B 8397-2:2008 (ISO 4392-2:2002)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 2
4 記号······························································································································· 2
5 試験装置 ························································································································· 2
6 一定トルク法 ··················································································································· 4
7 一定圧力法 ······················································································································ 5
8 試験報告書 ······················································································································ 6
附属書A(規定)量記号 ········································································································ 7
附属書B(規定)測定精度の等級···························································································· 10
附属書C(規定)実用単位の使用方法 ····················································································· 11
B 8397-2:2008 (ISO 4392-2:2002)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本フル
ードパワー工業会 (JFPA) 及び財団法人日本規格協会 (JSA) から,工業標準原案を具して日本工業規格を
改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格で
ある。
これによって,JIS B 8397-2 : 2001は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認について,責任は
もたない。
JIS B 8397の規格群には,次に示す部編成がある。
JIS B 8397-1 第1部:一定低速及び一定圧力条件
JIS B 8397-2 第2部:起動特性
JIS B 8397-3 第3部:一定流量及び一定トルク条件
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8397-2:2008
(ISO 4392-2:2002)
油圧−モータ特性の決定方法−
第2部:起動特性
Hydraulic fluid power-Determination of characteristics of motors-
Part 2 : Startability
序文
この規格は,2002年に第3版として発行されたISO 4392-2を基に,技術的内容を変更することなく作
成した日本工業規格である。
1
適用範囲
この規格は,回転式油圧モータの起動特性を決定するための二つの方法について規定する。それは,一
定トルク法(箇条6参照)と一定圧力法(箇条7参照)という類似の方法であるが,得られた結果は同等
であることから,どちらが優位ということはない。
量記号は,附属書Aに規定する。
測定精度は,A,B及びCの3等級に分けて,附属書Bに規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 4392-2 : 2002,Hydraulic fluid power−Determination of characteristics of motors−Part 2 :
Startability (IDT)
なお,対応の程度を表す記号 (IDT) は,ISO/IEC Guide 21に基づき,一致していることを示
す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0125-1 油圧・空気圧システム及び機器−図記号及び回路図−第1部:図記号
注記 対応国際規格:ISO 1219-1,Fluid power systems and components−Graphic symbols and circuit
diagrams−Part 1 : Graphic symbols for conventional use and data-processing applications (MOD)
JIS B 0142 油圧及び空気圧用語
注記 対応国際規格:ISO 5598,Fluid power systems and components−Vocabulary (IDT)
JIS B 8385 油圧−ポンプ・モータ及び一体形トランスミッション−パラメータの定義及び文字記号
注記 対応国際規格:ISO 4391,Hydraulic fluid power−Pumps, motors and integral transmissions−
Parameter definitions and letter symbols (IDT)
JIS B 9939-1 油圧−測定技術−第1部:一般測定原則
注記 対応国際規格:ISO 9110-1,Hydraulic fluid power−Measurement techniques−Part 1 : General
2
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
measurement principles (MOD)
JIS B 9939-2 油圧−測定技術−第2部:管路における平均定常圧力の測定
注記 対応国際規格:ISO 9110-2,Hydraulic fluid power−Measurement techniques−Part 2 : Measurement
of average steady-state pressure in a closed conduit (MOD)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 0142によるほか,次による。
3.1
起動特性 (startability)
特定の負荷に対して起動するときの油圧モータの特性。
3.2
一定トルク時の起動 (start at constant torque)
