B 9712:2006 (ISO 13851:2002)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 両手操作制御装置のタイプ及びその選択 ··············································································· 4
5 安全機能の特性 ················································································································ 5
5.1 両手の使用(同時操作) ································································································· 5
5.2 入力信号と出力信号間の関係 ··························································································· 5
5.3 出力信号の停止 ············································································································· 5
5.4 偶発的操作の防止 ·········································································································· 5
5.5 機能不良の防止 ············································································································· 6
5.6 出力信号の再開始 ·········································································································· 6
5.7 同期操作計 ··················································································································· 6
6 制御のカテゴリに関連する要求事項 ····················································································· 6
6.1 カテゴリの選択 ············································································································· 6
6.2 カテゴリ1の使用 ·········································································································· 7
6.3 カテゴリ3の使用 ·········································································································· 7
6.4 カテゴリ4の使用 ·········································································································· 7
7 プログラマブル電子システムの使用 ····················································································· 7
8 偶発的操作及び機能不良の防止 ··························································································· 8
8.1 共通の考慮 ··················································································································· 8
8.2 片手の使用による機能不良の防止······················································································ 8
8.3 同一の腕と肘の使用による機能不良の防止 ·········································································· 8
8.4 前腕(複数)又は肘(複数)の使用による機能不良の防止 ····················································· 8
8.5 片手と人体の他の部位(例えば,膝,腰)の使用による機能不良の防止 ··································· 9
8.6 片方の制御操作器を操作状態にブロックすることによる機能不良の防止 ··································· 9
8.7 偶発的操作 ··················································································································· 9
9 一般要求事項 ··················································································································· 9
9.1 人間工学要求事項 ·········································································································· 9
9.2 操作条件及び環境影響 ·································································································· 10
9.3 エンクロージャ ··········································································································· 10
