B 9225-7:2016 (ISO 11783-7:2009)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 一般的な条件及び推奨事項 ································································································· 2
3.1 一般 ···························································································································· 2
3.2 信号特性 ······················································································································ 2
3.3 メッセージフォーマット ································································································· 2
3.4 作業機の機器構成オフセット ··························································································· 5
附属書A(規定)パラメータ定義 ···························································································· 6
附属書B(規定)パラメータグループ······················································································ 79
附属書C(参考)トラクタ制御メッセージ−例 ········································································ 103
附属書D(参考)トラクタ機能の作業機制御−制御の実装 ························································· 109
B 9225-7:2016 (ISO 11783-7:2009)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本農業機械工業会(JAMMA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格
JIS
B 9225-7:2016
(ISO 11783-7:2009)
農業機械−
シリアル制御及び通信データ・ネットワーク−
第7部:作業機メッセージアプリケーション層
Tractors and machinery for agriculture and forestry-
Serial control and communications data network-
Part 7: Implement messages application layer
序文
この規格は,2009年に第2版として発行されたISO 11783-7を基とし,トラクタと作業機との間におけ
る通信制御技術を製造業者間で共通化するため,技術的内容及び構成を変更することなく作成した日本工
業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,農業用トラクタと,直装,半直装,けん(牽)引,又は自走作業機とのシリアルデータネ
ットワークの制御及び通信について規定する。その目的は,トラクタ又は作業機に直装するセンサ,アク
チュエータ及び制御素子と,情報保存・表示装置との間でのデータ転送形式並びに方法を標準化すること
である。
この規格は,メッセージセットを規定して,トラクタと連結した作業機との間の通信方式で使用するメ
ッセージについて定義し,ネットワークの作業機メッセージアプリケーション層について規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 11783-7:2009,Tractors and machinery for agriculture and forestry−Serial control and
communications data network−Part 7: Implement messages application layer(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9225-3 農業機械−シリアル制御及び通信データ・ネットワーク−第3部:データリンク層
注記 対応国際規格:ISO 11783-3,Tractors and machinery for agriculture and forestry−Serial control and
communications data network−Part 3: Data link layer(IDT)
JIS B 9225-5 農業機械−シリアル制御及び通信データ・ネットワーク−第5部:ネットワーク管理
2
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 対応国際規格:ISO 11783-5,Tractors and machinery for agriculture and forestry−Serial control and
communications data network−Part 5: Network management(IDT)
ISO 639 (all parts),Codes for the representation of names of languages
ISO 11783-1,Tractors and machinery for agriculture and forestry−Serial control and communications data
network−Part 1: General standard for mobile data communication
ISO 11783-6,Tractors and machinery for agriculture and forestry−Serial control and communications data
network−Part 6: Virtual terminal
ISO 11783-9,Tractors and machinery for agriculture and forestry−Serial control and communications data
network−Part 9: Tractor ECU
IEC 61162-3,Maritime navigation and radiocommunication equipment and systems−Digital interfaces−Part
3: Serial data instrument network
3
一般的な条件及び推奨事項
3.1
一般
この規格で規定するメッセージセットは,作業機とトラクタとの間の連携動作を可能にする機械的な操
作装置と同様に,トラクタからの情報に対する作業機の基本的な要求を支援するために設計する。このメ
ッセージセットは,次の情報を含むメッセージをサポートする。
− 時間
− 対地速度
− (走行)距離
− ナビゲーション
− パワーテイクオフ[power take-off: PTO(以下,PTOという。)]パラメータ
− 3点ヒッチ
− 一般プロセスデータ
− 照明ファンクションパラメータ
メッセージは,定期的に一定の間隔で繰り返し送信する。
メッセージのパラメータは附属書Aによる。また,パラメータグループは附属書Bによる。
トラクタの制御メッセージの例を,附属書Cに示す。
3.2
信号特性
ISO 11783規格群によって構築されたネットワークは,流れているデータを電子制御ユニット(以下,
ECUという。)からネットワーク上の他のECUへ提供し,かつ,他のECUで使用することを目的として
設計する。
データの受信とデータの送信との間隔は,データの種類ごとに決められた送信間隔の2倍を超えないこ
とが望ましい。
3.3
メッセージフォーマット
3.3.1
一般
ISO 11783規格群によって構築されたネットワークは,パラメータグループのラベルとしてパラメータ
グループ番号(以下,PGNという。)を使用する。グループ内の各パラメータは,3.3.3で定義した範囲の
スケーリングされたデータ,又は1ビット以上のファンクション状態として表現する。これらは,一番左
3
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
のビットを最初として順に送信する。
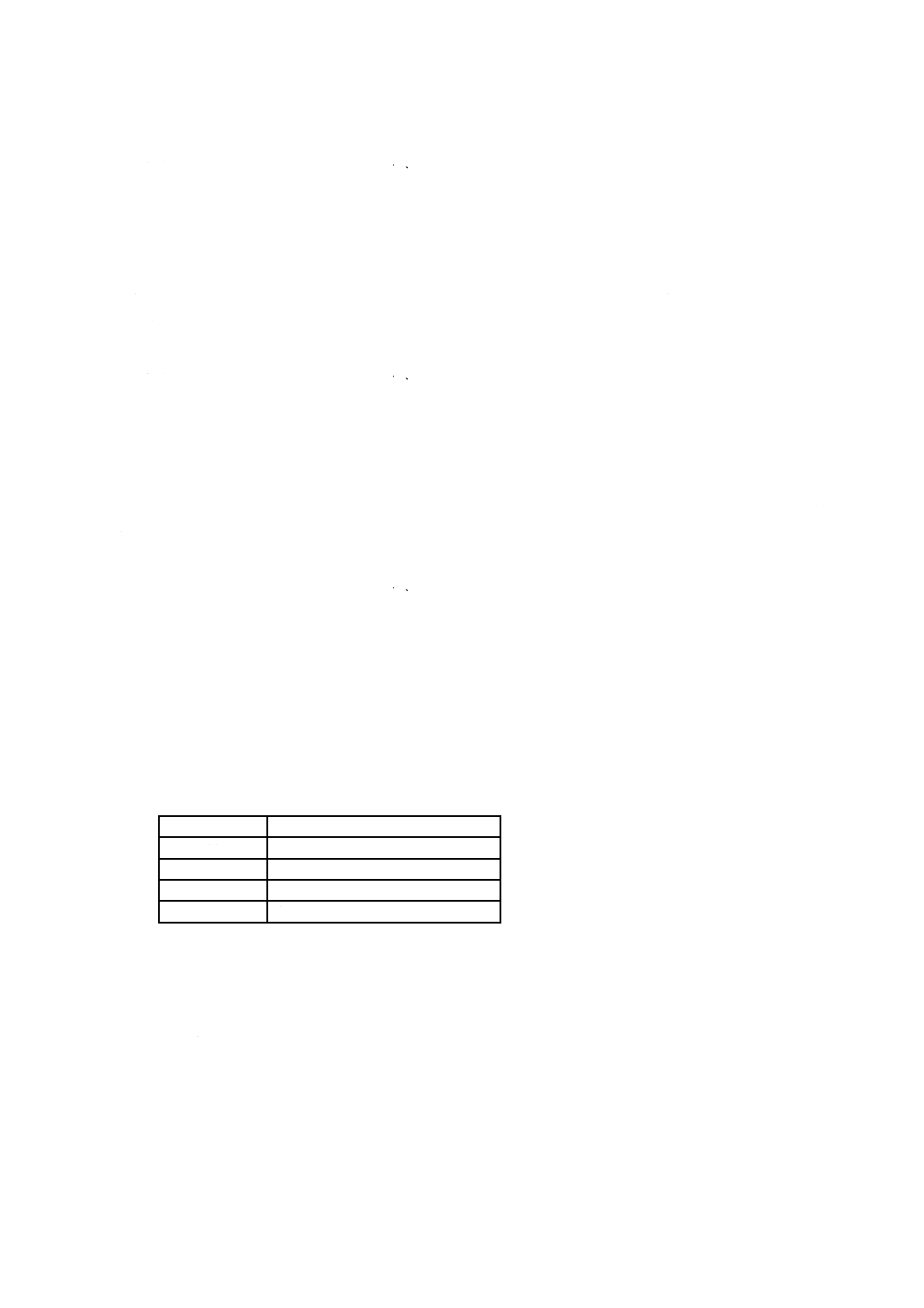
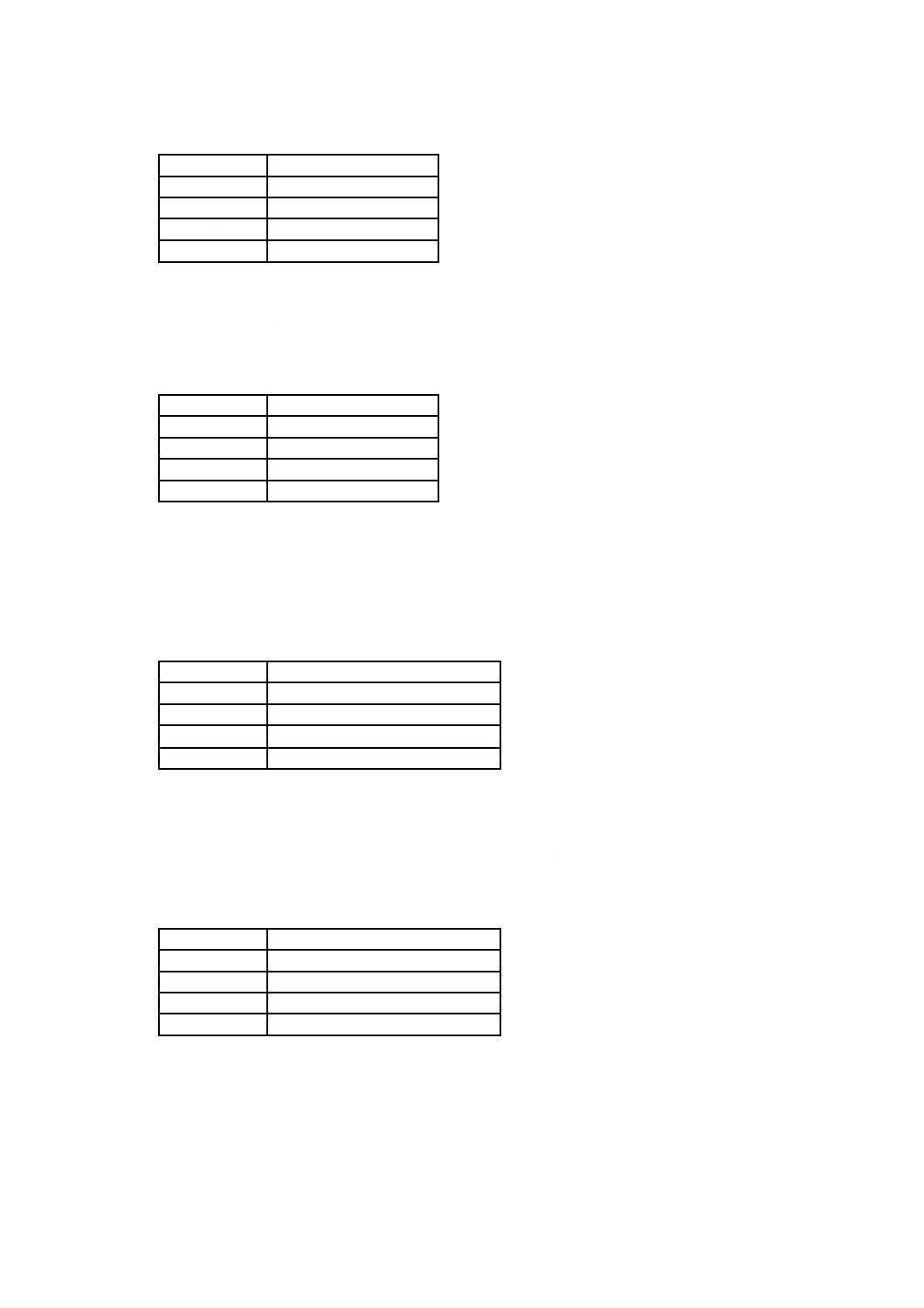
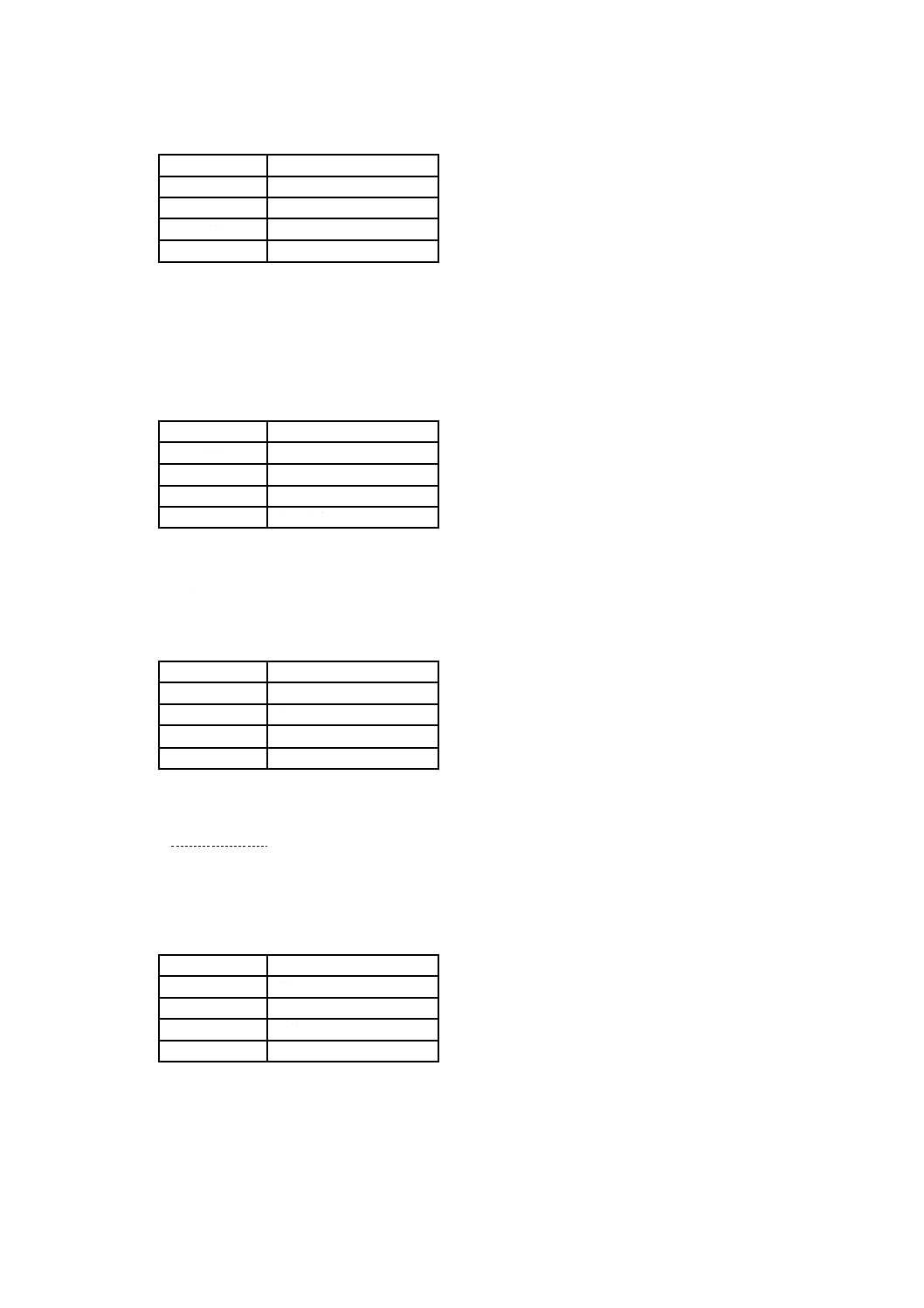
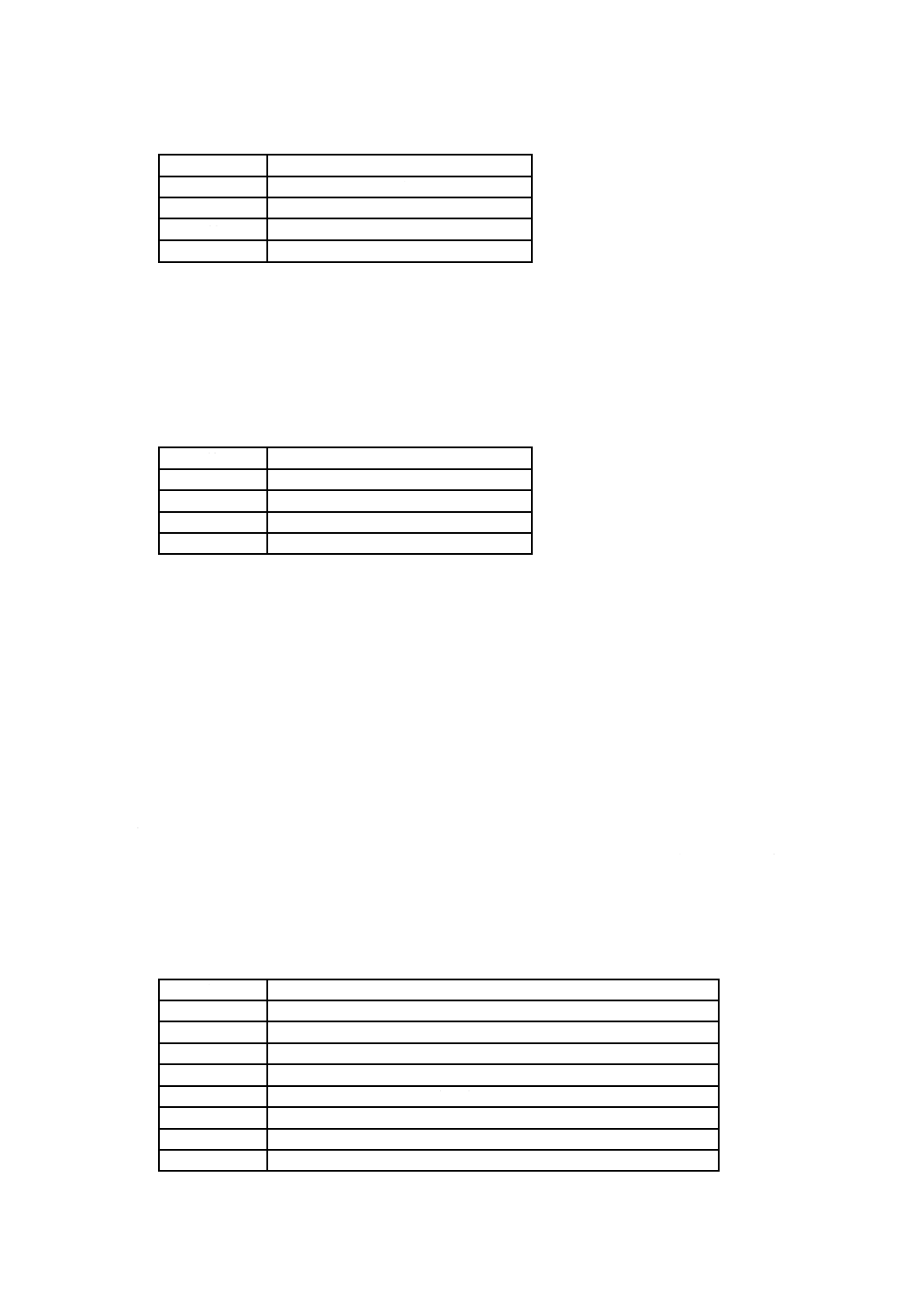
二つ以上のデータバイトで構成の数値パラメータは,最下位バイトを最初に送信しなければならない。
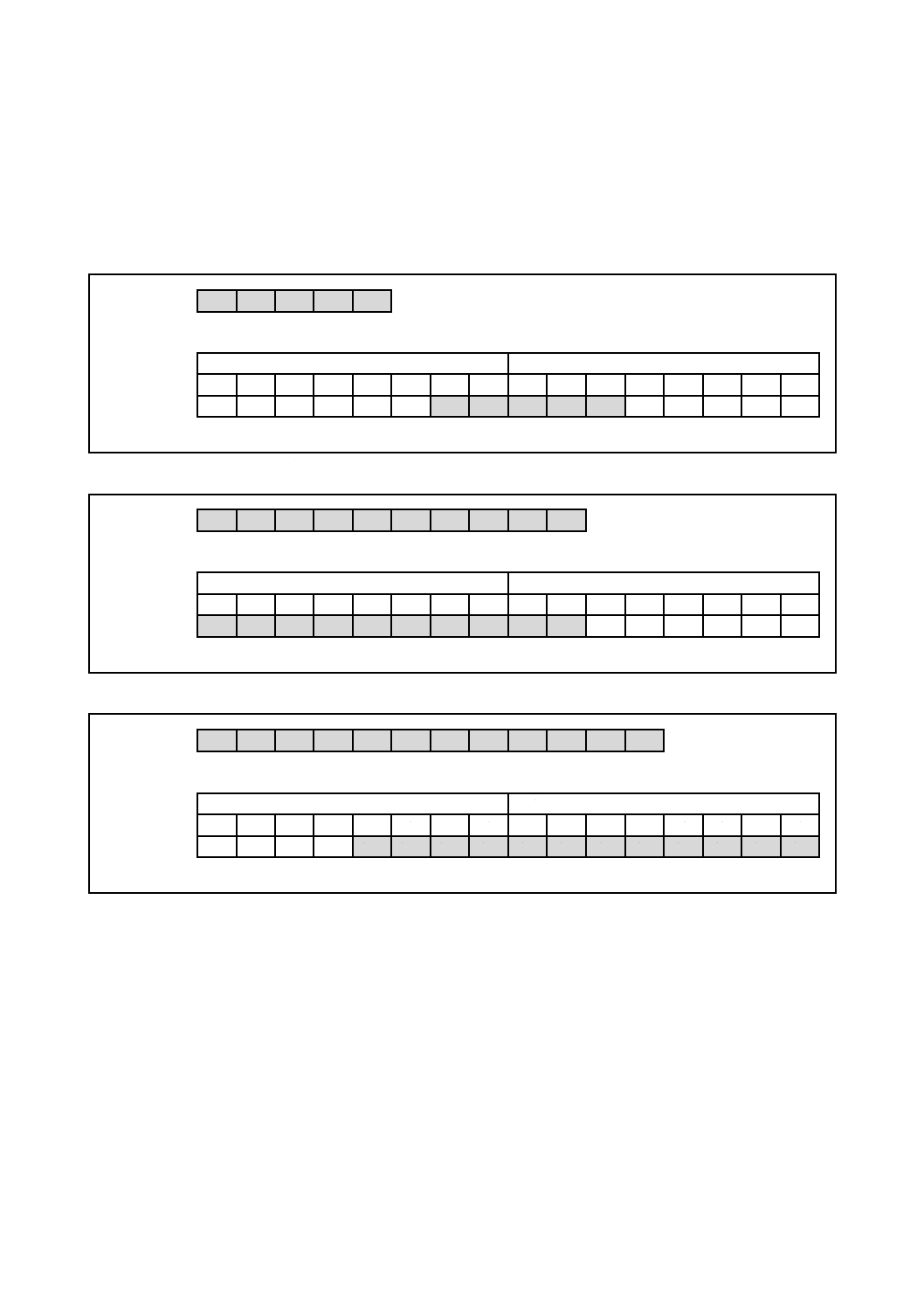
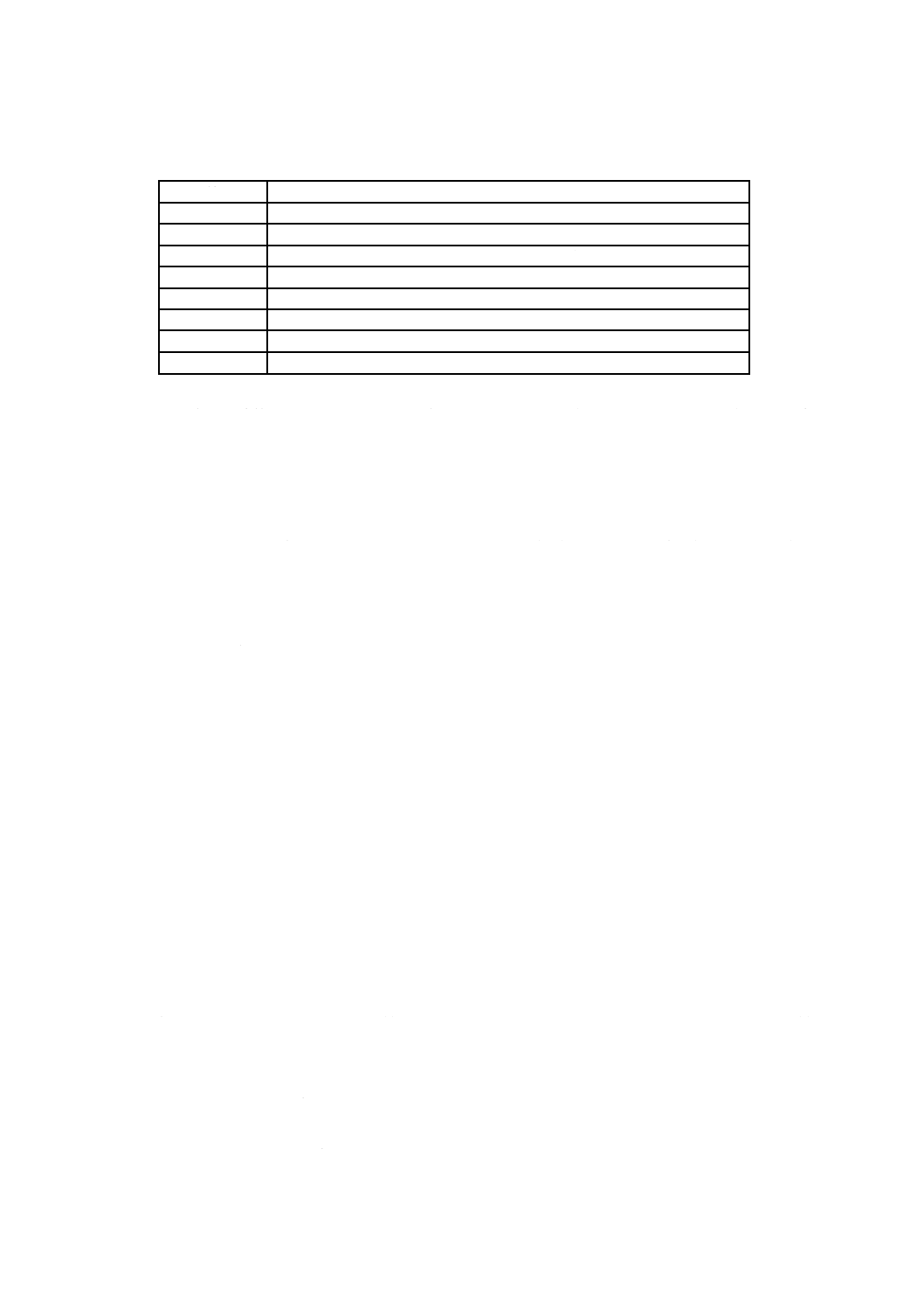
例えば,図1に示すようにパラメータがデータフィールドの複数のバイトにまたがるときは,パラメータ
最下位ビット(Lsb)は最下位バイト内に,残りの最上位ビット(Msb)を次の高位バイト内の第一ビット
側に置く。
データ
b5
b4
b3
b2
b1
Msb
Lsb
配置
Msb
バイト8
Lsb Msb
バイト7
Lsb
(ビッグエン
8
7
6
5
4
3
2
1
8
7
6
5
4
3
2
1
ディアン)
b5
b4
b3
b2
b1
Msb
Lsb
a) バイト境界を越え1バイト未満のデータパラメータ
データ
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
Msb
Lsb
配置
Msb
バイト2
Lsb Msb
バイト1
Lsb
(ビッグエン
8
7
6
5
4
3
2
1
8
7
6
5
4
3
2
1
ディアン)
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
Msb
Lsb
b) バイト境界で終わり1バイトより大きいデータパラメータ
データ
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
Msb
Lsb
配置
Msb
バイト8
Lsb Msb
バイト7
Lsb
(ビッグエン
8
7
6
5
4
3
2
1
8
7
6
5
4
3
2
1
ディアン)
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
Msb
Lsb
c) バイト境界で始まり1バイトより大きいデータパラメータ
図1−1バイト以上のデータ・パラメータ配置
3.3.2
データタイプ
パラメータには,コマンドデータタイプと測定データタイプとがある。
− コマンド
コマンドデータは,送信ECUが要求する設定値の数値,ファンクション,マルチステートパラメー
タの要求された状態を指定する。コマンドの要求は,必ずしも保証されない。例えば,コマンドは,
ソレノイドがそのファンクションを実現したか確認できなくても,ソレノイドの作動を要求してもよ
い。
トラクタは,与えられた任意コマンドを自動的に実行することはない。制御コマンドは,システム
4
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
への変更又は作動,及び動力の導入に影響を与え,様々なトラクタシステム内からの他のコマンドと
並行して発令することがある。各コマンドは,トラクタの他の制御,作動条件とともに判断されなけ
ればならず,トラクタ制御システムが適切であると判断したものだけを実行しなければならない。
例1 PTO接続,補助弁による押出し,ヘッドライトのハイビーム(走行用前照灯)点灯,リヤヒ
ッチ作動
− 測定値
測定データは,定義されたパラメータの状態を評価しつつ,送信ECUで測定又は監視されたパラメ
ータの現在値を伝達する。
例2 対地速度,ヒッチポジション,PTO接続,作業機ポジション
3.3.3
パラメータの範囲
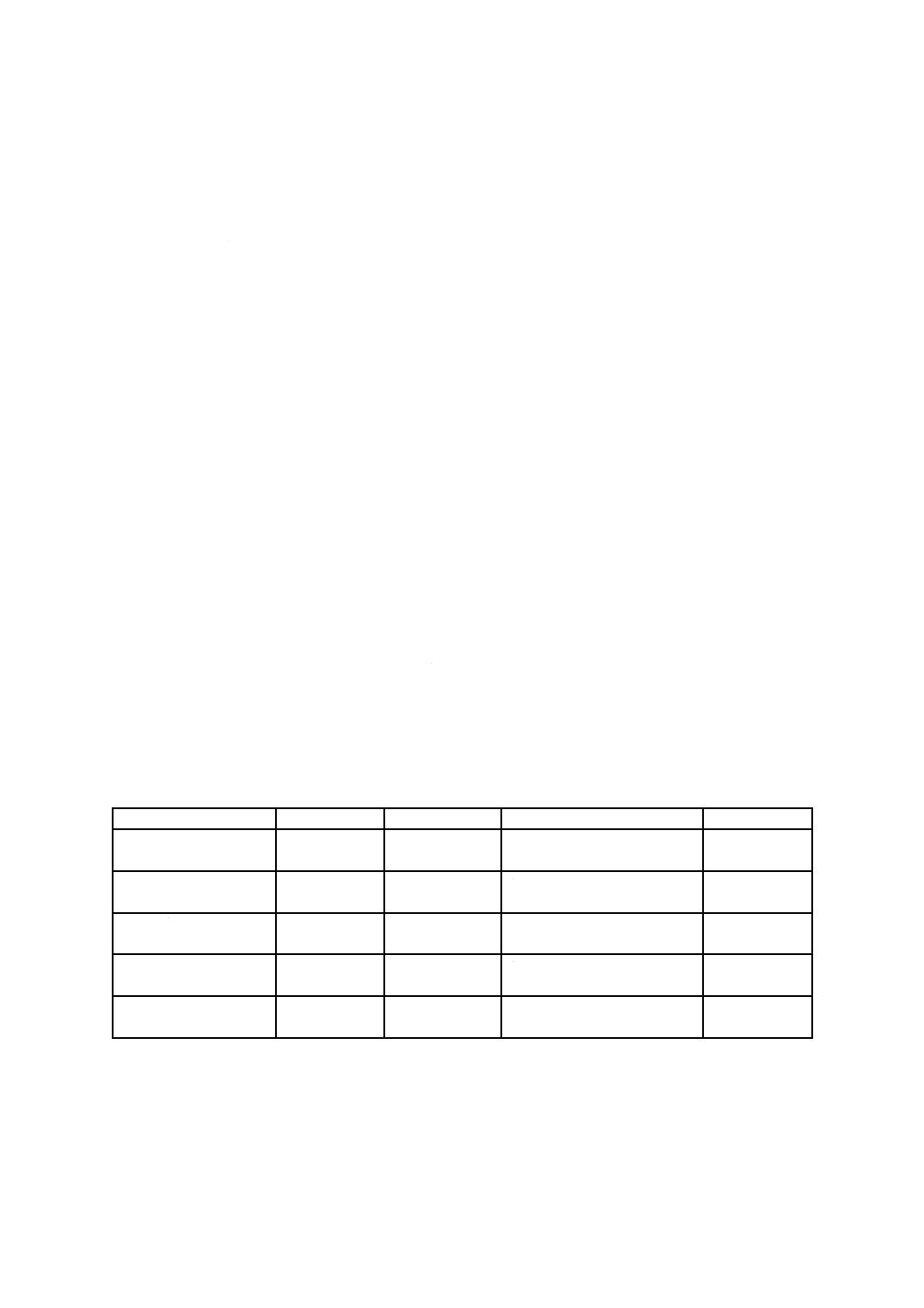
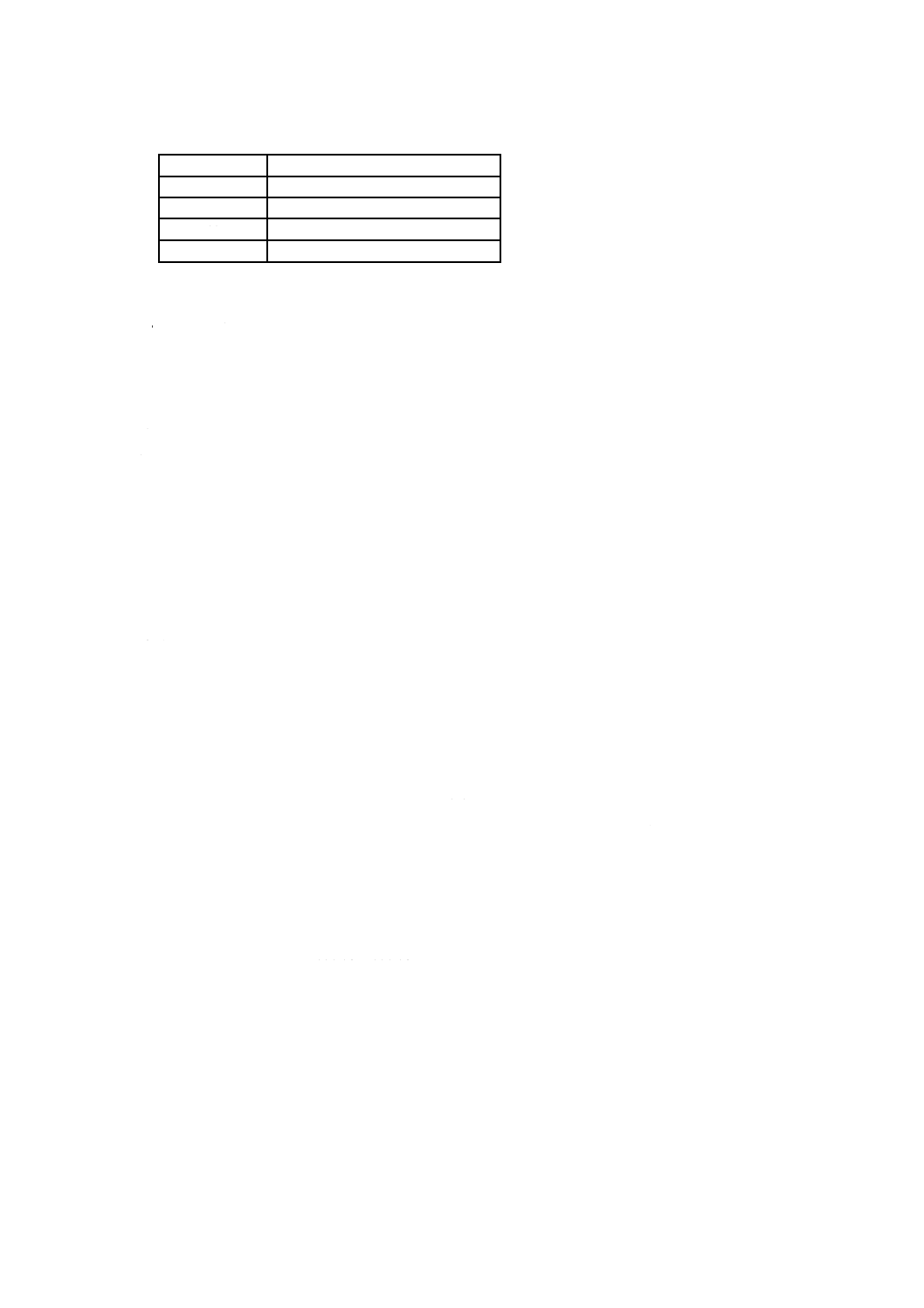
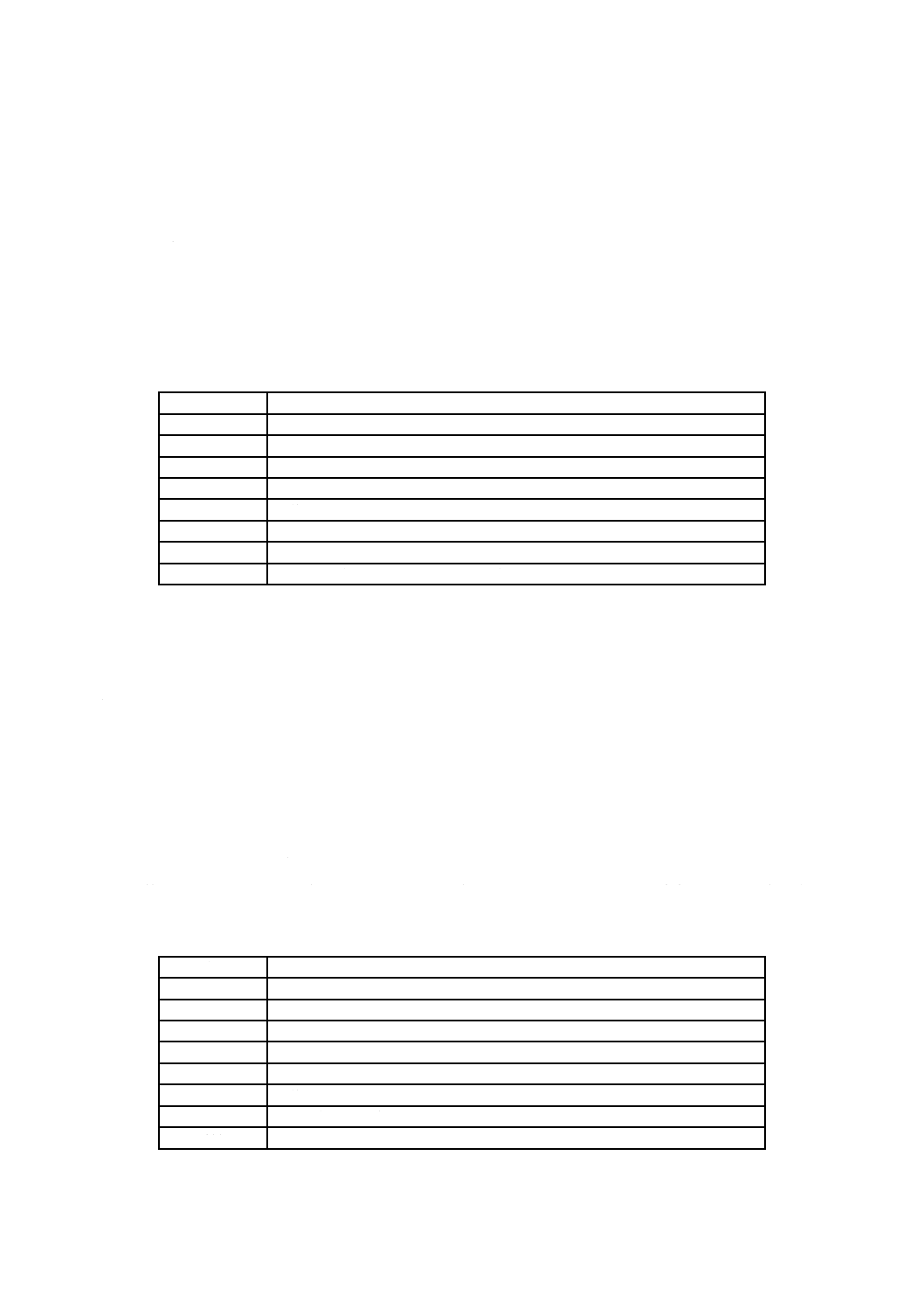
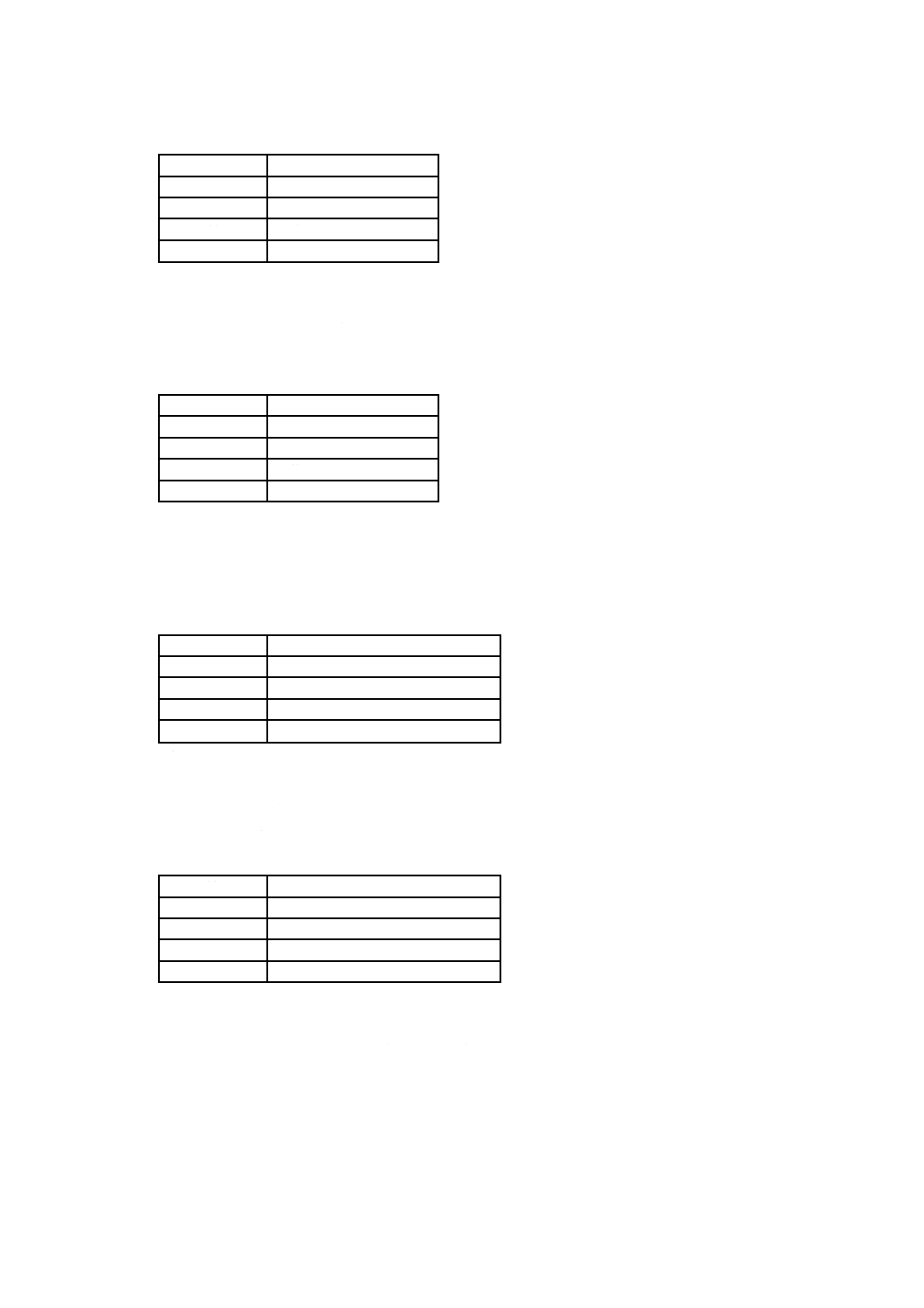
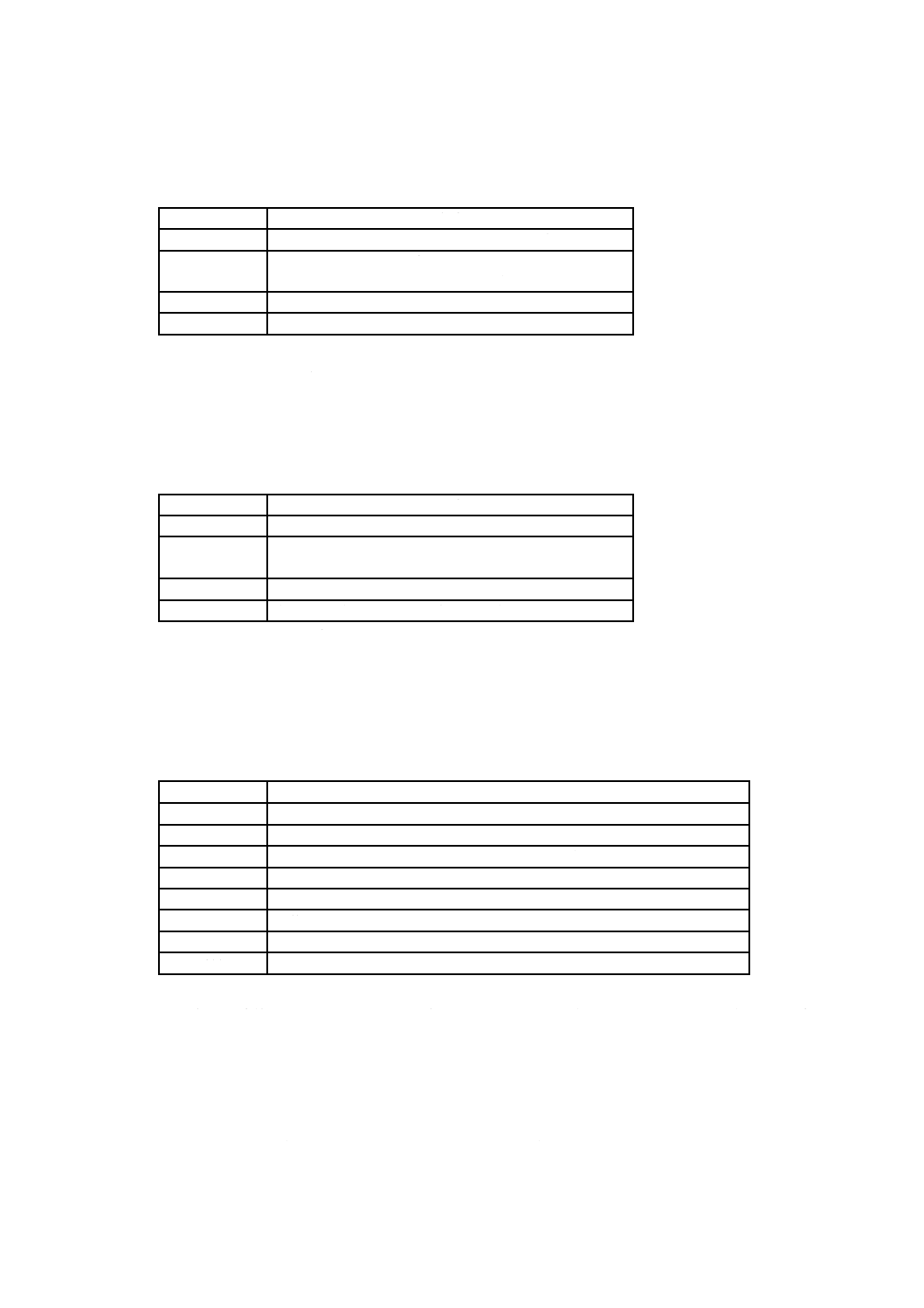
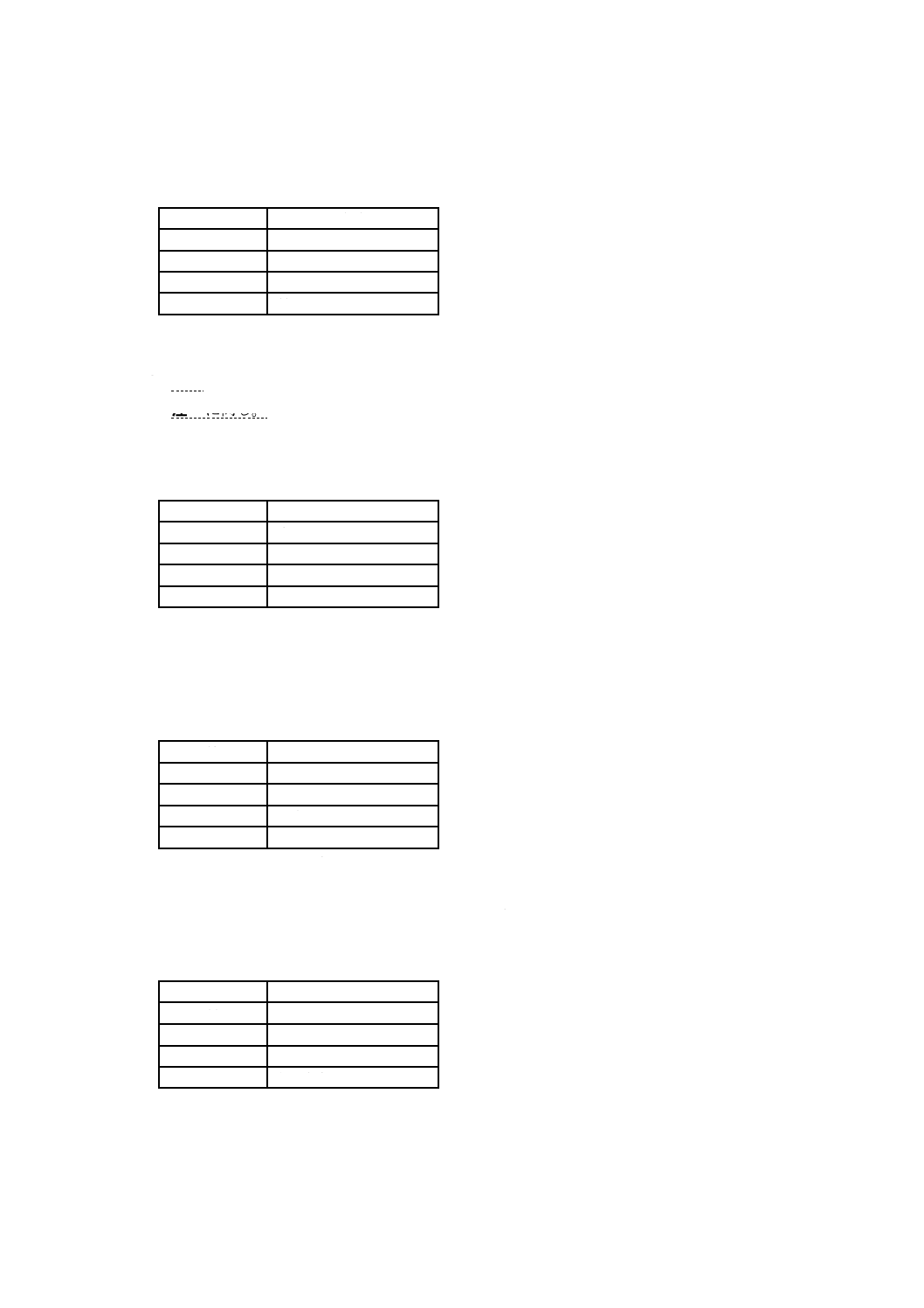
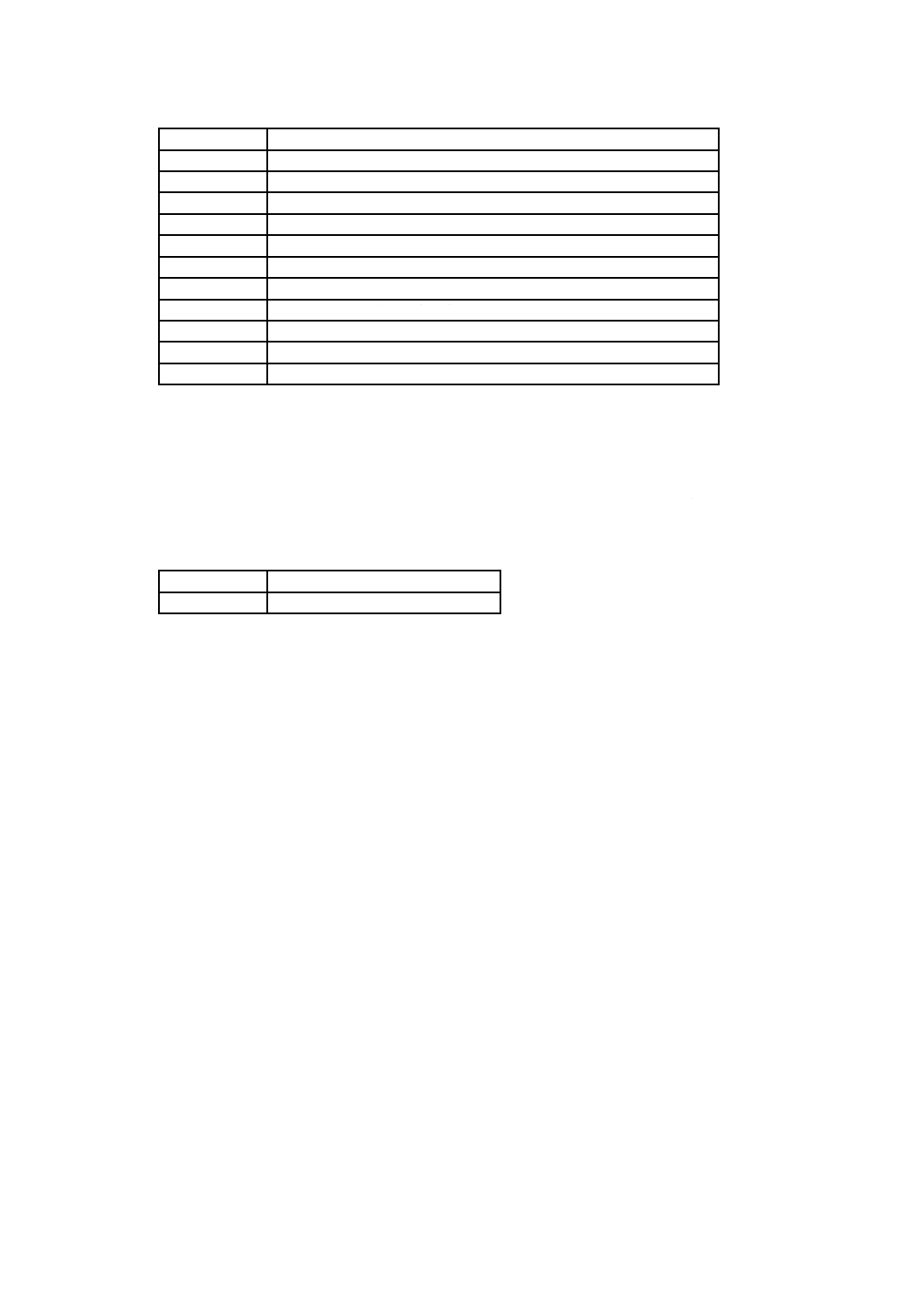
表1は送信信号の有効な値の範囲を,表2は離散パラメータの状態を示す範囲を,表3は制御モードコ
マンドの状態を示す範囲をそれぞれ定義する。“エラー指示値”の範囲は,センサ,サブシステム,又は
ECUが直ちに表示する場合に用いられる。
ECU故障でパラメータのための有効なデータ送信ができない場合は,表1又は表2に規定した適切なエ
ラー指示値を,そのパラメータデータの代わりに使用することが望ましい。測定データ又は計算データが,
定義されたパラメータ範囲を超えていても,有効な値が得られている場合は,エラー指示値を使用しては
ならない。データは,適切な最小又は最大のパラメータ値で送信する。センサが,測定データ又は計算デ
ータが有効かどうか判定できないときは,エラー指示値を送信しなければならない。
3.3.4
パラメータグループへの追加
幾つかのパラメータグループは,未定義で将来定義する新パラメータに代わるバイトを含む。既存のパ
ラメータグループ定義が,新しいパラメータを含むことを許可しない場合,新しいパラメータグループを
定義してもよい。
パラメータグループに追加するパラメータ,及び創出する新しいPGNの追加の定義,並びにこれらを要
求するための手順は,ISO 11783-1に示す。
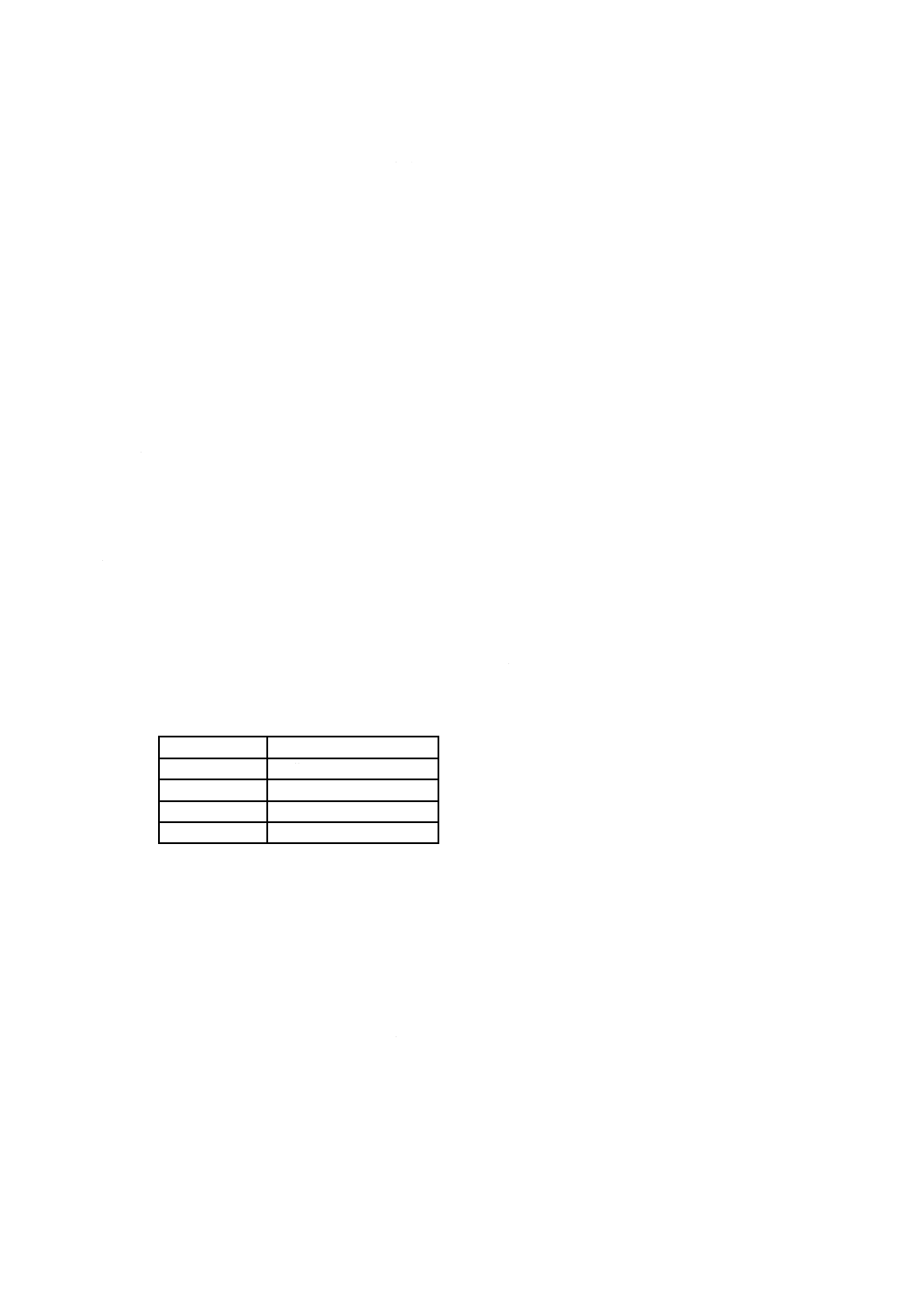
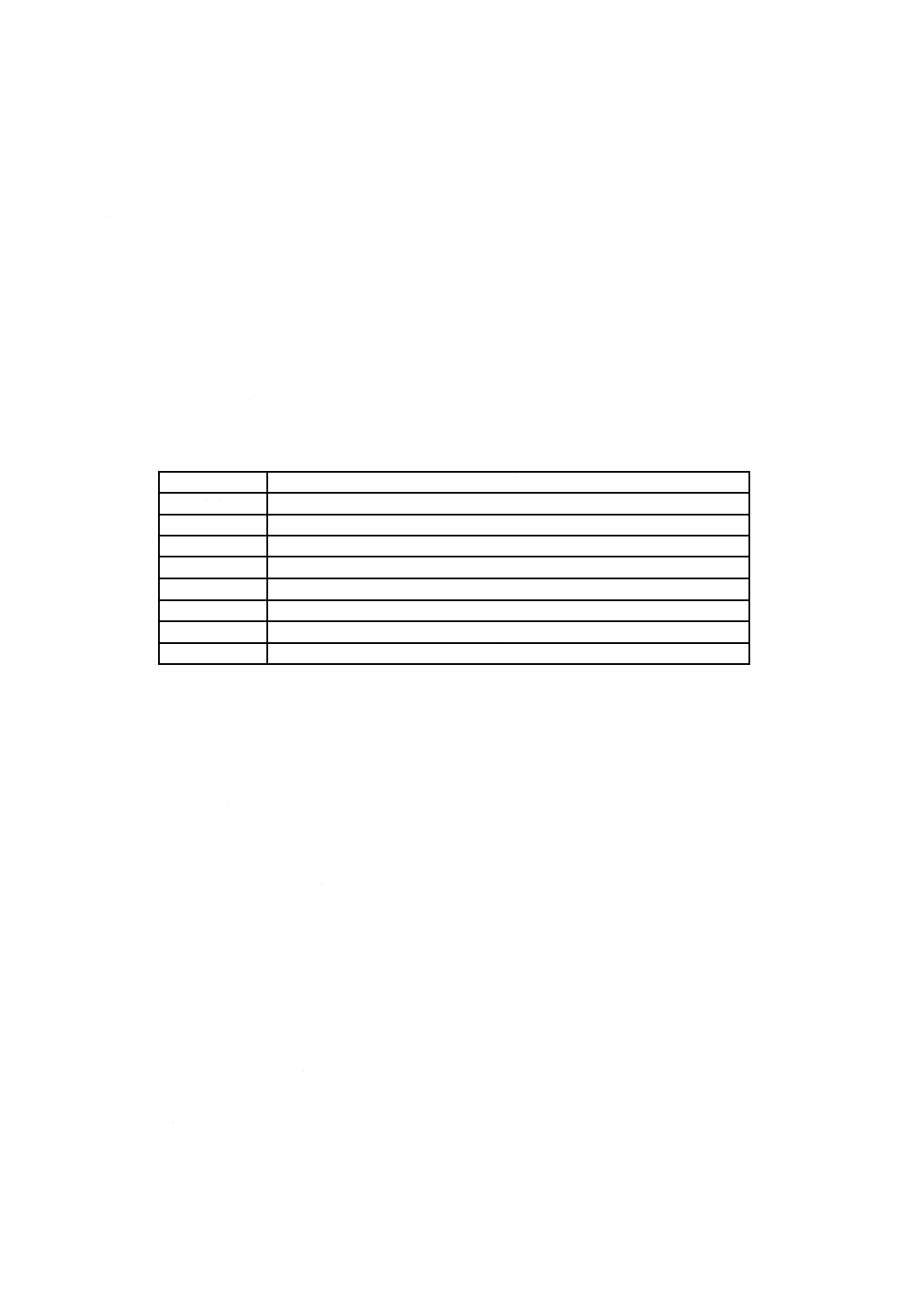
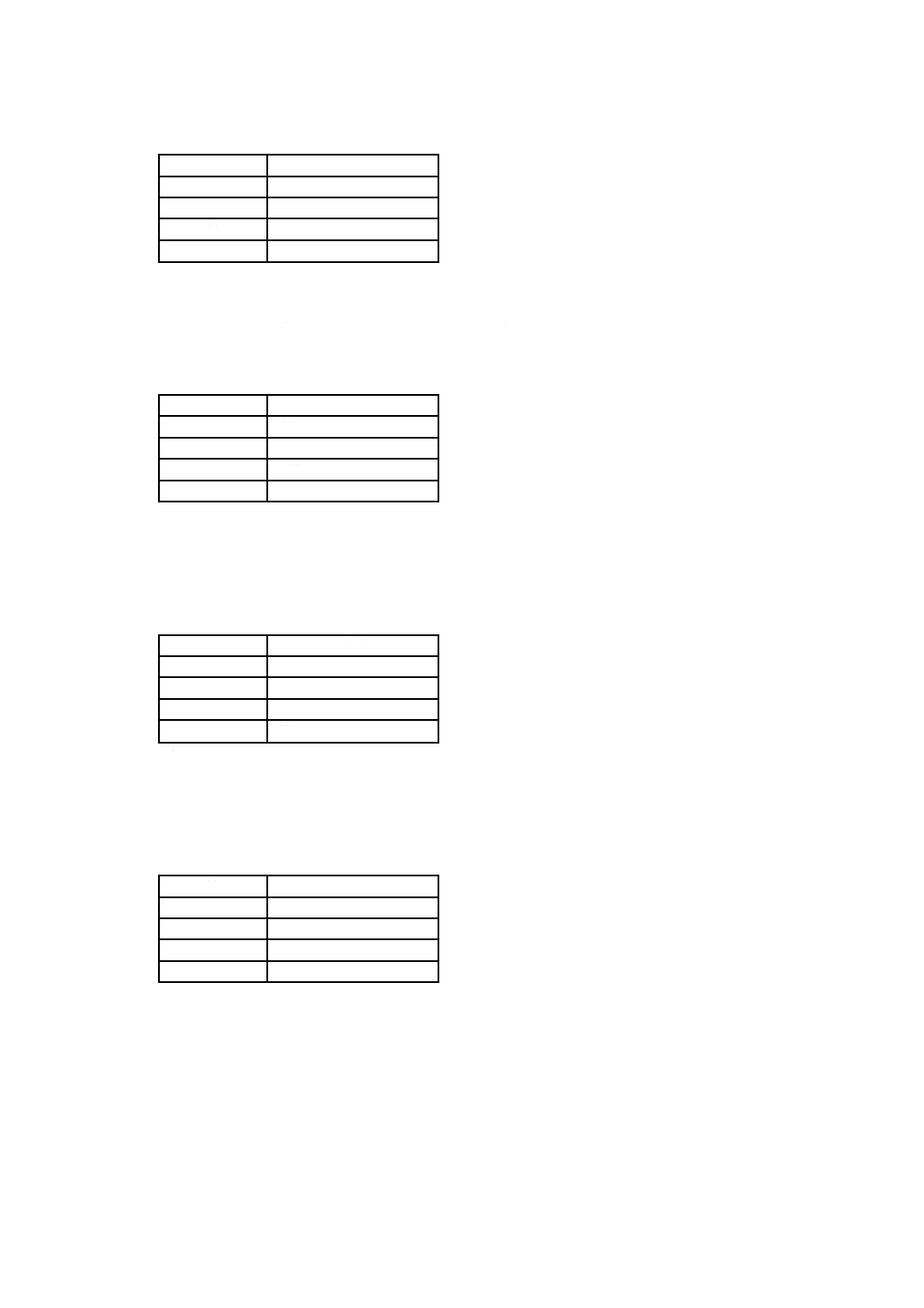
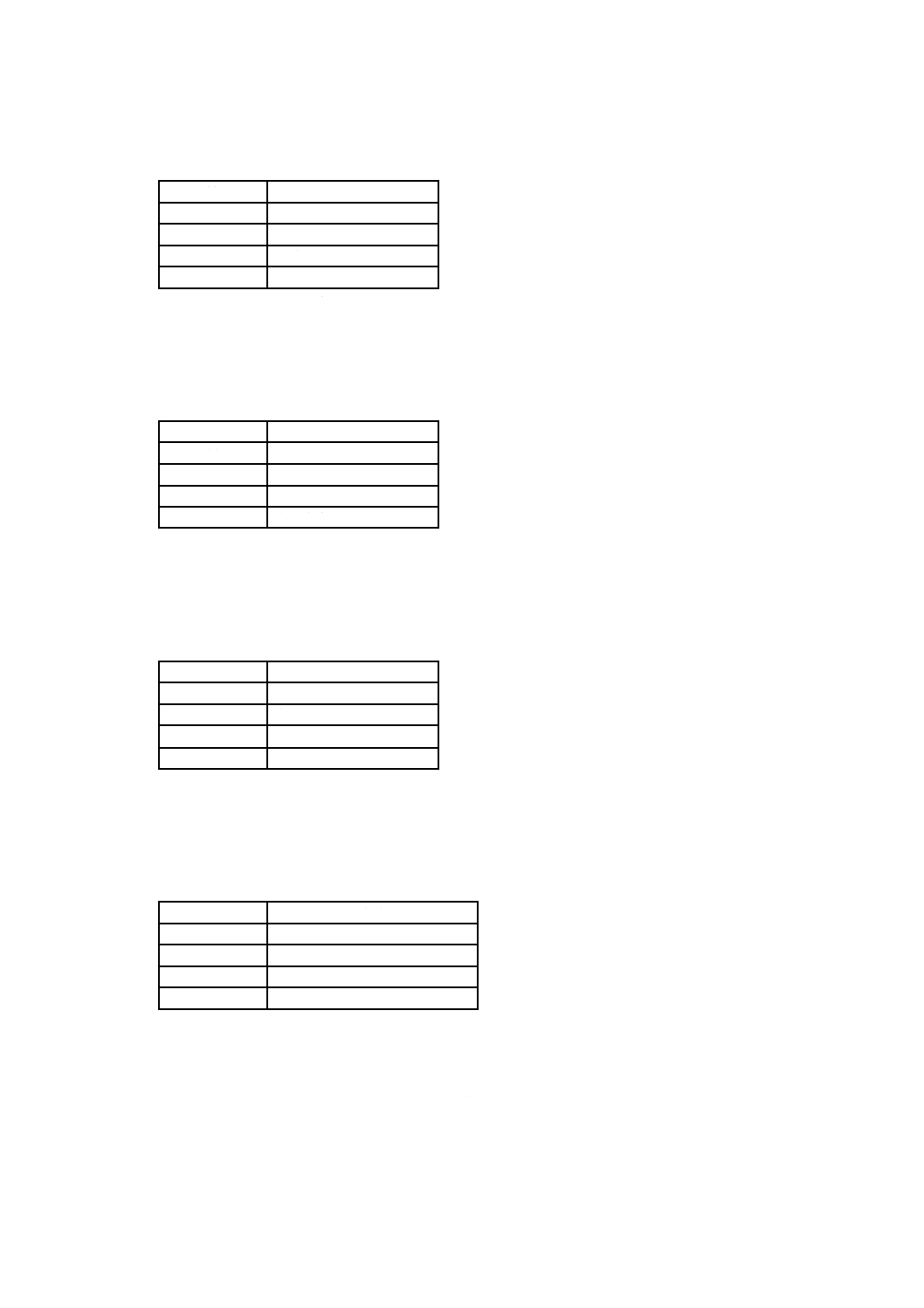
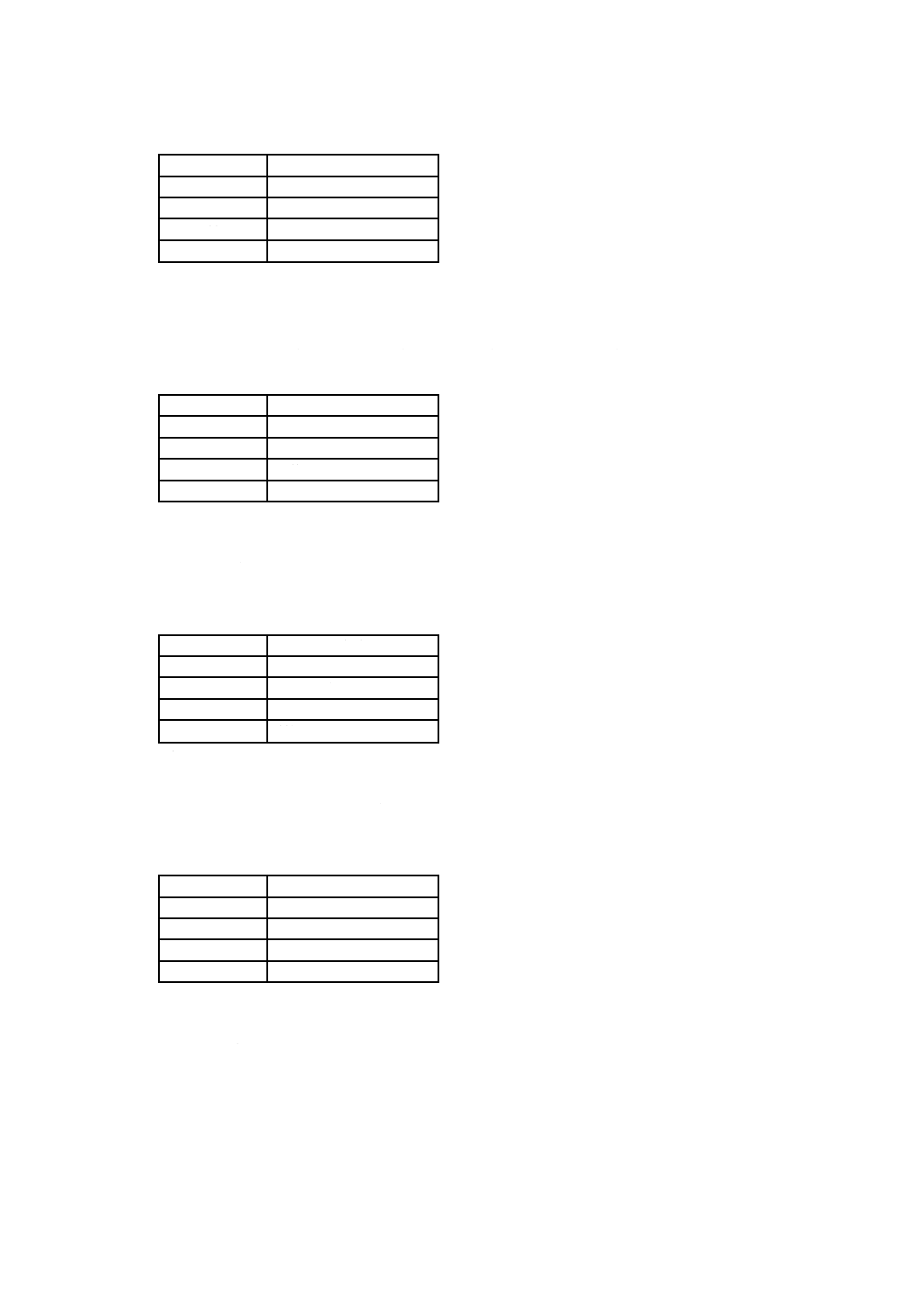
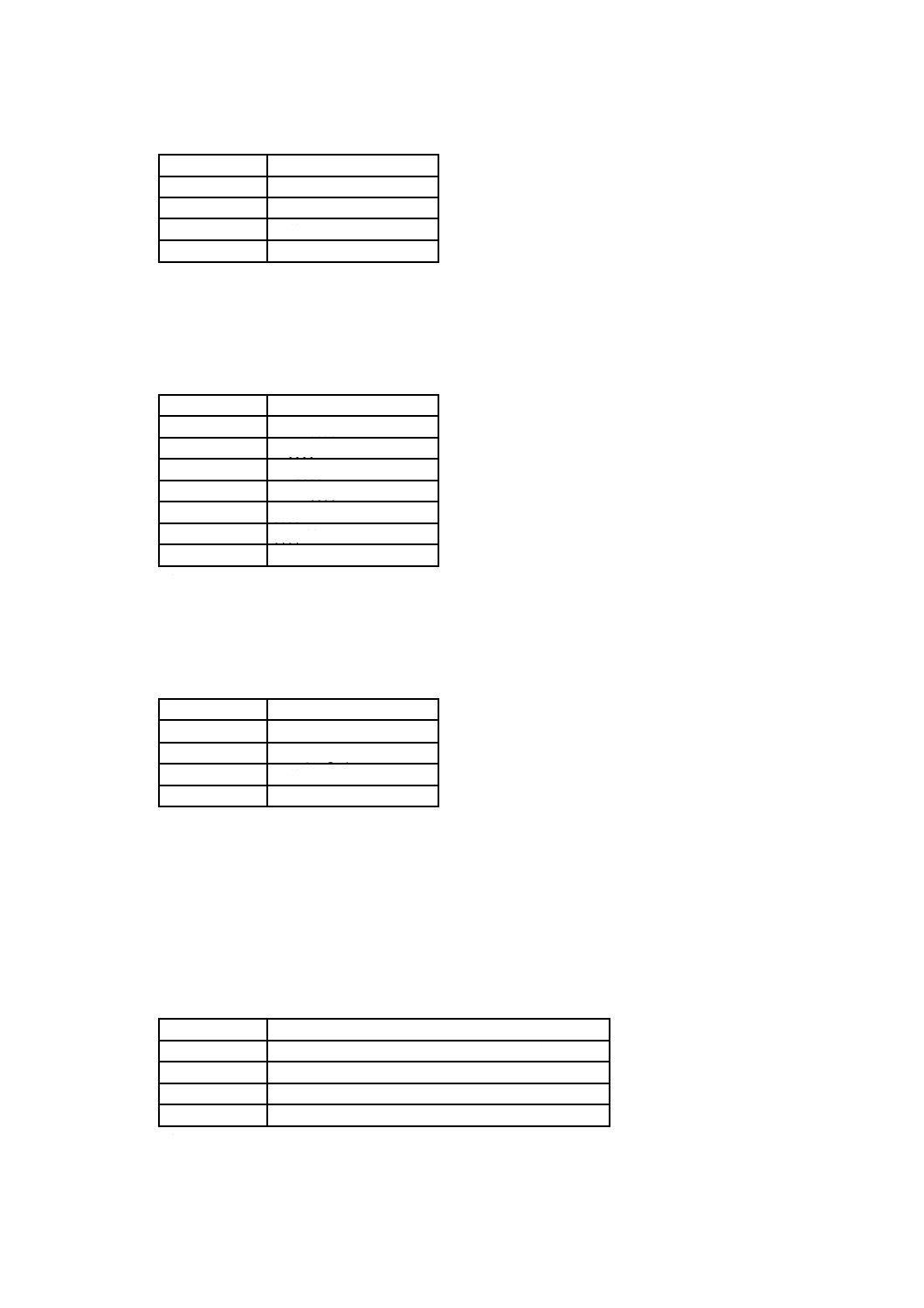
表1−送信信号範囲
範囲名
1バイト
2バイト
4バイト
ASCII
有効な信号
0〜250
0016〜FA16
0〜64 255
000016〜FAFF16
0〜4 211 081 215
0000000016〜FAFFFFFF16
1〜254
0116〜FE16
パラメータ特定表示値
251
FB16
64 256〜64 511
FBxx16
4 211 081 216〜4 277 858 431
FBxxxxxx16
None
将来の指示ビット用の
予約範囲
252〜253
FC16〜FD16
64 512〜65 023
FC0016〜FDFF16
4 227 858 432〜4 261 412 863
FC00000016〜FDFFFFFF16
None
エラー指示値
254
FE16
65 024〜65 279
FExx16
4 261 412 864〜4 278 190 079
FExxxxxx16
0
0016
使用不可,インストール
なし又は要求なし
255
FF16
65 280〜65 535
FFxx16
4 278 190 080〜4 294 967 294
FFxxxxxx16
255
FF16
5
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
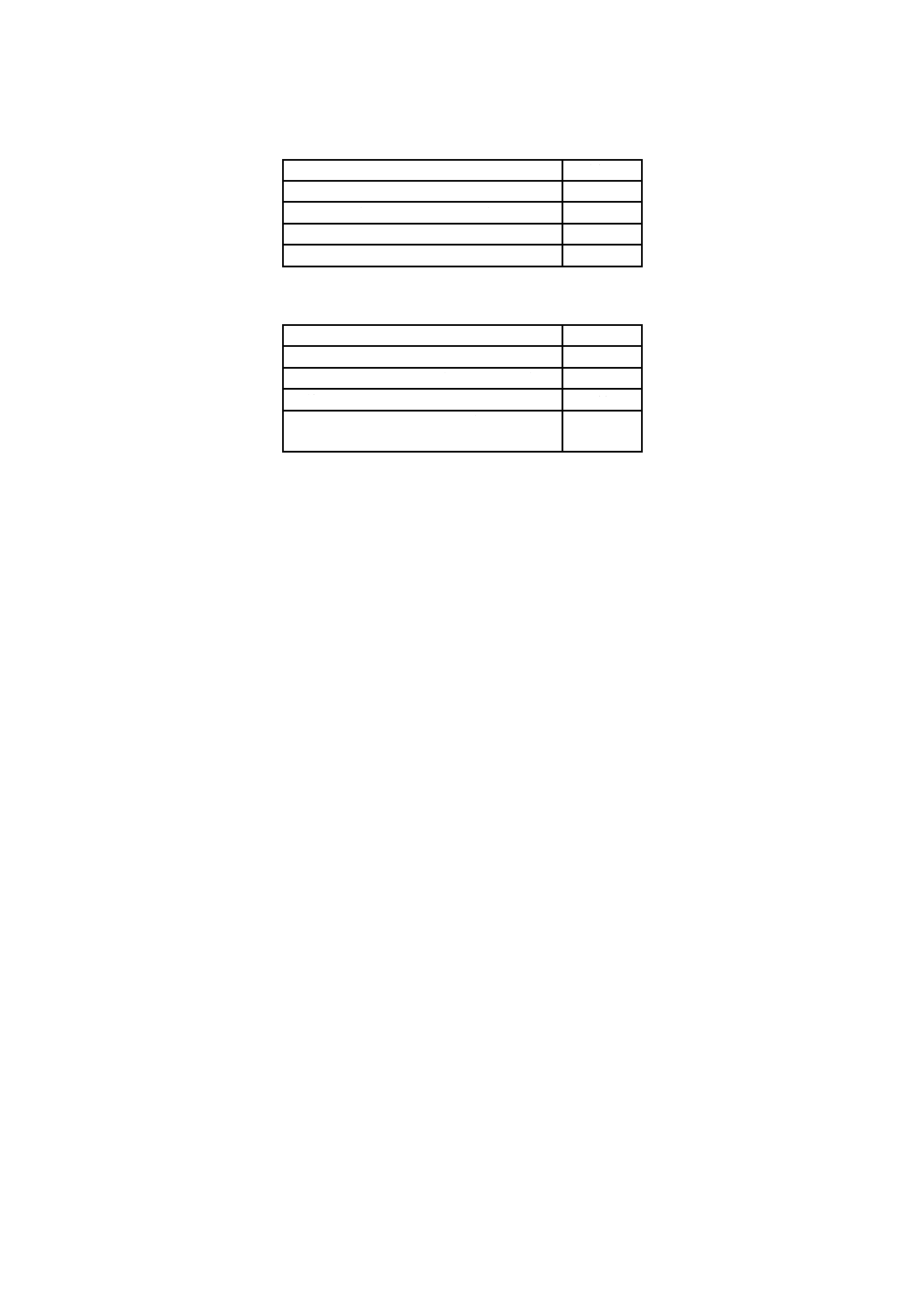
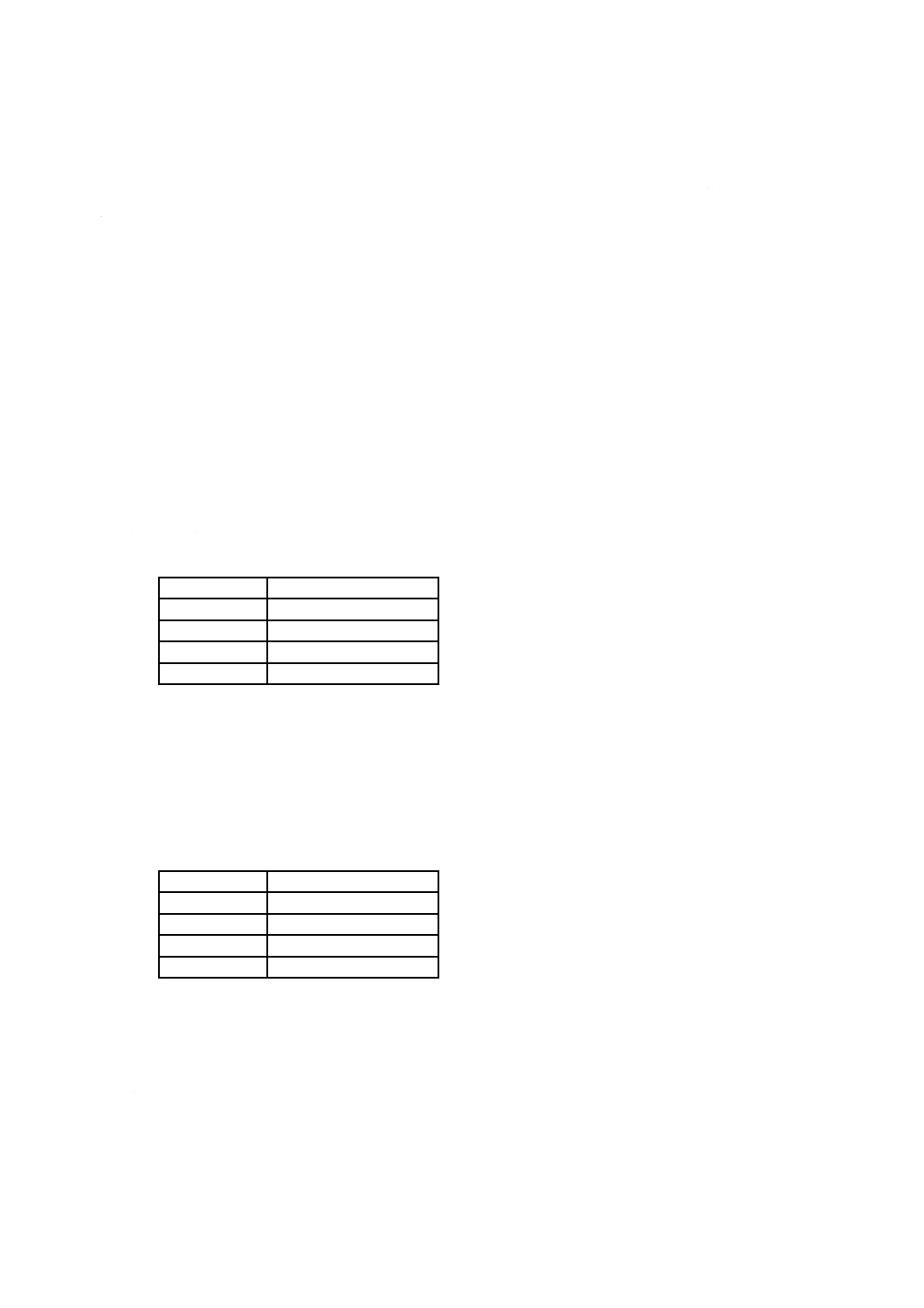
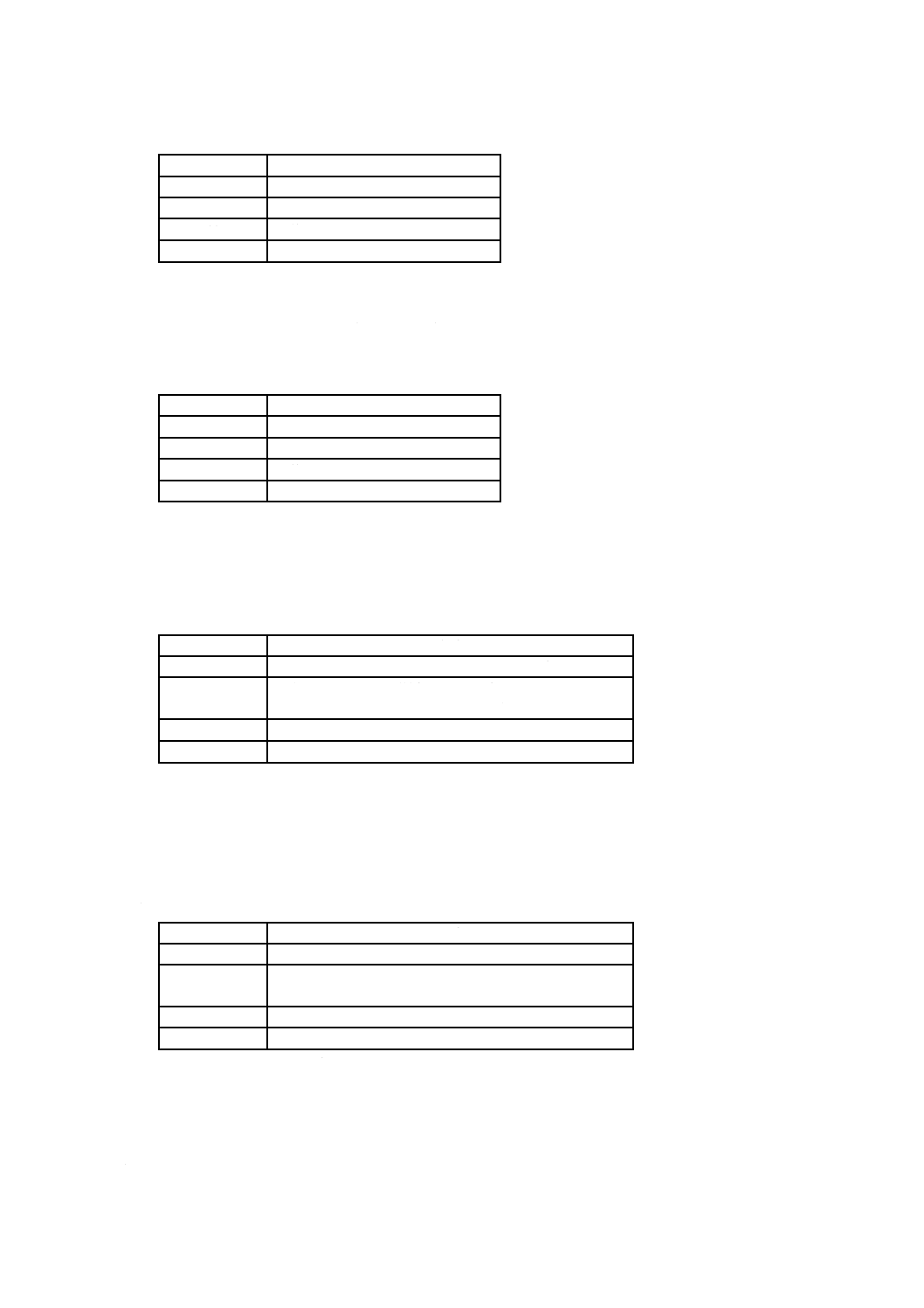
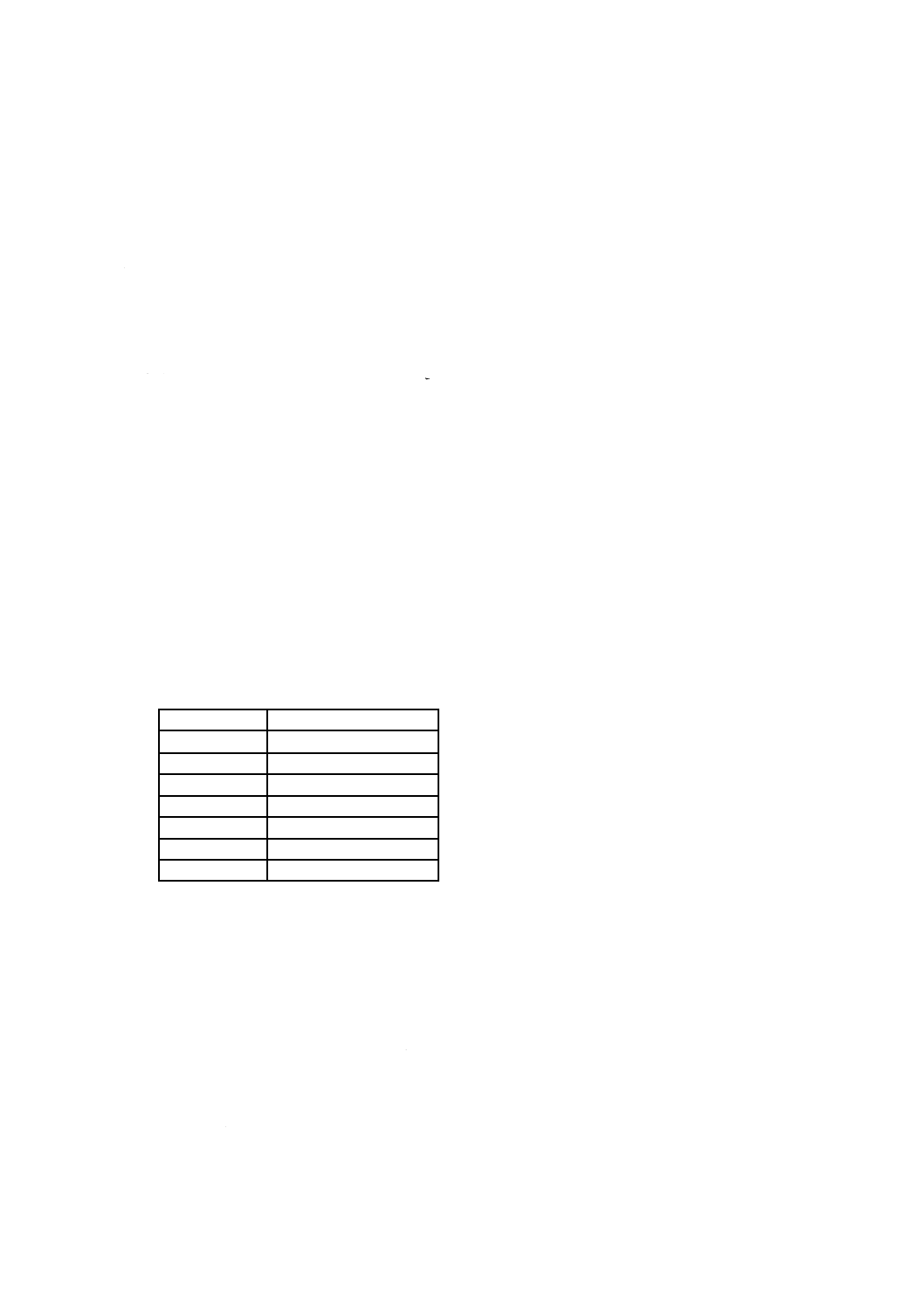
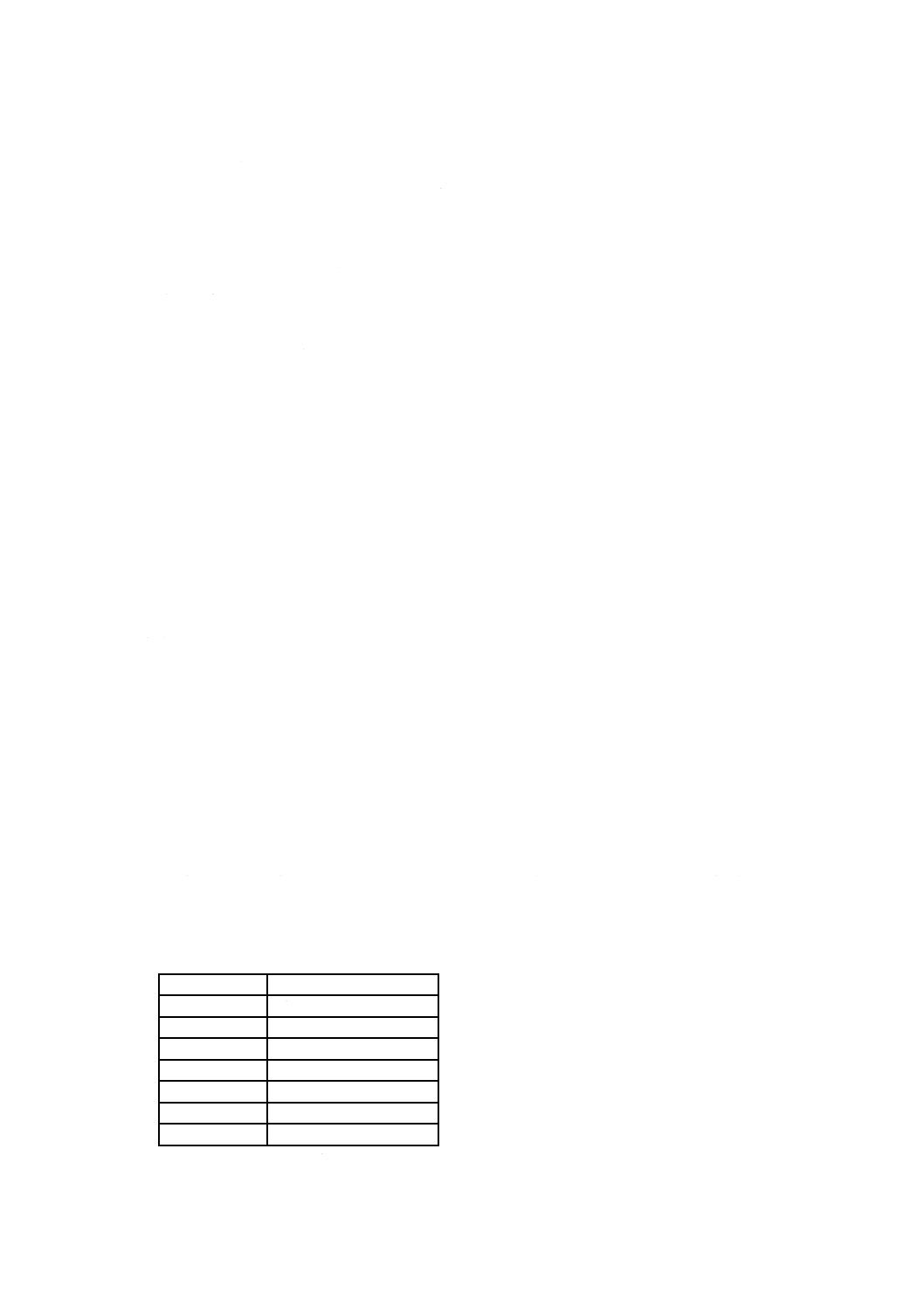
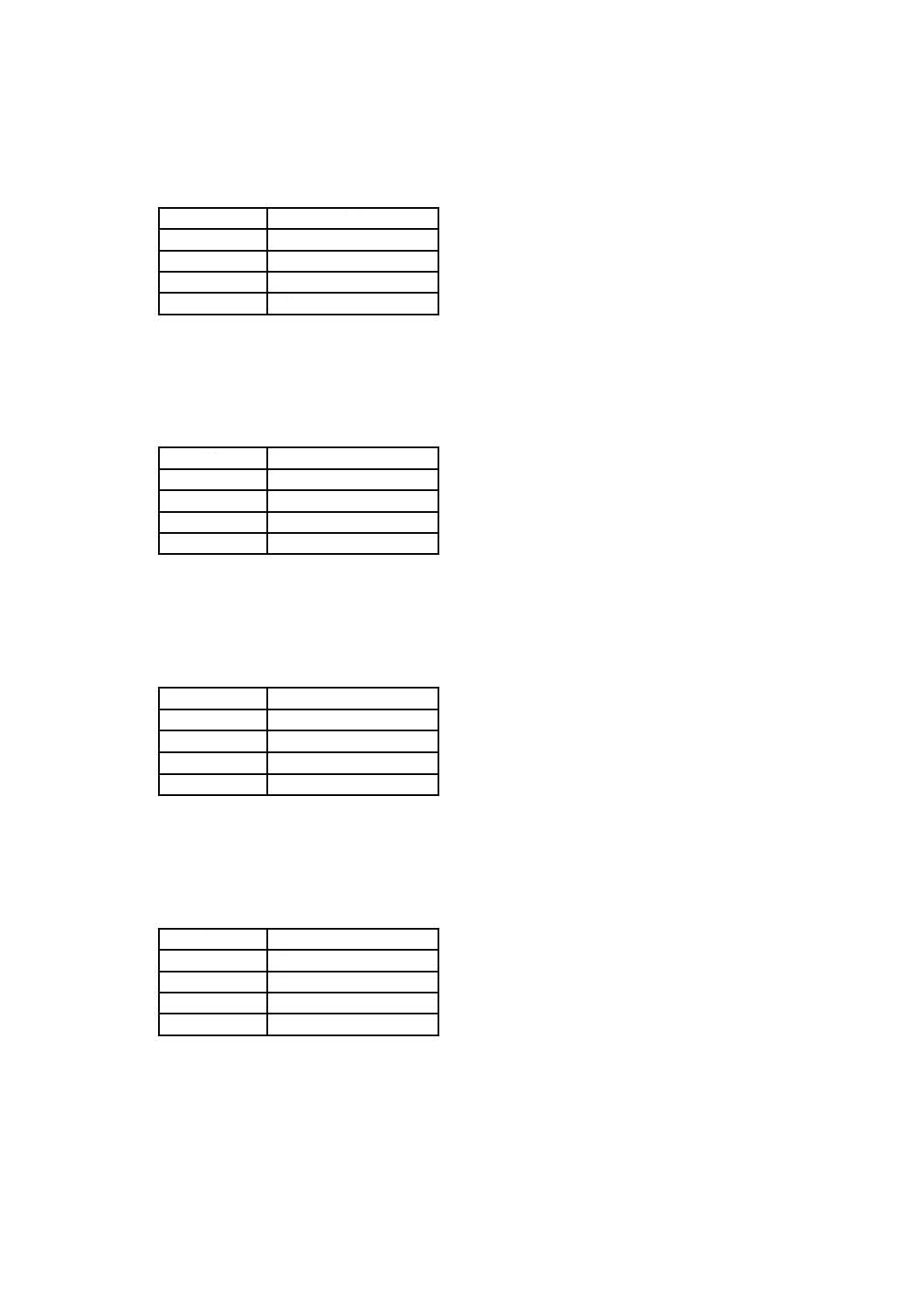
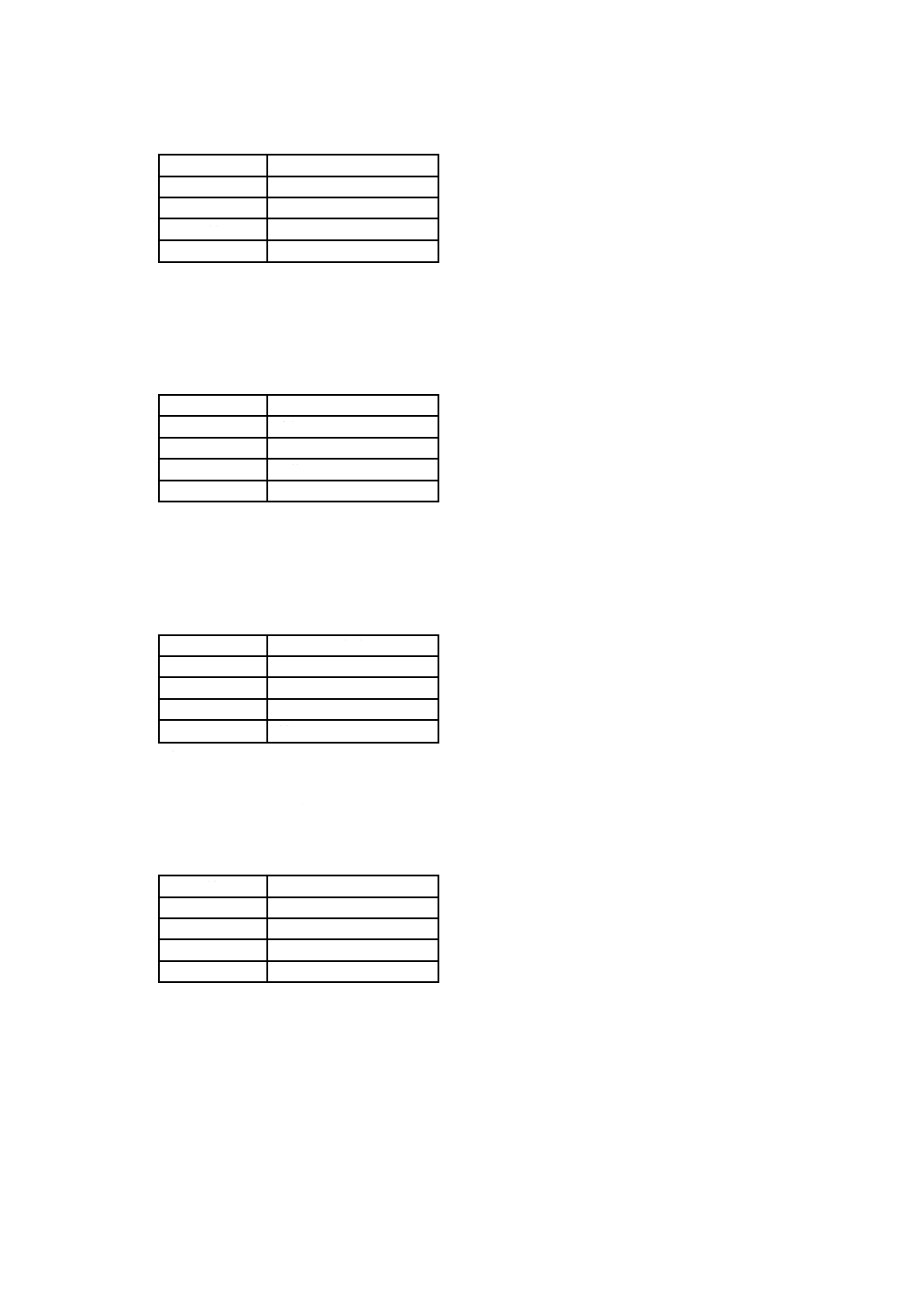
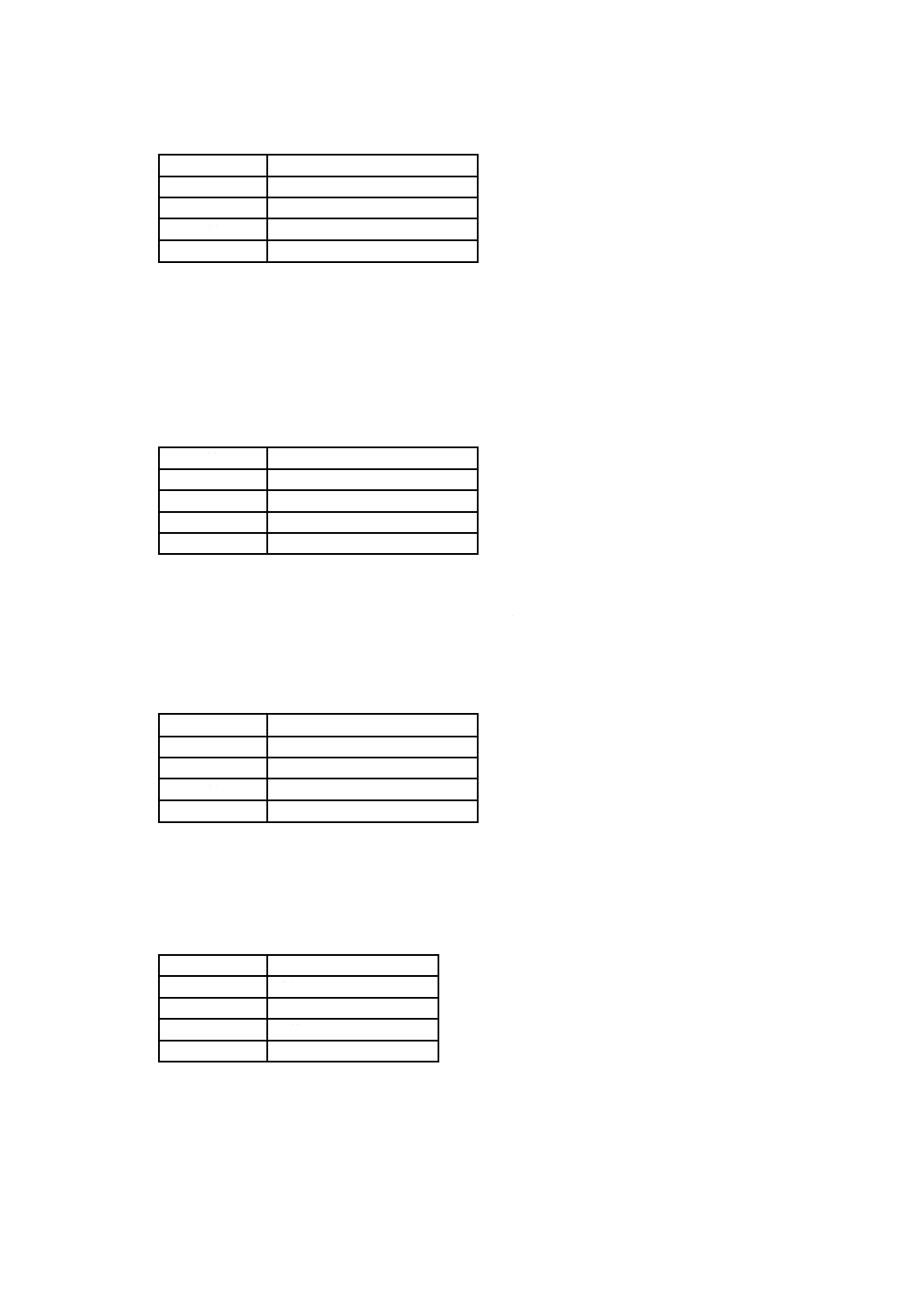
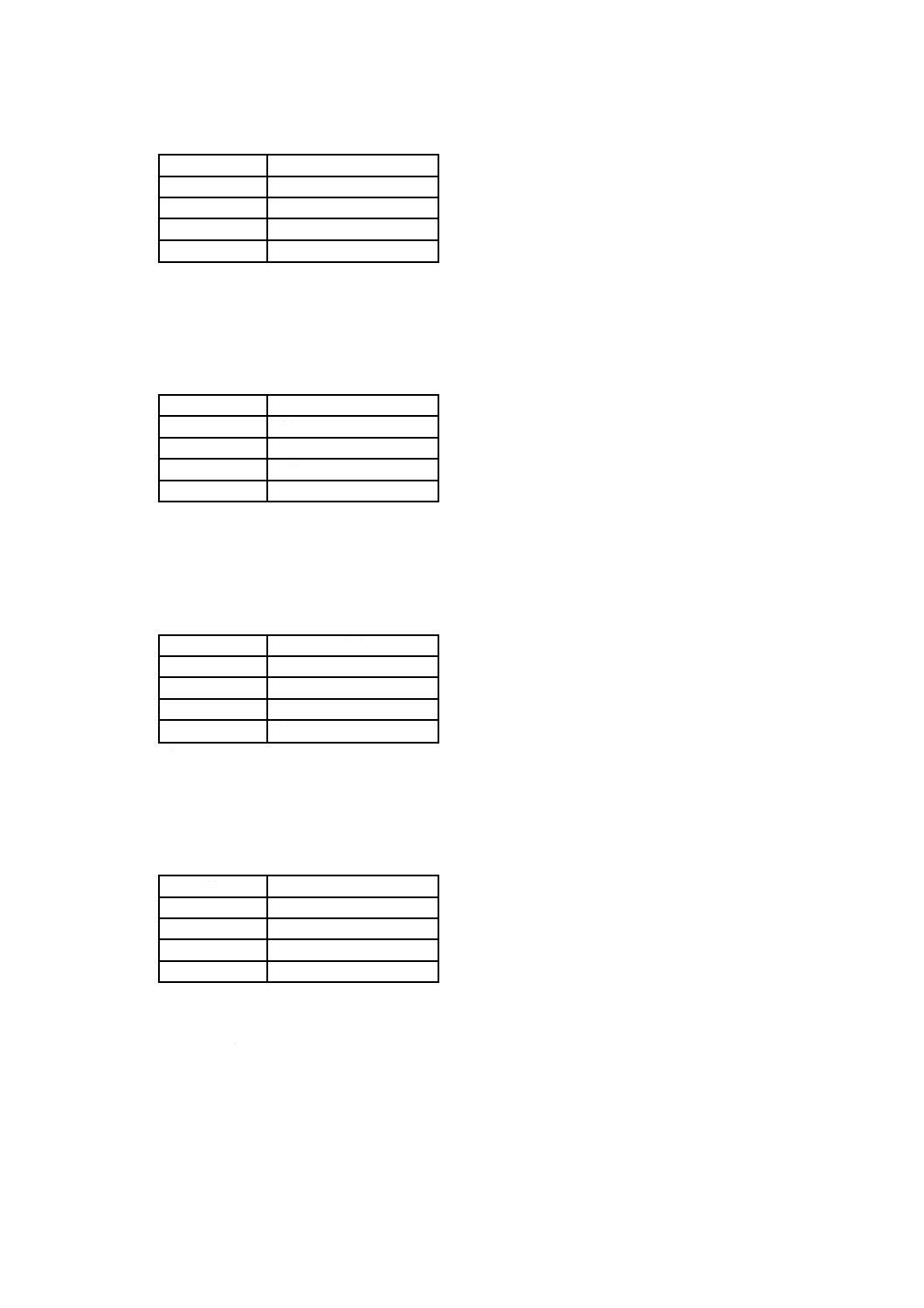
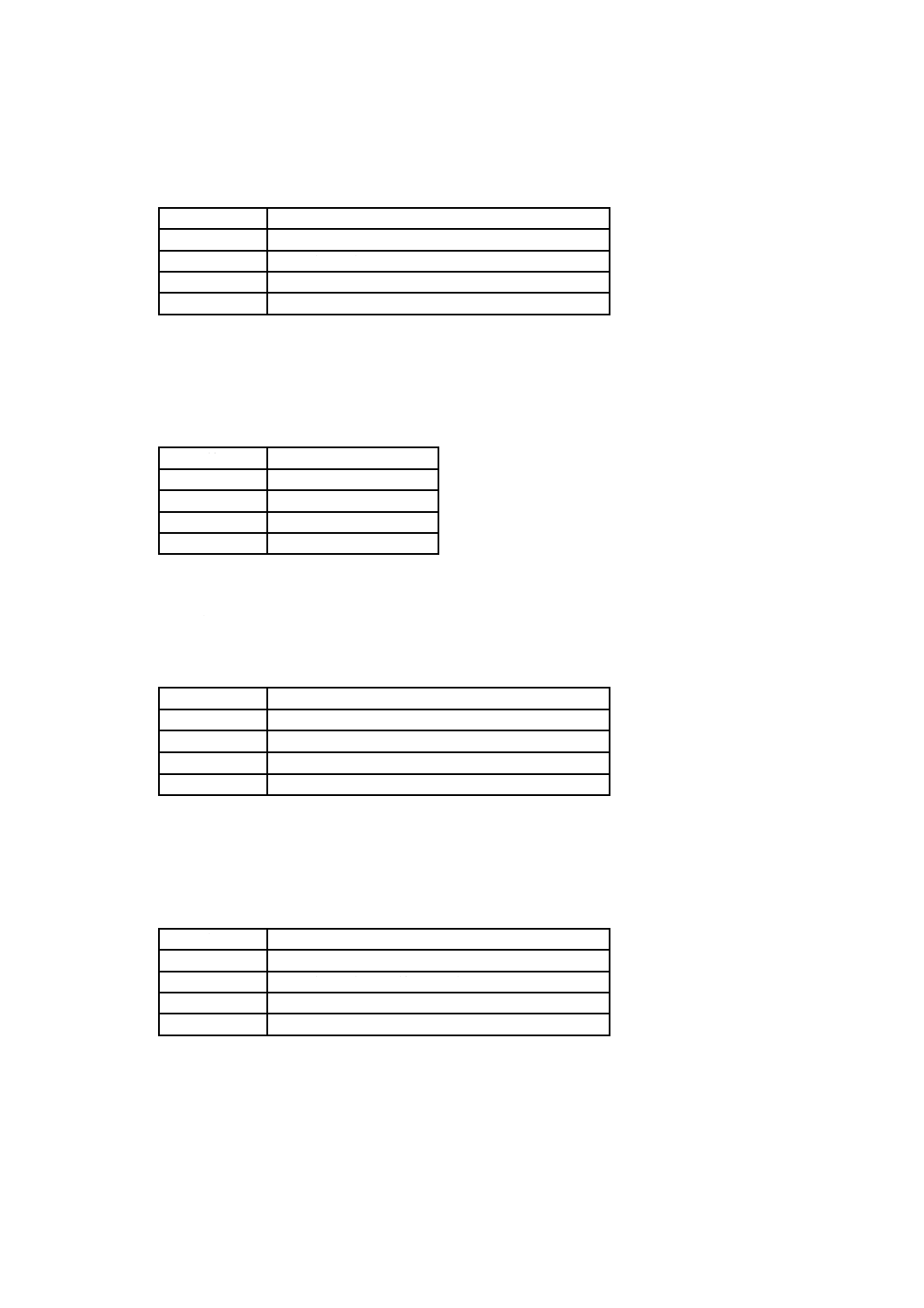
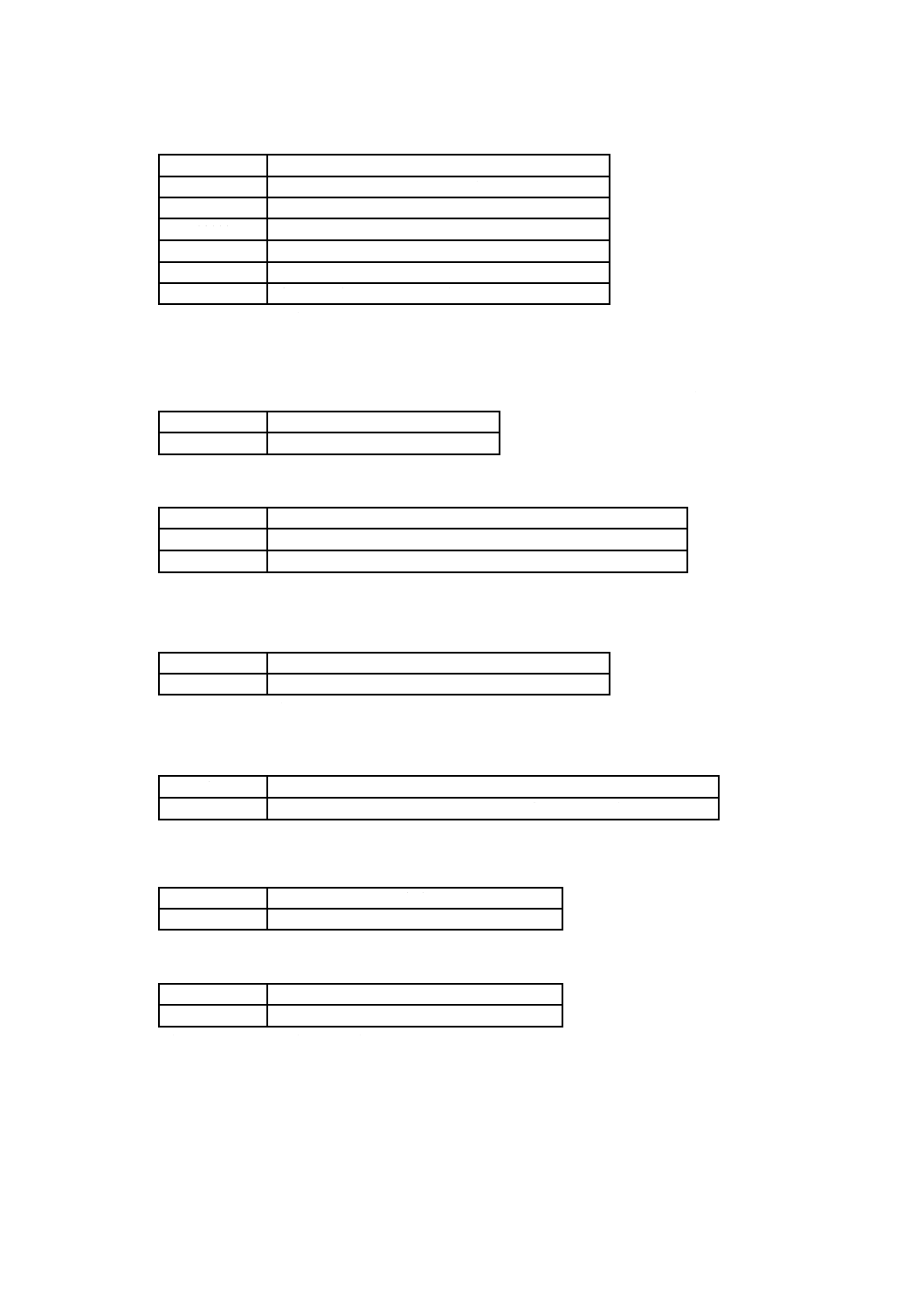
表2−離散パラメータ(測定)の送信値
範囲名
送信値
使用不可(オフ,能動の,など)
00
使用可能(オン,能動の,など)
01
エラー指示値
10
使用不可又はインストールなし
11
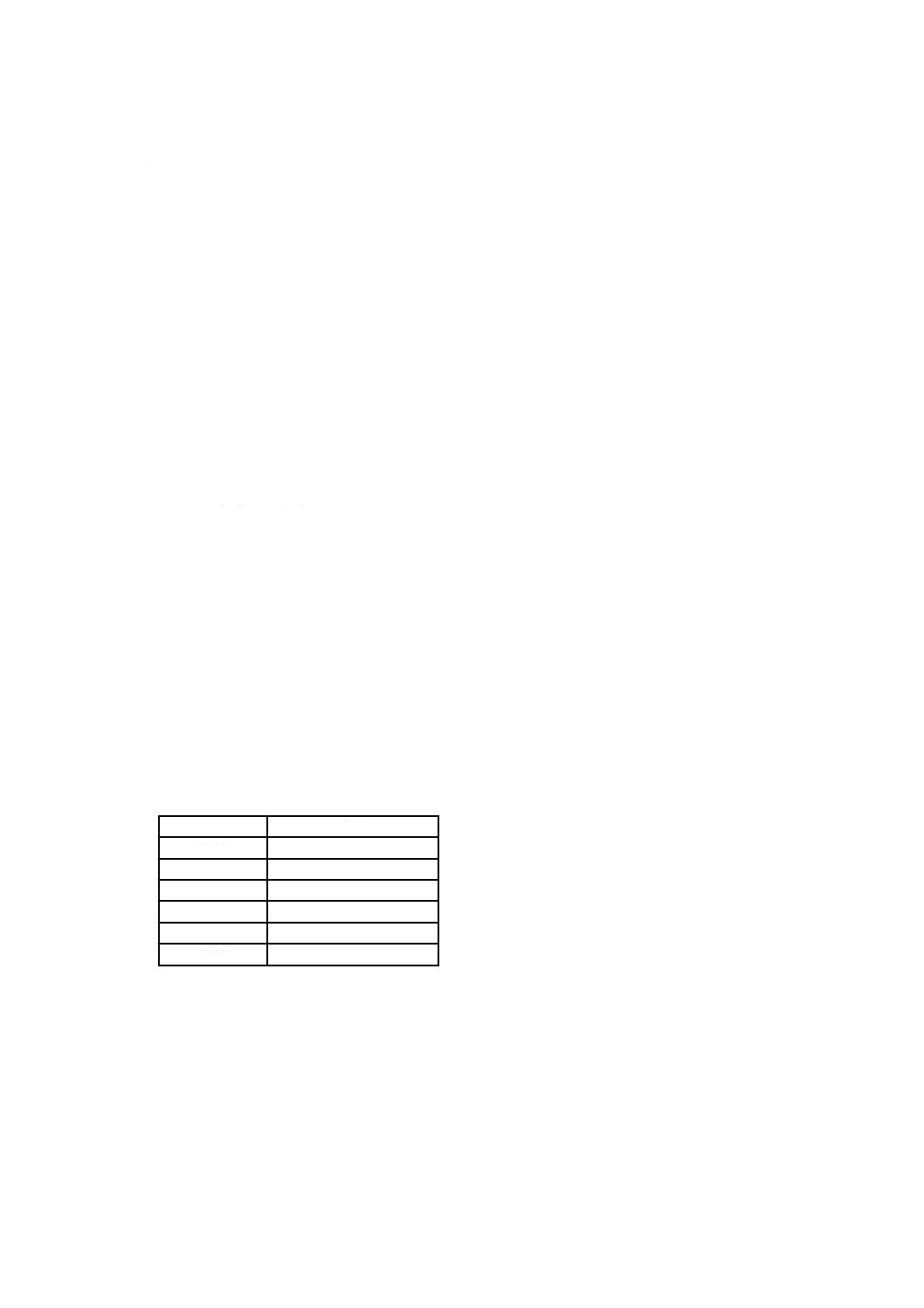
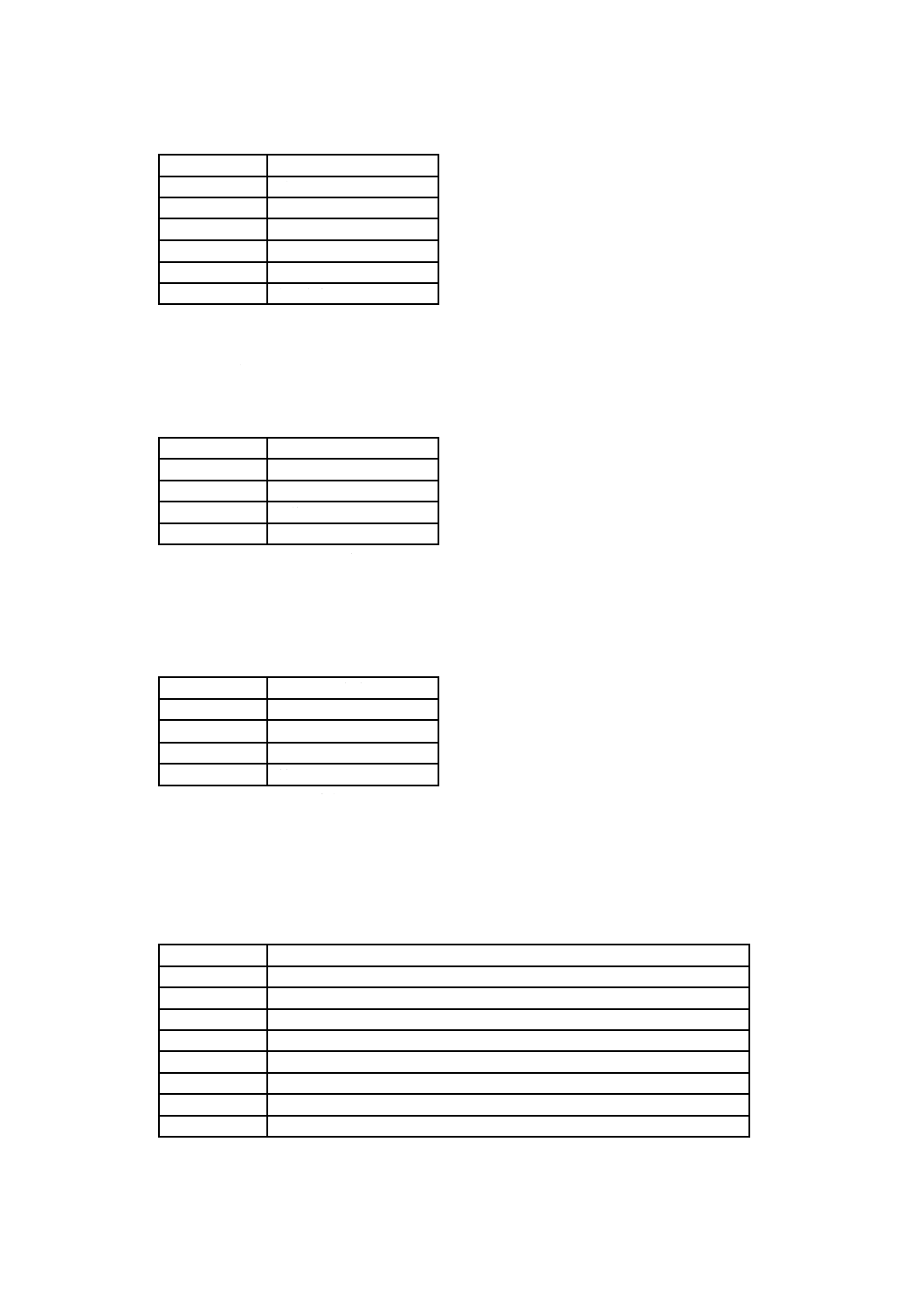
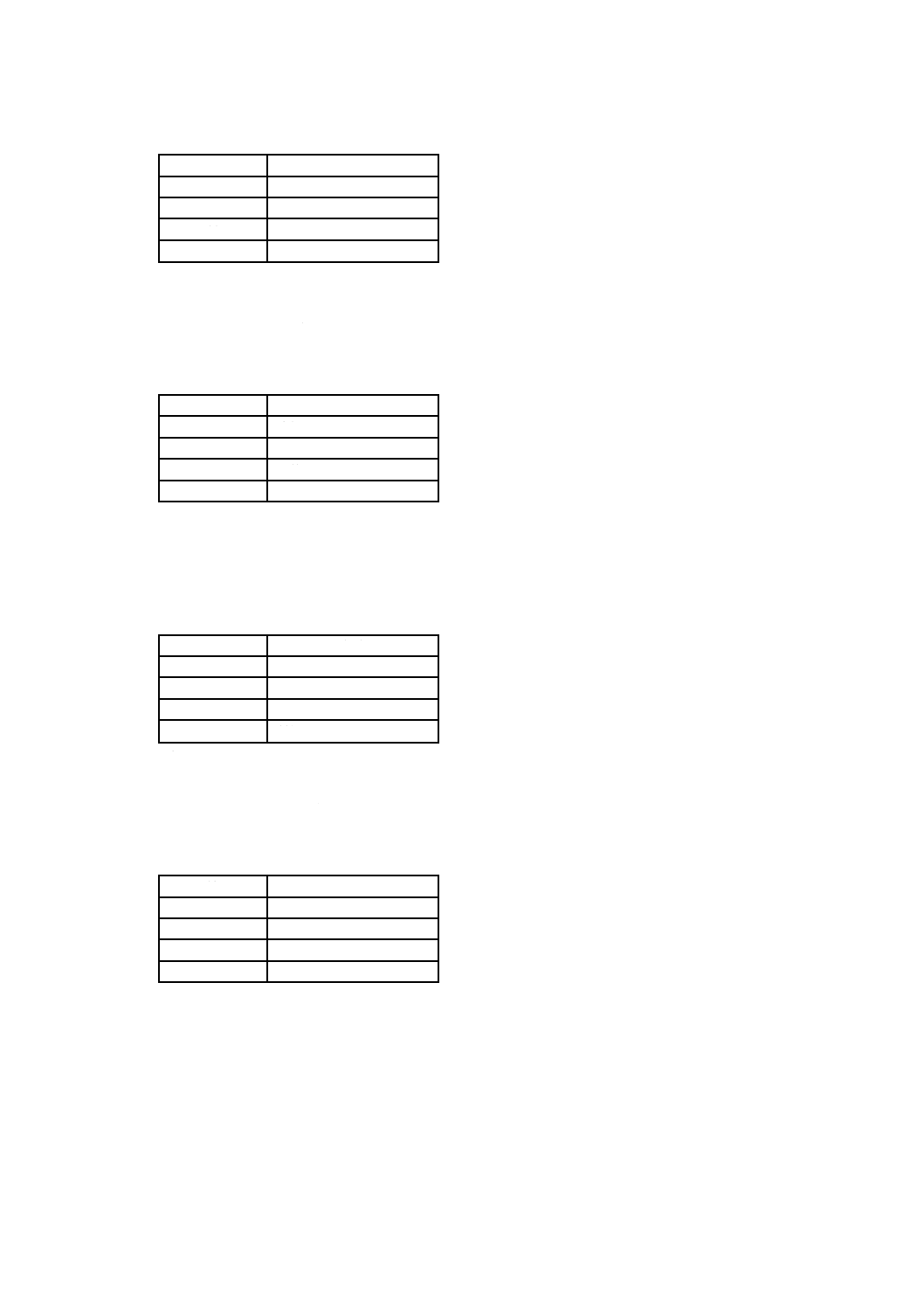
表3−制御コマンドの送信値
範囲名
送信値
機能使用不可コマンド(止める,など)
00
機能使用可能コマンド(入れる,など)
01
予約
10
ドントケア(状態を維持)/何もしない。
(状態を変更しない。)
11
3.4
作業機の機器構成オフセット
トラクタと作業機との連結構成値,及びトラクタと作業機との連結基準点との距離は,ナビゲーション
パラメータ及びプロセスデータメッセージの作業機構成の中で使用する。JIS B 9225-10参照。
6
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
パラメータ定義
A.1 協定世界標準時(UTC)
次の3パラメータが,協定世界標準時[Universal Time Coordinate: UTC(以下,UTCという。)]での現
在時間を提供する。ローカル時間オフセットパラメータ(A.4)が125(FA16)と等しいとき,時間パラメ
ータは,UTCに代わりローカル時間となる。
データ長:
3バイト
分解能:
バイト1 = 0.25 s/bit,0 sオフセット−サスペクトパラメータ番号
(以下,SPNという。)959
バイト2 = 1 min/bit,0 min オフセット−SPN 960
バイト3 = 1 h/bit,0 h オフセット−SPN 961
作動範囲:
バイト1 = 0 s to 59.75 s;
バイト2 = 0 min〜59 min;
バイト3 = 0 h〜23 h
タイプ:
測定値
A.2 日付
次の3パラメータは,UTCでの現在の年月日を提供する。ローカル時間オフセットパラメータ(A.4)
が125(FA16)に等しいとき,日付(date)パラメータは,UTCに代わりローカル日付となる。
データ長:
3バイト
分解能:
バイト1 = 1 month/bit,0 month オフセット−SPN 963
バイト2 = 0.25 d/bit,0 day オフセット−SPN 962
バイト3 = 1 y 1)/bit,1985 year オフセット−SPN 964
作動範囲:
バイト1 = 1 month〜12 months
バイト2 = 0.25 d〜31.75 d
バイト3 = 1985 (year)〜2235 (year)
タイプ:
測定値
注記 月(バイト1)の値が0の場合は,Null(空)値を意味する。1は1月を意味し,2は2月を意
味し,以下同様となる。日(バイト2)の値が0の場合は,空値を意味する。1,2,3及び4
は,月最初の日(1日)を意味し,5,6,7及び8は,月の2番目の日(2日)を意味し,以下
同様となる。年(バイト3)の値が0の場合は,1985年を規定し,1は1986を規定する。
注1) SI単位系では,“年”(annum)はaを用いる。
A.3 ローカル分オフセット
ローカル分オフセットは,UTCとローカル時間との年月日間の差を分で表したものである。この値は,
ローカル時間の年月日を決めるときに,UTC時間の年月日に加算する。ローカルオフセットは,グリニッ
7
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ジ子午線から東側に向かって国際日付変更線までは正の値であり,グリニッジ子午線から西側に向かって
国際日付変更線までは負の値である。ローカル分オフセットは,時間及び年月日のパラメータがUTCの時
間と年月日とで表されているときにだけ適用可能である。
データ長:
1バイト
分解能:
1 min/bit,−125 min オフセット
作動範囲:
−59 min〜59 min
タイプ:
測定値
SPN:
1601
A.4 ローカル時間オフセット
ローカル時間オフセットは,UTCとローカル時間との年月日間の差を時間単位で表したものである。こ
の値は,ローカル時間の年月日を決めるときに,UTC時間の年月日に加算する。ローカルオフセットは,
グリニッジ子午線から東側に向かって国際日付変更線までは正の値であり,グリニッジ子午線から西側に
向かって国際日付変更線までは負の値である。
データ長:
1バイト
分解能:
1 h/bit,−125 h オフセット
作動範囲:
−23 h〜23 h
タイプ:
測定値
SPN:
1602
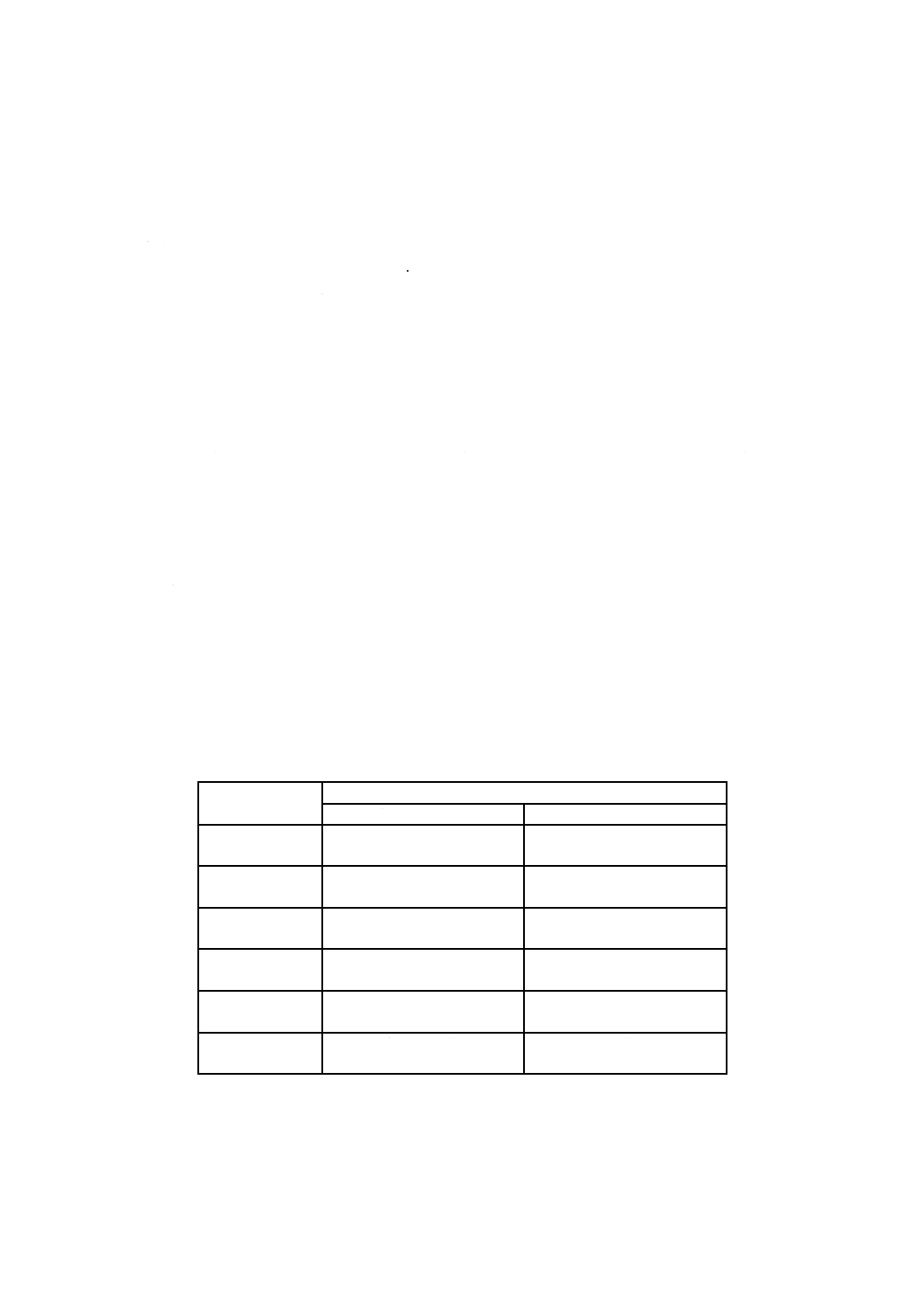
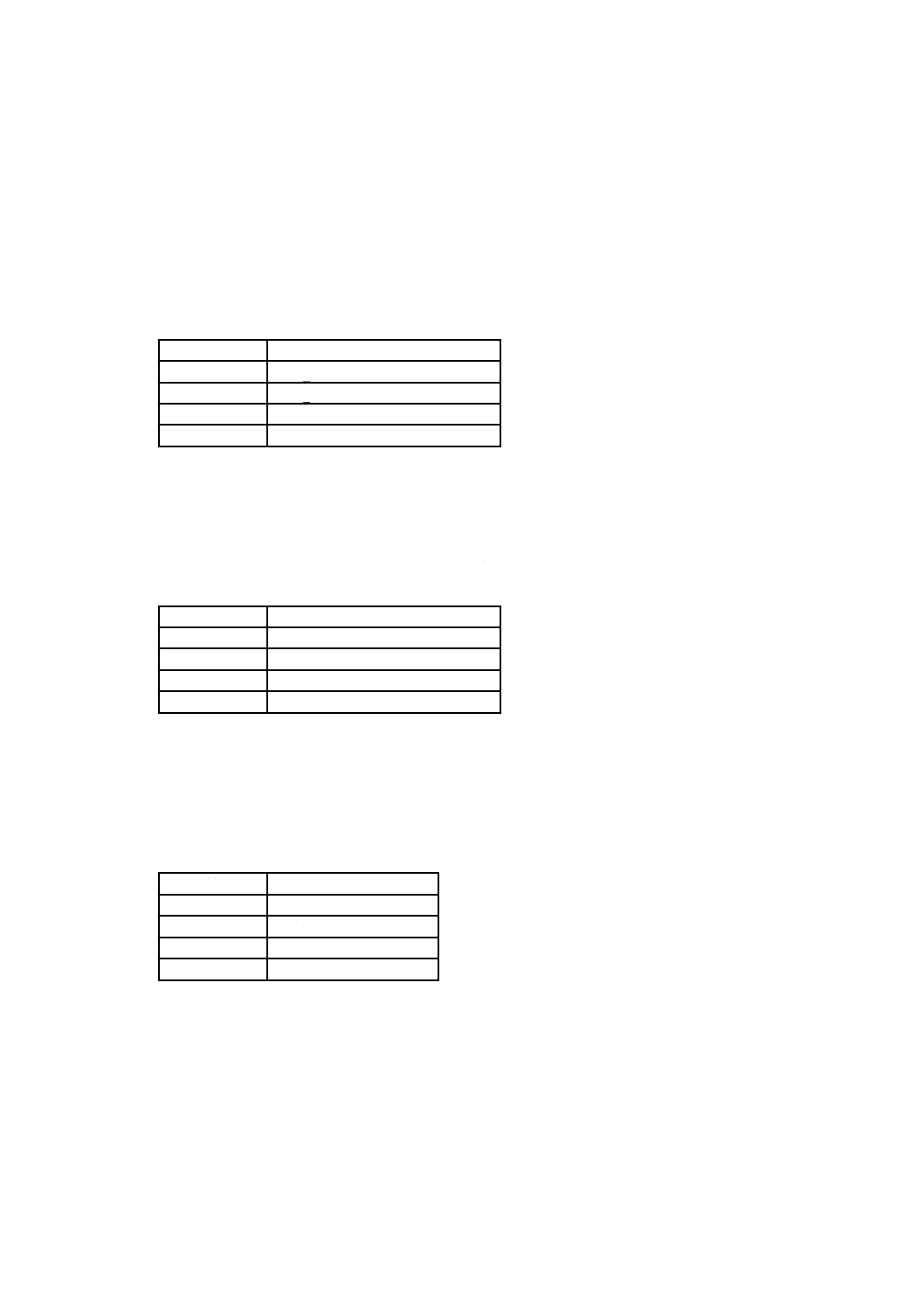
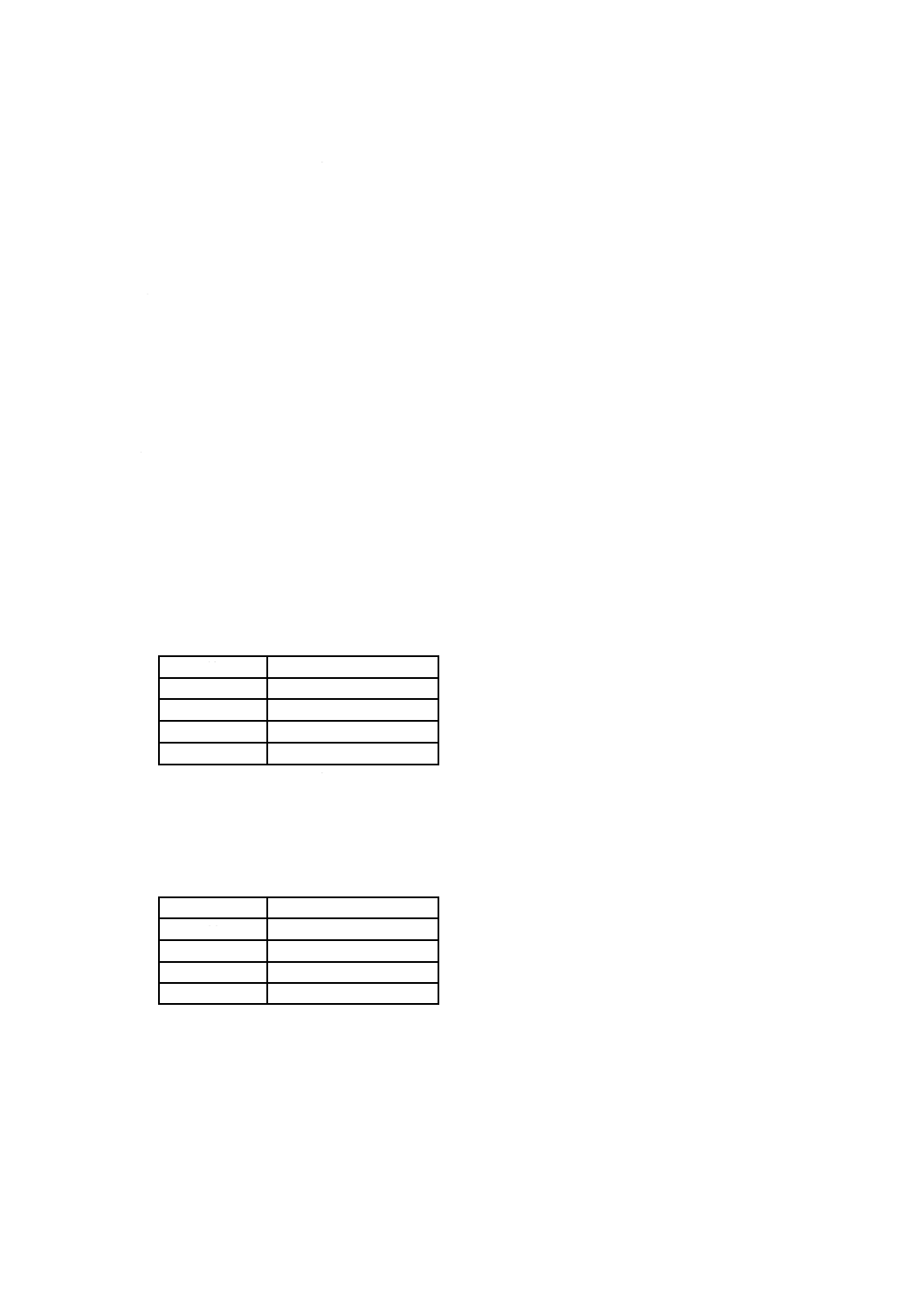
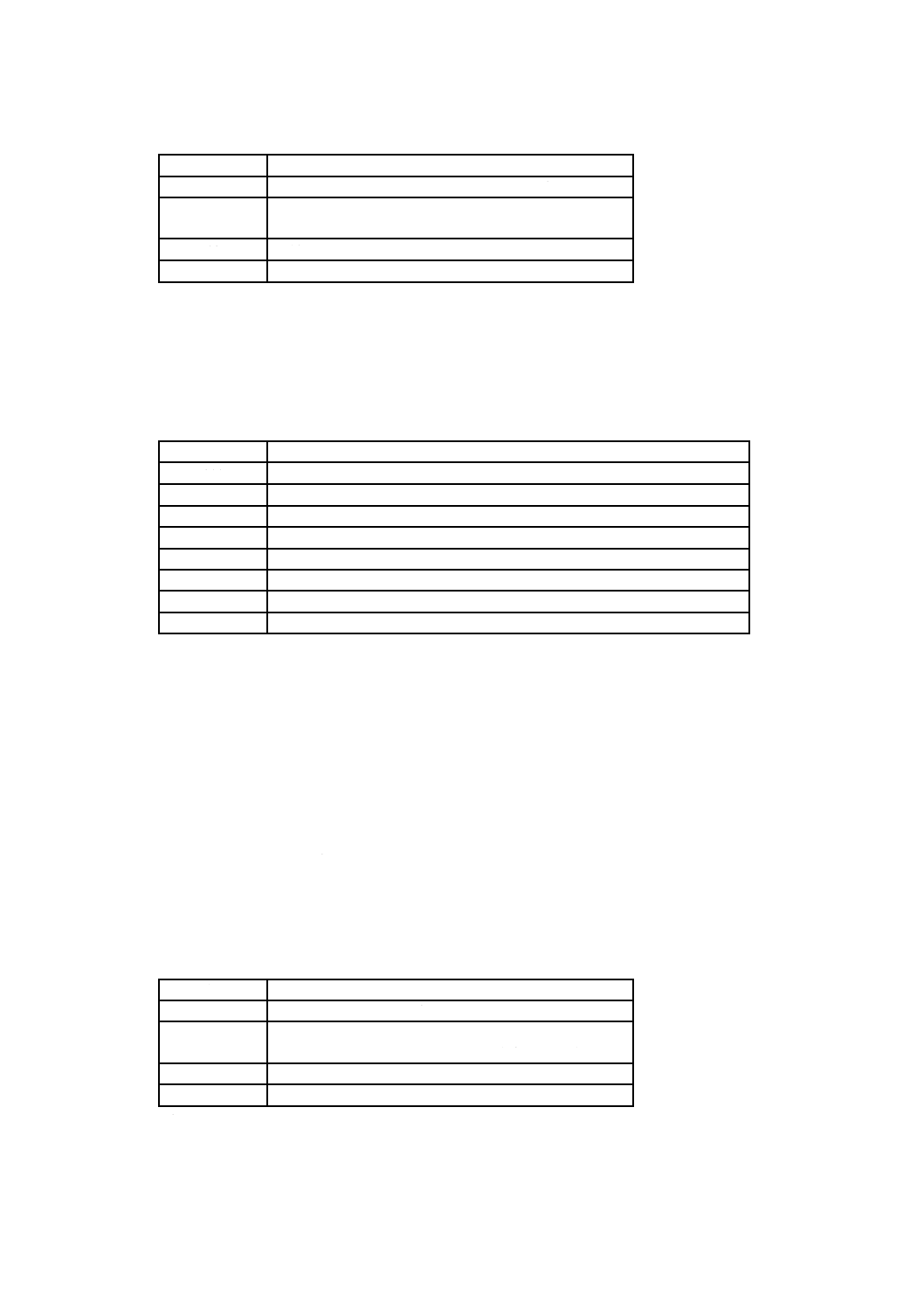
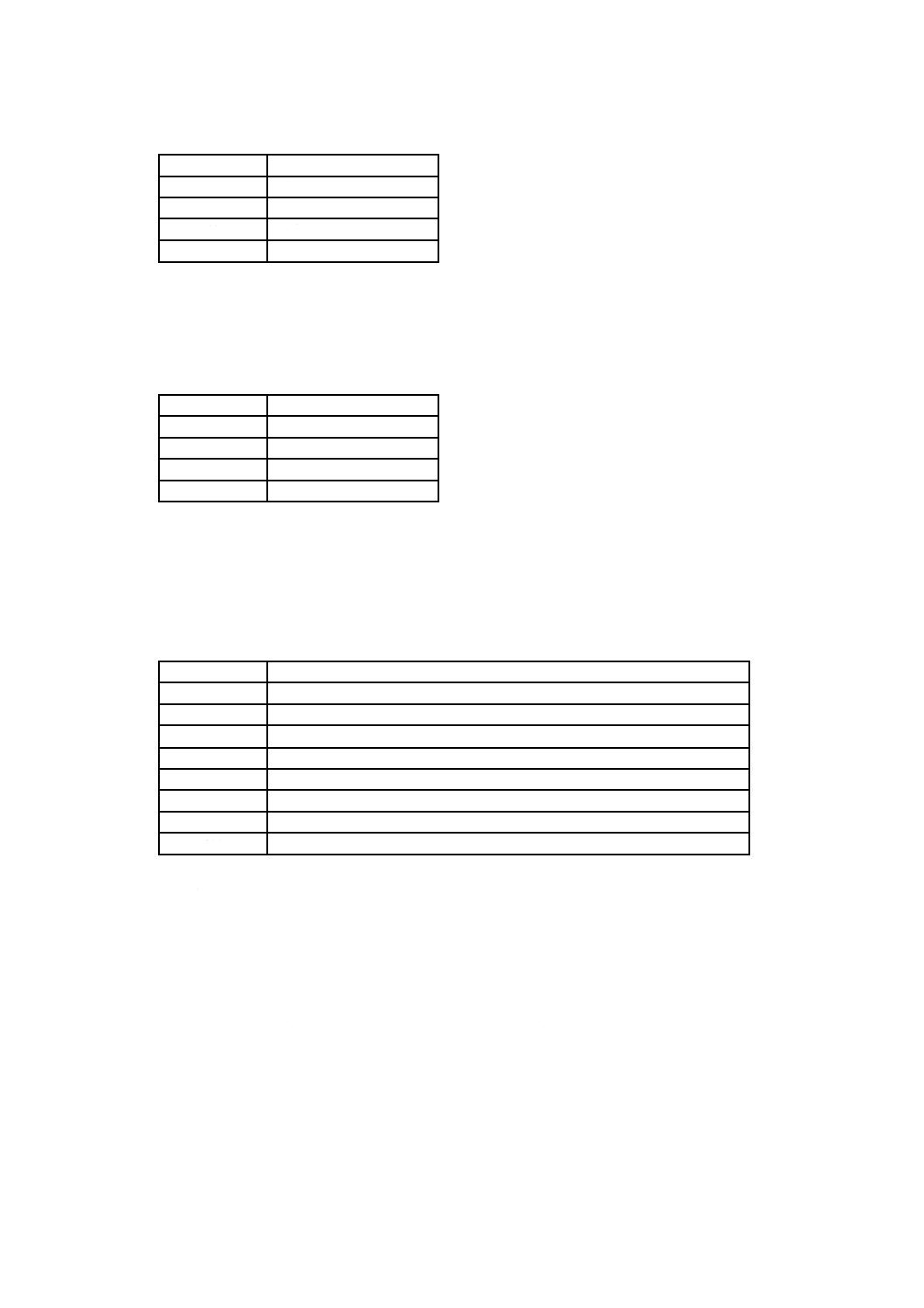
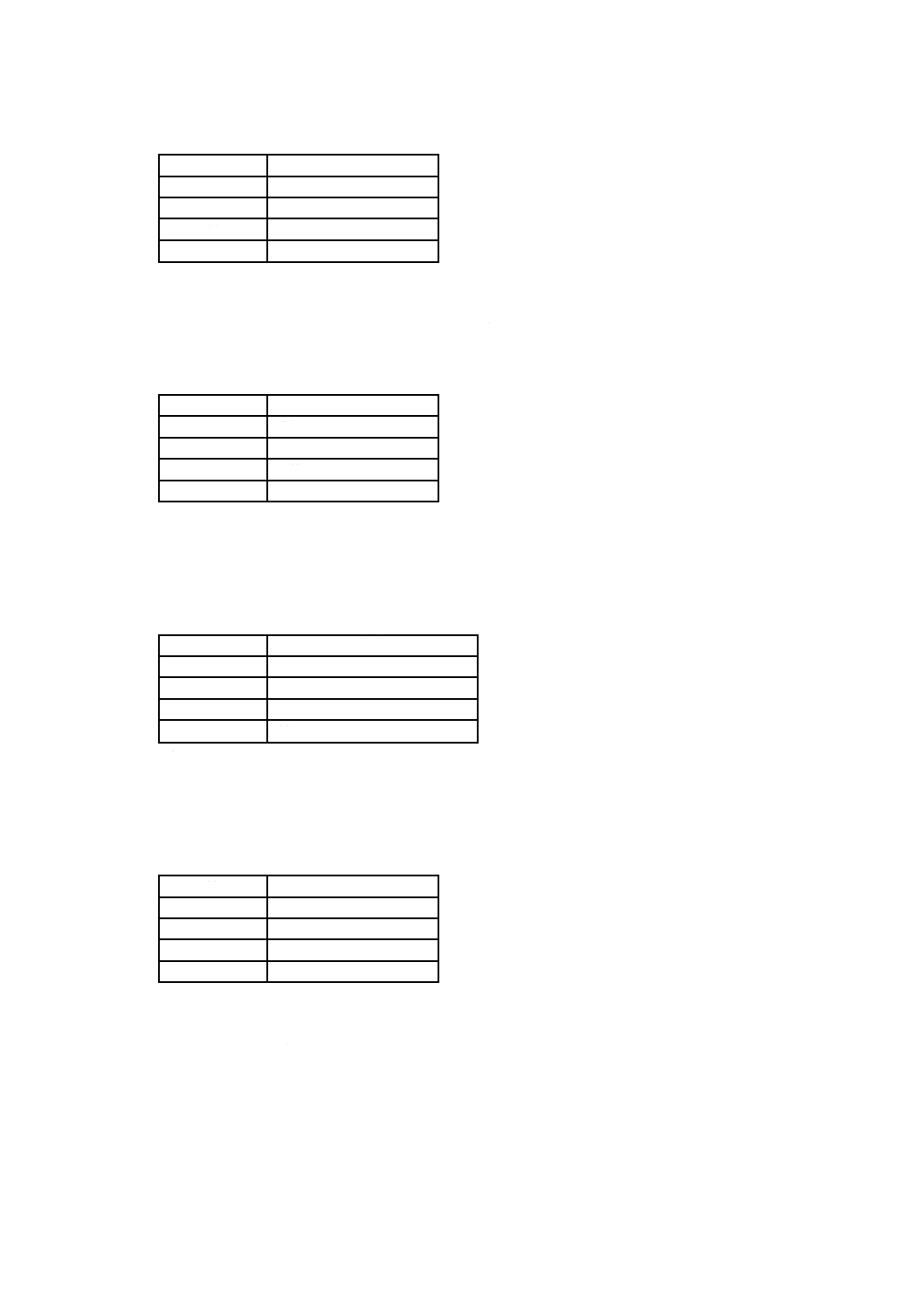
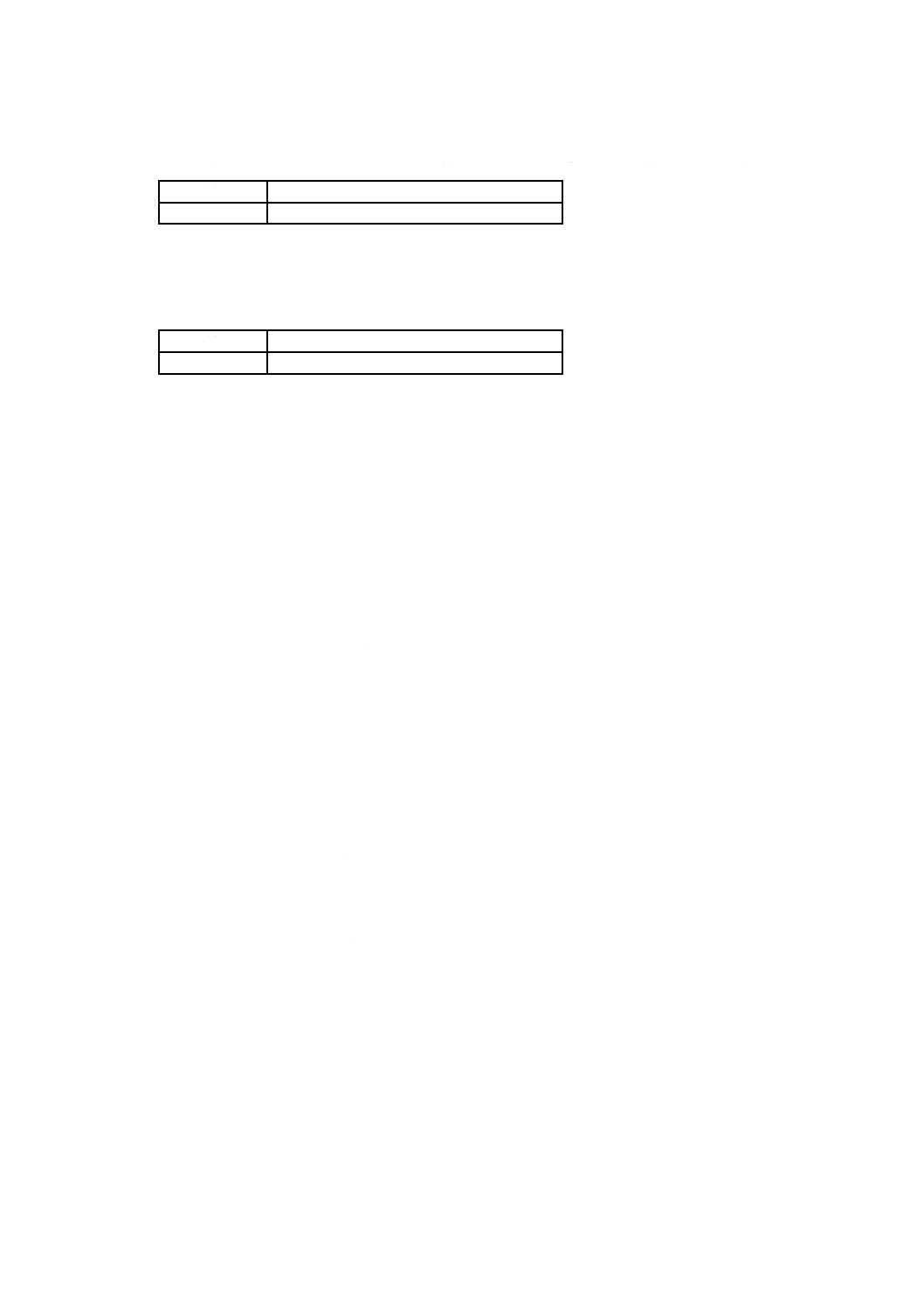
ローカル時間決定にローカル時間オフセットの値を使用するために,時間及び年月日のパラメータは
UTCにしなければならない。ローカル時間オフセットの非作動範囲時間及び日付パラメータの説明は,表
A.1による。
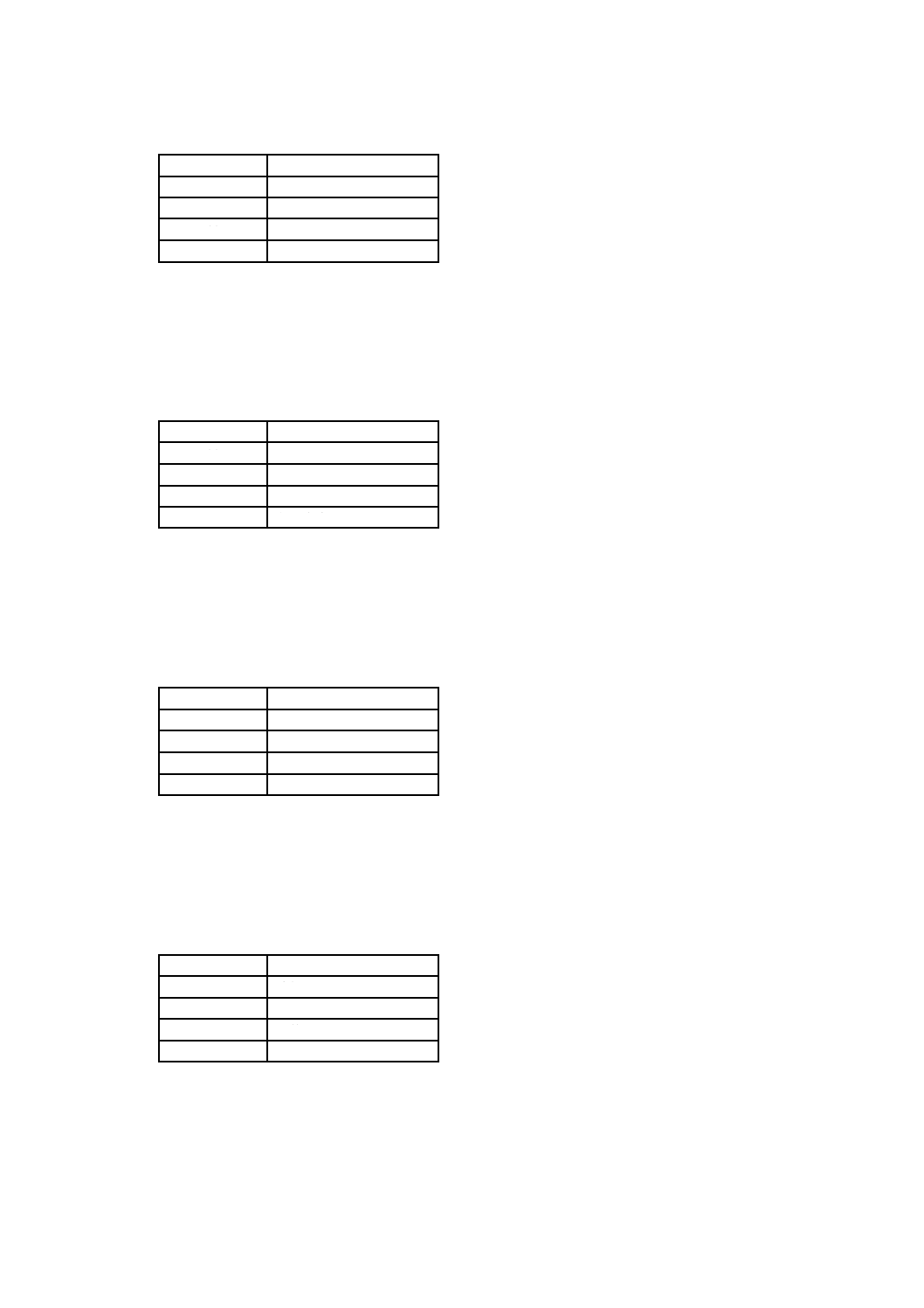
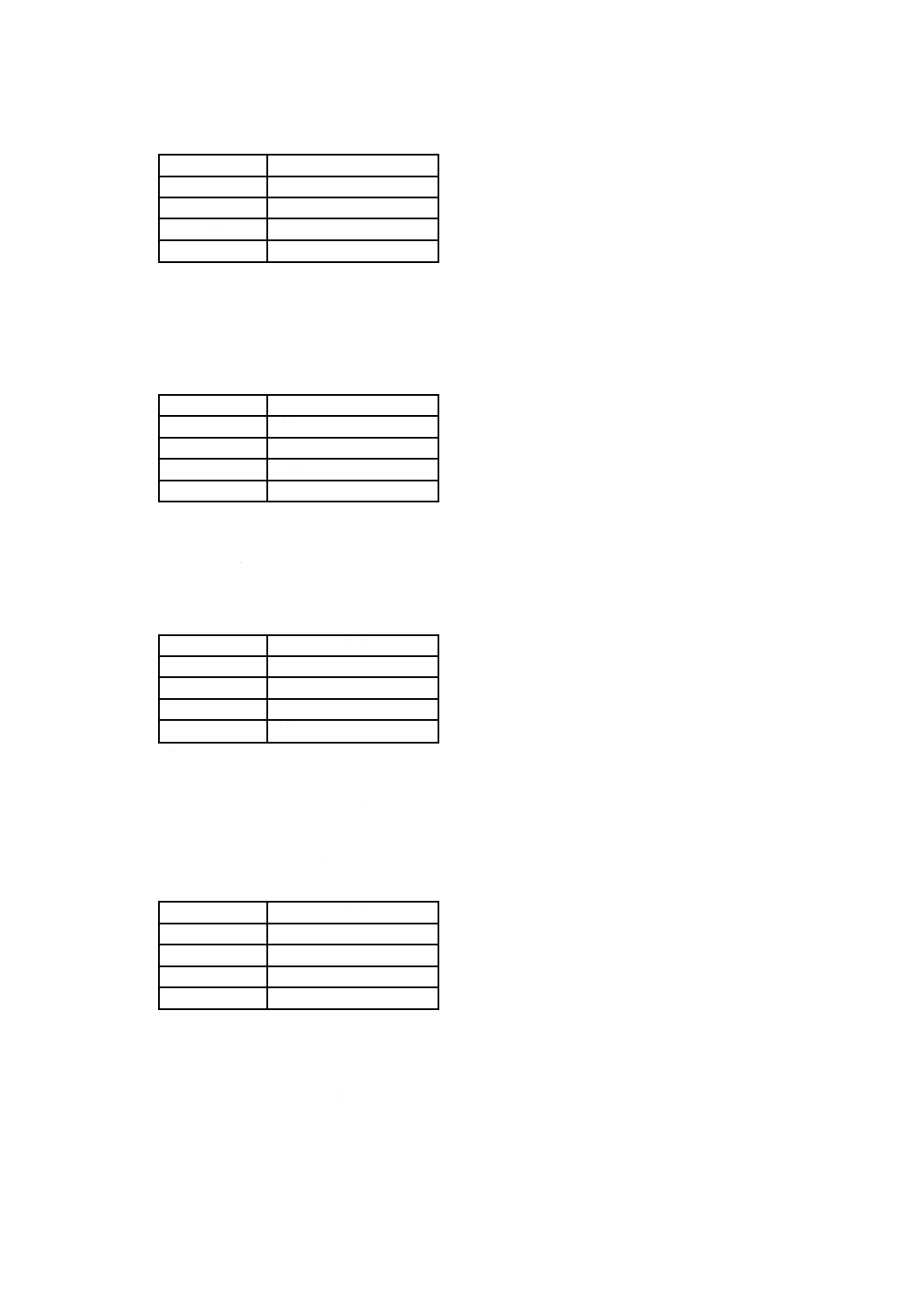
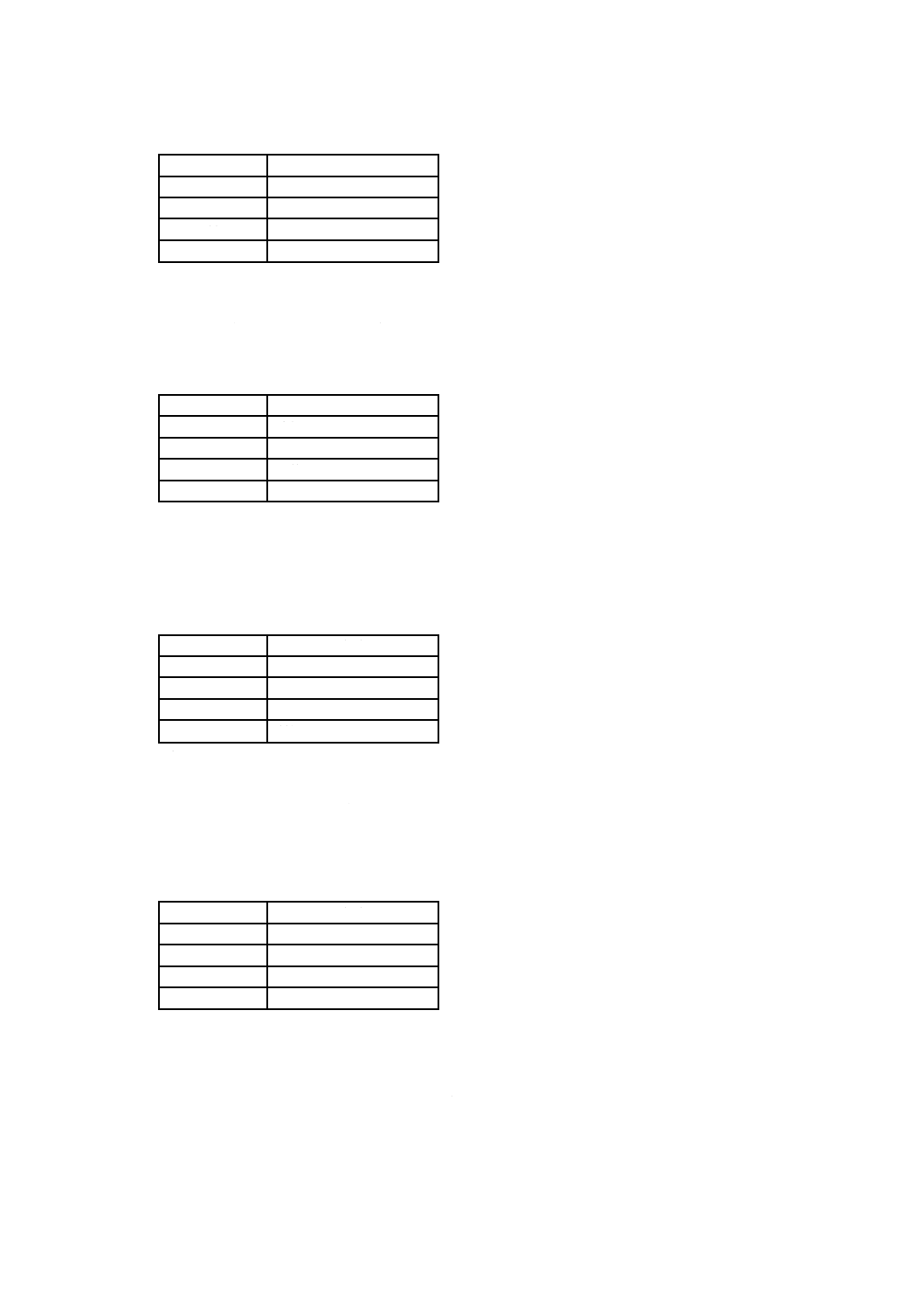
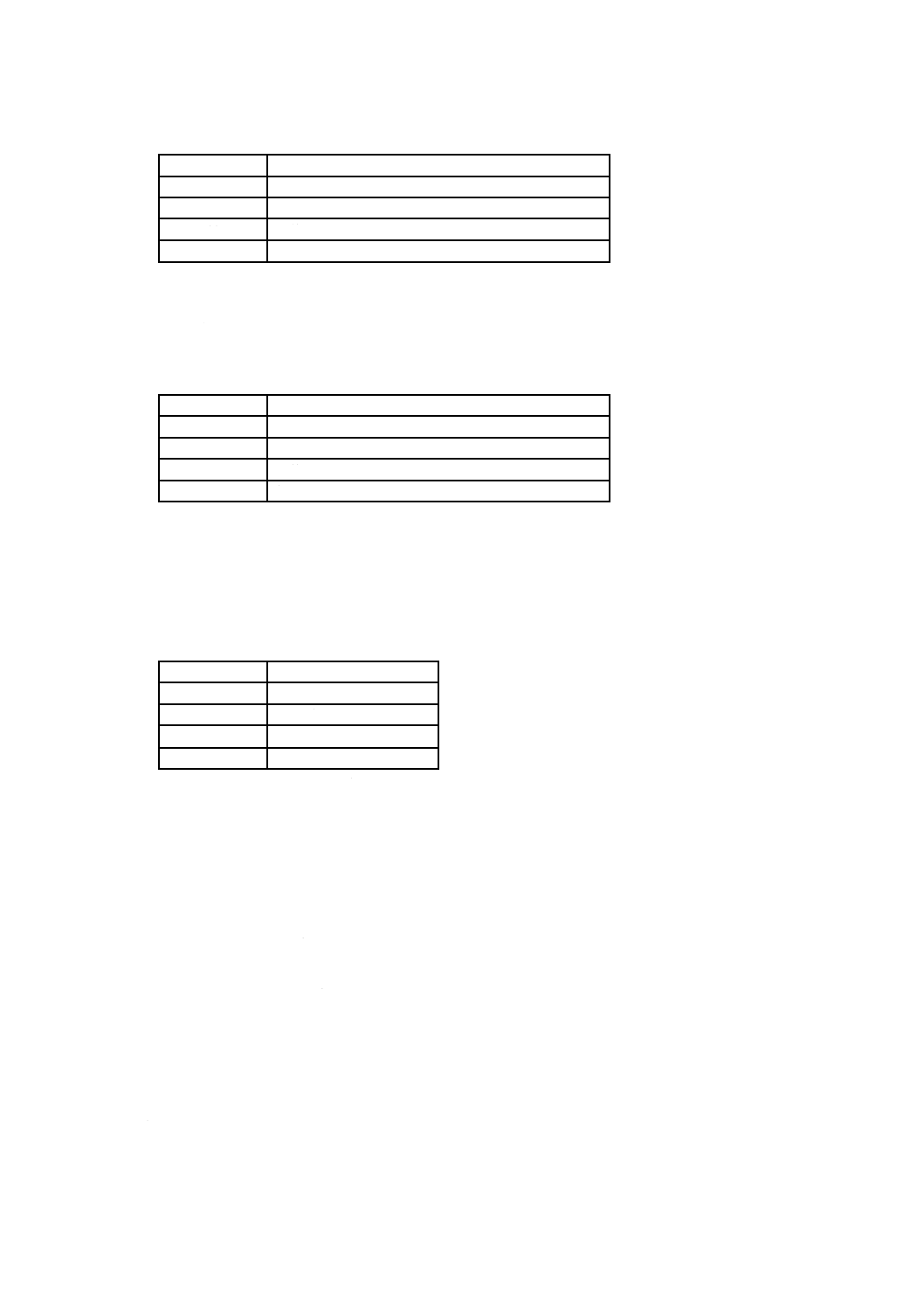
表A.1−ローカル時間オフセットの解釈
ローカル時間
オフセット値
受信パラメータの解釈
時間及び年月日
ローカルオフセット
−125〜−24
(0016〜6516)
時間標準未知
未知
−23〜23
(6616〜9416)
UTC時間及び年月日
ローカル時間オフセット
24〜123
(9516〜F816)
時間標準未知
未知
124
(F916)
UTC時間及び年月日
オフセット規定なし
125
(FA16)
ローカル時間及び年月日
オフセット規定なし
126〜130
(FB16〜FF16)
時間標準未知
未知
A.5 対地車速
レーダなどのセンサで測定された実際の対地車速。
データ長:
2バイト
8
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
分解能:
0.001 m/s/bit,0 m/s オフセット
上位バイト分解能 = 0.256 m/s/bit
データ範囲:
0 m/s〜64.255 m/s
タイプ:
測定値
SPN:
1859
A.6 対地走行距離
レーダなどのセンサで測定された実際の対地走行距離。
走行距離が4 211 081.215 mを超えたとき,値はゼロにリセットし,追加走行距離を加算することが望ま
しい。
データ長:
4バイト
分解能:
0.001 m/bit
データ範囲:
0 m〜4 211 081.215 m
タイプ:
測定値
SPN:
1860
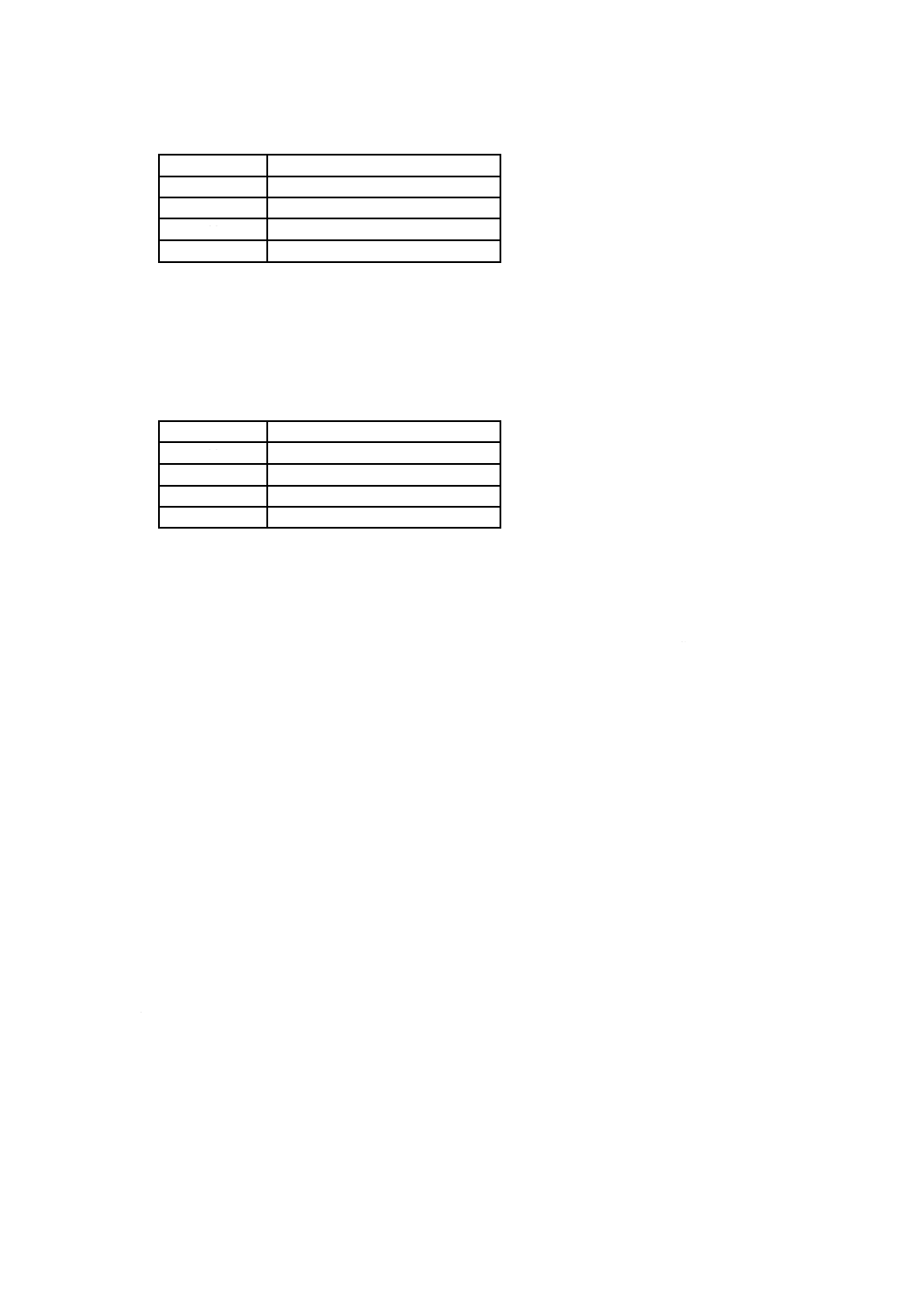
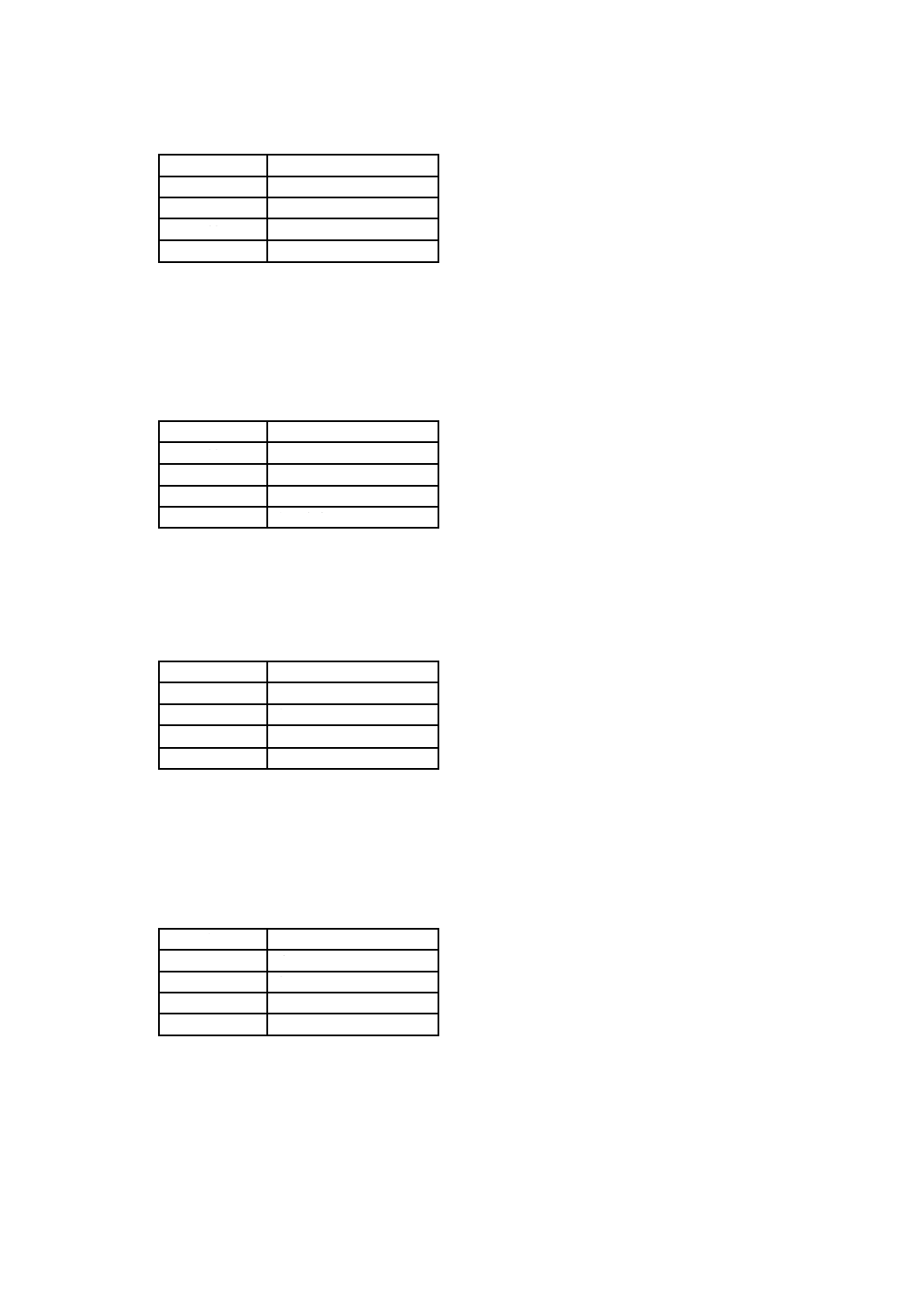
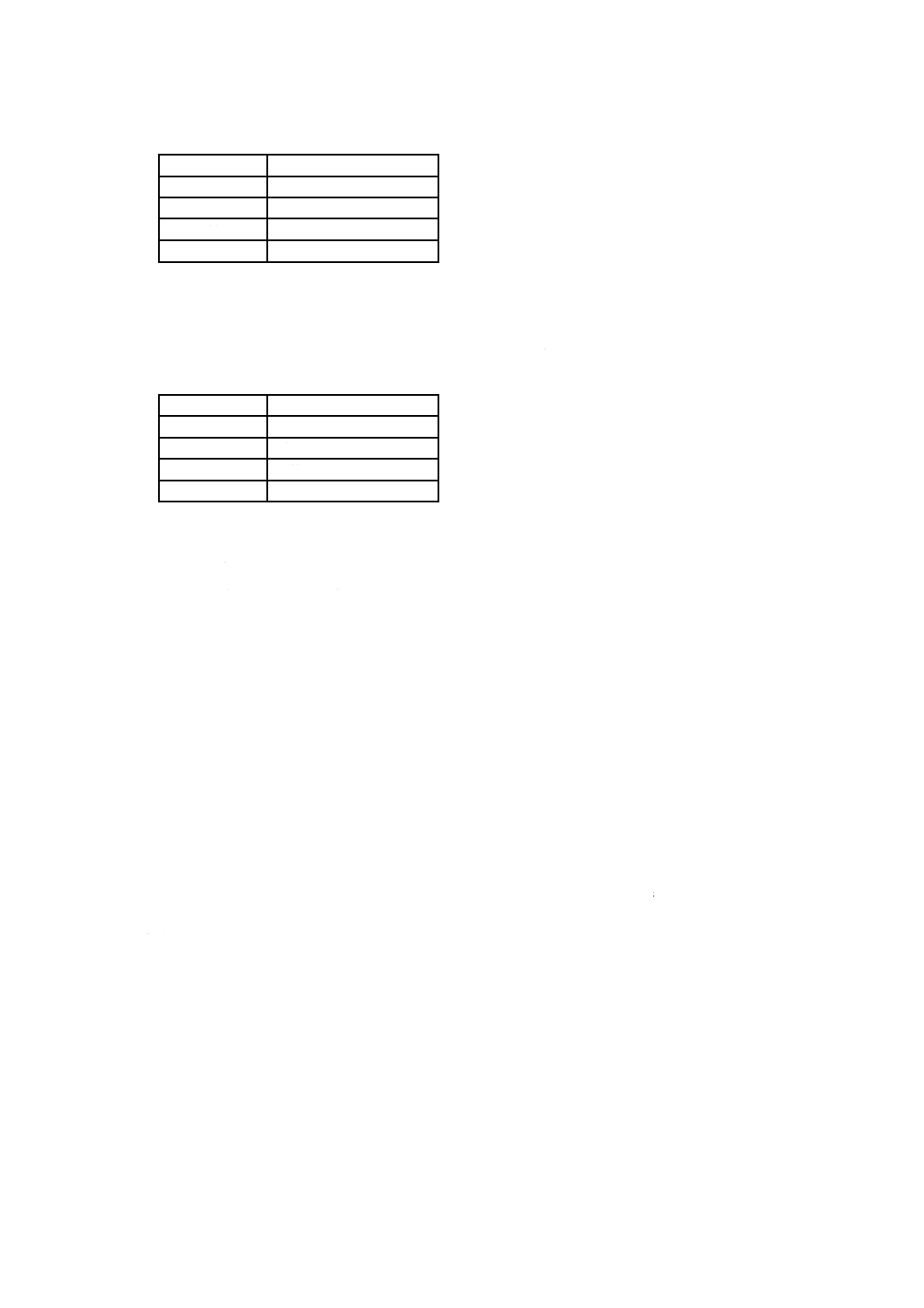
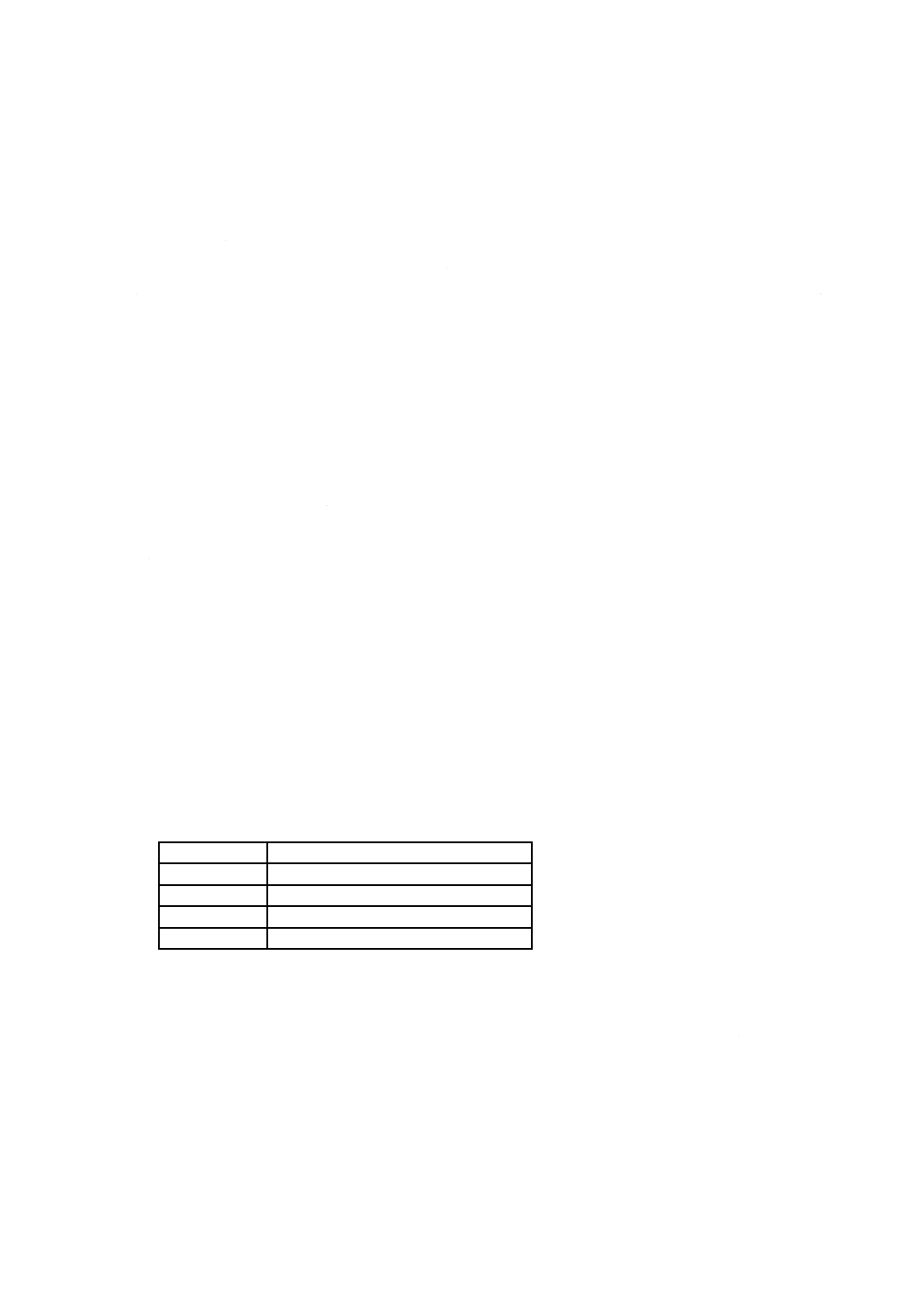
A.7 対地進行方向
走行方向のとおり,前進又は後進のいずれかを示す測定シグナル。
速度がゼロのとき,別方向が検出するまで,直前の進行方向を示す。
注記 前進及び後進は,トラクタ又は作業機シャーシの通常走行方向をいう。その方向は,運転者の
視点が変わっても同じである(すなわち,運転席が反転するとき)。
例 運転席の反転
データ長:
2ビット
値
意味
00
後進
01
前進
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1861
A.8 ホイール基準の車速
測定ホイール又は車軸の回転速度から算出した機械の速度値。
データ長:
2バイト
分解能:
0.001 m/s/bit,0 m/s オフセット
上位バイト分解能 = 0.256 m/s/bit
データ範囲:
0 m/s〜64.255 m/s
タイプ:
測定値
SPN:
1862
9
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.9 ホイール基準の走行距離
測定ホイール又は車軸の回転速度から算出した機械の走行距離。
