B 8943:2012
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 スタッカクレーン各部の名称 ······························································································ 2
5 構造······························································································································· 3
6 昇降装置························································································································· 3
6.1 ブレーキ ······················································································································ 3
6.2 昇降終端限におけるオーバラン防止機能············································································· 4
6.3 過負荷検知機能 ············································································································· 4
6.4 ワイヤロープ又はつりチェーン緩み検知機能 ······································································· 4
6.5 落下防止機能 ················································································································ 4
6.6 昇降超過速度検知機能 ···································································································· 5
6.7 ワイヤロープ又はつりチェーン ························································································ 5
6.8 ドラム,シーブ及びワイヤロープ······················································································ 5
7 走行装置························································································································· 6
7.1 ブレーキ ······················································································································ 6
7.2 走行終端限における通路外へのオーバラン防止 ···································································· 6
7.3 スタッカクレーン相互の衝突防止······················································································ 6
7.4 走行超過速度検知機能 ···································································································· 6
7.5 脱輪防止機構 ················································································································ 7
7.6 安定度 ························································································································· 7
8 フォーク装置 ··················································································································· 7
8.1 積荷の安定 ··················································································································· 7
8.2 ブレーキ ······················································································································ 7
8.3 オーバストローク防止機能 ······························································································ 7
8.4 駆動力の制限 ················································································································ 7
9 運転室及び昇降式点検室 ···································································································· 8
