B 8443 : 2000 (ISO 14539 : 2000)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本ロボット工業会 (JARA) から
工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,通
商産業大臣が制定した日本工業規格である。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。通商産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
JIS B 8443には,次に示す附属書がある。
附属書A(参考) グリッパの特性を表示する様式
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8443 : 2000
(ISO 14539 : 2000)
産業用マニピュレーティングロボット
−把握型グリッパによる対象物
ハンドリング−用語及び特性の表し方
Manipulating industrial robots
−Object handling with grasp-type grippers
−Vocabulary and presentation of characteristics
序文 この規格は,2000年に発行されたISO 14539,Manipulating industrial robots−Object handling with
grasp-type grippers−Vocabulary and presentation of characteristicsを翻訳し,技術的内容及び規格票の様式を変
更することなく作成した日本工業規格である。
この規格の原国際規格は,産業用マニピュレーティングロボット(以下,ロボットという。)に関するISO
規格の一つである。他の規格では,用語,特性一般,座標系,性能項目及び試験方法,安全性,ロボット
プログラミング言語などの項目を扱っている。これらのISO規格は,相互に関連をもつとともに,他の分
野のISO規格とも関連している。
ロボットによる対象物ハンドリングは,自動生産におけるロボットの使用が広まるにつれて,着実に多様
化しつつある。この規格は,対象物ハンドリングを理解し計画するため,及び把握型グリッパの特性を表
示するための用語を与える。
対象物ハンドリングの成功は,ロボットとエンドエフェクタの両者の協調によって達成されるものである。
ある場合には,ロボットの腕や手首が対象物の位置決めに大きな役割を果たすし,他の場合には,適応制
御される指をもったエンドエフェクタが柔軟な対象物ハンドリングを可能とするであろう。
なお,この規格で点線の下線が施してある箇所は,原国際規格にはない事項である。
1. 適用範囲 この規格は,エンドエフェクタの機能に注目し,4.1.2.1に定義する把握型グリッパに重点
を置く。
この規格の本体は,対象物ハンドリングを記述する用語,及び把握型グリッパの機能,構造,要素に関
する用語を与える。
附属書A(参考)に,把握型グリッパの特性を表示する様式を示す。この附属書は,次のように用いる
ことができる。
a) エンドエフェクタ製造者は,製品の特性をロボット使用者に示すことができる。
