B 8009-5:2017
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 記号,用語及び定義 ·········································································································· 2
4 関連する規則及び追加要件 ································································································ 15
5 周波数特性 ····················································································································· 15
6 過周波数特性 ·················································································································· 15
7 電圧特性························································································································ 16
8 持続短絡電流 ·················································································································· 16
9 発電装置の性能に影響を及ぼす要因 ···················································································· 16
9.1 一般 ··························································································································· 16
9.2 出力に影響を及ぼす要因 ································································································ 16
9.3 過渡時周波数及び電圧に影響を及ぼす要因 ········································································· 16
9.4 段階的負荷投入 ············································································································ 16
10 回転不整率 ··················································································································· 18
11 始動特性 ······················································································································ 18
12 停止特性 ······················································································································ 19
13 並列運転 ······················································································································ 20
13.1 有効電力負荷分担 ········································································································ 20
13.2 無効電力負荷分担 ········································································································ 21
13.3 並列運転動作に対する影響 ···························································································· 23
14 定格銘板 ······················································································································ 23
15 発電装置の性能に影響を与えるその他の要因 ······································································ 25
15.1 始動方式 ···················································································································· 25
15.2 非常停止方式 ·············································································································· 25
15.3 燃料及び潤滑油の供給 ·································································································· 25
15.4 吸気装置 ···················································································································· 25
15.5 排気装置 ···················································································································· 26
15.6 冷却及び室内換気 ········································································································ 26
15.7 監視 ·························································································································· 26
15.8 騒音 ·························································································································· 26
15.9 軸継手 ······················································································································· 26
15.10 振動 ························································································································ 27
15.11 基礎 ························································································································ 27
16 性能分類に対する作動限度値 ··························································································· 27
B 8009-5:2017 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
16.1 一般 ·························································································································· 27
16.2 ガス機関の運転制限値についての推奨事項 ······································································· 28
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 32
B 8009-5:2017
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,日本内燃機関連合
会(JICEF)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正すべ
きとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS B 8009-5:2001は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS B 8009の規格群には,次に示す部編成がある。