9.4 制御操作器の選択,設計及び据付···················································································· 10
9.5 加速度による意図しない出力信号の防止··········································································· 10
9.6 可動式及び携行式手持ち機械の意図しない操作 ·································································· 10
B 9712:2006 (ISO 13851:2002)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.7 可動式両手操作制御装置 ······························································································· 10
9.8 安全距離 ···················································································································· 11
10 検証 ··························································································································· 11
10.1 検証のための一般要求事項 ··························································································· 12
10.2 目視検査 ··················································································································· 13
10.3 性能チェック ············································································································· 13
10.4 計測 ························································································································· 13
10.5 機能不良の防止 ·········································································································· 13
11 マーキング ·················································································································· 13
12 据付,使用及び保全上の情報 ·························································································· 14
12.1 情報に関する規定 ······································································································· 14
12.2 据付のための指示事項 ································································································· 14
12.3 使用のための指示事項 ································································································· 14
12.4 保全のための指示事項 ································································································· 15
附属書A(規定)機能不良防止のための計測試験 ····································································· 16
附属書B(参考)両手操作制御装置のタイプにおけるカテゴリ(JIS B 9705-1:2000による)の使用 ··· 21
参考文献 ···························································································································· 22
B 9712:2006 (ISO 13851:2002)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本機械工業連合会(JMF)から,工
業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,厚生
労働大臣及び経済産業大臣が制定した日本工業規格である。この規格は,著作権法で保護対象となってい
る著作物である。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。厚生労働大臣,経済産業大臣及び日本
工業標準調査会は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願
公開後の実用新案登録出願にかかわる確認について,責任をもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 9712:2006
(ISO 13851:2002)
機械類の安全性―両手操作制御装置―機能的側面及
び設計原則
Safety of machinery―Two-hand control devices―functional aspects and
design principles
序文
この規格は,2002年に第1版として発行されたISO 13851,Safety of machinery―Two-hand control devices
―functional aspects and design principlesを基に,技術的内容及び対応国際規格の構成を変更することなく作
成した日本工業規格である。
1
適用範囲
この規格は,両手操作制御装置の安全要求事項及び入力信号に対する出力信号の従属性について規定す
る。
