出入口扉の閉作動をするときには,利用者,自動車又は搬器の再
認証を行い,入出庫前の認証登録と一致しないときには,出入口扉は閉作動しないものとする。
c) 一連の操作及び作動において,操作入力の待ち時間が一定時間(10秒程度がよい。)を超えたときに
は,入出庫前の認証登録と一致する再認証をしない限り,操作を継続できないものとする。
5.7.4.4
作動制御
作動制御は,次による。
a) 乗降領域の開口保護 昇降搬送装置又は水平搬送装置の搬器が乗降領域の床面の一部を形成する機械
式駐車設備で,搬器が乗降領域の定常位置にないときに入庫しようとする自動車が2 000 mmを超え
て墜落するおそれのある開口が生じる機械式駐車装置は,次の作動指令があるまでは,搬器などで乗
降領域の開口を塞ぐように,制御しなければならない。
24
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 外囲いのある多横列式の機械式駐車装置 外囲い(5.4.1参照)があり,乗降領域を検知装置で区画
(5.5.1.2参照)する多列式の機械式駐車装置の作動は,次による。
1) 乗降領域を検知装置で区画する多横列の機械式駐車装置では,一つの列の装置だけが昇降する。
2) それぞれの列機を検知装置で区画し,列機ごとに出入口扉を設ける機械式駐車装置では,入出庫の
ために必要な出入口扉だけが作動し,それ以外の出入口扉は全閉を保持する。
c) 外囲いのない多列式の機械式駐車装置 外囲い(5.4.1参照)のない多列式の機械式駐車装置では,隣
接する列機は,入出庫している列機の一連の操作及び作動が完了しない限り,起動してはならない。
d) 前側機と奥側機との間を検知装置で区画する縦列式の機械式駐車装置 前側機と奥側機との間を検
知装置で区画する縦列式の機械式駐車装置[5.5.1.2 c) 参照]では,前側機に入出庫するときには奥側
機は起動しない,又は,奥側機に入出庫するときには前側機は起動しないものとする。
e) 閉鎖型の機械式駐車設備,又は閉鎖型の駐車・搬送領域をもつ機械式駐車設備では,次の作動をして
もよい。ただし,次の1) 又は2) を適用する場合は,出入口扉のある機械式駐車設備では出入口扉が,
出入口扉のない機械式駐車設備では区画扉が,開いてはならない。
1) 駐車・搬送領域を区画する扉が全て全閉している,停止している搬器で搬送路を塞いでいるなど,
外部から人が侵入できない状態にある場合は,駐車・搬送領域の装置だけは,作動してもよい。
2) 乗降領域の入出庫のための一連の作動が完了している,乗降領域を構成する全ての扉が全閉してい
る,及び乗降領域の人存在検知装置が作動していない状態にある場合は,乗降領域を構成する装置
は,入出庫のための作動をしてもよい。
5.7.5
停止
5.7.5.1
乗降領域の床を構成する装置の停止
搬器,可動床などの乗降領域の床を構成する装置をもつ乗降領域のピット深さが500 mmを超える機械
式駐車装置の場合,乗降領域の床を構成する位置に搬器,可動床などを停止するための位置の検知は,定
常位置で停止するための検知装置のほかにバックアップを設け,入庫する自動車又は利用者が乗降領域の
床面から墜落するのを保護する。バックアップは,複数の検知装置を設ける,定常位置で停止するための
検知装置と停止制御のソフトウェアとを組み合わせるなどによる。
5.7.5.2
非常停止
非常停止は,次による。
a) 操作盤には,取扱者が操作するための非常停止機器を備えなければならない。
なお,ケーブルレス操作盤(リモコン)には,非常停止機器に代えて停止制御器を設けるものとす
る。
b) 閉鎖型の機械式駐車設備又は閉鎖型の駐車・搬送領域をもつ機械式駐車設備では,乗降領域を構成す
る装置が作動しても直接危害を受けるおそれのない,自動車の両側方又は退避場所に,非常停止機器
を設けるのがよい。
さらに,可能な場合は,自動車の前後方向にも非常停止機器を設けるのがよい。
c) 外囲いのある開放型の多列式駐車設備では,操作盤の非常停止機器に加え,前庭から操作できる場所
に,独立の非常停止機器を設けるのがよい。
d) 非常停止機器は,電気的・機械的構造について,JIS C 8201-5-5のボタン式非常停止機器によるもの
とし,アクチュエータの色は赤,アクチュエータの背景色は黄とする。
なお,ケーブルレス操作盤(リモコン)の停止制御器は,一つの操作で停止するものとし,非常停
止を示すマーキング又はラベル付けをしてはならない。
25
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
e) 機械式駐車設備の作動中に非常停止機器,ケーブルレス操作盤(リモコン)の停止制御器及び次の検
知装置が作動した(扉閉検知装置では閉検知が不作動となった)ときには,対象とする装置は,JIS B
9703:2011の4.1.4の非常停止機能の停止カテゴリ0又は停止カテゴリ1で,停止しなければならない。
1) 乗降領域を区画する検知装置(5.7.6.1参照)
2) 出入口扉の扉乗越え検知装置[5.7.6.4 a) 参照]
3) 区画扉の扉乗越え検知装置[5.7.6.4 b) 参照]
4) 出入口扉の扉閉検知装置[5.7.6.5 a) 参照]
5) 区画扉の扉閉検知装置[5.7.6.5 b) 参照]
6) 通路扉,非常用扉及び作業用扉,並びに避難口ハッチの扉閉検知装置[5.7.6.5 c)〜e) 参照]
7) 衝突保護装置[5.7.8 a) 参照]
8) 行過ぎ制限装置[5.7.8 b) 参照]
9) 地震時自動停止装置[5.7.8 c) 参照]
5.7.5.3
復旧及び再起動
復旧及び再起動は,次による。
a) 機械式駐車装置を構成する装置が定常位置に停止していないときは,許可を得ている人だけが出入口
扉,非常用扉,通路扉などから機械式駐車設備の内部に入り,操作方式の変更又はインタロックを無
効化できるものとする。
b) 非常停止制御[5.7.5.2 e) 参照]で停止した後の復旧は,許可を得ている人だけができるものとする。
c) 非常停止機器の手動リセットによって,再起動してはならない。
d) 機械式駐車装置は,全ての非常停止指令を解除するまで,再起動が可能になってはならない。
e) 安全機能及び/又は保護方策(例えば,インタロック)の一部を解除してからの起動は,通常使用以
外の所定の操作方式(例えば,保守操作)で,許可を得ている人だけができるものとする。
f)
機械式駐車設備の一連の操作[5.7.4.3 a) 参照]又は一連の操作に伴う装置の作動が完了しない場合,
通常使用のための復旧は,許可を得ている人だけができるものとする。
5.7.6
検知装置及びインタロック
5.7.6.1
乗降領域を区画する検知装置
乗降領域を区画する検知装置は,次による。
a) 乗降領域を検知装置で区画する機械式駐車設備(5.5.1.2参照)の乗降領域と駐車・搬送領域とを区画
する検知装置は,次による。
1) 機械式駐車装置が停止しているときに,この乗降領域を区画する検知装置が作動した場合は,機械
式駐車装置は起動してはならない。
2) 機械式駐車装置が作動しているときに,この乗降領域を区画する検知装置が作動した場合は,機械
式駐車装置は非常停止しなければならない。
b) 区画扉を設けなくてもよいとする縦列式の機械式駐車設備の区画扉に代えて設ける,乗降領域を区画
する検知装置[5.5.1.2 c) 参照]は,次による。
1) 奥側機が停止しているときに,区画扉に代えて設ける,乗降領域を区画する検知装置が作動した場
合は,奥側機は起動してはならない。
2) 奥側機が作動しているときに,区画扉に代えて設ける,乗降領域を区画する検知装置が作動した場
合は,奥側機は非常停止しなければならない。
c) 出入口扉を設けなくてもよいとするバース式の機械式駐車設備の出入口扉に代えて設ける,乗降領域
26
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を区画する検知装置[5.5.1.1 f) 参照]は,次による。
1) 区画扉が全閉で停止しているときに,出入口扉に代えて設ける,乗降領域を区画する検知装置が作
動した場合には,区画扉は開起動してはならない。
2) 区画扉が作動している又は全開のときに,出入口扉に代えて設ける,乗降領域を区画する検知装置
が作動した場合は,乗降領域を構成する装置及び乗降領域に接する駐車・搬送領域の装置は非常停
止しなければならない。
5.7.6.2
侵入検知装置
侵入検知装置は,次による。
a) 無人確認入力器への入力開始から機械式駐車設備を起動するまでの間に,開いている出入口扉又は区
画扉から,乗降領域又は駐車・搬送領域に侵入する人を検知する,侵入検知装置を設けなければなら
ない[5.7.4.1 f) 参照]。
b) 出入口扉及び区画扉の侵入検知装置は,5.7.6.3の扉閉保護装置を兼ねてもよい。この場合の侵入検知
装置は,出入口扉及び区画扉が停止しているときには侵入検知装置として,出入口扉及び区画扉が作
動しているときには扉閉保護装置としての機能をもつものとする。
5.7.6.3
扉閉保護装置
上方開き又は水平開きの出入口扉及び区画扉では,人又は自動車が挟まれないように,人又は自動車を
検知して反転する扉閉保護装置を備えなければならない。また,下方開きの出入口扉及び区画扉では,人
又は自動車を突き上げないように,人又は自動車を検知して停止又は反転する扉閉保護装置を備えなけれ
ばならない。
5.7.6.4
扉乗越え検知装置
出入口扉又は区画扉の,5.5.1.1 b) 及び5.5.1.2 b) の規定によって備える扉乗越え検知装置は,次による。
a) 出入口扉の扉乗越え検知装置は,次による。
1) 機械式駐車装置が停止しているときに,出入口扉の扉乗越え検知装置が作動した場合は,出入口扉
は起動してもよいが,機械式駐車装置は起動してはならない。
2) 出入口扉が作動しているときに,出入口扉の扉乗越え検知装置が作動した場合は,出入口扉は停止
しなければならない。
3) 機械式駐車装置が作動しているときに,出入口扉の扉乗越え検知装置が作動した場合は,機械式駐
車装置は非常停止しなければならない。
b) 縦列式の機械式駐車設備の区画扉の扉乗越え検知装置は,次による。
1) 奥側機が停止しているときに,区画扉の扉乗越え検知装置が作動した場合は,区画扉は起動しても
よいが,奥側機は起動してはならない。
2) 区画扉が作動しているときに,区画扉の扉乗越え検知装置が作動した場合は,区画扉は停止しなけ
ればならない。
3) 奥側機が作動しているときに,区画扉の扉乗越え検知装置が作動した場合は,奥側機は非常停止し
なければならない。
5.7.6.5
扉閉検知装置
次の扉及び避難口ハッチには,扉などが全閉したときに作動する扉閉検知装置を設けなければならない。
a) 出入口扉
b) 区画扉
c) 乗降領域と外部との間の通路扉,非常用扉又は避難口ハッチ
27
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 乗降領域と駐車・搬送領域との間の作業用扉又は避難口ハッチ
e) 駐車・搬送領域と外部との間の非常用扉又は避難口ハッチ
5.7.6.6
インタロック
インタロックは,次による。
a) 機械式駐車装置と扉などとの,インタロックは,次による。
1) 乗降領域を区画する扉(出入口扉,区画扉,通路扉,非常用扉又は避難口ハッチ)の全てが全閉(扉
閉検知装置が作動)になっていないときには,乗降領域を構成する装置は起動してはならない。
2) 乗降領域を構成する装置が入出庫のための定常位置に停止していないときは,入出庫のたびに開閉
する出入口扉,区画扉,通路扉などは,開起動してはならない。また,入出庫のとき以外は,これ
らの扉は全閉(扉閉検知装置が作動)でなければならない。
3) 駐車・搬送領域を構成する装置は,駐車・搬送領域を区画する扉(区画扉,非常用扉又は避難口ハ
ッチ)の全てが全閉(扉閉検知装置が作動)している,又は停止している搬器で搬送路を塞いでい
るなどによって,外部から人が侵入できない状態にある装置を除き,起動してはならない。
b) 複数の出入口扉を設ける乗降領域,又は複数の乗降領域の機械式駐車設備のインタロックは,次によ
る。
1) 一つの乗降領域に二つの出入口扉を設けて,二つともが開作動する(例えば,通り抜けの乗降領域
の)ときは,取扱者のいる側の出入口扉が全開した後に,取扱者のいない側の出入口扉が開くもの
とする。
2) 一つの乗降領域に二つの出入口扉を設けて,二つともが閉作動する(例えば,通り抜けの乗降領域
の)ときは,取扱者のいない側の出入口扉が全閉した後に,取扱者のいる側の出入口扉が閉じるも
のとする。
3) 一つの乗降領域に二つの出入口扉を設けて,いずれかの一つが作動するときは,乗降領域を構成す
る装置の停止位置と一致した方向の出入口扉だけ作動するものとし,他の出入口扉は作動してはな
らない。
4) 一つの機械式駐車装置で複数階に乗降領域を設けた場合は,乗降領域を構成する装置が定常位置に
停止している階と一致した出入口扉だけが作動するものとする。
c) 縦列式の機械式駐車設備での乗降領域のインタロックは,次による。
1) 前側機に入出庫するときは,区画扉が全閉で,かつ,区画扉は開作動してはならない。
2) 奥側機に入出庫するとき以外は,区画扉は全閉(扉閉検知装置が作動)とする。
3) 区画扉が全閉でない(扉閉検知装置が作動していない)ときは,奥側機は作動してはならない。