JIS B 8009-1 第1部:用途,定格及び性能
JIS B 8009-2 第2部:機関
JIS B 8009-5 第5部:発電装置
JIS B 8009-6 第6部:試験方法
JIS B 8009-7 第7部:仕様書及び設計のための技術情報
JIS B 8009-9 第9部:機械振動の測定及び評価
JIS B 8009-10 第10部:空気音の測定方法
JIS B 8009-12 第12部:非常用発電装置
なお,対応国際規格ISO 8528は,更に次の部によって構成される。
−Part 3: Alternating current generators for generating sets
−Part 4: Controlgear and switchgear
−Part 8: Requirements and tests for low-power generating sets
−Part 13: Safety
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8009-5:2017
往復動内燃機関駆動発電装置−第5部:発電装置
Reciprocating internal combustion engine driven alternating current
generating sets-Part 5: Generating sets
序文
この規格は,2013年に第3版として発行されたISO 8528-5:2013を基とし,技術的内容を変更して作成
した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,往復動内燃機関と交流発電機とが一つの装置として作動する場合の,その組合せに起因す
る用語の定義及び設計上の基準について規定する。
この規格は,陸上用途及び海上用途の往復動内燃機関によって駆動する交流発電装置に適用する。ただ
し,航空機で使用する発電装置,陸上走行車両及び機関車の推進走行のために使用する発電装置には適用
しない。
幾つかの特殊な用途(例えば,極めて重要な病院用の電源,高層ビル用の電源など)では,追加要件が
必要な場合がある。この規格では,その一般事項についても規定する。
その他の往復動形の原動機(例えば,蒸気機関など)によって駆動する発電装置でも,この規格の規定
は,その一般事項として適用できる。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 8528-5:2013,Reciprocating internal combustion engine driven alternating current generating sets
−Part 5: Generating sets(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 8002-5 往復動内燃機関−性能−第5部:ねじり振動
注記 対応国際規格:ISO 3046-5,Reciprocating internal combustion engines−Performance−Part 5:
Torsional vibrations(MOD)
JIS C 4034-1 回転電気機械−第1部:定格及び特性
2
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 対応国際規格:IEC 60034-1,Rotating electrical machines−Part 1: Rating and performance(MOD)
ISO 8528-1:2005,Reciprocating internal combustion engine driven alternating current generating sets−Part 1:
Application, ratings and performance
ISO 8528-3:2005,Reciprocating internal combustion engine driven alternating current generating sets−Part 3:
Alternating current generators for generating sets
3
記号,用語及び定義
この規格で用いる主な記号,用語及び定義は,表1による。
注記 電気装置の技術データの表示を行うため,IECでは用語“定格”(rated)及び添え字“N”が用
いられている。機械装置の技術データの表示では,ISOでは用語“呼び”(declared)及び添え
字“r”が用いられている。
したがって,この規格では,“定格”の用語は電気関連の事項だけに適用する。それ以外では
“呼び”の用語をこの規格を通して用いる。
3
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義
番号
記号
用語
単位
定義
3.1
f
周波数
Hz
−
3.2
fd,max
最大瞬時周波数上昇(オーバシュート周波
数)[maximum transient frequency rise
(overshoot frequency)]
Hz
高出力から低出力への瞬時変化時に発生