油圧モータ軸の角変位をモータと負荷との間で測定するとき,圧力に対する角変位のこう配に急激な変
化があるその点。
3.3
一定圧力時の起動 (start at constant pressure)
油圧モータ軸の角変位をモータと負荷との間で測定するとき,トルクに対する角変位のこう配に急激な
変化があるその点。
4
記号
4.1
この規格で用いる量記号及び添字は,JIS B 8385及び表1による。
4.2
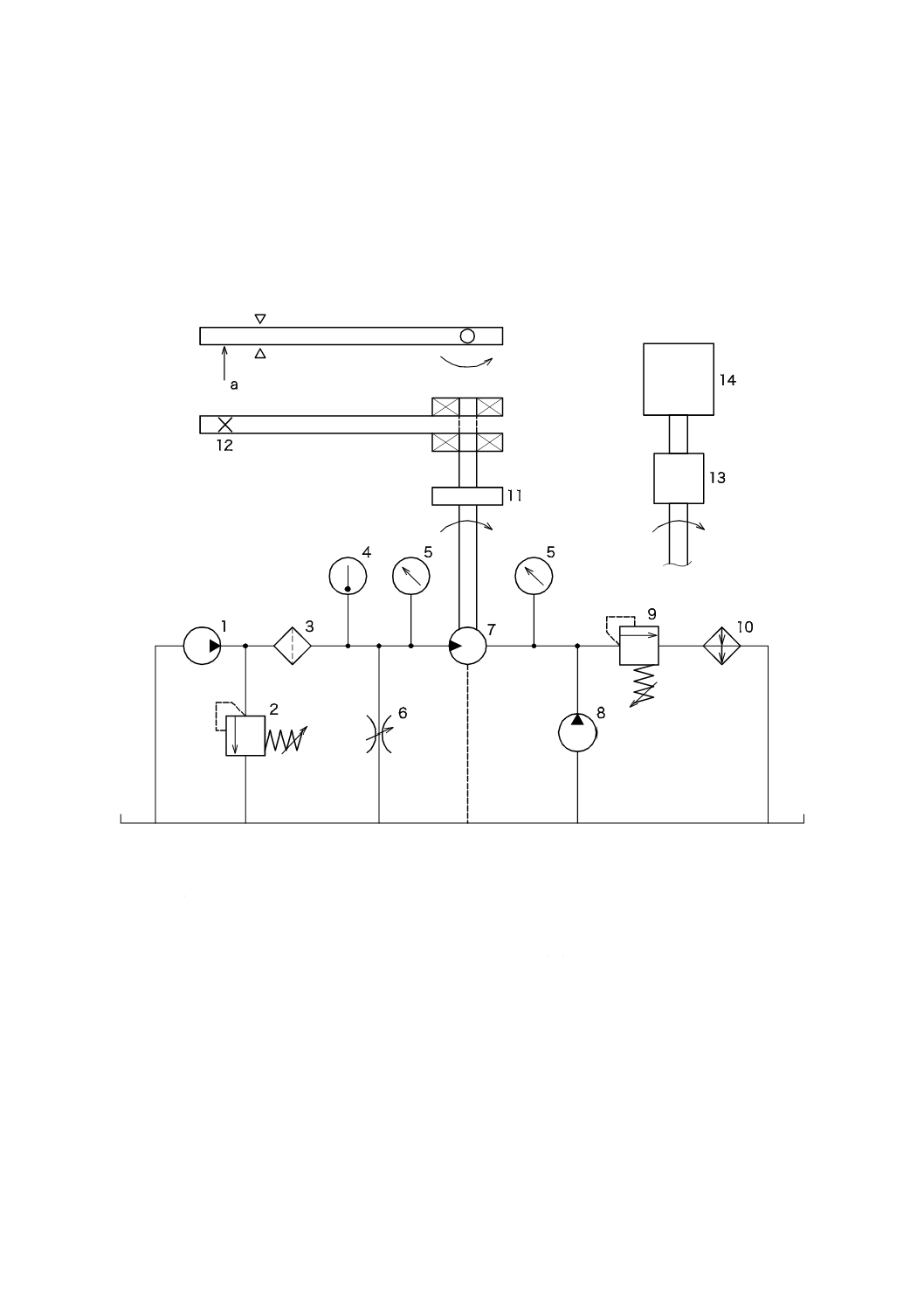
図1で用いる図記号は,JIS B 0125-1による。
表1−量記号及び単位
物理量
記号
次元a)
SI単位b)
圧力,差圧
p, Δp
ML−1T−2
Pa
トルク
T
ML2T−2
N・m
瞬間容積
v
L3
m3
時間
t
T
s
押しのけ容積
V
L3
m3
注a) M:質量 L:長さ T:時間
b) 実際の単位は,附属書Cを参照。
5
試験装置
5.1
油圧試験回路
5.1.1
図1に示すような試験回路を使用しなければならない。
この図は,構成機器に故障が生じた場合の回路破損を防止するために必要なすべての安全装置を示して
いない。試験を行う場合には,人及び機器装置を危険から守るために,十分な配慮をすることが重要であ
る。
注記 図1は,片方向回転モータを試験するための基本的な回路であるが,回路を変更すれば両方向
回転モータの試験にも適用できる。
3
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1.2
この回路には,供試モータ及び他の回路中の機器を保護するために必要なフィルタが組み込まれて
いなければならない。そして,モータ入口の流体温度は,50±2 ℃又は80±2 ℃のいずれかに保つ必要が
ある。
5.1.3
供試モータの接続ポートは,モータ軸回転方向がトルク負荷装置に対抗するように油圧回路に接続
しなければならない。
5.1.4
最高試験圧力は,モータ製造業者の推奨値を超えてはならない。
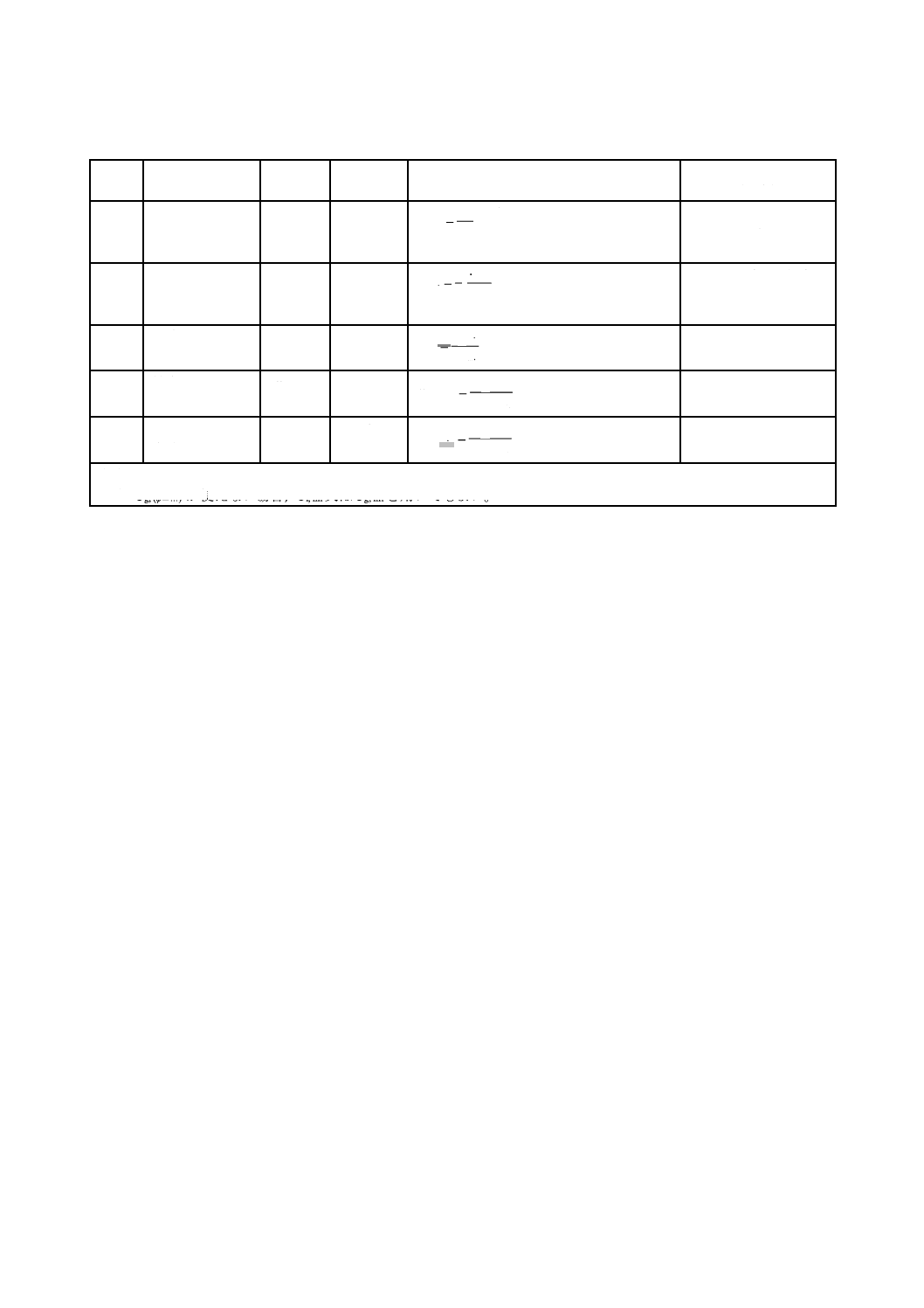
図記号説明
1
供給ポンプ
2
圧力制御弁(手動式)
3
フィルタ
4
温度計
5
圧力計
6
絞り弁
7
供試モータ
a
調整可能な荷重
8 背圧用ポンプ
9 背圧用リリーフ弁
10 熱交換器(加熱及び冷却)
11 インデックス軸継手
12 静圧軸受に支持したはり(梁)
13 トルク変換器
14 電気式トルク負荷
図1−代表的試験回路(片回転方向モータの一定トルク法)
5.2
測定
機器はJIS B 9939-1及びJIS B 9939-2の要求事項に適合しなければならない。測定機器の系統誤差は,
選択した測定精度の等級と一致しなければならない(附属書B参照)。
4
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
一定トルク法
6.1
試験装置
6.1.1
試験装置は,5.1.1の試験回路を利用し,図1に示す機器並びに6.1.2及び6.1.3に規定した機器で
構成しなければならない。
6.1.2
トルク負荷装置については,起動時に供試モータの回転を制限するような一端に調整可能な荷重を
かけたはり(梁)又は連続的に回転を制限するような電気的に可変制御可能な装置を使用しなければなら
ない。
6.1.3
トルク負荷装置が,モータ軸を逆回転させないような構造にしなければならない。
6.2
試験条件
6.2.1
供試モータは,試験を始める前に,熱平衡状態にしなければならない。
6.2.2
出口圧力は,モータ製造業者の推奨範囲で一定に維持しなければならない。
6.2.3