4) 奥側機に入出庫するときは,前側機は作動しない,又は乗降領域に前側機の搬器などが降下して乗
降領域を侵さないように,乗降領域への降下保護装置(5.5.4参照)によって,作動を制限しなけれ
ばならない。
d) バース式の機械式駐車設備での乗降領域のインタロックは,次による。
1) 出入口扉と区画扉とがある機械式駐車装置では,出入口扉が全閉でない(扉閉検知装置が作動して
いない)ときは,区画扉が開かないものとする。
2) 出入口扉と区画扉とがある機械式駐車装置では,区画扉が閉じていて,乗降領域を構成する装置が
入出庫のための定常位置に停止していなければ,出入口扉が開かないものとする。
3) 出入口扉と区画扉とがある機械式駐車装置では,出入口扉が閉じていないときは,乗降領域を構成
する装置は入出庫のための作動をしないものとする。
28
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4) 出入口扉がなく区画扉のある機械式駐車装置では,乗降領域を構成する装置が入出庫のための定常
位置に停止し,かつ,乗降領域の人存在検知装置(5.7.6.7参照)が作動していない(乗降領域に人
がいない)ときに,区画扉が開くものとする。
5) 出入口扉がなく区画扉のある機械式駐車装置では,乗降領域の人存在検知装置(5.7.6.7参照)が作
動していない(乗降領域に人がいない)ときに,乗降領域を構成する装置が入出庫のための作動を
するものとする。
5.7.6.7
乗降領域の人存在検知装置(人感センサ)
乗降領域の人存在検知装置は,次による。
a) 自動制御の機械式駐車設備の乗降領域には,人存在検知装置を設けなければならない。ただし,次の
全てに該当する機械式駐車設備では,人存在検知装置を設けなくてもよい。
1) 機械式駐車装置を構成する装置の作動速度が,単動制御の作動速度[5.7.3 b) 参照]を超えないも
のとする。
2) 開放型の機械式駐車設備の規模は,操作盤を中央とした場合に,縦が1列ならば8横列まで,縦が
2列なら6横列までとする。
b) 乗降領域の人存在検知装置は,出入口扉が閉起動する又は出入口扉のないバース式では区画扉が開起
動する直前まで,人を検知しなければならない[5.7.4.1 f) 参照]。
5.7.7
自動車の停車位置規制
5.7.7.1
自動車の停車位置規制装置
格納する自動車が制限を超えていない,又は停車位置が許容範囲を超えていないことを確実にするため,
車長(はみ出し)検知装置及び車幅(はみ出し)検知装置を設けなければならない。ただし,次のa) 又
はb) に該当するものは,その検知装置を設けなくてもよい。
a) 開放型の機械式駐車設備で次を全て満たすものは,車長(はみ出し)検知装置に代えて,入庫の進入
方向奥側に,自動車の車体端で停車位置を規制する移動抑制装置,又は乗越えを抑止する高さのタイ
ヤ止めを設け,自動車のはみ出しを規制する方法としてもよい。
1) 取扱者が乗降領域及び駐車・搬送領域を操作場所から目視できる。
2) 機械式駐車装置の作動速度が単動制御での作動速度[5.7.3 b) 参照]を超えない。
3) 利用者及び取扱者が,入庫自動車の停車位置又は搬器からのはみ出しを視認できる。
b) 次のいずれかを満たすものは,車幅(はみ出し)検知装置を設けなくてもよい。
1) 搬器の両側方の搬器を支持するつり枠,柱,チェーンなどで,自動車のはみ出しを制限する。
2) 搬器の両側方に自動車がはみ出さないように,ガード(搬送のときの幅の許容範囲を超えないよう
に,自動車のドア開を制限する装置をガードとしてもよい。)を設けている。
3) 開放型の機械式駐車設備で,搬器の両側方に自動車のはみ出しを制限する高さ75 mm以上の縁石を
設け,更にa) の1)〜3) の全てを満たしている。
c) 車長(はみ出し)検知装置は,次による。
1) 車長(はみ出し)検知装置は,自動車の長さを直接検知する方法か,又は停車位置の許容範囲を超
えていないことを検知する方法のいずれでもよい。
2) 車長(はみ出し)検知装置が作動しているときには機械式駐車装置が起動しない,また,搬送を開
始した後に車長(はみ出し)検知装置が作動したときには機械式駐車装置は作動を停止するものと
する。
3) 入庫の進入方向奥側に,自動車の車体端で停車位置を規制する移動抑制装置を設けた機械式駐車装
29
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
置では,奥側の車長(はみ出し)検知装置は設けなくてもよい。
d) 車幅(はみ出し)検知装置は,次による。
1) 車幅(はみ出し)検知装置は,自動車の幅を直接検知する方法か,又は停車位置の許容範囲を超え
ていないことを検知する方法のいずれでもよい。
2) 車幅(はみ出し)検知装置が作動しているときには,機械式駐車装置が起動しない,また,搬送を
開始した後に車幅(はみ出し)検知装置が作動したときには,機械式駐車装置は作動を停止するも
のとする。
5.7.7.2
すみ切り制限装置
電気式(例えば,能動的光電保護装置)のすみ切り制限装置は,これが作動したときに自動車を搬送又
は格納しないものとする。
5.7.8
機械式駐車装置及び自動車の保護装置
機械式駐車装置及び自動車の保護装置は,次による。
a) 衝突保護装置 自動制御の機械式駐車装置の昇降搬送装置,水平搬送装置などによって,搬器又は自
動車を搬送するときに,他の搬送領域の搬器などと衝突(例えば,搬器を昇降搬送装置に横行搬送し
ようとしたときに昇降搬送装置にも搬器がある。)しないように,制御装置にはインタロック機能を設
けなければならない。
なお,次を全て満たす機械式駐車装置では,インタロック機能を設けなくてもよい。
1) 取扱者が乗降領域及び駐車・搬送領域で作動する搬送装置の状況を,操作場所から目視できるもの
とする。
2) 機械式駐車装置の作動速度が単動制御の作動速度[5.7.3 b) 参照]を超えないものとする。
b) 行過ぎ制限装置 行過ぎ制限装置は,次による。
1) 往復運動する装置(例えば,昇降搬送装置,水平搬送装置など)の不具合によって搬器が定常位置
に停止しない場合に,搬送路端から搬器又は自動車が落下する,又は搬送路端部に自動車が衝突す
る可能性のある装置は,行過ぎ制限装置を設けなければならない。
2) 不具合によって扉体が定常位置に停止しない場合に,チェーン又はロープの外れ,又は過大な張力
によってのチェーン,ロープの切断などで,扉体が落下する可能性のある上方開きの出入口扉及び
区画扉は,行過ぎ制限装置を設けなければならない。
3) 昇降搬送装置,水平搬送装置,出入口扉及び区画扉のうち,搬器,出入口扉などが不具合によって
定常位置に停止しない場合でも,人への危害及び/又は自動車の損傷の可能性の低いものは,行過
ぎ制限装置に代えて,機械式終端装置(エンドストッパ)を用いてもよい。
c) 地震時自動停止装置 地表面からの高さが45 mを超える機械式駐車設備は,地震の大きさによって
機械式駐車装置を自動停止するために,次の事項を満たす地震感知装置を備えなければならない。
1) 地震感知器は,水平全方向加速度感知又はP波感知のもの。
2) 地震感知器が作動する加速度は,設置場所に応じて機械式駐車設備を保護するのに適切な値(80〜
200 Galとするのがよい。)に調整できる。
5.8
照明及び照度
5.8.1
前庭及び乗降領域
前庭及び乗降領域の照明及び照度は,次による。
a) 照度 前庭及び乗降領域は,屋内では平均照度50 lx(照度範囲は30〜75 lxとするのがよい。)以上と
し,屋外では平均照度20 lx(照度範囲は10〜30 lxとするのがよい。)以上とする〔JIS Z 9110:2011の
30
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表18[住宅その2(共同住宅の共用部分)]の“車庫”を参照〕。
b) 自動点灯照明 照明を自動点灯式とする場合は,出入口扉が開く前に自動点灯し,出入口扉が閉じた
後は一定時間(60秒以上とするのがよい。)経過した後に自動消灯するものとする。
5.8.2
駐車・搬送領域
駐車・搬送領域の照明及び照度は,次による。
a) 人が乗降領域から接する駐車・搬送領域に移動できる機械式駐車設備では,乗降領域の搬器上面と同
じ高さの駐車・搬送領域に限り,乗降領域と同等の照度(屋内では平均照度50 lx,屋外では平均照度
20 lx)にしなければならない。
b) 保守作業のために,駐車・搬送領域は,平均10 lx程度の照度とする。
c) 保守作業をする場所の照度が部分的に不足する場合は,部分照明を設ける,又は作業用照明灯の電源
とするためのコンセントを設けるものとする。
5.8.3
操作盤
操作盤の照明及び照度は,次による。
a) 操作盤の表示部及び操作部は,平均照度20 lx(照度範囲は,10〜30 lxとするのがよい。)以上にしな
ければならない。
b) 局部的な照度不足で盤面,ラベル文字などが判読しづらい場合は,部分照明を併用して視認性を維持
しなければならない。
5.8.4
非定常状態
閉鎖型の機械式駐車設備において,乗降領域を構成する装置が定常位置に停止していないときに,人が
墜落するおそれのある高さが床面から1 000 mmを超える場所では,開口部を確実に視認できるように,
照明は次による。
a) 非常用扉,通路扉又は出入口扉を開けたときに,乗降領域の照明は自動点灯するものとする。
b) 乗降領域の非常用扉,通路扉又は出入口扉の側方に設けた消灯用スイッチで消灯する,又は乗降領域
を構成する装置を通常使用の位置に戻し,更に通常使用の操作方式(自動制御)に切り替えた後に,
一定時間(60秒以上とするのがよい。)経過して自動消灯する照明とする。
c) 駐車・搬送領域内の照明用スイッチは,保守で機械式駐車設備に出入りするために常用する扉脇に設
けるのがよい。
5.9
視覚シグナル及び聴覚シグナル
a) 入庫許可表示装置 搬器及び出入口扉が定常位置に停止している入庫可能な状態を視覚で認識できる
ように,前庭から見やすい場所に入庫許可灯(例えば,赤・青信号灯,青の回転灯又は点滅灯)を設
けるのがよい。
b) 入庫案内表示装置 入庫案内表示装置は,次による。
1) 縁石のない搬器を用いた機械式駐車装置で,自動車の通過部分の幅に車幅+500 mm未満の狭あい
部が含まれるものは,入庫での正しい停車位置へ自動車を誘導,車長の制限の超過,車幅の制限の
超過などを利用者に視覚及び/又は聴覚で案内する装置(例えば,前進,後退,右寄過ぎ,左寄過
ぎ,停止などを案内する表示灯又は音声案内装置)を設けなければならない。
2) 縁石のある搬器を用いた機械式駐車装置であっても,自動車の通過部分の幅に車幅+500 mm未満
の狭あい部が含まれる場合は,利用者に視覚及び/又は聴覚で案内する装置を設けるのがよい。
3) 車幅(はみ出し)検知装置が作動した場合に,利用者及び取扱者に音声及び/又は視覚で警報する
装置を設けるのがよい。
31
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 作動警報装置 出入口扉が作動中であることを聴覚及び/又は視覚で注意喚起する装置を設けるのが
よい。
d) 昇降台移動警報装置 昇降搬送装置の昇降台,又は昇降搬送路の上端付近,下端付近及びその間の距
離10 m程度に対して一つの割合に,黄又は赤の回転灯又は点滅灯,及び音声警報装置を設ける。こ
れらの警報装置は,建設作業又は保守作業で昇降搬送装置が作動するときに,作動しなければならな
い。
e) カウンタウェイト移動警報装置 カウンタウェイト移動警報装置は,次による。
1) 昇降搬送装置のカウンタウェイト,又はカウンタウェイト昇降路の上端付近,下端付近及びその間
の距離10 m程度に対して一つの割合に,黄又は赤の回転灯又は点滅灯,及び音声警報装置を設け
る。これらの警報装置は,建設作業又は保守作業でカウンタウェイトが作動するときに,作動しな
ければならない。
なお,昇降搬送路とカウンタウェイト昇降路とが近接している場合には,いずれか一方の昇降(搬
送)路だけに移動警報装置を設けてもよい。
2) カウンタウェイト下部には,下降接近を認識できるよう,長さ2 000 mm以上の樹脂製の鎖又は繊
維製の索を取り付けなければならない。
5.10
通信アンテナ
携帯端末などの通信電波が届かない駐車領域では,自動車に乗車したまま駐車室に格納された人が救助
を求められるように,通信アンテナを備えるのがよい。
6
安全要求事項及び/又は安全方策の検証
製造業者は,機械式駐車設備がこの規格の安全要求事項及び安全方策を満たしていることを,次のいず
れか一つ又はこれらの組合せによって,検証しなければならない。
a) 設計及び計算確認
b) 目視による検査
c) 試験及び計測
d) 運転
7
工事及び使用のための情報並びに表示及び標識
7.1
工事のための情報
製造業者が機械式駐車設備の設計及び施工の全てを行わない場合には,設計及び施工の関係先が必要と
する設計及び施工に関する情報を提供する。
なお,必要とする情報の例を次に示すが,設計及び施工の関係先と協議して決定するのがよい。
a) 機械式駐車装置の荷重,トルクなど,強度及び安定性の確保に必要な外力に関する事項
b) 機械式駐車装置の構成部材などの搬入方法及び保管に関する事項
c) 機械式駐車装置の周囲に必要な作業空間,周囲の柵などに関する事項