する最大周波数(図4参照)。
注記 記号は,JIS B 8002-4に規定するも
のと異なる。
3.3
fd,min
最大瞬時周波数降下(アンダシュート周波
数)[maximum transient frequency drop
(undershoot frequency)]
Hz
低出力から高出力への瞬時変化時に発生
する最小周波数(図4参照)。
注記 記号は,JIS B 8002-4に規定するも
のと異なる。
3.4
fdo a)
過周波数制限装置の作動周波数(operating
frequency of overfrequency limiting device)
Hz
過周波数制限装置が実際に作動する周波
数。
3.5
fds
過周波数制限装置の設定周波数(setting
frequency of overfrequency limiting device)
Hz
発電装置の設定制限周波数。
この周波数を超えた場合,過周波数制
限装置が作動を開始する。
注記 実際には,設定周波数の値の代わ
りに,許容過周波数の値を指定す
る(JIS B 8009-2の6.5.2参照)。
3.6
fi
無負荷周波数(no-load frequency)
Hz
−
3.7
fi,r
定格無負荷周波数(rated no-load frequency)
Hz
−
3.8
fmax b)
最大許容周波数(maximum permissible
frequency)
Hz
発電装置製造業者が指定する,周波数限
度内の安全な領域にある,装置に許容さ
れる最大の使用周波数(JIS B 8009-2の
6.5.1参照)。
3.9
fr
定格周波数[declared frequency (rated
frequency)]
Hz
−
3.10
fi,max
最大無負荷周波数(maximum no-load
frequency)
Hz
−
3.11
fi,min
最小無負荷周波数(minimum no-load
frequency)
Hz
−
3.12
farb
運転周波数(frequency at actual power)
Hz
(図3参照)
3.13
∧
∨
f
周波数の変動幅(width of frequency
oscillation)
Hz
−
注a) 任意の発電装置では,作動周波数は,発電装置の全慣性及び過周波数保護装置の設計によって異なる。
b) 周波数限度(JIS B 8009-2の図3参照)とは,発電装置の機関及び発電機が,損傷の危険なく,運転を持続で
きる計算上の周波数である。
4
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義(続き)
番号
記号
用語
単位
定義
3.14
Ik
持続短絡電流(sustained short-circuit current)
A
−
3.15
t
時間
s
−
3.16
ta
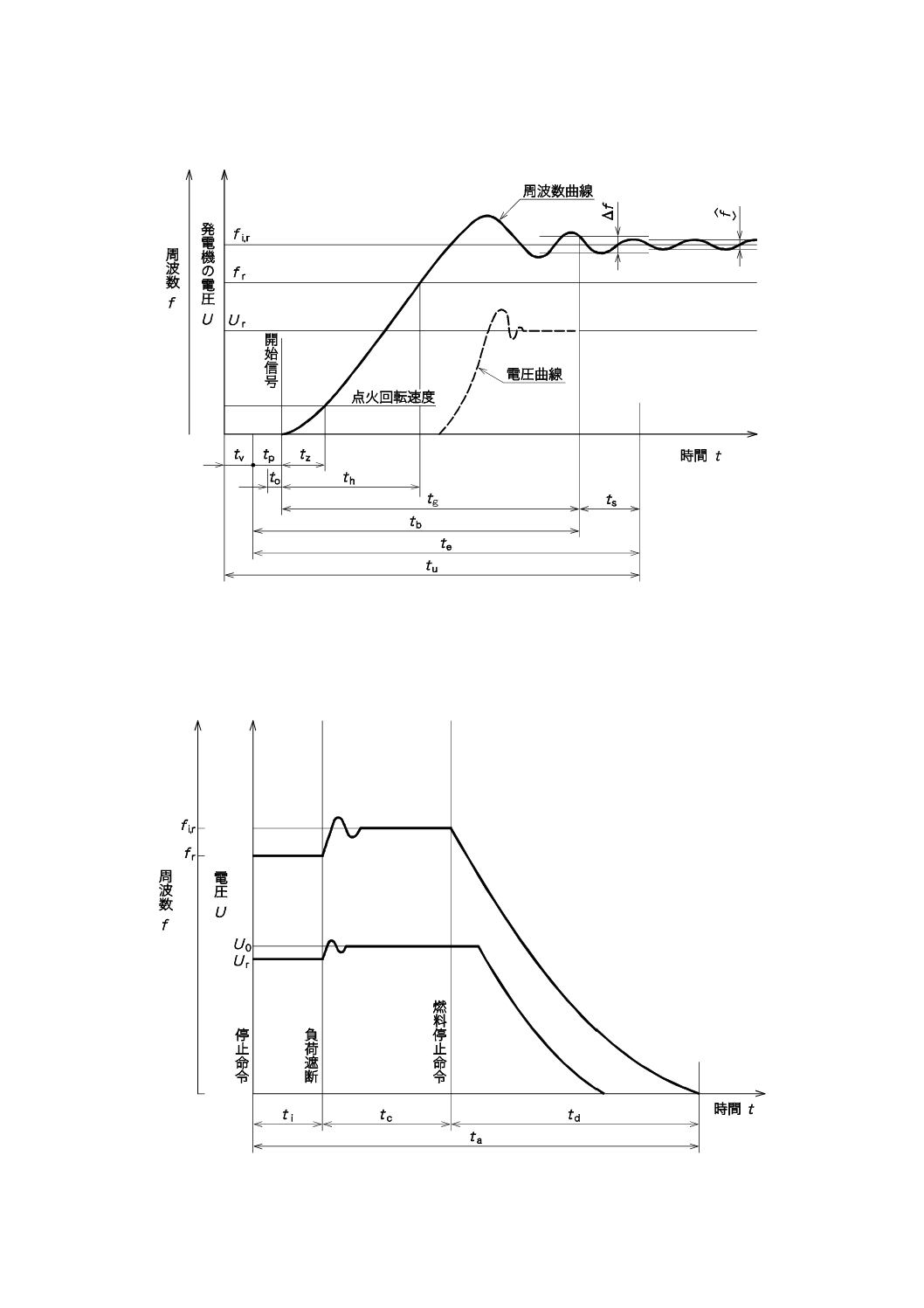
総停止時間(total stopping time)
s
停止指令が出されてから,発電装置が完
全に停止するまでの時間(図9参照)。
ta=ti+tc+td
3.17
tb
負荷準備時間(load pick-up readiness time)
s
始動指令から規定の出力を供給する準備
が整うまでの時間(図8参照)。
この場合,一定の周波数及び電圧の許
容値を考慮に入れる。
tb=tp+tg
3.18
tc
負荷遮断後冷却運転時間(off-load run-on
time)
s
負荷が遮断されてから,発電装置の停止
信号が発電装置に出されるまでの時間
(図9参照)。
この時間は,また,“冷却運転時間”と
も呼ばれる。
3.19
td
発電装置燃料停止時間(run-down time)
s
発電装置の燃料停止信号が出されてか
ら,発電装置が完全に停止するまでの時
間(図9参照)。
3.20
te
負荷投入時間(load pick-up time)
s
始動指令から規定の負荷が接続されるま
での時間(図8参照)。
te=tp+tg+ts
3.21
tf,de
負荷減少後の周波数整定時間(frequency
recovery time after load decrease)
s
指定された負荷の急減少後の定常周波数
帯域からの振れから,周波数が指定の定
常周波数許容帯域に整定するまでの時間
(図4参照)。
3.22
tf,in
負荷増大後の周波数整定時間(frequency
recovery time after load increase)
s
指定された負荷の急増大後の定常周波数
帯域からの振れから,周波数が指定の定
常周波数許容帯域に整定するまでの時間
(図4参照)。
3.23
tg
総回転立上がり時間(total run-up time)
s
機関が回転を開始してから,規定の出力
を供給する準備が整うまでの時間(図8
参照)。
注記 この場合,一定の周波数及び電圧
の許容値を考慮に入れる。
3.24
th
回転立上がり時間(run-up time)
s
機関が回転を開始してから,定格回転速
度に初めて到達するまでの時間(図8参
照)。
3.25
ti
負荷遮断時遅れ時間(on-load run-on time)
s
負荷が遮断されてから,発電装置の停止
信号が発電装置に出されるまでの時間
(図9参照)。