b) ロボット使用者は,必要とするエンドエフェクタに対する要求事項を指定することができる。
c) ロボット使用者は,特定のロボットの用途における対象物及び対象物ハンドリングの特性を記述する
ことができる。
2
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この規格は,ロボットの定義には含まれない簡単なハンドリングシステム(ピックアンドプレース装置,
マスタスレーブ装置など)にも適用できる。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を示す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 14539 : 2000 Manipulating industrial robots−Object handling with grasp-type grippers−
Vocabulary and presentation of characteristics (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格のうちで,発効年を付記してあるものは,記載の年の版だけがこの規格の規定を構
成するものであって,その後の改正版・追補には適用しない。
JIS B 0134 : 1998 産業用マニピュレーティングロボット−用語
備考 ISO 8373 : 1994 (Manipulating industrial robots−Vocabulary) からの引用事項は,この規格の該
当事項と同等である。
JIS B 8436 : 1999 産業用マニピュレーティングロボット−メカニカルインタフェース−フランジ形
(A形)
備考 ISO 9409-1 : 1996 [Manipulating industrial robots−Mechanical interfaces−Part 1 : Plates (Form
A)] が,この規格と一致している。
JIS B 8437 : 1999 産業用マニピュレーティングロボット−座標系及び運動の記号
備考 ISO 9787 : 1998 (Manipulating industrial robots−Coordinate systems and motion nomenclatures)
が,この規格と一致している。
JIS B 8441 : 1996 産業用マニピュレーティングロボット−メカニカルインタフェース−シャフト形
(A形)
備考 ISO 9409-2 : 1996 [Manipulating industrial robots−Mechanical interfaces−Part 1 : Shafts (Form
A)] が,この規格と一致している。
3. 対象物ハンドリングに関する用語 この規格で用いる主な用語の定義は,JIS B 0134によるほか,次
による。
3.1
ハンドリングの種類
3.1.1
対象物 ロボットによる作業において,エンドエフェクタによって把持され,保持され,又は操ら
れる固体(非流体)の物体。
備考 対象物は様々な形,寸法をもち,ハンドリング中に変形されることもある。
3.1.2
対象物ハンドリング エンドエフェクタによる対象物に対する動作,又はエンドエフェクタによる