1秒当たりの入口圧力の増加率は,試験圧力の20 %より小さいか等しくし,起動圧力に著しく影響
を与えてはならない。
6.2.4
測定を始める前のモータ差圧は,最高試験圧力の5 %以下又は1 MPa以下のどちらか小さい方にし
なければならない。ただし,この要求は,ウインチドライブのような特殊な応用製品のためのモータには
適用できない。
6.2.5
異なる軸位置での測定数は,最高起動圧力が信頼度95 %を得られるように決めなければならない。
6.2.6
トルクは,±1 %の範囲に保たなければならない。
6.3
試験手順
6.3.1
モータ出口の背圧を一定値に調整する(6.2.2参照)。
6.3.2
モータが回転し始めるまで,入口圧力を徐々に増やしていく(6.2.3参照)。同時に,入口圧力に対
するモータ軸の角変位を記録する。
6.3.3
6.3.2で得られた記録からグラフを作成し,モータが回転し始める圧力に注意する。その点は,3.2
で規定した急激な変化をする所である。
6.3.4
幾つかの異なる軸位置で,6.3.2及び6.3.3に規定した手順を繰り返す(6.2.5参照)。
6.3.5
起動条件の範囲が得られるように,幾つかの異なるトルク(6.2.6参照)で6.3.2〜6.3.4に規定した
手順を繰り返す。
6.3.6
両方向モータの場合は,逆回転も6.3.2〜6.3.5に規定した手順を繰り返す。
6.4
結果の表示
注記 量記号及び添字の詳細な説明は,箇条4による。
次の式を使って,それぞれの試験トルクに対する最小起動効率を計算する。
max
,e
mi
,i
min
,
hm
Δ
Δ
p
p
=
η
又は
max
,e
mi
,g
min
,
hm
Δ
Δ
p
p
=
η
ここに,
'
2
Δ
i
mi
,i
T
V
p
×
=π
'
2
Δ
g
mi
,g
T
V
p
×
=π
5
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
T': 試験トルク
Δpe, max: ある試験トルクにおいて測定された最も高い差圧
7
一定圧力法
7.1
試験装置
7.1.1
試験装置は,5.1.1の試験回路を利用し,図1に示す機器及び7.1.2に規定した機器で構成しなけれ
ばならない。
7.1.2
6.1.2の要求に対応する適切な負荷装置(図1の11,12又は13,14)を用いなければならない。
7.2
試験条件
7.2.1
供試モータは,試験を始める前に熱平衡状態にしなければならない。
7.2.2
出口圧力は,モータ製造業者の推奨範囲で一定に維持しなければならない。
7.2.3
1秒当たりの試験トルクの減少率は,試験トルクの20 %以下とし,起動トルクに著しく影響を与え
てはならない。
7.2.4
測定を始める前のモータ差圧は,最高試験圧力の5 %以下又は1 MPa以下のどちらか小さい方にし
なければならない。ただし,この要求は,ウインチドライブのような特殊な応用製品のためのモータには
適用できない。
7.2.5
異なる軸位置での測定数は,最小起動トルクが信頼度95 %を得られるように決めなければならな
い。
7.3
試験手順
7.3.1
モータ出口の背圧を一定値に調整する(7.2.2参照)。
7.3.2
試験圧力に応じて,トルク負荷装置の試験トルクをモータの最大理論トルクを少し超える程度の値
に調整する。
7.3.3
要求する試験圧力に達するまで,モータへの入口圧力を徐々に増やしていく。
注記 試験圧力が高くなった場合には,その圧力を減少させ,7.3.3に規定した手順を繰り返す。
7.3.4
モータが回転し始めるまで,負荷トルクを滑らかに減らしていく(7.2.3参照)。同時に,トルクに
対するモータ軸の角変位を記録する。