注記 この時間は,“冷却運転時間”とも
いう。
3.26
tp
始動準備時間(start preparation time)
s
始動指令から自力運転が開始されるまで
の時間(図8参照)。
3.27
ts
負荷切替時間(load switching time)
s
規定の負荷を投入する準備が整った時間
から,その負荷が投入されるまでの時間
(図8参照)。
5
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義(続き)
番号
記号
用語
単位
定義
3.28
tu
遮断器投入時間(interruption time)
s
始動を開始する基準に達してから規定の
負荷が投入されるまでの時間(図8参
照)。
tu=tv+tp+tg+ts
=tv+te
注記1 この時間は,自動始動式発電装
置では,特に考慮する必要があ
る(箇条11参照)。
注記2 JIS B 8009-12の電圧整定時間は
遮断器投入時間の一つの例であ
る。
3.29
tU,de
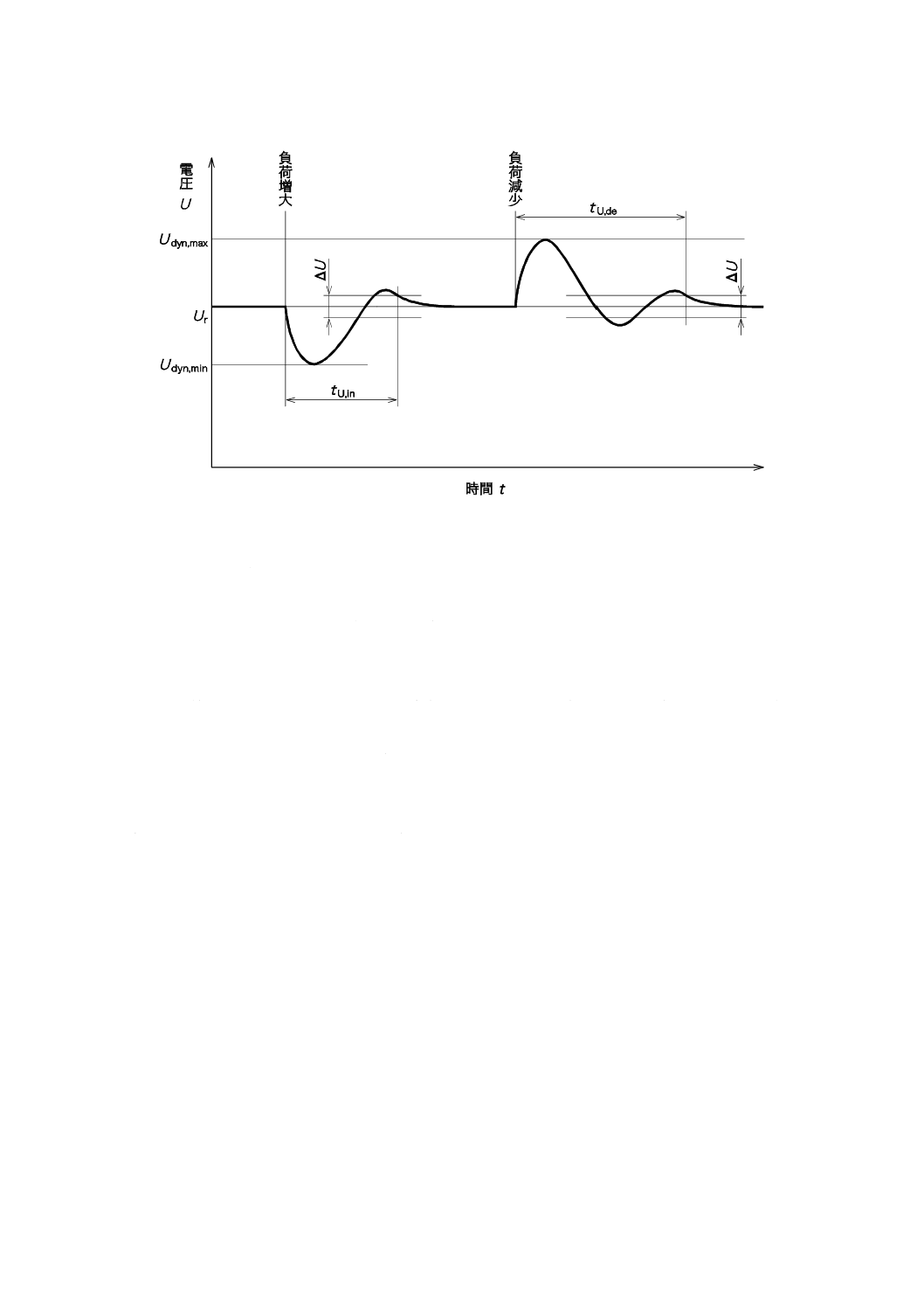
負荷減少後の電圧整定時間(voltage recovery
time after load decrease)
s
負荷が減少し始めた時点から,電圧が指
定の定常電圧許容帯域に復帰して,その
状態を継続するまでの時間(図5参照)。
3.30
tU,in
負荷増大後の電圧整定時間(voltage recovery
time after load increase)
s
負荷が増大し始めた時点から,電圧が指
定の定常電圧許容帯域に復帰して,その
状態を継続するまでの時間(図5参照)。
3.31
tv
始動遅れ時間(start delay time)
s
始動を開始する基準に達してから始動指
令を出すまでの時間(特に,自動始動式
の発電装置,図8参照)。
注記 この時間は,適用される発電装置
によって変わることはない。この
時間の正確な値は,注文者の責任
で決定する,又は必要に応じて,
公的機関の特殊要件によって決定
する。この時間は,例えば,主電
源装置がごく短時間故障した場合
の始動を防止するために規定す
る。
3.32
tz
自力運転到達時間(cranking time)
s
機関が回転を開始してから,点火回転速
度(始動回転速度)に到達するまでの時
間(図8参照)。
3.33
to
始動前潤滑油供給時間(pre-lubricating time)
s
特定の機関で,自力運転が開始される前
に油圧を上げるために必要な時間(図8
参照)。
この時間は,小形の発電装置では通常
ゼロであり,これらの装置では予潤滑を
通常必要としない。
3.34
νf
単位時間当たりの周波数設定範囲変化率
(rate of change of frequency setting)
−
遠隔制御での周波数設定範囲変化率。
次のように,周波数設定範囲と定格周
波数との比率を時間当たりの変化率で表
す。
(
)
100
r
min
,i
max
,i
f
×
−
=
t
f
f
f
ν
(%·s−1)
6
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義(続き)
番号
記号
用語
単位
定義
3.35
νU
単位時間当たりの電圧設定範囲変化率(rate
of change of voltage setting)
−
遠隔操作での電圧設定の変化率。
次のように,電圧設定範囲と定格電圧
との比率を単位時間当たりの変化率で表
す。
(
)
100
r
do
s,
up
s,
U
×
−
=
t
U
U
U
ν
(%·s−1)
3.36
Us,do
下限調整電圧(downward adjustable voltage)
−
−
3.37
Us,up
上限調整電圧(upward adjustable voltage)
−
−
3.38
Ur
定格電圧(rated voltage)
V
定格周波数及び定格出力での,発電機端
子の線間電圧。
注記 定格電圧は,作動及び性能特性に
対して,製造業者が指定する。
3.39
Urec
整定電圧(recovery voltage)
V
指定の負荷条件での,最大達成可能な定
常電圧。
注記 整定電圧は,通常,定格電圧に対
する比率で表す。この電圧は,通
常,定常電圧許容帯域[ΔU(図5
参照)]の範囲内である。負荷が定
格負荷を超える負荷の場合,整定
電圧は飽和及び励磁機/調整器の
磁界の能力によって制限される。
3.40
Us
設定電圧(set voltage)
V
調整によって選択する,規定の運転を行
うための線間電圧。
3.41
Ust,max
最大定常電圧(maximum steady-state voltage)
V
発電機の温度上昇を考慮した,定格周波
数及び規定の力率での無負荷から定格出
力までの全ての整定運転時における最大
の電圧。
3.42
Ust,min
最小定常電圧(minimum steady-state voltage)
V
発電機の温度上昇を考慮した,定格周波
数及び規定の力率での無負荷から定格出
力までの全ての整定運転時における最小
の電圧。
3.43
U0
無負荷電圧(no-load voltage)
V
定格周波数及び無負荷時の,発電機の端
子の線間電圧。
3.44
Udyn,max