対象物の状態の維持。
3.1.3
把持 エンドエフェクタによる対象物の拘束。
3.1.4
把握 グリッパの指による対象物の拘束。
3.1.5
把握動作 指によって対象物に拘束を及ぼすグリッパの動き。
3.1.6
解放動作 対象物から拘束を取り除くグリッパの動き。
3.1.7
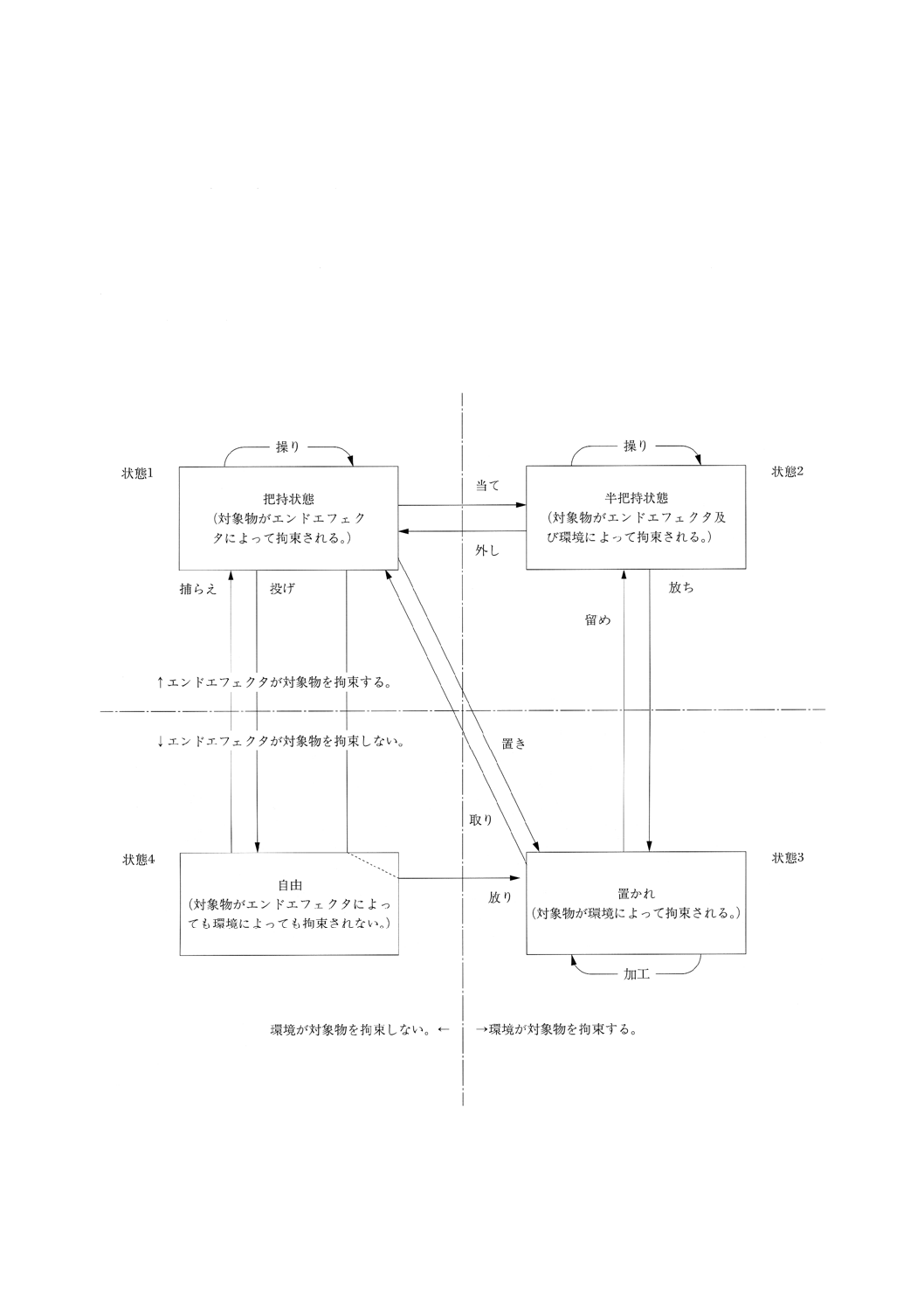
状態 対象物の拘束状態,及びその結果としての対象物のポーズ(図1参照)。
3.1.8
動作 対象物の状態の遷移(図1参照)。
3
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 動作には,異なる種類の状態の間での遷移もあれば,同じ種類の状態のなかでの遷移もある。
3.1.9
状態の種類
3.1.9.1
把持状態(状態1) 対象物が環境によってではなくエンドエフェクタによって拘束されている
状態。
3.1.9.2
半把持状態(状態2) 対象物がエンドエフェクタ及び環境によって拘束されている状態。
3.1.9.3
置かれ(状態3) 対象物がエンドエフェクタによってではなく環境によって拘束されている状
態。
3.1.9.4
自由(状態4) 対象物がエンドエフェクタによっても環境によっても拘束されていない状態。
備考 重力のような保存力による拘束は,環境による拘束の一部とは考えない。保存力による拘束は,
状態の種類を定義するのには関係しない。
備考 動作の名称は参考とする。
図1 対象物ハンドリングにおける状態と動作
3.2
把握
4
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.1
把握の種類
3.2.1.1
把握された対象物の自由度 指によって拘束された対象物の空間における動きの自由度。接触点
における摩擦を考慮して求めるもの,又は考慮しないで求めるものがある。
備考 この定義では,グリッパの動きはないものと想定する。グリッパが動く場合については,4.3.3
参照。
3.2.1.2
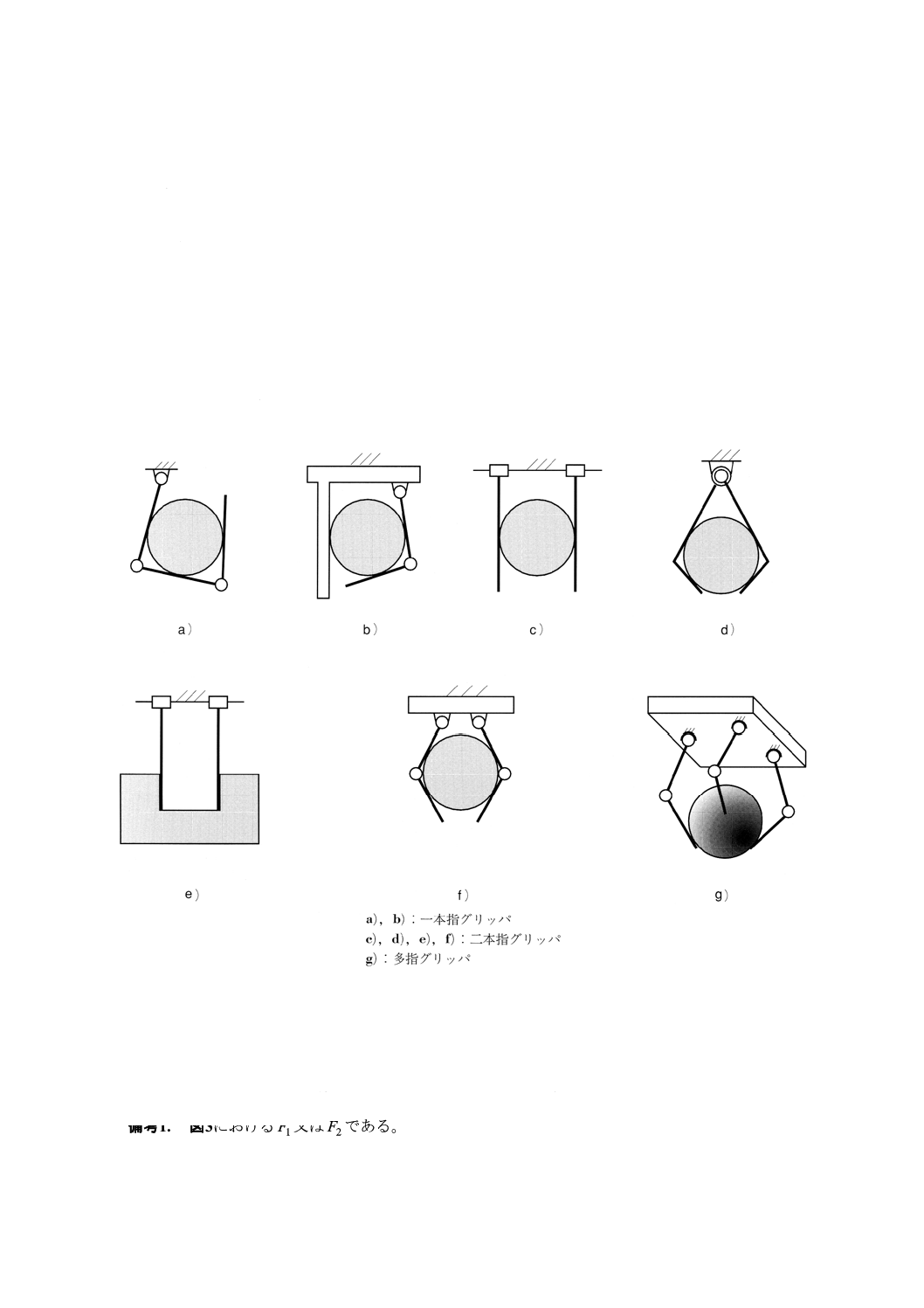
形状拘束把握 対象物の自由度が,接触点における摩擦を考慮しないで0以下である把握。
備考 形状拘束把握は,グリッパの姿容だけが対象物のポーズを決定する把握である。
3.2.1.3
力拘束把握 対象物の自由度が,接触点における摩擦を考慮しないで1以上であるが,接触点に
おける摩擦を考慮して0以下である把握。
備考 力拘束把握は,グリッパの姿容だけが対象物のポーズを決定する把握である。
3.2.1.4
外つかみ 対象物の外側表面に働く把握[図2a)〜d),f),g)参照]。
3.2.1.5
内つかみ 対象物の内側表面に働く把握[図2e)参照]。
図2 把握型グリッパによる典型的な把握
3.2.2
把握における力
備考 把握における力は,すべて静的な成分を含む動的な力と考える。これらの力は,外力や加速度
によって増減する。
3.2.2.1
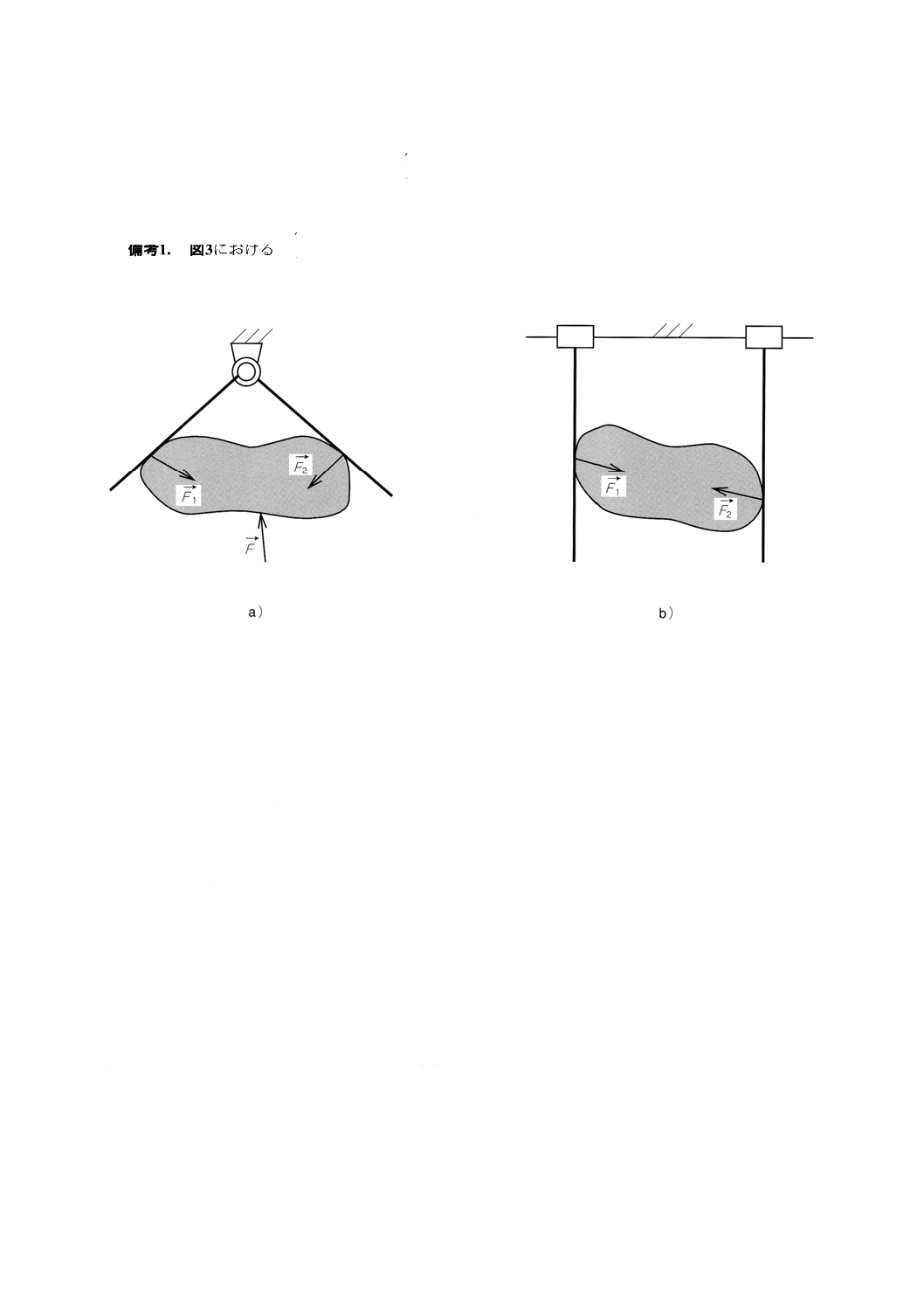
接触力 接触点,接触線,又は接触面を通して指から対象物に加えられる力。
備考1. 図3における1Fρ又は
2Fρである。
2. 接触力は,法線力及び摩擦力を含む。
5