この規格は,安全を達成するための両手操作制御装置の主な特性を規定し,3種類の機能的特性の組合
せを示す。この規格は,イネーブル装置,ホールド・トゥ・ラン装置及び特別な制御装置として使用され
ることを意図した装置には適用しない。
この規格は,両手操作制御装置がどの機械に使用されなければならないかについては規定しない。どの
タイプの両手操作制御装置を使わなければならないかについても規定しない。さらに,両手操作制御装置
と危険区域間の距離を規定しない(9.8参照)。
この規格は,両手操作制御装置の評価,機能不良の防止及び不具合の回避を含む両手操作制御装置の設
計及び(リスクアセスメントに基づく)選択に関する要求事項及び指針を提供する。またこの規格は,プ
ログラマブル電子システムを内蔵する両手操作制御装置のための要求事項及び指針を提供する(箇条7参
照)。
この規格は,使用するエネルギー源は問わず,次を含むすべての両手操作制御装置に適用される。
− 機械の統合部分又は統合部分ではない両手操作制御装置
− 一つ以上の分離要素から構成される両手操作制御装置
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 13851:2002,Safety of machinery―Two-hand control devices―functional aspects and design
principles (IDT)
なお,対応の程度を表す記号(IDT)は,ISO/IEC Guide 21に基づき,一致していることを示す。
2
引用規格
次に掲げる規格(国際規格)は,この規格に引用されることによって,この規格の規定の一部を構成す
る。
2
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
これらの引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追
補を含む。)には適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9700-1:2004 機械類の安全性―設計のための基本概念,一般原則―第1部:基本用語,方法論
注記 対応国際規格:ISO 12100-1:2003 Safety of machinery―Basic concepts, general principles for
design―Part1:Basic terminology and methodology(IDT)
JIS B 9700-2:2004 機械類の安全性―設計のための基本概念,一般原則―第2部:技術原則
注記 対応国際規格:ISO 12100-2:2003 Safety of machinery―Basic concepts, general principles for
design―Part2:Technical principles(IDT)
JIS B 9702:2000 機械類の安全性−リスクアセスメントの原則
注記 対応国際規格:ISO 14121:2000 Safety of machinery―Principles of risk assessment(IDT)
JIS B 9705-1:2000 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
注記 対応国際規格:ISO 13849-1:1999 Safety of machinery―Safety-related parts of control systems
―Part1: General principles for design(IDT)
JIS B 9960-1:1999 機械類の安全性−機械の電気装置−第1部:一般要求事項
注記 対応国際規格:ISO 60204-1:1997 Safety of machinery―Electrical equipment of machines― Part
1: General requirements(MOD)
JIS B 9715:2006 機械類の安全性−人体部位の接近速度に基づく保護設備の位置決め
注記 対応国際規格:ISO 13855:2002 Safety of machinery―Positioning of protective equipments with
respect to the approach speeds of the parts of human body(IDT)
ISO/FDIS 9355-3, Safety of machinery―Ergonomic requirements for the design of signals and control
actuators ‒ Part3:Control actuators
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
両手操作制御装置(Two-hand control device)
危険が存在する間に機械の運転を開始し,かつ運転を維持するために,少なくとも両手による同時操作
を必要とする装置で,機械を操作する人だけの保護方策となるもの。
3
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
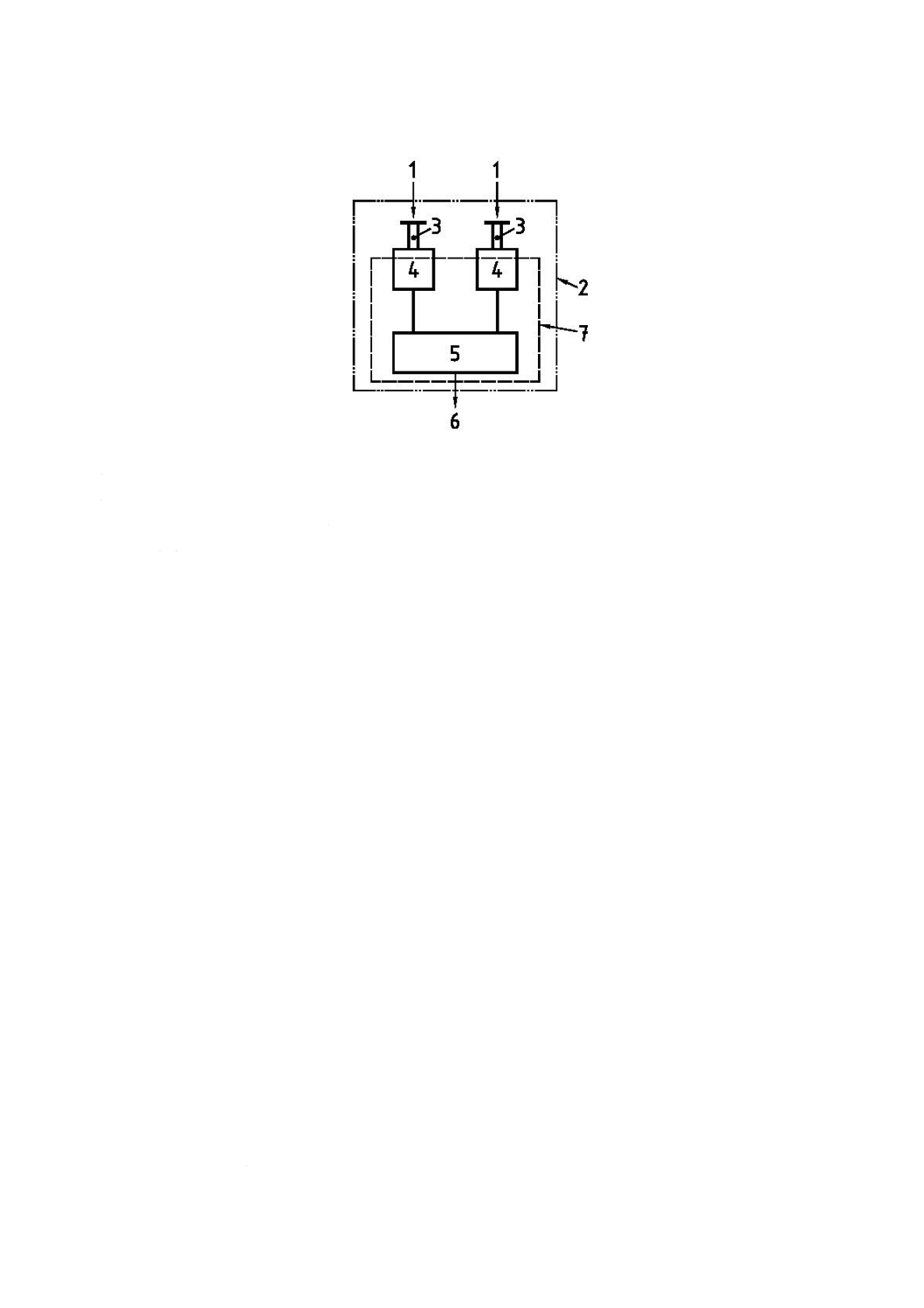
記号の説明
1 入力信号
5 シグナルプロセッサ
2 両手操作制御装置
6 出力信号
3 制御操作器
7 論理ユニット
4 信号変換器
図1―両手操作制御装置の構成図
3.2
入力信号(Input signal)
手により,制御操作器に入力される外部操作信号(図1参照)。
3.3
制御操作器(Control actuating device)
一方の手からの入力信号を検知し,それを信号変換器に伝達する両手操作制御装置の構成品(図1参照)。
3.4
同時操作(Simultaneous actuation)
一方の入力信号の開始と,もう一方の入力信号の開始の間にタイムラグが存在する場合で,同時期中の
両方の制御操作器の連続的な操作(図2参照)。
3.5
同期操作(Synchronous actuation)
一方の入力信号の開始と,他方の入力信号の開始間のタイムラグが0.5秒と同等又はそれ以下である同
時操作(図3参照)。
3.6
信号変換器(Signal converter)
制御操作器からの入力信号を受け,この信号をシグナルプロセッサが受け入れできる形式に変換及び/
又は伝達する両手操作制御装置の構成品(図1参照)。
3.7
シグナルプロセッサ(Signal processor)
二つの入力信号の結果として,出力信号を生成する両手操作制御の部分(図1参照)。
4
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.8
出力信号(Output signal)
制御される機械類に送られる,両手操作制御装置によって生成される信号。一対の入力信号に基づいて
いる(図1参照)。
3.9
応答時間(Response time)
制御操作器の解放と出力信号の停止の間の時間(9.8参照)。
3.10
可動式両手操作制御装置(Mobile two-hand control device)