負荷減少時の最大上方過渡電圧(maximum
upward transient voltage on load decrease)
V
高い負荷から低い負荷への急な変化時に
発生する最大電圧(図5参照)。
3.45
Udyn,min
負荷増大時の最小下方過渡電圧(minimum
downward transient voltage on load increase)
V
低い負荷から高い負荷への急な変化時に
発生する最小電圧(図5参照)。
3.46
s,
max
ˆU
設定電圧の最大ピーク値(maximum peak
value of set voltage)
V
−
3.47
s,
min
ˆU
設定電圧の最小ピーク値(minimum peak
value of set voltage)
V
−
3.48
s
mean,
ˆU
設定電圧の最大及び最小ピーク値の平均値
(average value of the maximum and minimum
peak value of set voltage)
V
−
7
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義(続き)
番号
記号
用語
単位
定義
3.49
s,
mod
ˆU
電圧変調率(voltage modulation)
%
準周期電圧変動量と定格周波数及び定常
回転速度でのピーク電圧の平均値との比
率。
(
)
100
2
ˆ
ˆ
ˆ
ˆ
ˆ
min
,s
mod,
max
,s
mod,
min
,s
mod,
max
,s
mod,
s
mod,
×
+
−
=
U
U
U
U
U
(%)
注記1 電圧変調率は,調整器,回転不
整率又は断続的負荷によって発
生する周期的若しくは不規則な
外乱である。
注記2 準周期電圧変動(quasi-periodic
voltage variation)
基本発電周波数よりも低い周
波数をもつピーク電圧の周期的
な振動(図11参照)。
注記3 ライトの点滅は,電圧変調の特
殊な場合である(図11及び図12
参照)。
3.50
max
,s
mod,
ˆU
電圧変調の最大ピーク(maximum peak of
voltage modulation)
V
整定電圧における準周期電圧変動(ピー
ク間の)時の最大電圧
3.51
min
,s
mod,
ˆU
電圧変調の最小ピーク(minimum peak of
voltage modulation)
V
整定電圧における準周期電圧変動(ピー
ク間の)時の最小電圧
3.52
∧
∨U
電圧の振幅(width of voltage oscillation)
Hz
−
3.53
Δfneg
近似直線からの下方周波数偏(downward
frequency deviation from linear curve)
Hz
(図5参照)
3.54
Δfpos
近似直線からの上方周波数偏差(upward
frequency deviation from linear curve)
Hz
(図5参照)
3.55
Δf
定常周波数許容帯域(steady-state frequency
tolerance band)
Hz
負荷の増大後又は減少後,周波数が規定
の時間内に到達する定常周波数に対す
る,受渡当事者間で協定された,周波数
帯域(図4参照)。
3.56
Δfc
近似直線からの周波数偏差(maximum
frequency deviation from a linear curve)
Hz
無負荷と呼び負荷との間のΔfneg又はΔfpos
の最大偏差(図2参照)。
3.57
Δfs
周波数設定範囲(range of frequency setting)
Hz
無負荷最高調整周波数と無負荷最低調整
周波数との間の範囲を表す周波数の差分
(図1参照)。
Δfs=fi,max−fi,min
3.58
Δfs,do
下限周波数設定範囲(downward range of
frequency setting)
Hz
呼び無負荷周波数と無負荷最低調整周波
数との間の範囲を表す周波数の差分(図
1参照)。
Δfs,do=fi,r−fi,min
3.59
Δfs,up
上限周波数設定範囲(upward range of
frequency setting)
Hz
無負荷時最高調整周波数と呼び無負荷周
波数との間の範囲を表す周波数の差分
(図1参照)。
Δfs,up=fi,max−fi,r
8
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義(続き)
番号
記号
用語
単位
定義
3.60
ΔU
定常電圧許容帯域(steady-state voltage
tolerance band)
V
負荷の急な増大後又は減少後の規定の調
整時間内に,電圧が到達する定常電圧に
ついての協定した電圧帯域(図5参照)。
別途指定がない場合は,次の式による。
100
2
r
st
U
U
U
×
=
∆
δ
3.61
ΔUs
電圧設定範囲(range of voltage setting)
V
無負荷から呼び出力までの全ての負荷及
び協定の力率の範囲内で,定格周波数時
に,発電機端子の調整可能な電圧の最大
上限及び最大下限間の範囲。
ΔUs=ΔUs,up+ΔUs,do
3.62
ΔUs,do
下限電圧設定範囲(downward range of voltage