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.2.2
操り力 指から対象物へ加えられるすべての力のベクトル和。
備考 操り力は,図3a)における
(
)
F
F
F
ρ
ρ
ρ
−
=
+
2
1
である。
3.2.2.3
把握力 接触力の大きさであり,接触点が2点である把握について,接触力以外の対象物に働く
力及びモーメントの合力が0であるという条件のもとで定義される。
備考1. 図3における(
)
2
1
F
F
ρ
ρ
−
=
の大きさ。
2. “接触力以外の対象物に働く力及びモーメント”は,外力,重力,慣性力及び接触点を通し
て働くモーメントを含む。
図3 把握における力
3.2.3
安定把握
3.2.3.1
把握安定性1) 外乱力を受けたために対象物の位置がわずかに変化した後で対象物がグリッパ
内の最初のポーズを回復するような把握状態。
3.2.3.2
把握安定性2) 対象物が外乱力を受けたときにグリッパの指が滑ることなく常に対象物との接
触を保つような把握状態。
3.3
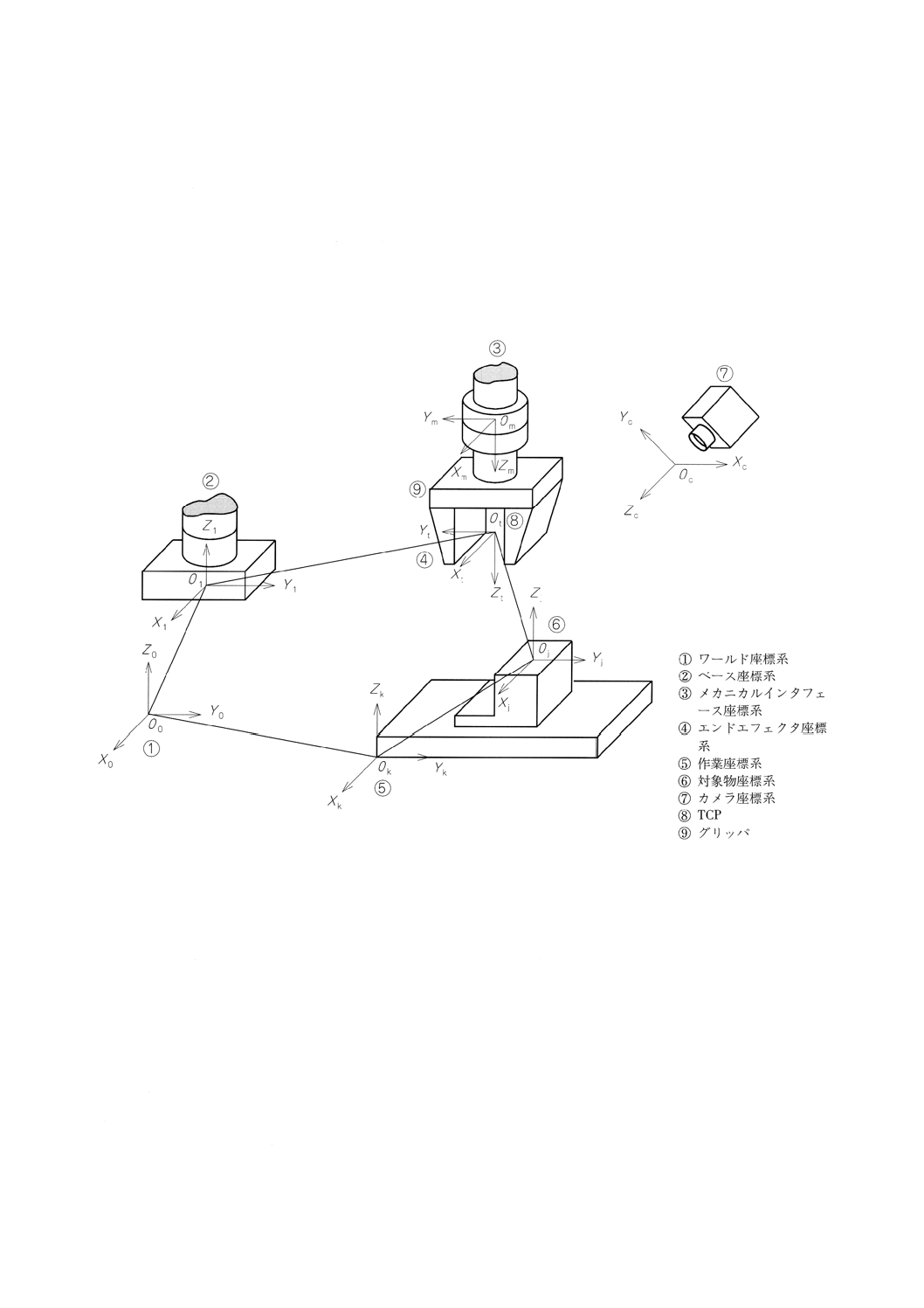
対象物ハンドリングにおける座標系(図4参照)
備考 ロボットの作業プログラミングにおいて,扱う対象物の位置及び姿勢を一連の座標系の上で記
述すると便利である。
3.3.1
ワールド座標系 ロボットの動きに独立な,地面に設定した静的な座標系であり,(JIS B 0134及
びJIS B 8437に定義するように)O0−X0−Y0−Z0と表記する。
3.3.2
ベース座標系 ロボットのベース取付面に設定した座標系であり,(JIS B 0134及びJIS B 8437に
定義するように)O1−X1−Y1−Z1と表記する。
3.3.3
メカニカルインタフェース座標系 メカニカルインタフェースに設定した座標系であり,(JIS B
0134及びJIS B 8437に定義するように)Om−Xm−Ym−Zmと表記する。
3.3.4
エンドエフェクタ座標系 メカニカルインタフェースに取り付けたエンドエフェクタに設定した
座標系であり,(JIS B 0134及びJIS B 8437に定義するように)Ot−Xt−Yt−Ztと表記する。
備考 エンドエフェクタ座標系は,メカニカルインタフェースに関連する。
3.3.5
作業座標系 作業場所に設定した座標系。Ok−Xk−Yk−Zkと表記する。
3.3.6
対象物座標系 対象物に設定した座標系。Oj−Xj−Yj−Zjと表記する。
6
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3.7
カメラ座標系 作業場を監視するセンサに設定した座標系。Oc−Xc−Yc−Zcと表記する。
備考 任意に置かれた対象物の位置,姿勢を検知するために視覚系を設置することがある。
3.3.8
エンドエフェクタ中心点 (TCP) (JIS B 0134に定義するように)与えられた用途についてメカ
ニカルインタフェースに関連して定義する点。
備考1. エンドフェクタ中心点は,(JIS B 8437に定義するように)エンドフェクタ座標系の原点であ
る。
2. エンドエフェクタ中心点は,対象物ハンドリングにとって重要な点として,製造者と使用者
の間で各エンドエフェクタについて定義される。
図4 対象物ハンドリングにおける座標系
3.4