移動可能な装置であり,その装置が制御する機械の危険区域に対して相対的な一か所以上の決められた
位置で使用されるもの。
4
両手操作制御装置のタイプ及びその選択
両手制御装置のタイプは,表1の三つとする。表1は,両手操作制御装置のそれぞれのタイプの安全性
に関する機能的特性及び最低限の方策を示す。すべての両手操作制御装置はJIS B 9700-1,JIS B 9700-2
及びJIS B 9960-1の関連部分に適合しなければならない。
表1―両手操作制御装置のタイプ及び最低限の安全要求事項のリスト
要 求 事 項
適用箇条
タイプ
Ⅰ
Ⅱ
Ⅲ
A
B
C
両手の使用(同時操作)
5.1
×
×
×
×
×
入力信号と出力信号間の関係
5.2
×
×
×
×
×
出力信号の停止
5.3
×
×
×
×
×
偶発的操作の防止
5.4
×
×
×
×
×
機能不良の防止
5.5
×
×
×
×
×
出力信号の再開始
5.6
*
×
×
×
×
同期操作
5.7
×
×
×
カテゴリ1の使用 (JIS B 9705-1:2000)
6.2
×
×
カテゴリ3の使用 (JIS B 9705-1:2000)
6.3
×
×
カテゴリ4の使用 (JIS B 9705-1:2000)
6.4
×
注. 1.×印の項目を適用する。
2.*タイプⅠの選択に関しては,8.6参照
両手操作制御装置のタイプ(表1参照)の選択及び設計は,次による。
− 存在する危険源
− リスクアセスメント
5
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 技術使用の経験
− それぞれの適用に対し特定しなければならない他の要因[例えば,偶発的操作及び機能不良の防止(箇
条8参照),その他の条件(JIS B 9700-1:2004,4参照)]。
注記 リスクアセスメントに関するガイダンスはJIS B 9700-1に規定され,詳細なガイダンスはJIS B
9702に規定されている。
5
安全機能の特性
5.1から5.7に規定している安全機能の特性は,表1に従って両手操作制御装置に含まなければならない。
5.1
両手の使用(同時操作)
両手操作制御装置は,オペレータが両手操作制御装置を操作するため,同時期の間はそれぞれの制御操
作器にそれぞれの手を置き,両手を使用しなければならないように,設計しなければならない。これが同
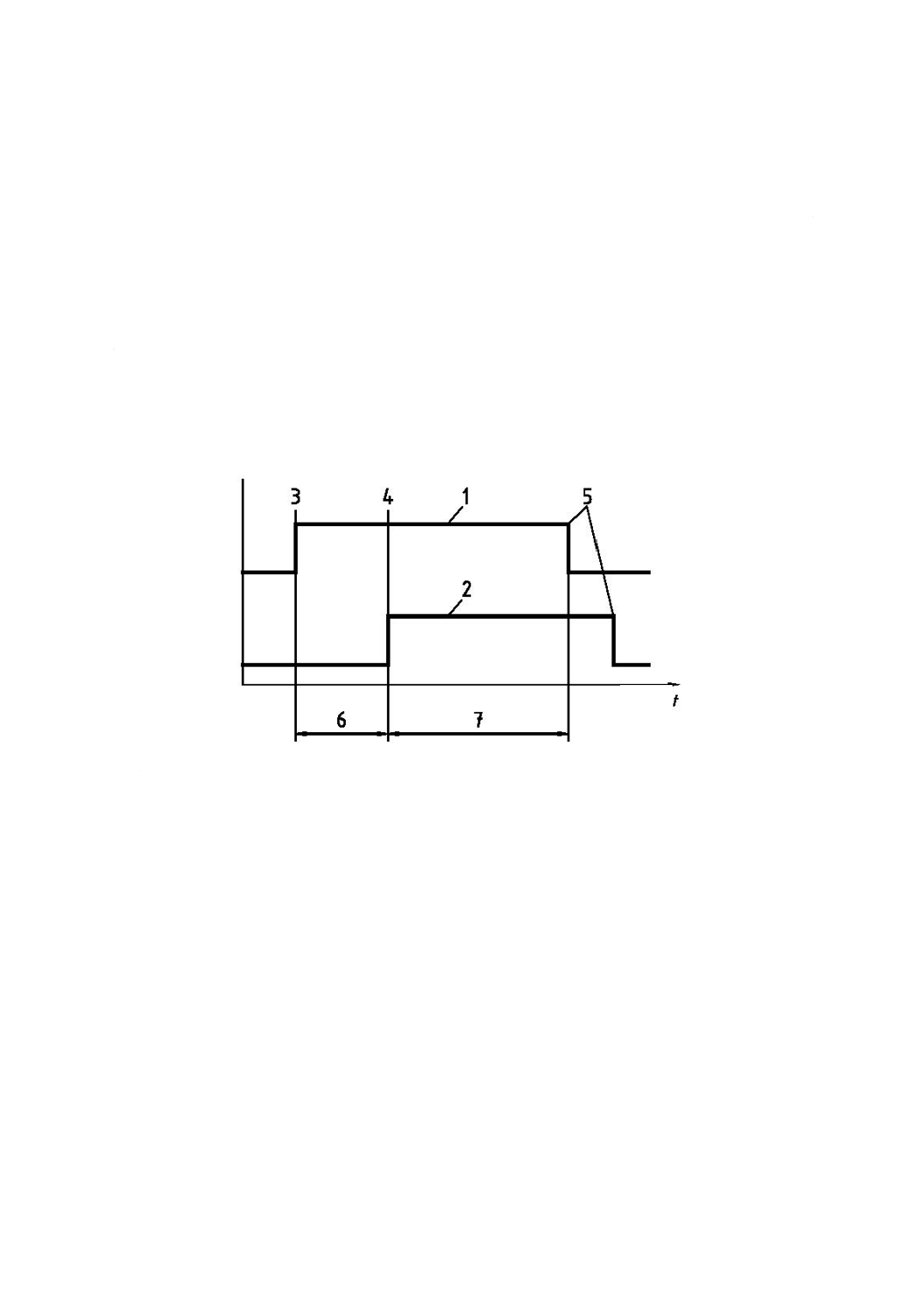
時操作であり,二つの入力信号のそれぞれの開始間のタイムラグとは独立のものである(図2参照)。
1 第一の手
5 入力信号の停止
2 第二の手
6 タイムラグ規定しない・同時操作
3 第一の入力信号の開始
7 同時操作の期間
4 第二の入力信号の開始
図2−同時操作の入力信号
5.2
入力信号と出力信号間の関係
二つの制御操作器のそれぞれによる入力信号は,二つの入力信号が入力されている限り,両手操作制御
装置からの出力信号を開始し,維持しなければならない。出力信号の形式(例えば,チャンネルの数,パ
ルス,波形による。)はそれぞれの場合の設計要求事項に従って,変わってもよい。その形式は,機械制御
装置による単一の出力信号として,常時見なされ,識別されなければならない。
5.3
出力信号の停止
一方の又は両方の制御操作器の解放は出力信号の停止を開始しなければならない。
5.4
偶発的操作の防止
時間
6
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
偶発的に制御操作器を操作する可能性は最小にしなければならない(箇条8及び箇条9参照)。
5.5
機能不良の防止
両手操作制御装置の保護効果は容易に機能不良に陥ってはならない(箇条8及び箇条9参照)。
5.6
出力信号の再開始
出力信号の再開始は両方の制御操作器を解放した後にだけ,可能でなければならない。
5.7
同期操作
5.7.1
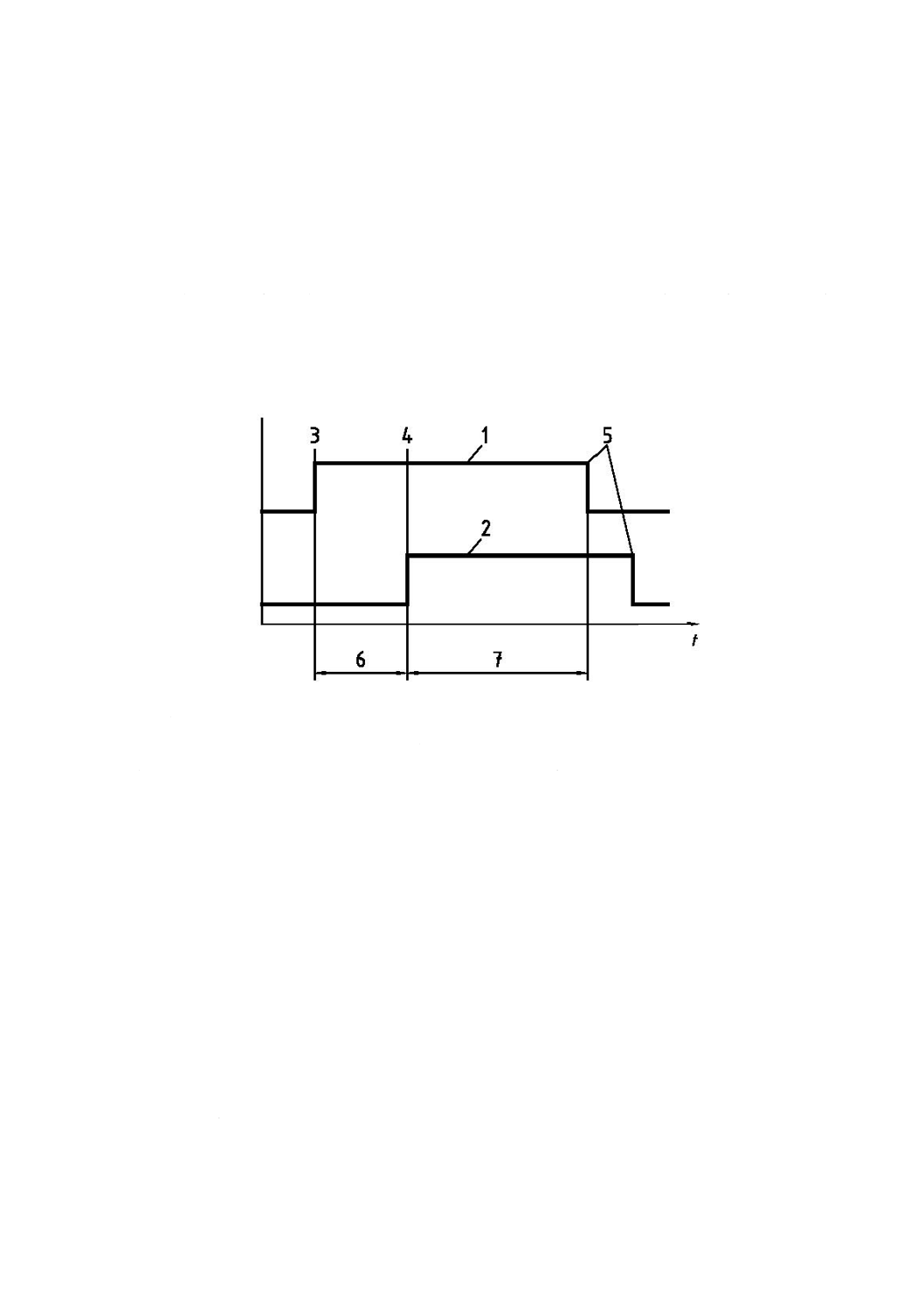
出力信号は,両方の制御操作器が0.5秒以下のタイムラグで操作される場合だけ生成されなければ
ならない(図3参照)。
記号の説明
1 第一の手
5 入力信号の停止
2 第二の手
6 タイムラグ≦0.5秒・同時操作
3 第一の入力信号の開始
7 同時操作の期間
4 第二の入力信号の開始
図3−同期操作の入力信号
5.7.2
両手操作制御装置は,制御操作器双方が道程に対する特定の空間的要求事項を満足する場合にだけ
出力信号を生成しなければならない。
5.7.3
制御操作器が同期に操作されない場合,出力信号の生成は防止されなければならない。また,両方
の制御操作器を解放すること,及び両方の入力信号を再入力することが必要でなければならない。
注記 一台の機械を操作するために二つ以上の両手操作制御装置が使用される場合,同期操作はそれ
ぞれの両手操作制御装置内にだけ要求され,両手操作制御装置間では要求されない。
6
制御のカテゴリに関連する要求事項
6.1
カテゴリの選択
時間
7
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
故障の場合における両手操作制御装置の部品の挙動は,JIS B 9705-1:2000(表2参照)の選択カテゴリ
に従わなければならない。
両手操作制御装置の制御に関するカテゴリは,機械制御システムの安全関連部の制御に関するカテゴリ
より低くてはならない(JIS B 9705-1:2000参照)。
附属書Bは両手操作制御装置のタイプとJIS B 9705-1:2000によるカテゴリの間の関係について記載して
いる。
6.2
カテゴリ1の使用
少なくともJIS B 9705-1:2000のカテゴリ1に従った,十分吟味された安全構成品及び安全原則が,タイ
プⅠ及びタイプⅢAの両手操作制御装置に使用されなければならない。
注記 高い信頼性及び高い利用性を達成するために,十分吟味された安全構成品及び安全原則が両手
操作制御装置のすべてのタイプに関して使用されることを推奨する。
6.3
カテゴリ3の使用
6.3.1
リスクアセスメントが単一不具合のもとでの安全性の要求事項を示した場合,タイプⅡ及びタイプ
ⅢBの両手操作制御装置はカテゴリ3(JIS B 9705-1:2000),及び6.3.2,6.3.3,並びに6.3.4に適合しなけ
ればならない。
6.3.2
両手操作制御装置の単一不具合は,安全機能の喪失につながってはならない。
6.3.3
両手操作制御装置は,単一不具合の結果として片手操作制御装置に変わってはならない。
6.3.4
出力信号は,単一不具合の結果として生成されてはならない。
注記 これらの要求事項は,すべての不具合が検出されるということを意味していない。結果として,
未検出の不具合の蓄積が安全機能の喪失及び両手操作制御装置の意図しない出力につながる場
合がある。
6.4
カテゴリ4の使用
6.4.1
リスクアセスメントが自動監視の要求事項を示した場合,タイプⅢCの両手操作制御装置はカテゴ
リ4(JIS B 9705-1:2000)及び,6.3,6.4.2,6.4.3,並びに6.4.4に適合しなければならない。
6.4.2
単一不具合は安全機能の次の動作時又は動作前に検出されなければならない。
6.4.3