setting)
V
無負荷から呼び出力までの全ての負荷及
び協定した力率の範囲内で,定格周波数
時の発電機端子の定格電圧と下限調整電
圧との範囲。
ΔUs,do=Ur−Us,do
3.63
ΔUs,up
上限電圧設定範囲(upward range of voltage
setting)
V
無負荷から呼び出力までの全ての負荷及
び協定の力率の範囲内で,定格周波数時
の発電機端子の定格電圧と上限調整電圧
との範囲。
ΔUs,up=Us,up−Ur
3.64
Δδfst
周波数/出力特性偏差(frequency/power
characteristic deviation)
%
無負荷と呼び出力との間の出力範囲で,
周波数/出力の近似直線と実際の出力で
の最大偏差Δfc(3.56)と定格周波数との
比率(図2参照)。
100
r
st
×
∆
=
∆
f
f
fδ
(%)
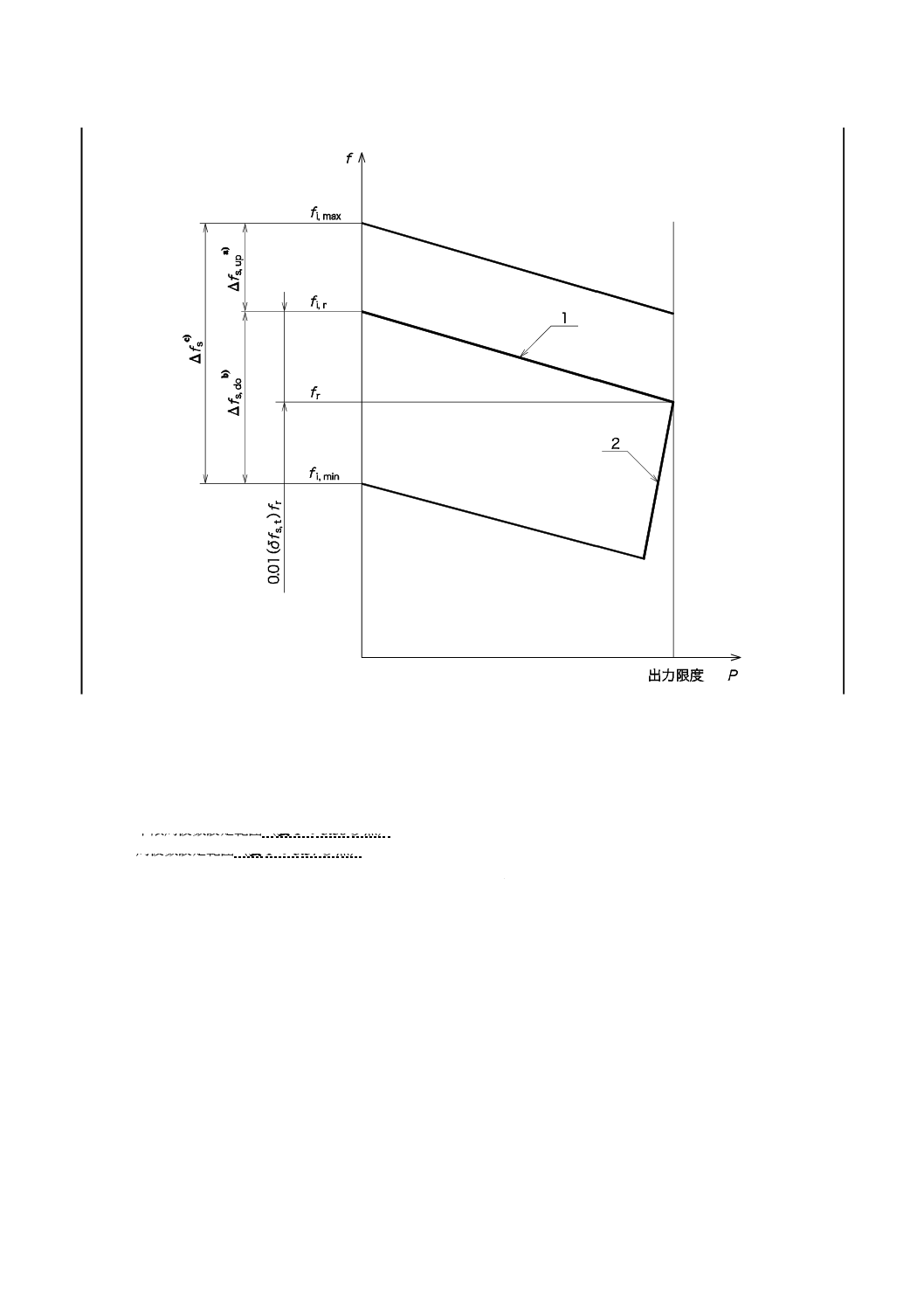
3.65
−
周波数/出力特性曲線(frequency/power
characteristic curve)
−
発電装置の無負荷から呼び出力までの間
で有効出力に対する整定周波数をプロッ
トした曲線(図2参照)。
3.66
αU
定常電圧許容帯域変化率(related steady-state
voltage tolerance band)
%
定常電圧許容帯域と定格電圧との比率。
100
r
U
×
∆
=UU
α
(%)
3.67
αf
周波数許容帯域変化率(related frequency
tolerance band)
%
定常周波数許容帯域と定格周波数との比
率。
100
r
f
×
∆
=ff
α
(%)
3.68
βf
定常周波数変化率(steady-state frequency
band)
%
一定出力における平均周波数に対して,
包絡線から求めた周波数の変動幅∧∨fと,
定格周波数frとの比率。
100
r
f
×
=
∧
∨
f
f
β
(%)
3.69
δfd
瞬時の周波数変動率(初期周波数からの)
(transient frequency difference/from initial
frequency)
%
注記 3.70及び3.71参照。
9
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義(続き)
番号
記号
用語
単位
定義
3.70
δf −d
負荷増大時の瞬時の周波数変動率(初期周波
数からの)[transient frequency deviation
(from initial frequency) on load increase (−)]
%
急な負荷の変化に続く調速過程のアンダ
シュート周波数と初期周波数との間の一
時的な周波数差分と定格周波数との比
率。
100
r
arb
min
,d
d
×
−
=
−
f
f
f
fδ
(%)
注記 マイナス(−)記号は,負荷増大
後の周波数のアンダシュートを表
す。
3.71
δf +d
負荷減少時(+)の瞬時の周波数変動率(初
期周波数からの)[transient frequency
deviation (from initial frequency) on load
decrease (+)]
%
急な負荷の変化に続く調速過程のオーバ
シュート周波数と初期周波数との間の一
時的な周波数差分と定格周波数との比
率。
100
r
arb
max
,d
d
×
−
=
+
f
f
f
fδ
(%)
注記 プラス(+)記号は,負荷減少後
の周波数のオーバシュートを表
す。
3.72
δfdyn
定格周波数からの瞬時周波数偏差(transient
frequency deviation from rated frequency)
%
注記 3.73及び3.74参照。
3.73
δf −dyn
負荷増大時(−)瞬時周波数偏差(定格周波
数からの)[transient frequency deviation
(from rated frequency) on load increase (−)]
%
急な負荷の変化に続く調速過程のアンダ
シュート周波数と定格周波数との一時的
な周波数差分と定格周波数との比率。
100
r
r
min
,d
dyn
×
−
=
−
f
f
f
fδ
(%)
注記 マイナス(−)記号は,負荷増大
後の周波数のアンダシュートを表
す。
3.74
δf +dyn
負荷減少時(+)の瞬時周波数偏差(定格周
波数からの)[transient frequency deviation
(from rated frequency) on load decrease (+)]
%
急な負荷の変化に続く調速過程のオーバ
シュート周波数と定格周波数との一時的
な周波数差分と定格周波数との比率。
100
r
r
max
,d
dyn
×
−
=
+
f
f
f
fδ
(%)
注記 プラス(+)記号は負荷減少後の
オーバシュートを示す。
3.75
δUdyn
瞬時電圧偏差(transient voltage deviation)
%
注記 3.76及び3.77参照。
3.76
δU −dyn
負荷増大時(−)の瞬時電圧偏差[transient
voltage deviation on load increase (−)]
%
発電機が,定格周波数及び通常の励磁制