d) 作業場所の照明・照度,換気,排水などの環境に関する事項
e) 仮設及び常設電源の種別,容量などの電源供給に関する事項
7.2
使用のための情報(取扱説明書)
7.2.1
一般事項
一般事項は,次による。
32
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 機械式駐車設備の“意図する使用”について,その対象とする人(管理責任者,取扱者,利用者など)
に対して情報提供するのがよい。
b) 使用上の情報は,安全で,かつ,正しい機械式駐車設備の使用を確実にするために必要な全ての指示
事項を含むものとする。
c) 提供する情報には,残留リスクの通知及び警告を含むものとする。
d) “意図する使用”以外の方法での,合理的に予見可能な誤使用に対しても考慮する。
e) 取扱説明書は“意図する使用”において,次の事項を含む内容を記載する。
1) 対象とする自動車の車重,寸法,車体形状など
2) 利用方法,操作方法,利用者の制限など
3) 風,地震,雪,雨,湿度など環境条件
4) 権限のない人に対する禁止事項の情報
5) 管理(運営及び維持管理)規則を制定すること,及び管理責任者を置くことの必要性
f)
取扱者になるために訓練が必要な機械式駐車設備では,訓練に必要な情報を提供する。
7.2.2
操作説明
操作説明は,主に取扱者を対象とした機械式駐車設備の操作及び利用者に提供する情報。これには,次
の情報を含む。
a) 機械式駐車設備の形式,仕様及び諸元
b) 駐車する自動車の車重,寸法,車体形状など
c) 乗降領域への閉じ込めの危険,並びに一時的な退避,非常停止及び非常脱出の手段
d) 利用者への意図した利用方法,残存リスクへの注意及び警告などの次に示す情報提供
1) 入出庫の自動車運転の通過部分の幅,アクセル・ブレーキの踏み間違いなどの注意又は警告
2) 入庫後の停車位置の確認,駐車ブレーキの作動,外部後写鏡の格納などの作業
3) 入出庫後に乗降領域に人がいないのを確認する手順
4) 乗降領域にある危険領域
5) 非常停止の方法
6) 出入口扉など,接触のおそれのある危険源
7) 地震が発生したときのとるべき行動
e) 次に示す操作の手順
1) 通常使用の操作方法及び手順
2) 取扱者に通常使用以外の操作権限を与える場合の,通常使用以外の操作方法及び手順
3) 非常停止を含む停止の方法
4) 取扱者に異常復旧の権限を与える場合の,権限範囲の事象に限定した異常復旧の手順
f)
製造業者又は保守会社の緊急連絡先
7.2.3
保守点検
保全(点検及び維持管理に必要な保守)に関しての情報で,次の情報を含むものがよい。
a) 保守員(保守作業の要員) 保守作業員が機械式駐車設備及びその構成製品に対しての技術知識及び技
量をもつ必要性。
b) 定期点検 定期点検は,次によって実施する。
1) 定期点検の周期及び点検内容
2) 保全に必要な交換部品,潤滑油などの交換の目安
33
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3
表示及び標識
7.3.1
駐車可能な自動車の表示
機械式駐車設備の出入口付近の見やすい場所に,次の事項を含む駐車可能な自動車の制限を表示する。
a) 自動車の車重及び寸法の制限
b) 自動車の形状などによる,例えば,すみ切り,最低地上高,外部附属物などの制限
7.3.2
利用者への注意事項の表示
機械式駐車設備の前庭,待合場所などに,利用者に対して次の事項を含む注意事項を表示する。
a) 注意(危険)事項
1) 自動車の運転を誤った場合の危険
2) 乗降領域の無人確認が不確実な場合の危険
3) 機械式駐車設備の周囲及び乗降領域で,同乗者が危険源に接近することの危険
4) 歩行に関する危険
b) 説明事項
1) 利用者が行う入出庫の作業手順
2) 退避場所,非常口及び非常停止に関する説明
7.3.3
取扱者への注意事項の表示
操作盤脇などの操作するときに見やすい場所に,取扱者に対して次の事項を含む注意事項を表示する。
a) 注意(危険)事項
1) 乗降領域の無人確認が不確実な場合の危険
2) 操作場所を離れる場合の危険
3) 外部者が危険源に接近することの危険
b) 説明事項 非常停止に関する説明
7.3.4
緊急連絡先の表示
機械式駐車設備に製造業者又は保守会社の緊急連絡先を表示する。
7.3.5
機械式駐車設備へのマーキング及び標識(絵文字)
人を安全側に誘導するための機械式駐車設備へのマーキング及び標識(絵文字)は,次による。
a) 作動速度が単動制御の作動速度[5.7.3 b) 参照]を超えない開放型の機械式駐車設備を除き,人が直
ちに認識できるように次の両方又はいずれかを,乗降領域の床面にマーキングしなければならない。
1) 乗降領域の装置が作動したときに,接触などの直接の危害を避けるための退避場所を,床面にマー
キングする。
2) 装置又は自動車が可動するときの最大外縁(危険境界)を,危険領域として床面にマーキングする。
b) 人の通路となる床,又は人の歩行が想定できる場所のマーキングは,次による。
1) 乗降領域で人の歩行が想定できる部分の隙間が40 mmを超えるときは,注意を促すマーキングを隙
間端部にする。
2) 乗降領域で人の歩行が想定できる部分の段差及び凹凸が20 mmを超えるときは,注意を促すマーキ
ングを段差及び凹凸部分にする。
3) 搬器床面からの高さが25 mmを超えるタイヤ止めには,タイヤ止めに注意を促すマーキングをす
る。
c) 取り残された人の脱出経路となる非常用扉,作業用扉,避難口ハッチなどには,脱出経路があること
を認識できる場所に,標識(絵文字)又は文字で脱出口を表示する。
34
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 自動車の通過部分の幅が車幅+500 mm未満の狭あい部分では,入出庫で自動車の側方に注意する自
動車運転を促すために,狭あい部分にマーキングをする。
e) 危険領域及び退避場所のマーキングがない機械式駐車設備,又は危険領域及び退避場所のマーキング
を誤認するおそれが小さい場所には,床面に人の歩行又は自動車の運転でのリスクを低減するのに有
効な,次のいずれか又は複数をマーキングするのがよい。
1) 利用者が入退場するための乗降領域の通路部分を床面にマーキングする。
2) 人の立入りを制限する部分を床面にマーキングする。
3) 自動車を搬器の幅の中に正しく誘導するための,入庫する自動車の通過部分を床面にマーキングす
る。
4) 入庫する自動車が搬器の幅方向に片寄りするおそれのある搬器では,許容する車幅を搬器上面にマ
ーキングする。
5) 入庫する自動車が搬器の幅方向に片寄りするおそれのある搬器では,確保しなければならない人の
通路の幅を搬器上面にマーキングする。
f)
上記のa)〜e) のマーキング,標識(絵文字)及び表示の説明を表示する。
35
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
機械式駐車場,機械式駐車設備及び機械式駐車装置の概念図
A.1 機械式駐車場,機械式駐車設備及び機械式駐車装置の概念図
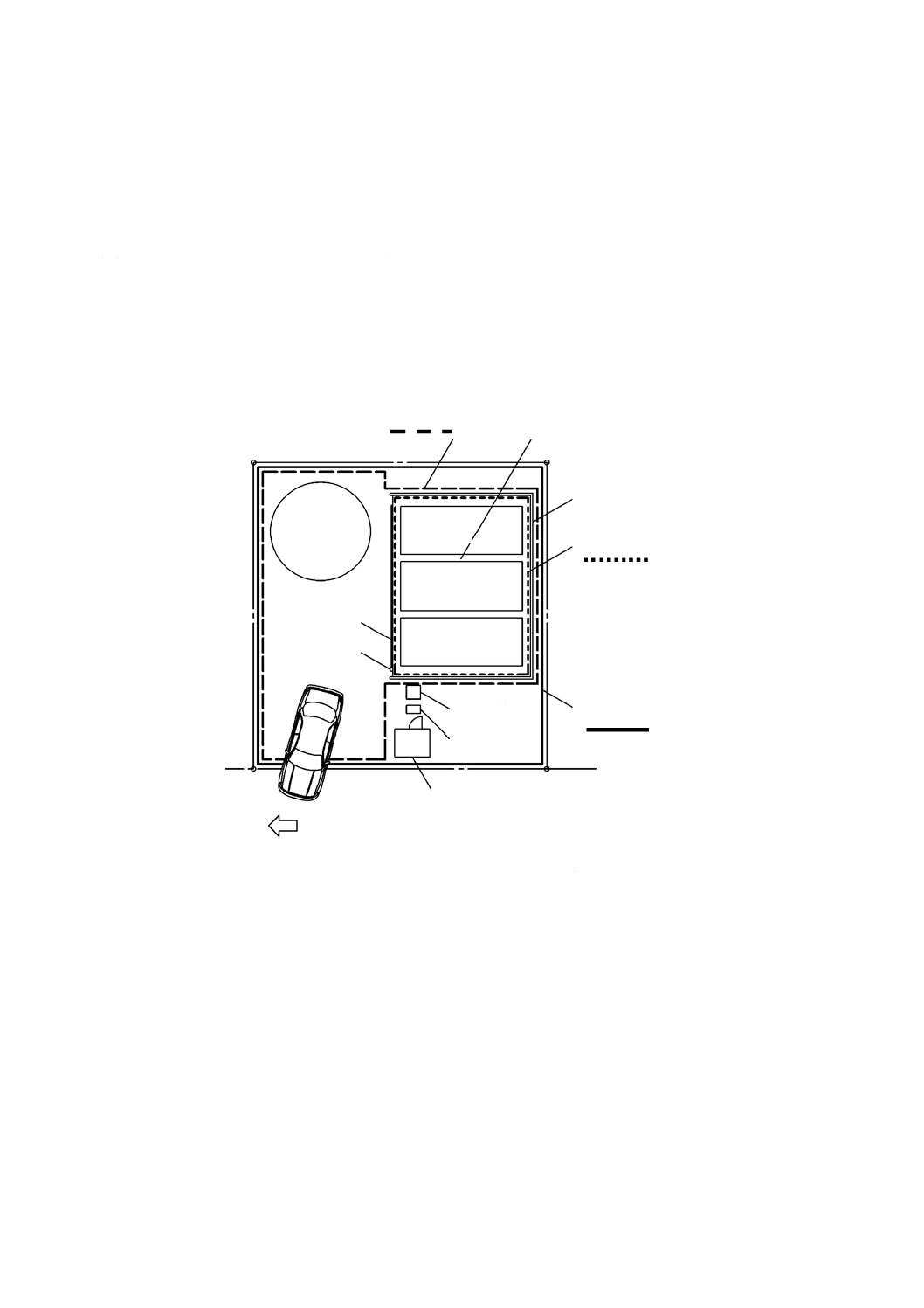
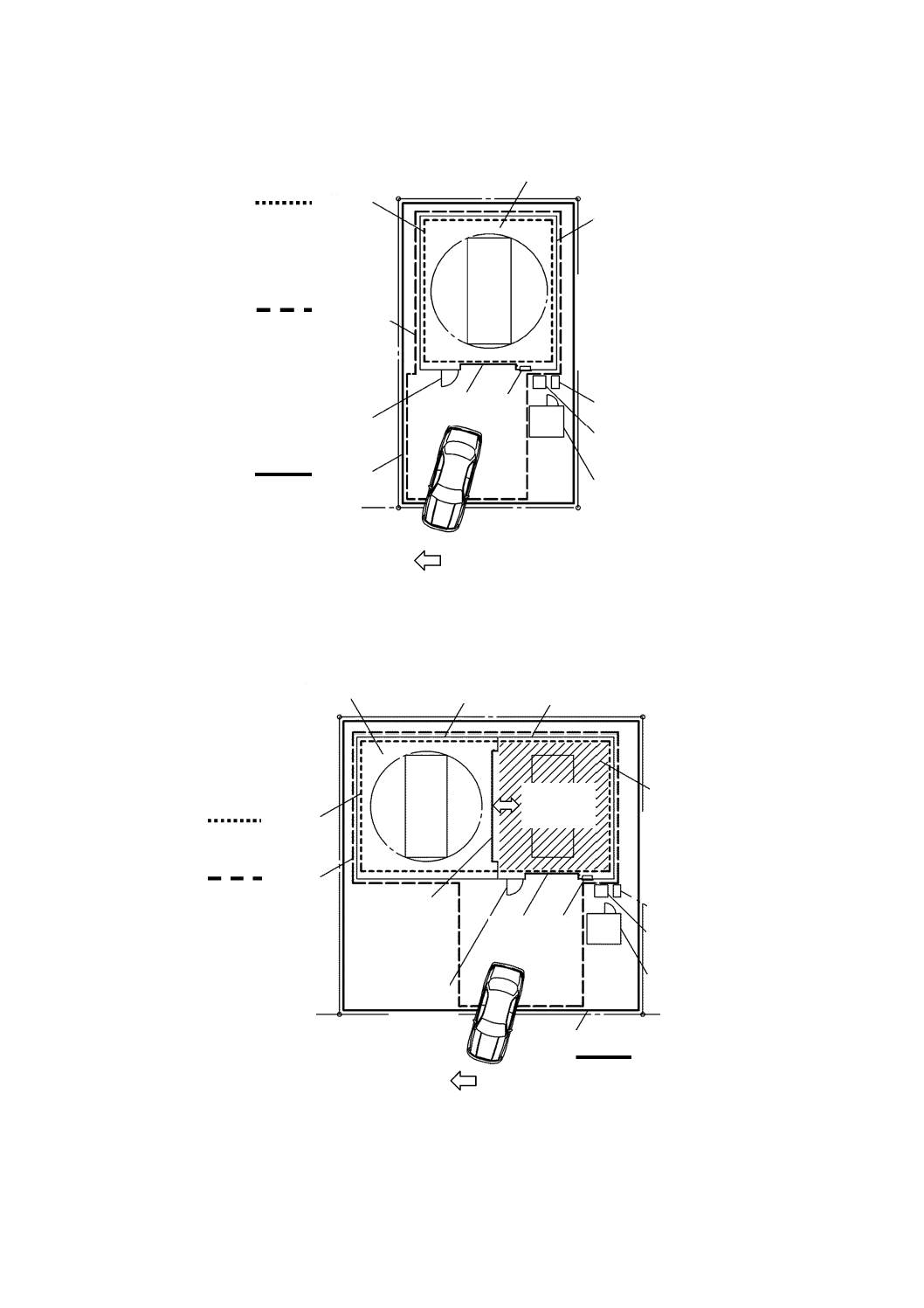
昇降横行式の機械式駐車場,機械式駐車設備及び機械式駐車装置の場合の概念図を図A.1に,エレベー
タ方式の機械式駐車場,機械式駐車設備及び機械式駐車装置の場合の概念図を図A.2に,バース式の機械
式駐車場,機械式駐車設備及び機械式駐車装置の場合の概念図を図A.3に示す。
隣地境界線
隣地境界線
隣
地
境
界
線
隣
地
境
界
線
方向転換装置
外囲い
(出入口扉)
操作盤
前庭
料金精算機
発券機
管理室
駐車・搬送領域
乗降領域
外囲い
(固定の囲い)
機械式駐車場
(
の範囲)
機械式駐車設備
(
の範囲)
機械式駐車装置
(
の範囲)
搬器
搬器
搬器
道路
図A.1−昇降横行式の機械式駐車場,機械式駐車設備及び機械式駐車装置の概念図
36
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
駐車・搬送領域
乗降領域
機械式駐車装置
(
の範囲)
外囲い
(固定の囲い)
機械式駐車設備
(
の範囲)
料金精算機
発券機
管理室
操作盤
外囲い
(出入口扉)
外囲い
(非常用扉)
機械式駐車場
(
の範囲)
前庭
搬器
道路
隣地境界線
隣地境界線
隣
地
境
界
線
隣
地
境
界
線
図A.2−エレベータ方式の機械式駐車場,機械式駐車設備及び機械式駐車装置の概念図
道路
機械式駐車場
(
の範囲)
管理室
料金精算機
発券機
乗降領域
(斜線部)
駐車・搬送領域
外囲い
(固定の囲い)
外囲い
(固定の囲い)
機械式駐車装置
(
の範囲)
外囲い
(出入口扉)
操作盤
前庭
外囲い
(非常用扉)
機械式駐車設備
(
の範囲)
外囲い
(区画扉)
搬器
水平
搬送装置
隣地境界線
隣
地
境
界
線
隣地境界線
隣
地
境
界
線
図A.3−バース式の機械式駐車場,機械式駐車設備及び機械式駐車装置の概念図
37
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
代表的な機械式駐車装置
B.1
代表的な機械式駐車装置
機械式駐車設備は,構成する装置の組合せ,機械式駐車装置の外囲いの有無又は構造,乗降領域の区画
方法などによって多様な方式が存在する。この規格は,代表的な機械式駐車設備を対象にリスクアセスメ
ントを行い,その結果に基づき安全要求事項について規定している。リスクアセスメントの対象とした代
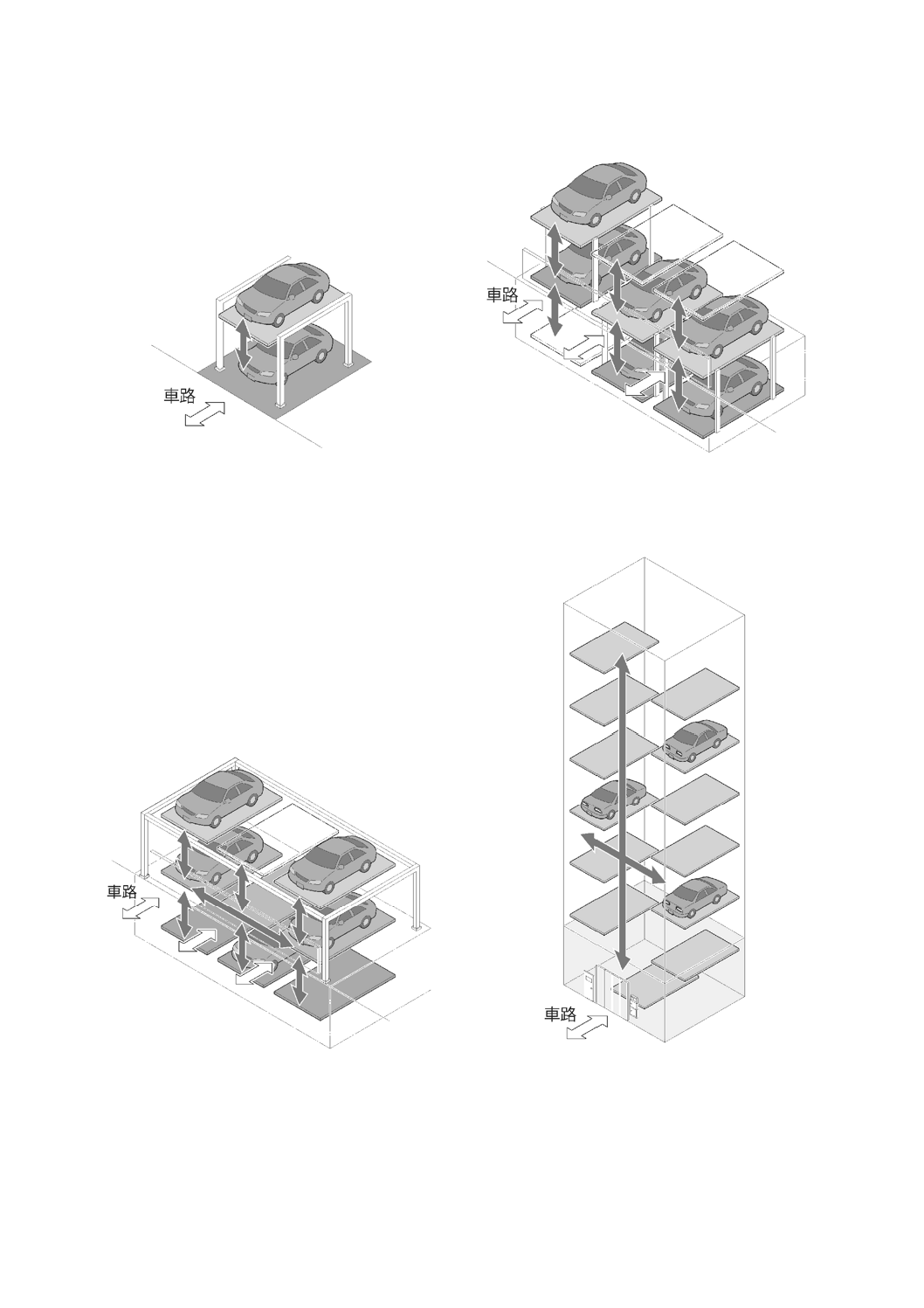
表的な機械式駐車装置を表B.1に,その類型及び方式の略図を図B.1〜図B.8に示す。
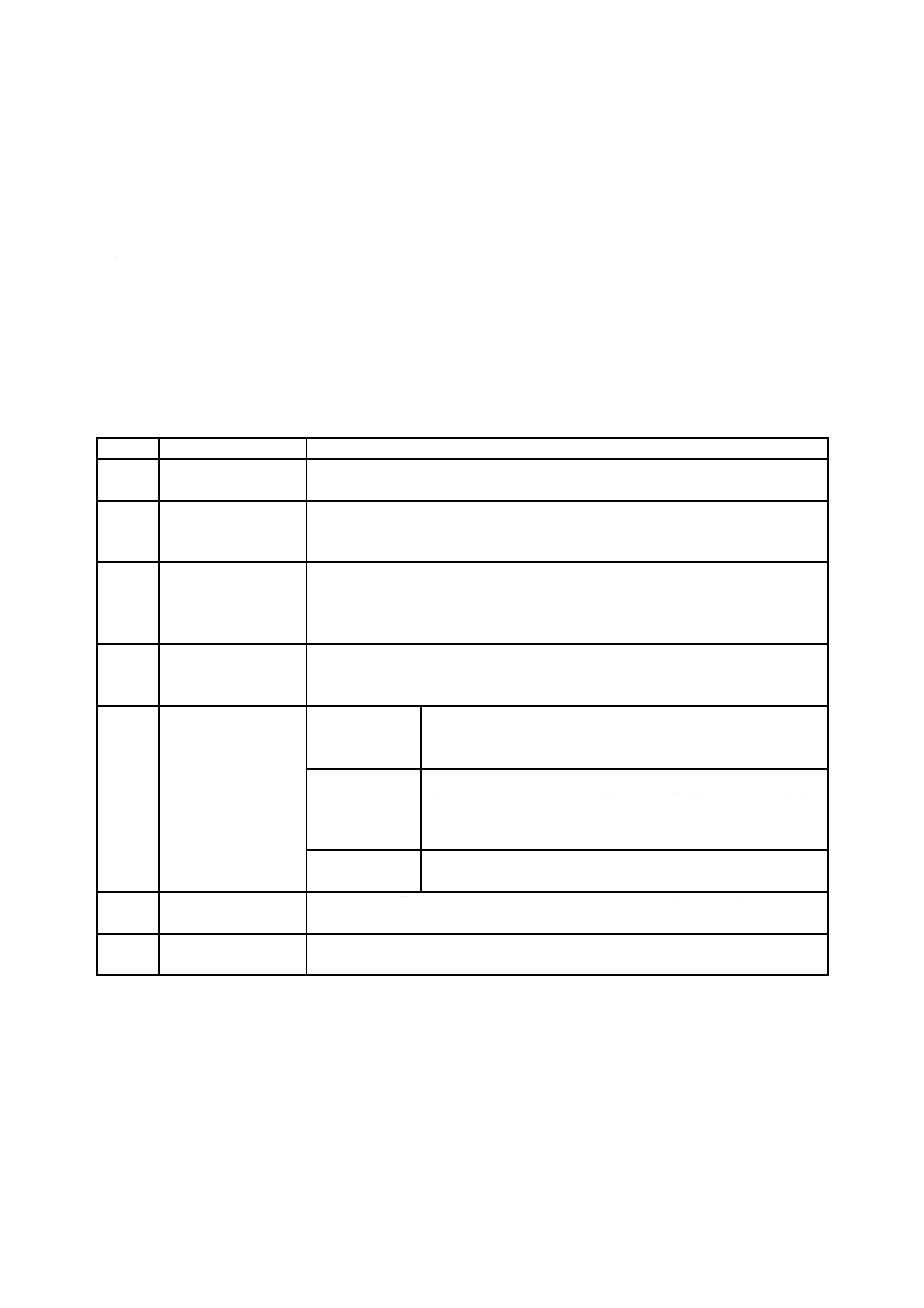
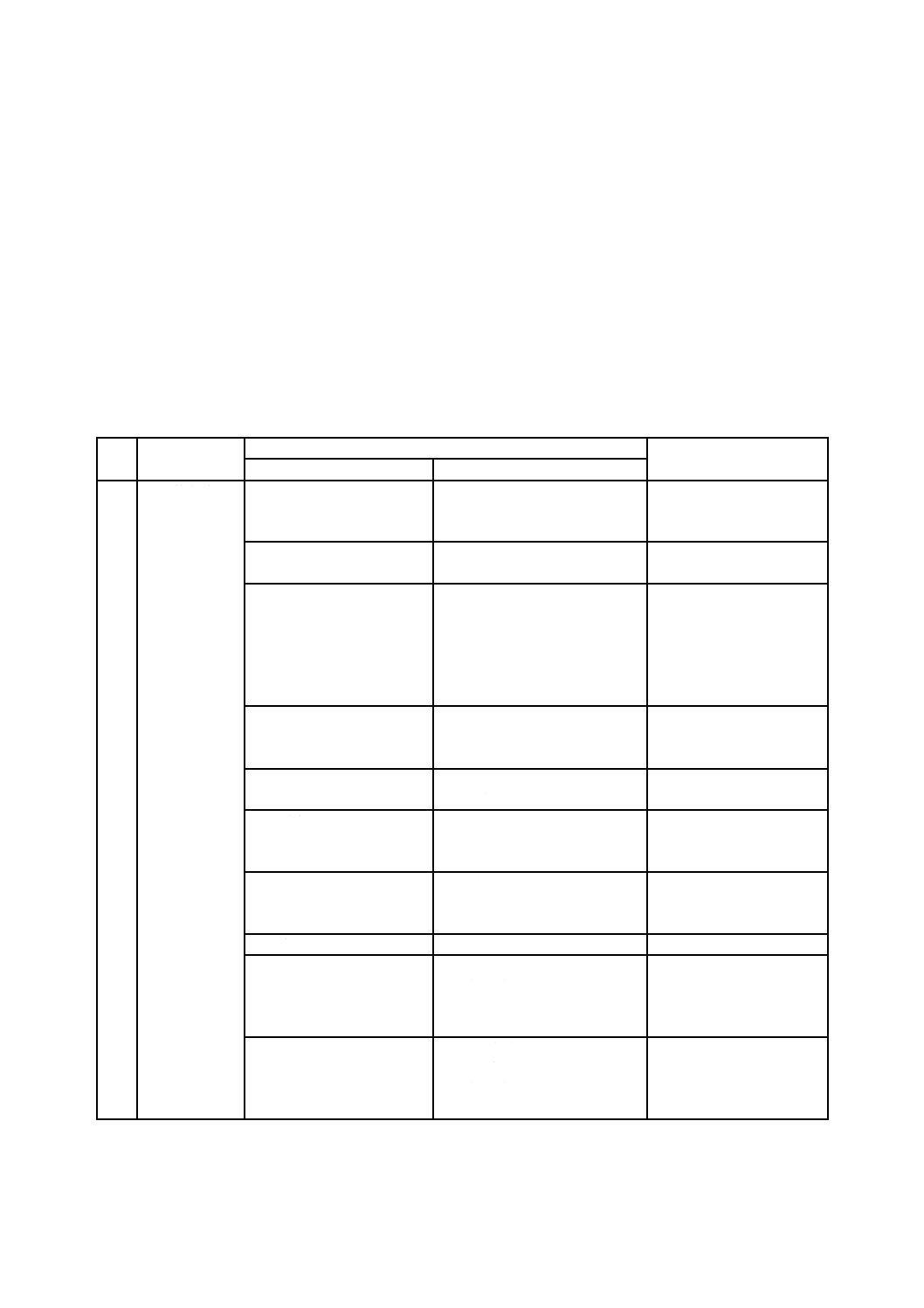
表B.1−代表的な機械式駐車装置
類型
方式
方式の概要
1
地上二段式
一つの昇降搬送装置の搬器上空間,及び定常位置に上昇停止した搬器の下方空間
を駐車室とする,地上格納の機械式駐車装置。
2
ピット二段(三段)
昇降式
鉛直方向に二つ又は三つの搬器を連結した昇降搬送装置の,各段の搬器上空間を
駐車室とする地下格納の機械式駐車装置。この機械式駐車装置の駐車(格納)し
ている状態は,最上段の搬器上面が自動車の入出庫面と同じになる。
3
昇降縦行(昇降横行)
式
自動車の入出庫面に縦行(横行)搬送する搬器を配置し,その搬器上方及び/又
は下方に固定の昇降搬送装置,及び縦行(横行)移動できる昇降搬送装置を設け,
それらの搬器上空間を駐車室とする,昇降と縦行(横行)とを組み合わせた,地
上格納又は一部地下格納の機械式駐車装置。
4
エレベータ方式
昇降搬送領域に接する複数の駐車室を,上下方向,又は上下方向及び縦列(横列)
方向に設け,昇降搬送装置と駐車領域との間で,自動車又は搬器を格納・取出し
する機械式駐車装置。
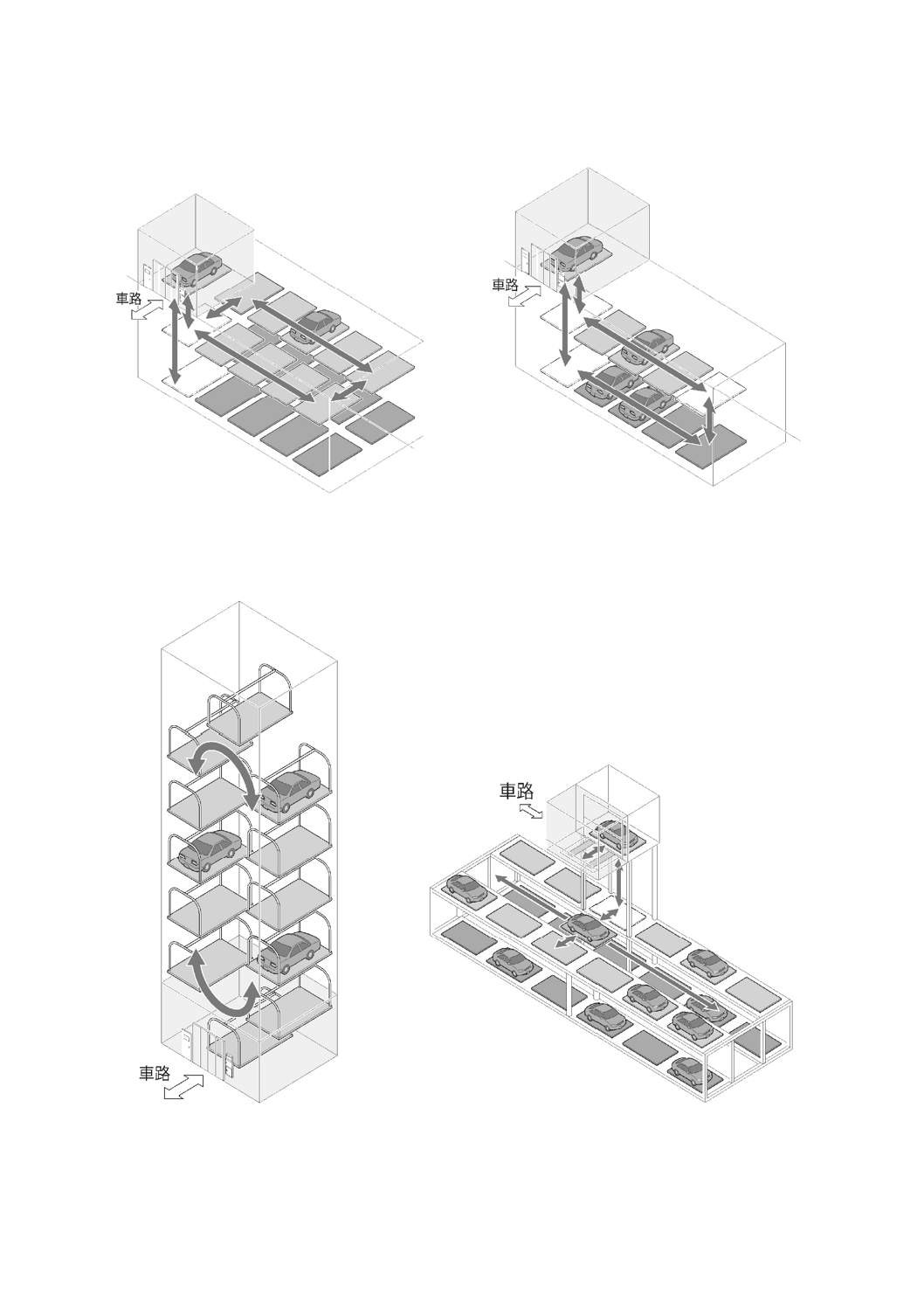
5
昇降搬送装置,水平
搬送装置などを組み
合わせた機械式駐車
装置で,乗降領域で
は昇降搬送装置の搬
器に自動車を入出庫
する右記の方式
平面往復方式
水平搬送領域に接する複数の駐車室を,縦列(横列)方向に設
け,水平搬送装置又は搬送台車と駐車領域との間で,自動車又
は搬器を格納・取出しする機械式駐車装置。
水平循環方式
駐車室となる複数の搬器を水平面に配置し,縦行作動及び横行
作動を繰り返して搬器を搬送する機械式駐車装置。この方式に
は,連結した搬器を搬送するものと,それぞれの搬器を個別に
搬送するものがある。
多層循環方式
駐車室となる上下二つ以上の層に,複数の搬器を主に水平方向
に配置し,上下の層で循環作動する機械式駐車装置。
6
垂直循環方式
駐車室となる複数の搬器を,主に上下方向に円環状に連結して,全体が循環作動
する機械式駐車装置。
7
類型4,5の方式など
のバース式
駐車・搬送領域と乗降領域とを区画扉で分離する,閉鎖型又は開放型の乗降領域
をもつ機械式駐車装置。
38
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.1−類型1(地上二段式)
図B.2−類型2(ピット二段昇降式)
図B.3−類型3(昇降横行式)
図B.4−類型4(エレベータ方式)
39
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.5−類型5(水平循環方式)
図B.6−類型5(多層循環方式)
図B.7−類型6(垂直循環方式)
図B.8−類型7(平面往復方式のバース式)
40
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
重要な危険源のリスト
C.1 重要な危険源のリスト
代表的な機械式駐車設備のリスクアセスメントによって特定された,重要な危険源及び対策に関連する
事項を表C.1に示す。
なお,機械式駐車設備の装置構成,機能及び性能によって危険源が異なるため,製造業者はリスクアセ
スメントによって危険源を同定し,対策を実施することが必要である。
表C.1−重要な危険源のリスト
No.