9.1 構造及び強度 ················································································································ 8
9.2 運転室及び昇降式点検室の非常脱出装置············································································· 8
9.3 ピッキング時の墜落防止 ································································································· 8
10 スタッカクレーン用トラバーサ ························································································· 9
10.1 安定度 ························································································································ 9
10.2 停止位置の保持 ············································································································ 9
10.3 スタッカクレーン用トラバーサのオーバラン防止機能 ························································· 9
B 8943:2012 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
10.4 スタッカクレーン用トラバーサに設置するスタッカクレーンのオーバラン防止機能 ·················· 9
10.5 スタッカクレーン用トラバーサへの乗移り前のオーバラン防止機能 ······································· 9
11 電源 ···························································································································· 11
11.1 給電装置 ···················································································································· 11
11.2 接触給電 ···················································································································· 11
11.3 移動ケーブル ·············································································································· 11
11.4 電源断路器 ················································································································· 11
12 制御 ···························································································································· 12
12.1 制御機器一般 ·············································································································· 12
12.2 動作に関するインタロック機能 ······················································································ 12
12.3 運転モード切替 ··········································································································· 13
12.4 手動操作機器の操作 ····································································································· 14
13 安全対策 ······················································································································ 15
13.1 機械安全リスクアセスメントの実施 ················································································ 15
13.2 昇降設備 ···················································································································· 15
13.3 安全帯取付け金具 ········································································································ 15
13.4 固定式ガードの取付け ·································································································· 15