単一不具合の発生後,出力信号の再開始が可能であってはならない。
6.4.4
単一不具合発生時に生成される出力信号は継続する場合があるが,片方の又は両方の入力信号が停
止した時,出力信号は消滅しなければならない。もし単一不具合が検出できない場合,不具合の組合せが
安全機能の喪失につながってはならない。
7
プログラマブル電子システムの使用
プログラマブル電子システム(PES)が両手操作制御装置の機能的特性を達成するために使用される場
合,PESのハードウェア及びソフトウェアの安全要求事項は,リスクアセスメントに従ってその妥当性を
確認しなければならない。
設計された機能的特性がむやみに変更できないということを確実にするために,PESのハードウェア及
びソフトウェアに,確固とした手段が提供されなければならない。
タイプⅢB及びタイプⅢCの両手操作制御装置の出力信号は,機械制御システムに対して単一チャンネ
ルのPESだけで生成及び送信されてはならない。
注記 この分野におけるガイダンスを提供する文書リストは,参考文献で示してある。
8
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8
偶発的操作及び機能不良の防止
8.1
共通の考慮
両手操作制御装置の制御操作器は,特定の用途に関するリスクアセスメントに従って,両手操作制御装
置の保護効果が容易に機能不良にならないように,及び偶発的操作の可能性が最小限になるように,設計
及び配置しなければならない。
片手だけの使用,片手及び/又は人体部位の可能な組合せ,及び/又は機能不良を許す単純な補助品の
使用を考慮し,危険状態にある間,危険区域に到達することを不可能にしなければならない。偶発的操作
(例えば,オペレータの衣服による。)は同様の方法で考慮されなければならない。
単純な補助品は,例えば,ブリッジ,コード及びテープである。非対称の操作方向,カバー,形状等の
選択は,機能不良の可能性を最小にしなければならない。二人で操作する両手操作制御装置で,各々の手
が一本ずつ空く可能性がある場合は,同期操作を使用することにより解決できる。
注記 “機能不良”からの総合的な保護は不可能である。
8.2から8.6は,機能不良が可能になるような個々のやり方を,防止のための予防策とともに示す。考慮
しなければならない機能不良となるやり方は,両手操作制御装置の設計,操作条件,両手操作制御装置の
附属品並びに位置決めの方法及び特定の安全距離の要求事項等によっている。
8.7は偶発的操作を防止するいくつかの方法を示す。
リストアップされている予防策はこの規格に適合するために,単一で又は組み合わせて要求される場合
がある。最も一般的な設計タイプに適用しなければならない試験手順は,10.5による。両手操作制御装置
の他の設計については,これら試験手順が適用できる場合又は適用できない場合がある。これらの場合,
その両手操作制御装置の危険源分析及び起こりうる使用及び/又は誤使用に関するリスクアセスメントを
実行しなければならない。また,適切な方策がこの規格に適合するために採用されなければならない。
8.2
片手の使用による機能不良の防止
片手の使用による機能不良を防止するための方策が備えられなければならない。適切な方策の例は次に
よる。
− 制御操作器は,少なくとも260mm(機器の内寸法)分離する。
− 制御操作器がシールド周囲で少なくとも260mmの距離で分離されるような方法で設計された制御操作器間に,一
つ以上のシールド又は突起面を備える。
8.3
同一の腕の手と肘の使用による機能不良の防止
同一の腕の手と肘を使用することによる機能不良を防止する方策が備えられなければならない。
適切な方策例は次による。
− 内寸法で少なくとも550mmの制御操作器の分離。人間工学的理由により,この距離は600mmを超え
ないほうがよい。
− 同時に,同じ腕の肘と指先でふれることができないような方法で設計された制御操作器間で,一つ以
上のシールド又は突起面を備える。
− 制御操作器を肘で操作することが出来ないような方法で設計されたカバーを備える。
− 操作が異なる種類の,及び/又は操作方向の異なる制御操作器
8.4
両前腕又は両肘の使用による機能不良の防止
前腕及び/又は肘を使用することにより結果として,危険源から手までの距離が要求される安全距離よ
り短い場合,前腕及び/又は肘を使用することによる機能不良を防止する方策が備えられなければならな
9
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
い。
適切な方策は,制御操作器が前腕及び/又は肘で操作されることができないように設計されたカバー及
び/又はカラーを使用することである。
8.5
片手と人体の他の部位(例えば,膝,腰)の使用による機能不良の防止
片手と他の人体部位を一緒に使用することによる機能不良を防止する方策が備えられなければならない。
適切な方策の例は次による。
− 床又は接近用レベルの上方で少なくとも1100mmの位置にある水平面又は水平に近い面に制御操作器
を配置。これは腰による操作を防止することを意図している。
− 垂直又は垂直に近い面に取り付ける場合,制御操作器の周囲の保護カラーを備える。
− 制御操作器が片手と他の人体部位で操作することができないような方法で設計されたカバー及び/又
はシールドを備える。
8.6
片方の制御操作器を操作状態にすることによる機能不良の防止
片方の制御操作器を操作状態のままにすることによる機能不良を防止する方策が備えられなければなら
ない。
この機能不良のやり方により,両手操作制御装置が片手制御を引き起こす。また,その操作状態にされ
た操作器によって入力信号が恒久的に生成される場合がある。結果として,両手操作制御装置の出力信号
が片手使用だけで生成する,ということを許容する場合がある。この機能不良のやり方を防止するための
適切な方策は次による。
− 片手による次の操作のための出力信号の再開始を防止するために,両手操作制御装置の設計段階で再
開始の特性を取り入れることが必要でなければならない(5.6参照)。
− 片手による最初の起動を防止するために,両手操作制御装置の設計段階で同期操作の特性を取り入れ
ることが必要でなければならない(5.7参照)。
注記 タイプⅠの両手操作制御装置の選択が考慮される場合はいつでも,同期操作及び再開始の特性
を無視できるかどうかを決定するために,注意深くリスクアセスメントを実行することが重要
である。
8.7
偶発的操作
両手操作制御装置の偶発的操作の可能性を最小化しなければならない。
8.2から8.6で示される方策は,偶発的操作を最小化するのに役立つ。偶発的操作を防止する他の適切な
方策は次による。
− 機械的制御操作器に対し,必要とされる力及び移動量の観点より,あらかじめ決めた操作の必要性
− 非機械的制御操作器(例えば,光電装置,静電容量装置)に対し,あらかじめ決めた操作だけを許容
する検知レベルの必要性
9
一般要求事項
9.1 人間工学要求事項
人間工学的によい原則(EN894-3参考)と,機能不良又は偶発的操作を防止するための両手操作制御装
置の設計方法との間には,時どき,互いに相いれない場合がある(例えば,開口部の寸法とある操作で手
袋の着用が必要であること。)。
安全性を達成するための手段及び方策は,次の間のバランスを反映する必要がある。