種類又は
グループ
危険源
この規格の細分箇条・
附属書
原因
結果
1
機械的危険源
− 加速度,減速度
− 投げ出される
− 押し潰し
− 衝撃
5.3,5.4,5.5.1
− 角張った部分
− 切傷又は切断
− こすれ又はすりむき
5.3,5.5.2
− 固定部分への可動要素
の接近
− 押し潰し
− 切傷又は切断
− 引込み又は捕捉
− 巻込み
− 衝撃
− 墜落
5.3,5.4,5.5.1,5.5.4,5.6.2,
5.6.4,5.7.1,5.7.2,5.7.3,
5.7.4,5.7.8,5.9
− 弾性要素
− 押し潰し
− 衝撃
− 墜落
5.5.3,5.6.2,5.6.6,附属書
E,附属書G
− 落下物
− 押し潰し
− 衝撃
5.5.4,5.6.1,5.6.4,5.6.6,
5.7.8
− 重力
− 投げ出される
− 押し潰し
− 衝撃
5.6.2,5.6.3,5.7.8
− 床面からの高さ
− 墜落
5.3,5.4,5.5.1,5.5.2,5.6.2,
5.6.4,5.6.5,5.6.6,5.7.4,
5.7.6,5.8
− 高圧
− 噴出による人体への注入
5.6.3,5.6.6
− 不安定
− 投げ出される
− 押し潰し
− 衝撃
− 墜落
5.5.3,5.6.2,5.6.4,5.6.6,
5.7.7,5.7.8,附属書E,附
属書G
− 運動エネルギー
− ひ(轢)かれる
− 投げ出される
− 押し潰し
− 衝撃
5.3,5.4,5.5.1,5.5.3,5.6.4,
5.7.4
41
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表C.1−重要な危険源のリスト(続き)
No.
種類又は
グループ
危険源
この規格の細分箇条・
附属書
原因
結果
1
機械的危険源
− 可動要素
− 押し潰し
− 切傷又は切断
− 引込み又は捕捉
− 衝撃
− 墜落
5.3,5.4,5.5.1,5.5.4,5.6.2,
5.6.3,5.6.4,5.7.1,5.7.2,
5.7.3,5.7.4,5.7.6,5.9
− 回転要素
− 切傷又は切断
− 引込み又は捕捉
− 巻込み
− 衝撃
− 墜落
5.3,5.4,5.5.1,5.7.1,5.7.3,
5.7.4,5.7.6,5.9
− 粗い,滑りやすい表面
− こすれ又はすりむき
− 滑り,つまずき及び墜落
5.5.2,5.8
− 鋭利な端部
− 切傷又は切断
5.5.2
2
電気的危険源
− 電磁気現象
− 体内の医療機器への影響
5.7.1
− 充電部
− やけど
− 感電死
− 火災
− 感電
5.7.1
− 短絡
− やけど
− 感電死
− 火災
− 感電
5.7.1
− 無線周波数帯電磁放射
− 体内の医療機器への影響
5.7.1
3
人間工学原則
の無視による
危険源
− 接近
− ヒューマンエラーの結果と
しての機械的危険源
5.6.5,5.7.3,5.7.4,5.7.5,
5.7.6,5.8,5.9,5.10,7.3
− 指示器及び視覚表示ユ
ニットの設計又は位置
− ストレス
− ヒューマンエラーの結果と
しての機械的危険源
5.7.4,5.9
− 制御装置の設計,位置
又は識別
− ヒューマンエラーの結果と
しての機械的危険源
5.5.1,5.7.1,5.7.3,5.7.4,
5.7.5,5.7.6
− 努力(身体的)
− ストレス
− ヒューマンエラーの結果と
しての機械的危険源
5.8
− 局部照明
− ストレス
− ヒューマンエラーの結果と
しての機械的危険源
5.8
4
機械が使用さ
れる環境に関
する危険源
− 雷
− 結果としての電気的危険源
5.7.1
− 湿度
− 結果としての電気的危険源
5.7.1
− 雪・凍結
− 滑り又は墜落
− 結果としての電気的危険源
5.7.1
− 水(雨水,漏水など)
− 滑り又は墜落
− 結果としての電気的危険源
5.7.1
− 風
− 結果としての機械的危険源
5.6.1,5.6.6,附属書E,附
属書G
− 地震
− 結果としての機械的危険源
5.6.1,5.6.6,5.7.8,附属書
E,附属書G,附属書K
42
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
安全要求事項の代表的な機種への適用
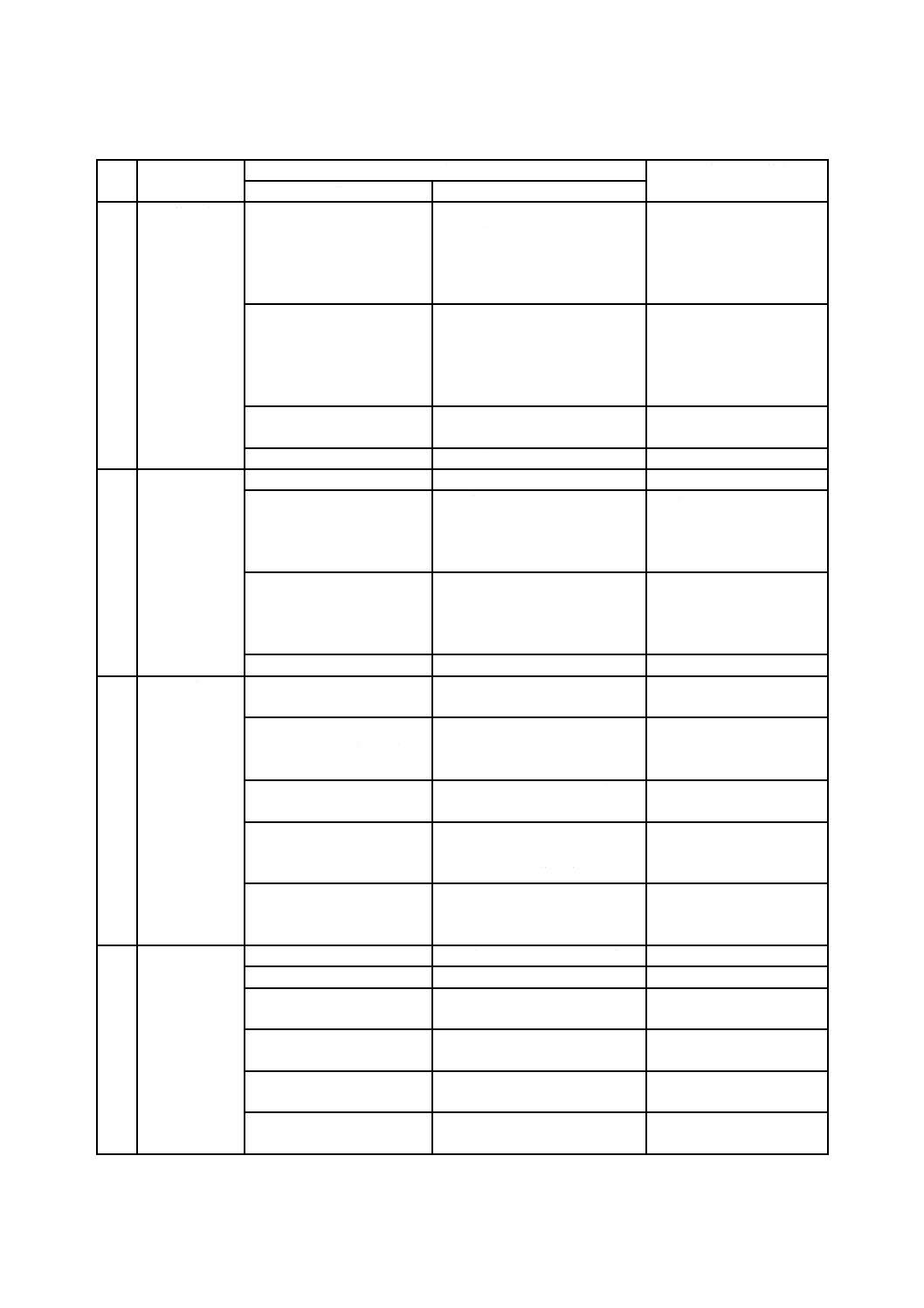
D.1 安全要求事項の代表的な機種への適用
この規格の安全要求事項の箇条・細分箇条に適用する機械式駐車装置の類型を,表D.1に示す。
表D.1−安全要求事項の適用
箇条・細分箇条
機械式駐車装置の類型(附属書B参照)
注記
1
2
3
4
5
6
7
5.1
一般事項
○
○
○
○
○
○
○
5.2
前庭
○
○
○
○
○
○
○
5.3
固定の囲い及び扉
×
○
○
○
○
○
○
5.3.1
固定の囲い及び扉の面
×
○
○
○
○
○
○
5.3.2
人の押し潰し,巻込み又は切断のお
それのある部位
×
○
○
○
○
○
○
5.3.3
通路扉,非常用扉及び作業用扉
×
×
×
○
○
×
○
5.3.4
避難口ハッチ
×
×
×
×
○
○
○
5.4
機械式駐車装置の区画
×
○
○
○
○
○
○
5.4.1
一般事項
×
○
○
○
○
○
○
5.4.2
駐車・搬送領域と外部とを区画する
外囲い
×
○
○
○
○
○
○
5.5
乗降領域
×
○
○
○
○
○
○
5.5.1
乗降領域の区画
×
○
○
○
○
○
○
5.5.2
乗降領域の寸法及び構造
○
○
○
○
○
○
○
5.5.3
乗降領域の安定性
○
○
○
○
○
○
○
5.5.4
乗降領域への降下保護装置(移動天
井など)
×
×
×
○
×
×
×
縦列式だけが該
当
5.6
機械装置
○
○
○
○
○
○
○
5.6.1
駐車領域及び搬送領域
○
○
○
○
○
○
○
5.6.2
搬送装置
○
○
○
○
○
○
○
5.6.3
油圧装置
○
○
○
×
×
×
×
5.6.4
調整作業及び保守作業側面の安全
要求事項
×
○
○
○
○
○
○
5.6.5
固定はしご
×
○
○
○
○
○
○
5.6.6
強度及び安定性
○
○
○
○
○
○
○
5.7
制御装置
○
○
○
○
○
○
○
5.7.1
一般事項
○
○
○
○
○
○
○
5.7.2
通常使用の操作方式
○
○
○
○
○
○
○
5.7.3
作動速度
○
×
×
×
×
×
×
単動制御の速度
5.7.4
起動及び起動制御
○
○
○
○
○
○
○
5.7.4.1
無人確認手段
×
○
○
○
○
○
○
5.7.4.2
起動許可装置(安全確認ボタン)
×
○
○
○
○
○
○
5.7.4.3
操作認証
○
○
○
○
○
○
○
5.7.4.4
作動制御
×
○
○
○
○
○
○
43
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.1−安全要求事項の適用(続き)
箇条・細分箇条
機械式駐車装置の類型(附属書B参照)
注記
1
2
3
4
5
6
7
5.7.5
停止
○
○
○
○
○
○
○
5.7.6
検知装置及びインタロック
×
○
○
○
○
○
○
5.7.7
自動車の停車位置規制
○
○
○
○
○
○
○
5.7.8
機械式駐車装置及び自動車の保護
装置
○
○
○
○
○
○
○
5.8
照明及び照度
○
○
○
○
○
○
○
5.8.1
前庭及び乗降領域
○
○
○
○
○
○
○
5.8.2
駐車・搬送領域
○
○
○
○
○
○
○
5.8.3
操作盤
○
○
○
○
○
○
○
5.8.4
非定常状態
×
×
×
○
○
○
○
5.9
視覚シグナル及び聴覚シグナル
×
○
○
○
○
○
○
5.10
通信アンテナ
×
○
○
○
○
○
○
6
安全要求事項及び/又は安全方策
の検証
○
○
○
○
○
○
○
7
工事及び使用のための情報並びに
表示及び標識
○
○
○
○
○
○
○
7.1
工事のための情報
○
○
○
○
○
○
○
7.2
使用のための情報(取扱説明書)
○
○
○
○
○
○
○
7.2.1
一般事項
○
○
○
○
○
○
○
7.2.2
操作説明
○
○
○
○
○
○
○
7.2.3
保守点検
○
○
○
○
○
○
○
7.3
表示及び標識
○
○
○
○
○
○
○
7.3.1
駐車可能な自動車の表示
○
○
○
○
○
○
○
7.3.2
利用者への注意事項の表示
○
○
○
○
○
○
○
7.3.3
取扱者への注意事項の表示
○
○
○
○
○
○
○
7.3.4
緊急連絡先の表示
○
○
○
○
○
○
○
7.3.5
機械式駐車設備へのマーキング及
び標識(絵文字)
○
○
○
○
○
○
○
注記 機械式駐車装置の類型の欄は,○は安全要求事項を適用する,×は適用しないを示す。
安全要求事項の適用は,それぞれの類型の機械式駐車装置の代表的な機種を対象としている。
44
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(規定)
強度及び安定性
E.1
一般
この附属書は,機械式駐車装置における構造部分並びに機械部分の強度設計及び安定性を確認するため
の方法について規定する。強度設計は,許容応力設計法を設計原則とする。
なお,正当な理論,確立された技術仕様(規格,設計基準,計算方法など)又は実験によって適切性が
証明できれば,この附属書に規定する数式及び数値によらなくてもよい。
E.2
用語及び定義
この附属書で用いる用語及び定義は,次による。
E.2.1
構造部分
機械式駐車装置に作用する荷重を支持する部分。該当するものの例を,次に示す。
a) 装置全体,並びに駐車室,昇降搬送装置,水平搬送装置,旋回装置などを支持する固定された構造物,
部材及びアンカーボルトの部分
b) 搬送装置のガイド部,ガイドレール及び支持部分
c) 搬器,昇降搬送装置,水平搬送装置,旋回装置などの移動する部分の構造体
E.2.2
機械部分
機械式駐車装置の可動する部分及びその動力伝達要素の部分。該当するものの例を,次に示す。
a) 搬送装置の駆動装置及びその構成要素(例えば,回転軸,歯車,ドラム,シーブなど)
b) ワイヤロープ,ローラチェーンなどの動力伝達要素
c) ロック用のレバー装置など,可動要素を備えた駆動装置又は被動装置
E.2.3 風荷重に関する用語
E.2.3.1
風圧力
風によって機械式駐車装置にかかる圧力。速度圧に風力係数を乗じて算出する。
E.2.3.2
速度圧
単位面積当たりの風荷重。
E.2.3.3
風力係数
構造物の形状に応じて決まる係数。
E.2.3.4
受圧面積
風の方向に垂直な面への投影面積(自動車の正面,側面及び機械式駐車装置の構造部分を考慮)。
45
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.2.3.5
基準風速
計算の根拠として使用される風速。
E.3
荷重の分類及び自動車の平均荷重
E.3.1 荷重の分類
E.3.1.1 頻度による荷重の分類
頻度による荷重の分類は,次による。
a) 定常荷重 定常荷重は,搬送装置及び積載する質量,加減速によって生じる慣性力,走行抵抗力など,
通常使用で生じる荷重とする。
b) 非定常荷重 非定常荷重は,環境条件(例えば,地震,風)及び通常使用以外の事象発生(例えば,
非常停止,衝突)によって,まれに生じる荷重とする。
E.3.1.2 積載荷重の分類
積載荷重の分類は,次による。
a) 車両荷重 空車状態の車両質量(3.28参照)による荷重とする。
b) 車載品荷重 スペアタイヤ,荷物など,想定される車載品の質量による荷重とし,500 Nとする。
c) 乗員荷重 入出庫する自動車に乗車した人の質量による荷重とし,次のいずれかによる。
1) 乗降領域への入場を利用者一人に制限した機械式駐車装置は,750 Nとする。
2) 乗降領域への入場を利用者一人に制限しない機械式駐車装置は,2 200 Nとする。
d) 荷重の分配 積載荷重(車両荷重,車載品荷重及び乗員荷重)は,自動車の前輪側と後輪側とで6:4
に分配し,タイヤ位置に集中荷重として作用するものとする。ただし,6:4の荷重分配が適さない自
動車は,その自動車に適した分配を考慮してよいが,分配比率の大きい方は6以上とする。
E.3.1.3 装置荷重の分類
装置荷重の分類は,次による。
a) 装置荷重(装置の質量による荷重) 静止している状態の当該装置自体の質量による荷重とし,積載荷
重は含まないものとする。
b) 固定部荷重 装置荷重のうち装置が作動しても移動しない装置部分の荷重とし,装置荷重から可動部
荷重を減じた部分の荷重とする。
c) 可動部荷重 装置荷重のうち,昇降,水平及び旋回の作動などで可動する部分(例えば,搬器,昇降
台などの装置部分,作動するためのワイヤロープ,ローラチェーンなど)の質量による荷重とし,積
載荷重は含まないものとする。
E.3.1.4 非定常荷重の分類
非定常荷重の分類は,次による。
a) 作動時風荷重 機械式駐車装置が入出庫のための作動をしている間に作用する風による荷重とし,構
造及び設置条件によっては考慮しなくてもよい。
b) 静止時風荷重 駐車状態で静止している機械式駐車装置に作用する風による荷重とし,構造及び設置
条件によっては考慮しなくてもよい。
c) 地震荷重 駐車状態で静止している機械式駐車装置に作用する地震による荷重とする。
d) 異常時荷重 行過ぎを制限する機械式終端装置[5.7.8 b) 参照],乗降領域の搬器降下制限装置[5.5.3.1
c) 参照]などの異常時に作用する荷重とする。
46
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.3.2 自動車の平均荷重
複数の自動車を格納した状態では,表E.1の自動車の平均車重から平均荷重を算定し,これを車両荷重
としてもよい。
表E.1−自動車の平均車重
車重区分:W
kg
平均車重
kg
1 300≦W≦1 700
1 300
1 700<W≦2 000
1 400
2 000<W≦2 500
1 600
2 500<W
車重×0.7
E.4
風荷重
E.4.1 風荷重の算出
E.4.1.1 風荷重の計算
風荷重に特別な定めのない機械式駐車装置,及び風の影響を考慮しなくてよい地下に設置される機械式
駐車装置を除き,風荷重は次の式で算出する。
a) 風荷重
F=w×A
ここに,
F: 風荷重(N)
w: 風圧力(N/m2)
A: 受圧面積(m2)
b) 風圧力
w=q×Cf
ここに,
q: 速度圧(N/m2)
Cf: 風力係数=1.2
c) 速度圧
q=0.6×E×V02
ここに,
V0: 基準風速(作動時:16 m/s,静止時:38 m/s)
E: 機械式駐車装置の設置環境による係数で,装置全高(H)
(風の影響を受ける装置の最大高さ)によって,次の式
とする。
H≦5(m)の場合は,
E=[1.7×(5/450)0.20]2×2.5=1.194
H>5(m)の場合は,
E=[1.7×(H/450)0.20]2×2.5
d) 静止時の基準風速V0が,38 m/sを超える地域に機械式駐車装置を設置する場合は,当該場所の基準風
速で風荷重を算出し,強度及び安定性を確認する。