14 表示 ···························································································································· 15
14.1 スタッカクレーンに関する表示 ······················································································ 15
14.2 運転状態の表示 ··········································································································· 15
14.3 安全に関する表示 ········································································································ 16
B 8943:2012
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本産業
機械工業会(JSIM)及び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正
すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS B 8943:1998は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8943:2012
立体自動倉庫システム−スタッカクレーン設計通則
Automated storage and retrieval system-
General rules on the design of storage and retrieval machine
序文
この規格は,1998年に制定され,その後1回の改正を経て今日に至っている。今回,その後の設計時に
おける機械類の安全性確保のための基本概念に関するJIS B 9700-1及びJIS B 9700-2の制定に対応するた
めに改正した。
なお,対応国際規格は現時点で制定されていない。
1
適用範囲
この規格は,スタッカクレーン,入出庫ステーション及びラックで構成する立体自動倉庫システムに用
いるスタッカクレーンの設計通則について規定する。
スタッカクレーンの範囲は,スタッカクレーン本体,その通路内に設置する附属設備及び通路外に設置
する地上操作盤とする。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 8821 クレーン鋼構造部分の計算基準
JIS B 8826-1 クレーン−通路及び保護装置−第1部:一般
JIS B 8831 クレーン−荷重及び荷重の組合せに関する設計原則
JIS B 8833-1 クレーン−荷重及び荷重の組合せに関する設計原則−第1部:一般
JIS B 8835-1 クレーン−ワイヤロープの選定−第1部:一般
JIS B 8941 立体自動倉庫システム−用語
JIS B 8942 立体自動倉庫システム−システム設計通則
JIS B 9700-1 機械類の安全性−設計のための基本概念,一般原則−第1部:基本用語,方法論
JIS B 9700-2 機械類の安全性−設計のための基本概念,一般原則−第2部:技術原則
JIS B 9702 機械類の安全性−リスクアセスメントの原則
JIS B 9703 機械類の安全性−非常停止−設計原則
JIS B 9705-1 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
JIS B 9713-1 機械類の安全性−機械類への常設接近手段−第1部:高低差のある2か所間の固定され
た昇降設備の選択
JIS B 9713-2 機械類の安全性−機械類への常設接近手段−第2部:作業用プラットフォーム及び通路
2
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 9713-3 機械類の安全性−機械類への常設接近手段−第3部:階段,段ばしご及び防護さく(柵)
JIS B 9713-4 機械類の安全性−機械類への常設接近手段−第4部:固定はしご
JIS B 9716 機械類の安全性−ガード−固定式及び可動式ガードの設計及び製作のための一般要求事
項
JIS B 9960-1 機械類の安全性−機械の電気装置−第1部:一般要求事項
JIS B 9960-32 機械類の安全性−機械の電気装置−第32部:巻上機械に対する要求事項
JIS B 9961 機械類の安全性−安全関連の電気・電子・プログラマブル電子制御システムの機能安全
JIS C 0508-1 電気・電子・プログラマブル電子安全関連系の機能安全−第1部:一般要求事項
JIS C 0508-2 電気・電子・プログラマブル電子安全関連系の機能安全−第2部:電気・電子・プログ
ラマブル電子安全関連系に対する要求事項
JIS C 0508-3 電気・電子・プログラマブル電子安全関連系の機能安全−第3部:ソフトウェア要求事
項
JIS C 0508-4 電気・電子・プログラマブル電子安全関連系の機能安全−第4部:用語の定義及び略語
JIS C 0508-5 電気・電子・プログラマブル電子安全関連系の機能安全−第5部:安全度水準決定方法
の事例
JIS C 0508-6 電気・電子・プログラマブル電子安全関連系の機能安全−第6部:第2部及び第3部の
適用指針
JIS C 0508-7 電気・電子・プログラマブル電子安全関連系の機能安全−第7部:技術及び手法の概観
JIS C 6802 レーザ製品の安全基準
JIS Z 9110 照明基準総則
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 8941による。
4
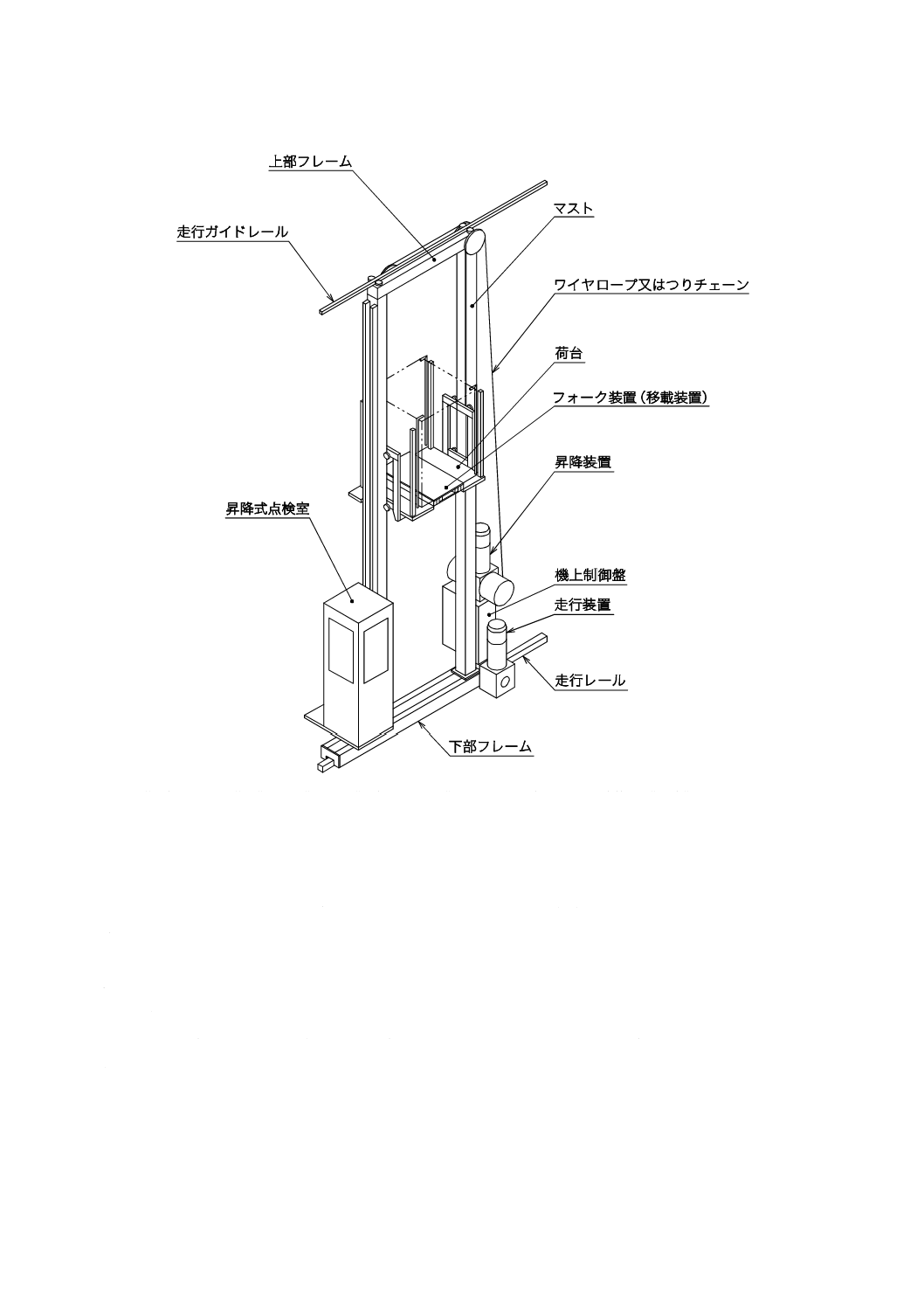
スタッカクレーン各部の名称
スタッカクレーン各部の名称は,図1による。
3
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 “上部フレーム”,“マスト”及び“下部フレーム”によって構成された構造体を“主枠”とする。
図1−スタッカクレーン各部の名称
5
構造
スタッカクレーン構造部の強度関係は,JIS B 8821,JIS B 8831及びJIS B 8833-1に従って設計しなけれ
ばならない。
6
昇降装置
6.1
ブレーキ
荷台及び昇降式点検室の昇降装置は,ブレーキをもたなければならない。ブレーキは,次による。