− 人間工学的によい原則に従う必要性,及び
10
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 機能不良及び偶発的操作を防止するための方策を備える必要性
このバランスは特定のリスクに対して適切な安全性を提供しなければならない。
9.2
操作条件及び環境影響
両手操作制御装置の部品は,予測される操作ストレスに耐え,関連する規格の要求事項(例えば,開閉
容量,開閉頻度)並びに予測される環境影響(例えば,振動,衝撃,温度,異物,湿度,オイル,電磁界)
を取り扱う関連規格を満足するような方法で選択し,据付けし,組み合わせなければならない。
9.3
エンクロージャ
9.3.1
エンクロージャ及びその取付けは,予想される操作ストレス及び周囲ストレスに耐えるように設計
しなければならない。
9.3.2
角部,端部等は,傷害を回避するように丸くするか,面取りをしなければならない。
9.3.3
着脱又は開閉を意図したカバー及び部品は,工具を使用することによってだけ着脱可能とするか又
は開閉可能となるように構成しなければならない。
9.3.4
エンクロージャがスタンドの上に取り付けられる場合,スタンドはエンクロージャ及び床にしっか
りと取り付けるための器具を備えなければならない。取付具は拘束形でなければならない。
9.3.5
アクチュエータ解放後危険状態がある場合,オペレータが危険区域に到達できないように,エンク
ロージャは位置決めされ,取り付けられなければならない(9.8及び12.2参照)。
9.3.6
制御操作器を支持しているエンクロージャが調整可能な場合,所定の位置でロックするための手段
を備えなければならない(可動式両手操作制御装置に関して9.7参照)。
9.4
制御操作器の選択,設計及び据付
9.4.1
制御操作器は,過度の疲労(例えば,無理な姿勢,不適切な動き,高い操作力)がかかることなく
操作可能なように選択,設計,配置及び据付けしなければならない(EN894-3参考)。
9.4.2
制御操作器は赤であってはならない。
注記 電気式両手操作制御装置に関しては,JIS B 9960-1:1999参照。
9.4.3
制御操作器は,他の部分を押しつぶす又はせん断する部分を形成してはならない。
9.4.4
両手操作制御装置,関連する機械の制御システム,及びそれらの相互接続はJIS B 9705-1:2000に
従ったカテゴリに一致しなければならない。
9.5
加速度による意図しない出力信号の防止
両手操作制御装置に伝えられる加速力度によって引き起こされる予見可能な力が出力信号を引き起こし
てはならない(例えば,転倒,偶発的衝撃,又はショック荷重等)。
9.6
可動式及び携行式手持ち機械の意図しない操作
9.6.1
両手操作制御装置は,それが制御する可動式及び/又は携行式手持ち機械の通常の取扱いによる意
図しない操作を防止するように設計しなければならない。
9.6.2
機械の危険な運動を起動するための入力信号を与えるために,制御操作器の分離及び異なる動作が
要求されるように,両手操作制御装置は設計されなければならない。
注記1 分離したハンドルでの二つの操作制御器の準備は,これらの操作方法が異なったものでなけれ
ば,この要求事項を満足しない。
注記2 制御操作器の一つに対する自動ロックアウト器具の準備は,より高い保護を提供する。
9.7
可動式両手操作制御装置
9.7.1
可動式両手操作制御装置のアクチュエータ及びそれを支持するエンクロージャは,通常の使用で安
定していなければならない(JIS B 9700-2参照)。
11
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 これは質量が大きい場合又は他の適切な手段を含むことにより達成できる場合がある。
9.7.2
可動式両手操作制御装置は,操作する際,動きを防止するような手段を備えなければならない。
注記 これは質量が大きい場合,ロックできるホイールによって又は他の適切な手段を含むことによ
り達成できる場合がある。
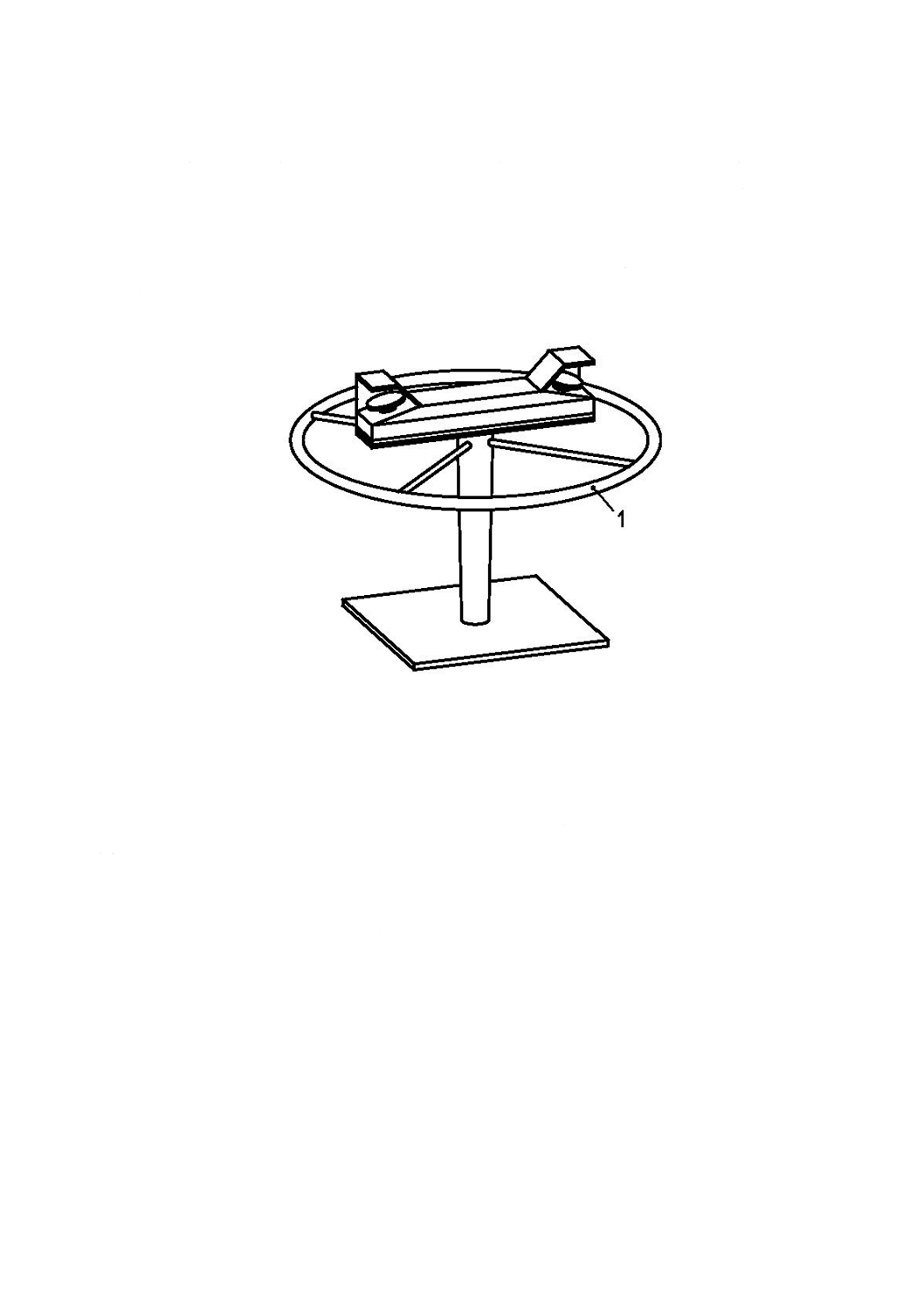
9.7.3
制御操作器と危険区域間に要求される安全距離を維持し,及びチェックするための器具が利用可能
でなければならない(9.8及び12.2参照)(例えば,距離を維持するためのディスタンスリングによる。図
4参照)。
記号の説明
1 ディスタンスリング
図4−ディスタンスリング付き可動式両手操作制御装置の例
9.7.4
パイプ,ケーブル及び接続部は,9.2及び9.4.4を考慮して損傷に対する保護をしなければならない。
9.8
安全距離
制御操作器と危険区域間に要求される安全距離(JIS B 9715:2006の最小距離参照)を計算するために,
次を考慮しなければならない。
− 手/腕の速度(JIS B 9715:2006参照)
− 両手操作制御装置の形状及び配置
− 両手操作制御装置の応答時間
− 両手操作制御装置の出力信号の停止に従って,機械を停止させる,又は危険源を除去するために係る
最大時間
− 機械の意図する使用(JIS B 9700-1:2004参照)
− 関連するタイプC規格
10 検証
12
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.1 検証のための一般要求事項
リスクアセスメントにより同定される両手操作制御装置の明白になった要求事項は,設計の理論的査定
及び実際の試験によって検証しなければならない。検証手順の要約を表2に示す。これらの手順は機能特
性を含め,両手操作制御装置の安全要求事項を検証することを意図している。
表2−検証手順
箇条
安全要求事項
手 順
備 考
目視検査
性能
チェック
計測
一 般
9.2
操作条件及び
環境影響
×
×
関連規格適用
9.3
エンクロージャに関
する要求事項
×
×
型式試験による
9.4
制御操作器の選択,
設計及び据付
×
×
×
9.5
加速度による意図し
ない出力信号
×
×
9.6
意図しない制御操作
×
×
可動式及び携行式手持ち機械のため
9.7
安定性
×
可動式両手操作制御装置のため
9.8
応答時間
×
11
マーキング
×
機能特性
5.1
両手の使用(同時操作)
×
×
5.2
入出力信号の関係
×
5.3
出力信号の停止
×
5.4
偶発的操作
×
×
×
箇条8の方法の使用
5.5
機能不良
×
×
×
10.5を適用することによる
5.6
出力信号の再開始
×
リセットチェック
5.7
同期操作
×
×
6.2
カテゴリ1
×
確認することによる
6.3
カテゴリ3
×
×
不具合シミュレーションに関しては1
0.3参照
6.4
カテゴリ4
×
×
不具合シミュレーションに関しては1
0.3参照
注. ×印の項目を適用する。
検証手順は,両手操作制御装置自体に限定して規定しているものであって,両手操作制御装置が接続さ
れている機械類の制御システムで起こりうる影響については考慮に入れていない。結果的に両手操作制御
13
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
装置の設計で要求があるような機械の制御システムからのフィードバック信号は,シミュレーションしな