e) 作動時の風荷重は,作動範囲の最も不利な位置に搬器がある状態を想定する。
E.4.1.2 風荷重の簡易計算(参考)
風荷重の計算には,次の簡易計算を用いてもよい。
a) 受圧面積:自動車の受圧面積の算出は,次の式による。
47
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 正面方向の場合
A=W×Hc×Ck1
ここに,
W: 車幅(m)
Hc: 車高(m)
Ck1: 受圧面積係数=0.95
2) 側面方向の場合
A=L×Hc×Ck2
ここに,
L: 車長(m)
Hc: 車高(m)
Ck2: 受圧面積係数=0.90
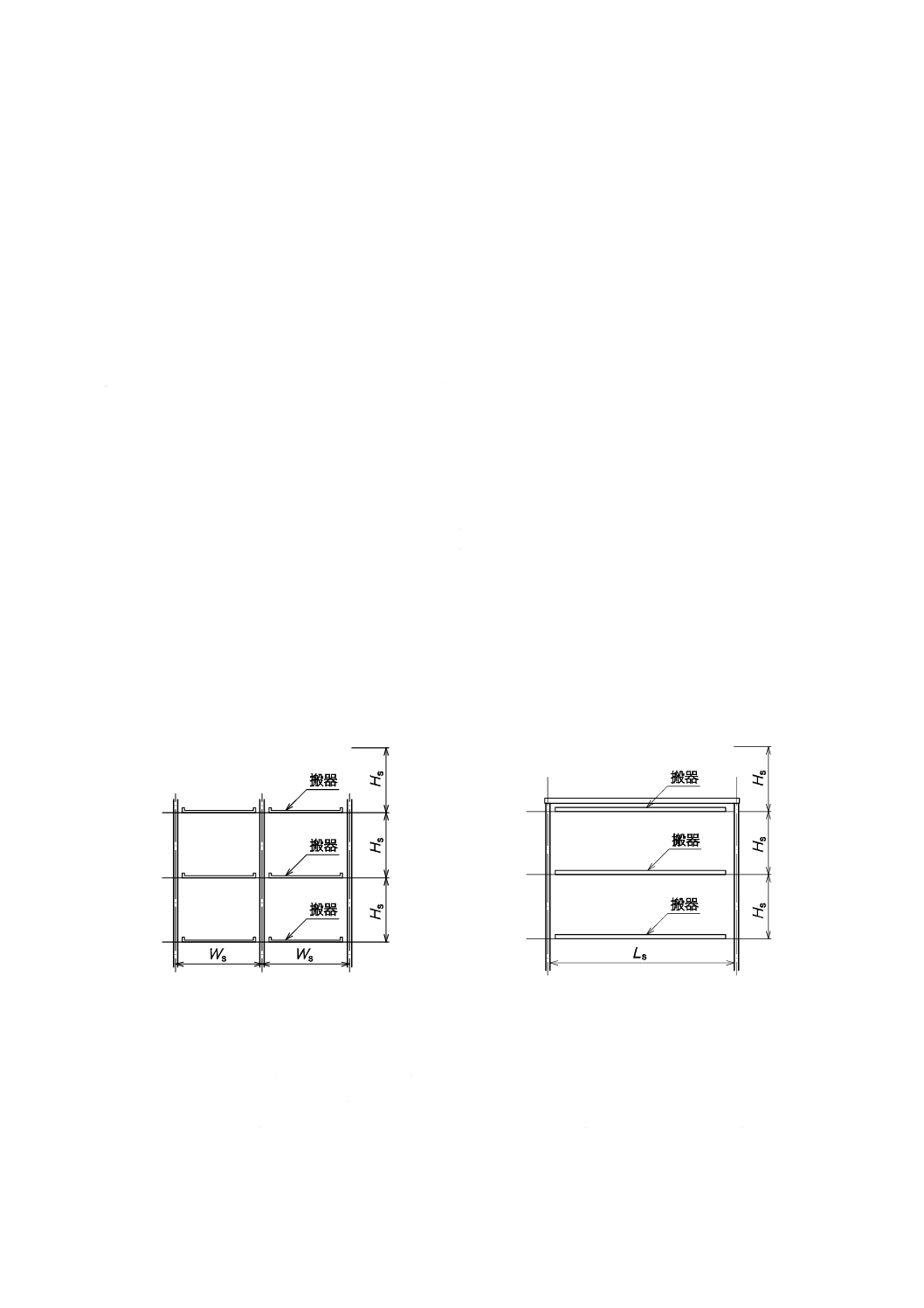
b) 構造部分の受圧面積:構造部分の受圧面積の算出は,次の式による。
1) 正面方向の場合(図E.1参照)
A=Ws×Hs×Cs×N×S
ここに,
Ws: 機械柱芯間(列ピッチ)(m)
Hs: 階高相当間(上下搬器間隔)(m)
Cs: 受圧面積係数=0.85
N: 列数
S: 段数
2) 側面方向の場合(図E.2参照)
A=Ls×Hs×Cs×S
ここに,
Ls: 機械柱芯間(奥行ピッチ)(m)
Hs: 階高相当間(上下搬器間隔)(m)
Cs: 受圧面積係数=0.85
S: 段数
図E.1−正面方向概略図
図E.2−側面方向概略図
E.4.2 駐車している自動車の安定性
搬器上に駐車している自動車が,風荷重で転倒するおそれがないか,風荷重で発生するモーメントと,
車重で得られる抵抗モーメントとを算出し,次によって確認する。
なお,安定性では軽自動車が不利な場合も想定されるため,最大の自動車と車重の軽い軽自動車との2
ケースで確認する。
48
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
条件によって,転倒モーメントが超過する場合は,自動車が搬器から落下しないための保護設備を設け
る。また,保護設備は短期許容応力以下で設計する。
a) 風荷重で発生するモーメント:Mc
Mc=F×Hg
ここに,
F: 風荷重(N)
Hg: 車両の重心高さ(m)で,車高×0.4とする。
b) 抵抗モーメント:Mw
Mw=Wc×TR/2
ここに,
Wc: 車両荷重+車載品荷重(N)
TR: トレッド(m)
c) 風荷重は静止時の基準風速で算出した数値を用いるものとする。ただし,自動車が地表面よりも上部
に位置するのが作動時だけとする構造の機械式駐車装置では,作動時の基準風速で算出した数値を用
いてもよい。
d) 安定性を確認するためのモデル自動車の一例(参考)を,表E.2に示す。
表E.2−自動車諸元(参考)
分類
車長
mm
車幅
mm
車高
mm
ホイールベース
mm
トレッド
mm
車両質量
kg
特大自動車
5 750
2 050
2 100
3 480
1 730
2 500
大型自動車
5 300
1 950
2 100
3 180
1 670
2 300
中型自動車
5 050
1 850
2 100
3 000
1 580
2 000
小型自動車
4 700
1 700
2 100
2 810
1 470
1 700
軽自動車
3 400
1 480
2 000
2 460
1 300
900
E.5
地震荷重
E.5.1 地上に設置される機械式駐車設備
地上に設置される機械式駐車設備の設計用水平震度(KH)は,次による。
a) 地上面から最上部までの高さが45 m以下の機械式駐車設備では,KH≧0.3とする。
b) 地上面から最上部までの高さが45 mを超える(高揚程型)機械式駐車設備のKHは,表E.3による。
表E.3−高揚程型の設計用水平震度
高さ
設計用水平震度(KH)
昇降搬送装置の駆動部分
その他の部分
45 mを超える部分
1.0以上a)
0.45以上
45 m以下の部分
0.3以上
注a) 昇降搬送装置の駆動部分の設置位置が,地上面から45 mを超える場合に適用する。
c) 地震応答解析を用いる場合は,a) 又はb) に代えKH=FR/gの式で,設計用水平震度(KH)を算出す
る。ただし,免震構造,制震構造などで算出したKHが0.3未満の場合は,KH=0.3とする。
ここに,FR:機械式駐車装置の設置範囲内の建築物の各階層のフロアレスポンスの最大値(m/s2)。
地動入力レベルは,加速度の場合200〜250 Gal,速度の場合25〜30 kineとし,一般的な地震動波形(例
えば,エルセントロNS波,タフトEW波,TOKYO 101 NS波など)を用いるものとする。
49
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
g:重力加速度(9.806 m/s2)
E.5.2 地下に設置される機械式駐車設備
地下に設置される機械式駐車設備の設計用水平震度(KH)は,次の式による。
KH≧0.1(1−H/40)
ここに,
H: 地下部分の地上面からの深さ(m)。ただし,20 mを超
える場合は,20 mとする。
E.6
材料及び許容応力
E.6.1 材料
機械式駐車装置に用いる材料は,JIS又は相当規格の化学成分及び機械的性質をもつものとする。また,
鋼材の定数は,表E.4による。
表E.4−鋼材の定数
鋼材の特性
定数
縦弾性係数:E
N/mm2
206 000
せん断弾性係数:G
N/mm2
79 000
ポアソン比:ν
(1/m)
0.3
線膨張係数:α
1.2×10−5
密度:ρ
g/cm3
7.85
E.6.2 許容応力
E.6.2.1 一般事項
a) 長期許容応力の値は,E.6.2.2〜E.6.2.6による。
b) 短期許容応力の値は,長期許容応力に対し,1.5を乗じた値とする。
E.6.2.2 基本許容応力
基本許容応力σaは,材料の降伏点(又は0.2 %耐力)を1.5で除した値とする。
E.6.2.3 構造部分,機械部分及び溶接部分の許容応力
構造部分,機械部分及び溶接部分の長期応力に対する許容応力の値は,表E.5による。
50
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表E.5−構造部分,機械部分及び溶接部分の許容応力
区分
応力の種類
記号
許容応力
計算に用いる断面
構造部分
機械部分
引張り
σta
σa
純断面
圧縮
σca
σa/1.15
総断面
曲げ
引張側
σbat
σa
純断面
圧縮側
σbac
σa/1.15
総断面
せん断
τ
σa/3
純断面
座屈
σk
σa/1.15及びE.6.2.5による。
総断面
支圧
σda
1.42×σa
総断面
溶
接
部
分
突
合
せ
引張り
鋼材種類A
0.840×σa
のど厚
鋼材種類B
0.800×σa
圧縮
鋼材種類A
0.945×σa/1.15
のど厚
鋼材種類B
0.900×σa/1.15
曲げ
引張側
鋼材種類A
0.840×σa
のど厚
鋼材種類B
0.800×σa
圧縮側
鋼材種類A
0.840×σa/1.15
のど厚
鋼材種類B
0.800×σa/1.15
せん断
鋼材種類A
0.840×σa/3
のど厚
鋼材種類B
0.800×σa/3
す
み
肉
引張り
鋼材種類A
0.840×σa
のど厚
鋼材種類B
0.800×σa
圧縮
鋼材種類A
0.840×σa/1.15
のど厚
鋼材種類B
0.800×σa/1.15
曲げ
鋼材種類A
−
−
鋼材種類B
−
せん断
鋼材種類A
0.840×σa/3
のど厚
鋼材種類B
0.800×σa/3
この表の補足説明を,次に示す。
− この表において,鋼材種類AはJIS G 3106,JIS G 3114,JIS G 3128,JIS G 3136のSN400B,SN400C,SN490B
及びSN490C,JIS G 3444のSTK490,JIS G 3445のSTKM18(A,B,C)並びにJIS G 3466のSTKR490に適
合する鋼材を,鋼材種類Bはこれらの鋼材以外の鋼材を表す。
− 純断面は,ボルト孔などの欠損部分の断面積を除いた最小断面の位置とする。
E.6.2.4 溶接部の許容応力
溶接部分の許容応力は表E.5によるが,次の放射線試験の事項を全てを満たす突合せ溶接部は,母材の
許容応力としてもよい。ただし,許容引張応力,許容圧縮応力及び許容曲げ応力に限る[JIS B 8821:2013
の7.3(溶接部分の許容応力)を参照]。
a) JIS Z 3104の鋼溶接継手の放射線透過試験方法とする。
b) 放射線試験は,溶接箇所の全長に対し,20 %以上の長さとする。
c) 放射線試験を行う溶接部の余盛りは,母材の表面と同一の面とするか,余盛中央を表E.6の高さ以下
とする。
51
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表E.6−余盛の高さ
母材の厚さ
mm
余盛の高さ
mm
12以下
1.5
12を超え25以下
2.5
25を超えるもの
3.0
E.6.2.5 許容座屈応力
許容座屈応力は,次の式によって計算を行って得た値以下とする。
a) λ<20の場合
σk=σca
b) 20≦λ≦200の場合
σk=1/ω×σca
ここに,
σk: 許容座屈応力(N/mm2)
σca: 許容圧縮応力(N/mm2)
ω: 座屈係数(数値はJIS B 8821:2013の表17〜表23を参照)
λ: 部材の細長比
E.6.2.6 ボルト接合部の許容応力
ボルト接合部の許容応力は,次による。
a) せん断を受けるボルトの許容力は,次の式による許容せん断力又は接合材の許容支圧力の,小さい方
の値とする。
1) 1面せん断の場合
Rs=π×d2/4×fs
2) 2面せん断の場合
Rs=π×d2/2×fs
3) 接合材の許容支圧力
Re=d×t×fe
ここに,
Rs: ボルトの許容せん断力(N)
Re: 接合材の許容支圧力(N)
fs: ボルトの許容せん断応力(N/mm2)
fe: 接合材の許容圧縮応力(N/mm2)
d: ボルト軸の直径(mm)
t: 接合される母材の板厚(又は板厚の和)の小さい方の値
(mm)
b) 引張りを受けるボルトの許容力は,次の式による。ただし,偏心がある場合は,これを考慮して低減
する。
Rt=Ae×ft
ここに,
Rt: ボルトの許容引張力(N)
Ae: ボルトねじ部の有効断面積(mm2)
ft: ボルトの許容引張応力(N/mm2)
c) ボルト及び高力ボルトの長期応力に対する許容引張応力及び許容せん断応力は,表E.7による。許容
力は,軸断面について算出する。
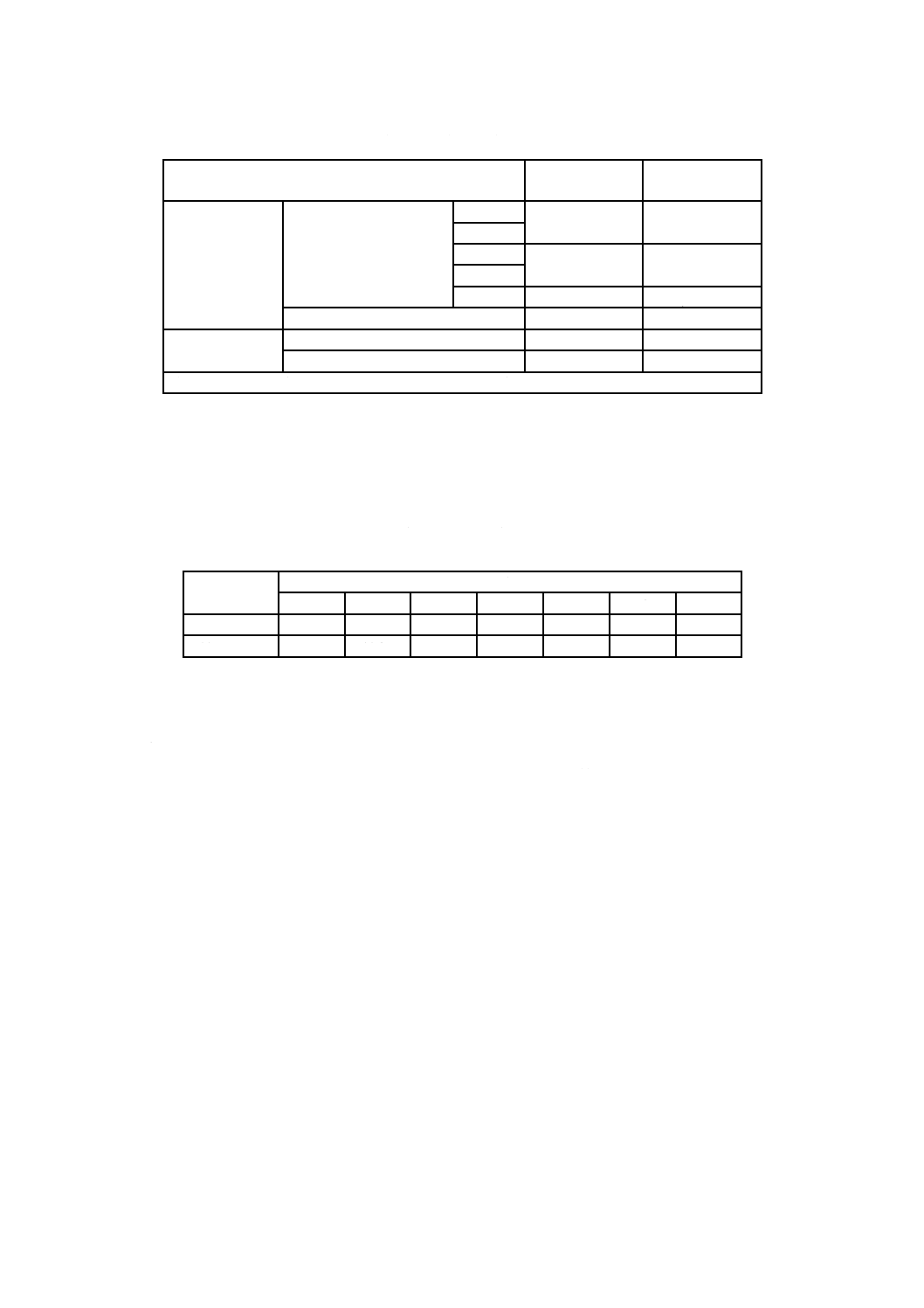
52
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表E.7−ボルト及び高力ボルトの許容応力
材料
引張り
N/mm2
せん断
N/mm2
ボルト
強度区分
4.6
160
160/3
4.8
5.6
200
200/3
5.8
6.8
280
280/3
その他の強度ボルト
F/1.5
F/1.53
高力ボルト
F8T
250
120
F10T
310
150
注記 その他の強度ボルトの“F”は,ボルト材料の降伏点又は耐力とする(単位:N/mm2)。
E.6.2.7 高力ボルトの設計ボルト張力
高力ボルトは,表E.8に示す設計ボルト張力で締め付けし,せん断力は結合材間の摩擦力で伝えるもの
とする。
表E.8−高力ボルトの設計ボルト張力(kN)
単位 kN
種類
呼び
M12
M16
M20
M22
M24
M27
M30
F8T
45.8
85.2
133
165
192
250
305
F10T
56.9
106
165
205
238
310
379
E.7
強度設計
E.7.1 一般事項
一般事項は,次による。
a) 一般的な機械要素は,確立された技術仕様(規格,設計基準,計算方法など)又は要素製品の製造業
者が示す技術仕様(計算方法,許容荷重など)を満たさなければならない。
b) 荷重頻度が高く,信頼性が安全性に対して極めて重要な部分には,確立された技術仕様による疲労設
計法を用いるのがよい。
E.7.2 構造部分の強度
E.7.2.1 自動車の通過部分及び乗降領域の床部分並びに人の通路部分(入出庫時)の強度
自動車の通過部分及び乗降領域の床部分並びに人の通路部分の強度は,次による。
a) 自動車の通過部分 自動車の通過部分となる床及び入出庫するときの搬器に対しては,固定部荷重又
は可動部荷重にγ×(車両荷重+車載品荷重+乗員荷重)を加えた荷重とし,発生応力は長期許容応
力以下とする。
なお,動荷重係数γの値は,1.2以上とする。
b) 床の奥行きが600 mmを超える搬器奥側の床部分[5.5.2.5 b) 参照]
1) 駐車可能な自動車のオーバハング及びホイールベースによって,前輪及び後輪の両方が,前輪だけ
が又は後輪だけが載るのかを確認する。
2) 作用する荷重は,床部分の質量による荷重に,前輪及び後輪の両方が載るおそれがあるときは,γ
×(車両荷重+車載品荷重+乗員荷重)の100 %を,前輪だけが又は後輪だけが載るおそれがある
53
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
場合は,E.3.1.2 d) に規定する荷重の分配比率の大きい方を乗じた荷重を加えるものとする。
3) 用いる動荷重係数γの値は1.2以上とし,発生応力は短期許容応力以下とする。
c) 床の幅が800 mmを超える搬器側方の床部分[5.5.2.5 b) 参照]
1) 駐車可能な自動車の車幅及びトレッドから,全ての前輪及び後輪が,又は片側の前輪及び後輪が載
るのかを確認する。
2) 床部分の質量による荷重に,全ての前輪及び後輪が載るおそれがあるときは,γ×(車両荷重+車載
品荷重+乗員荷重)の100 %を,片側の前輪及び後輪が載るおそれがある場合は,50 %を乗じた荷
重を加えるものとする。
なお,前輪及び後輪の荷重の分担は,E.3.1.2 d) に規定する荷重の分配比率とする。
3) 用いる動荷重係数γの値は1.2以上とし,発生応力は短期許容応力以下とする。
d) 人の通路部分 乗降領域の人の通路とする床,及び歩行が想定される部分では,次の条件で強度計算
する。
1) 1.5 kNの集中荷重を,床の最も不利な位置に負荷する。
2) 床に荷重を負荷したときに,構成する部材の発生応力は,長期許容応力以下とする。
E.7.2.2 搬送装置,旋回装置などの装置部分及び搬器(作動時)の強度
搬送装置,旋回装置などの装置部分及び搬器の強度は,次による。
a) 昇降搬送装置,水平搬送装置,旋回装置などの支持構造物
1) 装置作動時の鉛直荷重は,固定部荷重にγ×(可動部荷重+車両荷重+車載品荷重)を加えた荷重
とし,発生応力は長期許容応力以下とする。
なお,動荷重係数γは,インバータ制御などを用いたものは1.1以上とし,直入れ起動などを用
いたものは1.2以上とする。
2) 装置作動時の水平荷重として風荷重を考慮するものは,作動時風荷重を加えた荷重とし,発生応力
は長期許容応力以下とする。
なお,水平荷重には動荷重係数γは乗じなくてもよい。
3) 装置作動時に風荷重を考慮しなくてもよいものは,水平荷重として装置作動時の鉛直荷重の0.1を
下限とし,発生応力は長期許容応力以下とする。