走行距離が4 211 081.215 mを超えたとき,値はゼロにリセットし,追加走行距離を加算することが望ま
しい。
データ長:
4バイト
分解能:
0.001 m/bit
データ範囲:
0 m〜4 211 081.215 m
タイプ:
測定値
SPN:
1863
A.10 ホイール基準の進行方向
走行方向のとおり,前進又は後進のいずれかを示す測定シグナル。
速度がゼロのとき,別方向が検出するか又は選択され連動するまで,直前の走行方向を示す。
注記 前進及び後進は,トラクタ又は作業機シャーシの通常走行方向をいう。その方向は,運転者の
視点が変わっても同じである(すなわち,運転席が反転するとき)。
例 運転席の反転
データ長:
2ビット
値
意味
00
後進
01
前進
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1864
A.11 キースイッチの状態
トラクタ又は電源装置のキースイッチの状態を示す。
これはエンジン始動時などでの不測の停電は示さない。
データ長:
2ビット
値
意味
00
キースイッチオフ
01
キースイッチオフでない
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1865
A.12 トラクタ電源の最大時間
現在の負荷でトラクタ又は電源装置供給の電力最大残存時間。
このパラメータは,測定値だけでなく推定値でもよい。
データ長:
1バイト
10
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
分解能:
1 min/bit,0 オフセット
データ範囲:
0〜250
タイプ:
測定値
SPN:
1866
A.13 ECUの電源維持
トラクタECUに次の2秒間,主電源ECU̲PWRの電源維持を要求する。
データ長:
2ビット
値
意味
00
ECU̲PWR延長を要求しない。
01
ECU̲PWRの2秒延長を要求
10
予約
11
どちらでもよい。
タイプ:
コマンド
SPN:
1867
A.14 アクチュエータの電源維持
アクチュエータに次の2秒間,PWRの電源維持を要求する。
データ長:
2ビット
値
意味
00
PWR延長を要求しない。
01
PWRの2秒延長を要求
10
予約
11
どちらでもよい。
タイプ:
コマンド
SPN:
1868
A.15 作業機の移動状態
トラクタ又は電源装置に接続した作業機の移動状態を示す。
データ長:
2ビット
値
意味
00
作業機は移動できない。
01
作業機は移動できる。
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1869
A.16 作業機の駐車状態
トラクタ又は電源装置から切り離してよいかどうかの作業機の状態を示す。
11
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
作業機は切り離してはいけない。
01
作業機は切り離しできる。
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1870
A.17 作業機の準備状態
作業機が,トラクタ又は電源装置に接続されて,準備の完了を示す。
データ長:
2ビット
値
意味
00
作業機は作業の準備未完了
01
作業機は作業の準備完了
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1871
A.18 ナビゲーションロケーションパラメータ
ISO 11783規格群によって構築されたネットワークは,IEC 61162-3[NMEA 2000 2)]に規定するナビゲ
ーションロケーションパラメータを使用する。複数のデータフレームを使用する必要があるメッセージは,
JIS B 9225-3に規定するトランスポートプロトコルの代わりに,NMEAの高速パケットプロトコルを使用
する。
注記 ナビゲーション受信機のアンテナは,トラクタ/作業機のナビゲーション受信機ポイントに位
置する。
注2) 2000年にNation Marine Electronics Associationで定められた通信規格である。
A.19 ヒッチパラメータ
A.19.1 フロントヒッチポジション
フロント3点ヒッチの測定ポジションで,パーセントで全作動工程を表す。0 %は最下降ポジション,
100 %は最上昇ポジションを示す。
データ長:
1バイト
分解能:
0.4 %/bit,0 % オフセット
データ範囲:
0 %〜100 %
タイプ:
測定値
SPN:
1872
A.19.2 リヤヒッチポジション
リヤ3点ヒッチの測定ポジションで,パーセントで全作動工程を表す。0 %は最下降ポジション,100 %
は最上昇ポジションを示す。
12
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
1バイト
分解能:
0.4 %/bit,0 % オフセット
データ範囲:
0 %〜100 %
タイプ:
測定値
SPN:
1873
A.19.3 フロントヒッチポジション−コマンド
設定するフロント3点ヒッチポジションを許可するコマンドで,パーセントで全作動工程を表す。0 %
は最下降ポジション,100 %は最上昇ポジションを示す。
データ長:
1バイト
分解能:
0.4 %/bit,0 % オフセット
データ範囲:
0 %〜100 %
タイプ:
コマンド
SPN:
1874
A.19.4 リヤヒッチポジション−コマンド
設定するリヤ3点ヒッチポジションを許可するコマンドで,パーセントで全作動工程を表す。0 %は最
下降ポジション,100 %は最上昇ポジションを示す。
データ長:
1バイト
分解能:
0.4 %/bit,0 % オフセット
データ範囲:
0 %〜100 %
タイプ:
コマンド
SPN:
1875
A.19.5 フロントヒッチの作業中表示
フロントヒッチポジションが,可変スイッチングしきい値を下回る(作業中)か又は超える(作業外)
かを表示する測定シグナル。
スイッチングしきい値を決める方法は,標準化されておらず製造業者が決定する。
データ長:
2ビット
値
意味
00
ヒッチのポジションは作業外
01
ヒッチのポジションは作業中
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1876
A.19.6 リヤヒッチの作業中表示
リヤヒッチポジションが,可変スイッチングしきい値を下回る(作業中)か,又は超える(作業外)か
を表示する測定シグナル。
スイッチングしきい値を決める方法は,標準化されておらず製造業者が決定する。
13
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
ヒッチのポジションは作業外
01
ヒッチのポジションは作業中
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1877
A.19.7 フロントドラフト
作業機からフロントヒッチに作用する見掛けの水平力。
正の値は,トラクタ進行方向とは逆に力が加えられたことを示す。
データ長:
2バイト
分解能:
10 N/bit,−320 000 Nオフセット
データ範囲:
−320 000 N〜322 550 N
タイプ:
測定値
SPN:
1878
A.19.8 リヤドラフト
作業機からリヤヒッチに作用する見掛けの水平力。
正の値は,トラクタ進行方向とは逆に力が加えられたことを示す。
データ長:
2バイト
分解能:
10 N/bit,−320 000 Nオフセット
データ範囲:
−320 000 N〜322 550 N
タイプ:
測定値
SPN:
1879
A.19.9 公称フロントロワーリンク力
フロント3点ヒッチのロワーリンクでドラフトの表示を提供する測定。
見掛けロワーリンク力は,ドラフトに関してほぼ線形であることが予想され,それぞれのヒッチポジシ
ョンでドラフトに比例する。この測定は,通常,ロワーヒッチリンクの荷重変換器から得られ,一般的に
ドラフト制御の基データとして使用する。正の値は,トラクタ進行方向とは逆に力が加えられたことを示
す。
データ長:
1バイト
分解能:
0.8 %/bit,−100 % オフセット
データ範囲:
−100 %〜100 %
タイプ:
測定値
SPN:
1880
A.19.10 公称リヤロワーリンク力
リヤ3点ヒッチのロワーリンクでドラフトの表示を提供する測定。
見掛けロワーリンク力は,ドラフトに関してほぼ線形であることが予想され,それぞれのヒッチポジシ
ョンでドラフトに比例する。この測定は,通常,ロワーヒッチリンクの荷重変換器から得られ,一般的に
ドラフト制御の基データとして使用する。正の値は,トラクタ進行方向とは逆に力が加えられたことを示
14
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
す。
データ長:
1バイト
分解能:
0.8 %/bit,−100 % オフセット
データ範囲:
−100 %〜100 %
タイプ:
測定値
SPN:
1881
A.19.11 フロントヒッチ制限ポジションのステータス
連続的なコマンドのパラメータに関連付けられる,トラクタECUの現時点の制限状態を伝えるために使
用するパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値の010及び011)は,設定
値に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバ
シュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定で
きる。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5150
A.19.12 リヤヒッチ制限ポジションのステータス
持続的であるリヤヒッチポジションコマンドに関連付けて,トラクタECUの現時点での制限状態を伝え
るパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
15
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5151
A.20 PTOパラメータ
A.20.1 フロントPTO出力軸の回転速度
フロントPTO出力軸の測定回転速度。
クラッチ接続の前にPTO速度を監視する既存のトラクタとして,PTO速度はPTOが接続したときだけ
有効で解除すると利用できない。
データ長:
2バイト
分解能:
0.125 1/min/bit,0 1/min オフセット
データ範囲:
0 1/min〜8 031.875 1/min
タイプ:
測定値
SPN:
1882
A.20.2 リヤPTO出力軸の回転速度
リヤPTO出力軸の測定回転速度。
クラッチ接続の前にPTO速度を監視する既存のトラクタとして,PTO速度はPTOが接続したときだけ
有効で解除すると利用できない。
データ長:
2バイト
分解能:
0.125 1/min/bit,0 1/min オフセット
データ範囲:
0 1/min〜8 031.875 1/min
タイプ:
測定値
SPN:
1883
A.20.3 フロントPTO出力軸の回転速度設定点
フロントPTO出力軸回転速度の設定点測定値。
データ長:
2バイト
分解能:
0.125 1/min/bit,0 1/min オフセット
データ範囲:
0 1/min〜8 031.875 1/min
タイプ:
測定値
SPN:
1884
A.20.4 リヤPTO出力軸の回転速度設定点
リヤPTO出力軸回転速度の設定点測定値。
データ長:
2バイト
分解能:
0.125 1/min/bit,0 1/min オフセット
16
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ範囲:
0 1/min〜8 031.875 1/min
タイプ:
測定値
SPN:
1885
A.20.5 フロントPTO出力軸の回転速度設定点−コマンド
フロントPTO出力軸回転速度の設定点コマンド。
データ長:
2バイト
分解能:
0.125 1/min/bit,0 1/min オフセット
データ範囲:
0 1/min〜8 031.875 1/min
タイプ:
コマンド
SPN:
1886
A.20.6 リヤPTO出力軸の回転速度設定点−コマンド
リヤPTO出力軸回転速度の設定点コマンド。
データ長:
2バイト
分解能:
0.125 1/min/bit,0 1/min オフセット
データ範囲:
0 1/min〜8 031.875 1/min
タイプ:
コマンド
SPN:
1887
A.20.7 フロントPTO入切
フロントPTOが,“入”か又は“切”かを示す測定シグナル。
データ長:
2ビット
値
意味
00
PTO切
01
PTO入
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1888
A.20.8 リヤPTO入切
リヤPTOが,“入”か又は“切”かを示す測定シグナル。
データ長:
2ビット
値
意味
00
PTO切
01
PTO入
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
2408
A.20.9 フロントPTOモード
フロントPTOモードが,540 r/minか又は1 000 r/minかを示す測定シグナル。
17
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
PTOモード540 r/min
01
PTOモード1 000 r/min
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1889
A.20.10 リヤPTOモード
リヤPTOモードが,540 r/minか又は1 000 r/minかを示す測定シグナル。
データ長:
2ビット
値
意味
00
PTOモード540 r/min
01
PTOモード1 000 r/min
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1890
A.20.11 フロントPTOエコノミーモード
フロントPTOエコノミーモードが,“入”か又は“切”かを示す測定シグナル。
エコノミーモードPTOは,エンジン低回転数において540 r/min又は1 000 r/minで運転する。
データ長:
2ビット
値
意味
00
PTOエコノミーモード切
01
PTOエコノミーモード入
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1891
A.20.12 リヤPTOエコノミーモード
リヤPTOエコノミーモードが,“入”か又は“切”かを示す測定シグナル。
エコノミーモードPTOは,エンジン低回転数において540 r/min又は1 000 r/minで運転する。
データ長:
2ビット
値
意味
00
PTOエコノミーモード切
01
PTOエコノミーモード入
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1892
A.20.13 フロントPTO入切−コマンド
フロントPTOの“入”か又は“切”コマンド。
18
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
PTO切にせよ。
01
PTO入にせよ。
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
1893
A.20.14 リヤPTO入切−コマンド
リヤPTOの“入”か又は“切”コマンド。
データ長:
2ビット
値
意味
00
PTO切にせよ。
01
PTO入にせよ。
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
1894
A.20.15 フロントPTO モード−コマンド
フロントPTOのモード選択コマンド。
データ長:
2ビット
値
意味
00
540 r/minモードを選択せよ。
01
1 000 r/minモードを選択せよ。
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
1895
A.20.16 リヤPTOモード−コマンド
リヤPTOのモード選択コマンド。
データ長:
2ビット
値
意味
00
540 r/minモードを選択せよ。
01
1 000 r/minモードを選択せよ。
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
1896
A.20.17 フロントPTOエコノミーモード−コマンド
フロントPTOエコノミーモード入切のコマンド。
19
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
PTOエコノミーモード切にせよ。
01
PTOエコノミーモード入にせよ。
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
1897
A.20.18 リヤPTOエコノミーモード−コマンド
リヤPTOエコノミーモード入切のコマンド。
データ長:
2ビット
値
意味
00
PTOエコノミーモード切にせよ。
01
PTOエコノミーモード入にせよ。
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
1898
A.20.19 フロントPTOの接続要求ステータス
過渡的/一時的/単発のフロントPTO接続要求に関連したトラクタECUの状態を報告するパラメータ。
データ長:
2ビット
値
意味
00
外部要求受付済み。受付後のオペレータの介入なし。
01
制御オーバライド(最新の外部要求は,オペレータ又は
トラクタシステムのオーバライドで無視された。)
10
エラー
11
利用不可(パラメータサポートなし)
タイプ:
測定
SPN:
5152
A.20.20 フロントPTOのモード要求ステータス
過渡的/一時的/単発のフロントPTOモード要求に関連したトラクタECUの状態を報告するパラメー
タ。
データ長:
2ビット
値
意味
00
外部要求受付済み。受付後のオペレータの介入なし。
01
制御オーバライド(最新の外部要求は,オペレータ又は
トラクタシステムのオーバライドで無視された。)
10
エラー
11
利用不可(パラメータサポートなし)
タイプ:
測定
SPN:
5153
A.20.21 フロントPTOのエコノミーモード要求ステータス
過渡的/一時的/単発のフロントPTOエコノミーモード要求に関連したトラクタECUの状態を報告す
るパラメータ。
20
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
外部要求受付済み。受付後のオペレータの介入なし。
01
制御オーバライド(最新の外部要求は,オペレータ又は
トラクタシステムのオーバライドで無視された。)
10
エラー
11
利用不可(パラメータサポートなし)
タイプ:
測定
SPN:
5154
A.20.22 フロントPTO軸回転速度の制限ステータス
持続的であるフロントPTO軸速度のコマンドと関連した,トラクタECUの現時点での制限状態を伝え
るパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5155
A.20.23 リヤPTOの接続要求ステータス
過渡的/一時的/単発のリヤPTO接続要求に関連したトラクタECUの状態を報告するパラメータ。
データ長:
2ビット
値
意味
00
受付後のオペレータの介入なし
01
制御オーバライド(最新の外部要求は,オペレータ又は
トラクタシステムのオーバライドで無視された。)
10
エラー
11
利用不可(パラメータサポートなし)
タイプ:
測定
SPN:
5156
21
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.20.24 リヤPTOのモード要求ステータス
過渡的/一時的/単発のリヤPTOモード要求に関連したトラクタECUの状態を報告するパラメータ。
データ長:
2ビット
値
意味
00
外部要求受付済み。受付後のオペレータの介入なし。
01
制御オーバライド(最新の外部要求は,オペレータ又は
トラクタシステムのオーバライドで無視された。)
10
エラー
11
利用不可(パラメータサポートなし)
タイプ:
測定
SPN:
5157
A.20.25 リヤPTOのエコノミーモード要求ステータス
過渡的/一時的/単発のリヤPTOエコノミーモード要求に関連したトラクタECUの状態を報告するパ
ラメータ。
データ長:
2ビット
値
意味
00
外部要求受付済み。受付後のオペレータの介入なし。
01
制御オーバライド(最新の外部要求は,オペレータ又は
トラクタシステムのオーバライドで無視された。)
10
エラー
11
利用不可(パラメータサポートなし)
タイプ:
測定
SPN:
5158
A.20.26 リヤPTO軸回転速度の制限ステータス
持続的であるリヤPTO軸回転速度のコマンドと関連した,トラクタECUの現時点での制限状態を伝え
るパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
22
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
変化させることができる。
タイプ:
測定値
SPN:
5159
A.21 補助バルブパラメータ
A.21.1 補助バルブ番号
補助油圧バルブには,0から最大数まで順番に番号を付与する。トラクタの補助バルブは,これら補助
バルブ番号に対応するバルブ番号を貼り付けられなければならない。補助バルブメッセージがブロードキ
ャストする接続システムにおいて,送信されたバルブ番号は,作業機又は機器が接続された補助バルブの
番号ラベルに対応していなければならない。補助バルブ番号は,補助バルブの場所又は取付けのいずれも
示さない。
“パワービヨンド(油圧ループ回路)”技術を使用のシステムでは,バルブ番号0は,“パワービヨンド”
制御バルブの識別に使用しなければならない。
A.21.2 補助バルブ番号0の伸びポート測定流量
トラクタ補助バルブ番号0の伸びポートを通過する測定流量で,全流量に対する比率で表示する。
ゼロパーセントは全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,トラクタ
に戻る最大流量を示す。
データ長:
1バイト
分解能:
1 %/bit,−125 % オフセット
データ範囲:
−125 %〜125 %
タイプ:
測定値
SPN:
1899
A.21.3 補助バルブ番号0の縮みポート測定流量
全流量比率として表示するトラクタ補助バルブ番号0の縮みポートを通過する測定流量。
ゼロパーセントは全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,トラクタ
に戻る最大流量を示す。
データ長:
1バイト
分解能:
1 %/bit,−125 % オフセット
データ範囲:
−125 %〜125 %
タイプ:
測定値
SPN:
1900
A.21.4 補助バルブ番号0の伸びポート推定流量
バルブの指令位置に基づくことができる,トラクタ補助バルブ0の伸びポートを通る流量コントローラ
によって報告する値。
ゼロパーセントは全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,トラクタ
に戻る最大流量を示す。このパラメータは,推定値であり測定値ではないため,フィードバック制御シス
テムで使用する場合は注意が必要である。
データ長:
1バイト
分解能:
1 %/bit,−125 % オフセット
データ範囲:
−125 %〜125 %
23
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
タイプ:
推定値
SPN:
1901
A.21.5 補助バルブ番号0の縮みポート推定流量
バルブの指令位置に基づくことができる,トラクタ補助バルブ0の縮みポートを通る流量コントローラ
によって報告する値。
ゼロパーセントは全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,トラクタ
に戻る最大流量を示す。このパラメータは,推定値であり測定値ではないため,フィードバック制御シス
テムで使用する場合は注意が必要である。
データ長:
1バイト
分解能:
1 %/bit,−125 % オフセット
データ範囲:
−125 %〜125 %
タイプ:
推定値
SPN:
1902
A.21.6 補助バルブ番号0のバルブ状態
補助バルブ番号0の測定状態。
ブロック状態は,バルブが閉じていて,バルブからの又はバルブへの流れはなく,作動油は圧力下でも
よいことを意味する。フローティング状態は,バルブからの又はバルブへの制御された流れはなく,バル
ブポートは作動油タンクに直接接続されていることを意味する。これは作動油が,アクチュエータの作動
でバルブへ又はバルブから流れてもよいことを意味する。伸び状態は,流量がバルブの伸びポートで制御
されて縮みポートへ戻ることを意味する。縮み状態は,流量がバルブの縮みポートで制御されて伸びポー
トへ戻ることを意味する。
データ長:
4ビット
値
意味
0000
ブロック
0001
伸び
0010
縮み
0011
フロート
0100〜1101
予約
1110
エラー表示
1111
利用不可
タイプ:
測定値
SPN:
1903
A.21.7 補助バルブ番号0の伸びポート圧力
トラクタ補助バルブ番号0の伸びポートで測定した呼び圧力。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
1904
A.21.8 補助バルブ番号0の縮みポート圧力
トラクタ補助バルブ番号0の縮みポートで測定した呼び圧力。
24
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
1905
A.21.9 補助バルブ番号0のリターンポート圧力
トラクタ補助バルブ番号0のリターンポートで測定した呼び圧力。
データ長:
1バイト
分解能:
16 kPa/bit,オフセット0
データ範囲:
0 kPa〜4 000 kPa
タイプ:
測定値
SPN:
1906
A.21.10 補助バルブ番号0のポート流量−コマンド
トラクタ補助バルブ番号0の伸び又は縮みポートを通る流量設定のコマンド。0 %は全く流量がないこ
とを,100 %は最大流で,全流量に対する比率で表示する。