ければならない。
考慮しなければならない検証手順は,両手操作制御装置の設計,両手操作制御装置のタイプ,操作条件,
両手操作制御装置の附属品並びに位置決めの方法,及び特定の安全距離の要求事項等に依存する。これら
の検証手順は視認検査,性能チェック,計測及び理論的査定を含む。この規格は試験手順,特に“機能不
良”についてのガイダンスを与える。ただし,詳細な試験の方法論については規定しない。
設計者及び/又は製造業者は,両手操作制御装置が設計仕様に適合しているということを実証するため
に検証及び/又は型式試験を行う装置を準備しなければならない。
これらの仕様に関する要求事項は,規格(例えば,JIS B 9960-1:1999)で,又は規格が存在しない場合
は設計者によって示されてもよい。
10.2 目視検査
目視検査は,両手操作制御装置の特定タイプに要求される特性を物理的試験によって検証することであ
り,表2に示す項目に適用しなければならない。
十分吟味されたものとして使用される構成品は,製造業者によって明確に特定されなければならない。
10.3 性能チェック
性能チェックは,両手操作制御装置の操作の特定タイプに要求される特性を検証することである。不具
合シミュレーションは,両手操作制御装置設計の不具合分析に基づいている。それにはタイプⅡ,タイプ
ⅢB及びタイプⅢCのための,すべての安全関連不具合のシミュレーションを含む(表1及び表2参照)。
10.4 計測
計測は,この規格の要求事項に適合するため,設計者によって特定された形状,バイナリ信号,機械的
特性及び時間を検証することである。
10.5 機能不良の防止
機能不良を防止するための計測試験は,附属書A(規定)に示す。
最も一般的な設計タイプに対して,計測試験のいくつか又はすべてが適用されなければならない(箇条
8参照)。
いくつかの計測試験は相互に他の計測試験の中に含まれたり,またある計測試験は互いに補完する関係
にあるので,両手操作制御装置の意図する使用及び形状によって附属書Aのどの計測試験が必要とされる
かを示す。
これら試験の組合せは片手だけ,また片手と肘,膝,腰,太股又は腹部を使用することによる機能不良
を防止することを意図している。
11 マーキング
11.1 JIS B 9700-2:2004,6.4の要求事項に従わなければならない。
11.2 この規格に適合する両手操作制御装置は,機械の統合部分ではない場合,次の詳細を明白に及び耐
久性をもってラベルを貼付しなければならない。
− 製造業者及び/又は責任のある供給者の名前及び住所
− 製造モデル又は型番
− 製造番号及び製造年月日
− この規格の箇条4及び表1に従った両手操作制御装置のタイプ及びこの規格番号及びその年号
14
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例
− 3.9に定義される両手操作制御装置の応答時間
− 電気式両手操作制御装置の場合,適切な定格情報(JIS B 9960-1:1999参照)。
− 空圧,機械的及び他の非電気的両手操作制御装置の場合,操作圧力及び/又は他の関連情報。
11.3 両手操作制御装置が二つ以上の分離したユニットで構成されている場合,少なくとも一つのユニッ
トは11.2で要求されるようにマーキングしなければならない。これらのユニットは同じ両手操作制御装置
の部分として特定することができるような方法でそれぞれマーキングされなければならない。
11.4 この規格に適合する両手操作制御装置は,機械の統合部分である場合,機械上に少なくとも両手操
作制御装置のタイプ及びこの規格の番号をマーキングしなければならない。両手操作制御装置のための他
の指示事項及び技術データは機械の取扱説明書で示さなければならない。
注記 このマーキングはメインの機械マーキング板又は制御操作器に近接して貼付してもよい。
11.5 両手操作制御装置の構成品は,必要な場合,保全及び/又は修理目的のために,特定可能でなけれ
ばならない。
12 据付,使用及び保全上の情報
12.1 情報に関する規定
JIS B 9700-2:2004,6.5の要求事項に従わなければならない。
情報は,製造業者又はその代理人により機械を使用する国の言語で,両手操作制御装置の据付,使用及
び保全に関して,提供しなければならない(JIS B 9700-2:2004,6参照)。
情報は図面,ダイヤグラム,表及び/又は文字情報の形式で提供されてもよい。
12.2 据付のための指示事項
両手操作制御装置が機械の統合部分でない場合,次の情報が提供されなければならない。
− 物理的寸法
− 必要なスペース,例えば,据付,検査,保全等のため。
− 取付け
− 要求される安全距離の決定方法に関する説明(9.8参照)
− 応答時間の値
− 要求される特性。両手操作制御装置と機械制御システムの関連する安全関連部との間の正確な相互作
用及び相互接続のためのJIS B 9705-1:2000によるカテゴリ選択のためのガイダンスを含む。
− 供給ライン及び相互接続ラインのサイズ及びタイプ(例えば,ケーブル,固定又はフレキシブルパイ
プ及びそれらの推奨配置)
− 保護装置(例えば,ヒューズ又は減圧バルブ)
− 最初の起動手順のための指示事項
− 調整及びセッティングの指示事項
− 両手操作制御装置及び機械制御システムの関連部分が正しく動作しているということを検証するため
の試験手順。
− 意図する使用の制限
− 予見可能な誤使用に対する準備
JIS B 9712:0000 タイプⅢC
15
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.3 使用のための指示事項
指示事項は,両手操作制御装置が正しく及び安全に使用できるように明瞭で,かつ曖昧でない言語で提
供しなければならない。
絵,ダイヤグラム,記号及び形状を適切な部分で使用しなければならない。
使用のための指示事項は,正しい機能性を検証し,機能不良を発見できるような情報を提供しなければ
ならない。
12.4 保全のための指示事項
保全のための指示事項は,次を含まなければならない。
− 保全及び修理に関する必要な情報(適切な場合,指示事項に図面及び回路図を含まなければならない。)。
− 保全及び/又は修理のためのスケジュールの一環としての適切な安全のための指示事項
− 系統的な保全のためのスケジュール
− 部品リスト
− 図形,図面及び記述による両手操作制御装置の部品の明瞭な指示
16
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
機能不良防止のための計測試験
この附属書は,機能不良防止のための計測装置について規定する。
A.1 一般
A.2からA.7の計測試験は,箇条8で要求する計測を検証するために,10.5で要求する試験である。図
A.1から図A.12は,機能不良防止のための規定で示す原則を図解したものであり,両手操作制御装置の設
計のために要求される詳細のすべてを表しているわけではない。
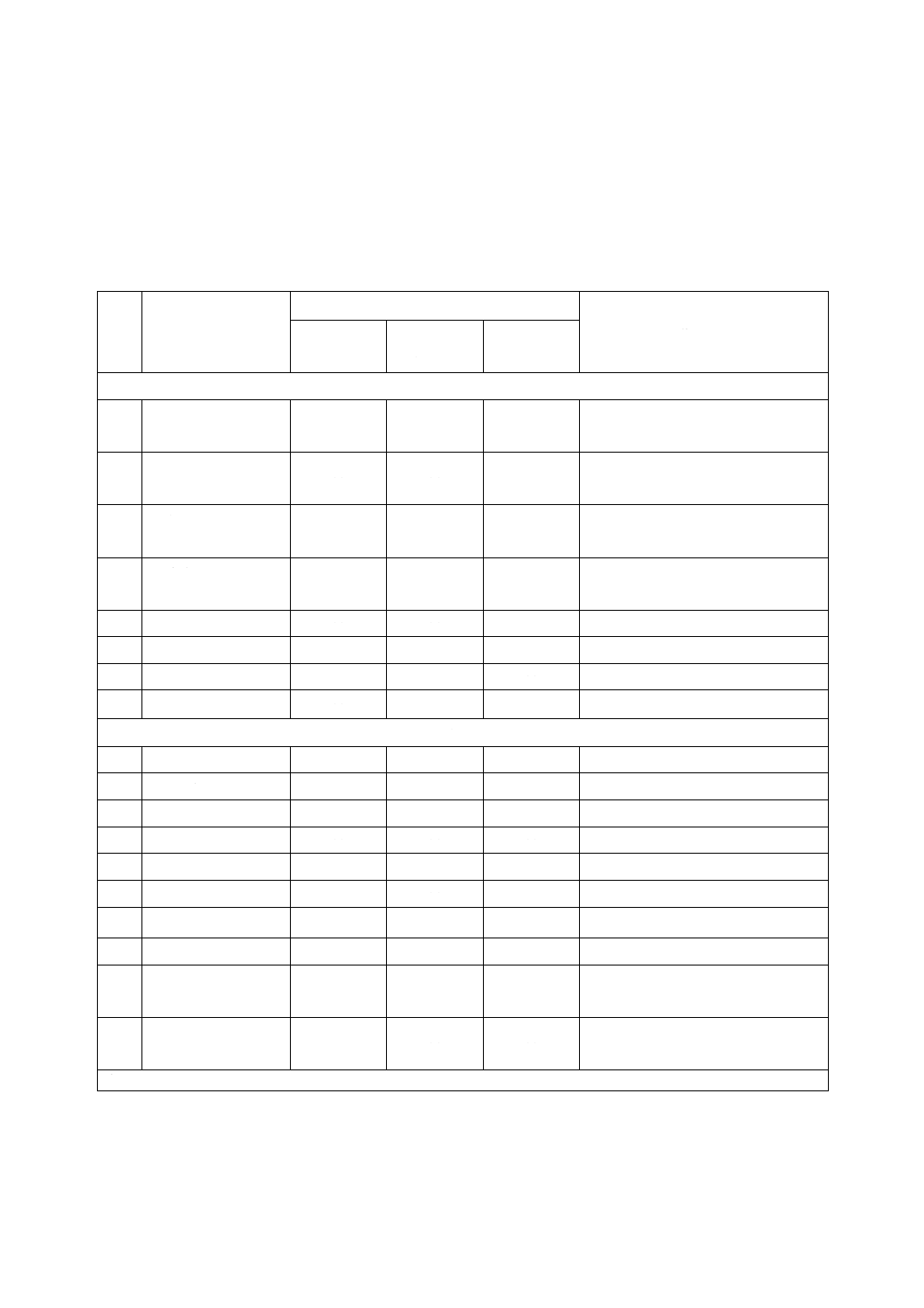
A.2 片手の使用による機能不良の防止(8.2参照)
A.2.1 260mm以上の距離による制御操作器の分離(図A.1参照)
図A.1―距離による分離