対象物ハンドリングにおけるセンシング 信頼性の高い,複雑なハンドリング作業を達成するため
に,様々なセンシング信号が用いられる。次のものは,ハンドリングのフィードバック制御のためにグリ
ッパが備えることのあるセンシング機能である。
備考 対象物ハンドリングのためには,次のものの他にも複雑なセンシング機能がある。例えば,対
象物の位置・姿勢センシング,接触点センシング,対象物の外形センシング,指速度センシン
グなど。これらは個別に記述するものとする。
3.4.1
対象物存在検知 対象物の存在の検知は,次の状況で用いられる。
a) 把持される対象物が適切に置かれていることを確認するため。
b) 対象物が首尾よく把持されたことを確認するため。
c) 対象物が首尾よく解放されたことを確認するため。
3.4.2
指位置センシング 指の位置のセンシングは,次の状況で用いられる。
7
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) (サーボ制御のような)指の制御が指の位置情報を必要とする。
b) 対象物の大きさ又は形を把持によって計測する。
3.4.3
把握力センシング 対象物に加えられる把握力のセンシングは,次の状況で用いられる。
a) 例えば,ぜい(脆)弱な対象物ハンドリングにおけるように,把握力が指定されている。
b) 安定把握のために指の関節の制御を行う。
備考 把握力は,力センサ又は駆動電流から検知することができる。
3.4.4
外力センシング 外部から加えられる力及びトルクのセンシングは,次の状況で用いられる。
a) 対象物の重量を計測する。
b) グリッパ又は把持された対象物が,環境にある対象物又は障害物と接触したかどうか,若しくは離れ
たかどうかを検出する。
c) 挿入作業のように,対象物ハンドリングの制御が接触情報を必要とする。
備考 外部から加えられる力及びトルクは,力・トルクセンサによって又は指駆動電流から検出する
ことができる。
3.4.5
滑り検知 指と対象物との間の滑りのセンシングは,次の状況で用いられる。
a) 重すぎる対象物の把持又は持ち上げを避けるため。
b) 対象物のゆるい,不安定な把握を避けるため。
c) すべりを生じないために必要な最小の力で対象物を把持するため。
4. 把握型グリッパに関する用語 この規格で用いる主な用語の定義は,JIS B 0134によるほか,次によ
る。
4.1
エンドエフェクタの種類
4.1.1
工具型エンドエフェクタ ロボットの腕によって動かされ位置決めされる間にそれ自身が実際に
仕事をするエンドエフェクタ。
例 アーク溶接トーチ,スポット溶接ガン,サンダ,グラインダ,ばり取り機,ルータ,ドリル,ス
プレーガン,接着剤ガン,自動ねじ回し,レーザ切断ガン,ウォータジェットガン
4.1.2
グリッパ (JIS B 0134に定義するように)把持又は保持するように設計されたエンドエフェクタ。
備考 グリッパ,すなわち,工具型エンドエフェクタに対するグリッパ型エンドエフェクタは,対象
物を動かし又は置くために対象物を把持するエンドエフェクタである。
4.1.2.1
把握型グリッパ 指によって対象物を扱うグリッパ。
4.1.2.2
非把握型グリッパ 指によらずに対象物を扱うグリッパ。
備考 非把握型グリッパは,すくい,引っかけ,突き刺し,粘着,又は真空/磁気/静電吸着によっ