流れは,反対側のポートを通じてトラクタに戻る。
データ長:
1バイト
分解能:
0.4 %/bit,0 %オフセット
データ範囲:
0 %〜100 %
タイプ:
コマンド
SPN:
1907
A.21.11 補助バルブ番号0の状態−コマンド
補助バルブ番号0の状態を設定するコマンド。
フローティング状態のとき,作業機を動かすことによって,作動油がトラクタへ又はトラクタから流れ
てもよい。
データ長:
4ビット
値
意味
0000
ブロック
0001
伸び
0010
縮み
0011
フロート
0100〜1110
予約
1111
ドントケア
タイプ:
コマンド
SPN:
1908
A.21.12 補助バルブ番号0のフェールセーフモード−コマンド
補助バルブ番号0のフェールセーフモードを設定するコマンド。
25
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
ブロック
01
フロート
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
1909
A.21.13 補助バルブ番号0のフェールセーフモード
補助バルブ番号0のフェールセーフモードの測定状態。
データ長:
2ビット
値
意味
00
ブロック
01
フロート
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
1910
A.21.14 補助バルブ番号0の測定流量制限ステータス
持続的であるバルブ番号0の流量コマンドと関連し,トラクタECUの現時点で測定された流量制限状態
を伝えるパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5160
A.21.15 補助バルブ番号0の推定流量制限ステータス
持続的であるバルブ番号0の流量コマンドと関連し,トラクタECUの現時点で推定された流量制限状態
26
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を伝えるパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5161
A.21.16 補助バルブ番号1〜14のパラメータ
この規格は,補助バルブ番号0及び15のパラメータだけを規定する。ただし,バルブ番号1〜14のデー
タ構造はバルブ番号15と同一とする。データもまたバルブ番号を除いて同一とする。
A.21.17 補助バルブ番号15の伸びポート測定流量
トラクタ補助バルブ番号15の伸びポートを通過する測定流量で,全流量に対する比率で表示する。
0 %は全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,トラクタに戻る最大
流量を示す。
データ長:
1バイト
分解能:
1 %/bit,−125 %オフセット
データ範囲:
−125 %〜125 %
タイプ:
測定値
SPN:
2335
A.21.18 補助バルブ番号15の縮みポート測定流量
トラクタ補助バルブ番号15の縮みポートを通過する測定流量で,全流量に対する比率で表示する。
0 %は全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,トラクタに戻る最大
流量を示す。
データ長:
1バイト
分解能:
1 %/bit,−125 %オフセット
データ範囲:
−125 %〜125 %
タイプ:
測定値
27
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
SPN:
2336
A.21.19 補助バルブ番号15の伸びポート推定流量
流量コントローラによって報告する,トラクタ補助バルブ番号15の伸びポートを通過する推定流量の値
で,コマンドされたバルブのポジションに基づく場合もある。
0 %は全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,トラクタに戻る最大
流量を示す。このパラメータは,推定値であり,測定値ではないため,フィードバック制御システムで使
用する場合は注意が必要である。
データ長:
1バイト
分解能:
1 %/bit,−125 %オフセット
データ範囲:
−125 %〜125 %
タイプ:
推定値
SPN:
2337
A.21.20 補助バルブ番号15の縮みポート推定流量
流量コントローラによって報告する,トラクタ補助バルブ番号15の縮みポートを通過する推定流量の値
で,コマンドされたバルブのポジションに基づく場合もある。
0 %は全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,トラクタに戻る最大
流量を示す。このパラメータは,推定値であり,測定値ではないため,フィードバック制御システムで使
用する場合は注意が必要である。
データ長:
1バイト
分解能:
1 %/bit,−125 %オフセット
データ範囲:
−125 %〜125 %
タイプ:
推定値
SPN:
2338
A.21.21 補助バルブ番号15のバルブ状態
補助バルブ番号15の測定状態。
ブロック状態は,バルブが閉じていてバルブからの又はバルブへの流れはなく,作動油は圧力をかけら
れていることを意味する。フローティング状態は,バルブからの又はバルブへの制御された流れはなく,
バルブポートは作動油タンクに直接接続されていることを意味する。これは作動油が,アクチュエータの
作動でバルブへ又はバルブから流れてもよいことを意味する。伸び状態は,流量がバルブの伸びポートで
制御されて縮みポートへ戻ることを意味する。縮み状態は,流量がバルブの縮みポートで制御されて伸び
ポートへ戻ることを意味する。
データ長:
4ビット
値
意味
0000
ブロック
0001
伸び
0010
縮み
0011
フロート
0100〜1101
予約
1110
エラー表示
1111
利用不可
タイプ:
測定値
28
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
SPN:
2339
A.21.22 補助バルブ番号15の伸びポート圧力
トラクタ補助バルブ番号15の伸びポートで測定した呼び圧力。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
2340
A.21.23 補助バルブ番号15の縮みポート圧力
トラクタ補助バルブ番号15の縮みポートで測定した呼び圧力。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
2341
A.21.24 補助バルブ番号15のリターンポート圧力
トラクタ補助バルブ番号15のリターンポートで測定した呼び圧力。
データ長:
1バイト
分解能:
16 kPa/bit,オフセット0
データ範囲:
0 kPa〜4 000 kPa
タイプ:
測定値
SPN:
2342
A.21.25 補助バルブ番号15のポート流量−コマンド
トラクタ補助バルブ番号15の伸び又は縮みポートを通る流量設定のコマンドで,全流量に対する比率で
表示する。
0 %は全く流量がないことを,100 %は最大流量を示す。流れは反対側のポートを通じてトラクタに戻る。
データ長:
1バイト
分解能:
0.4 %/bit,0 %オフセット
データ範囲:
0 %〜100 %
タイプ:
コマンド
SPN:
2343
A.21.26 補助バルブ番号15の状態−コマンド
補助バルブ番号15の状態を設定するコマンド。
フローティング状態のとき,作業機を動かすことによって,作動油がトラクタへ又はトラクタから流れ
てもよい。
29
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
4ビット
値
意味
0000
ブロック
0001
伸び
0010
縮み
0011
フロート
0100〜1101
予約
1111
ドントケア
タイプ:
コマンド
SPN:
2344
A.21.27 補助バルブ番号15のフェールセーフモード−コマンド
補助バルブ番号15のフェールセーフモードを設定するコマンド。
データ長:
2ビット
値
意味
00
ブロック
01
フロート
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2345
A.21.28 補助バルブ番号15のフェールセーフモード
補助バルブ番号15のフェールセーフモードの測定状態。
データ長:
2ビット
値
意味
00
ブロック
01
フロート
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
2346
A.21.29 補助バルブ番号15の測定流量制限ステータス
持続的であるバルブ番号15の流量コマンドと関連し,トラクタECUの現時点で測定された流量制限状
態を伝えるパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
30
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5190
A.21.30 補助バルブ番号15の推定流量制限ステータス
持続的であるバルブ番号15の流量コマンドと関連し,トラクタECUの現時点で推定された流量制限状
態を伝えるパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5191
A.21.31 汎用バルブ伸びポートの測定流量
汎用バルブの伸びポートを通過する測定流量で,全流量に対する比率で表示する。
0 %は全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,バルブに戻る最大流
量を示す。
データ長:
1バイト
分解能:
1 %/bit,−125 %オフセット
データ範囲:
−125 %〜125 %
タイプ:
測定値
SPN:
2937
31
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.21.32 汎用バルブ縮みポートの測定流量
汎用バルブの縮みポートを通過する測定流量で,全流量に対する比率で表示する。
0 %は全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,バルブに戻る最大流
量を示す。
データ長:
1バイト
分解能:
1 %/bit,−125 %オフセット
データ範囲:
−125 %〜125 %
タイプ:
測定値
SPN:
2938
A.21.33 汎用バルブ伸びポートの推定流量
流量コントローラによって報告する,汎用バルブの伸びポートを通過する推定流量の値で,コマンドさ
れたバルブのポジションに基づく場合もある。
0 %は全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,バルブに戻る最大流
量を示す。このパラメータは,推定値であり,測定値ではないため,フィードバック制御システムで使用
する場合は注意が必要である。
データ長:
1バイト
分解能:
1 %/bit,−125 %オフセット
データ範囲:
−125 %〜125 %
タイプ:
推定値
SPN:
2939
A.21.34 汎用バルブ縮みポートの推定流量
流量コントローラによって報告する,汎用バルブの縮みポートを通過する推定流量の値で,コマンドさ
れたバルブのポジションに基づく場合もある。
0 %は全く流量がないことを,100 %は最大流量を,−100 %はこのポートを通り,バルブに戻る最大流
量を示す。このパラメータは,推定値であり,測定値ではないため,フィードバック制御システムで使用
する場合は注意が必要である。
データ長:
1バイト
分解能:
1 %/bit,−125 %オフセット
データ範囲:
−125 %〜125 %
タイプ:
推定値
SPN:
2940
A.21.35 汎用バルブの状態
汎用バルブの測定状態。
ブロック状態は,バルブが閉じていて,バルブからの又はバルブへの流れはなく,作動油は圧力下でも
よいことを意味する。フローティング状態は,バルブからの又はバルブへの制御された流れはなく,バル
ブポートは作動油タンクに直接接続されていることを意味する。これは作動油が,アクチュエータの作動
でバルブへ又はバルブから流れてもよいことを意味する。伸び状態は,流量がバルブの伸びポートで制御
されて縮みポートへ戻ることを意味する。縮み状態は,流量がバルブの縮みポートで制御されて伸びポー
トへ戻ることを意味する。
32
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
4ビット
値
意味
0000
ブロック
0001
伸び
0010
縮み
0011
フロート
0100〜1101
予約
1110
エラー表示
1111
利用不可
タイプ:
測定値
SPN:
2932
A.21.36 汎用バルブの伸びポート圧力
汎用バルブの伸びポートで測定した呼び圧力。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
2941
A.21.37 汎用バルブの縮みポート圧力
汎用バルブの縮みポートで測定した呼び圧力。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
2942
A.21.38 汎用バルブのリターンポート圧力
汎用バルブのリターンポートで測定した呼び圧力。
データ長:
1バイト
分解能:
16 kPa/bit,オフセット0
データ範囲:
0 kPa〜4 000 kPa
タイプ:
測定値
SPN:
2943
A.21.39 汎用バルブのポート流量−コマンド
汎用バルブの伸び又は縮みポートを通る流量設定のコマンドで,全流量に対する比率で表示する。
0 %は全く流量がないことを,100 %は最大流量を示す。流れは反対側のポートを通じてトラクタに戻る。
データ長:
1バイト
分解能:
0.4 %/bit,0 %オフセット
データ範囲:
0 %〜100 %
タイプ:
コマンド
SPN:
2944
33
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.21.40 汎用バルブの状態−コマンド
汎用バルブの状態を設定するコマンド。
フローティング状態のとき,作業機を動かすことによって,作動油がバルブへ又はバルブから流れても
よい。
データ長:
4ビット
値
意味
0000
ブロック
0001
伸び
0010
縮み
0011
フローティング
0100〜1101
予約
1111
ドントケア
タイプ:
コマンド
SPN:
2933
A.21.41 汎用バルブのフェールセーフモード−コマンド
汎用バルブのフェールセーフモードを設定するコマンド。
データ長:
2ビット
値
意味
00
ブロック
01
フロート
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2935
A.21.42 汎用バルブのフェールセーフモード
汎用バルブのフェールセーフモードの測定状態。
データ長:
2ビット
値
意味
00
ブロック
01
フロート
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
2934
A.21.43 汎用バルブの負荷検出圧力
汎用バルブの作業ポートA及びBのうち,現時点で測定された圧力の高い方。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
4086
A.21.44 汎用バルブのパイロット圧力
汎用バルブのパイロット供給ポートで測定した圧力。
34
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
1バイト
分解能:
16 kPa/bit,オフセット0
データ範囲:
0 kPa〜4 000 kPa
タイプ:
測定値
SPN:
4087
A.21.45 汎用バルブアセンブリの負荷検出圧力
バルブ2個以上で構成できる汎用バルブアセンブリで,全ての負荷で検知する現時点で測定された圧力
の最大測定圧力。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
4088
A.21.46 汎用バルブアセンブリの供給圧力
バルブアセンブリへの油圧供給ポートの測定圧力。
データ長:
2バイト
分解能:
5 kPa/bit,オフセット0
データ範囲:
0 kPa〜321 275 kPa
タイプ:
測定値
SPN:
4089
A.21.47 汎用バルブの測定制限ステータス
持続的である汎用バルブの流量コマンドと関連し,トラクタECUの現時点で測定された流量制限状態を
伝えるパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
35
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
タイプ:
測定値
SPN:
5192
A.21.48 汎用バルブの推定制限ステータス
持続的である汎用バルブの流量コマンドと関連し,トラクタECUの現時点で推定された流量制限状態を
伝えるパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5193
A.22 照明パラメータ
A.22.1 ハイビームヘッドライト−コマンド
機械のハイビームヘッドライト3) を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2347
A.22.2 ハイビームヘッドライト
機械のハイビームヘッドライト3) からの測定データを供給するパラメータ。
36
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2348
注3) JISとしては関係ないので削除する。
A.22.3 ロービームヘッドライト−コマンド
機械のロービームヘッドライト4) を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2349
A.22.4 ロービームヘッドライト
機械のロービームヘッドライト4) からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2350
注4) 注3) に同じ。
A.22.5 代替ヘッドライト−コマンド
機械の代替ヘッドライト(ロービームだけ利用可能)4), 5) を点灯又は消灯するコマンド。代替ヘッドラ
イトは,主ヘッドライトがローダー又はスノウプラウでブロックする可能性がある場合に使用する。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2351
注5) 注3) に同じ。
37
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.22.6 代替ヘッドライト
代替ヘッドライト6), 7) からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2352
注6) 注3) に同じ。
7) 注3) に同じ。
A.22.7 トラクタのフロントローマウント作業灯−コマンド
トラクタのフロントローマウント作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2353
A.22.8 トラクタのフロントローマウント作業灯
トラクタのフロントローマウント作業灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2354
A.22.9 トラクタのフロントハイマウント作業灯−コマンド
トラクタのフロントハイマウント作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2355
38
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.22.10 トラクタのフロントハイマウント作業灯
トラクタのフロントハイマウント作業灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2356
A.22.11 トラクタの下側作業灯−コマンド
トラクタの下側作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2357
A.22.12 トラクタの下側取付け作業灯
トラクタの下側取付け作業灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2358
A.22.13 トラクタのリヤローマウント作業灯−コマンド
トラクタのリヤローマウント作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2359
A.22.14 トラクタのリヤローマウント作業灯
トラクタのリヤローマウント作業灯からの測定データを供給するパラメータ。
39
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2360
A.22.15 トラクタのリヤハイマウント作業灯−コマンド
トラクタのリヤハイマウント作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2361
A.22.16 トラクタのリヤハイマウント作業灯
トラクタのリヤハイマウント作業灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2362
A.22.17 トラクタのサイドローマウント作業灯−コマンド
トラクタのサイドローマウント作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2363
A.22.18 トラクタのサイドローマウント作業灯
トラクタのサイドローマウント作業灯からの測定データを供給するパラメータ。
40
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2364
A.22.19 トラクタのサイドハイマウント作業灯−コマンド
トラクタのサイドハイマウント作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2365
A.22.20 トラクタのサイドハイマウント作業灯
トラクタのサイドハイマウント作業灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2366
A.22.21 左折方向指示灯−コマンド
トラクタ及び接続する全作業機の左折方向指示灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2367
A.22.22 左折方向指示灯
トラクタ及び装着作業機の左折方向指示灯からの測定データを供給するパラメータ。
41
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2368
A.22.23 右折方向指示灯−コマンド
トラクタ及び接続する全作業機の右折方向指示灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2369
A.22.24 右折方向指示灯
トラクタ及び装着作業機の右折方向指示灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2370
A.22.25 左制動灯−コマンド
トラクタ及び作業機の左制動灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2371
A.22.26 左制動灯
トラクタ及び装着作業機の左制動灯からの測定データを供給するパラメータ。
42
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2372
A.22.27 右制動灯−コマンド
トラクタ及び作業機の右制動灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2373
A.22.28 右制動灯
トラクタ及び装着作業機の右制動灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2374
A.22.29 中央制動灯−コマンド
トラクタ及び作業機の中央制動灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2375
A.22.30 中央制動灯
トラクタ及び装着作業機の中央制動灯からの測定データを供給するパラメータ。
43
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2376
A.22.31 トラクタの標識(ポジション)灯−コマンド
トラクタの,車幅灯,尾灯,一連の側方灯,番号(ナンバプレート)灯,計器類及びスイッチ類の背景
灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2377
A.22.32 トラクタの標識(ポジション)灯
トラクタの,車幅灯,尾灯,一連の側方灯,番号(ナンバプレート)灯,計器類及びスイッチ類の背景
灯を含むトラクタ標識灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2378
A.22.33 作業機の標識(ポジション)灯−コマンド
作業機の,車幅灯,尾灯,一連の側方灯,番号(ナンバプレート)灯,計器類及びスイッチ類の背景灯
を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2379
A.22.34 作業機の標識(ポジション)灯
作業機の,車幅灯,尾灯,一連の側方灯,番号(ナンバプレート)灯,計器類及びスイッチ類の背景灯
44
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を含む作業機標識灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2380
A.22.35 トラクタのクリアランス灯−コマンド
トラクタのハイマウントクリアランス灯,及びセンタ認識灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2381
A.22.36 トラクタのクリアランス灯