7.3.5
7.3.4で得られた記録からグラフを作成し,モータが回転し始める起動トルクに注目する。その点
は,3.3に規定した急激な変化をする所である。
7.3.6
起動条件の範囲が得られるように,幾つかの異なる圧力及び軸位置(7.2.5参照)で7.3.2〜7.3.5に
規定した手順を繰り返す。
7.3.7
両方向モータの場合は,逆回転も7.3.2〜7.3.6に規定した手順を繰り返す。
7.4
結果の表示
注記 量記号及び添字の詳細な説明は,箇条4による。
次の式を使って,それぞれの試験圧力に対する最小起動トルク効率を計算する。
mi
,i
min
,e
min
,
hm
T
T
=
η
又は
mi
,g
min
e,
min
,
hm
T
T
=
η
6
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
'
2
1
i
mi
,i
p
V
T
×
×
=π
'
2
1
g
mi
,g
p
V
T
×
×
=π
p': 試験圧力
Te, min: ある試験圧力において測定された最も低いトルク
8
試験報告書
8.1
一般
試験圧力条件を使って得られた関連するすべての試験データ及び8.3に記載の情報は,試験報告書に記
録しなければならない。
注記 試験データの表示及び8.3に示す情報以外に,試験年月日,試験者などの情報を記録しておく
のが望ましい。
8.2
試験データの表示
試験測定値及び測定値を基に計算された結果は,すべて表及び適切なグラフにして示さなければならな
い。
8.3
試験データ
次の試験データは,試験報告書に含めなければならない。
a) モータの形式及び種類
b) 試験方法:一定トルク法又は一定圧力法
c) 使用した測定精度の等級(附属書B参照)
d) 油圧試験回路及び機器の形式
e) 試験流体の種類
f)
流体の動粘度(JIS K 2001参照)
g) 流体の温度(5.1.2参照)
h) 出口圧力(6.2.2又は7.2.2参照)
i)
幾何学的押しのけ容積Vg又は推定押しのけ容積Vi
j)
試験方法に応じて,
1) 試験圧力並びにそれぞれの圧力での最小起動トルク及び最大起動トルク
又は
2) 試験トルク並びにそれぞれのトルクでの最低起動圧力及び最高起動圧力
k) 最小起動効率又は最小起動トルク効率ηhm, min(6.4又は7.4参照)
l)
軸端から見たときの起動回転方向(時計回り又は反時計回り)
7
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
量記号
序文
この附属書は,量記号について規定する。
A.1 表A.1及び表A.2は,JIS B 8385に規定する文字記号に油圧モータの起動条件に関する記号を追加す
るもので,試験報告書の作成に用いる。
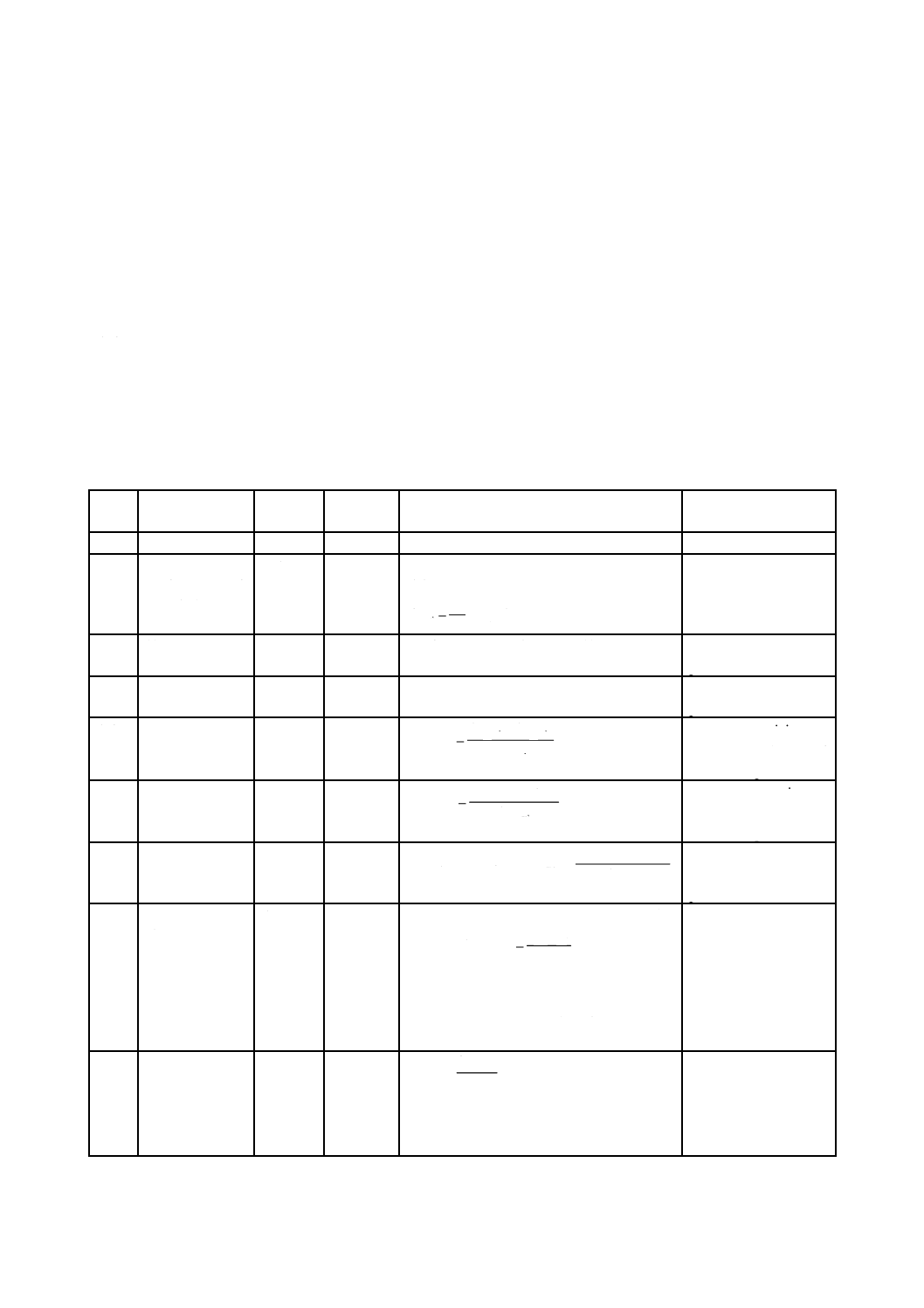
A.2 一定トルクによる起動試験に用いる文字記号は,表A.1による。
表A.1−一定トルクによる起動試験に用いる文字記号
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
A.1.1 差圧
Δp (φ=…)
ML−1T−2 軸のある位置 (φ=…) a) での差圧。
Differential pressure
A.1.2 1回転又は2π
ラジアンでの積
分平均差圧
Δpmi
ML−1T−2 1回転での積分によって得られる差圧の平
均値。
∫
=
=
=
=
π
ϕ
ϕ
ϕ
ϕ
π
2
0
)
(
mi
Δ
2
1
Δ
d
p
p
Κ
Integrated differential
pressure over
1 revolution or 2π rad