て対象物を扱う。
4.2
把握型グリッパの要素及び機構
4.2.1
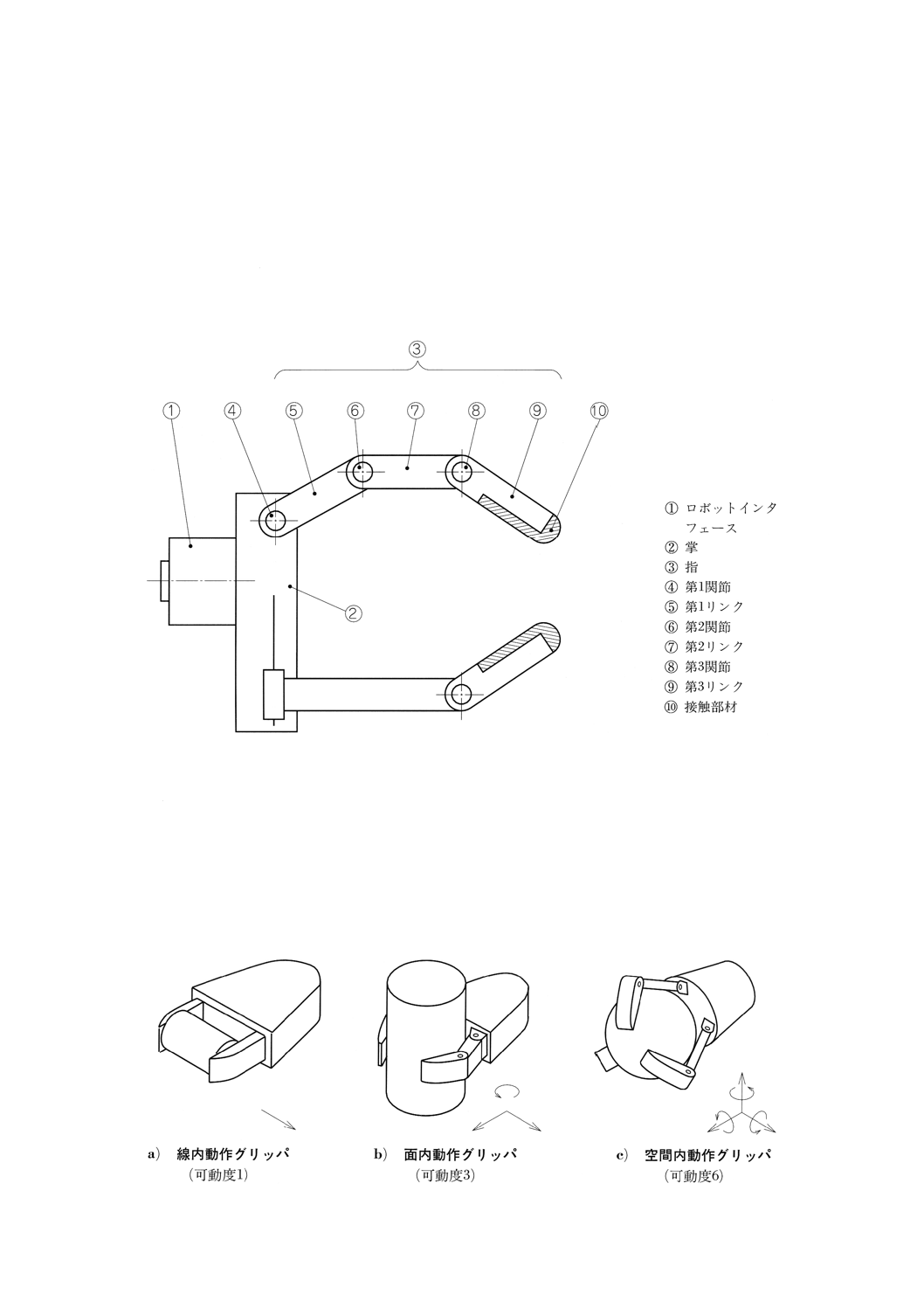
基本機構要素(図5参照)
4.2.1.1
ロボットインタフェース ロボットのインタフェースに対応するグリッパのインタフェース。
4.2.1.2
掌 グリッパの基本機構要素における,指の第1関節が取り付く固定部材。
備考 掌は直接対象物に接触してもよい。
4.2.1.3
指 運動学的連鎖構造であり,その第1関節が掌に取り付くもの。
備考 指は直接対象物に接触してもよい。
4.2.1.4
アクチュエータ 指を動かすのに用いる動力機構。
8
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例 電気モータ,電磁アクチュエータ,静電アクチュエータ,空気圧アクチュエータ,油圧アクチュ
エータ,超音波モータ,ゴムアクチュエータ,形状記憶合金,圧電アクチュエータ
4.2.1.5
動力伝達機構 駆動力をアクチュエータから指へ伝達する機構。
例 リンク伝達機構,ワイヤ伝達機構,歯車伝達機構,ねじ伝達機構,カム伝達機構,ばね伝達機構,
ダイレクトドライブ
4.2.1.6
接触部材 対象物に直接接触するように設計した指又は指のリンクの一部。
4.2.1.7
センサ 対象物ハンドリングにおいてグリッパの制御のために,グリッパや対象物から信号を得
る装置。
図5 グリッパの機構要素
4.3
把握型グリッパの種類
4.3.1
グリッパの可動度 グリッパの全部の指が掌に対して動く可動空間の並進と回転の座標軸数(図6
参照)。
備考1. グリッパの動きは,グリッパの可動度によって三つの区分,すなわち,線内動作,面内動作,
空間内動作に分けられる。例えば,図6a),b),c)に示されるグリッパの可動度はそれぞれ1,
3,6である。
2. 把握作業の計画の第一段階は,対象物の性質を考慮して可動度を選ぶことである。
9
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6 グリッパの可動度
4.3.2
グリッパの自由度 グリッパ機構の姿容を決定できる最小の入力の数。
4.3.3
対象物をもつグリッパの自由度 対象物をもつグリッパの自由度は,対象物をリンクとみなし,接
触点,接触線,接触面を等価な関節に置き換えて,グリッパの自由度と同様の方法で得られる。
4.3.4
角度開閉グリッパ 回転指をもつグリッパ。
4.3.5
平行グリッパ 互いに平行に動く並進指をもつグリッパ。
4.3.6
把握動作の種類
4.3.6.1
調心把握 対象物をグリッパの中心で把握するように,グリッパが自身の動きを調節する把握。
4.3.6.2
非調心把握 調心把握の機能をもたない把握。
4.3.6.3
適応把握 グリッパがその姿容を対象物の形に合うように調節する把握。
4.3.6.4
対称把握 指が対称な動きをする把握。
4.3.6.5
非対称把握 指が対称な動きをしない把握。
4.3.6.6
パワーグラスプ 形状拘束把握を構成するために,指だけではなく掌や腕も用いられる把握。
4.4
指の種類
4.4.1
指の可動度 指の可動空間の並進と回転の座標軸数。
4.4.2
指の自由度 指の姿容を決定できる最小の入力の数。