トラクタのハイマウントクリアランス灯,及びセンタ認識灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2382
A.22.37 作業機のクリアランス灯−コマンド
作業機のハイマウントクリアランス灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2383
A.22.38 作業機のクリアランス灯
作業機のハイマウントクリアランス灯からの測定データを供給するパラメータ。
45
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2384
A.22.39 回転灯−コマンド
トラクタか作業機又は両方の,低速車(スロームービングビークル,SMV)の指示(回転)灯を点灯又
は消灯するコマンド。
低速車の指示灯の点灯は,コントローラが,必要に応じて,灯火を操作することが望ましい。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2385
注記 我が国では,回転灯の使用に制限があるため,道路運送車両法を確認する必要がある。
A.22.40 回転灯
トラクタ又は装着作業機の回転灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2386
A.22.41 トラクタフロントフォグライト−コマンド
トラクタのフロントフォグライトを点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2387
A.22.42 トラクタフロントフォグライト
トラクタのフロントフォグライトからの測定データを供給するパラメータ。
46
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2388
A.22.43 リヤフォグライト−コマンド
トラクタか作業機又は両方のリヤフォグライトを点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2389
A.22.44 リヤフォグライト
トラクタか作業機又は両方のリヤフォグライトからの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2390
A.22.45 作業機リヤ作業灯−コマンド
作業機のリヤ作業灯を点灯又は消灯するコマンド。
注記 これは,トラック用途の後退灯と同じである。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2405
A.22.46 作業機リヤ作業灯
作業機のリヤ作業灯からの測定データを供給するパラメータ。
47
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2394
A.22.47 作業機OEMオプションライト1−コマンド
タンク検査又は充塡ライトのような,作業機の特殊な要求を満たすために提供する作業機OEM オプシ
ョンライト1を,点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2395
A.22.48 作業機OEMオプションライト1
作業機OEMオプションライト1からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2396
A.22.49 作業機OEMオプションライト2−コマンド
タンク検査又は充塡ライトのような,作業機の特殊な要求を満たすために提供する作業機OEMオプシ
ョンライト2を,点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2397
A.22.50 作業機OEMオプションライト2
作業機OEM オプションライト2からの測定データを供給するパラメータ。
48
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2398
A.22.51 後退灯及び後退警音器−コマンド
必要に応じて後退灯及び/又は関連した警音を,点灯/発報したり消灯/発報停止したりするコマンド。
データ長:
2ビット
値
意味
00
消灯/発報停止
01
点灯/発報
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2391
A.22.52 後退灯及び後退警音器
後退灯,関連した警音又は両方からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中/発報停止中
01
点灯中/発報中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2392
A.22.53 作業機左前方作業灯−コマンド
作業機の左前方を照らす作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2397
A.22.54 作業機左前方作業灯
作業機の左前方を照らす作業灯からの測定データを供給するパラメータ。
49
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2598
A.22.55 作業機右前方作業灯−コマンド
作業機の右前方を照らす作業灯を点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2406
A.22.56 作業機右前方作業灯
作業機の右前方を照らす作業灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2407
A.22.57 作業機左向き作業灯−コマンド
作業機に取り付けられ,作業機左端先の照明用作業灯を,点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2399
A.22.58 作業機左向き作業灯
作業機に取り付けられ,作業機左端先の照明用作業灯からの測定データを供給するパラメータ。
50
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2400
A.22.59 作業機右向き作業灯−コマンド
作業機に取り付けられ,作業機右端先の照明用作業灯を,点灯又は消灯するコマンド。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2401
A.22.60 作業機右向き作業灯
作業機に取り付けられ,作業機右端先の照明用作業灯からの測定データを供給するパラメータ。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2402
A.22.61 日中走行ライト−コマンド
トラクタ又は動力車両の走行ライトを点灯又は消灯するコマンド。
注記 通常は,路上走行車で使用する。
データ長:
2ビット
値
意味
00
消灯
01
点灯
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2403
A.22.62 日中走行ライト
トラクタ又は動力車両の走行ライトからの測定データを供給するパラメータ。
51
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
消灯中
01
点灯中
10
故障検出
11
利用不可
タイプ:
測定値
SPN:
2404
A.22.63 照明データメッセージ要求−コマンド
ライト点灯状態を提供する全ての照明コントローラに,照明データメッセージを要求するコマンド。
データ長:
2ビット
値
意味
00
データ不要求
01
データ要求
10
予約
11
ドントケア
タイプ:
コマンド
SPN:
2393
A.22.64 バックグラウンド照明レベル−コマンド
計器及び照明制御のレベルを設定するコマンド。
データ長:
1バイト
分解能:
0.4 %/bit,オフセット0
データ範囲:
0 %〜100 %
タイプ:
コマンド
SPN:
1487
A.23 言語コマンドパラメータ
A.23.1 言語コード
全てのECUに対して送信するコマンドで,情報に関してオペレータが希望する言語を特定するもの。
ISO 11783規格群ネットワークは,ISO 639規格群に準拠した2文字列の言語コードを使用する。
例 オランダ語:n,フランス語:fr,英語:en,ドイツ語:de,日本語:ja
データ長:
2バイト
分解能:
7ビットISO Latin1文字
タイプ:
コマンド
SPN:
2410
A.23.2 小数点記号
全てのECUに対して送信するコマンドで,小数点記号として,ポイント又はカンマのどちらを表示する
かを特定するもの。
52
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
カンマ使用
01
ポイント使用
10
予約
11
何もしない。
タイプ:
コマンド
SPN:
2411
A.23.3 日付フォーマット
全てのECUに送られるコマンドで,日付の表示フォーマットを特定するもの。
データ長:
8ビット
値
意味
0
ddmmyyyy
1
ddyyyymm
2
mmyyyydd
3
mmddyyyy
4
yyyymmdd
5
yyyyddmm
6−250
予約
タイプ:
コマンド
SPN:
2412
A.23.4 時間フォーマット
全てのECUに送られるコマンドで,時間の表示フォーマットを特定するもの。
データ長:
2ビット
値
意味
00
24 h
01
12 h (am/pm)
10
予約
11
何もしない。
タイプ:
コマンド
SPN:
2413
A.23.5 測定パラメータの単位
A.23.5.1 一般
これらは,情報の表示に使用する測定単位を指定するために,全てのECUに送信する。
A.23.5.2 距離単位
距離単位を指定するコマンド。
データ長:
2ビット
値
意味
00
メートル法(キロメートル,メートル,…)
01
英国/米国単位系(マイル,フィート,…)
10
予約
11
何もしない。
タイプ:
コマンド
SPN:
2414
53
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.23.5.3 面積単位
面積単位を指定するコマンド。
データ長:
2ビット
値
意味
00
メートル法(ヘクタール,平方メートル,…)
01
英国/米国単位系(エーカー,平方フィート,…)
10
予約
11
何もしない。
タイプ:
コマンド
SPN:
2415
A.23.5.4 体積単位
体積単位を指定するコマンド。
データ長:
2ビット
値
意味
00
メートル法
01
英国単位系(ガロン)
10
米国単位系(ガロン)
11
何もしない。
タイプ:
コマンド
SPN:
2416
A.23.5.5 質量単位
質量単位を指定するコマンド。
データ長:
2ビット
値
意味
00
メートル法(トン,キログラム,…)
01
英国単位系(ロングトン,ポンド,…)
10
米国単位系(ショートトン,ポンド,…)
11
何もしない。
タイプ:
コマンド
SPN:
2417
A.23.5.6 温度単位
温度単位を指定するコマンド。
データ長:
2ビット
値
意味
00
メートル法(摂氏,絶対温度,…)
01
英国/米国単位系(華氏,…)
10
予約
11
何もしない。
タイプ:
コマンド
SPN:
5194
A.23.5.7 圧力単位
圧力単位を指定するコマンド。
54
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
メートル法(キロパスカル,パスカル,…)
01
英国/米国単位系(ポンド/平方インチ,…)
10
予約
11
何もしない。
タイプ:
コマンド
SPN:
5195
A.23.5.8 力の単位
力の単位を指定するコマンド。
データ長:
2ビット
値
意味
00
メートル法(ニュートン,…)
01
英国/米国単位系(ポンド重,…)
10
予約
11
何もしない。
タイプ:
コマンド
SPN:
5196
A.23.5.9 単位系
任意の単位又はA.23.5.2〜A.23.5.8で明記されたもの以外の単位表示に使用する単位系を指定するコマ
ンド。
データ長:
2ビット
値
意味
00
メートル法
01
英国単位系
10
米国単位系
11
何もしない。
タイプ:
コマンド
SPN:
5197
A.23.6 送信周期−コマンド
そのメッセージ内で関連付けられたPGNの,メッセージ送信周期のコマンド値を定義するパラメータ。
値が65 535のときは変更要求なしの意味であるが,値が0のときはデフォルト値を使用する意味である。
データ長:
2バイト
分解能:
1 ms
データ範囲:
0〜64 255
タイプ:
測定値
SPN:
2418
A.23.7 送信周期
そのメッセージ内で関連付けられたPGNのメッセージ送信周期の実際値。
データ長:
2バイト
分解能:
1 ms
データ範囲:
0〜64 255
55
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
タイプ:
測定値
SPN:
5198
A.24 ワーキングセットパラメータ
A.24.1 ワーキングセットのメンバ数
特定のワーキングセットは,このパラメータを含むメッセージの送信元アドレス(以下,SAという。)
に関連付けられたワーキングセットマスタのNAMEによって識別する。どのメンバ(ECUでなく,特定
のNAMEで識別するように)も,一度に複数のワーキングセットには属することはできない。ワーキング
セットは,ISO 11783-1及びISO 11783-6に示す。
データ長:
8ビット
分解能:
1
データ範囲:
1〜250
SPN:
2409
A.24.2 ワーキングセットメンバのNAME
このパラメータは,ワーキングセットのメンバを識別するJIS B 9225-5で定義されたフォーマットの
NAMEである。このNAMEは,それに関連付けられたSAをクレームした際に,メンバが使用したものと
同じである。
データ長:
8バイト
分解能:
1カウント/bit
データ範囲:
0〜(264−1)
タイプ:
測定値
SPN:
2845
A.25 作業機作動状態のパラメータ
A.25.1 作業機作動状態−コマンド
接続された作業機システムの作動状態を設定するコマンド。
データ長:
2ビット
値
意味
00
作業機をほ(圃)場作業状態に設定
01
作業機を運搬状態に設定
10
作業機を駐車状態に設定
11
何もしない。
タイプ:
コマンド
SPN:
5139
A.25.2 作業機の作動スタート/ストップ
作業機の作動を,始動する又は有効にするための,スイッチ又は他のオペレータ入力の状態。作業機が
作動ポジションにあるときは,始動又は始動可能な状態である。これは,オペレータがスイッチをON状
態にすることで得られる。このため,“マスタON/OFF”スイッチとも呼ばれる。
56
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
作業機作動停止又は無効
01
作業機作動始動又は有効
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
5203
A.25.3 全作業機停止操作
接続システムを直ちに停止する,スイッチ又は他のオペレータ入力の状態。このスイッチが,全作業機
作動の停止に使われたとき,“全作業機の作動状態を許可”では,直ちに作業機は再始動しない。この状態
で,作業機を再始動するためには,始動/停止(“マスタON/OFF”)スイッチ又は他の方法が必要である。
データ長:
2ビット
値
意味
00
作業機作動停止
01
全作業機の作動状態を許可 ON
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
5140
A.26 トラクタの制御パラメータ
A.26.1 一般
これらのパラメータは,連結作業機又はけん引するトラクタの作業を制御するタスクコントローラで使
用する。それによって,接続システムの性能が最適化する。トラクタは,各制御モードの制約を判断し,
コマンドに対して適切に応答する必要がある。
A.26.2 トラクタの制御モードコマンド
A.26.2.1 一般
連結作業機,タスクコントローラ,又は仮想端末(VT)上でトラクタECUインタフェースを使用する
オペレータからのコマンドである。これらは,トラクタECUのオプション機能の制御モードを設定するた
めに使用する。
これらのモードは,出力,スピード及びスリップの最適化,並びに進行方向の制御に着目して,最適化
する目標の様々な組合せを制御実現する。個々の制御モードは,A.26.2.2〜A.26.2.10による。
データ長:
5ビット
値
意味
00000
リモート制御を無効にする。
00001
クルーズ制御を有効にする。
00010
フロントヒッチスリップ制御を有効にする。
00011
リヤヒッチスリップ制御を有効にする。
00100
フロントPTOスリップ制御を有効にする。
00101
リヤPTOスリップ制御を有効にする。
00110
減速スリップ制御を有効にする。
00111
補助バルブスリップ制御を有効にする。
57
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
値
意味
01000
最大けん引力制御を有効にする。
01001
定速PTO速度制御を有効にする。
01010
定速PTO速度及びクルーズ制御の複合モードを有効にする。
01011
最低エンジン速度制御を有効にする。
01100
エンジンエコノミー及びクルーズ制御の複合モードを有効にする。
01101
フロントPTOトルク制御を有効にする。
01110
リヤPTOトルク制御を有効にする。
01111
フロントけん引負荷制御を有効にする。
10000
リヤけん引負荷制御を有効にする。
10001〜11110
予約
11111
ドントケア
タイプ:
コマンド
SPN:
5204
A.26.2.2 クルーズ制御
トラクタが固定された対地速度を維持するためのコマンド。
この速度は,ホイール回転速度,対地速度又はナビゲーションシステムの速度から算出してもよい。ト
ラクタは,現作動条件に対して現在のトラクタでどの測定値を得ることができるかを決定し,最も正確な
測定値を提供する。また,その測定値を制御で使用する。ISO 11783-9に示す。
値
意味
00001
クルーズ制御を有効にする。
A.26.2.3 スリップ制御
トラクタと土の接触面との動力ロスを減らすために,トラクション装置のスリップを制限するコマンド。
スリップを制限するには,異なる制御の考え方に基づいた様々なモードがあり,それぞれに長所及び短
所がある。
− リヤヒッチスリップ制御は,けん引力を減らすために,ヒッチに装着された作業機の作業深さを調整
して,トラクタ後方へ重量を転移させる。2輪駆動及び機械式前輪駆動(MFWD)トラクタの場合,
重量転移は,トラクションを改善させるために後輪の駆動ホイールの荷重を増加させる。4輪駆動及
びクローラ形トラクタの場合,この重量転移は効果が少ないか全くない。このモードでは,深さ調整
をするので,作業深さが一定にならない結果になる。
− フロントヒッチスリップ制御は,けん引力を減らすために,フロントに装着された作業機の作業深さ
を調整するが,トラクタに有効な重量転移が生じない。このモードでは,深さ調整をするので,作業
深さが一定にならない結果になる。
− 補助バルブスリップ制御は,けん引力を減らすために,けん引された作業機の作業深さを調整するが,
トラクタに有効な重量転移は生じない。このモードでは,深さ調整をするので,作業深さが一定にな
らない結果になる。
− フロント又はリヤPTOスリップ制御は,可変PTOを備えたトラクタと組み合わせて必要けん引力を
低減できる作業機(例えば,パワーハロー)で,けん引力を低減するためにPTO回転速度を調整する。
このモードでは,作業深さが一定になり,かつ,全出力(PTO出力とけん引出力との合計)を最大限
にできるが,最適でない速度でエンジンを運転するのを避けるため,エンジン回転速度とは別にPTO
回転速度を調整する機能が必要となる。
− 減速スリップ制御は,必要けん引力を減らすために,車両の対地速度を調整する。このモードでは,
58
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
作業深さが一定であるが,最大出力以下での作動となる。
値
意味
00010
フロントヒッチスリップ制御を有効にする。
00011
リヤヒッチスリップ制御を有効にする。
00100
フロントPTOスリップ制御を有効にする。
00101
リヤPTOスリップ制御を有効にする。
00110
減速スリップ制御を有効にする。
00111
補助バルブスリップ制御を有効にする。
A.26.2.4 最大けん引力モード
変速比を変えてけん引力を最大にするために,動力伝達性能(power train performance strategy)を設定す
るコマンド[すなわち,一定のエンジン回転速度(rpm)が減少したとき減速し(変速比を上げ),エンジ
ン回転速度(rpm)が回復又は最大出力点から超過したとき増速させる(変速比を下げる。)。]。
値
意味
01000
最大けん引力制御を有効にする。
A.26.2.5 定速PTO回転速度モード
クルーズ制御モードに基づいて,定速PTO回転速度モードを設定するコマンド。
値
意味
01001
定速PTO速度制御を有効にする。
01010
定速PTO速度及びクルーズ制御の複合モードを有効にする。
A.26.2.6 最低エンジン回転速度モード
騒音及び燃料消費を低減するために,エンジン回転速度,スロットル位置及びギヤ比を変えて,トラク
タの最低エンジン速度制御モードを設定するコマンド。
値
意味
01011
最低エンジン速度制御を有効にする。
A.26.2.7 エコノミーエンジン制御モード
最低限の燃料消費を達成するために,エンジン回転速度,スロットル位置及びギヤ比を変えて,トラク
タのエコノミーエンジン制御モードを設定するコマンド。
値
意味
01100
エンジンエコノミー及びクルーズ制御の複合モードを有効にする。
A.26.2.8 フロントPTOトルク制御モード
PTO駆動の作業機を過負荷から守るために使うフロントPTOトルク制御モードを設定するコマンド。
値
意味
01101
フロントPTOトルク制御を有効にする。
A.26.2.9 リヤPTOトルク制御モード
PTO駆動の作業機を過負荷から守るために使うリヤPTOトルク制御モードを設定するコマンド。
値
意味
01110
リヤPTOトルク制御を有効にする。
A.26.2.10 ドラフト制御モードコマンド
A.26.2.10.1 リヤけん引負荷制御
けん引負荷を減らしてトラクタ後方へ重量を移動させるために,ヒッチに装着された作業機の作業深さ
を調整するコマンド。
2輪駆動及び機械式前輪駆動(MFWD)トラクタの場合,重量転移は,トラクションを改善させるため
59
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に後輪の駆動ホイールの荷重を増加させる。4輪駆動及びクローラ形トラクタの場合,この重量転移は,
効果が少ないか全くない。このモードでは深さ調整をするので,作業深さが一定にならない結果となる。
値
意味
10000
リヤけん引負荷制御を有効にする。
A.26.2.10.2 フロントけん引負荷制御
けん引負荷を減らすために,フロントに装着された作業機の作業深さを調整するが,トラクタに有効な
重量転移が生じない。
このモードは,深さ調整の結果,作業深さと一定にならない結果となる。
値
意味
01111
フロントけん引負荷制御を有効にする。
A.26.3 トラクタの制御コマンド値パラメータ
A.26.3.1 一般
トラクタECUに送られる作業機コマンドによって完結する,指示値を提供するパラメータ。
A.26.3.2 指示車両速度
ホイール,対地又はナビゲーションに基づいたトラクタ速度の指示値。
データ長:
2バイト
デフォルト値:
0
分解能:
0.001 m/s/bit,上位バイト0.256 m/s/bit
オフセット:
0 m/s
データ範囲:
0〜64 255
単位:
メートル毎秒
タイプ:
コマンド
SPN:
5205
A.26.3.3 指示PTO速度
フロント又はリヤPTO速度の指示値。
データ長:
2バイト
デフォルト値:
850
分解能:
0.125 min−1/bit
オフセット:
0 min−1
データ範囲:
0 min−1〜8 031.875 min−1
単位:
分の逆数8)
タイプ:
コマンド
SPN:
5206
注8) SI単位では,min−1と記号で表す。
A.26.3.4 指示ヒッチポジション
フロント又はリヤヒッチポジションの指示値。
データ長:
1バイト
デフォルト値:
0
分解能:
0.4 %/bit
オフセット:
0 %
60
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
コマンド
SPN:
5207
A.26.3.5 指示PTOトルク
フロント又はリヤPTOトルクの指示値。
データ長:
1バイト
デフォルト値:
0
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
コマンド
SPN:
5208
A.26.3.6 補助バルブスリップ制御コマンド
A.26.3.6.1 一般
指令された補助バルブのスリップ制御は,次の三つのパラメータを使用し,A.26.3.6.2〜A.26.3.6.4に規
定する。
データ長:
2バイト
バイト1:
補助バルブ流量(A.26.3.6.2参照)
バイト2: 8〜5ビット:補助バルブ状態(A.26.3.6.3参照)
4〜1ビット:補助バルブ番号(A.26.3.6.4参照)
タイプ:
コマンド
A.26.3.6.2 指示補助バルブ流量
A.26.3.6.4に規定したトラクタ補助バルブ番号からの流量のスリップ制御機能内で設定するコマンド。
データ長:
1バイト
デフォルト値:
0
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
コマンド
SPN:
5209
A.26.3.6.3 指示補助バルブ状態
A.26.3.6.4に規定した補助バルブ番号の状態を設定するコマンド。
フロートを有効にして,作業機によって駆動するときに作動油は,トラクタから又はトラクタへ流れて
もよい。
61
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
4ビット
値
意味