A.1.3 最小差圧
Δpe, min
ML−1T−2 1回転又は2πラジアンでの最低差圧。
Minimum differential
pressure
A.1.4 最大差圧
Δpe, max
ML−1T−2 1回転又は2πラジアンでの最高差圧。
Maximum differential
pressure
A.1.5 積分平均差圧に
対する最小差圧
の偏差
δΔpe, min
1
mi
,e
min
,e
mi
,e
min
,e
Δ
Δ
Δ
Δ
p
p
p
p
−
=
δ
Deviation of minimum
pressure from integrated
differential pressure
A.1.6 積分平均差圧に
対する最大差圧
の偏差
δΔpe, max
1
mi
,e
mi
,e
max
,e
max
,e
Δ
Δ
Δ
Δ
p
p
p
p
−
=
δ
Deviation of maximum
pressure from integrated
differential pressure
A.1.7 積分平均差圧に
対する全体の偏
差
δΔpe, t
1
mi
,e
min
,e
max
,e
max
,e
min
,e
t,e
Δ
Δ
Δ
Δ
Δ
Δ
p
p
p
p
p
p
−
=
+
=
δ
δ
δ
Overall deviation from
integrated differential
pressure
A.1.8 瞬間の幾何学的
差圧
Δpg, (φ=…)
ML−1T−2 軸のある位置での幾何学的差圧 (φ=…) a)
)
(,g
)
(,g
)
(,g
Δ
Κ
Κ
Κ
=
=
=
=
ϕ
ϕ
ϕ
V
T
p
ここに,Tg, (φ=…):瞬間の幾何学的トルク
(A.2.11参照)。
Vg, (φ=…):軸のある位置 (φ=…) での幾何学
的押しのけ容積。
Instantaneous geometric
differential pressure
A.1.9 1回転での理論
的積分平均差圧
Δpi, mi
ML−1T−2
i
mi
,i
mi
,i
2
Δ
V
T
p
π
=
ここに,Ti, mi:1回転での理論的積分平均ト
ルク(A.2.13参照)。
Vi:推定押しのけ容積(A.2.10参照)。
Integrated theoretical
differential pressure
over 1 revolution
8
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
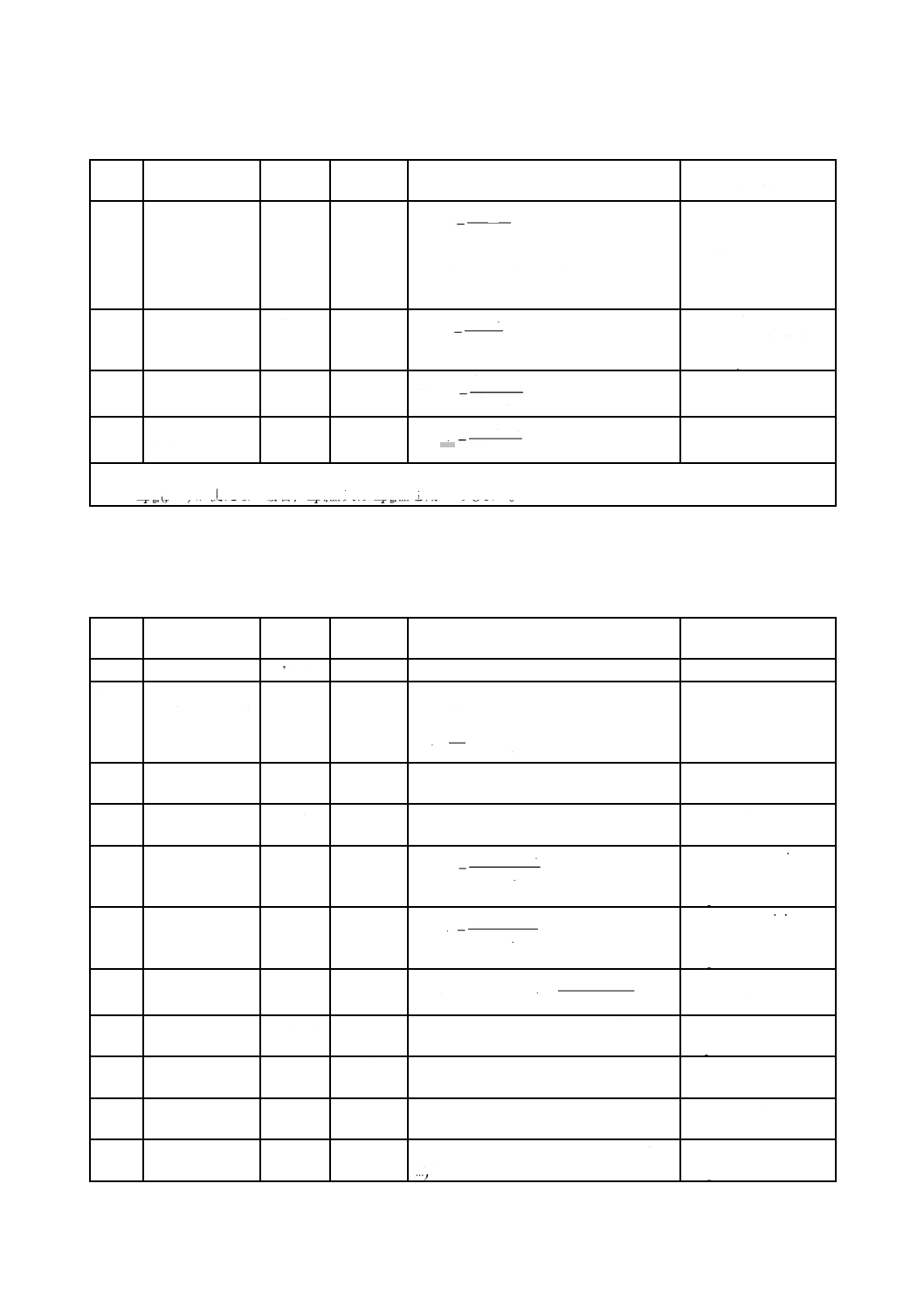
表A.1−一定トルクによる起動試験に用いる文字記号(続き)
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
A.1.10 1回転での幾何
学的積分平均差
圧
Δpg, mi
ML−1T−2
g
mi
,g
mi
,g
2
Δ
V
T
p
π
=
ここに,Tg, mi:は1回転での幾何学的積
分平均トルク(A.2.12参照)。
Vg:幾何学的押しのけ容積(A.2.9参照)。
Integrated geometrical
differential pressure
over 1 revolution
A.1.11 積分平均油圧機
械効率
ηhm, mi
1
mi
,e
mi
,g
mi
,
hm
Δ
Δ
p
p
=
η
Integrated mean
hydraulic mechanical
efficiency
A.1.12 最大油圧機械効
率b)
ηhm, max
1
min
,e
)
(,g
max
,
hm
Δ
Δ
p
p
Κ
=
=
ϕ
η