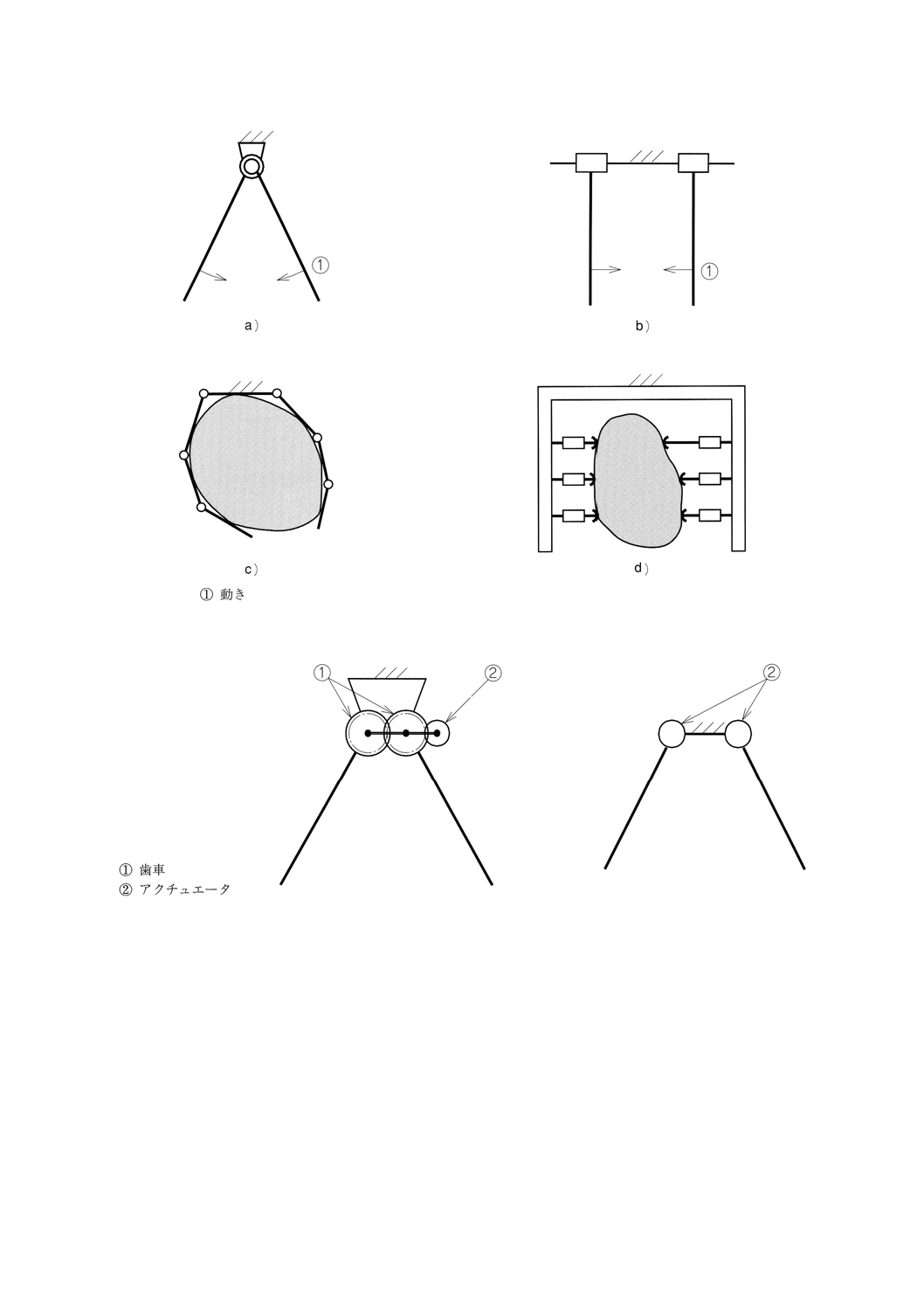
4.4.3
指の動きの種類
4.4.3.1
回転指 回転運動をする指[図7a)参照]。
4.4.3.2
並進指 並進運動をする指[図7b)参照]。
4.4.3.3
多関節指 多くの関節をもつ指[図7c)参照]。
4.4.3.4
膨縮指 空気圧でふくらむ指[図7d)参照]。
4.4.3.5
連動指 他の指の動きと機構的に関連して動く指[図8a)参照]。
4.4.3.6
独立指 他の指の動きと機構的に独立して動く指[図8b)参照]。
10
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図7 指の動き
図8 指の連動
4.5
指の制御
4.5.1
二値制御 指令が“開”か“閉”かのいずれかである制御方式。
4.5.2
位置制御 位置だけを指令する制御方式。
4.5.3
速度制御 速度を指令する制御方式。
4.5.4
力制御 力だけを指令する制御方式。
4.5.5
インピーダンス制御(コンプライアンス制御) 作業座標サーボ制御を実行するために,位置指令
と力指令を実際又は仮想の運動方程式を通して統合する制御方式。
4.5.6
ハイブリッド制御 関節座標サーボ制御を実行するために,作業座標系における位置指令と力指令
を,関節座標系におけるそれらに変換し,変換式を通して統合する制御方式。
11
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.6
接触部材
備考 接触部材は,対象物の性質に適合するように設計すべきである。
4.6.1
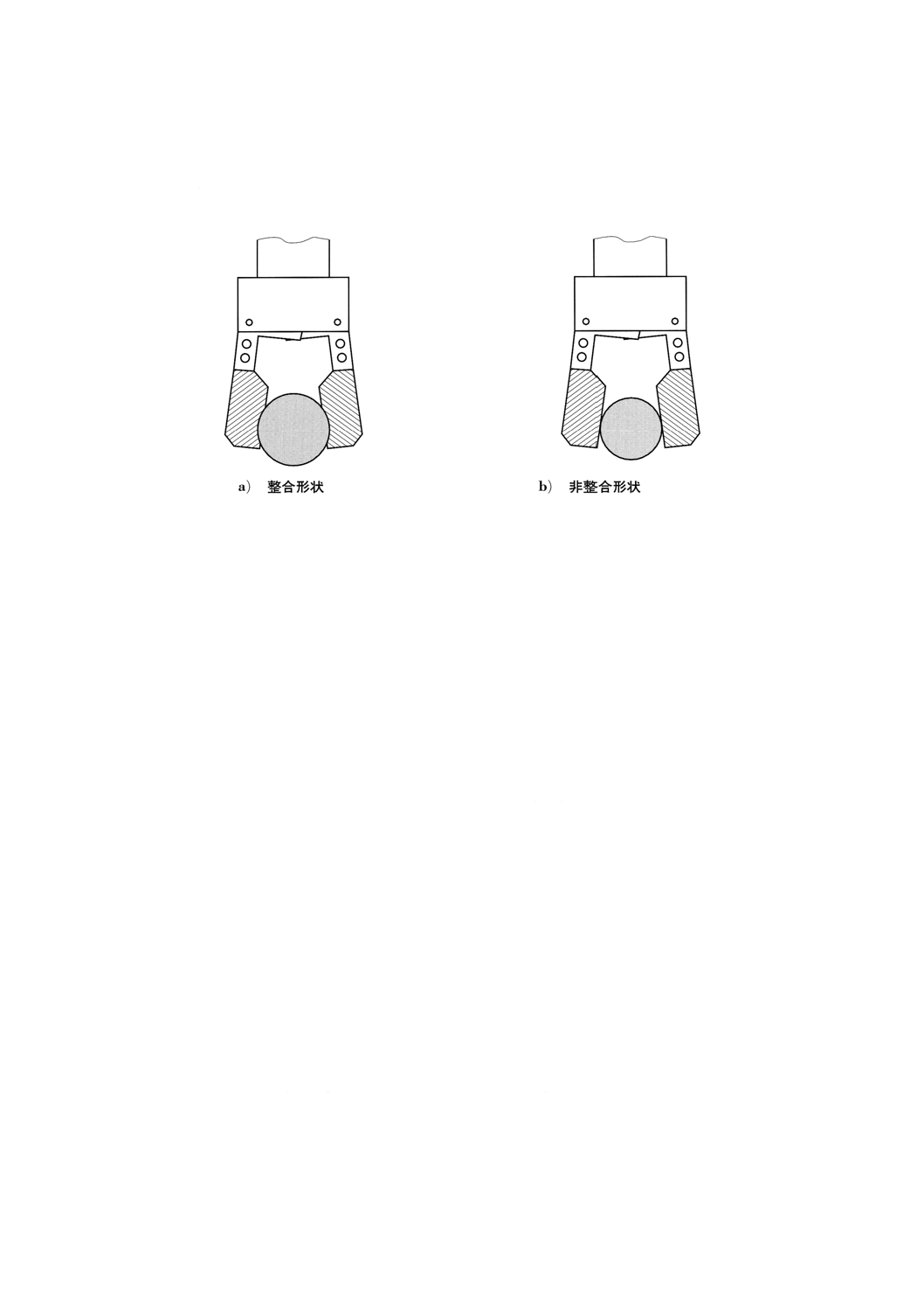
形状特徴(図9参照)
4.6.1.1
整合形状 把握する対象物の形に合うように設計した形をもつつかみ部材。
図9 接触部材の形状特徴
4.6.2
交換性 接触部材が,同じ種類の対象物を把握するために同じ種類の接触部材に取り替えることが
可能ならば,交換性がある。
備考 接触部材が,対象物ハンドリングの繰り返しでしばしば破損するならば,交換性をもつように
設計するとよい。
4.6.3
互換性 接触部材が,異なる種類の対象物を把握するために異なる種類の接触部材に取り替えるこ
とが可能ならば,互換性がある。
備考 グリッパが対象物の形状的,物理的性質の変化に適合するためには,接触部材に互換性をもた
せるとよい。
4.7
ロボットインタフェース ロボットインタフェースは,次のようなメカニカルインタフェースに適
合するとよい。
4.7.1
メカニカルインタフェース(フランジ形)(JIS B 8436参照)
4.7.2
メカニカルインタフェース(シャフト形)(JIS B 8441参照)
4.8
把握及び把握動作における安全性
4.8.1
フェールセーフ 何らかの一要素が故障した場合を予測して,安全性を維持するように設計した機
能。
4.8.2
自己保持 動力遮断の場合,受動要素によって,グリッパが把握した対象物を解放することを防ぐ
機構的機能。
4.8.3
セルフロック 動力遮断の場合,外力がグリッパに把握した対象物を解放するように働くことを防
ぐ機構的機能。
4.8.4
インタロック 条件に基づいて,特定の把握又は解放の動きを許可若しくは禁止する機能。
4.8.5
把握動作における安全性 不確実な把握を避ける機能。