a) 動力遮断時に,ブレーキは,自動的に作動する。
b) ブレーキは,定格荷重積載の状態及び定格速度から昇降動作を停止し,停止位置を維持する機能をも
つものとする。
c) ブレーキの制動トルクは,つり上げ荷重を昇降するのに必要なトルクの1.5倍以上とする。
4
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 昇降装置のブレーキとドラム又はスプロケットとの接続は,工具を使用しないと外せない機構とする。
e) 手動ブレーキ開放レバーを備えている場合は,レバーを離したときに,自動的にブレーキが作動する
機構とする。
6.2
昇降終端限におけるオーバラン防止機能
6.2.1
共通事項
荷台及び昇降式点検室の昇降終端限におけるオーバランを防止するため,オーバラン防止機能をそれぞ
れ独立して設けなければならない。
6.2.2
機械式ストッパ
機械式ストッパは,次による。
a) 昇降終端限に設け,荷台及び昇降式点検室のオーバランを防止できる強度をもつものとする。
b) 荷台の上昇終端限の機械式ストッパは,スタッカクレーンの上部フレームと荷との間,又はスタッカ
クレーンの上部フレームと荷台との間に50 mm以上の隙間が残る位置に取り付けるものとする。昇降
式点検室の上昇終端限の機械式ストッパは,昇降式点検室と構造物の間に50 mm以上の隙間が残る位
置に取り付けるものとする。
6.2.3
昇降終端限強制停止機能
昇降終端限強制停止機能は,次による。
a) 荷台及び昇降式点検室の昇降終端限を検出する検出器を備え,検出時に速やかに動力を遮断して,昇
降減速機能によって減速された速度から,機械式ストッパに接触する前に停止する。
b) 検出器は,直接開路動作機能付制御スイッチ(JIS C 8201-5-1参照)で平行カムなどによって動作す
る直動式とするか又はこれと同等以上の安全と機能が確保できる機構とする。
c) JIS B 9705-1に従って制御機器の危険側故障時を考慮して設計する。
6.2.4
昇降強制減速機能
昇降強制減速機能は,次による。
a) 昇降終端限強制停止機能が有効に機能できる設定速度まで減速する。
b) JIS B 9705-1に従って制御機器の危険側故障時を考慮して設計する。
6.3
過負荷検知機能
モータは,昇降装置を保護するために過負荷検知機能を備えるものとし,過負荷を検知した場合は自動
的に停止する[JIS B 9960-32の7.3(電動機の温度上昇保護)参照]。
定格荷重を超えた荷が取り扱われる可能性がある場合は,JIS B 8942の7.5.1(荷姿異常検知機能及び過
荷重検知機能)による。
6.4
ワイヤロープ又はつりチェーン緩み検知機能
荷台及び昇降式点検室は,緩み検知機能を設けなければならない。緩み検知機能は,次による。
a) 荷台及び昇降式点検室をつり下げているワイヤロープ又はつりチェーンの緩み,又は切断を検知した
ときは,スタッカクレーンの全ての動作を自動的に停止する。
b) 各々独立した複数のワイヤロープ又はつりチェーンでつられている場合は,それぞれのワイヤロープ
又はつりチェーンごとに検出器を設け各々独立して検出する。
c) JIS B 9705-1に従って制御機器の危険側故障時のリスクを考慮して設計する。
6.5
落下防止機能
落下防止機能は,人荷昇降式スタッカクレーンの荷台,及び昇降式点検室に設けなければならない。落
下防止機能は,次による。
5
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) つり下げているワイヤロープ又はつりチェーンのうち少なくとも1本が切断した場合に,その切断を
自動的に検知し,落下を防止しなければならない。
b) 落下防止機能作動時の減速度は,搭乗者への影響を考慮して制限する。
6.6
昇降超過速度検知機能
昇降超過速度検知機能は,昇降定格速度が0.5 m/s以上の人荷昇降式スタッカクレーンに設けなければな
らない。昇降超過速度検知機能は,次による。
a) 超過速度が1秒以上継続した場合は,昇降装置を速やかに停止する。超過速度とは,定格速度より定
格速度の25 %又は0.2 m/sを超えた速度をいう。
b) JIS B 9705-1に従って制御機器の危険側故障時のリスクを考慮して設計する。
6.7
ワイヤロープ又はつりチェーン
6.7.1
安全率
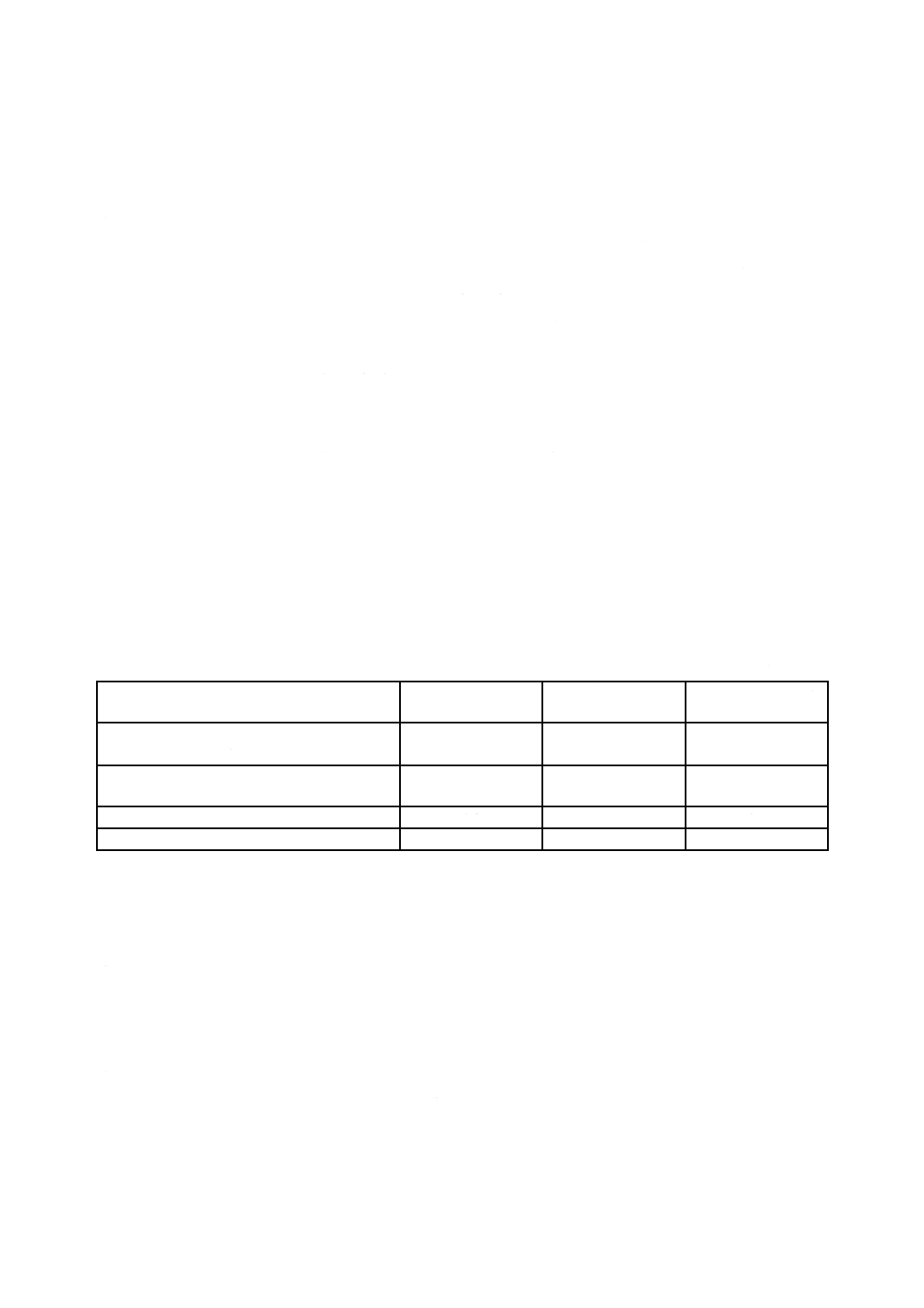
荷台及び昇降式点検室をつるワイヤロープ又はつりチェーンの安全率は,表1の値以上にしなければな
らない。安全率は,切断荷重を最大荷重(ワイヤロープ又はつりチェーンが複数の場合は負荷の大きい方)
で除して得た値をいう。
表1−安全率
荷台及び昇降式点検室の種類
ワイヤロープ
つりチェーン
荷昇降式スタッカクレーンの荷台
5
5
人荷昇降式スタッカクレーンの荷台
9
10
昇降式点検室
9
10
6.7.2
負荷の均等化及び最小つり上げ本数
ワイヤロープ又はつりチェーンの使用条件は,次による。
a) ワイヤロープ又はつりチェーンが複数の場合,それぞれのワイヤロープ又はつりチェーンの負荷は均
等化できる機構とする。均等化する機構が正常に動作できない場合は,その状態を検知し,スタッカ
クレーンの全ての動作を自動的に停止する。
b) 人荷昇降式スタッカクレーンの荷台,及び昇降式点検室のつり上げは,2本以上のワイヤロープ又は
つりチェーンを用いるものとする。
6.7.3
交換
スタッカクレーンは,ワイヤロープ又はつりチェーンの交換を考慮した構造とする。
6.7.4
ワイヤロープの最小巻き数
ワイヤロープは,荷台及び昇降式点検室が下降終端限のとき,ドラムに2巻以上残る長さとする。
6.7.5
外れ防止
シーブからロープ,又はチェーンホイールからチェーンが外れないための外れ防止機構を設けるものと
する。
6.7.6
落下物からの保護
シーブとロープとの間,スプロケットとチェーンとの間又はチェーンホイールとチェーンとの間への落
下物の危険性がある箇所は,かみ込み防止機構を設けるものとする。
6.8
ドラム,シーブ及びワイヤロープ
ドラム,シーブ及びワイヤロープの選定は,JIS B 8835-1による。
6
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7
走行装置
7.1
ブレーキ
走行装置は,ブレーキをもたなければならない。ブレーキは,次による。
a) 動力遮断時に,ブレーキは自動的に作動する。
b) ブレーキは,定格荷重積載の状態及び定格速度から走行動作を停止できる機能をもつものとする。
c) 搭乗運転するスタッカクレーンの走行駆動にロープ,ベルト又はチェーンを用いる場合,それらが脱