Maximum hydraulic
mechanical efficiency
A.1.13 最小油圧機械効
率b)
ηhm, min
1
max
,e
)
(,g
min
,
hm
Δ
Δ
p
p
Κ
=
=
ϕ
η
Minimum hydraulic
mechanical efficiency
注a) φは回転角度。
b) Δpg, (φ=…) が使えない場合,Δpi, mi又はΔpg, miを用いてもよい。
A.3 一定圧力による起動試験に用いる文字記号は,表A.2による。
表A.2−一定圧力による起動試験に用いる文字記号
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
A.2.1
トルク
T (φ=…)
ML2T−2
軸のある位置でのトルク (φ=…) a)
Torque
A.2.2
1回転又は2π
ラジアンでの積
分平均トルク
Tmi
ML2T−2
1回転での積分によって得られるトルク
の平均値。
∫
=
=
=
=
π
ϕ
ϕ
ϕ
ϕ
π
2
0
)
(
mi
2
1
d
T
T
Κ
Integrated torque over
1 revolution or 2πrad
A.2.3
最大トルク
Te, max
ML2T−2
1回転又は2πラジアンで測定される最高
トルク。
Maximum torque
A.2.4
最小トルク
Te, min
ML2T−2
1回転又は2πラジアンで測定される最低
トルク。
Minimum torque
A.2.5
積分平均トルク
に対する最大ト
ルクの偏差
δTe, max
1
mi
,e
mi
,e
max
,e
max
,e
T
T
T
T
−
=
δ
Deviation of maximum
torque from integrated
torque
A.2.6
積分平均トルク
に対する最小ト
ルクの偏差
δTe, min
1
mi
,e
min
,e
mi
,e
min
,e
T
T
T
T
−
=
δ
Deviation of minimum
torque from integrated
torque
A.2.7
全体の偏差
δTe, t
1
mi
,e
min
,e
max
,e
min
,e
max
,e
t,e
T
T
T
T
T
T
−
=
+
=
δ
δ
δ
Overall deviation from
integrated torque
A.2.8
瞬間幾何学的押
しのけ容積
vg, (φ=…)
L3
軸のある位置での幾何学的に計算された
押しのけ容積。
Instantaneous geometric
displacement
A.2.9
幾何学的押しの
け容積
Vg
L3
公差,すき間,変形に関係なく幾何学的
に計算された押しのけ容積。
Geometric swept
volume
A.2.10 推定押しのけ容
積
Vi
L3
流量測定から得られた押しのけ容積。
Derived swept volume
A.2.11 瞬間の幾何学的
トルク
Tg, (φ=…)
ML2T−2
軸のある位置での幾何学的トルク (φ=
…) a)
Instantaneous geometric
torque
9
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.2−一定圧力による起動試験に用いる文字記号(続き)
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
A.2.12 1回転での幾何
学的積分平均ト
ルク
Tg, mi
ML2T−2
∫
=
=
=
=
π
ϕ
ϕ
ϕ
ϕ
π
2
0
)
(
,
g
mi
,
g
2
1
d
T
T
Κ