b) 搬器及び昇降台,搬送台車などの可動部分 自動車を積載した搬器及び昇降台,搬送台車などの装置
可動部が作動するときの鉛直荷重は,γ×(可動部荷重+車両荷重+車載品荷重)とし,発生応力は長
期許容応力以下とする。
なお,動荷重係数γは,a) 1) の値とする。
E.7.2.3 支持構造物(静止時)の強度
機械式駐車装置全体又は駐車室,昇降搬送装置,水平搬送装置,旋回装置などの支持構造物,部材及び
アンカーボルトの部分は,次の条件において発生応力は長期許容応力以下としなければならない。
a) 機械式駐車装置全体又は駐車室の支持構造物は,最大駐車台数に相当する駐車室全てに,最大車重の
自動車を格納しているものとするが,複数の自動車を格納した状態では,車両荷重として自動車の平
均荷重を用いてもよい。
b) 駐車台数に含まれない部分(例えば,荷繰り,搬送装置,旋回装置などの搬送スペース)には,自動
車を格納していないものとする。
c) 負荷する鉛直荷重は,(固定部荷重+可動部荷重+車両荷重+車載品荷重)とし,動荷重係数γは乗じ
なくてもよい。
54
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.7.2.4 支持構造物[静止時(風)]の強度
装置全体又は駐車室,昇降搬送装置,水平搬送装置,旋回装置などの支持構造物,部材及びアンカーボ
ルトの部分は,次の条件の静止時風荷重(E.4参照)が水平荷重として負荷されたときに,発生応力は短
期許容応力以下としなければならない。
a) 装置全体又は駐車室の支持構造物は,最大駐車台数に相当する駐車室全てに,最大車重の自動車を格
納しているものとするが,複数の自動車を格納した状態では,車両荷重として自動車の平均荷重を用
いてもよい。
b) 駐車台数に含まれない部分(例えば,荷繰り,搬送装置,旋回装置などの搬送スペース)には,自動
車を格納していないものとする。
c) 負荷する鉛直荷重は,(固定部荷重+可動部荷重+車両荷重+車載品荷重)とする。
E.7.2.5 支持構造物[静止時(地震)]の強度
装置全体又は駐車室,昇降搬送装置,水平搬送装置,旋回装置などの支持構造物,部材及びアンカーボ
ルトの部分は,次の条件の静止時地震荷重(E.5参照)が水平荷重として負荷されたときの発生応力は短
期許容応力以下としなければならない。
a) 装置全体又は駐車室の支持構造物は,最大駐車台数に相当する駐車室全てに,最大車重の自動車を格
納しているものとするが,複数の自動車を格納した状態では,車両荷重として自動車の平均荷重を用
いてもよい。
b) 駐車台数に含まれない部分(例えば,荷繰り,搬送装置,旋回装置などの搬送スペース)には,自動
車を格納していないものとする。
c) 負荷する鉛直荷重は,(固定部荷重+可動部荷重+車両荷重+車載品荷重)とする。
E.7.3 機械部分の強度
E.7.3.1 特別な機械要素の強度
特別な機械要素の強度は,次による。
a) ワイヤロープ及びローラチェーン
1) ワイヤロープの破断力及びローラチェーンの引張強さは,次の最大荷重(動荷重係数γは乗じなく
てもよい。)によって発生する引張力の7倍以上とする。
入出庫時が最大の場合は,可動部荷重+車両荷重+車載品荷重+乗員荷重,とする。
作動時の静荷重が最大の場合は,可動部荷重+車両荷重+車載品荷重,とする。
2) ワイヤロープ及びローラチェーンの端末金具の引張強度は,ワイヤロープの破断力及びローラチェ
ーンの引張強さの80 %以上とする。
b) 油圧装置
1) 油圧装置は,作動時の最大荷重,可動部荷重+車両荷重+車載品荷重を算出し,常用圧力を決定す
る。
2) 油圧シリンダの耐圧力は,油圧装置の常用圧力に対して,延性材料では4倍以上,ぜい性材料では
10倍以上とする。
3) 油圧配管の耐圧力は,油圧装置の常用圧力に対して,4倍以上とする。
4) 油圧ホースの破壊圧力は,油圧装置の常用圧力に対して,7倍以上とする。
c) 人が乗る搬器のつり用ワイヤロープ及びローラチェーン 調整,試験,試運転及び保守作業において,
常用の昇降手段として搬器に人が乗る機械式駐車装置では,更に次の事項を満たさなければならない。
1) 人を乗せる場合は,人だけを乗せるものとする(自動車と人の両方を乗せてはならない。)。
55
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2) 乗員荷重は1人当たり750 Nとし,搭乗人員(定員)を乗じるものとする。
3) ワイヤロープの破断力及びローラチェーンの引張強さは,人を乗せたときの荷重(動荷重係数γは
乗じなくてもよい。),可動部荷重+搭乗人員×乗員荷重によって発生する引張力の,10倍以上とす
る。
4) ワイヤロープ及びローラチェーンの端末金具の引張強度は,ワイヤロープの破断力及びローラチェ
ーンの引張強さの80 %以上とする。
E.7.3.2 異常時荷重を考慮する個別の装置部分
異常時荷重を考慮する個別の装置部分は,次による。
a) 搬器固定装置[5.5.3.1 a) 1) 参照]及び搬器降下制限装置[5.5.3.1 c) 1) 参照]
1) 乗降領域の床を構成する搬器が降下するのを抑止する搬器降下制限装置では,荷重はβ×(可動部
荷重+車両荷重+車載品荷重+乗員荷重)とし,発生応力は短期許容応力以下とする。
なお,衝撃係数βの値は,2.0以上とする。
2) 搬器を乗降領域の定常位置に固定する搬器固定装置では,自動車の通過部分[E.7.2.1 a) 参照]の強
度設計としてもよい。
b) 可動床降下制限装置[5.5.3.3 c) 参照]
1) 降下する可動床を支持する構造の可動床降下制限装置では,自動車の通過部分となる可動床の荷重
はβ×(可動部荷重+車両荷重+車載品荷重+乗員荷重),人だけを対象とする可動床の荷重はβ×
(可動部荷重+1.5 kN)とし,発生応力はそれぞれ短期許容応力以下とする。
なお,衝撃係数βの値は,2.0以上とする。
2) 可動床を乗降領域の定常位置に固定する,降下を想定しない可動床降下制限装置では,自動車の通
過部分となる可動床ではE.7.2.1 a),人の通路部分となる可動床ではE.7.2.1 d) の強度設計としても
よい。
c) 乗降領域への降下保護装置(5.5.4参照)及び搬器降下制限装置[5.5.3.1 c) 2) 参照] 乗降領域へ降下
するおそれのある部分を支持する構造の降下保護装置及び搬器降下制限装置では,荷重はβ×(可動
部荷重+車両荷重+車載品荷重)とし,発生応力は短期許容応力以下とする。
なお,衝撃係数βの値は,2.0以上とする。
d) 機械式終端装置[5.7.8 b) 3) 参照] 昇降搬送装置,水平搬送装置,出入口扉及び区画扉に機械式終端
装置(エンドストッパ)を設ける場合は,荷重はβ×(可動部荷重+車両荷重+車載品荷重)とし,
発生応力は短期許容応力以下とする。
なお,衝撃係数βの値は,2.0以上とする。
e) 駐車室の搬器及び自動車の落下防護設備[5.6.1.1 c) 参照] 駐車室の搬器及び自動車の落下を防護す
る装置では,風荷重又は地震荷重が作用したときに,落下するおそれのある部分から装置にかかる荷
重とし,発生応力は短期許容応力以下とする。
なお,動荷重係数γ及び衝撃係数βは考慮しなくてもよい。
E.7.3.3 地震荷重を考慮する個別の装置部分
地震荷重を考慮する個別の装置部分は,次による。
a) 駐車室搬器の水平移動制限装置[5.6.1.1 d) 参照] 水平荷重として地震荷重が作用したときに,駐車
室の搬器が昇降搬送領域に落下しないように,水平移動制限装置支持部分を含め,次によって確認し
なければならない。
1) 搬器には,最大車重の自動車を格納しているものとする。
56
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2) 水平荷重を算出するための鉛直荷重は,可動部荷重(搬器質量)+車両荷重+車載品荷重とする。
3) 設計用水平震度の大きさによっては格納している自動車の移動又は転倒のおそれがあるが,強度計
算では考慮しなくてもよい。
4) 地上に設置される機械式駐車装置では,水平移動制限装置に作用する水平荷重の算出は,次の設計
用水平震度とし,発生応力はそれぞれの許容応力以下とする。
なお,材料の引張強さを許容応力とする場合は,変形によって機能が喪失しないことを試験など
で検証しなければならない。
− 地上面からの高さが45 m以下の駐車室部分
KH≧0.3
短期許容応力以下
− 地上面からの高さが45 mを超え,60 m以下の駐車室部分
KH≧0.45
短期許容応力以下
− 地上面からの高さが60 mを超える駐車室部分
KH≧1.0
材料の引張強さ
5) 地震応答解析を行う機械式駐車設備では,E.5.1 c) の設計用水平震度を用い,その設計用水平震度
の大きさによって次に示す許容応力を適用する。
− 設計用水平震度:KH<1.0の場合は,短期許容応力以下
− 設計用水平震度:KH≧1.0の場合は,材料の引張強さ
6) 地下に設置される機械式駐車装置では,水平移動制限装置に作用する水平荷重の算出はE.5.2の設
計用水平震度とし,発生応力は短期許容応力以下とする。
b) 搬送装置のガイド部,ガイドレール及び支持部分(5.6.2.6参照)
1) 水平荷重として地震荷重(E.5参照)が作用したときに,搬器などがガイド部から外れないように
しなければならない。
なお,地震荷重を想定する部位を次に示す。
− 昇降搬送装置の搬器及び昇降台のガイド部,並びにガイドレール及び支持金物
− 昇降搬送装置のカウンタウェイトのガイド部,並びにガイドレール及び支持金物
− 水平搬送される搬器のガイド部,並びにガイドレール及び支持金物
− 搬送台車のガイド部,並びにガイドレール及び支持金物
2) 地上に設置される機械式駐車装置では,ガイド部に作用する水平荷重はE.5.1の設計用水平震度と
し,発生応力は短期許容応力以下とする。
3) 地下に設置される機械式駐車装置では,ガイド部に作用する水平荷重はE.5.2の設計用水平震度と
し,発生応力は短期許容応力以下とする。
E.7.4 乗降領域の安定性
自動車の入出庫で跳ね上がるおそれのある乗降領域の床部分では,次の条件で跳ね上がりの安定性を確
認しなければならない。
a) 作用荷重 自動車を入出庫するときに生じる荷重は,(車両荷重+車載品荷重+乗員荷重)とし,前進
又は後進のいずれにおいても,この荷重のE.3.1.2 d) に規定する荷重の分配比率の大きい方が,タイ
ヤ位置に集中荷重として作用するものとする。
なお,動荷重係数γは考慮しなくてもよい。
b) 安定性の評価 作用荷重で発生するモーメントに対して,跳ね上がるおそれのある部分の可動部荷重
でのモーメントは,1.2倍以上とする。
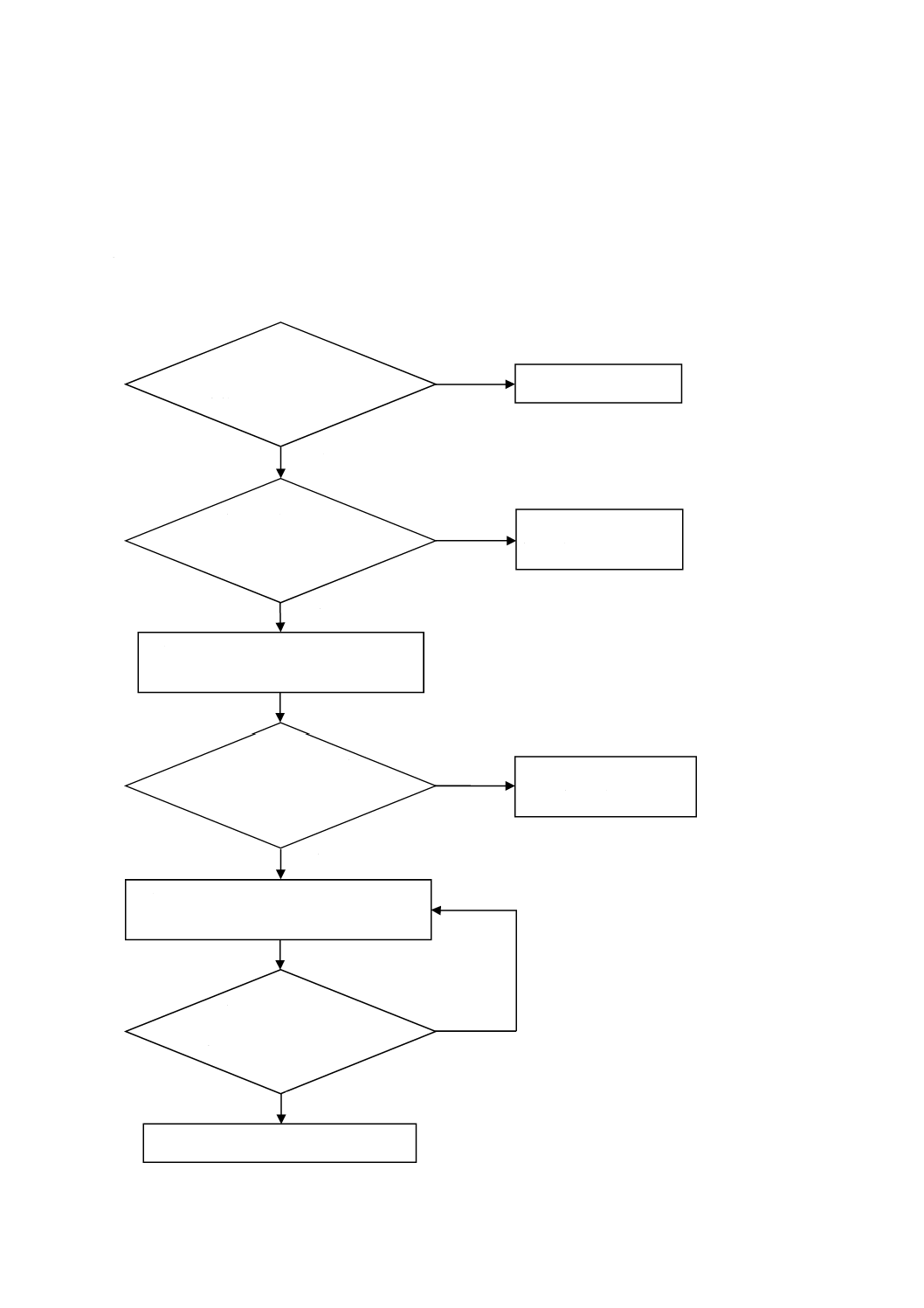
57
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(参考)
無人確認手段の選択手順
F.1
無人確認手段の選択手順
無人確認手段の選択手順を,次に示す。
いいえ
いいえ
はい
乗降領域内の無人を,確
実に検知できる技術的
方策がある
間接手段によって,乗降
領域の死角を目視確認
できる
乗降領域の死角を,無人
確認入力器の場所で目
視確認できる
乗降領域の死角を目視できる,間接手段(反
射鏡,監視モニタなど)を設ける
いいえ
乗降領域の死角となる部分を目視できる場所
に,無人確認入力器を設ける
はい
いいえ
人に頼る手段は不要
人に頼る手段(直接の目
視確認)で行う
はい
人に頼る手段(直接及び間
接の目視確認)で行う
はい
人に頼る手段(無人確認入力器)で行う
無人確認入力器
乗降領域の無人を,入出庫後に利用者が自
ら確認したことを入力する装置
乗降領域の無人を,操作
する場所で目視確認で
きる(死角はない)
58
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(規定)
自動二輪車対応の個別要求事項
G.1
一般
この附属書は,駐車台数の一部を自動二輪車対応とする(自動二輪車)混在型及び駐車台数の全部を自
動二輪車とする(自動二輪車)専用型の機械式駐車設備において,自動二輪車に対応する部分だけに適用
する。
なお,この附属書で規定していない本体及び附属書Eの規定は,自動車を自動二輪車に読み替えて,適
用する。
G.2
個別要求事項
G.2.1 乗降領域
G.2.1.1 一般事項及び乗降領域の区画
乗降領域の一般事項及び乗降領域の区画には,5.5のa),b) 及び5.5.1によるほか,次による。
搬器の一部を出入口から引き出して自動二輪車の入出庫を行う専用型及び混在型の機械式駐車設備では,
出入口から引き出した部分を自動二輪車の乗降領域とする。ただし,駐車・搬送領域又は自動車の乗降領
域となる機械式駐車装置内に利用者が立ち入らない構造で,かつ,人力によって引き出しする装置の場合
は,自動二輪車の乗降領域には,5.5のa),b) 及び5.5.1は適用しない。
G.2.1.2 自動二輪車の通過部分
自動二輪車の通過部分は,次によるものとし,5.5.2.1は適用しない。
a) 自動二輪車の通過部分の開口高さは,次による。
1) 搬器又は搬器の一部を機械式駐車装置の外に引き出して,自動二輪車の入出庫を行う機械式駐車設
備では,自動二輪車の通過する部分の開口高さは,自動二輪車の高さに50 mmを加えた寸法以上と
しなければならない。
2) 自動二輪車を人力で動かして入出庫する機械式駐車設備では,人の通路及び自動二輪車の通過する
部分は,1 900 mm以上の開口高さとする。
3) 自動二輪車に乗車して入出庫する機械式駐車設備では,自動二輪車の通過する部分は,2 100 mm以
上の開口高さとする。
b) 自動二輪車の通過部分の幅は,次による。
1) 搬器又は搬器の一部を機械式駐車装置の外に引き出して,自動二輪車の入出庫を行う機械式駐車設
備では,自動二輪車の幅に150 mmを加えた寸法以上とする。
2) 自動二輪車を人力で動かして入出庫する機械式駐車設備では,自動二輪車の幅に150 mmを加えた
寸法以上,かつ,1 000 mm以上とする。
3) 自動二輪車に乗車して入出庫する機械式駐車設備では,1 750 mm以上の幅とする。
G.2.1.3 乗降領域の人の通路
乗降領域の人の通路は,5.5.2.2のc) 1),c) 2),d) 及びe) によるほか,次による。
a) 自動二輪車用搬器が乗降領域の一部となる機械式駐車設備では,搬器上での人の通路は,自動二輪車
の左側方,又は複数台を並列する場合は自動二輪車どうしの間に設けるものとする。
59
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 搬器又は搬器の一部を機械式駐車装置の外に引き出して,自動二輪車の入出庫を行う機械式駐車設備
では,人の通路は,入出庫する自動二輪車の左側方,又は複数台を並列する場合は自動二輪車どうし
の間に設けるものとする。
c) 自動二輪車用の搬器上に限り,通路の幅は250 mm以上としてもよい。
G.2.1.4 乗降領域の床面
乗降領域の床面は,5.5.2.3によるほか,次による。