落又は切断しても停止できるブレーキを設けるものとする。
d) 複数の駆動装置をもつ場合,個々のブレーキは7.1 a)〜7.1 c) に適合する。
7.2
走行終端限における通路外へのオーバラン防止
7.2.1
共通事項
スタッカクレーンの走行終端限での通路外へのオーバランを防止するため,オーバラン防止機能をそれ
ぞれ独立して設けなければならない。
7.2.2
機械式ストッパ及び緩衝装置
機械式ストッパ及び緩衝装置は,次による。
a) 走行終端限に設け,定格荷重積載の状態及び定格速度で衝突しても,スタッカクレーンの通路外への
オーバランを防止できる強度をもつものとする。
b) 緩衝装置は,定格荷重積載の状態及び走行強制減速機能で減速した速度で衝突しても,その衝突エネ
ルギーを吸収するように設計する。ただし,人荷昇降式スタッカクレーンでは,定格荷重積載の状態
及び搭乗運転時の定格速度で衝突しても,4.9 m/s2以下の減速度になるように設計する。
7.2.3
走行終端限強制停止機能
走行終端限強制停止機能は,次による。
a) スタッカクレーンの走行終端限を検出する検出器を備え,検出時速やかに動力を遮断して停止する。
b) 手動操作時は,制限された速度(12.4.2参照)から,スタッカクレーンが緩衝装置に接触する前に停
止する。
c) 検出器は,直接開路動作機能付制御スイッチ(JIS C 8201-5-1参照)で平行カムなどによって動作す
る直動式とするか又はこれと同等以上の機能が確保できる機構とする。
d) JIS B 9705-1に従って制御機器の危険側故障時を考慮して設計する。
7.2.4
走行強制減速機能
走行強制減速機能は,次による。
a) 緩衝装置に衝突する前に,設定の速度に減速するものとし,衝突前の設定速度は,設計時に定格速度
の70 %以下になるように設定する。
b) JIS B 9705-1に従って制御機器の危険側故障時を考慮して設計する。
7.3
スタッカクレーン相互の衝突防止
他のスタッカクレーンへの衝突を防止するために,衝突の危険が起こらないようにインタロック機能を
設けなければならない。同一レール上に2台以上のスタッカクレーンがある場合は,7.2に規定する緩衝装
置,強制停止機能及び強制減速機能を相互のスタッカクレーンに設けるものとする。
7.4
走行超過速度検知機能
走行超過速度検知機能は,走行定格速度が1.0 m/s以上のスタッカクレーンに設けなければならない。走
行超過速度検知機能は,次による。
a) 超過速度が1秒以上継続した場合は,走行装置を速やかに停止する。超過速度は,定格速度より定格
7
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
速度の25 %又は0.5 m/sを超えた速度をいう。
b) JIS B 9705-1に従って制御機器の危険側故障時を考慮して設計する。
7.5
脱輪防止機構
スタッカクレーンは,転倒を防止するために脱輪防止機構を設けなければならない。脱輪防止機構は,
次による。
a) 非常停止時でも車輪の脱輪を防止する機構とする。
b) つば付車輪又はガイドローラが破損しても脱輪及び転倒を防止できる機構とする。
c) 脱輪防止機能を兼ねるレールスイーパは走行車輪の前方に設置する。レールと非接触のレールスイー
パは,レール表面との隙間を少なくする。
7.6
安定度
安定度は,いかなる条件でも,通常運転時は1.5以上,非常停止時は1.1以上,更に7.2.2 a) の条件で緩
衝装置に衝突しても1.0以上としなければならない。この安定度が確保されない場合は,転倒防止機構を
取り付ける。この機構は7.2.2 a) の条件で緩衝装置に衝突しても転倒を防止できる強度をもつものとする。
安定度は,次の式で求める。
∑∑
=
o
s
M
M
S
ここに,
S: 安定度
Ms: 安定モーメント
Mo: 転倒モーメント
8
フォーク装置
8.1
積荷の安定
フォーク装置は,通常運転時に仕様範囲内の荷を安定した状態に保つように設計する。
8.2
ブレーキ
フォーク装置は,ブレーキをもたなければならない。ブレーキは,次による。
a) 動力遮断時に,ブレーキは自動的に作動する。
b) ブレーキは,定格荷重積載の状態及び定格速度から動作を停止し,停止位置を維持する機能をもつも
のとする。
8.3
オーバストローク防止機能
フォーク装置のオーバストロークを防止するために,オーバストローク防止機能を設けなければならな
い。オーバストローク防止機能は,次による。
a) 機械式ストッパは,フォークストローク出限に設けるものとする。
b) 機械式ストッパは,オーバストローク時の力に耐える強度をもつものとする。
c) オーバストローク防止機能は,オーバストローク時における駆動装置の過負荷を防止できる機能とす
る[JIS B 9960-1の7.3(電動機の温度上昇保護)参照]。
8.4
駆動力の制限
フォーク装置は,設備(フォーク装置,ラックなど)の保護のために,異常な負荷を検知して駆動力を
制限する機能を備えなければならない。
8
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9
運転室及び昇降式点検室
9.1
構造及び強度
9.1.1
共通事項
運転室及び昇降式点検室は,搭乗者に危害が及ばない構造及び強度にしなければならない。構造の共通
事項は,次による。
a) 運転室又は昇降式点検室は,操作位置での操作に対応する動作(スタッカクレーン通路上の走行・昇
降動作又は荷台上のフォーク装置の動作)が確認できる視野を確保する。
b) 上面,側面又は床面にガラスを用いる場合は,多層安全ガラスとし,破損時に破片が飛散しないよう
にする。
c) 構造部材は不燃性とし,それ以外は難燃性とする。
9.1.2
上部
上部の構造及び強度は,次による。
a) 天井又はヘッドガードは,400 mm×400 mm当たり1 000 Nの集中荷重を加えた場合に永久変形しな
い強度をもつものとする。
b) 上部の開口部は,φ30 mmの球が通過しないようにする。
9.1.3
側面
側面の構造及び強度は,次による。
a) 搭乗者の墜落が防止できる構造及び強度とする。
b) スタッカクレーン動作中,搭乗者が設備に接触しないように,人体の一部を外部に出せない構造とす
る。ドア及び開閉式の窓が開いているときは,運転できないようにインタロック機能を備えるものと
する。
c) ドアは,搭乗者の墜落を防止するために,内開きとし,確実なロックを備えるものとする。ただし,
扉の外側に墜落防止対策を施している場合は内開きに限定しない。
9.1.4
床面
床面の構造及び強度は,次による。
a) 床面は5度以内の水平度とし,滑り防止の処置を施すものとする。