Integrated geometric
torque over 1 revolution
A.2.13 1回転での理論
的積分平均トル
ク
Ti, mi
ML2T−2
π
2
Δ
i
mi
,i
p
V
T
=
ここに,Δp:差圧(A.1.1参照)。
Integrated theoretical
torque over 1 revolution
A.2.14 平均油圧機械効
率
ηhm
1
mi
,g
mi
,e
hm
T
T
=
η
Average hydraulic
mechanical efficiency
A.2.15 最大油圧機械効
率b)
ηhm, max
1
)
(,g
max
,e
max
,
hm
Κ
=
=
ϕ
η
T
T
Maximum hydraulic
mechanical efficiency
A.2.16 最小油圧機械効
率b)
ηhm, min
1
)
(,g
min
,e
min
,
hm
Κ
=
=
ϕ
η
T
T
Minimum hydraulic
mechanical efficiency
注a) φは回転角度。
b) Tg, (φ=…) が使えない場合,Ti, mi又はTg, miを用いてもよい。
10
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
測定精度の等級
序文
この附属書は,測定精度の等級について規定する。
B.1
測定精度の等級
試験は,要求精度に応じて受渡当事者間の協定のもとA,B及びCの測定精度等級のうちの一つで実施
する。
注記1 等級A及び等級Bは,性能をより正確に定義する必要のある特別の場合を意図している。
注記2 等級A及び等級Bは,より正確な器具及び方法を必要とするので,試験のコストが上昇する
おそれがある。
B.2
系統誤差
試験に用いる装置又は手法は,校正又は国際標準器との比較において,その系統誤差が表B.1に規定し
た限度を超えないことが証明されているものでなければならない。
注記 表B.1に規定した限度は,測定対象の量にかかわるものであり,測定器の最大指示値の百分比
ではない。
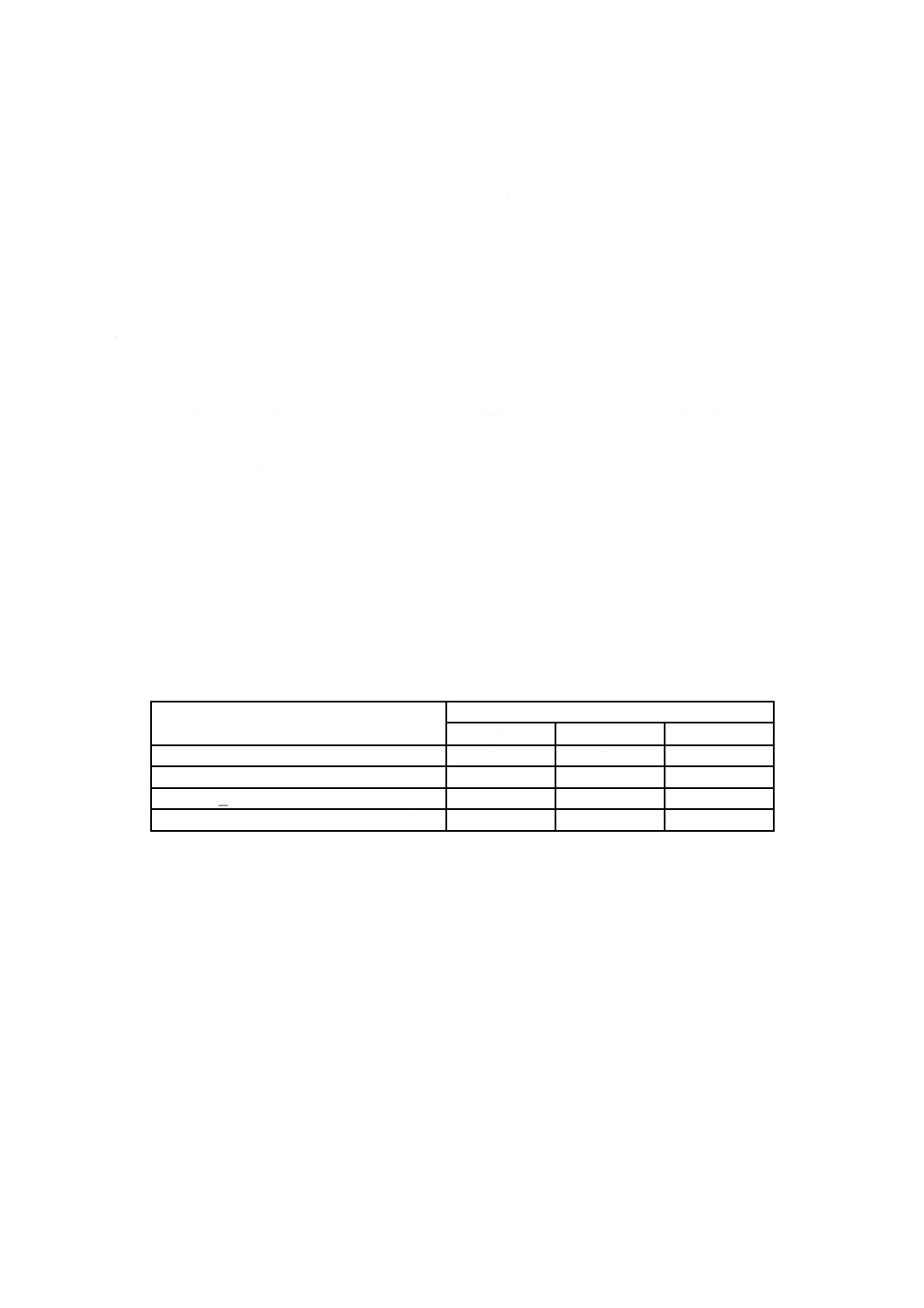
表B.1−校正中に決定される測定器の許容系統誤差
測定項目
各測定精度等級及び許容系統誤差
A
B
C
トルク
%
±0.5
±1
±2
ゲージ圧
MPa
0.2
<
であるときの圧力 MPa
±0.001
±0.003
±0.005
ゲージ圧
MPa
0.2
≧
であるときの圧力 %
±0.5
±1.5
±2.5
流体温度
℃
±0.5
±1
±2
11
B 8397-2:2008 (ISO 4392-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
実用単位の使用方法
序文
この附属書は,実用単位の使用方法について規定する。
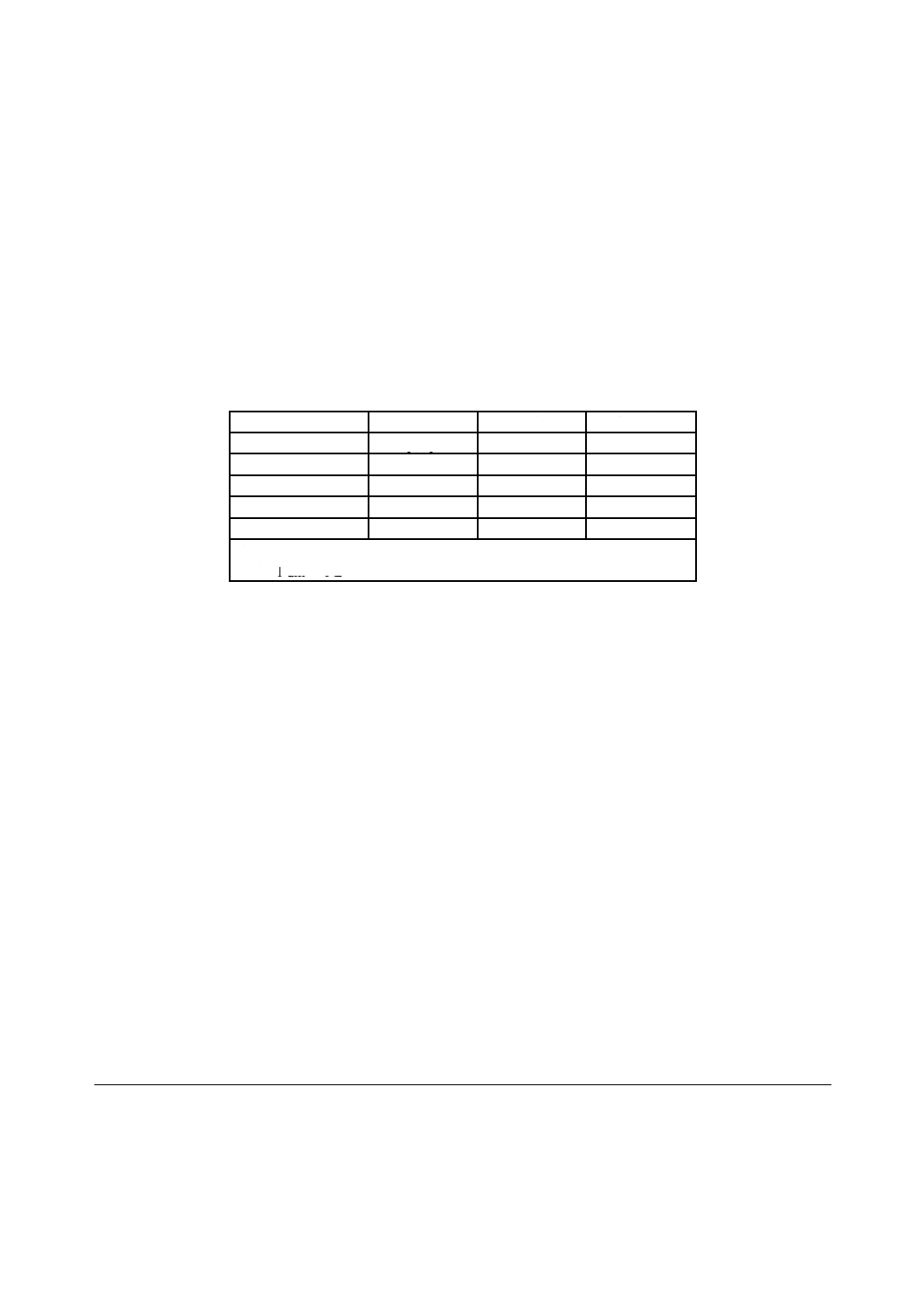
表又は図においては,試験結果は表C.1に示す単位を用いて表示することができる。
表C.1−実用単位
用語
記号
SI単位
実用単位
圧力,差圧
p, Δp
Pa
MPa a)
トルク
T
N・m
N・m
瞬間押しのけ容積
v
m3
dm3 b)
時間
t
s
s又はms
押しのけ容積
V
m3
dm3 b)
注a) 1 MPa=106 Pa=106 N/m2
b) 1 dm3=1 L
参考文献
JIS K 2001 工業用潤滑油−ISO粘度分類
注記 対応国際規格:ISO 3448 : 1992,Industrial liquid lubricants−ISO viscosity classification (MOD)