a) 自動二輪車を人力で動かす場所での人の通路及び自動二輪車の通過部分の床面の段差は,20 mmを超
えてはならない。
b) 自動二輪車の通過部分の段差をスロープにする場合は,1/12の勾配を超えないものとする。
G.2.1.5 乗降領域での自動二輪車の墜落保護
乗降領域での自動二輪車の墜落保護は,次によるものとし,5.5.2.5は適用しない。
a) 自動二輪車が墜落する高さが搬器上面から1 000 mmを超える部分が搬器奥側に又は搬器側方にある
専用型又は混在型の機械式駐車設備で,自動二輪車に乗車して入出庫するものは,次のいずれかの方
法で自動二輪車の運転の誤りによる自動二輪車の墜落を,抑止しなければならない。
1) 墜落のおそれのある開口には,自動二輪車の墜落防護柵を設けるものとする。
2) 墜落のおそれのある開口は,自動二輪車の墜落が抑止できる床材で塞ぐものとする。
b) 自動二輪車を人力で動かして入出庫する機械式駐車設備では,搬器奥側への自動二輪車の墜落は考慮
しなくてもよい。
G.2.2 機械装置
G.2.2.1 自動二輪車の駐車室
自動二輪車の駐車室は,次によるものとし,5.6.1.1のa) 及びb) は適用しない。
a) 駐車室の寸法 駐車室の寸法(防護柵などを設けた場合は内寸)は,次による。
なお,自動二輪車を1台ずつ囲うなどして,転倒,落下,又はブレーキレバーなどの突起物のはみ
出しを制限した駐車室では,この寸法以下の長さ及び幅としてもよい。
1) 駐車室の長さは,格納する自動二輪車の長さに200 mmを加えた寸法以上とする。
2) 駐車室の幅は,格納する自動二輪車の幅に150 mmを加えた寸法以上とする。
なお,一つの搬器に2台以上格納する場合,自動二輪車どうしの間は150 mmを加えた寸法以上
とする。
3) 駐車室の高さは,格納する自動二輪車の高さに50 mmを加えた寸法以上とする。
b) 開放型の機械式駐車設備では,自動二輪車用の駐車室は,地下,又は最下層の地上部分に設けるのが
よい。
G.2.2.2 通常使用の自動二輪車用搬器
通常使用の搬器は,次によるものとし,5.6.2.1は適用しない。また,次のa) 及びb) によって格納する
自動二輪車が制限を超えていない,又は停車位置が許容範囲を超えていないことが確実な場合には,5.7.7.1
は適用除外としてもよい。
a) 自動二輪車用の搬器には,自動二輪車が移動又は転倒しないように,固定具を設けなければならない。
b) 自動二輪車が転倒しない安定性を実験で証明する場合は,固定具だけの転倒保護としてもよいが,そ
れ以外では,防護柵などを併用して転倒,及び搬器外への落下を抑止する。
c) 保守,検査などの作業床として人を乗せて作動することを意図する搬器には,搬器の中央付近に想定
する人数と同数で,座位の使用に適した安全帯係留金具を設けなければならない。
60
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.2.2.3 出入口扉の操作
出入口扉の操作は,5.7.2.3によるが,a) 2) は適用しない。
G.2.3 強度及び安定性
G.2.3.1 積載荷重の分類
積載荷重の分類は,次によるものとし,E.3.1.2は適用しない。
a) 車両荷重 自動二輪車の空車状態での車両質量(3.28参照)による荷重とする。
b) 車載品荷重 自動二輪車の車載荷重は,考慮しなくてもよい。
c) 乗員荷重 自動二輪車乗員の質量による荷重とし,次のいずれかによる。
1) 自動二輪車を人力で動かして入出庫する機械式駐車設備では,750 Nの乗員荷重が,自動二輪車の
脇を歩行する人の位置に作用するものとする。
2) 自動二輪車に乗車して入出庫する機械式駐車設備では,750 Nの乗員荷重が,自動二輪車を介して
作用するものとする。
d) 自動二輪車の荷重の分配 自動二輪車の車両荷重,及び乗車して入出庫する機械式駐車設備の乗員荷
重は,自動二輪車の前輪側と後輪側とで5:5に分配し,タイヤ位置に集中荷重として作用するものと
する。
G.2.3.2 自動二輪車の平均荷重
自動二輪車には平均荷重(E.3.2参照)を適用してはならないが,混在型の自動車には適用してもよい。
G.2.3.3 風荷重の算出
自動二輪車の風荷重の計算は,E.4.1.1によるものとし,混在型の自動車対象部分に対してもE.4.1.2を
用いてはならない。
G.2.3.4 駐車している自動二輪車の安定性
駐車している自動二輪車の安定性は,次による。
a) 風荷重に対する安定性 駐車している自動二輪車に対して,E.4.2は適用除外とするが,風荷重で発生
するモーメントは車重で得られる抵抗モーメントよりも小さく,風荷重で自動二輪車が転倒によって
落下するおそれがないことを,E.4.2のa)〜c) を参考にして確認しなければならない。
なお,転倒のおそれがある場合は,自動二輪車が搬器から落下しないように,保護設備を設けるも
のとし,保護設備の発生応力は,短期許容応力以下とする。
b) 地震荷重に対する安定性 駐車している自動二輪車が,地震荷重で転倒して落下するおそれがないこ
とを,E.5で確認する。E.5.1 c) の地震動波形は正弦波としてもよいが,振動数は自動二輪車の固有周
期とし,入力レベルは地震動波形と同範囲とする。
なお,転倒のおそれがある場合は,自動二輪車が搬器から落下しないように,保護設備を設けるも
のとし,保護設備の発生応力は,短期許容応力以下とする。
G.2.3.5 自動二輪車の通過部分及び乗降領域の床部分並びに人の通路部分(入出庫時)の強度
自動二輪車の通過部分及び乗降領域の床部分並びに人の通路部分の強度は,次による。
a) 自動二輪車に対応する部分には,5.6.6.1 a) の規定は適用除外とし,次による。
乗降領域の自動二輪車の通過部分,搬器及び人の通路,並びに自動二輪車の転落する高さが搬器上
面から1 000 mmを超える部分のある搬器奥側と搬器側方の床部分は,入出庫の自動二輪車及び人に
対して必要な強度をもつものとする。
b) 自動二輪車の通過部分の強度は,E.7.2.1 a) を適用するが,動荷重係数γの値は,乗車して入出庫する
場合は1.2以上に,人力で動かす場合は1.0以上に変更する。
61
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 乗車して入出庫する機械式駐車設備で,床の奥行きが600 mmを超える搬器奥側の床部分[G.2.1.5 a)
参照]の強度は,次によるものとし,E.7.2.1 b) は適用しない。
1) 駐車可能な自動二輪車の寸法によって,前輪及び後輪の両方又は前輪のいずれが載るのかを確認す
る。
2) 作用する荷重は,床部分の質量による荷重に,両輪が載るおそれがあるときは,γ×(車両荷重+乗
員荷重)の100 %を,片輪だけ載るおそれがある場合は50 %を乗じた荷重を加えるものとする。
3) 用いる動荷重係数γの値は1.2以上とし,発生応力は短期許容応力以下とする。
d) 乗車して入出庫する機械式駐車設備で,床の幅が600 mmを超える搬器側方の床部分[G.2.1.5 a) 参照]
の強度は,次によるものとし,E.7.2.1 c) は適用しない。
1) 乗車して入出庫する場合は,固定部荷重又は可動部荷重にγ×(車両荷重+乗員荷重)を加えた荷
重とする。
2) 用いる動荷重係数γの値は1.2以上とし,発生応力は短期許容応力以下とする。
e) 人の通路部分の強度は,E.7.2.1 d) を適用する。
G.2.3.6 搬送装置,旋回装置などの装置部分及び搬器(作動時)の強度
作動時の搬送装置,旋回装置などの装置部分及び搬器の強度は,E.7.2.2を適用する。
G.2.3.7 支持構造物(静止時)の強度
静止時の支持構造物の強度は,E.7.2.3のa) を除き適用する。
なお,a) に代わる規定は,次による。
装置全体又は駐車室の支持構造物は,専用型又は混在型の自動二輪車の駐車室全てに,最大車重の自動
二輪車を格納しているものとする。
なお,混在型では自動車の駐車室全てに,最大車重の自動車を格納しているものとするが,複数の自動
車を格納した状態では,車両荷重に自動車の平均荷重を用いてもよい。
G.2.3.8 支持構造物[静止時(風)]の強度
静止時風荷重に対する支持構造物の強度は,E.7.2.4のa) を除き適用する。
なお,a) に代わる規定は,次による。
装置全体又は駐車室の支持構造物は,専用型又は混在型の自動二輪車の駐車室全てに,最大車重の自動
二輪車を格納しているものとする。
なお,混在型では自動車の駐車室全てに,最大車重の自動車を格納しているものとするが,複数の自動
車を格納した状態では,車両荷重に自動車の平均荷重を用いてもよい。
G.2.3.9 支持構造物[静止時(地震)]の強度
静止時地震荷重に対する支持構造物の強度は,E.7.2.5のa) を除き適用する。
なお,a) に代わる規定は,次による。
装置全体又は駐車室の支持構造物は,専用型又は混在型の自動二輪車の駐車室全てに,最大車重の自動
二輪車を格納しているものとする。
なお,混在型では自動車の駐車室全てに,最大車重の自動車を格納しているものとするが,複数の自動
車を格納した状態では,車両荷重に自動車の平均荷重を用いてもよい。
G.2.4 視覚シグナル及び聴覚シグナル
自動二輪車に対応する視覚シグナル及び聴覚シグナルは,5.9を適用するが,5.9 b) は適用を除外しても
よい。
G.2.5 表示及び標識
62
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表示及び標識は,7.3を適用し,更に次の規定を追加する。
なお,混在型では自動車と自動二輪車とで一つの表示及び標識としてもよい。
a) 7.3.1に関連の追加規定は,次による。
専用型及び混在型の機械式駐車設備の駐車場入口,前庭などには,自動二輪車対応の機械式駐車設
備である表示をする。
b) 7.3.5に関連の追加規定は,次による。また,専用型には7.3.5 d) を適用しない。
自動二輪車の固定具[G.2.2.2 a) 参照]には,歩行する人に注意を促すマーキングをする。
63
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(規定)
車椅子使用者対応の個別要求事項
H.1 一般
この附属書は,利用者及び取扱者に車椅子使用者を含む機械式駐車設備の個別要求事項について規定す
る。この個別要求事項が本体又は関連する附属書の規定と異なる場合は,この個別要求事項を優先する。
なお,車椅子使用者対応は,駐車台数の全部又は一部のいずれでもよい。
H.2 個別要求事項
H.2.1 前庭
前庭は5.2によるほか,次による。
車椅子使用者対応の前庭は,自動車の両側方に奥行(車長方向)が1 700 mm以上,幅(車幅方向)が1 400
mm以上の自動車への乗降部分を確保する。また,自動車への乗降部分には,屋根を設けるのがよい。
H.2.2 乗降領域の人の通路
乗降領域の人の通路は,5.5.2.2のb),d) 及びe) を適用し,a) 及びc) に代わる規定は,次による。
a) 通路の位置 乗降領域の車椅子使用者の通路は,自動車の両側方に設けなければならない。
b) 通路の幅 乗降領域の人の通路の幅は,次による。
1) 自動車の両側方に,奥行(車長方向)が1 700 mm以上,幅(車幅方向)が1 400 mm以上の自動車
への乗降部分を設けるものとする。
なお,自動車への乗降部分には,屋根を設けるのがよい。
2) 乗降領域の通路の内のり幅及び床面の幅は,900 mm以上とする。
3) 乗降領域の自動車の前角部が車椅子使用者の通路に接する場合は,前角部に250 mm×250 mmの平
面すみ切りを想定してもよい。
4) 乗降領域の通路には,手すりを設けるのがよい。
H.2.3 乗降領域の床面
乗降領域の床面は,5.5.2.3のc) を適用し,a) 及びb) に代わる規定は,次による。
a) 床面の隙間 乗降領域で人の通路とする場所の床の隙間は,20 mm以下とする。
b) 床面の段差及び凹凸 乗降領域で人の通路とする場所の床面の段差及び凹凸は,次による。
1) 車椅子使用者の通路となる床面の段差は20 mm以下とし,段差が20 mmを超え160 mmまでは1/8
以下の勾配の,これを超える段差では1/12以下の勾配の,傾斜路としなければならない。
2) 床面の凹凸は,5.5.2.3 b) の2) を適用する。
H.2.4 通路扉,非常用扉及び作業用扉
通路扉,非常用扉及び作業用扉は,5.3.3によるほか,車椅子使用者が利用する可能性のある通路扉及び
非常用扉は,幅が900 mm以上で,高さが1 900 mm以上の開口寸法とする。
H.2.5 操作盤
操作盤は,5.7.1.6によるほか,次による。
a) 車椅子使用者が取扱者になることを想定する機械式駐車設備では,操作盤の少なくとも一つは,床面
から1 000 mm程度の高さとしなければならない。
64
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 前庭の長さの制約で,出入口扉と前庭に停車した自動車との隙間が900 mm未満となる場合は,車椅
子使用者用の操作盤は,出入口扉の両側方に設けるのがよい。
H.2.6 非常停止
非常停止は,5.7.5.2によるほか,乗降領域の通路部分の非常停止機器は,2 000 mm以下の間隔で,床面
から1 000 mm程度の高さに設けるものとする。
H.2.7 通信アンテナ
車椅子使用者が他の人と連絡するための方策は,5.10によるほか,管理責任者,保守会社などに連絡す
るための通報設備を,操作盤付近に設けるのがよい。
H.2.8 表示及び標識
H.2.8.1 駐車可能な自動車の表示
駐車可能な自動車の表示は,7.3.1によるほか,駐車場入口,前庭などには,車椅子使用者対応の機械式
駐車設備の表示をする。
H.2.8.2 機械式駐車設備へのマーキング及び標識(絵文字)
機械式駐車設備へのマーキング及び標識(絵文字)は,7.3.5によるほか,次による。
a) 車椅子使用者対応の機械式駐車設備では,歩行する人の通路よりも車椅子使用者を優先する,人の通
路のマーキングとする。
b) 車椅子の転回場所を示す必要がある場合は,推奨する転回場所をマーキングする。
c) 駐車台数の一部を車椅子使用者対応とする場合は,車椅子使用者対応の搬器が識別できるように,対
応している搬器にマーキングする。
d) 車椅子使用者の移動に適した通路又は経路がある場合は,その表示をするのがよい。
65
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書I
(規定)
乗降領域で同乗者を乗降してもよい機械式駐車設備の個別要求事項
I.1
一般
この附属書は,利用者と同乗者とが,乗降領域で自動車に乗降してもよいとする,バース式機械式駐車
設備の個別要求事項について規定する。この個別要求事項が本体又は関連する附属書の規定と異なる場合
は,この個別要求事項を優先する。
I.2
個別要求事項
I.2.1
一般事項
一般事項は,次による。
a) 乗降領域で同乗者を乗降してもよいとする機械式駐車装置は,5.5.1.1のe) 又はf) の乗降領域を備え
る機械式駐車設備だけとする。