b) 床面は1 800 N/m2の平均荷重を加えた場合,及び400 mm×400 mm当たり1 000 Nの集中荷重を加え
た場合に,永久変形しない強度をもつものとする。
c) 床面の開口部は,φ30 mmの球が通過しないようにする。
9.1.5
内部
内部の構造は,次による。
a) 搭乗者を傷つけないように,鋭利な角,突起などがあってはならない。
b) JIS Z 9110に従って操作をするのに十分な照度をもった照明装置を確保する。照明装置には,照明本
体の落下及び破損時に破片が飛散しないようにカバーを取り付ける。
9.2
運転室及び昇降式点検室の非常脱出装置
停電時又は落下防止機能の作動時に,運転室及び昇降式点検室から安全に脱出できる装置を備えなけれ
ばならない。
9.3
ピッキング時の墜落防止
ピッキング式スタッカクレーンは,ピッキング時に,作業者の墜落を防止できる構造(防護柵など)及
び強度としなければならない。
9
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なお,ピッキングテーブルを防護柵の代わりに用いる場合は,テーブルの高さは0.9 m以上とする。
10 スタッカクレーン用トラバーサ
10.1 安定度
床上形のスタッカクレーン用トラバーサの安定度は,最大揚程に定格荷重を積載したスタッカクレーン
を搭載して移送するときを含め,1.5以上としなければならない。
安定度の規定は7.6による。
10.2 停止位置の保持
スタッカクレーン用トラバーサは,スタッカクレーンがスタッカクレーン通路からスタッカクレーン用
トラバーサへ,又はその逆の移動がスムーズにできるように,所定の停止位置を保持しなければならない。
10.3 スタッカクレーン用トラバーサのオーバラン防止機能
10.3.1 共通事項
スタッカクレーン用トラバーサの走行終端限での通路外へのオーバランを防止するため,オーバラン防
止機能をそれぞれ独立して設けなければならない。
10.3.2 機械式ストッパ及び緩衝装置
機械式ストッパ及び緩衝装置は,次による。
a) 走行終端限に設け,定格荷重積載の状態及び定格速度で衝突しても,スタッカクレーン用トラバーサ
の通路外へのオーバランを防止できる強度をもつものとする。
b) 緩衝装置は,定格荷重積載の状態及び走行強制減速機能で減速した速度で衝突しても,その衝突エネ
ルギーを吸収するように設計する。
10.3.3 走行終端限強制停止機能
走行終端限強制停止機能は,次による。
a) スタッカクレーン用トラバーサの走行終端限を検出する検出器を備え,検出時速やかに動力を遮断し
て停止する。
b) 手動操作時は,制限された速度から,スタッカクレーン用トラバーサが緩衝装置に接触する前に停止
する。
c) 検出器は,直接開路動作機能付制御スイッチ(JIS C 8201-5-1参照)で平行カムなどによって動作す
る直動式とするか又はこれと同等以上の機能が確保できる機構とする。
d) JIS B 9705-1に従って制御機器の危険側故障時を考慮して設計する。
10.3.4 走行強制減速機能
走行強制減速機能は,次による。
a) 緩衝装置に衝突する前に,設定の速度に減速するものとし,衝突前の設定速度は,設計時に定格速度
の70 %以下になるように設定する。
b) JIS B 9705-1に従って制御機器の危険側故障時を考慮して設計する。
10.4 スタッカクレーン用トラバーサに設置するスタッカクレーンのオーバラン防止機能
スタッカクレーンがスタッカクレーン用トラバーサへ乗り移る場合,オーバランしないように,7.2のオ
ーバラン防止機能をスタッカクレーン用トラバーサに設けなければならない。
10.5 スタッカクレーン用トラバーサへの乗移り前のオーバラン防止機能
スタッカクレーン用トラバーサへの乗移り前のオーバラン防止機能をスタッカクレーンの脱輪を防止す
るために設けなければならない。乗移り前のスタッカクレーンのオーバラン防止機能は,次による。
10
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
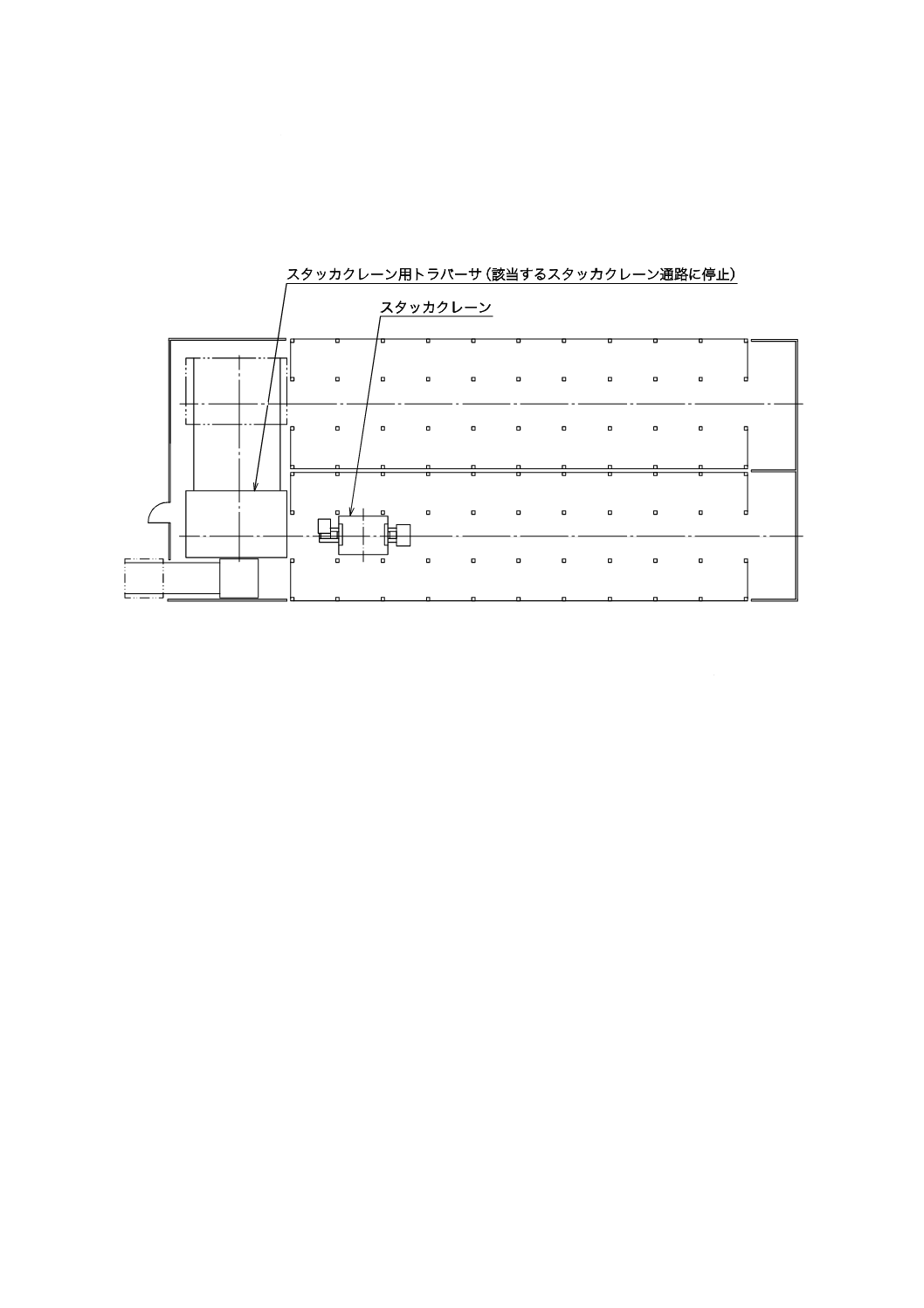
a) スタッカクレーン及びスタッカクレーン用トラバーサが各1台の場合 スタッカクレーン用トラバー
サが該当するスタッカクレーン通路にある場合に限り,スタッカクレーンは走行する。スタッカクレ
ーン走行中にスタッカクレーン用トラバーサが定位置を外れた場合は,スタッカクレーンは非常停止
する(図2参照)。
図2−スタッカクレーン及びスタッカクレーン用トラバーサが各1台の例
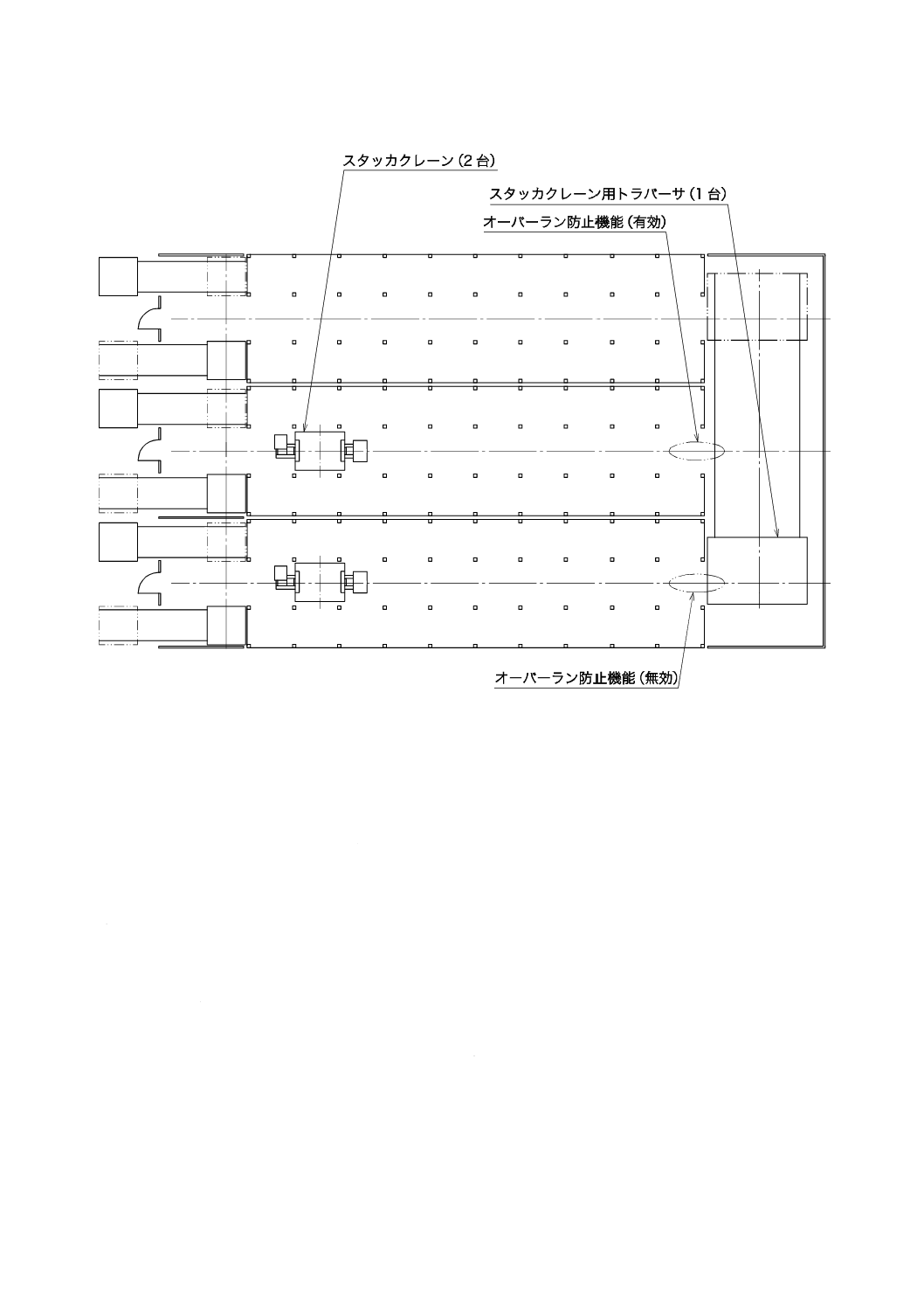
b) スタッカクレーン用トラバーサが1台に対し,スタッカクレーンが複数台の場合 該当するスタッカ
クレーン通路にスタッカクレーン用トラバーサが接続されていない状態では,スタッカクレーンがス
タッカクレーン用トラバーサの通路にオーバランしないように走行範囲を制限する。さらに,乗移り
部に,7.2で規定されたオーバラン防止機能を設けるものとする(図3参照)。オーバラン防止機能は,
スタッカクレーンがスタッカクレーン用トラバーサへ移動,又はその逆の移動を妨げない機能とする。
11
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3−スタッカクレーン2台及びスタッカクレーン用トラバーサ1台の例
11 電源
11.1 給電装置
交流電源は,JIS B 9960-1の4.3(電源)及びJIS B 9960-32の4.3(電源)に従わなければならない。
スタッカクレーンの給電装置は,単一電源に接続されることが望ましい。
11.2 接触給電
接触給電は,感電及び落下物による短絡を防止できる構造としなければならない。接触給電は,次によ
る。
a) 接触給電は,感電防止の覆いが設けられているもの[例 絶縁トロリー(JIS C 3711参照)又はトロ
リーバスダクト(JIS C 8373参照)]とする。
b) 接触給電線の開口部は,下向き又は横向きとする。
11.3 移動ケーブル
移動ケーブルは,可とうケーブル(JIS B 9960-1又はJIS B 9960-32参照)を用いなければならない。さ
らに,移動に伴うケーブルの損傷を防止するための防護措置を施すものとする。
11.4 電源断路器
電源回路を遮断するために,給電装置の受電側に電源断路器を設けなければならない。
12
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12 制御
12.1 制御機器一般
12.1.1 一般要求事項
電気・制御機器関係は,JIS B 9960-1,JIS B 9960-32及びJIS C 0508-1〜JIS C 0508-7に適合しなければ