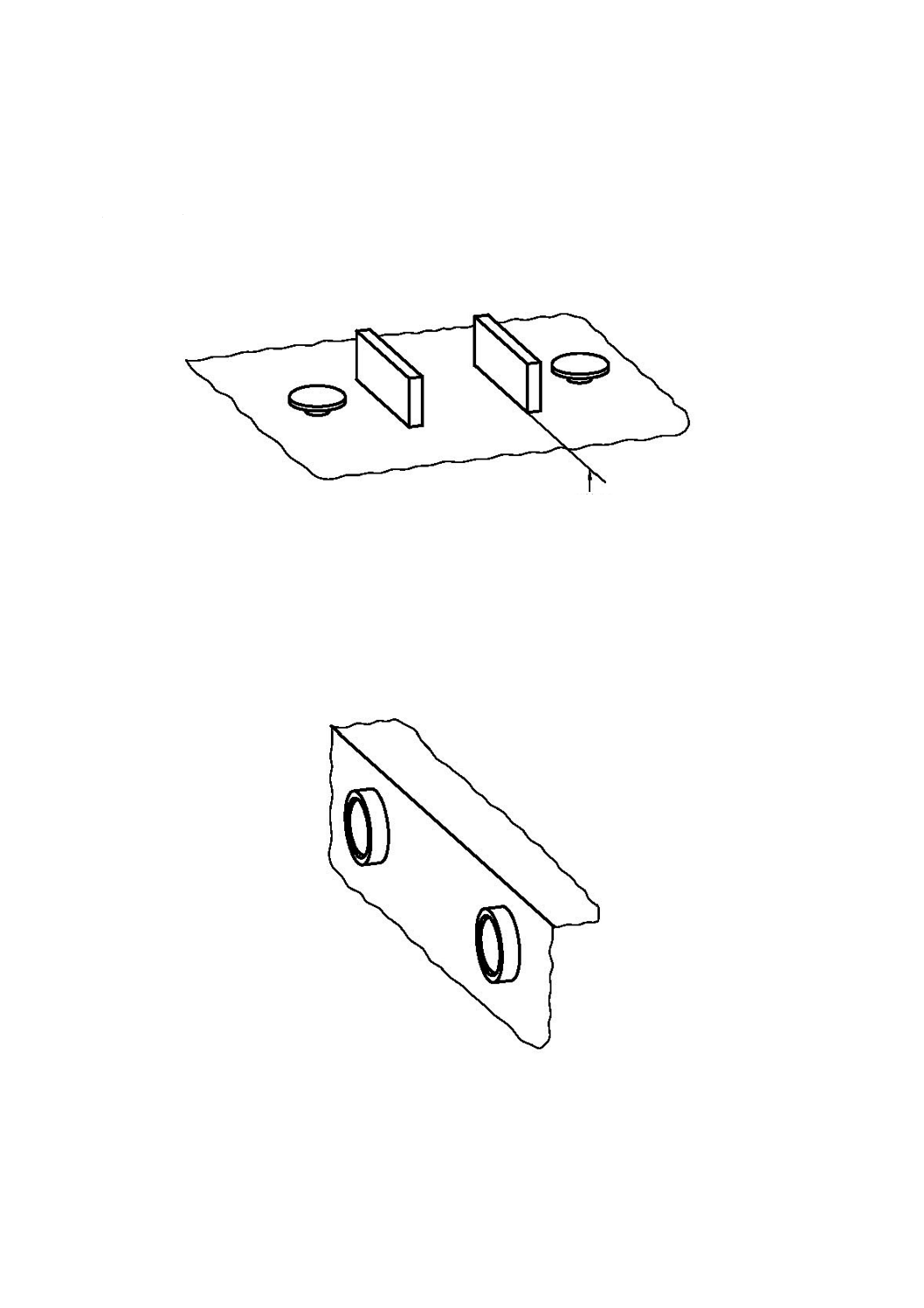
A.2.2 一つ以上のシールド又は突起面によって,指と指の間を表す260mmのコードの両端で制御操作器
に触れることがないような方法で設計された制御操作器の分離(図A.2参照)
図A.2―突起面による分離
記号の説明
1 コード
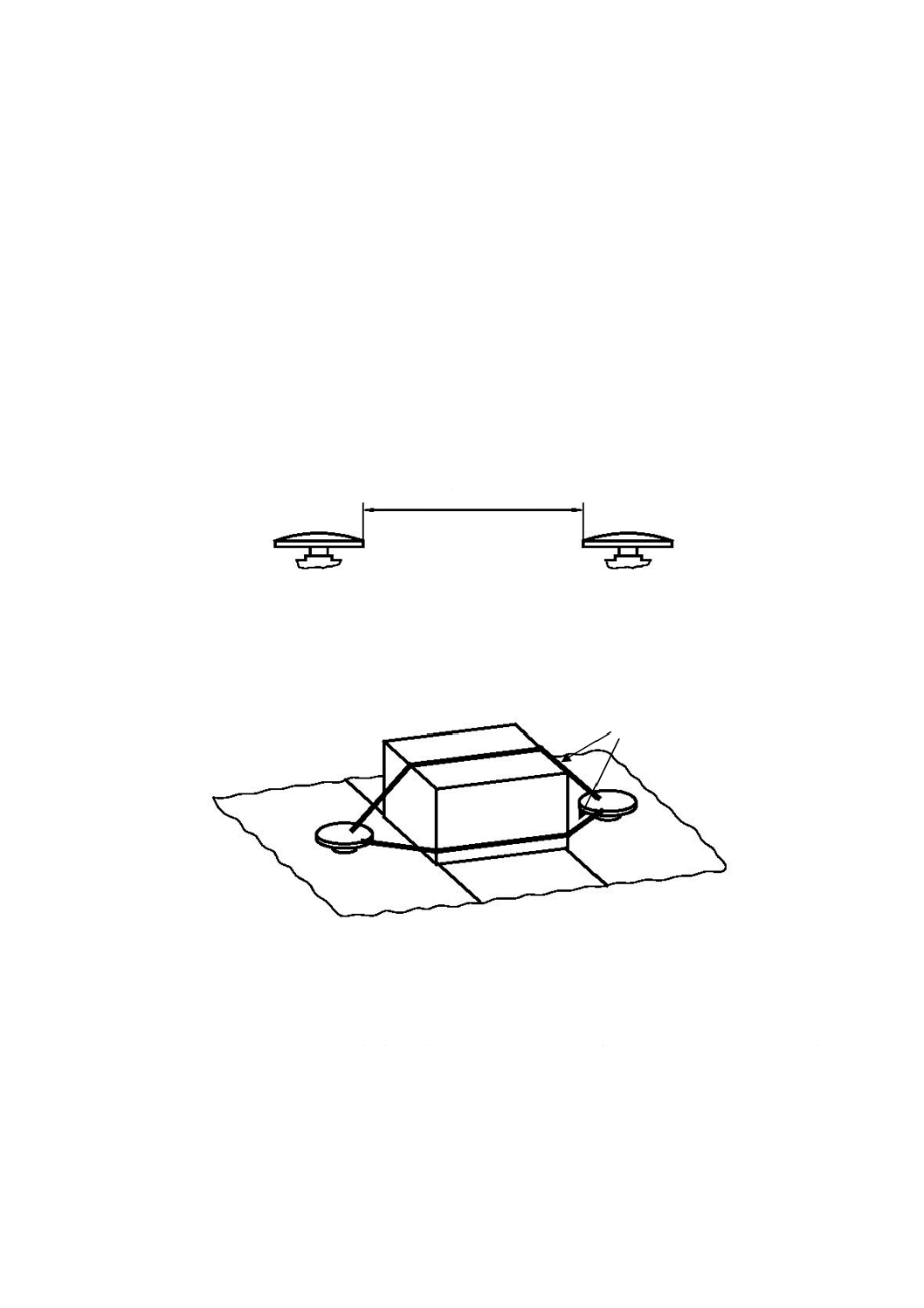
A.2.3 260mmのコードの両端で制御操作器に触れることがないような方法で設計されたカラー及び取付
方向による制御操作器の分離(図A.3参照)
≧260mm
1
17
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.3―カラー及び取付方向による分離
A.3 同一の腕の手と肘を使用する機能不良の防止(8.3参照)
A.3.1 550mm以上の距離による制御操作器の分離(図A.4参照)
図A.4―距離による分離
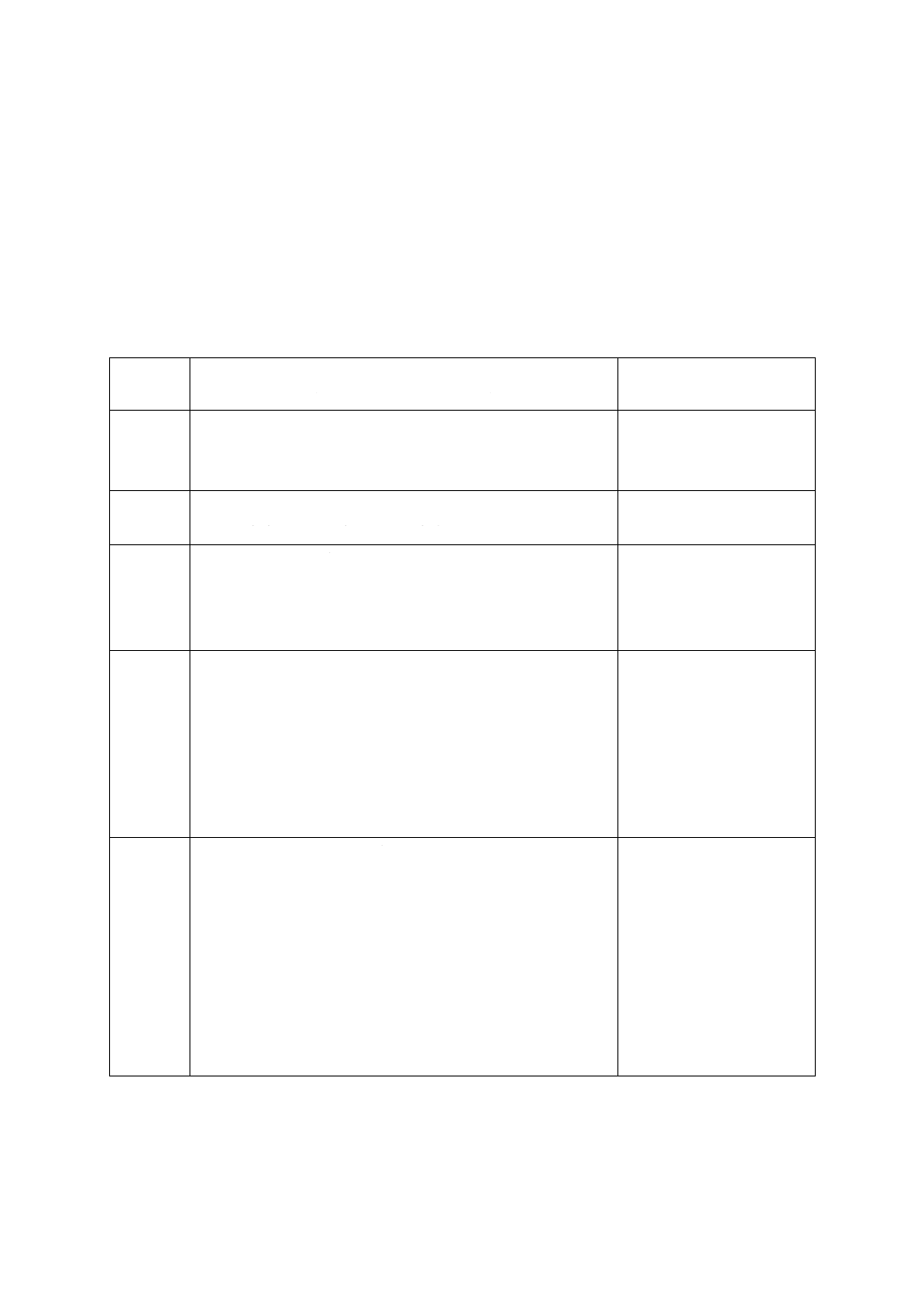
A.3.2 直径5mmを超えない長さ300mmの剛性のある棒とそれに取り付けた250mmのコードで構成され
る計測器の両端が,一つ以上のシールド又は突起面を介在させることによって制御操作器に同時に触れる
ことができないよう設計された、制御操作器の分離。棒は前腕を,コードは手を意味し,すべての可能な
操作位置で適用しなければならない(図A.5参照)。
記号の説明
1
コード
2 棒
図A.5―シールドによる分離
≧550mm
18
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
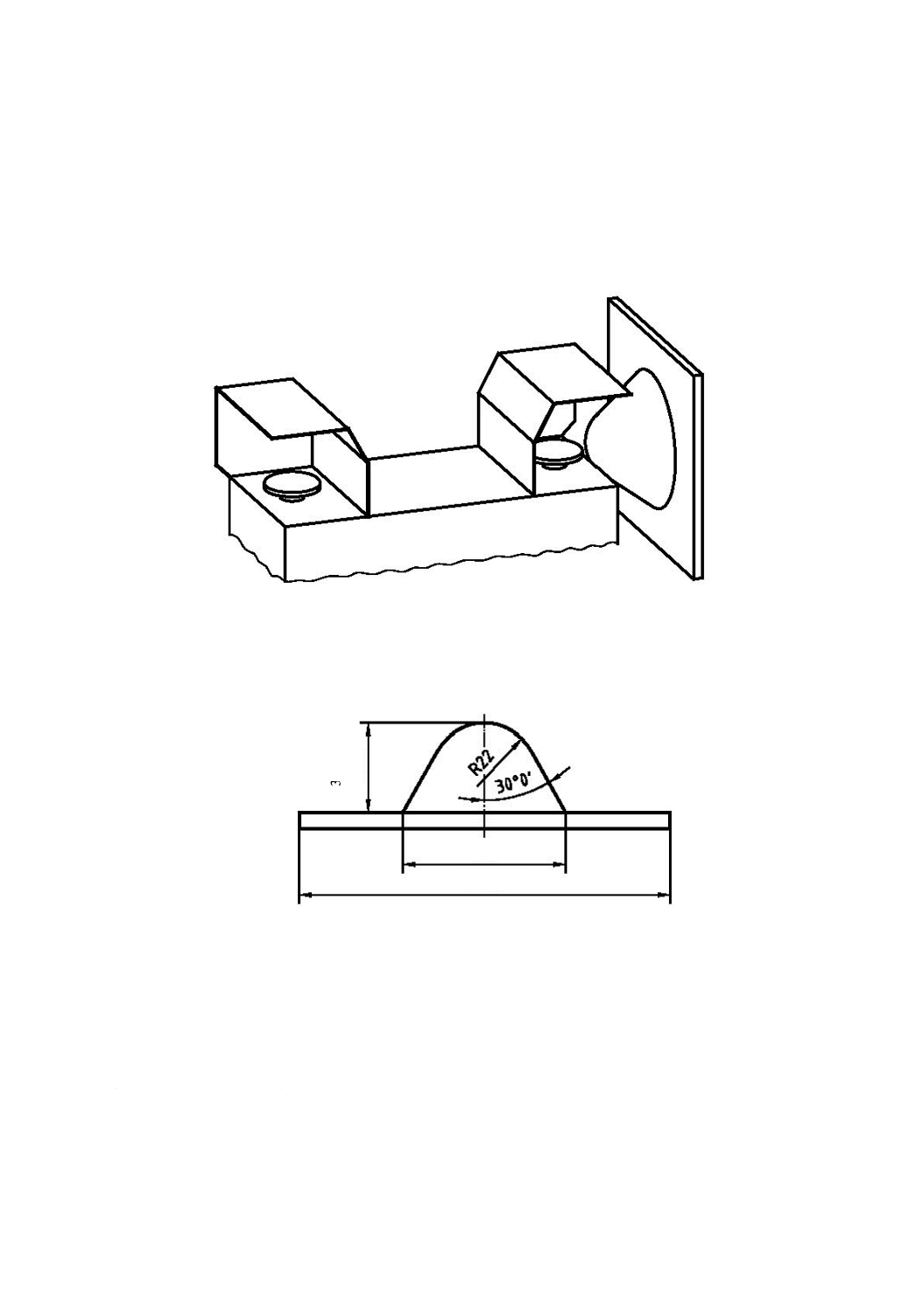
A.3.3 操作側から肘を表す試験用円すい(錐)(使用方法は,図A.6参照)の先端部分で制御操作器の操
作をできないように,操作側及び反対側からの接近を制限するよう設計されたシールドによる制御操作器
の分離。試験用円すい(錐)の寸法は図A.7に従わなければならない。
図A.6―試験用円すい(錐)の使用
図A.7―試験用円すい(錐)の寸法
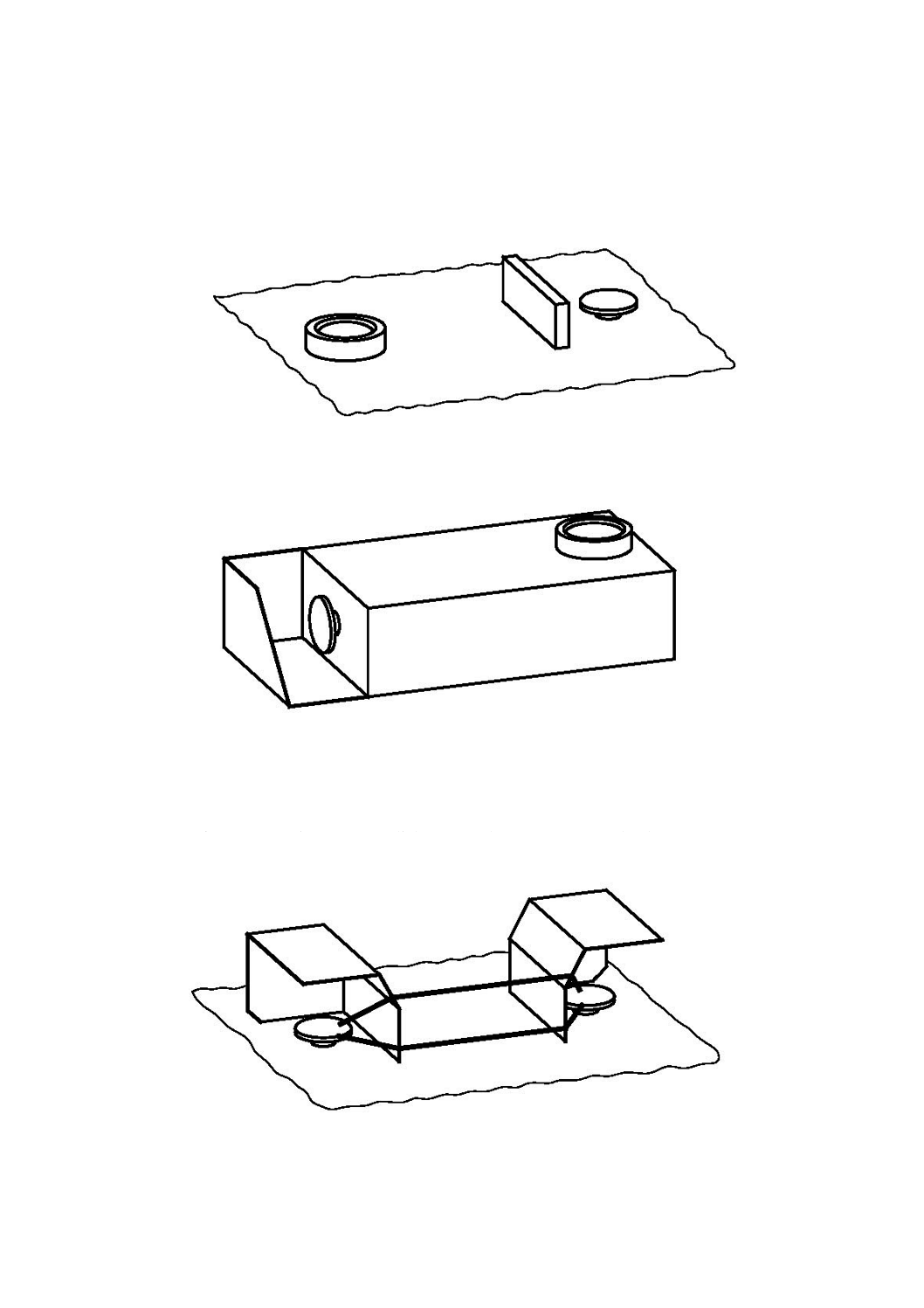
A.3.4 異なったタイプ及び/又は操作方向をもつ制御操作器(図A.8及び図A.9参照)
図A.8の構成に関しては,コード,棒(図A.5参照)及びカラーのための試験用円すい(錐)(図A.6
及び図A.7参照)も使用。
図A.9の構成に関しては,コード,棒(図A.5参照)及びカラー並びにシールドのための試験用円すい
(錐)(図A.6及び図A.7参照)も使用。
3
5
m
m
66mm
150mm
19
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.8―カラー及びシールドによる分離
図A.9―カラー,シールド及び操作方向による分離
A.4 前腕(複数)又は肘(複数)の使用による機能不良の防止(8.4参照)
制御操作器を前腕及び/又は肘により操作できないように設計されたシールド(図A.10参照)
図A.10の構成に関して,試験用円すい(錐)を使用(図A.6及び図A.7参照)
図A.10―シールドによる分離
20
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.5 手及び他の人体の部位の使用による機能不良の防止(8.5参照)
A.5.1 床又は接近用レベルの上方で少なくとも1100mmの位置にある水平面又は水平に近い面に制御操
作器を配置(図A.11参照)。
図A11―位置による機能不良の防止
A.5.2 制御操作器の周囲の保護カラー及び/又はシールドをもつ垂直又は垂直に近い面に制御操作器を
配置(例えば,図A.9及び図A.12参照)。
図A.12の構成に関して,コード,棒(図A.5参照)及びカラーのための試験用円すい(錐)(図A.6及
び図A.7参照)も使用。
図A.12―カラー及び位置による分離
A.5.3 カバー及び/又はシールド(図A.10参照)
≧1100mm
21
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
両手操作制御装置のタイプにおけるカテゴリ(JIS B 9705-1:2000による)の
使用
この附属書(参考)は,本体及び附属書(規定)に関連する事柄を補足するもので,規定の一部ではな
い。
カテゴリ
要求事項の要約
(JIS B 9705-1:2000,6参照)
両手操作制御装置
のタイプ
B
構成部分,制御システムの安全関連部及び/又は保護設
備は予想される影響に耐えるように,関連規格に従って設
計,製造,選択,組立,組み合わされること。
−
1
Bの要求事項が適用されること。
十分吟味された構成部分及び安全原則を用いること。
Ⅰ及びⅢA
2
Bの要求事項が適用されること。
十分吟味された構成部分及び安全原則を用いること。
安全機能は機械の制御システムにより適切な間隔でチェ
ックされること。
−
3
Bの要求事項及び十分吟味された安全原則の使用が適用
されること。
安全関連部は次のように設計されていること。
− いずれの部分の単一の不具合(障害)も安全機能の喪
失を招かない。
− 合理的に実施可能な場合は常に単一の不具合(障害)
が検出される。
Ⅱ及びⅢB
4
Bの要求事項及び十分吟味された安全原則の使用が適用
されること。
安全関連部は次のように設計されること。
− いずれの部分の単一の不具合(障害)も安全機能の喪
失を招かない。かつ
− 単一の不具合(障害)は,安全機能に対する次の動作
要求のとき,又はそれ以前に検出される。
それが不可能な場合,不具合(障害)の蓄積が安全機
能の喪失を招かないこと。
ⅢC
注a)
上表の“構成部分”は本規格の“構成品”を意味する。
b)
“十分吟味された”についてはJIS B 9705-1:2000,6.2.2.2, 6.2.2.3参照。
22
B 9712:2006 (ISO 13851:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS C 0508シリーズ 電気・電子・プログラマブル電子安全関連系の機能安全
[2] HSE Guideline, Programmable Electronic system in safety Related Application―Part1(ISBN 0118839136) and
Part2(ISBN 0118839063)
[3] Grundsatze fur Rechner in System mit Sicherheitsaufgaben(DIN V VDE 0801,Jan.1990)
[4] Personal Safety in Microprocessor Control Systems(ECR 184 and 185, Electronikcentralen, Denmark)
[5] EN894-3 Safety of machinery―Ergonomics requirements for the design of displays and control actuators―
Part3:Control actuators