0000
ブロック
0001
伸び
0010
縮み
0011
フロート
0100〜1110
予約
1111
ドントケア
タイプ:
コマンド
SPN:
5210
A.26.3.6.4 指示補助バルブ番号
スリップ制御機能内で指示された流量設定値に対応して選ばれた補助バルブ番号。
注記 このバルブ番号は,制限値にも使用する。
データ長:
4ビット
デフォルト値:
0
分解能:
1/bit
オフセット:
0
データ範囲:
0〜15
単位:
バルブ番号
タイプ:
コマンド
SPN:
5211
A.26.3.7 指示けん引負荷
フロント又はリヤロワーリンクけん引負荷の指示値。
データ長:
1バイト
デフォルト値:
0
分解能:
1 000 N/bit
オフセット:
−100 000 N
データ範囲:
−100 000 N〜150 000 N
単位:
ニュートン
タイプ:
コマンド
SPN:
5212
A.26.4 トラクタの制御モードコマンド応答パラメータ
A.26.4.1 一般
オプション機能の制御モード設定でトラクタECUから測定されたパラメータ。
測定された制御モードは,A.26.4.2〜A.26.4.10に定義する。
データ長:
5ビット
値
意味
00000
リモート制御が無効である。
00001
対地速度クルーズ制御が有効である。
00010
ホイール速度クルーズ制御が有効である。
00011
ナビゲーションスピードクルーズ制御が有効である。
00100
フロントヒッチスリップ制御が有効である。
62
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
値
意味
00101
リヤヒッチスリップ制御が有効である。
00110
フロントPTOスリップ制御が有効である。
00111
リヤPTOスリップ制御が有効である。
01000
減速スリップ制御が有効である。
01001
補助バルブスリップ制御が有効である。
01010
最大けん引負荷制御が有効である。
01011
定速PTO速度制御が有効である。
01100
定速PTO速度対地速度クルーズ制御が有効である。
01101
定速PTO速度ホイール速度クルーズ制御が有効である。
01110
定速PTO速度ナビゲーションスピードクルーズ制御が有効である。
01111
最低エンジン速度制御が有効である。
10000
エンジンエコノミー対地速度クルーズ制御が有効である。
10001
エンジンエコノミーホイール速度クルーズ制御が有効である。
10010
エンジンエコノミーナビゲーションスピードクルーズ制御が有効である。
10011
フロントPTOトルク制御が有効である。
10100
リヤPTOトルク制御が有効である。
10101
フロントけん引負荷制御が有効である。
10110
リヤけん引負荷制御が有効である。
10111〜11110
予約
11111
利用不可
タイプ:
測定値
SPN:
5213
A.26.4.2 クルーズ制御
トラクタECUのオプション機能のクルーズ制御モード設定を伝えるパラメータ。
値
意味
00001
対地速度クルーズ制御が有効である。
00010
ホイール速度クルーズ制御が有効である。
00011
ナビゲーションスピードクルーズ制御が有効である。
A.26.4.3 スリップ制御
トラクタECUのスリップ制御モード設定を伝えるパラメータ。
値
意味
00100
フロントヒッチスリップ制御が有効である。
00101
リヤヒッチスリップ制御が有効である。
00110
フロントPTOスリップ制御が有効である。
00111
リヤPTOスリップ制御が有効である。
01000
減速スリップ制御が有効である。
01001
補助バルブスリップ制御が有効である。
A.26.4.4 最大けん引負荷
変速比を変えてけん引負荷を最大にする動力伝達性能の設定を伝えるパラメータ。
値
意味
01010
最大けん引負荷制御が有効である。
A.26.4.5 定速PTO回転速度
トラクタECUの定速PTO回転速度制御モード設定を伝えるパラメータ。
63
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
値
意味
01011
定速PTO速度制御が有効である。
01100
定速PTO速度対地速度クルーズ制御が有効である。
01101
定速PTO速度ホイール速度クルーズ制御が有効である。
01110
定速PTO速度ナビゲーションスピードクルーズ制御が有効である。
A.26.4.6 最低エンジン回転速度
騒音及び燃料消費を低減するために,エンジン回転速度,スロットル位置及びギヤ比を変えて,トラク
タの最低エンジン速度制御モードを伝えるパラメータ。
値
意味
01111
最低エンジン速度制御が有効である。
A.26.4.7 エコノミーエンジン制御
最低限の燃料消費を達成するために,エンジン回転速度,スロットル位置及びギヤ比を変えて,トラク
タのエコノミーエンジン制御モードを伝えるパラメータ。
値
意味
10000
エンジンエコノミー対地速度クルーズ制御が有効である。
10001
エンジンエコノミーホイール速度クルーズ制御が有効である。
10010
エンジンエコノミーナビゲーションスピードクルーズ制御が有効である。
A.26.4.8 フロントPTO トルク制御
PTO駆動の作業機を過負荷から守るために使うフロントPTOトルク制御モードを伝えるパラメータ。
値
意味
10011
フロントPTOトルク制御が有効である。
A.26.4.9 リヤPTO トルク制御
PTO駆動の作業機を過負荷から守るために使うリヤPTOトルク制御モードを伝えるパラメータ。
値
意味
10100
リヤPTOトルク制御が有効である。
A.26.4.10 ドラフト制御ステータス
トラクタのドラフト制御モード設定を伝えるパラメータ。
値
意味
10101
フロントけん引負荷制御が有効である。
10110
リヤけん引負荷制御が有効である。
A.26.5 トラクタの制御値応答パラメータ
A.26.5.1 一般
これらのパラメータは,トラクタの指示された制御モードの指示値を伝える。
A.26.5.2 車速設定点
ホイール,対地又はナビゲーション基準のトラクタ速度制御モードの指示値を伝えるパラメータ。
データ長:
2バイト
分解能:
0.001 m/s/bit,上位バイト0.256 m/s/bit
オフセット:
0 m/s
データ範囲:
0〜64.255
単位:
メートル毎秒
タイプ:
測定値
SPN:
5214
64
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.26.5.3 PTO回転速度設定点
フロント又はリヤPTO回転速度の指示値を伝えるパラメータ。
データ長:
2バイト
分解能:
0.125 min−1
オフセット:
0 min−1
データ範囲:
0 min−1〜8 031.875 min−1
単位:
分の逆数
タイプ:
測定値
SPN:
5215
A.26.5.4 ヒッチポジション設定点
フロント又はリヤヒッチポジションの指示値を伝えるパラメータ。
データ長:
1バイト
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
測定値
SPN:
5216
A.26.5.5 PTOトルク設定点
フロント又はリヤPTOトルクの指示値を伝えるパラメータ。
データ長:
1バイト
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
測定値
SPN:
5217
A.26.5.6 最大スリップ設定点
スリップ制御機能内で安定後の補助バルブの最大流量を伝えるパラメータ。
注記 選択されたバルブは,バルブ番号で示され,ポートの選択は,補助バルブのスリップ制御モー
ドの指示で行われる。
データ長:
1バイト
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
測定値/推定値
SPN:
5218
A.26.5.7 補助バルブスリップ制御
スリップ制御機能内の流量設定点を示す補助バルブ番号。また,このパラメータは流れの方向も含む。
65
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2バイト
バイト1:
補助バルブ流量(A.26.5.7.1参照)
バイト2: ビット8〜5:補助バルブ状態(A.26.5.7.2参照)
ビット4〜1:補助バルブ番号(A.26.5.7.3参照)
タイプ:
測定値
A.26.5.7.1 補助バルブ流量
A.26.5.7.3で示すトラクタ補助バルブ番号からの流量のスリップ制御機能内で設定値を伝えるパラメー
タ。
データ長:
1バイト
デフォルト値:
0
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
測定値/推定値
SPN:
5219
A.26.5.7.2 補助バルブ状態
スリップ制御機能内の流量制御のために選択されたバルブ状態を伝えるパラメータ。
データ長:
4ビット
値
意味
0000
ブロック
0001
伸び
0010
縮み
0011
フロート
0100〜1110
予約
1111
ドントケア
タイプ:
測定値
SPN:
5220
A.26.5.7.3 補助バルブ番号
スリップ制御機能内の流量制御のために選択された補助バルブ番号を伝えるパラメータ。
注記 このバルブ番号は,制限値にも使用する。
データ長:
4ビット
分解能:
1/bit
オフセット:
0
データ範囲:
0〜15
単位:
バルブ番号
タイプ:
測定値
SPN:
5221
A.26.5.8 けん引負荷設定点
フロント又はリヤロワーリンクけん引負荷の指示値を伝えるパラメータ。
データ長:
2バイト
66
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
分解能:
10 N/bit
オフセット:
−320 000 N
データ範囲:
−320 000 N〜322 550 N
単位:
ニュートン
タイプ:
測定値
SPN:
5222
A.26.6 トラクタの制御制限パラメータ
A.26.6.1 一般
これらのパラメータは,作業機からトラクタECUに送られるメッセージによって指示されたときに,指
示点に対する制限値の設定を伝え,トラクタコントローラで使用する。
A.26.6.2 けん引負荷制限設定点
指示されたフロント又はリヤロワーリンクけん引負荷の制限値を伝えるパラメータ。
データ長:
1バイト
分解能:
1 kN/bit
オフセット:
−100 kN
データ範囲:
−100 kN〜150 kN
単位:
ニュートン
タイプ:
測定値
SPN:
5223
A.26.6.3 PTOトルク制限設定点
指示されたフロント又はリヤPTOトルクの制限値を伝えるパラメータ。
データ長:
1バイト
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
測定値
SPN:
5224
A.26.6.4 最大PTOトルクの絶対値の制限設定点(540 rpm)
540 rpmのときの指示されたフロント又はリヤPTOトルクの絶対値の制限値を伝えるパラメータ。
データ長:
1バイト
分解能:
30 Nm/bit
オフセット:
0 Nm
データ範囲:
0 Nm〜7 500 Nm
単位:
ニュートンメートル
タイプ:
測定値
SPN:
5225
A.26.6.5 補助バルブ流量制限設定点
スリップ制御機能内で補助バルブからの安定後の流量制限値を伝えるパラメータ。
注記 この補助バルブ番号は,補助バルブ流量コマンドによって定義する。
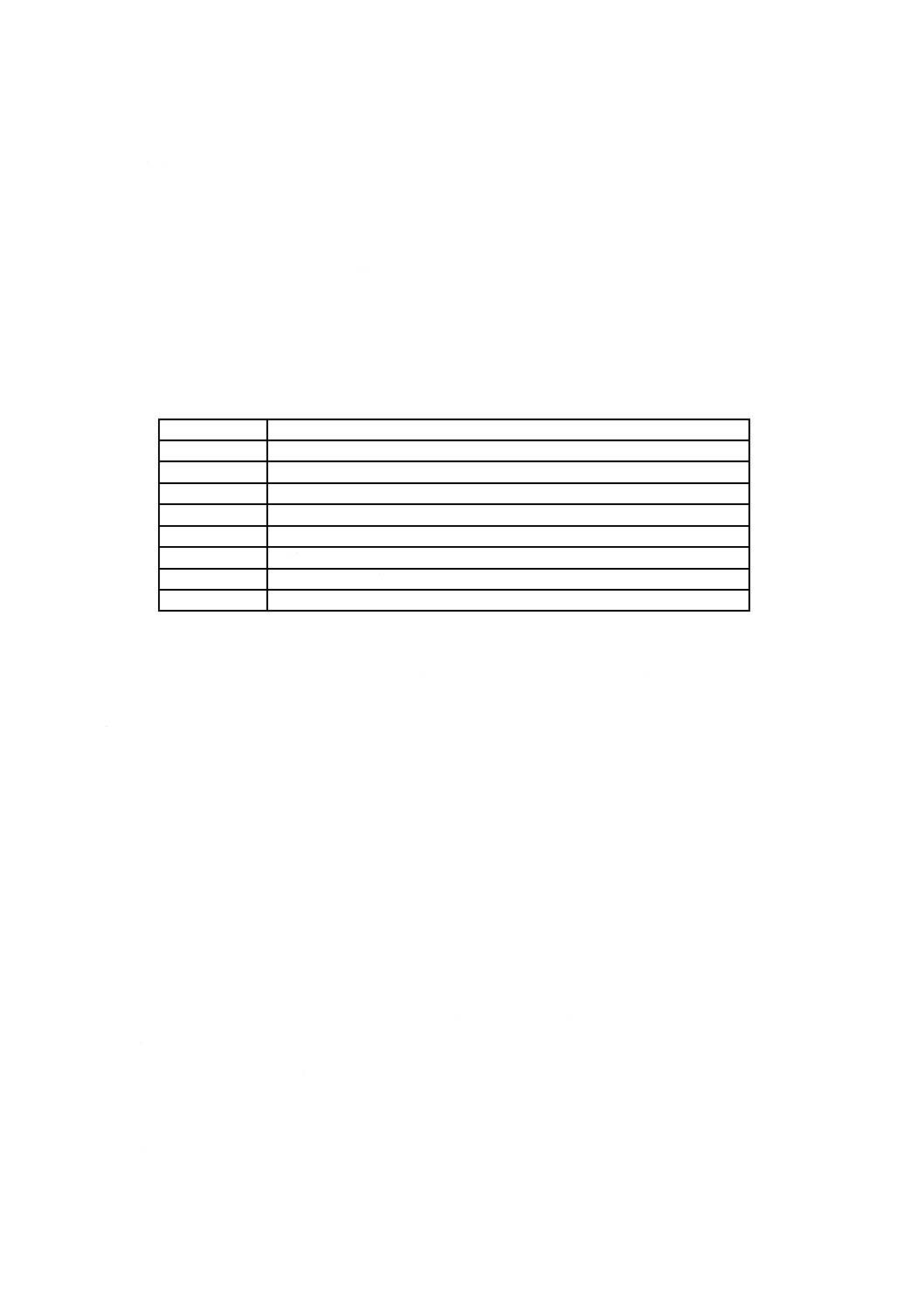
67
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
1バイト
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
測定値/推定値
SPN:
5226
A.26.7 トラクタの制御制限ステータス
連続的なコマンドのパラメータに関連付けられる,トラクタECUの現時点の制限状態を伝えるために使
用するパラメータ。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
5227
A.26.8 トラクタの制御制限コマンドパラメータ
A.26.8.1 一般
これらのパラメータは,作業機からトラクタECUに送られるメッセージによって指示されたときに,指
示点に対する制限値の設定を伝える。そして,トラクタコントローラで使用する。
A.26.8.2 けん引負荷制限設定点コマンド
指示されたフロント又はリヤロワーリンクけん引負荷の制限値を伝えるパラメータ。
データ長:
1バイト
分解能:
1 kN/bit
オフセット:
−100 kN
データ範囲:
−100 kN〜150 kN
単位:
ニュートン
68
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
タイプ:
コマンド
SPN:
5228
A.26.8.3 PTOトルク制限設定点コマンド
指示されたフロント又はリヤPTOトルクの制限値を伝えるパラメータ。
データ長:
1バイト
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
コマンド
SPN:
5229
A.26.8.4 最大PTOトルクの絶対値の制限設定点(540 rpm)コマンド
540 rpmのときの指示されたフロント又はリヤPTOトルクの絶対値の制限値を伝えるパラメータ。
データ長:
1バイト
分解能:
30 Nm/bit
オフセット:
0 Nm
データ範囲:
0 Nm〜7 500 Nm
単位:
ニュートンメートル
タイプ:
コマンド
SPN:
5230
A.26.8.5 補助バルブ流量制限設定点コマンド
スリップ制御機能内で補助バルブからの安定後の流量制限値を伝えるパラメータ。
注記 この補助バルブ番号は,補助バルブ流量コマンドによって定義する。
データ長:
1バイト
分解能:
0.4 %/bit
オフセット:
0 %
データ範囲:
0 %〜100 %
単位:
パーセント
タイプ:
コマンド
SPN:
5231
A.27 トラクタ機能のパラメータ
A.27.1 一般
トラクタECUの機能を要求し伝えるときに使用するパラメータ。
A.27.2 トラクタECUクラス要求
トラクタECUのクラスを要求するときに使用するパラメータ。
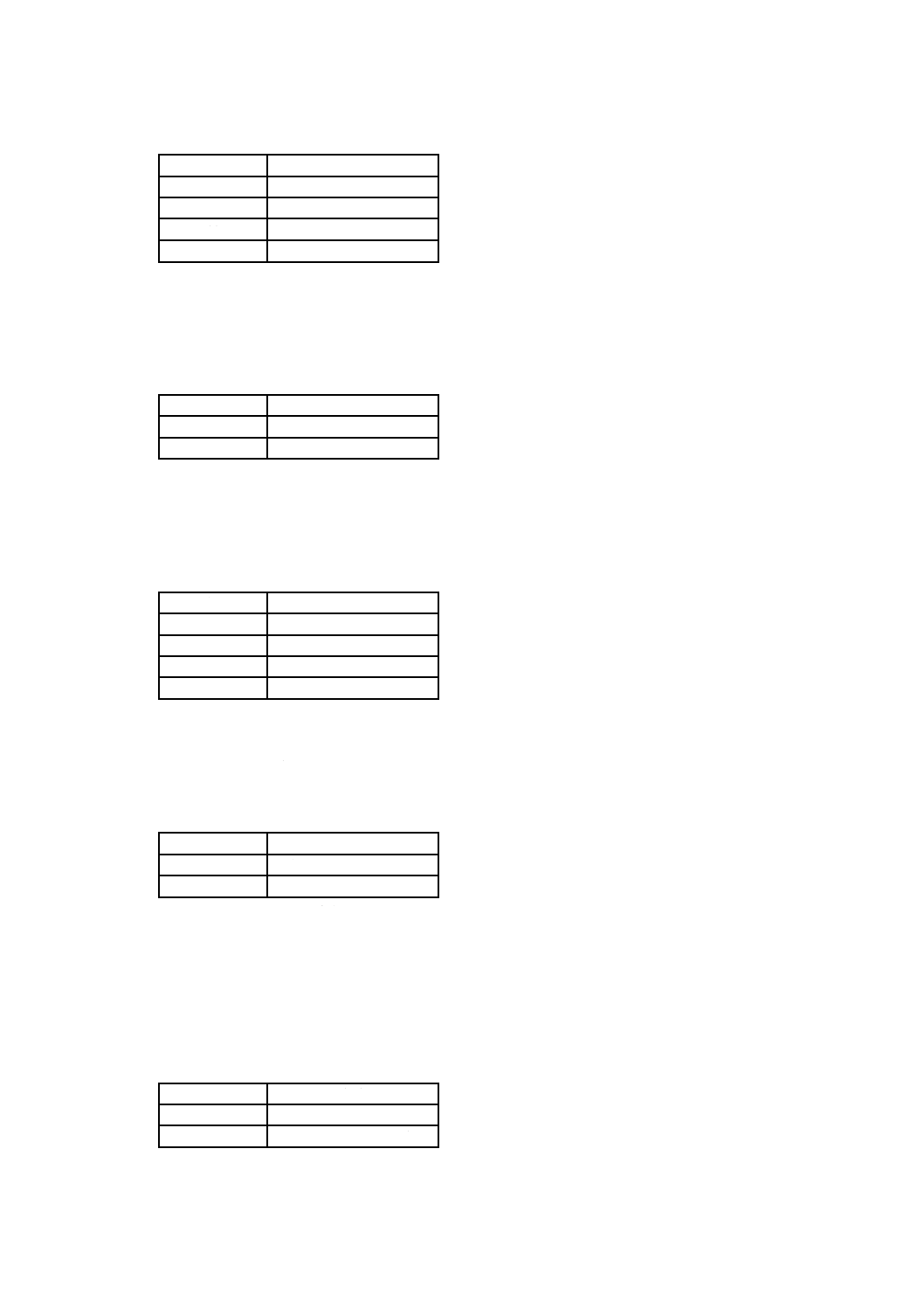
69
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
2ビット
値
意味
00
TECUクラス1
01
TECUクラス2
10
TECUクラス3
11
要求なし
タイプ:
コマンド
SPN:
5232
A.27.3 トラクタ機能の要求
トラクタECUの機能を要求するときに使用するパラメータ。
データ長:
1ビット
値
意味
0
機能を要求しない。
1
機能を要求する。
タイプ:
コマンド
SPN:
5233
A.27.4 トラクタのECUクラス応答
トラクタECUのクラス要求に応答するときに使用するパラメータ。
データ長:
2ビット
値
意味
00
TECUクラス1
01
TECUクラス2
10
TECUクラス3
11
利用不可
タイプ:
測定値
SPN:
5234
A.27.5 トラクタ機能の応答
トラクタECUの機能の要求に応答するときに使用するパラメータ。
データ長:
1ビット
値
意味
0
機能利用不可
1
機能利用可
タイプ:
測定値
SPN:
5235
A.27.6 トラクタ機能の予約ビット指示値
このパラメータは,メッセージ内の予約ビットが0又は1に設定されているかを示す。
注記 対応国際規格の旧規格では,トラクタ機能の予約ビットに対して例外を明記しておらず,予約
ビットは1に設定されているので,このパラメータは下位互換性に必要である。
データ長:
2ビット
値
意味
0
予約ビットは0に設定
1
予約ビットは1に設定
タイプ:
測定値
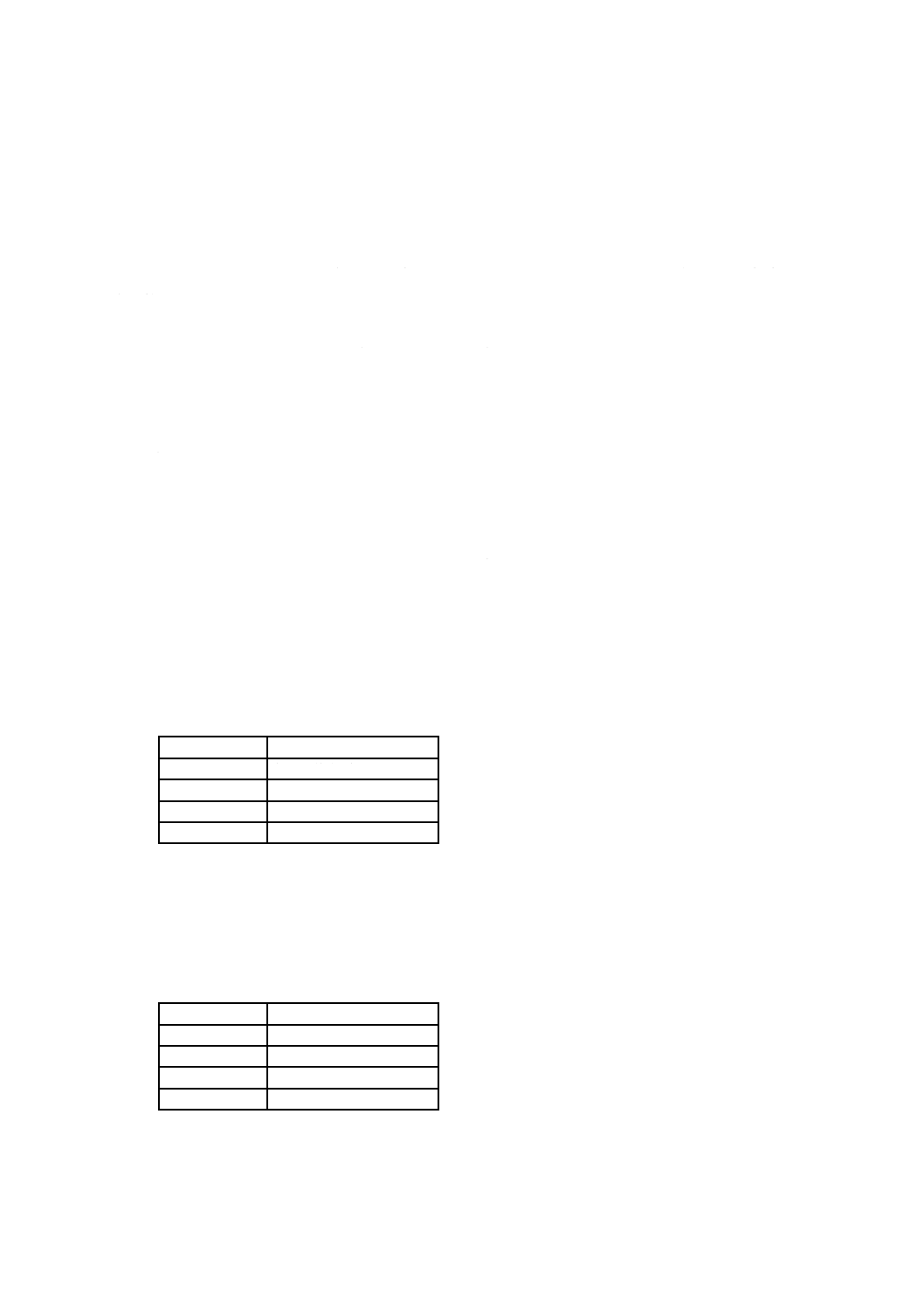
70
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
SPN:
5236
A.28 ガイダンスコマンド
A.28.1 曲率コマンド
機械の操だ(舵)システムが成立するために必要な地上の目標経路の曲率。目標の経路は,瞬間的な旋
回曲率半径の逆数として表現し,自動ガイダンスシステムで決める。曲率は車両が前進し,運転者に対し
て右に旋回しているときを正とする。
データ長:
2バイト
分解能:
0.25 km−1/bit,−8 032 km−1オフセット
データ範囲:
−8 032〜8 031.75 km−1
タイプ:
コマンド
SPN:
5237
A.28.2 推定曲率
現在の旋回曲率の機械ステアリングシステムによって指定する推定。曲率は車両が前進し,運転者に対
し右に旋回しているときを正とする。
データ長:
2バイト
分解能:
0.25 km−1/bit,−8 032 km−1オフセット
データ範囲:
−8 032〜8 031.75 km−1
タイプ:
測定値
SPN:
5238
A.28.3 曲率コマンドのステータス
このパラメータは,誘導システムがこのコマンドを実行し,制御しようとしているかどうかを示す。
データ長:
2ビット
値
意味
00
操だ(舵)意図なし
01
操だ(舵)意図あり
10
予約
11
利用不可
タイプ:
コマンド
SPN:
5239
A.28.4 要求リセットコマンドのステータス
機械ステアリングシステムは,曲率コマンドの状態,“操だ(舵)意図あり”から“操だ(舵)意図なし”
への変更を,自動誘導システムに要求する。
データ長:
2ビット
値
意味
00
リセット不要
01
リセット必要
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
5240
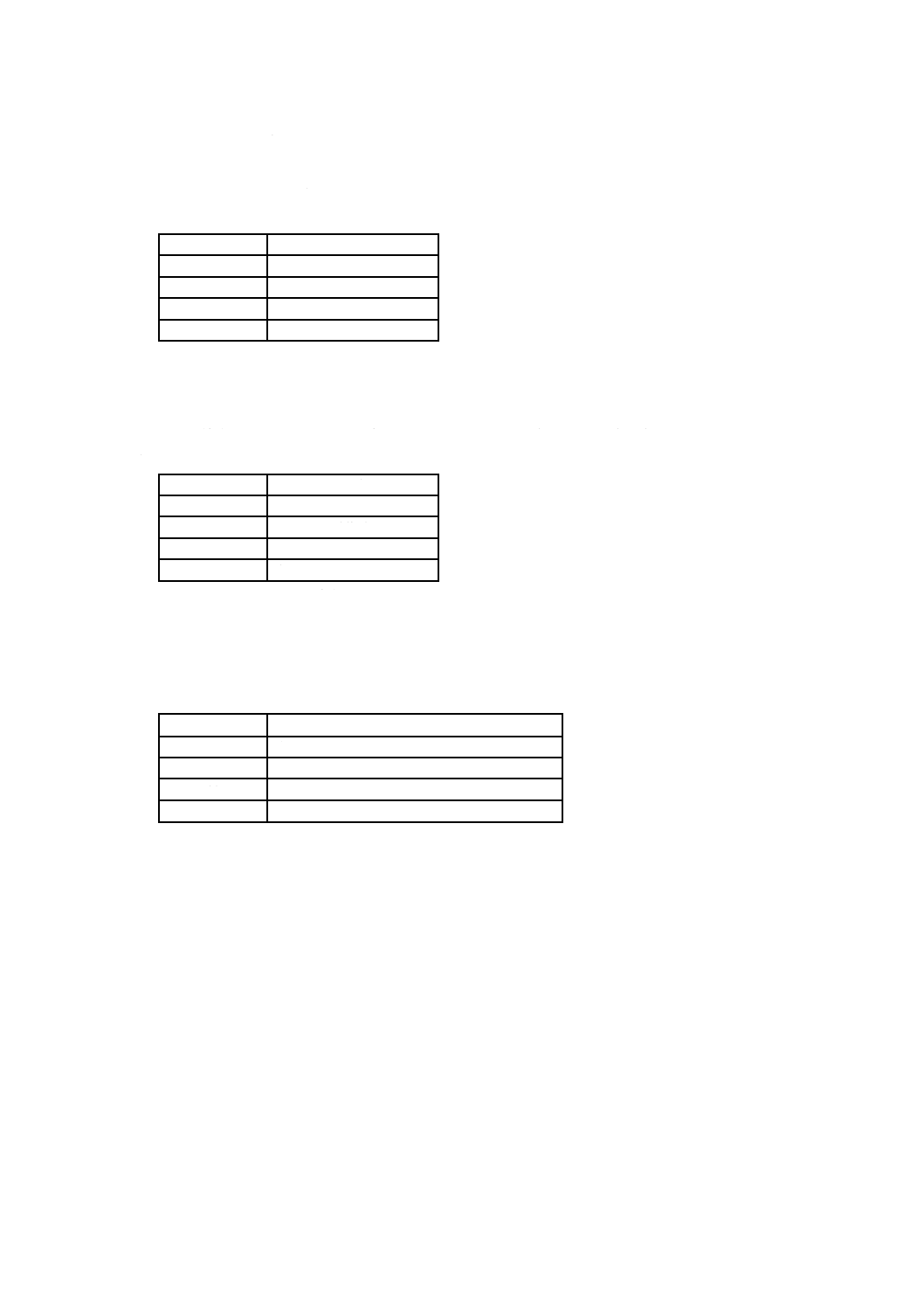
71
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.28.5 操だ(舵)入力ポジションステータス
機械の操だ(舵)システムは,手動操だ(舵)がガイダンスに対して正しい位置にあるかどうかを示す
(ステアリングが中立状態も含む。)。
データ長:
2ビット
値
意味
00
正しい位置ではない。
01
正しい位置である。
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
5241
A.28.6 操だ(舵)システムの準備状況
機械の操だ(舵)システムは,ガイダンスシステム動作を阻害する不具合が解消していることを示す。
データ長:
2ビット
値
意味
00
システム準備未完了
01
システム準備完了
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
5242
A.28.7 機械システムのロックアウト
運転者が自動操だ(舵)システム機能を無効にするロックアウトスイッチの状態。
データ長:
2ビット
値
意味
00
有効ではない。
01
有効[自動操だ(舵)をOFFにできる。]
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
5243
A.29 ISOBUS適合性認証パラメータ
A.29.1 ISOBUS適合性認証の年
認証試験を実施した適合性試験手順の年式。
データ長:
6ビット
分解能:
1年,2000年オフセット
データ範囲:
2 000〜2 061
タイプ:
測定値
SPN:
4313
A.29.2 ISOBUS適合性認証の改訂
実施された適合性試験の改訂。複数の試験手順改訂がある年は,認証年に加えて,アルファベットを末
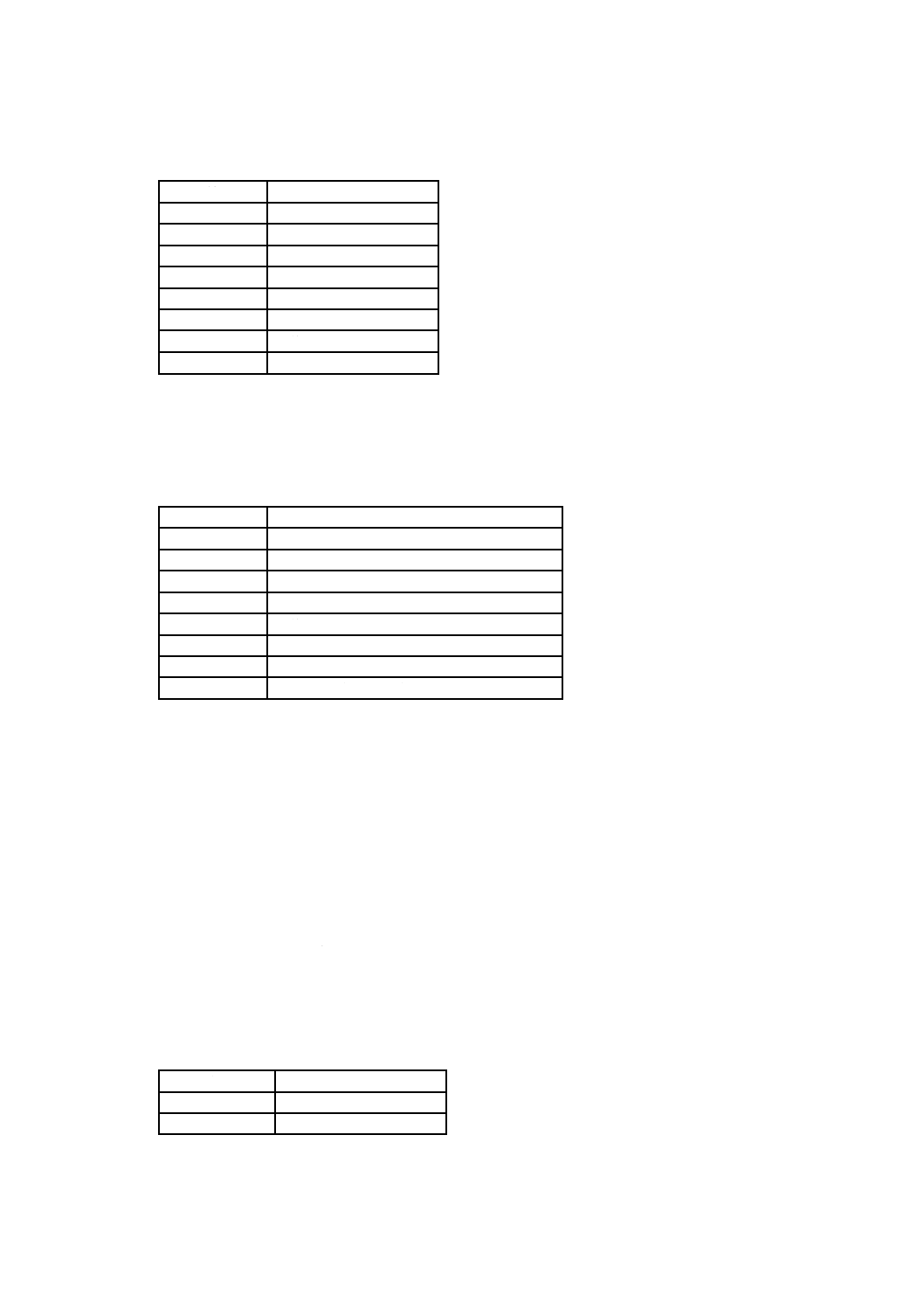
72
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
尾に追加する(A.29.1)。
データ長:
3ビット
値
意味
000
第1回改訂(接尾語ない)
001
第2回改訂(接尾語A)
010
第3回改訂(接尾語B)
011
第4回改訂(接尾語C)
100
予約
101
予約
110
予約
111
利用不可
タイプ:
測定値
SPN:
4314
A.29.3 ISOBUS適合性認証試験機関のタイプ
認証試験機関の団体。
データ長:
3ビット
値
意味
000
認証研究機関なし/自己認証
001
EU(欧州連合)内にある認証試験機関
010
NA(北米)内にある認証試験機関
011
予約
100
予約
101
予約
110
予約
111
利用不可(認証なし)
タイプ:
測定値
SPN:
4315
A.29.4 適合性認証試験機関のID
適合性試験を実施した試験機関の製造業者コード。自己認証ECUの場合,これは,アドレスクレームの
PGNに含まれる製造業者コードに一致する。このパラメータの値は,認証機関にて割当てる(ISO
11783-1:2007のB.6の表参照)。
データ長:
11ビット
分解能:
1/bit
データ範囲:
ISO 11783-1:2007の表B.6に従う。
タイプ:
測定値
SPN:
4316
A.29.5 適合性認証タイプ−ミニマムECU
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり9)
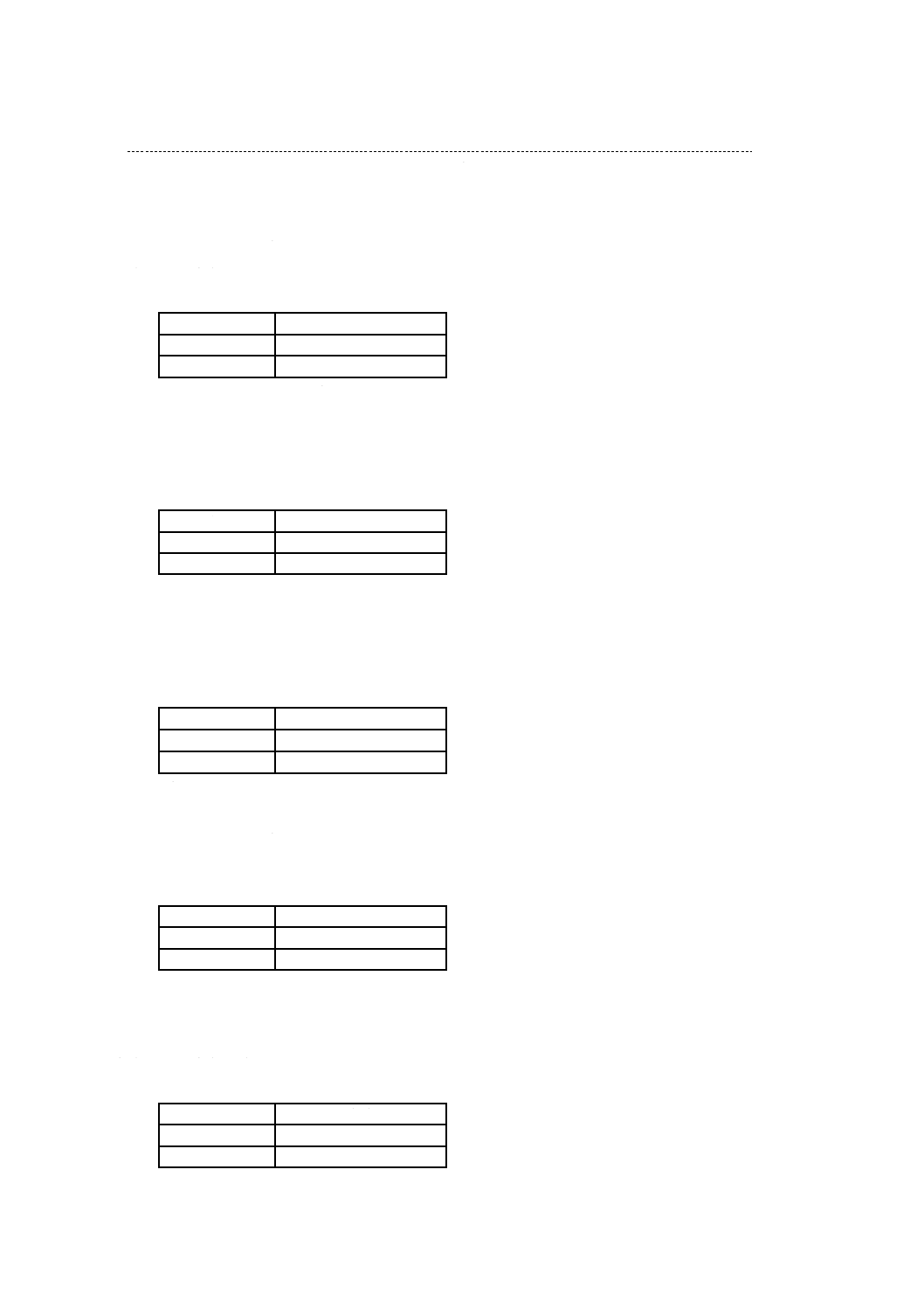
73
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注9) 適合性試験の項目のうち“ミニマムECU”の要件をクリアにしたことを意味する。
なお,A.29.6〜A.29.17まで,この注を適用する。
タイプ:
測定値
SPN:
4317
A.29.6 適合性認証タイプ−TECUクラス1
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4318
A.29.7 適合性認証タイプ−TECUクラス2
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4319
A.29.8 適合性認証タイプ−TECUクラス3
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4320
A.29.9 適合性認証タイプ−クラス3ECU
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4321
A.29.10 適合性認証タイプ−仮想端末(VT)
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
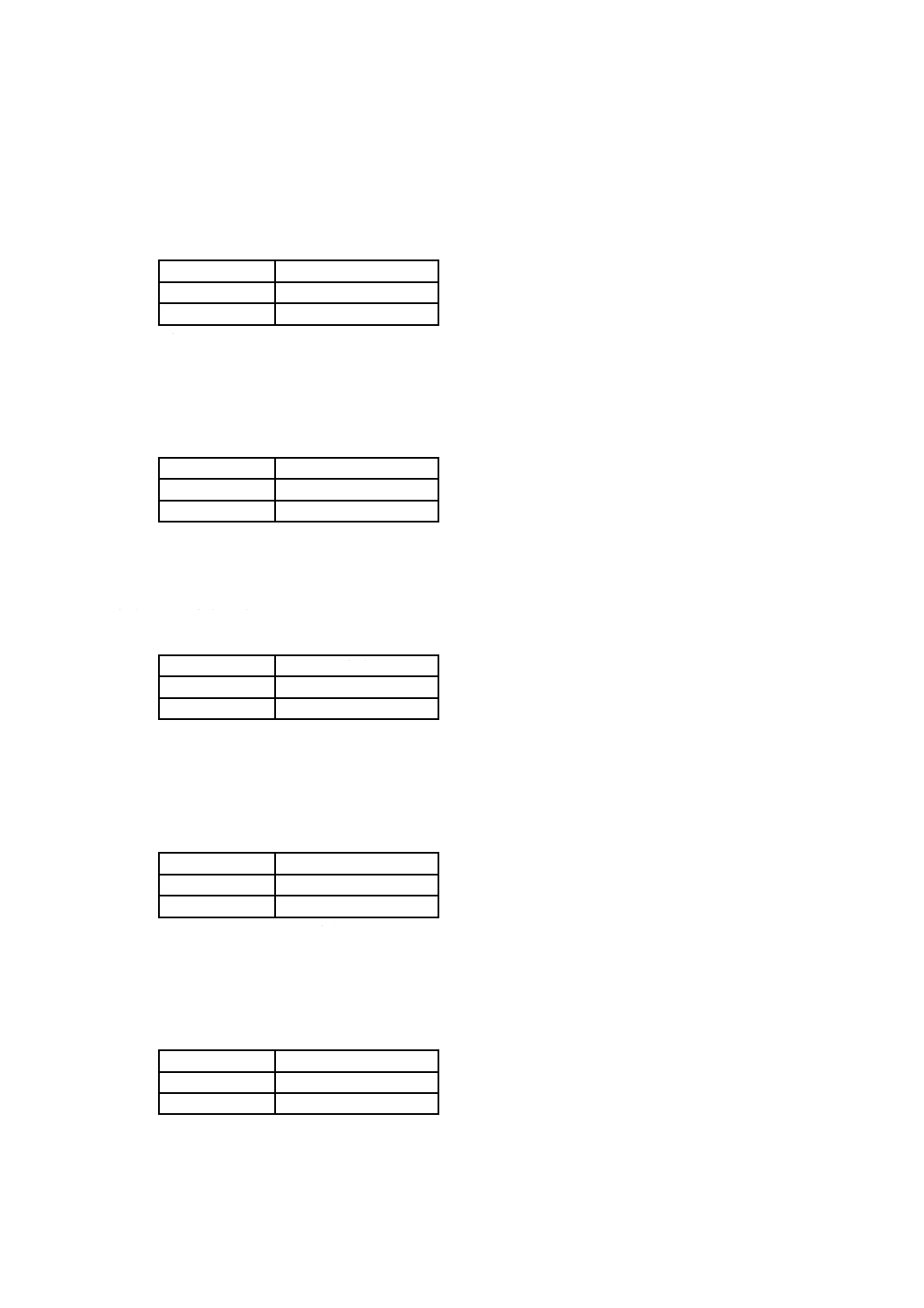
74
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
タイプ:
測定値
SPN:
4322
A.29.11 適合性認証タイプ−VTワーキングセットマスタ
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4323
A.29.12 適合性認証タイプ−VTワーキングセットメンバ
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4324
A.29.13 適合性認証タイプ−タスクコントローラTC
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4325
A.29.14 適合性認証タイプ−TCワーキングセットマスタ
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4326
A.29.15 適合性認証タイプ−TCワーキングセットメンバ
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4327
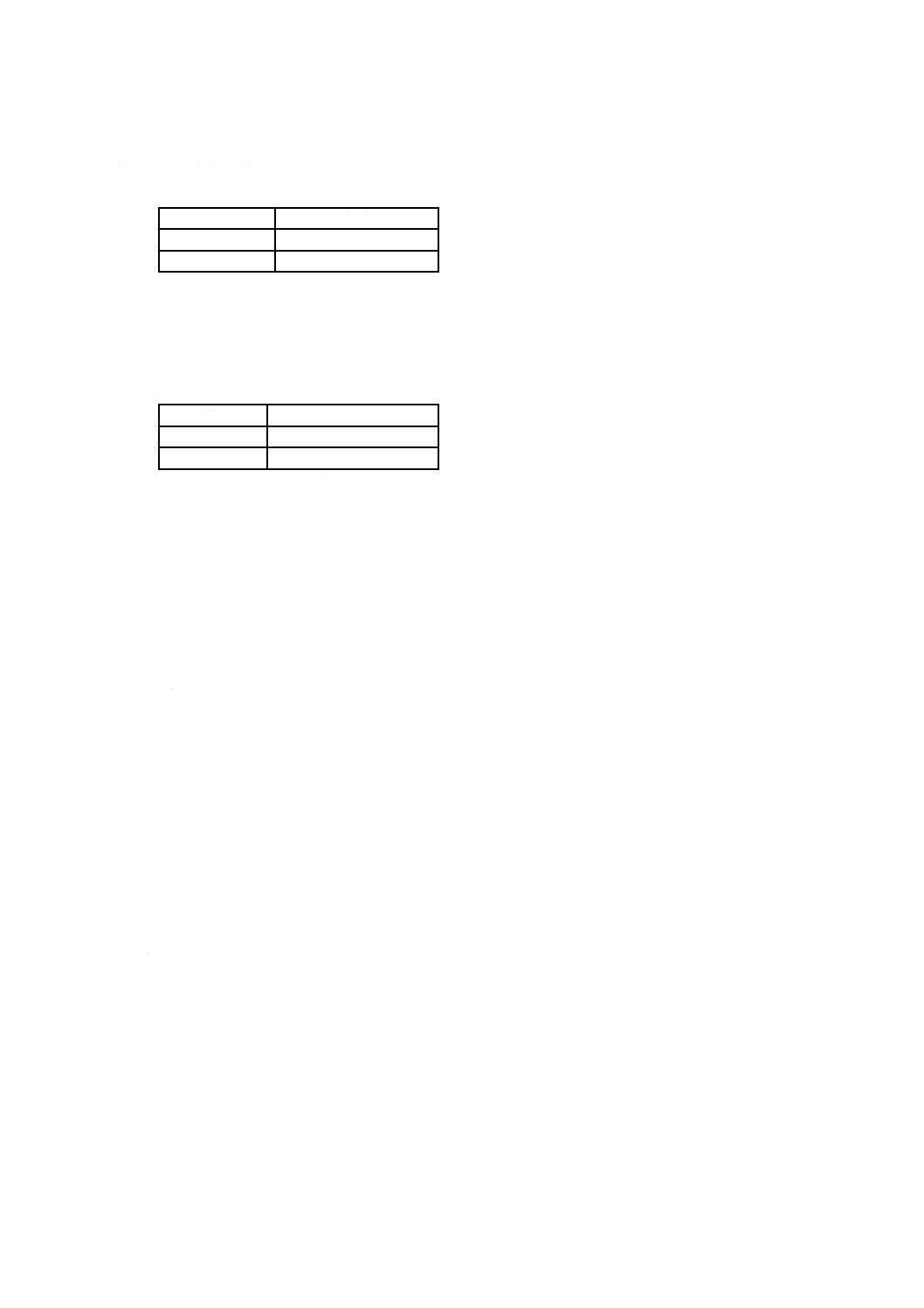
75
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.29.16 適合性認証タイプ−ファイルサーバー
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4328
A.29.17 適合性認証タイプ−GPS受信機
実施された適合性試験の種類を示すために使用するパラメータ。
データ長:
1ビット
値
意味
0
認証なし
1
認証あり
タイプ:
測定値
SPN:
4329
A.29.18 適合性認証番号
認証試験機関によって割り当てられた認証番号。この値は,認証機関の試験ファイルを個々に識別する
ために,認証試験機関ID及びECU 製造業者IDとともに使用できる。
データ長:
16ビット
分解能:
1/bit
データ範囲:
0〜64 255
タイプ:
測定値
SPN:
4330
A.30 選択された速度制御パラメータ
A.30.1 機械の選択された速度
機械によって,複数のソースから決定された現時点の速度。このパラメータは,機械が判定した最善の
機械速度を示す値で,現時点で利用できる機械速度(ホイール,対地又はナビゲーションベース)の一つ
を伝える。
データ長:
2バイト
デフォルト値:
0
分解能:
0.001 m/s/bit,上位バイト0.256 m/s/bit
オフセット:
0 m/s
データ範囲:
0〜64 255
単位:
メートル毎秒
タイプ:
測定値
SPN:
4305
A.30.2 機械の選択された距離
選択された機械速度を基準として機械が実際に走行した距離(A.30.1参照)。
距離が4 211 081.215 mを超えると,値はゼロにリセットされ,引き続き距離が増加する。
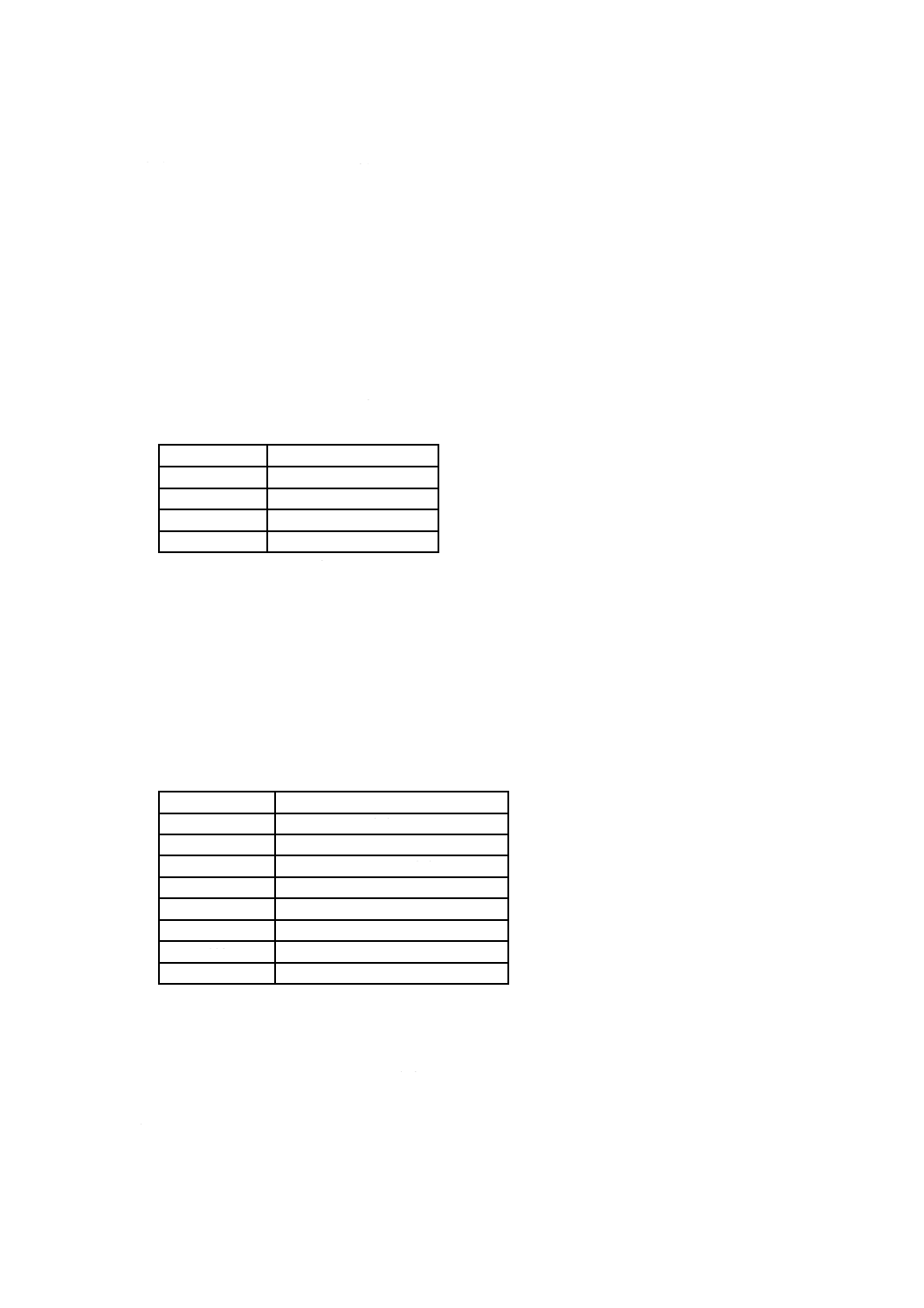
76
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
4バイト
分解能:
0.001 m/ bit
オフセット:
0 m
データ範囲:
0 m〜4 211 081.215 m
単位:
メートル
タイプ:
測定値
SPN:
4306
A.30.3 機械の選択された方向
機械が走行する現時点の方向を示す。
注記 前進及び後進は,シャーシの普通の走行方向を示す。その方向は,運転者の視点が変わっても
同じである(例えば,運転席を反転したとき)。
データ長:
2ビット
値
意味
00
後進
01
前進
10
エラー表示
11
利用不可
タイプ:
測定値
SPN:
4309
A.30.4 機械の選択された速度ソース
機械の速度パラメータの中で,現時点で報告されている速度ソースの表示(A.30.1参照)。シミュレーシ
ョン速度は,機械が実際に動いていないときに,作業機の作動を可能にするためにシステムによって生成
された速度メッセージである。混合速度は,運転者又は製造業者が選択した論理回路を基にした実際の速
度ソースの組合せを使用した,速度メッセージである。例えば,対地速度ソースが0.5 m/s未満のとき,速
度メッセージがホイール速度ソースを送るような場合に使用する。
データ長:
3ビット
値
意味
000
ホイール基準速度
001
対地速度
010
ナビゲーション基準速度
011
混合速度
100
シミュレーション速度
101
予約
110
予約
111
利用不可
タイプ:
測定値
SPN:
4308
A.30.5 機械の選択された速度設定点コマンド
選択されたソースによって測定した機械速度の指示された設定値。
データ長:
2バイト
デフォルト値:
0
分解能:
0.001 m/s/bit,上位バイト0.256 m/s/bit
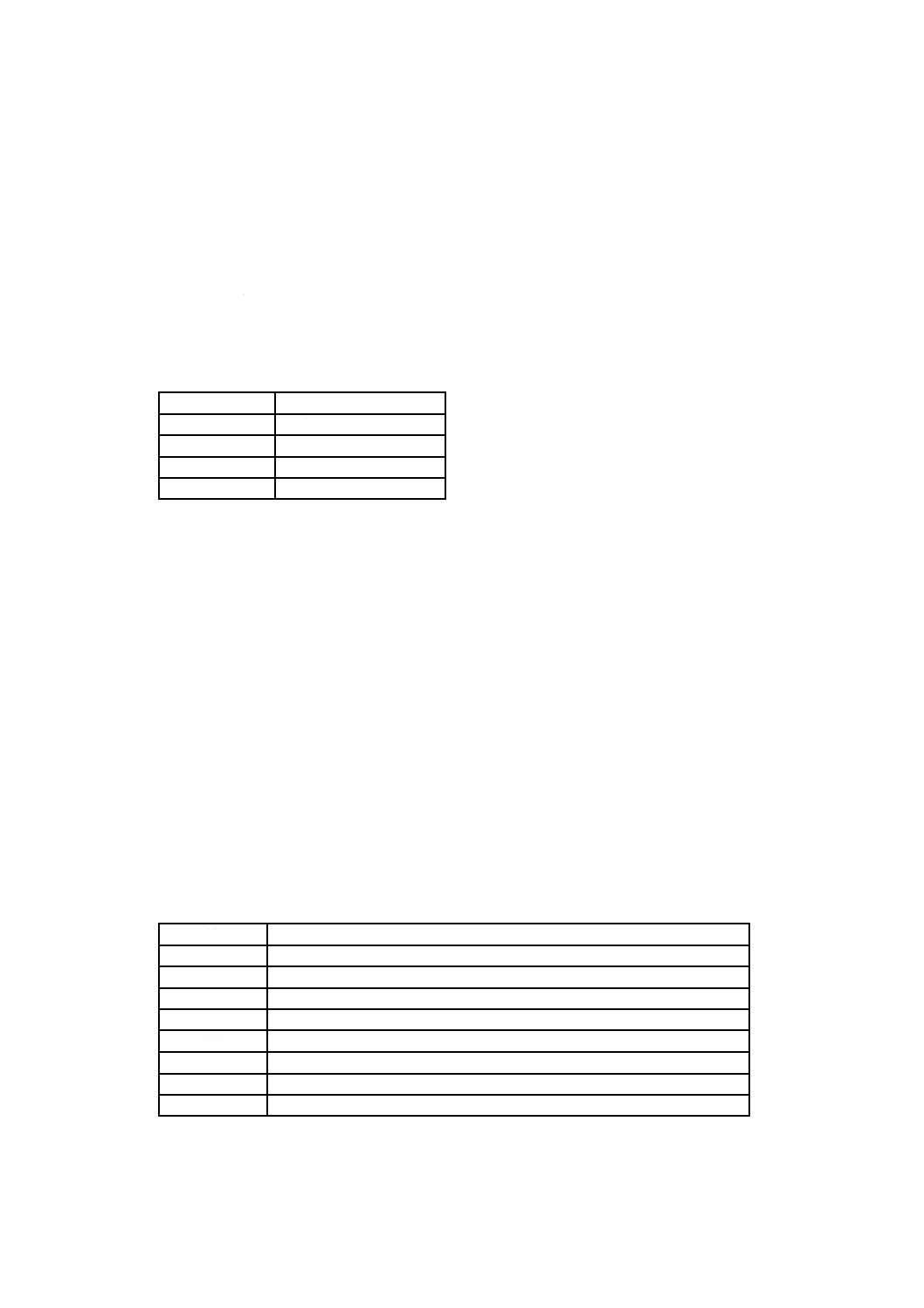
77
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
オフセット:
0 m/s
データ範囲:
0〜64 255
単位:
メートル毎秒
タイプ:
コマンド
SPN:
4310
A.30.6 機械の選択された方向コマンド
機械の指示された方向。
注記 前進及び後進は,シャーシの普通の走行方向を示す。その方向は,運転者の視点が変わっても
同じである(例えば,運転席が反転したとき)。
データ長:
2ビット
値
意味
00
後進
01
前進
10
エラー表示
11
利用不可
タイプ:
コマンド
SPN:
4312
A.30.7 機械の選択された速度の設定点の制限
機械が許容できる最高速度をトラクタへ伝えるために使用するパラメータ。
データ長:
2バイト
デフォルト値:
0
分解能:
0.001 m/s/bit,上位バイト0.256 m/s/bit
オフセット:
0 m/s
データ範囲:
0〜64 255
単位:
メートル毎秒
タイプ:
コマンド
SPN:
4311
A.30.8 機械の選択された速度制限ステータス
連続的なコマンドのパラメータに関連付けられる,トラクタECUの現時点の制限状態を伝えるために使
用するパラメータ(すなわち,過渡的/一時的/単発ではない。)。
データ長:
3ビット
値
意味
000
制限されていない状態
001
オペレータによって制限/制御されている状態(要求は実行されない。)
010
上側に制限されている状態(下方コマンドだけ有効)
011
下側に制限されている状態(上方コマンドだけ有効)
100
予約
101
予約
110
回復不能な不具合
111
利用不可(パラメータサポートなし)
制限されている状態(上表の値010及び011)は,例えば,大きな設定ポイント変更が,変化率で制限
されている場合の一時的なものであることに留意する。このビット(上表の値010及び011)は,設定値
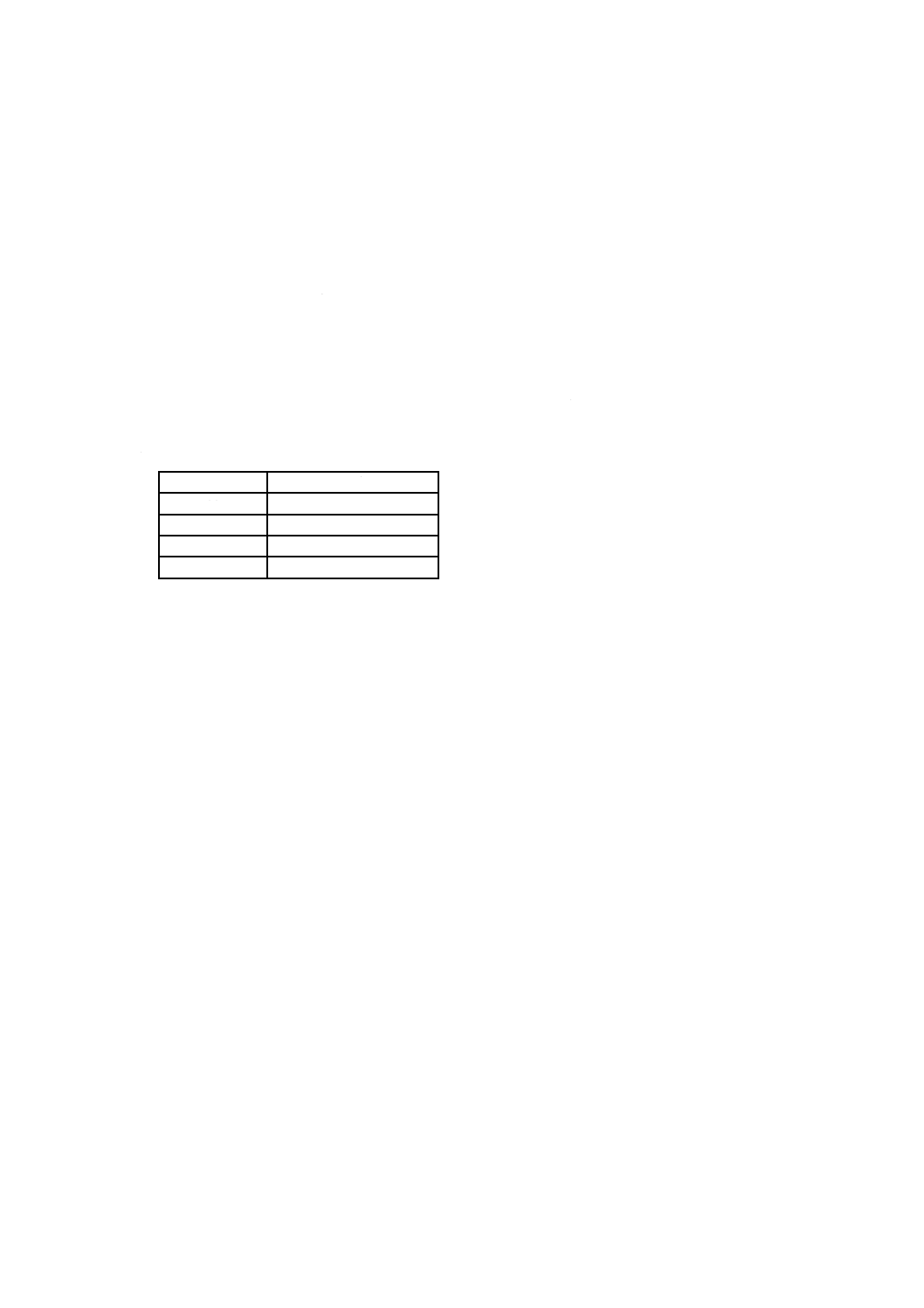
78
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に応答しようとして発生するワインドアップ(制限を超えて出力し続けること)及びそれに続くオーバシ
ュートを防止するため,変化(設定値に達するまでの出力値が変化している間)が完了するまで設定でき
る。
回復不能な不具合(上表の値110)とは,作業機側からは回復不能な状態である。トラクタ内のオペレ
ータの操作によって問題を解決し,“オペレータによって制限/制御されている状態(上表の値001)”へ
変化させることができる。
タイプ:
測定値
SPN:
4307
A.31 運転者方向の反転
このパラメータは,報告された方向は運転者の視点に対して運転席が反転しているかどうかを示す(例
えば,運転席が反転している場合,機械の前進は運転者にとって後退である。)。
データ長:
2バイト
値
意味
00
反転ではない。
01
反転である。
10
エラー表示
11
利用不可
タイプ:
コマンド
SPN:
5244
79
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
パラメータグループ
B.1
時間/日付
送信周期:
要求に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
230
デフォルト優先順位:
6
PGN:
65254 (00FEE616)
バイト1〜3:
時間(UTC)(A.1参照)
バイト4〜6:
日付(A.2参照)
バイト7:
ローカル分オフセット(A.3参照)
バイト8:
ローカル時間オフセット(A.4参照)
B.2
対地速度及び距離
建設及び農業作業機に実装するバス上のトラクタECUから通常送信し,現時点の測定された対地速度を
接続されたシステムに提供するメッセージ(距離カウンター及び進行方向の指示も含む。)。
注記 ホイール基準及び対地基準のそれぞれの精度は,速度に依存し,低速度では低下することがあ
る。ホイール基準の情報は,低速度では,100 ms周期で更新されないことがある。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
73
デフォルト優先順位:
3
PGN:
65097 (00FE4916)
バイト1,2:
対地機械速度(A.5参照)
バイト3〜6:
対地機械距離(A.6参照)
バイト7:
予約
バイト8:
ビット8〜3:
予約
ビット2,1:
対地機械方向(A.7参照)
B.3
ホイール基準速度及び距離
建設及び農業作業機に実装するバス上のトラクタECUから通常送信し,現時点のホイール基準速度を接
続されたシステムに提供するメッセージ。このメッセージには,距離カウンター,進行方向の指示,スタ
ート/ストップスイッチ及び入力の状態も含む。
80
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
点火キースイッチが切られたとき,このメッセージを送信するために,ECU̲PWR及びPWRの双方は,
2秒間追加で維持しなければならない。これは,エンジンのクランキング(始動)のときは不要である。
注記 ホイール基準及び対地基準のそれぞれの精度は,速度に依存し,低速度では低下することがあ
る。ホイール基準の情報は,低速度では,100 msで更新されないことがある。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
72
デフォルト優先順位:
3
PGN:
65096 (00FE4816)
バイト1,2:
ホイール基準の速度(A.8参照)
バイト3〜6:
ホイール基準の走行距離(A.9参照)
バイト7:
トラクタ電源の最大時間(A.12参照)
バイト8:
ビット8,7:
運転者方向の反転(A.31参照)
ビット6,5:
スタート/ストップ状態(A.25.2参照)
ビット4,3:
キースイッチの状態(A.11参照)
ビット2,1:
ホイール基準の進行方向(A.10参照)
B.4
電源の維持
点火スイッチが切れていることを示したホイール基準速度及び距離メッセージを受信した後に,トラク
タECUが2秒間電源を切らないことを要求するメッセージで,実装バスに接続した任意のECUによって
送信する。メッセージは,連結作業機の作動状態も含む。
送信周期:
点火スイッチがON状態からOFF状態に変わったメッセージの受信
後必要に応じて。又は,パラメータ状態の変化があったとき。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
71
デフォルト優先順位:
6
PGN:
65095 (00FE4716)
バイト1:
ビット8,7:
ECUの電源維持(A.13参照)
ビット6,5:
アクチュエータの電源維持(A.14参照)
ビット4〜1:
予約
バイト2:
ビット8,7:
作業機の移動状態(A.15参照)
ビット6,5:
作業機の駐車状態(A.16参照)
ビット4,3:
作業機の準備状態(A.17参照)
ビット2,1:
予約
バイト3〜8:
予約
81
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.5
ナビゲーションロケーションシステムのメッセージ
ISO 11783規格群ネットワークは,IEC 61162-3(NMEA 2000)に規定するナビゲーションロケーション
のメッセージを使用しなければならない。ISO 11783規格群の優先(最小)メッセージは,GNSS位置デー
タ,位置,急速アップデート及びGNSS擬似範囲ノイズ統計である。複数のデータフレームの必要がある
メッセージは,JIS B 9225-3に規定するトランスポートプロトコルではなく,NMEA高速パケットプロト
コルを使用しなければならない。
B.6
第二,又はフロントヒッチのステータス
現時点のフロントヒッチパラメータの測定値を提供するメッセージ。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
70
デフォルト優先順位:
3
PGN:
65094 (00FE4616)
バイト1:
フロントヒッチポジション(A.19.1参照)
バイト2:
ビット8,7:
フロントヒッチの作業中表示(A.19.5参照)
ビット6〜4:
フロントヒッチ制限ポジションのステータス(A.19.11参照)
ビット3〜1:
予約
バイト3:
公称フロントロワーリンク力(A.19.9参照)
バイト4,5:
フロントドラフト(A.19.7参照)
バイト6〜8:
予約
B.7
第一,又はリヤヒッチのステータス
現時点のリヤヒッチパラメータの測定値を提供するメッセージ。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
69
デフォルト優先順位:
3
PGN:
65093 (00FE4516)
バイト1:
リヤヒッチポジション(A.19.2参照)
バイト2:
ビット8,7:
リヤヒッチの作業中表示(A.19.6参照)
ビット6〜4:
リヤヒッチ制限ポジションのステータス(A.19.12参照)
ビット3〜1:
予約
バイト3:
公称リヤロワーリンク力(A.19.10参照)
バイト4,5:
リヤドラフト(A.19.8参照)
バイト6〜8:
予約
82
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.8
第二,又はフロントPTO出力軸
現時点の第二,又はフロントPTO出力軸パラメータの測定値を提供するメッセージ。
送信周期:
接続時100 ms,それ以外は要求に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
68
デフォルト優先順位:
3
PGN:
65092 (00FE4416)
バイト1,2:
フロントPTO出力軸の回転速度(A.20.1参照)
バイト3,4:
フロントPTO出力軸の回転速度設定点(A.20.3参照)
バイト5:
フロントPTO出力軸状態
ビット8,7:
フロントPTO入切(A.20.7参照)
ビット6,5:
フロントPTOモード(A.20.9参照)
ビット4,3:
フロントPTOエコノミーモード(A.20.11参照)
ビット2,1:
フロントPTOの接続要求ステータス(A.20.19参照)
バイト6:
ビット8,7:
フロントPTOのモード要求ステータス(A.20.20参照)
ビット6,5:
フロントPTOのエコノミーモード要求ステータス(A.20.21参照)
ビット4〜2:
フロントPTO軸回転速度の制限ステータス(A.20.22参照)
ビット1:
予約
バイト7,8:
予約
B.9
第一,又はリヤPTO出力軸
現時点の第一,又はリヤPTO出力軸パラメータの測定値を提供するメッセージ。
送信周期:
接続時100 ms,それ以外は要求に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
67
デフォルト優先順位:
3
PGN:
65091 (00FE4316)
バイト1,2:
リヤPTO出力軸の回転速度(A.20.2参照)
バイト3,4:
リヤPTO出力軸の回転速度設定点(A.20.4参照)
バイト5:
リヤPTO出力軸状態
ビット8,7:
リヤPTO入切(A.20.8参照)
ビット6,5:
リヤPTOモード(A.20.10参照)
ビット4,3:
リヤPTOエコノミーモード(A.20.12参照)
ビット2,1:
リヤPTOの接続要求ステータス(A.20.23参照)
バイト6:
ビット8,7:
リヤPTOのモード要求ステータス(A.20.24参照)
ビット6,5:
リヤPTOのエコノミーモード要求ステータス(A.20.25参照)
83
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ビット4〜2:
リヤPTO軸回転速度の制限ステータス(A.20.26参照)
ビット1:
予約
バイト7,8:
予約
B.10 ヒッチ及びPTOのコマンド
ヒッチポジション,PTO軸設定点回転速度及びPTO入切の制御を提供するメッセージ。
送信周期:
アクティブ時に100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
66
デフォルト優先順位:
3
PGN:
65090 (00FE4216)
バイト1:
フロントヒッチポジションコマンド(A.19.3参照)
バイト2:
リヤヒッチポジションコマンド(A.19.4参照)
バイト3,4:
フロントPTO出力軸の回転速度設定点コマンド(A.20.5参照)
バイト5,6:
リヤPTO出力軸の回転速度設定点コマンド(A.20.6参照)
バイト7:
PTO出力軸接続コマンド
ビット8,7:
フロントPTO入切コマンド(A.20.13参照)
ビット6,5:
リヤPTO入切コマンド(A.20.14参照)
ビット4〜1:
予約
バイト8:
ビット8,7:
フロントPTOモードコマンド(A.20.15参照)
ビット6,5:
リヤPTOモードコマンド(A.20.16参照)
ビット4,3:
フロントPTOエコノミーモードコマンド(A.20.17参照)
ビット2,1:
リヤPTOエコノミーモードコマンド(A.20.18参照)
B.11 補助バルブ0の推定流量
補助バルブ番号0の推定流量を提供するメッセージ。
注記 このバルブは,“パワービヨンド”(油圧ループ回路)制御に使用する。
送信周期:
アクティブ時に100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
16
デフォルト優先順位:
3
PGN:
65040 (00FE1016)
バイト1:
補助バルブ番号0の伸びポート推定流量(A.21.4参照)
バイト2:
補助バルブ番号0の縮みポート推定流量(A.21.5参照)
バイト3:
ビット8,7:
補助バルブ番号0のフェールセーフモード(A.21.13参照)
ビット6,5:
予約
84
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ビット4〜1:
補助バルブ番号0のバルブ状態(A.21.6参照)
バイト4:
ビット8〜6:
補助バルブ番号0の推定流量制限ステータス(A.21.15参照)
ビット5〜1:
予約
バイト5〜8:
予約
B.12 補助バルブ0の測定流量
補助バルブ番号0の測定流量を提供するメッセージ。
注記 このバルブは,“パワービヨンド”制御に使用する。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
32
デフォルト優先順位:
3
PGN:
65056 (00FE2016)
バイト1:
補助バルブ番号0の伸びポート測定流量(A.21.2参照)
バイト2:
補助バルブ番号0の縮みポート測定流量(A.21.3参照)
バイト3,4:
補助バルブ番号0の伸びポート圧力(A.21.7参照)
バイト5,6:
補助バルブ番号0の縮みポート圧力(A.21.8参照)
バイト7:
補助バルブ番号0のリターンポート圧力(A.21.9参照)
バイト8:
ビット8〜6:
補助バルブ番号0の測定流量制限ステータス(A.21.14参照)
ビット5〜1:
予約
B.13 補助バルブ0のコマンド
補助バルブ番号0を通る流量制御を提供するメッセージ。
注記 このバルブは,“パワービヨンド”制御に使用する。
送信周期:
アクティブ時に100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
48
デフォルト優先順位:
3
PGN:
65072 (00FE3016)
バイト1:
補助バルブ番号0のポート流量コマンド(A.21.10参照)
バイト2:
予約
バイト3:
ビット8,7:
補助バルブ番号0のフェールセーフモードコマンド(A.21.12参照)
ビット6,5:
予約
ビット4〜1:
補助バルブ番号0の状態コマンド(A.21.11参照)
バイト4〜8:
予約
85
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.14 補助バルブ1から14のメッセージ
ISO 11783規格群のこの規格は,補助バルブ番号0及び補助バルブ番号15のメッセージだけの定義を提
供する。バルブ番号1〜14のメッセージ定義は,B.15,B.16及びB.17で与えられるバルブ番号15と同じ
である。バルブ番号以外のデータは同一である。これらのバルブメッセージ各々のPGNは,次のとおりで
ある。
A.21.16参照
補助バルブ1推定流量
65041 (00FE1116)
補助バルブ1測定流量
65057 (00FE2116)
補助バルブ1コマンド
65073 (00FE3116)
補助バルブ2推定流量
65042 (00FE1216)
補助バルブ2測定流量
65058 (00FE2216)
補助バルブ2コマンド
65074 (00FE3216)
補助バルブ3推定流量
65043 (00FE1316)
補助バルブ3測定流量
65059 (00FE2316)
補助バルブ3コマンド
65075 (00FE3316)
補助バルブ4推定流量
65044 (00FE1416)
補助バルブ4測定流量
65060 (00FE2416)
補助バルブ4コマンド
65076 (00FE3416)
補助バルブ5推定流量
65045 (00FE1516)
補助バルブ5測定流量
65061 (00FE2516)
補助バルブ5コマンド
65077 (00FE3516)
補助バルブ6推定流量
65046 (00FE1616)
補助バルブ6測定流量
65062 (00FE2616)
補助バルブ6コマンド
65078 (00FE3616)
補助バルブ7推定流量
65047 (00FE1716)
補助バルブ7測定流量
65063 (00FE2716)
補助バルブ7コマンド
65079 (00FE3716)
補助バルブ8推定流量
65048 (00FE1816)
補助バルブ8測定流量
65064 (00FE2816)
補助バルブ8コマンド
65080 (00FE3816)
補助バルブ9推定流量
65049 (00FE1916)
補助バルブ9測定流量
65065 (00FE2916)
補助バルブ9コマンド
65081 (00FE3916)
補助バルブ10推定流量
65050 (00FE1A16)
補助バルブ10測定流量
65066 (00FE2A16)
補助バルブ10コマンド
65082 (00FE3A16)
補助バルブ11推定流量
65051 (00FE1B16)
補助バルブ11測定流量
65067 (00FE2B16)
補助バルブ11コマンド
65083 (00FE3B16)
補助バルブ12推定流量
65052 (00FE1C16)
86
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
補助バルブ12測定流量
65068 (00FE2C16)
補助バルブ12コマンド
65084 (00FE3C16)
補助バルブ13推定流量
65053 (00FE1D16)
補助バルブ13測定流量
65069 (00FE2D16)
補助バルブ13コマンド
65085 (00FE3D16)
補助バルブ14推定流量
65054 (00FE1E16)
補助バルブ14測定流量
65070 (00FE2E16)
補助バルブ14コマンド
65086 (00FE3E16)
B.15 補助バルブ15の推定流量
補助バルブ番号15の推定流量を提供するメッセージ。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
31
デフォルト優先順位:
3
PGN:
65055 (00FE1F16)
バイト1:
補助バルブ番号15の伸びポート推定流量(A.21.19参照)
バイト2:
補助バルブ番号15の縮みポート推定流量(A.21.20参照)
バイト3:
ビット8,7:
補助バルブ番号15のフェールセーフモード(A.21.28参照)
ビット6,5:
予約
ビット4〜1:
補助バルブ番号15のバルブ状態(A.21.21参照)
バイト4:
ビット8〜6:
補助バルブ番号15の推定流量制限ステータス(A.21.30参照)
ビット5〜1:
予約
バイト5〜8:
予約
B.16 補助バルブ15の測定流量
補助バルブ番号15の測定値を提供するメッセージ。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
47
デフォルト優先順位:
3
PGN:
65071 (00FE2F16)
バイト1:
補助バルブ番号15の伸びポート測定流量(A.21.17参照)
バイト2:
補助バルブ番号15の縮みポート測定流量(A.21.18参照)
バイト3,4:
補助バルブ番号15の伸びポート圧力(A.21.22参照)
バイト5,6:
補助バルブ番号15の縮みポート圧力(A.21.23参照)
87
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト7:
補助バルブ番号15のリターンポート圧力(A.21.24参照)
バイト8:
ビット8〜6:
補助バルブ番号15の測定流量制限ステータス(A.21.29参照)
ビット5〜1:
予約
B.17 補助バルブ15のコマンド
補助バルブ番号15を通る流量の制御を提供するメッセージ。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
63
デフォルト優先順位:
3
PGN:
65087 (00FE3F16)
バイト1:
補助バルブ番号15のポート流量コマンド(A.21.25参照)
バイト2:
予約
バイト3:
ビット8,7:
補助バルブ番号15のフェールセーフモードコマンド(A.21.27参照)
ビット6,5:
予約
ビット4〜1:
補助バルブ番号15の状態コマンド(A.21.26参照)
バイト4〜8:
予約
B.18 照明コマンド
トラクタから,トラクタ及び装着された作業機上にある全照明コントローラへのグローバルメッセージ。
トラクタ及び作業機の作業灯及び走行灯には,別々のパラメータが提供される。特殊な作業機の要求を
満たすために,作業機上のオプション灯3個に追加コマンドを提供する。共通の形及び信号パラメータが
提供される。
このメッセージは,全照明ファンクションの状態を制御するために使用する。それは,照明器具各々の
状態変化又は方向指示灯及びハザードランプの同期を周期的な率で提供するときに送られる。状態の値は,
点灯するか消灯するかで示す。点滅は,状態を交互に点灯又は消灯する照明メッセージを送り,行われる。
照明コマンドメッセージは,少なくとも1秒に1回は送られなければならない。トラクタが使用される国
又は通気の法令を満たし,正しい照明灯コマンド組合せを提供するのは,トラクタ設計者の責任である。
送信周期:
照明灯がON/OFF変化したとき。メッセージ間は最大1秒。全照明
灯で1秒当たり10メッセージより多くてはならない。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
65
デフォルト優先順位:
3
PGN:
65089 (00FE4116)
バイト1:
ビット8,7:
ハイビームヘッドライトコマンド(A.22.1参照)
ビット6,5:
ロービームヘッドライトコマンド(A.22.3参照)
88
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ビット4,3:
代替ヘッドライトコマンド(A.22.5参照)
ビット2,1:
日中走行ライトコマンド(A.22.61参照)
バイト2:
ビット8,7:
左折方向指示灯コマンド(A.22.21参照)
ビット6,5:
右折方向指示灯コマンド(A.22.23参照)
ビット4,3:
回転灯コマンド(A.22.39参照)
ビット2,1:
トラクタフロントフォグライトコマンド(A.22.41参照)
バイト3:
ビット8,7:
左制動灯コマンド(A.22.25参照)
ビット6,5:
右制動灯コマンド(A.22.27参照)
ビット4,3:
中央制動灯コマンド(A.22.29参照)
ビット2,1:
後退灯及び後退警音器コマンド(A.22.51参照)
バイト4:
ビット8,7:
トラクタの標識(ポジション)灯コマンド(A.22.31参照)
ビット6,5:
作業機の標識(ポジション)灯コマンド(A.22.33参照)
ビット4,3:
トラクタのクリアランス灯コマンド(A.22.35参照)
ビット2,1:
作業機のクリアランス灯コマンド(A.22.37参照)
バイト5:
ビット8,7:
トラクタのリヤハイマウント作業灯コマンド(A.22.15参照)
ビット6,5:
トラクタのリヤローマウント作業灯コマンド(A.22.13参照)
ビット4,3:
トラクタの下側作業灯コマンド(A.22.11参照)
ビット2,1:
リヤフォグライトコマンド(A.22.43参照)
バイト6:
ビット8,7:
トラクタのフロントハイマウント作業灯コマンド(A.22.9参照)
ビット6,5:
トラクタのフロントローマウント作業灯コマンド(A.22.7参照)
ビット4,3:
トラクタのサイドハイマウント作業灯コマンド(A.22.19参照)
ビット2,1:
トラクタのサイドローマウント作業灯コマンド(A.22.17参照)
バイト7:
ビット8,7:
作業機左前方作業灯コマンド(A.22.53参照)
ビット6,5:
作業機右前方作業灯コマンド(A.22.55参照)
ビット4,3:
作業機OEMオプションライト1コマンド(A.22.47参照)
ビット2,1:
作業機OEMオプションライト2コマンド(A.22.49参照)
バイト8:
ビット8,7:
作業機リヤ作業灯コマンド(A.22.45参照)
ビット6,5:
作業機左向き作業灯コマンド(A.22.57参照)
ビット4,3:
作業機右向き作業灯コマンド(A.22.59参照)
ビット2,1:
照明データメッセージ要求コマンド(A.22.63参照)
B.19 照明データ
照明コマンドメッセージ内の照明データ要求に対する応答。
トラクタ及び装着された作業機上の各照明コントローラは,要求時,このメッセージをトラクタECU
へ送信しなければならない。トラクタはこの情報を,どの照明システムが機能しているかを判断するため
に使用する。ランプ検知機能をもつ照明コントローラは,電球不良も伝えなければならない。
注記 これは,多くの国又は地域での法的要件である。
送信周期:
要求に応じて
データ長:
8バイト
データページ:
0
89
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PDUフォーマット:
254
PDU特性:
64
デフォルト優先順位:
6
PGN:
65088 (00FE4016)
バイト1:
ビット8,7:
ハイビームヘッドライト(A.22.2参照)
ビット6,5:
ロービームヘッドライト(A.22.4参照)
ビット4,3:
代替ヘッドライト(A.22.6参照)
ビット2,1:
日中走行ライト(A.22.62参照)
バイト2:
ビット8,7:
左折方向指示灯(A.22.22参照)
ビット6,5:
右折方向指示灯(A.22.24参照)
ビット4,3:
回転灯(A.22.40参照)
ビット2,1:
トラクタフロントフォグライト(A.22.42参照)
バイト3:
ビット8,7:
左制動灯(A.22.26参照)
ビット6,5:
右制動灯(A.22.28参照)
ビット4,3:
中央制動灯(A.22.30参照)
ビット2,1:
後退灯及び後退警音器(A.22.52参照)
バイト4:
ビット8,7:
トラクタの標識(ポジション)灯(A.22.32参照)
ビット6,5:
作業機の標識(ポジション)灯(A.22.34参照)
ビット4,3:
トラクタのクリアランス灯(A.22.36参照)
ビット2,1:
作業機のクリアランス灯(A.22.38参照)
バイト5:
ビット8,7:
トラクタのリヤハイマウント作業灯(A.22.16参照)
ビット6,5:
トラクタのリヤローマウント作業灯(A.22.14参照)
ビット4,3:
トラクタの下側取付け作業灯(A.22.12参照)
ビット2,1:
リヤフォグライト(A.22.44参照)
バイト6:
ビット8,7:
トラクタのフロントハイマウント作業灯(A.22.10参照)
ビット6,5:
トラクタのフロントローマウント作業灯(A.22.8参照)
ビット4,3:
トラクタのサイドハイマウント作業灯(A.22.20参照)
ビット2,1:
トラクタのサイドローマウント作業灯(A.22.18参照)
バイト7:
ビット8,7:
作業機左前方作業灯(A.22.54参照)
ビット6,5:
作業機右前方作業灯(A.22.56参照)
ビット4,3:
作業機OEMオプションライト1(A.22.48参照)
ビット2,1:
作業機OEMオプションライト2(A.22.50参照)
バイト8:
ビット8,7:
作業機リヤ作業灯(A.22.46参照)
ビット6,5:
作業機左向き作業灯(A.22.58参照)
ビット4,3:
作業機右向き作業灯(A.22.60参照)
ビット2,1:
予約
B.20 バックグラウンド照明レベル−コマンド
計器,スイッチなど,全バックグラウンド照明機能の状態を制御するために使用するメッセージ。
バックグラウンド照明レベルの変更ごとに,最大5秒間のメッセージ間隔で送信しなければならない。
90
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
送信周期:
バックグラウンド照明レベルの変更で,メッセージ間隔は最大5秒
データ長:
8バイト
データページ:
0
PDUフォーマット:
208
PDU特性:
DA
デフォルト優先順位:
3
PGN:
53248 (00D00016)
バイト1:
バックグラウンド照明レベルコマンド(A.22.64参照)
バイト2〜8:
予約
B.21 言語コマンド
接続されているシステムで使用する言語,日付,時刻フォーマットと測定単位とを,ISO 11783規格群
によって構成されたバス上の全てのECUに通知するために送信するグローバルメッセージ。
システムが電源起動及びアドレスクレームを完了した後,仮想端末(以下,VTという。)は,このメッ
セージを送信しなければならない。希望の言語が作業機ECUにサポートされない場合,デフォルト言語は,
接続システムで使用するために,トラクタECUと接続されたVTに,格納されなければならない。VTは,
接続された作業機又は作業機の組合せのサポート言語のリストを表示し,このリストから言語を選択する
方法を,オペレータに提供しなければならない。工場出荷時のVTのようにオペレータが言語を選択して
いない場合は,VTはトラクタECUからデフォルト言語を要求し,それをVTのデフォルト言語として格
納する。オペレータが一度言語を設定すれば,VTの言語メッセージは,常にトラクタECUデフォルト言
語よりも優先する。オペレータの選択した言語は,トラクタECU,接続されたVT,又はその両方に格納
されなければならない。その言語は,接続されたシステムの次回電源投入時に使わなければならない。
送信周期:
システムの初期化及び要求に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
15
デフォルト優先順位:
6
PGN:
65039 (00FE0F16)
バイト1,2:
言語コード(A.23.1参照)
バイト3:
番号フォーマット
ビット8,7:
小数点記号(A.23.2参照)
ビット6,5:
時間フォーマット(A.23.4参照)
ビット4〜1:
予約
バイト4:
日付フォーマット(A.23.3参照)
バイト5:
測定値の単位
ビット8,7:
距離単位(A.23.5.2参照)
ビット6,5:
面積単位(A.23.5.3参照)
ビット4,3:
体積単位(A.23.5.4参照)
ビット2,1:
質量単位(A.23.5.5参照)
91
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト6:
測定値の単位
ビット8,7:
温度単位(A.23.5.6参照)
ビット6,5:
圧力単位(A.23.5.7参照)
ビット4,3:
力の単位(A.23.5.8参照)
ビット2,1:
単位系(A.23.5.9参照)
バイト7,8:
予約
B.22 可変送信周期
B.22.1 送信周期の要求
メッセージ利用者が,システムに必要なバス帯域幅を合わせることを許可するメッセージ。
特定PGNをもつメッセージ利用者は,特定の希望する送信周期を要求できる。これには,デフォルト送
信周期(000016の値で要求できる。)も含まれる。要求されたPGNをもつメッセージの送信元が,要求す
る送信周期でメッセージ配信が可能な場合,要求は履行する。
ネットワーク上の全てのECUは,バス上のこのメッセージを監視する必要はない。固定タイミング制御
ループを必要とするほかのECUは,要求された送信周期を使用できないか,又は使用しない場合には,こ
のメッセージを無視してもよい。送信周期の変更を要求したリクエスタは,この要求メッセージの送信後
250 ms待たなければならない。また,送信周期に関する応答メッセージが受信されない場合は,リクエス
タは要求が受けられなかったとみなさなければならない。要求されたPGNの全ての送信元で,新しい送信
周期を受け入れようとするものは,送信周期に関する応答を送信し,新しい送信周期に切り替える前に250
ms待たなければならない。要求されたPGNの送信元が,違う送信周期の要求を受けて250 ms以内に0000
の送信周期で受信した場合は,デフォルト送信周期を使用しなければならない。
送信周期:
要求に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
204
PDU特性:
DA
デフォルト優先順位:
6
PGN:
52224 (00CC0016)
バイト1〜3:
送信周期を要求されたPGN(JIS B 9225-3参照)
バイト4,5:
送信周期コマンド(A.23.6参照)
バイト6〜8:
予約
B.22.2 送信周期の応答
送信周期の変更を要求したリクエスタに応答するグローバルメッセージ。
注記 データフィールドは要求メッセージと同じであるが,送信周期は送信者の実際値である。
送信周期:
要求に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
14
デフォルト優先順位:
6
92
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PGN:
65038 (00FE0E16)
バイト1〜3:
要求PGN
バイト4,5:
送信周期(A.23.7参照)
バイト6〜8:
要求と同じ
B.23 ワーキングセットマスタ
B.23.1 一般
ワーキングセットマスタによって送信され,セット内に何個のメンバがあるかを識別するメッセージ。
マスタは,メンバ数として合計に含まれる。このメッセージのSAは,マスタのNAMEに関連付けられ
て使われることが望ましい。また,特定のワーキングセットは,それらのマスタのNAMEによって識別で
きる。
送信周期:
必要に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
13
デフォルト優先順位:
7
PGN:
65037 (00FE0D16)
バイト1:
ワーキングセットのメンバ数(A.24.1参照)
バイト2〜8:
予約
B.23.2 ワーキングセットメンバ
ワーキングセットマスタによって送信され,特定ワーキングセットの個別メンバを識別するメッセージ
(マスタのSAで,特定のワーキングセットを識別する。)。
様々な特定ワーキングセットマスタが送信するメッセージは,多数ある。そのメッセージ数は,ワーキ
ングセットのメンバ数より一つ少ない。マスタのNAMEを識別するにはメッセージは必要がない。これは,
マスタのアドレスクレームから得ることができる。このメッセージ構造では,あるワーキングセットのメ
ンバ全てを識別できるように,ワーキングセットと通信しているユニットが,ワーキングセットメンバ数
分のメッセージを適切に受け取ったかどうか検証する必要がある。
送信周期:
必要に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
12
デフォルト優先順位:
7
PGN:
65036 (00FE0C16)
バイト1〜8:
このワーキングセットの特定メンバのNAMEは,メンバの要求され
たSAで識別する(A.24.2参照)。
93
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.24 トラクタの制御メッセージ
B.24.1 トラクタの制御モードコマンド
タスクコントローラ,又は作業機からトラクタECUへのメッセージ。
二つのコマンドがこの単一メッセージ内にグループ化する。コマンドモードの多くは互いに干渉せず,
それらに応じてグループ分けする。
送信周期:
デフォルトは100 msで,最大値は,閉ループクルーズ制御を行うた
めに10 msである。スリップ制御機能の設定については,送信周期
は1秒から10秒の間で状態が変更されたときに要求する。15秒経
過しても更新がない場合は,トラクタECUはスリップ制御なしに移
行する。
注記 対応国際規格では,“1s in 10s”となっており,本来は“10秒で1秒”と訳するのがよいが,実
際は,“1 s to 10s”であるので“1秒から10秒”であると訳した。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
11
デフォルト優先順位:
3
PGN:
65035 (00FE0B16)
バイト1:
ビット8〜4:
トラクタの制御モードコマンド番号1(A.26.2.1参照)
ビット3〜1:
予約
バイト2:
ビット8〜4:
トラクタの制御モードコマンド番号2(A.26.2.1参照)
ビット3〜1:
予約
バイト3,4:
トラクタの制御コマンド値番号1(A.26.3参照)
バイト5:
トラクタの制御制限コマンド番号1(A.26.8参照)
バイト6,7:
トラクタの制御コマンド値番号2(A.26.3参照)
バイト8:
トラクタの制御制限コマンド番号2(A.26.8参照)
B.24.2 トラクタの制御コマンドのトラクタ応答
送信周期:
全てのコマンド受信時
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
10
デフォルト優先順位:
3
PGN:
65034 (00FE0A16)
バイト1:
ビット8〜4:
トラクタの制御モード応答番号1(A.26.4参照)
ビット3〜1:
トラクタの制御制限ステータス番号1(A.26.7参照)
バイト2:
ビット8〜4:
トラクタの制御モード応答番号2(A.26.4参照)
ビット3〜1:
トラクタの制御制限ステータス番号2(A.26.7参照)
バイト3,4:
トラクタの制御値応答番号1(A.26.5参照)
バイト5:
トラクタの制御制限番号1(A.26.6参照)
94
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト6,7:
トラクタの制御値応答番号2(A.26.5参照)
バイト8:
トラクタの制御制限番号2(A.26.6参照)
B.24.3 トラクタの機能応答メッセージ
トラクタクラス及び機能に対するタスクコントローラ又は作業機ECUへの要求に対するトラクタの応
答。
送信周期:
電源投入時,及び要求受信時
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
9
デフォルト優先順位:
3
PGN:
65033 (00FE0916)
バイト1:
トラクタクラス
ビット8,7:
トラクタクラス(A.27.4参照)
クラス 1機能
ビット6:
電源管理−キースイッチ(A.27.5参照)
ビット5:
電源管理−トラクタ電源最大時間(A.27.5参照)
ビット4:
電源管理−電源維持(A.27.5参照)
ビット3:
速度情報−ホイール基準速度(A.27.5参照)
ビット2:
速度情報−対地速度(A.27.5参照)
ビット1:
速度情報−エンジン回転速度(A.27.5参照)
バイト2:
ビット8:
ヒッチ情報−リヤポジション(A.27.5参照)
ビット7:
ヒッチ情報−リヤ作業位置(A.27.5参照)
ビット6:
PTO情報−リヤ軸回転速度(A.27.5参照)
ビット5:
PTO情報−リヤ軸接続(A.27.5参照)
ビット4:
灯火−既存トレーラコネクタ信号セット(A.27.5参照)
ビット3:
トラクタECUの言語コマンド格納(A.27.5参照)
ビット2:
予約−ゼロ設定(0)
ビット1:
予約−ゼロ設定(0)
クラス 2機能
バイト3:
ビット8:
時間日付(A.27.5参照)
ビット7:
速度及び距離−対地距離(A.27.5参照)
ビット6:
速度及び距離−対地進行方向(A.27.5参照)
ビット5:
速度及び距離−ホイール基準距離(A.27.5参照)
ビット4:
速度及び距離−ホイール基準方向(A.27.5参照)
ビット3:
追加ヒッチパラメータ−リヤけん引(A.27.5参照)
ビット2:
灯火−全作業機灯火メッセージ設定(A.27.5参照)
ビット1:
推定又は測定補助バルブステータス(A.27.5参照)
クラス 3機能
バイト4:
ビット8:
ヒッチコマンド−リヤヒッチポジション(A.27.5参照)
95
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ビット7:
PTOコマンド−リヤPTO回転速度コマンド(A.27.5参照)
ビット6:
PTOコマンド−リヤPTO接続コマンド(A.27.5参照)
ビット5:
補助バルブコマンド(A.27.5参照)
ビット4:
制限/要求ステータス報告(A.27.5参照)
ビット3〜1:
予約−ゼロ設定(0)
拡張子N
バイト5:
ビット8:
ナビゲーションシステム高頻度位置(A.27.5参照)
ビット7:
ナビゲーションシステム位置データ(A.27.5参照)
ビット6:
ナビゲーション擬似距離誤差統計(A.27.5参照)
ビット5:
予約−ゼロ設定(0)
ビット4:
オペレータ外部灯火制御(A.27.5参照)
ビット3:
選択速度(A.27.5参照)
ビット2:
選択速度制御(A.27.5参照)
ビット1:
方向制御(A.27.5参照)
拡張子F
バイト6:
ビット8:
ヒッチ情報−フロントポジション(A.27.5参照)
ビット7:
ヒッチ情報−フロント作業位置(A.27.5参照)
ビット6:
PTO情報−フロント軸回転速度(A.27.5参照)
ビット5:
PTO情報−フロント軸接続(A.27.5参照)
ビット4:
追加ヒッチパラメータ−フロントドラフト(A.27.5参照)
ビット3:
ヒッチコマンド−フロントヒッチポジション(A.27.5参照)
ビット2:
PTOコマンド−フロントPTO回転速度コマンド(A.27.5参照)
ビット1:
PTOコマンド−フロントPTO接続コマンド(A.27.5参照)
バイト7:
予約−ゼロ設定(0)
バイト8:
ビット8〜2:
予約−ゼロ設定(0)
ビット1:
予約ビット指示値−予約ビットが0に設定されていることを示すた
め,ゼロ(0)に設定する(A.27.6参照)。
注記1 バイト8/ビット1を“1”に設定する場合,それ以下のビットは“予約”とみなす必要がある。
バイト2,ビット1,2
バイト4,ビット1〜4
バイト5,ビット1〜5
バイト7,ビット1〜8
バイト8,ビット2〜8
注記2 新しい機能のサポートを,“1”で表示するために,予約ビットは“0”に設定するのが望まし
い。この規格の旧バージョンでは,このことに言及していないので,通例として予約ビット
を“1”で設定した。
B.24.4 トラクタ機能要求メッセージ
希望するトラクタクラス及びトラクタ機能に関する,作業機ECU,又はタスクコントローラからトラク
タECUへの要求。
送信周期:
必要に応じて
96
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
8
デフォルト優先順位:
3
PGN:
65032 (00FE0816)
トラクタクラス
バイト1:
ビット8,7:
トラクタECUクラス要求(A.27.2参照)
クラス1機能
ビット6:
電源管理−キースイッチ(A.27.3参照)
ビット5:
電源管理−トラクタ電源最大時間(A.27.3参照)
ビット4:
電源管理−電源維持(A.27.3参照)
ビット3:
速度情報−ホイール基準速度(A.27.3参照)
ビット2:
速度情報−対地速度(A.27.3参照)
ビット1:
速度情報−エンジン回転速度(A.27.3参照)
バイト2:
ビット8:
ヒッチ情報−リヤポジション(A.27.3参照)
ビット7:
ヒッチ情報−リヤ作業位置(A.27.3参照)
ビット6:
PTO情報−リヤ軸回転速度(A.27.3参照)
ビット5:
PTO情報−リヤ軸接続(A.27.3参照)
ビット4:
灯火−既存トレーラコネクタ信号セット(A.27.3参照)
ビット3:
トラクタECUの言語コマンド格納(A.27.3参照)
ビット2:
予約−ゼロ設定(0)
ビット1:
予約−ゼロ設定(0)
クラス2機能
バイト3:
ビット8:
時間日付(A.27.3参照)
ビット7:
速度及び距離−対地距離(A.27.3参照)
ビット6:
速度及び距離−対地進行方向(A.27.3参照)
ビット5:
速度及び距離−ホイール基準距離(A.27.3参照)
ビット4:
速度及び距離−ホイール基準方向(A.27.3参照)
ビット3:
追加ヒッチパラメータ−リヤけん引(A.27.3参照)
ビット2:
灯火−全作業機灯火メッセージ設定(A.27.3参照)
ビット1:
推定又は測定補助バルブステータス(A.27.3参照)
クラス3機能
バイト4:
ビット8:
ヒッチコマンド−リヤヒッチポジション(A.27.3参照)
ビット7:
PTOコマンド−リヤPTO回転速度コマンド(A.27.3参照)
ビット6:
PTOコマンド−リヤPTO接続コマンド(A.27.3参照)
ビット5:
補助バルブコマンド(A.27.3参照)
ビット4:
制限/要求ステータス報告(A.27.3参照)
ビット3〜1:
予約−ゼロ設定(0)
拡張子N
97
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト5:
ビット8:
ナビゲーションシステム高頻度位置(A.27.3参照)
ビット7:
ナビゲーションシステム位置データ(A.27.3参照)
ビット6:
ナビゲーション擬似距離誤差統計(A.27.3参照)
ビット5:
予約−ゼロ設定(0)
ビット4:
オペレータ外部灯火制御(A.27.3参照)
ビット3:
選択速度(A.27.3参照)
ビット2:
選択速度制御(A.27.3参照)
ビット1:
方向制御(A.27.3参照)
拡張子F
バイト6:
ビット8:
ヒッチ情報−フロントポジション(A.27.3参照)
ビット7:
ヒッチ情報−フロント作業位置(A.27.3参照)
ビット6:
PTO情報−フロント軸回転速度(A.27.3参照)
ビット5:
PTO情報−フロント軸接続(A.27.3参照)
ビット4:
追加ヒッチパラメータ−フロントけん引(A.27.3参照)
ビット3:
ヒッチコマンド−フロントヒッチポジション(A.27.3参照)
ビット2:
PTOコマンド−フロントPTO回転速度コマンド(A.27.3参照)
ビット1:
PTOコマンド−フロントPTO接続コマンド(A.27.3参照)
バイト7:
予約−ゼロ設定(0)
バイト8:
ビット8〜2:
予約−ゼロ設定(0)
ビット1:
予約ビット指示値−予約ビットが0に設定されていることを示すた
め,ゼロ(0)に設定する(A.27.6参照)。
注記1 バイト8/ビット1を“1”に設定する場合,それ以下のビットは“予約”とみなす必要がある。
バイト2,ビット1,2
バイト4,ビット1〜4
バイト5,ビット1〜5
バイト7,ビット1〜8
バイト8,ビット2〜8
注記2 新しい機能のサポートを,“1”で表示するために,予約ビットは“0”に設定するのが望まし
い。この規格の旧バージョンでは,このことに言及していないので,通例として予約ビット
を“1”で設定した。
B.25 汎用バルブメッセージ
B.25.1 一般
汎用バルブのメッセージは,ISO 11783規格群ネットワークと接続されたコントローラ組込みの油圧バ
ルブ用である。それらは,ECU又はマスタとしてのTECUをもつワーキングセットか,作業機バス上で通
信している閉じた系か,いずれかを通じて作業機バス上のコントローラと結合する閉じた系で使用する。
B.25.2 汎用バルブの推定流量
このメッセージは,汎用バルブの推定流量を提供する。
送信周期:
100 ms
データ長:
8バイト
98
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データページ:
0
PDUフォーマット:
198
PDU特性:
DA
デフォルト優先順位:
3
PGN:
50688 (00C60016)
バイト1:
汎用バルブ伸びポートの推定流量(A.21.33参照)
バイト2:
汎用バルブ縮みポートの推定流量(A.21.34参照)
バイト3:
ビット8,7:
汎用バルブのフェールセーフモード(A.21.42参照)
ビット6,5:
予約
ビット4〜1:
汎用バルブの状態(A.21.35参照)
バイト4:
ビット8〜6:
汎用バルブの推定制限ステータス(A.21.48参照)
ビット5〜1:
予約
バイト5〜8:
予約
B.25.3 汎用バルブの測定流量
このメッセージは,汎用バルブの測定流量を提供する。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
197
PDU特性:
DA
デフォルト優先順位:
3
PGN:
50432 (00C50016)
バイト1:
汎用バルブ伸びポートの測定流量(A.21.31参照)
バイト2:
汎用バルブ縮みポートの測定流量(A.21.32参照)
バイト3,4:
汎用バルブの伸びポート圧力(A.21.36参照)
バイト5,6:
汎用バルブの縮みポート圧力(A.21.37参照)
バイト7:
汎用バルブのリターンポート圧力(A.21.38参照)
バイト8:
ビット8〜6:
汎用バルブの測定制限ステータス(A.21.47参照)
ビット5〜1:
予約
B.25.4 汎用バルブのコマンド
このメッセージは,汎用バルブを通る流用制御を提供する。
送信周期:
100 ms動作時
データ長:
8バイト
データページ:
0
PDUフォーマット:
196
PDU特性:
DA
デフォルト優先順位:
3
PGN:
50176 (00C40016)
バイト1:
汎用バルブのポート流量コマンド(A.21.39参照)
バイト2:
予約
99
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト3:
ビット8,7:
汎用バルブのフェールセーフモード(A.21.42参照)
ビット6,5:
予約
ビット4〜1:
汎用バルブの状態(A.21.35参照)
バイト4〜8:
予約
B.25.5 汎用バルブの負荷検出圧力
このメッセージは,測定された負荷検出圧力及びバルブのパイロット圧力を提供する。バルブアセンブ
リが機能をもつ場合は,メッセージは,アセンブリの測定した負荷検出圧力及び供給圧力も提供できる。
送信周期:
100 ms動作時
データ長:
8バイト
データページ:
0
PDUフォーマット:
07
PDU特性:
DA
デフォルト優先順位:
6
PGN:
1792 (00070016)
バイト1,2:
汎用バルブの負荷検出圧力(A.21.43参照)
バイト3:
汎用バルブのパイロット圧力(A.21.44参照)
バイト4,5:
汎用バルブアセンブリの負荷検出圧力(A.21.45参照)
バイト6,7:
汎用バルブアセンブリの供給圧力(A.21.46参照)
バイト8:
予約
B.26 ガイダンスシステムメッセージ
B.26.1 ガイダンスシステムコマンド
このメッセージは,機械の操だ(舵)システムと自動ガイダンス制御システムとを結合することを意図
する。それは,操だ(舵)コマンドを提供し,ガイダンスシステムと操だ(舵)制御システムとの間で定
期的に送受信され,正常動作を確認するコマンドとしての役目を果たす。
送信周期:
100 ms動作時
データ長:
8バイト
データページ:
0
PDUフォーマット:
173
PDU特性:
DA
デフォルト優先順位:
3
PGN:
44288 (00AD0016)
バイト1,2:
曲率コマンド(A.28.1参照)
バイト3:
コマンド状態
ビット8〜3:
予約
ビット2,1:
曲率コマンドのステータス(A.28.3参照)
バイト4〜8:
予約
B.26.2 ガイダンス機械ステータス
このメッセージは,機械の操だ(舵)システムから自動ガイダンス制御システムへ操作するためのフィ
ードバックを提供する。それは,操だ(舵)制御システムからガイダンスシステムへ情報とステータスと
100
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を提供する。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
172
PDU特性:
DA
デフォルト優先順位:
3
PGN:
44032 (00AC0016)
バイト1,2:
推定曲率(A.28.2参照)
バイト3:
準備状態
ビット8,7:
要求リセットコマンドのステータス(A.28.4参照)
ビット6,5:
操だ(舵)入力ポジションステータス(A.28.5参照)
ビット4,3:
操だ(舵)システムの準備状況(A.28.6参照)
ビット2,1:
機械システムのロックアウト(A.28.7参照)
バイト4〜8:
予約
B.27 ISOBUS適合性認証メッセージ
このメッセージは,特定のECUの適合性認証状態を報告する。
送信周期:
要求に応じて
データ長:
8バイト
データページ:
0
PDUフォーマット:
253
PDU特性:
66
デフォルト優先順位:
6
PGN:
64834 (00FD4216)
バイト1:
ビット8,7:
ISOBUS適合性認証の改訂の最下位ビット(A.29.2参照)
ビット6〜1:
ISOBUS適合性認証の年(A.29.1参照)
バイト2:
ビット8〜6:
適合性認証試験機関のIDの最下位ビット(A.29.4参照)
ビット5:
予約
ビット4〜2:
ISOBUS適合性認証試験機関のタイプ(A.29.3参照)
ビット1:
ISOBUS適合性認証の改訂の最上位ビット(A.29.2参照)
バイト3:
ビット8〜1:
適合性認証試験機関のIDの最上位ビット(A.29.4参照)
適合性認証種類
バイト4:
ビット8:
ミニマムECU(A.29.5参照)
ビット7:
TECUクラス1(A.29.6参照)
ビット6:
TECUクラス2(A.29.7参照)
ビット5:
TECUクラス3(A.29.8参照)
ビット4:
クラス3 ECU(A.29.9参照)
ビット3:
仮想端末VT(A.29.10参照)
ビット2:
VTワーキングセットマスタ(A.29.11参照)
101
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ビット1:
VTワーキングセットメンバ(A.29.12参照)
バイト5:
ビット8:
タスクコントローラTC(A.29.13参照)
ビット7:
TCワーキングセットマスタ(A.29.14参照)
ビット6:
TCワーキングセットメンバ(A.29.15参照)
ビット5:
ファイルサーバー(A.29.16参照)
ビット4:
GPS受信機(A.29.17参照)
ビット3:
追加認証のための予約−(0にセット)
ビット2:
追加認証のための予約−(0にセット)
ビット1:
追加認証のための予約−(0にセット)
バイト6:
ビット8:
追加認証のための予約−(0にセット)
ビット7:
追加認証のための予約−(0にセット)
ビット6:
追加認証のための予約−(0にセット)
ビット5:
追加認証のための予約−(0にセット)
ビット4:
追加認証のための予約−(0にセット)
ビット3:
追加認証のための予約−(0にセット)
ビット2:
追加認証のための予約−(0にセット)
ビット1:
追加認証のための予約−(0にセット)
バイト7,8:
適応性認証番号(A.29.18参照)
B.28 機械の選択された速度メッセージ
B.28.1 機械の選択された速度
現在の機械の選択した速度,方向及びソースパラメータを提供するメッセージ。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
PDUフォーマット:
240
PDU特性:
34
デフォルト優先順位:
3
PGN:
61474 (00F02216)
バイト1,2:
機械の選択された速度(A.30.1参照)
バイト3〜6:
機械の選択された距離(A.30.2参照)
バイト7:
予約
バイト8:
ビット8〜6:
機械の選択された速度制限ステータス(A.30.8参照)
ビット5〜3:
機械の選択された速度ソース(A.30.4参照)
ビット2,1:
機械の選択された方向(A.30.3参照)
B.28.2 機械の選択された速度のコマンド
機械の速度及び方向の制御を提供するメッセージ。
送信周期:
100 ms
データ長:
8バイト
データページ:
0
102
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PDUフォーマット:
253
PDU特性:
67
デフォルト優先順位:
3
PGN:
64835 (00FD4316)
バイト1,2:
機械の選択された速度設定点コマンド(A.30.5参照)
バイト3,4:
機械の選択された速度の設定点の制限(A.30.7参照)
バイト5〜7:
予約
バイト8:
ビット8〜3:
予約
ビット2,1:
機械の選択された方向コマンド(A.30.6参照)
B.29 作業機作動状態のコマンド
現時点のコマンド作業機作動状態を接続システムに提供する,農業作業機の実装バス上にあるトラクタ
ECUによって送信するメッセージ。
送信周期:
1 s及び状態変動時
データ長:
8バイト
データページ:
0
PDUフォーマット:
253
PDU特性:
03
デフォルト優先順位:
3
PGN:
64771 (00FD0316)
バイト1〜7:
予約
バイト8:
ビット8〜3:
予約
ビット2,1:
作業機作動状態コマンド(A.25.1参照)
B.30 全作業機停止操作スイッチの状態
接続システムへ,全作業機停止操作スイッチの現時点での状態を提供する,農業作業機の実装バス上に
あるECUによって送信するメッセージ。
送信周期:
1 s及び状態変動時
データ長:
8バイト
データページ:
0
PDUフォーマット:
253
PDU特性:
02
デフォルト優先順位:
3
PGN:
64770 (00FD0216)
バイト1〜7:
予約
バイト8:
ビット8〜3:
予約
ビット2,1:
全作業機停止操作スイッチの状態(A.25.3参照)
103
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
トラクタ制御メッセージ−例
C.1 初期化,エラー回復及び背景
この附属書は,システム作動時からの相互運用性を最大限にし,かつ,不測の結果を最小限にするため
に,TECUを介しトラクタ及び作業機コントローラ又はタスクコントローラ間で,制御ループを確立する
ための推奨事項を提供する。このため,この附属書に準拠する必要はなく,トラクタはこの推奨事項に従
わない場合でも,更にサービスを提供しても差し支えはない。それでもなお,この推奨事項は,TECU実
装のためにトラクタシステム設計者が利用しているので,高い成功の可能性を提供する。
トラクタによるリモートコマンド受入れを開始するため,作業機コントローラは,そのコマンド値をト
ラクタから送信された現在の値と一致させる必要がある。これが達成されれば,トラクタは適切に制限状
態を変更し,作業機コントローラからの変更コマンドを受け入れ始める。これは,作業機の任意の制御操
作が“最新”の情報を基に行われていることを確かにし,作業機の要求した値に円滑に移行させる。
手動のヒッチ上昇操作などの外部深さ制御の要求を覆すように,現在行われている作業機への要求をオ
ペレータが止める操作を行う場合には,トラクタは,作業機にその要求が受け入れられないことを伝え,
そのステータスはオペレータ制限/制御となる。作業機は制限を受け入れ,引き続き制御を行うために,
解除するのを待つか,又はそのオペレータインタフェースを介して,その制限が解除することを要求する
ために,オペレータと対話することができる(すなわち,作業機がヒッチ下降コマンドを直ちに送出する。)。
トラクタが通信障害を見つけた場合,オペレータ制限/制御状態に切り替えるか,又は回復不能エラー
信号を送信するのが望ましい。トラクタをどちらの状態に切り替えるかは,与えられた障害状態から回復
するのに必要な操作による。トラクタが,リモートモードへの復帰を許可する前に,オペレータの介入(ト
ラクタネットワーク上)を必要とする場合,それは回復不能な障害として報告するのが望ましい。何か必
要なオペレータ介入があるかどうかは,トラクタシステム設計者の裁量による。
トラクタがオペレータ制限/制御状態へ戻る場合,作業機は,再開始する外部コマンドと現在のトラク
タ設定とが一致するのが望ましい。作業機は作業機の性質に応じて,VT上のインタフェースを介してオ
ペレータの介入を要求することができる。
トラクタは,作業機バスからのコマンドに応答して,その現在のコマンド値を送信するだけなので,作
業機は起動後,現在のトラクタコマンドを取得するために,通信を開始する必要がある。これは,“要求な
し”(“全ビットが1”)のコマンド値を送信して遂行する。トラクタはこのコマンドでは作動しないが,
現在のコマンド値で応答する。作業機は,リモートコマンド受け入れを開始させるために,現在のトラク
タコマンドを一致させることができる。
特定のコマンドがトラクタによってサポートされない場合,応答は特定コマンドの制限状態で“利用不
可”を含む。作業機の要求に含まれる任意のコマンドがサポートされていない場合,トラクタは,要求内
のリモートコマンド値のいずれも受け入れを開始しない。
トラクタ又は作業機は,リモートモードへの移行を受け付けず,モード変更に返答しないか,又はモー
ド変更を要求しないかのどちらかを決定できる。
上側が制限されている状態及び下側が制限されている状態の制御モードは,物理的又はオペレータ決定
の制限(例えば,ヒッチ上限)に達したときにトラクタによって送信する。作業機はその動作が制限され
104
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ていることを知り,制限を超えた設定点変更は,トラクタが無視するよう要求する。これは,例えば,ト
ラクタが設定点の変更割合を制限する場合は,一時的な状態とすることができる。変化が要求設定点に再
び達すれば,制限状態は,“制限されていない”へ戻ることが望ましい。
C.2 クルーズ制御
車両速度の単一の制御を提供する制御モード。
次に,リモートコマンドの受入れを開始するために交換するメッセージを説明する。
コマンドは,パラメータ,制御モードコマンド番号1及び制御値番号1だけを使用する。残りのパラメ
ータ,制御モードコマンド番号2,制御値番号2及び制御制限番号2は,全て“全ビットが1”の要求なし
状態に設定する。このコマンドでは,制御制限値なしの設定が必要で,パラメータ制御制限1は,“全ビッ
トが1”に設定する。
メッセージ1−作業機が,クルーズ制御の現在のトラクタコマンド値を要求する。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
11
デフォルト優先順位:
3
PGN:
65035 (00FE0B16)
バイト1:
ビット8〜4:
トラクタ制御モードコマンド #1
000012 クルーズ制御
ビット3〜1:
予約
1112
要求なし
バイト2:
ビット8〜4:
トラクタ制御モードコマンド #2
111112
要求なし
ビット3〜1:
予約
1112
要求なし
バイト3,4:
トラクタ制御コマンド値 #1
FFFF16 要求なし
バイト5:
トラクタ制御制限コマンド #1
FF16
要求なし
バイト6,7:
トラクタ制御コマンド値 #2
FFFF16 要求なし
バイト8:
トラクタ制御制限コマンド #2
FF16
要求なし
メッセージ2−トラクタは,リモート制御モードに移行せず応答する。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
10
デフォルト優先順位:
3
PGN:
65034 (00FE0A16)
バイト1:
ビット8〜4:
トラクタ制御モード応答 #1
000012 クルーズ制御
ビット3〜1:
トラクタ制御制限ステータス #1
0012
オペレータ制限/制御
バイト2:
ビット8〜4:
トラクタ制御モード応答 #2
111112
要求なし
ビット3〜1:
トラクタ制御制限ステータス #2
1112
要求なし
バイト3,4:
トラクタ制御値応答 #1
600
実際速度0.6 m/s
105
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト5:
トラクタ制御制限 #1
FF16
要求なし
バイト6,7:
トラクタ制御値応答 #2
FFFF16 要求なし
バイト8:
トラクタ制御制限 #2
FF16
要求なし
メッセージ3−作業機が,クルーズ制御に設定点の調整を要求する。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
11
デフォルト優先順位:
3
PGN:
65035 (00FE0B16)
バイト1:
ビット8〜4:
トラクタ制御モードコマンド #1
000012 クルーズ制御
ビット3〜1:
予約
1112
要求なし
バイト2:
ビット8〜4:
トラクタ制御モードコマンド #2
111112
要求なし
ビット3〜1:
予約
1112
要求なし
バイト3,4:
トラクタ制御コマンド値 #1
600
現在の速度0.6 m/s
バイト5:
トラクタ制御制限コマンド #1
FF16
要求なし
バイト6,7:
トラクタ制御コマンド値 #2
FFFF16 要求なし
バイト8:
トラクタ制御制限コマンド #2
FF16
要求なし
メッセージ4−制御モードに移行し,作業機からの設定点の調整を受け入れ後のトラクタ側の応答。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
10
デフォルト優先順位:
3
PGN:
65034 (00FE0A16)
バイト1:
ビット8〜4:
トラクタ制御モード応答 #1
000012 クルーズ制御
ビット3〜1:
トラクタ制御制限ステータス #1
0002
制限なし
バイト2:
ビット8〜4:
トラクタ制御モード応答 #2
111112
要求なし
ビット3〜1:
トラクタ制御制限ステータス #2
1112
要求なし
バイト3,4:
トラクタ制御値応答 #1
600
実際速度0.6 m/s
バイト5:
トラクタ制御制限 #1
FF16
要求なし
バイト6,7:
トラクタ制御値応答 #2
FFFF16 要求なし
バイト8:
トラクタ制御制限 #2
FF16
要求なし
メッセージ5−作業機が,速度変更を要求する。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
106
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PDU特性:
11
デフォルト優先順位:
3
PGN:
65035 (00FE0B16)
バイト1:
ビット8〜4:
トラクタ制御モードコマンド #1
000012 クルーズ制御
ビット3〜1:
予約
1112
制限なし
バイト2:
ビット8〜4:
トラクタ制御モードコマンド #2
111112
要求なし
ビット3〜1:
予約
1112
要求なし
バイト3,4:
トラクタ制御コマンド値 #1
500
0.5 m/sへ減速
バイト5:
トラクタ制御制限コマンド #1
FF16
要求なし
バイト6,7:
トラクタ制御コマンド値 #2
FFFF16 要求なし
バイト8:
トラクタ制御制限コマンド #2
FF16
要求なし
メッセージ6−トラクタは,速度変更要求を受け入れる。
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
10
デフォルト優先順位:
3
PGN:
65034 (00FE0A16)
バイト1:
ビット8〜4:
トラクタ制御モード応答 #1
000012 クルーズ制御
ビット3〜1:
トラクタ制御制限ステータス #1
0002
リモートモード
バイト2:
ビット8〜4:
トラクタ制御モード応答 #2
111112 要求なし
ビット3〜1:
トラクタ制御制限ステータス #2
1112
利用不可
バイト3,4:
トラクタ制御値応答 #1
500
0.5 m/s
バイト5:
トラクタ制御制限 #1
FF16
要求なし
バイト6,7:
トラクタ制御値応答 #2
FFFF16 要求なし
バイト8:
トラクタ制御制限 #2
FF16
要求なし
C.3 PTO定速速度及びクルーズ制御の組合せ
車速及びPTO定速速度を組み合わせた制御モード。
コマンドは,パラメータ,制御モードコマンド番号1,制御値番号1及び制御値番号2を使用する。残
りのパラメータである制御モードコマンド番号2は,“全ビットが1”状態の“要求なし”へ設定する。こ
のコマンドは,PTOセクションを示す制御値番号1,及びクルーズ制御セクションを示す制御値番号2に
よる二つのコマンドの一体化である。次の送受信は,リモート制御モードへ移行するための初期化のエン
トリーを省いているが,オペレータは,作業機が超過しようとする最大速度(5 km/h)を設定している状
態を示す。
作業機の要求
データ長:
8バイト
データページ:
0
107
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PDUフォーマット:
254
PDU特性:
11
デフォルト優先順位:
3
PGN:
65035 (00FE0B16)
バイト1:
ビット8〜4:
トラクタ制御モードコマンド #1
010102 PTO及びクルーズ複合
ビット3〜1:
予約
1112
要求なし
バイト2:
ビット8〜4:
トラクタ制御モードコマンド #2
111112
要求なし
ビット3〜1:
予約
1112
要求なし
バイト3,4:
トラクタ制御コマンド値 #1
4320
540/min
バイト5:
トラクタ制御制限コマンド #1
FF16
要求なし
バイト6,7:
トラクタ制御コマンド値 #2
2000
2 m/s(7.2 km/h)
バイト8:
トラクタ制御制限コマンド #2
FF16
要求なし
トラクタの応答
データ長:
8バイト
データページ:
0
PDUフォーマット:
254
PDU特性:
10
デフォルト優先順位:
3
PGN:
65034 (00FE0A16)
バイト1:
ビット8〜4:
トラクタ制御モード応答 #1
010102 PTO及びクルーズ複合
ビット3〜1:
トラクタ制御制限ステータス #1
0002
制限なし
バイト2:
ビット8〜4:
トラクタ制御モード応答 #2
111112
要求なし
ビット3〜1:
トラクタ制御制限ステータス #2
0102
上位制限
バイト3,4:
トラクタ制御値応答 #1
4320
540/min
バイト5:
トラクタ制御制限 #1
FF16
要求なし
バイト6,7:
トラクタ制御値応答 #2
1389
1.389 m/s(5 km/h)
バイト8:
トラクタ制御制限 #2
FF16
要求なし
C.4 補助バルブのスリップ制御及びクルーズ制御
補助バルブの流量変動による車両スリップ及び速度制御の複合制御を提供する制御モード。この例も,
初期の接続が完了した以下の作業機バス上のデバイスから送信されたメッセージを示す。
補助バルブスリップ制御コマンドは,パラメータ,制御モードコマンド番号1及び制御値番号1だけを
使用する。残りのパラメータ,制御モードコマンド番号2及び制御値番号2は,クルーズ制御のために使
用する。制御値番号1は,補助バルブ流量(バイト3),補助バルブの状態及び番号(バイト4)の要素か
ら構成する。これら二つのコマンド間に明確な優先権は存在しない。加えて,パラメータ設定が保持され
ていれば,コマンドパラメータ番号1及び番号2は逆にしてもよい。
作業機からのメッセージ
データ長:
8バイト
108
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
データページ:
0
PDUフォーマット:
254
PDU特性:
11
デフォルト優先順位:
3
PGN:
65035 (00FE0B16)
バイト1:
ビット8〜4:
トラクタ制御モードコマンド #1
001112 バルブスリップ制御
ビット3〜1:
予約
1112
要求なし
バイト2:
ビット8〜4:
トラクタ制御モードコマンド #2
000012 クルーズ制御
ビット3〜1:
予約
1112
要求なし
バイト3,4:
トラクタ制御コマンド値 #1
ビット16〜9:
コマンドした補助バルブ流量値
25
流量10 %
ビット8〜5:
コマンドした補助バルブ状態
00012
押出し
ビット4〜1:
コマンドした補助バルブ番号
00102
バルブ 2
バイト5:
トラクタ制御制限コマンド #1
FF16
要求なし
バイト6,7:
トラクタ制御コマンド値 #2
1389
1.389 m/s(5 km/h)
バイト8:
トラクタ制御制限コマンド #2
FF16
要求なし
109
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
トラクタ機能の作業機制御−制御の実装
作業機コマンド及びリモート制御メッセージの目的は,オペレータから作業機へ制御を転送するのでは
なく,むしろ,トラクタ全体の制御の枠組みに,作業機コントローラの能力を含めたメカニズムを提供す
ることである。これらのパラメータは,作業機コントローラによって高速制御ループ内では調整されない
ことを推奨する。任意の設定点変更への応答時間は,システム間で異なるCANバス待ち時間及びフィル
タリング及び/又はトラクタ内の待ち時間などの複数の変動要因に依存する。
作業機からのヒッチポジションコマンドは,作業機の要求を開始する前にオペレータが設定した任意の
制限設定又は操作と合わせて,トラクタが調整したほうがよい要求である。オペレータの操作及び設定は
“動作範囲”を定義し,その範囲内でトラクタは作業機を動作させてよい。
ヒッチは,このコンセプトを説明するよい例である。ヒッチは,上限及び下限のポジションをオペレー
タが設定できる。加えて,ほとんどのシステムには,そのときのけん引力に基づいて,ヒッチのポジショ
ン上限及び/又は下限を連続して調整する“ドラフト−ミックス”のような設定がある。上限及び下限は,
一つの“範囲”を定義する。ドラフト−ミックスの論理は,ヒッチ動作の範囲を更に制限できる。これら
の設定は,作業機からのヒッチポジションコマンドを制限する。
作業機からのヒッチコマンドは,ヒッチの制限状態が解除すると,望むポジションへの移動を続けるの
で“持続的コマンド”とみなす。例えば,オペレータは,ドラフト−ミックスをより広い範囲に可能にす
るように調整する。
PTO入切のようなコマンドは,“一時的コマンド”とみなす。それらは実際一時的であり,すぐに条件
が満たされない場合は,コマンドはトラクタによって無視する。例えば,キャビン内の操作装置によって
PTOが停止されている場合,PTOを入りにするコマンドは無視する。キャビン内の操作装置が,作業機の
PTO入りを可能にするように操作した場合でも,作業機が新しい“入”コマンドを送信するまでPTOは入
りにはならない。
リヤヒッチのような“持続的コマンド”機能の外部からの制御を開始するには,作業機コントローラは,
最初に,リヤヒッチステータスPGNに含まれるヒッチポジションパラメータと同じ値を,ヒッチ及びPTO
コマンドPGNで送信しなければならない。トラクタがこのコマンドを受け入れる場合,リヤヒッチポジシ
ョン制限ステータスパラメータの中で,“制限なし”(000)の値で応答する。
作業機コントローラが,制御を要求しないか又は機能の制御を打ち切るとき,トラクタへのコマンドで,
“要求なし”(“111”)の値を送信しなければならない。
“一時的コマンド”機能(例えば,PTO)の初期化は,これと同様である。作業機は,コマンドPGNで
トラクタパラメータの現時点での値を送信しなければならない。トラクタが,対応要求ステータスで“外
部要求受付済み”と応答するとき,それ以下の作業機からのコマンドを受け入れて,それに応じて対応す
る。オペレータが操作するか又は外部コマンド機能を抑止する状態の場合は,常にトラクタは,対応する
要求ステータスパラメータで,“ドライバ制御”又は“エラー”を報告することが望ましい。
110
B 9225-7:2016 (ISO 11783-7:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS B 9225-10 農業機械−シリアル制御及び通信データ・ネットワーク−第10部:タスクコントロー
ラ及び管理情報システムデータ交換
注記 対応国際規格:ISO 11783-10,Tractors and machinery for agriculture and forestry−Serial control
and communications data network−Part 10: Task controller and management information system
data interchange(IDT)
[2] ISO 11898-1:2003,Road vehicles−Controller area network (CAN)−Part 1: Data link layer and physical
signalling
[3] SAE J1939,Recommended Practice for a Serial Control and Communications Vehicle Network