ならない。制御機器の安全関係機能は,JIS B 9705-1及びJIS B 9961に従って設計する。
12.1.2 停止動作
停止機能は,JIS B 9960-1の9.2(制御機能)及びJIS B 9960-32の9.2(制御機能)に従って,必要な機
能(停止カテゴリ0,1又は2)を備え,起動機能に優先して作動させなければならない。停止機能に対す
る要求事項は,JIS B 9700-1,JIS B 9700-2及びJIS B 9702に従って機械安全リスクアセスメントを実施し,
その結果による。
12.1.3 非常停止
非常停止機器の設計原則は,JIS B 9703,JIS B 9960-1及びJIS B 9960-32による。
非常停止の停止カテゴリは,停止カテゴリ0又は停止カテゴリ1とする。停止カテゴリの選択は,JIS B
9700-1,JIS B 9700-2,JIS B 9702に従って機械安全リスクアセスメントを実施し,その結果によって決定
する[JIS B 9960-1の9.2(制御機能)参照]。ただし,昇降装置についてはJIS B 9960-32の9.2(制御機
能)による。
非常停止機能は,全ての運転モードにおいて他の機能及び操作に優先する。非常停止後の再起動は,非
常停止条件の排除後に再起動操作されるまで,いかなる起動信号も有効となってはならない。
地上側に設置する非常停止機器は,JIS B 8942の7.4.3(非常停止機器)による。
スタッカクレーンを停止させるための非常停止機器は,少なくとも次の位置に設置する。
a) 機上操作盤
b) 運転室及び昇降式点検室
c) 地上制御盤及び/又は地上操作盤
12.1.4 操作回路
操作回路に使用する電磁接触器は,JIS B 9960-1及びJIS B 9960-32に適合しなければならない。さらに,
操作回路で地絡した場合に閉路されるおそれがある場合は,次のように接続する。
a) コイルの一端を,接地側の電線に接続する。
b) コイルと接地側の電線との間には,開閉器を設けない。
12.1.5 電磁両立性
制御回路及び電源回路は,電磁ノイズによって,作業者に危険が及ぶような機械の誤動作が生じないよ
うにしなければならない(JIS C 61000-6-1及びJIS C 61000-6-2参照)。
12.1.6 レーザ光線
スタッカクレーンに使用するレーザ光線機器は,JIS C 6802に適合するとともに,その光路は作業者の
目の高さを避けるように設置しなければならない。
12.2 動作に関するインタロック機能
12.2.1 一般
インタロック機能を含む保護機能は,容易に無効化できない構造とする。インタロック機能による異常
停止後の再起動は,停止条件の排除後に再起動操作されるまで,いかなる起動信号も有効となってはなら
ない。
12.2.2 稼動範囲への進入扉開閉検出
13
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
稼動範囲への進入扉開閉検出は,JIS B 8942の7.3.1(設備稼動範囲立入時の運転停止機能)に適合し,
進入扉開時にはスタッカクレーンは非常停止しなければならない。
12.2.3 各動作間のインタロック機能
スタッカクレーンは,各動作間のインタロック機能を設けなければならない。各動作間のインタロック
機能は,次による。
a) フォーク装置が中央に位置しない場合は,走行動作を禁止し,走行動作中はフォーク装置の動作を禁
止する。
b) フォーク装置が中央に位置しない場合及びフォークストローク出限にない場合は,昇降動作を禁止し,
昇降動作中はフォーク装置の動作を禁止する。さらに,フォークストローク出限で昇降動作を行う場
合の範囲は必要最小限とし,この範囲を超える昇降動作を禁止する。
c) フォーク装置動作開始時は,走行及び昇降の停止位置にずれがある場合を検知し,フォーク装置の動
作を禁止する。
12.2.4 荷の状態に関するインタロック機能
スタッカクレーンは,荷の状態に関するインタロック機能を設けなければならない。荷の状態に関する
インタロック機能は,次による。
a) 二重格納防止機能は,格納予定位置に荷が格納されている状態を検知した場合に,フォーク装置の動
作を禁止する。
b) 荷位置異常検知機能は,フォーク装置が中央に戻ったときに,荷のフォーク装置動作方向の位置ずれ
を検知し,異常の場合には走行及び昇降動作を禁止する。
c) 荷姿異常検知機能は,最大荷姿寸法以上の荷を検知し,異常の場合にはフォーク装置の動作を停止す
る。
12.3 運転モード切替
12.3.1 運転モード切替キースイッチ
地上操作盤と機上操作盤との運転モード切替キースイッチは,スタッカクレーン可動範囲内での操作中
に,他の人が地上操作盤でスタッカクレーンの動作に関する全ての操作ができないように設けなければな
らない。運転モード切替キースイッチは,キーを差し,運転モードを切り替えた地上操作盤又は機上操作
盤に限り操作を許可する。ただし,非常停止機器の操作は除く。
運転モード切替キースイッチのキーは,次による。
a) 地上操作盤と機上操作盤とで,同一のキーを用いる。
b) キーは,スタッカクレーンごとに独立したものを用いる。
c) キーの抜差しは,該当する盤からの操作が無効となる状態に限り可能とする。
12.3.2 手動運転からの切替
手動運転から,遠隔自動運転又は自動運転への切替は,次による。
a) 手動運転から,遠隔自動運転又は自動運転への切替時に使用する運転モード切替キースイッチ及び起
動装置を備える地上操作盤は,該当するスタッカクレーンの稼動範囲外(侵入防止柵外など)に設置
する。
b) キーを地上操作盤の運転モード切替キースイッチに差込み後に起動操作を行わない限り,いかなる運
転モードの切替及び起動信号も有効となってはならない。
c) 手動運転からの切替時には,周囲の人への注意を喚起する警報(ブザー,チャイムなど)を自動的に
鳴らすものとする。
14
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.4 手動操作機器の操作
12.4.1 共通事項
機上操作盤及び可搬式操作盤の共通事項は,次による。
a) 操作スイッチの配置 操作盤上のスイッチは,そのスイッチの機能が分かりやすく表示され,操作方
向と動作方向は,一致するように配置する(JIS B 8823-1及びJIS C 0447参照)。
b) イネーブル機器を備えたホールド・ツゥ・ラン操作装置 スタッカクレーンの走行,昇降及びフォー
ク装置の操作装置は,JIS B 9960-32に従ったイネーブル機器を備えたホールド・ツゥ・ラン操作装置