b) 乗降領域で乗降してもよいとする同乗者は,健常な大人又は子供,車椅子を使用する大人又は子供,
抱きかかえの幼児又は乳児,ベビーカーに乗る幼児又は乳児,障がい者又は高齢者など(ただし,重
篤な人には介護者がいるのを条件とする。)を想定している。
c) 乗降領域で同乗者を乗降してもよいとする機械式駐車設備は,附属書Hの車椅子使用者対応の個別要
求事項を満たさなければならない。ただし,H.2.2 b) 1) の第1文を,“自動車のどのドアからでも人が
乗降できるように,自動車の両側方に幅1 400 mm以上の乗降部分を設けるものとする”,に置き換え
る。
I.2.2
自動車の通過部分,人の通路及び待合場所
自動車の通過部分,人の通路及び待合場所は,次による。
a) 入庫入場又は出庫退場するための自動車の車路と,利用者及び同乗者の歩行路とは,交差しない構造
とするのがよい。
b) 入庫又は出庫のための利用者及び同乗者の待合場所,及び乗降領域に接する通路は,入庫又は出庫す
る自動車の進行方向には設けないものとする。ただし,設備配置の制約から自動車の進行方向に待合
場所を設ける場合は,運転を誤った自動車の進入を阻止するために,防護柵,防護壁などを設けるも
のとする。
I.2.3
乗降領域
乗降領域は,次による。
a) 乗降領域の床の隙間は,10 mm以下としなければならない。
b) 乗降領域の固定の囲いの設置可能な範囲には,人の歩行を補助するための手すりを設けるものとする。
c) 操作盤の位置及び囲いの構造は,取扱者が操作盤で操作するときに,乗降領域に自動車がないときは
乗降領域のほぼ全域が,自動車があるときは自動車と区画扉との間が,直接目視できるものとするの
がよい。
I.2.4
表示及び標識
I.2.4.1
表示
入庫入場又は出庫退場するための自動車の車路と,利用者及び同乗者の歩行路とが交差する場合は,人
66
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
又は自動車の移動を制限するための遮断機,信号機などを設けるのがよい。
I.2.4.2
機械式駐車設備へのマーキング及び標識(絵文字)
人が横断してもよいとする車路路面には,横断歩道を示すマーキングをするのがよい。
I.2.4.3
情報提供
次の事項を,注意表示又は取扱説明書で情報提供するのがよい。
a) つまずき,足をとられるなどによる,歩行での転倒リスク
b) つまずき,つえ先の落込みなどによる,補助具(つえなど)を使用する歩行での転倒リスク
c) 障がいの部位及び障がいの程度による,危険回避の行動遅れのリスク
d) 介助者と被介助者とがいるときに,両者が共に危険回避の行動がとれないリスク
e) 下方開きの扉の突き上げリスク
f)
介助者による,障がい者などのリスク低減
g) 履物(例えば,平底靴)による,歩行のリスク低減
67
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書J
(規定)
電気自動車(EV)対応の個別要求事項
J.1
一般
この附属書は,電気自動車対応の機械式駐車設備の個別要求事項について規定する。この個別要求事項
が本体又は関連する附属書の規定と異なる場合は,この個別要求事項を優先する。
なお,電気自動車対応とは駐車中に充電できるものをいい,充電しない電気自動車の駐車には適用しな
い。また,電気自動車対応は,駐車台数の全部又は一部のいずれでもよい。
J.2
個別要求事項
J.2.1
乗降領域の人の通路
乗降領域の人の通路は,5.5.2.2によるほか,次による。
a) 通路の位置 乗降領域の人の通路は,5.5.2.2 a) に,次を追加する。
さらに,電気自動車の充電口側には,通路を設けなければならない。
b) 通路の幅 乗降領域の人の通路の幅は,5.5.2.2 c) に,次を4) として追加する。
搬器上を通路とする機械式駐車設備の電気自動車の充電口側の通路は,充電ケーブルの接続作業で
の歩行,及び充電ケーブル接続状態での歩行においては,250 mm以上の通路幅としてもよい。
J.2.2
電源
電源は,5.7.1.1によるほか,次による。
a) 電気自動車1台ごとに,漏電遮断器を設けるものとする。
b) 漏電遮断器及び充電用コンセントは,電気自動車への充電設備の要求に適合するものとする。
c) 充電のための作業に利用者が使用する機器及び配線は,電気自動車への充電設備の要求に適合するも
のとする。
d) 機械式駐車設備の電源は,充電中に機械式駐車設備を作動させても不足のない容量とする。
e) 充電電源は,電気自動車への悪影響を避けるために,頻繁に接続及び切断しないものとする。
J.2.3
感電保護
感電保護は,5.7.1.2によるほか,次による。
a) 複数の充電用機器が隣接する機械式駐車設備では,搬器と対応する充電用機器以外に充電ケーブルを
接続しないように,搬器ごとに専用の充電用コンセント(鍵付きのコンセント箱とするのがよい。)を
設けるものとする。
b) 屋外に設置される充電用コンセントは,雨水の浸入を防ぐためにカバーなどを設けるものとする。
J.2.4
充電用コンセントの位置
充電用コンセントの位置は,次による。
a) 搬器の充電用コンセントの位置は,充電ケーブルの接続作業が容易に行えるように,電気自動車の充
電口の位置を考慮して決定する。
b) 充電用コンセントは,歩行の妨げにならない場所に設けるものとする。
J.2.5
充電用機器のはみ出し制限
電気自動車への充電を行うために充電ケーブルを接続した場合は,給電ガン,給電口の蓋,充電ケーブ
68
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ルなどが搬器からはみ出さないようにしなければならない。はみ出しを制限するための方法例を,次に示
す。
a) 電気自動車の停止位置を規制して,充電用機器のためのスペースを確保する。
b) 搬器から充電ケーブルがはみ出さないよう,ケーブル固定具で固定する。
c) 搬器から充電ケーブルがはみ出さないよう,充電ケーブルの敷設場所をマーキングする。
d) 充電ケーブルを搬器からはみ出さないようにする,搬器上を含む乗降領域に使用しない充電ケーブル
を放置しないことなどの利用者への注意事項を表示する,又は取扱説明書に記載する。
J.2.6
表示及び標識
J.2.6.1
駐車可能な自動車の表示
駐車可能な自動車の表示は,7.3.1によるほか,次による。
a) 機械式駐車場入口,前庭などに,電気自動車対応の機械式駐車設備であることを表示する。
b) 電気自動車対応の車種,車重及び寸法が,他の駐車できる自動車の制限と異なる場合は,それぞれを
表示する。
J.2.6.2
作業中表示
充電ケーブルの接続作業又は取外し作業時は,操作盤に作業中の表示をする。また,可能であれば,充
電ケーブルの接続作業又は取外し作業を完了した後に,機械式駐車設備が起動するよう,インタロック機
能を設けるのがよい。
69
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書K
(規定)
方向転換装置の個別要求事項
K.1 一般
この附属書は,方向転換装置について規定する。方向転換装置は機械式駐車設備を構成する装置の一つ
として,又は方向転換だけの用途として設ける場合があるが,いずれの用途にも適用する。
なお,方向転換装置は,自動車(3.24参照)だけでなく,重量車も対象とする。
K.2 用語及び定義
この附属書で用いる主な用語及び定義は,次による。
K.2.1
重量車
駐車可能な自動車以外のバス,トラックなどの自動車。車路に設ける方向転換装置では,重量車を転向
する又は重量車が通過することがある。
K.2.2
車両総質量
空車状態の車両質量に,積載質量,乗員質量などを加えた質量。
K.3 個別要求事項
K.3.1 機械設備
K.3.1.1 設置場所
方向転換装置の設置場所は,次による。
a) 旋回床直径の外周端と,及び旋回床上の自動車・重量車の外端と周囲の壁などとの隙間は,50 mm以
上とする。
b) 方向転換装置を隣接して設ける場合は,旋回床上の自動車・重量車どうしが接触しないように,50 mm
以上の隙間を設けるものとする,又は方向転換装置どうしが同時に作動しない(K.3.2.3参照)ものと
する。
c) 方向転換装置の周囲に,人が墜落するおそれのある場所の高さが床面から500 mmを超える場所があ
る場合には,高さ1 100 mm以上で,110 mmの球体が通過できない内寸の縦桟の,防護柵を設けるも
のとする。
K.3.1.2 床面
方向転換装置の床面は,次による。
a) 旋回床直径の外端と固定床との隙間は,20 mm以下とするが,構造上避けられない場合は40 mm以下
としてもよい。ただし,隙間が20 mmを超える場合は,旋回床直径の外端と固定床とのいずれかの端
部に,注意を促すマーキングをする。
なお,車椅子対応の機械式駐車設備では,20 mm以下の隙間としなければならない。
b) 旋回床外周端と固定床との段差,及び旋回床面の段差及び凹凸は,6 mm以下する。ただし,構造上
避けられない場合は,20 mm以下とする。
70
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
K.3.1.3 旋回床
方向転換装置の旋回床は,次による。
a) 通過する自動車・重量車の車輪からの荷重,及び方向転換する自動車・重量車の車輪からの荷重が作
用したときに,旋回床外周端は落込み又は跳ね上がりを抑制し,旋回床外周端の降下は50 mmを超え
てはならない。
b) 旋回床又は固定床には,駆動装置及び支持装置の保守作業のために,点検口及び点検スペースを設け
るものとする。
c) 旋回床面は,材料,加工,塗装などによって,滑りにくいものにする。
K.3.2 電気設備
K.3.2.1 操作場所
方向転換装置の操作場所は,次による。
a) 方向転換装置の操作盤は,方向転換装置の周囲に人がいないことを直接目視できる,又は目視と同等
の手段(例えば,反射鏡,監視モニタ映像など)で確認できる場所に設けるものとする。
b) 方向転換装置又は方向転換装置上の自動車・重量車と周囲の壁などとの間で人の押し潰しのおそれが
ある場所が,自動車・重量車に乗車している利用者の直接の目視又は自動車・重量車の後写鏡で確認
できる場合には,利用者が自動車・重量車に乗車したままケーブルレス操作盤(リモコン)で,方向
転換装置を作動してもよい。
K.3.2.2 操作盤及びケーブルレス操作盤(リモコン)
操作盤及びケーブルレス操作盤は,次による。
a) 操作盤及びケーブルレス操作盤(リモコン)には,例外なく(例えば,ホールド・ツゥ・ラン制御で
あっても)取扱者が操作するための,停止制御器を備えるものとする。
b) 操作盤及びケーブルレス操作盤(リモコン)に設ける停止制御器は,他の操作部と容易に識別できる
配色及び表示とする。
c) ケーブルレス操作盤(リモコン)に設ける停止制御器は,一つの操作で停止する操作部とする。
K.3.2.3 作動制御
作動制御は,次による。
a) 方向転換装置の旋回周速度は600 mm/s以下とする。ただし,旋回周速度は,旋回床上の自動車・重量
車の外端旋回円又は旋回床直径の大きい方の(最大軌跡円)周速度とする。
b) 方向転換装置は単動制御とし,他の機械式駐車設備と連動する自動制御としてはならない。
c) 隣接した方向転換装置が同時に作動したときに,旋回床上の自動車・重量車どうしが接触するおそれ
のある場合は,方向転換装置どうしが同時に作動しないように,インタロック機能を設けるものとす
る。
K.3.2.4 照度
照度は,次による。
a) 方向転換装置及びその周囲は,人がいないことを確実に視認できるように,屋内では平均照度50 lx
(照度範囲は30〜75 lxとするのがよい。)以上とし,屋外では平均照度20 lx(照度範囲は10〜30 lx
とするのがよい。)以上とする。
b) 操作盤の表示部及び操作部は,平均照度20 lx(照度範囲は10〜30 lxとするのがよい。)以上とする。
K.3.3 強度及び安定性
強度及び安定性は,附属書Eを適用するが,E.3.2,E.4及びE.7.2〜E.7.4は適用しない。
71
B 9991:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
K.3.3.1 荷重の分類
荷重の分類は,E.3.1.1及びE.3.1.3を適用し,E.3.1.4は適用しない。
なお,E.3.1.2に代えて,次を適用する。
a) 車両荷重 自動車は空車状態の車両質量(3.28参照),重量車は車両総質量による荷重とする。
なお,転向する車両と通過する車両との荷重が異なる場合は,それぞれの荷重で設計してもよい。
b) 車載品荷重 車両質量を用いる場合は,車載品荷重は500 Nとし,車両総質量を用いる場合は考慮し
なくてもよい。
c) 乗員荷重 車両質量を用いる場合は,乗員荷重は2 200 Nとし,車両総質量を用いる場合は考慮しな
くてもよい。
d) 荷重の分配 車両質量を用いる場合は,前輪側と後輪側とで6:4に分配する。ただし,6:4の荷重
分配が適さない自動車は,その自動車に適した分配を考慮してよいが,分配比率の大きい方は6以上
とする。
なお,荷重はタイヤ位置に集中荷重として作用するものとする。
K.3.3.2 自動車・重量車通過時の旋回床の強度
自動車・重量車通過時の旋回床の強度は,次による。
a) 鉛直荷重に対する強度 旋回床及び支持装置の鉛直荷重に対する強度は,可動部(旋回床)荷重に,
車両質量を用いた場合はγ×(車両荷重+車載品荷重+乗員荷重)を,車両総質量を用いた場合はγ
×車両総質量を加えた荷重とし,発生応力は長期許容応力以下とする。
なお,動荷重係数γの値は,1.2以上とする。
b) 水平荷重に対する強度 水平荷重を受ける旋回床,支持装置,アンカーボルトなどの水平荷重に対す
る強度は,a) の荷重に0.1を乗じた水平荷重が作用するものとし,発生応力は長期許容応力以下とす
る。
K.3.3.3 方向転換時の旋回床強度
方向転換装置作動時の旋回床及び支持装置の鉛直荷重に対する強度は,可動部(旋回床)荷重に車両質
量を用いた場合は(車両荷重+車載品荷重+乗員荷重)を,車両総質量を用いた場合は車両総質量を加え
た荷重とし,発生応力は長期許容応力以下とする。
なお,動荷重係数は考慮しなくてもよい。
K.3.3.4 支持構造物の地震時強度
旋回床が落下するおそれのある高さが2 000 mmを超える方向転換装置は,装置の質量(固定部荷重+
可動部荷重)に対して地震荷重(E.5参照)が作用するときに,支持装置及びアンカーボルトの部分の発
生応力は,短期許容応力以下としなければならない。
K.3.3.5 旋回床の安定性
旋回床の外周端に最大輪荷重が作用したとき,旋回床端の落込み又は跳ね上がりに対する安定性の確認
は,次による。
a) 車両質量の場合は(車両荷重+車載品荷重+乗員荷重)を分配したときの前輪荷重,車両総質量の場
合は最大軸荷重を車輪に分配したときの最大輪荷重を,作用荷重とする。
なお,動荷重係数γは,考慮しなくてもよい。
b) 作用荷重で発生する跳ね上がりモーメントに対して,旋回床の質量によるモーメントは,1.2倍以上と
する。