備考 例として,重すぎる対象物の把持の自動的な回避や対象物の滑落を防ぐ自動的な力制御がある。
12
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(参考) グリッパの特性を表示する様式
この附属書A(参考)は,対象物を扱うグリッパの特性を表示する様式の例を示すものである。
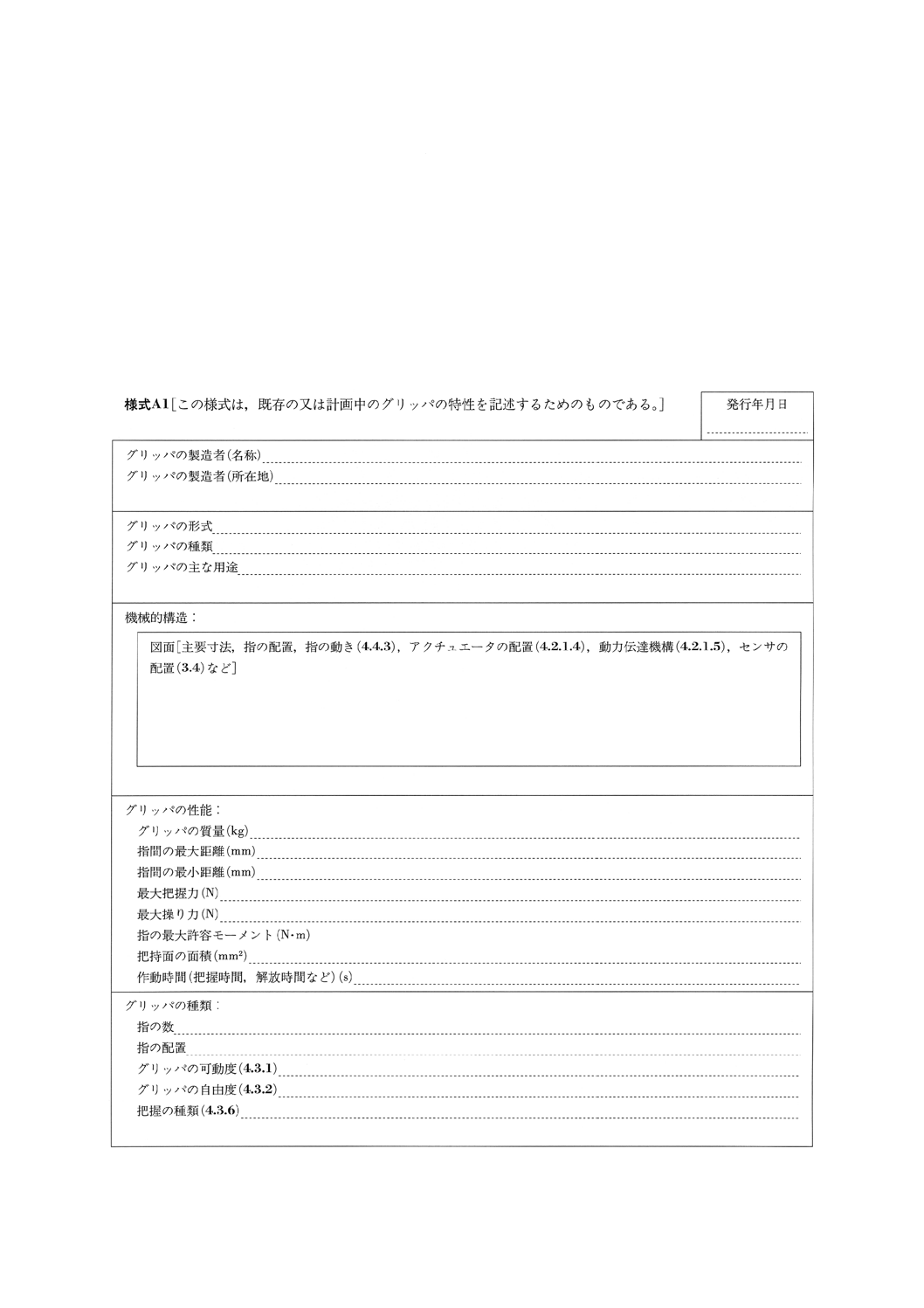
様式A1は,既存の又は計画中のグリッパの特性を表示するためのものである。グリッパ製造者は,様
式A1に従って製品の特性を記述することができる。
様式A2は,意図したロボットの用途のためのグリッパに対する要求事項を示すためのものである。ロ
ボット使用者は,様式A2に従って,グリッパに対する要求事項を指定することができる。
備考 括弧の中の数字は,本文における用語の番号に対応する。
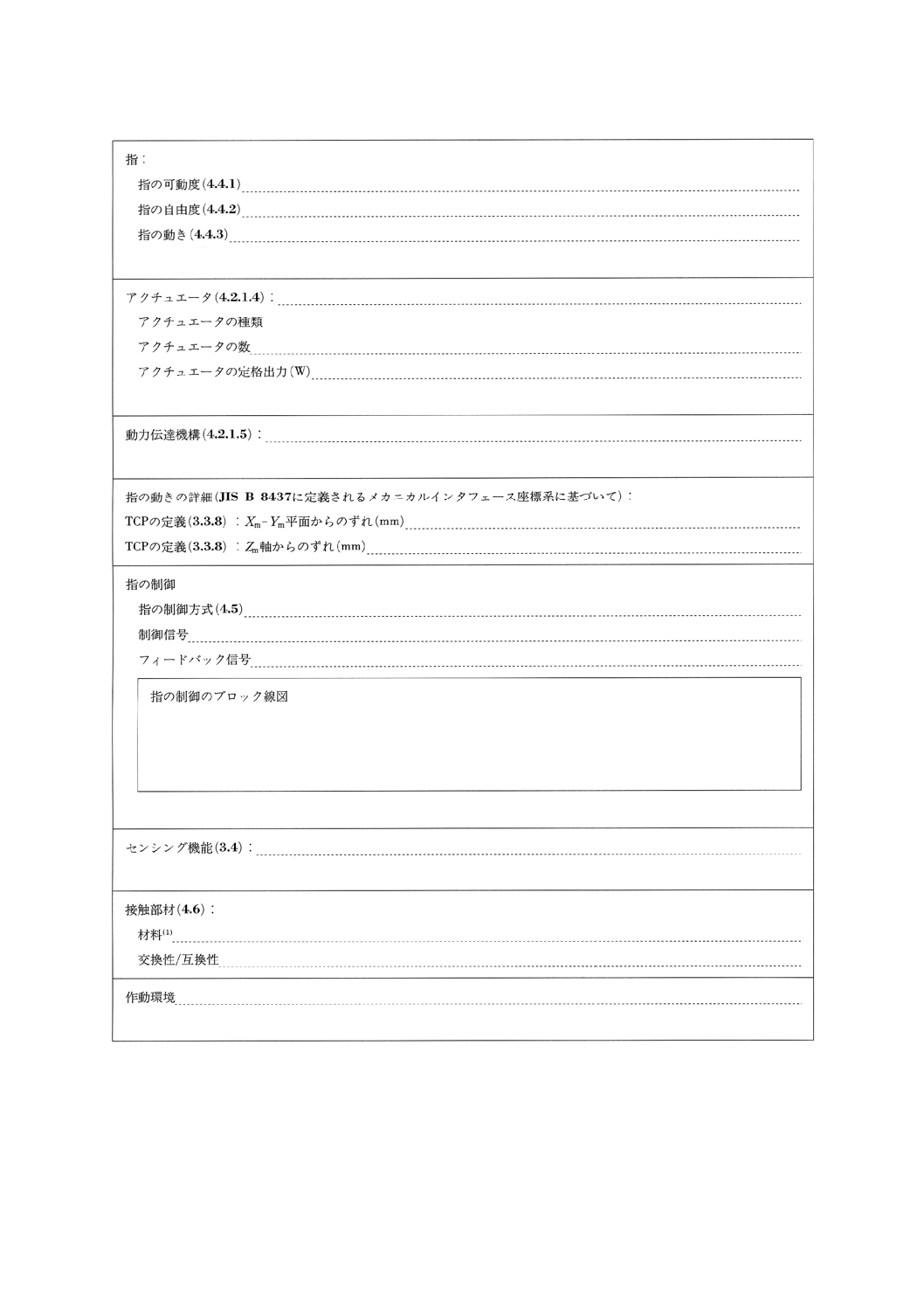
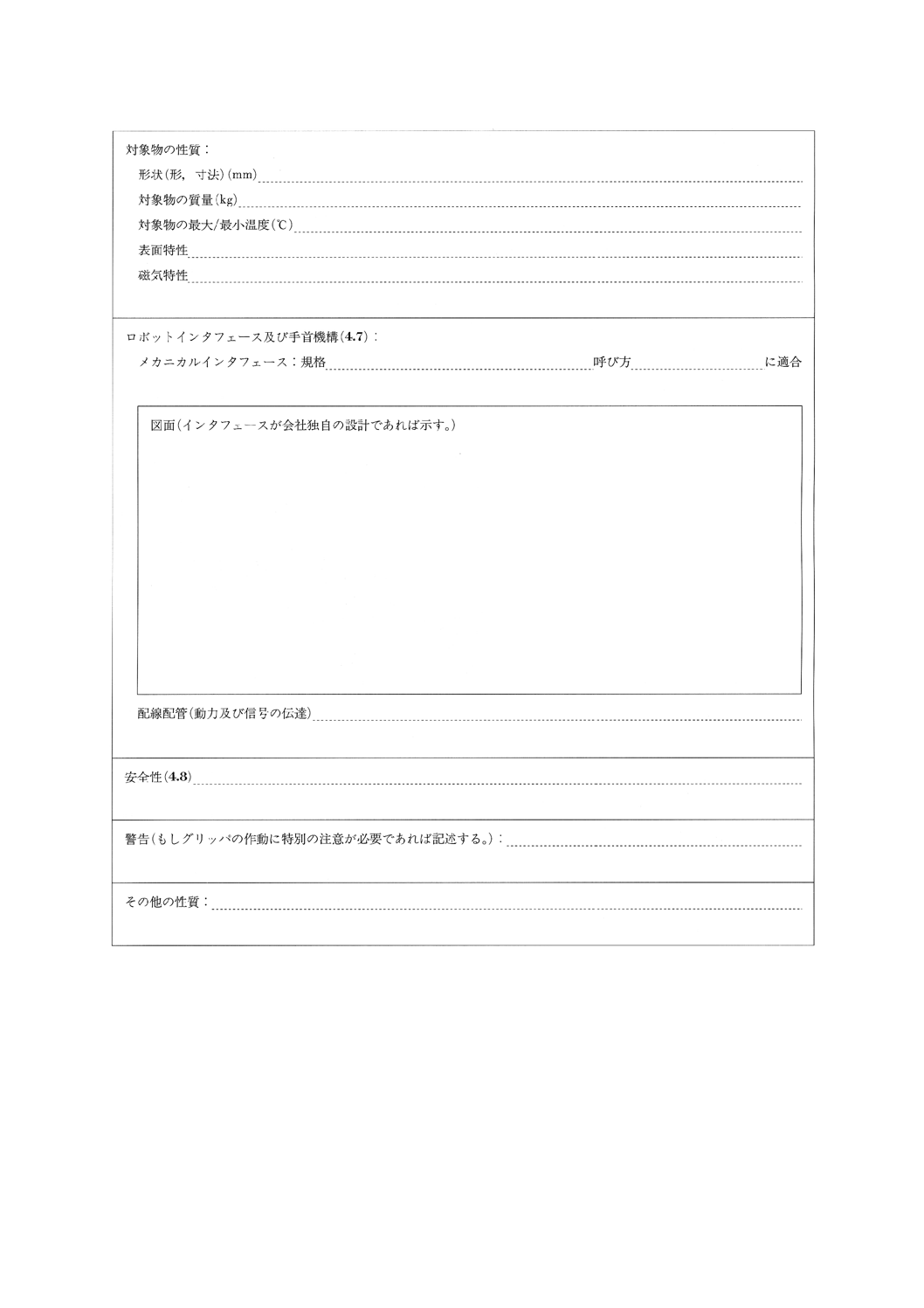
様式A1[この様式は,既存の又は計画中のグリッパの特性を記述するためのものである。]
13
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
14
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注(1) 接触部材は,対象物の形状的,物理的性質に適応するように弾性材料で作ってもよい。滑らかな表面をもつ
重い対象物を扱うには,粗い表面をもつ接触部材を用いるとよい。高温の対象物を扱うには,耐熱部材を用
いるとよい。磨耗を生じさせやすい表面をもつ対象物を扱うには,耐磨耗部材を用いるとよい。か(苛)酷
な環境条件で使用する場合には,耐腐食性材料を用いるとよい。
15
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
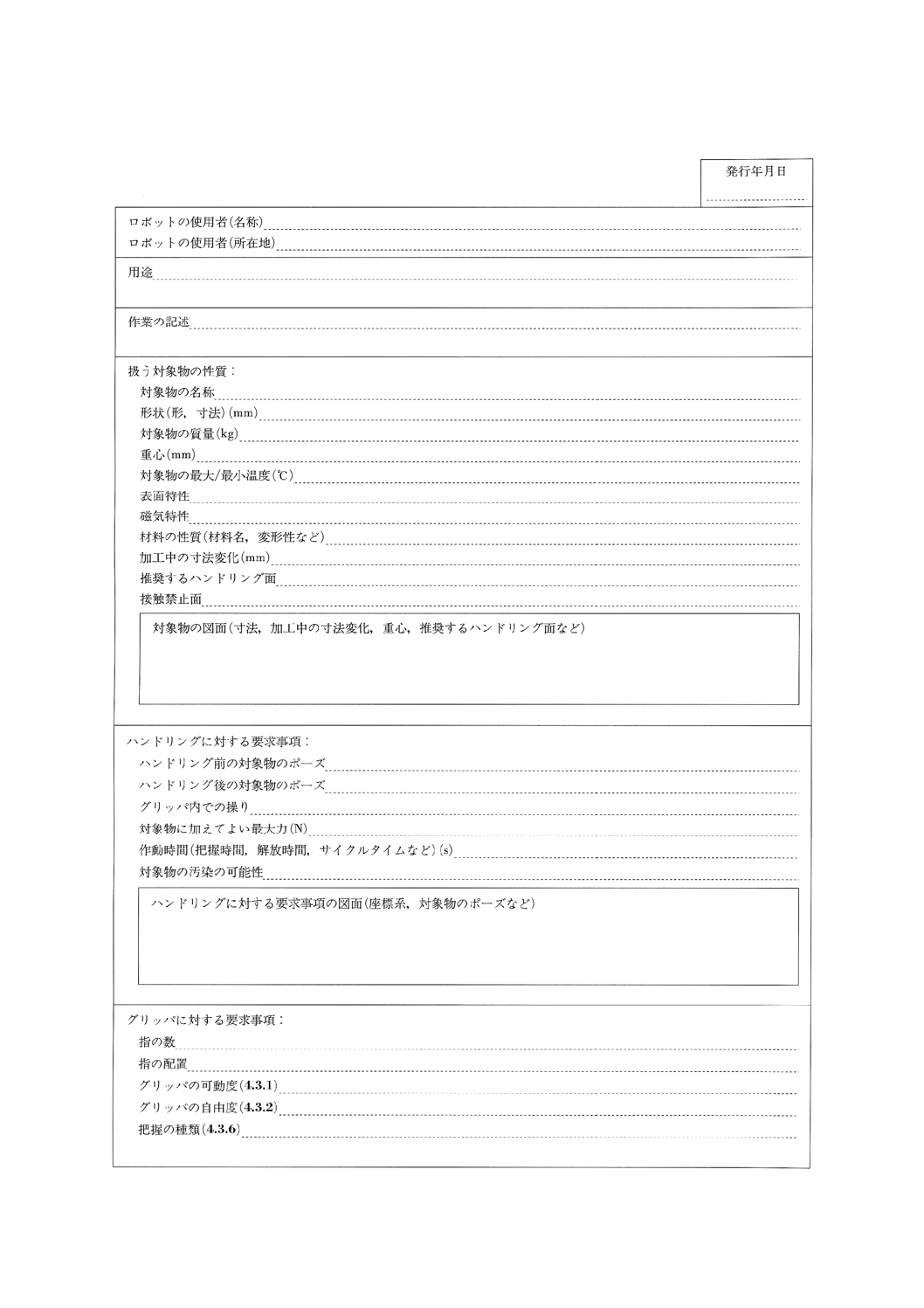
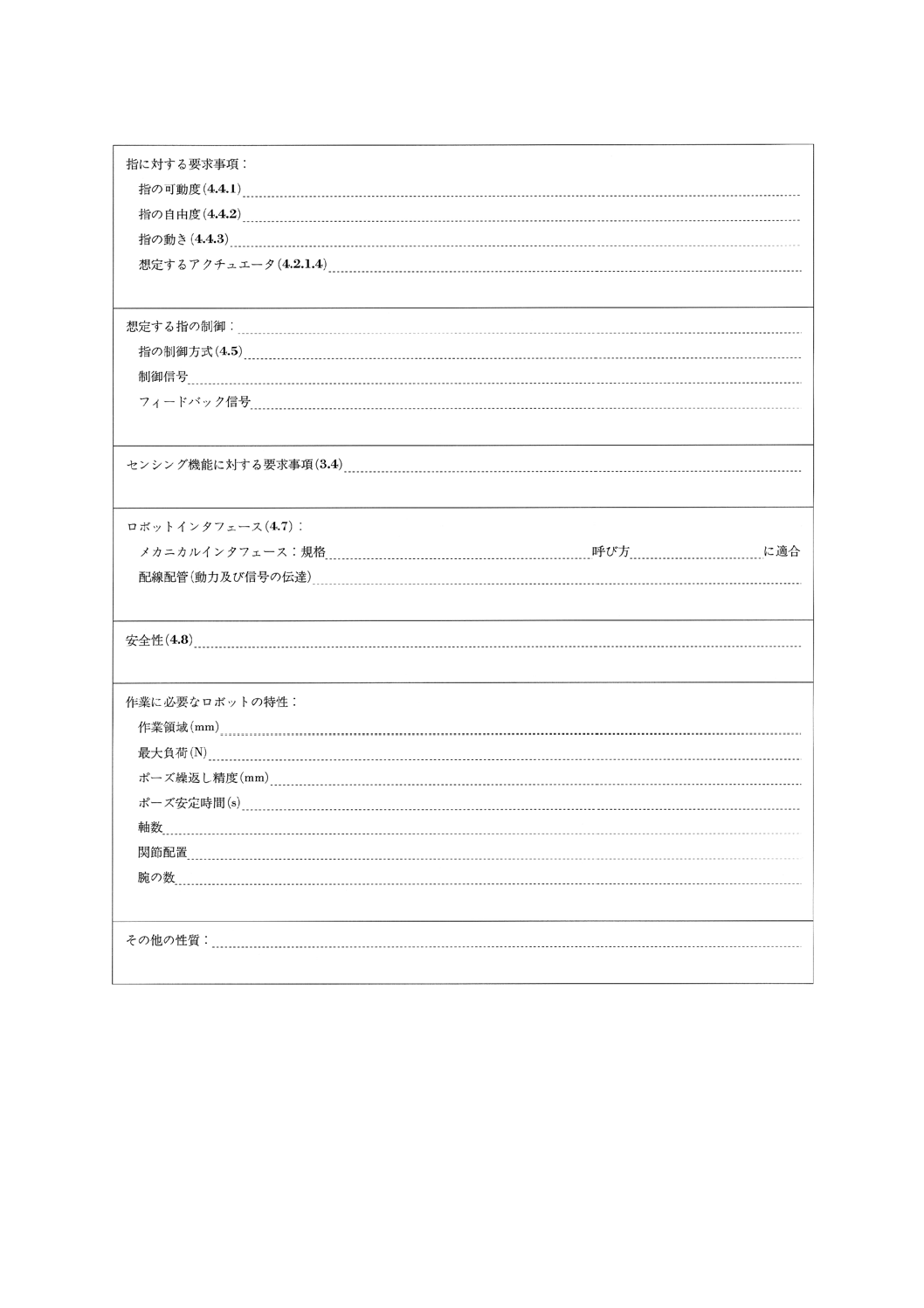
様式A2[この様式は,グリッパに対する要求事項を指定するためのものである。]
16
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
17
B 8443 : 2000 (ISO 14539 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
エンドエフェクタによる対象物ハンドリング等用語JIS原案作成専門委員会 構成表
氏名
所属
(委員長)
木 下 夏 夫
東京電機大学
谷 和 男
岐阜大学
小 澤 隆 保
武蔵工業大学
藤 田 昌 宏
通商産業省機械情報産業局
八 田 勲
工業技術院標準部
山 村 修 蔵
財団法人日本規格協会
髙 島 覺
財団法人機械振興協会
稲 垣 莊 司
技術士事務所“ロボティ”
黒 澤 豊 樹
黒澤R&D技術事務所
加 藤 久 喜
株式会社デンソー
堤 幹 夫
ビー・エル・オートテック株式会社
田 村 敏 功
ファナック株式会社
寺 内 常 雄
三菱電機株式会社
松 尾 健 治
株式会社安川電機
東 良 久
株式会社不二越