とし,操作している人が両手で操作している間だけ走行,昇降及びフォーク装置の動作が可能で,操
作している人が手を離した場合には停止しなければならない。
c) 照明 スタッカクレーン通路上の操作場所は,JIS Z 9110に従って作業を安全に行うための必要な照
度を操作時に確保する。
12.4.2 手動操作時の速度制限
手動操作時の走行速度及び昇降速度は,操作する人に危険を及ぼさない速度に制限しなければならない。
スタッカクレーンに固定された運転室又は昇降式点検室からは,荷台上の荷が直接見えない場合があるた
め,手動操作時の速度を制限する。床上での手動操作時は,スタッカクレーン稼動範囲内にいる人のスタ
ッカクレーンとラックとの間の挟まれ,及びスタッカクレーンとの衝突を想定し,手動操作時の速度を制
限する。制限される速度は,表2による。ただし,人荷昇降式スタッカクレーンの荷台上の運転室での手
動操作時は,走行速度及び昇降速度の制限はしない。
表2−手動操作時の速度制限
単位 m/s
操作条件
荷台
昇降速度
昇降式点検室
昇降速度
スタッカクレーン
走行速度
人荷昇降式スタッカクレーン
荷台上の運転室での手動操作
制限なし
−
制限なし
スタッカクレーンに固定された
運転室での手動操作
0.2
−
0.5
昇降式点検室での手動操作
0.2
0.2
0.5
床上での手動操作
0.05
−
0.05
12.4.3 機上操作盤
機上操作盤は,次による。
a) 操作面の高さは,操作する人の位置から操作しやすい高さとする。
b) 注意を喚起するために人が操作する警報装置(ブザーなど)を備えるものとする。ただし,床上で操
作し,スタッカクレーンの走行とともに操作する人が移動する場合は,この限りではない。
12.4.4 可搬式操作盤
スタッカクレーンの床上手動操作用の可搬式操作盤は,次による。
a) 有線式 有線式の可搬式操作盤のケーブル,コネクタなどは,損傷による誤作動を防止するため,十
分な強度及び耐摩耗性をもつものとする[JIS B 9960-1の10.1.5(携行式操作盤,ペンダント形操作盤),
JIS B 9960-1の12.6(可とうケーブル)及びJIS B 9960-32の10.1.5(携行式操作盤及びペンダント形
操作盤)を参照]。さらに,損傷による断線又は短絡が発生した場合は,危険側に誤作動させないもの
15
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
とする。
b) 無線式 有線式でない場合は,可搬式操作盤とスタッカクレーンとは対とし,そのスタッカクレーン
以外のスタッカクレーンが誤作動しない機能とする[JIS B 9960-1の9.2.7(ケーブルレス制御)及び
JIS B 9960-32の9.2.7(ケーブルレス制御)を参照]。
12.4.5 操作位置
運転室内及び昇降式点検室内の操作機器は,操作する人があらかじめ定められた位置にいるときに限り
操作可能な機能とする。
手動操作する場所は,操作する人から直接機械の動作が見えるように考慮しなければならない。
13 安全対策
13.1 機械安全リスクアセスメントの実施
設計時には,作業する人の安全確保のために,JIS B 9700-1,JIS B 9700-2及びJIS B 9702に従って機械
安全リスクアセスメントを実施する[JIS B 8942の附属書B(危険源,危険状態及び対策に関連する事項)
参照]。
13.2 昇降設備
スタッカクレーン又は周辺設備には,次の目的のための人が安全に移動できる手段を設けるものとする。
はしご,階段,歩道及び作業床は,JIS B 8826-1に適合しなければならない。
a) 荷台上の状態確認のためのスタッカクレーン上の上下移動(はしご,昇降式点検室など)
b) 運転室又は昇降式点検室のスタッカクレーン上の乗降(はしご,階段など)
c) スタッカクレーンの保守点検作業に必要な移動(はしご,階段など)及び作業
13.3 安全帯取付け金具
安全帯取付け金具は,墜落のおそれのある高所作業が行われる位置に設けるものとする。ただし,JIS B
9713-1〜JIS B 9713-4に従った常設設備,運転室又は昇降式点検室のように,明らかに墜落の危険がない
場所においては,設ける必要はない。
13.4 固定式ガードの取付け
侵入防止柵内で操作する人が触れる可能性のある危険な部分(回転部,駆動部など)には,JIS B 9716
に従って巻込まれを防止する固定式ガードを取り付けなければならない。
14 表示
14.1 スタッカクレーンに関する表示
スタッカクレーンには,見やすい位置に次の表示をする。
a) 最大荷姿寸法
b) 定格荷重
c) つり上げ荷重
d) 搭乗定員(運転室又は昇降式点検室をもつスタッカクレーンの場合)
e) 製造年月(工場製造時)
f)
製造業者名
14.2 運転状態の表示
スタッカクレーン稼動範囲外に,スタッカクレーンの運転状態(自動,手動,異常など)が分かる装置
を設置する。
16
B 8943:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
14.3 安全に関する表示
安全に関する表示は,次による。
a) 操作に関する注意事項 機上操作盤付近及び地上操作盤付近に,操作時の注意事項を表示する。
b) 点検作業に関する注意事項 進入扉付近に,保護具の使用を含めた注意事項を表示する。
c) 安全帯使用指示 墜落のおそれのある高所作業が行われる位置又はその位置へ行くための経路に表示
する。安全帯取付け金具には,用途を表示する。
d) 非常脱出手順 運転室又は昇降式点検室の非常脱出装置付近に表示する。
参考文献 JIS B 8823-1 クレーン−操作装置−操作レバー等の配置及び操作方法−第1部:一般
JIS C 0447 マンマシンインタフェース(MMI)−操作の基準
JIS C 3711 絶縁トロリーシステム
JIS C 8201-5-1 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第1節:電
気機械式制御回路機器
JIS C 8373 トロリーバスダクト
JIS C 61000-6-1 電磁両立性−第6-1部:共通規格−住宅,商業及び軽工業環境におけるイミ
ュニティ
JIS C 61000-6-2 電磁両立性−第6-2部:共通規格−工業環境におけるイミュニティ
ISO 13849-2,Safety of machinery−Safety-related parts of control systems−Part 2: Validation
EN 528,Rail dependent storage and retrieval equipment−Safety requirements