御下の定格電圧で駆動され,定格負荷に
切り替わる際の電圧降下と定格電圧との
比率。
100
r
r
min
,
din
dyn
×
−
=
−
U
U
U
U
δ
(%)
注記 マイナス(−)記号は,負荷増大
後のアンダシュートを表す。
10
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義(続き)
番号
記号
用語
単位
定義
3.77
δU +dyn
負荷減少時(+)の瞬時電圧偏差[transient
voltage deviation on load decrease (+)]
%
負荷減少時の過渡電圧偏差とは,発電機
が,定格周波数及び通常の励磁制御下の
定格電圧で駆動され,定格負荷が急に遮
断される際の電圧上昇と定格電圧との比
率。
100
r
r
max
,
din
dyn
×
−
=
+
U
U
U
U
δ
(%)
注記 プラス(+)記号は,負荷減少後
のオーバシュートを表す。
3.78
δfs
周波数設定範囲変化率(related range of
frequency setting)
%
周波数の設定範囲と定格周波数との比率
100
r
min
,i
max
,i
s
×
−
=
f
f
f
fδ
(%)
3.79
δfs,do
下限周波数設定範囲変化率(related
downward range of frequency setting)
%
下限周波数設定範囲(3.58)と定格周波
数との比率。
100
r
min
,i
r,i
do
s,
×
−
=
f
f
f
fδ
(%)
3.80
δfs,up
上限周波数設定範囲変化率(related upward
range of frequency setting)
%
上限周波数設定範囲(3.59)と定格周波
数との比率。
100
r
r,i
max
,i
up
s,
×
−
=
f
f
f
fδ
(%)
3.81
δfst
周波数ドループ(frequency droop)
%
呼び出力における定格周波数(fr)と無負
荷定格周波数の差とfrとの比率。
100
r
r
r,i
st
×
−
=
f
f
f
fδ
(%)
注記 一般に,複数の発電機が並列運転
する場合に,負荷変動に対しての
系統の周波数を制御するために,
各負荷の運転周波数に勾配を設定
して,許容周波数範囲での運転を
保持する。
3.82
δQCC
横軸電流補償ドループ勾配(grade of
quadrature-current compensation droop)
−
−
3.83
δs
回転不整率(cyclic irregularity)
−
注記 箇条10参照。
3.84
δflim
過周波数設定率(overfrequency setting ratio)
%
過周波数制限装置の設定周波数と定格周
波数との差分と定格周波数との比率。
100
r
r
ds
lim
×
−
=
f
f
f
fδ
(%)
3.85
δUst
定常電圧偏差(steady-state voltage deviation)
%
無負荷から定格出力までの全ての出力に
おける定格周波数及び指定力率での,定
常状態における設定電圧からの最大偏差
と,定格電圧との比率。
100
2
r
min
,
st
max
,
st
st
×
−
±
=
U
U
U
U
δ
(%)
注記 定常電圧偏差については,温度上
昇の影響を考慮する必要がある。
3.86
δUs
電圧設定範囲変化率(related range of voltage
setting)
%
電圧設定範囲と定格電圧との比率。
100
r
do
s,
up
s,
s
×
∆
+
∆
=
U
U
U
U
δ
(%)
11
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−記号,用語及び定義(続き)
番号
記号
用語
単位
定義
3.87
δUs,do
下限電圧設定範囲変化率(related downward
range of voltage setting)
%
下限電圧設定範囲と定格電圧との比率。
100
r
do
s,
r
do
s,
×
−
=
U
U
U
U
δ
(%)
3.88
δUs,up
上限電圧設定範囲変化率(related upward
range of voltage setting)
%
上限電圧設定範囲と定格電圧との比率。
100
r
r
up
s,
up
s,
×
−
=
U
U
U
U
δ
(%)
3.89
δU2,0
電圧不平衡率(voltage unbalance)
%
無負荷時の逆相又は零相電圧成分の正相
電圧成分に対する定格電圧との比率。
3.90
P
出力(power)
kW
発電装置の出力。
3.91
Pr
呼び出力(declared power)
kW
発電装置の100 %出力。
3.92
Parb
運転出力(actual power)
kW
発電装置の運転出力。
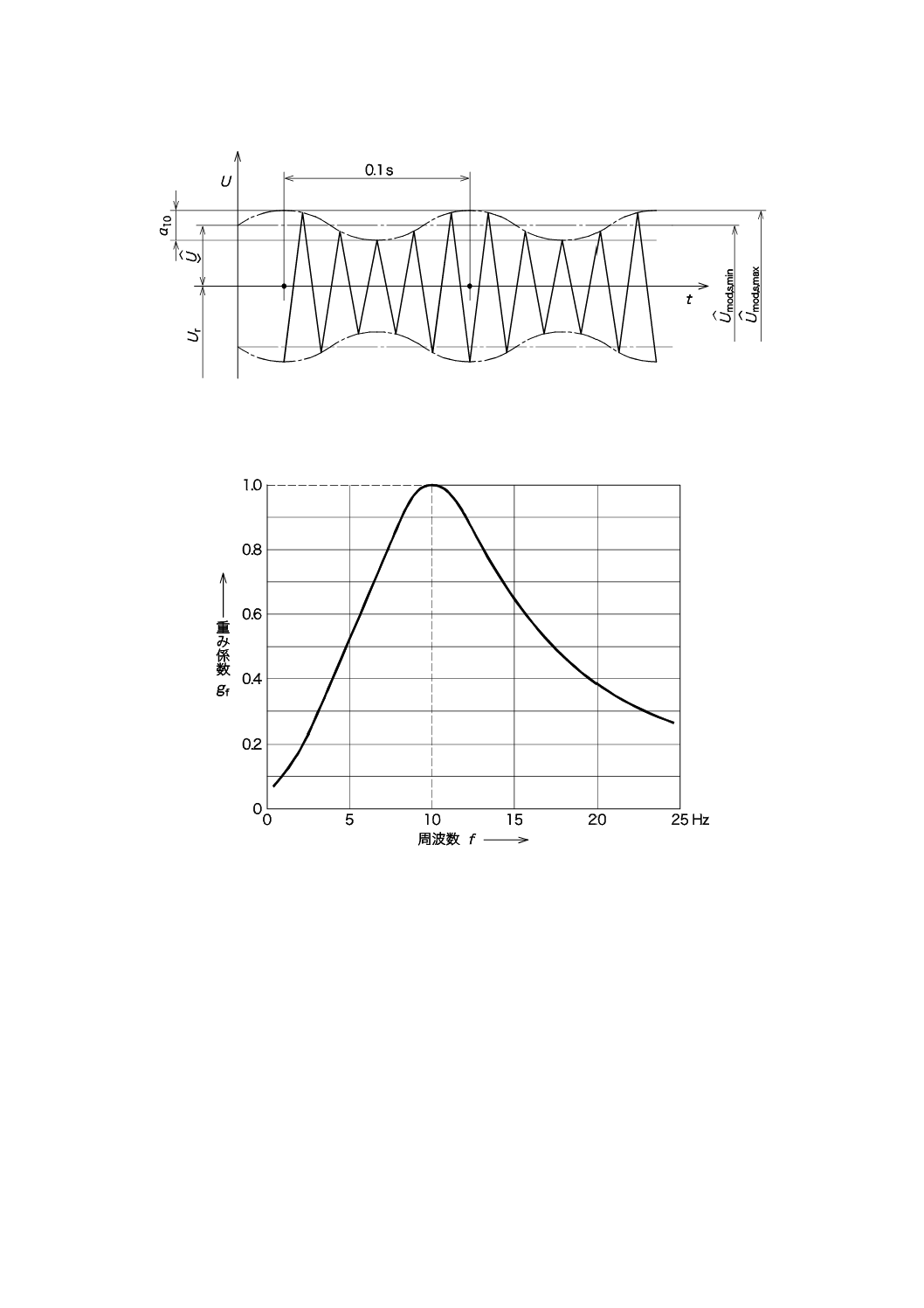
3.93
gf
重み係数(weighting factor)
−
10 Hzの準周期電圧変動(3.49)の振幅と
f Hzの準周期電圧変動振幅との比率[図
11,図12及び表4の注n) 参照]。
12
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
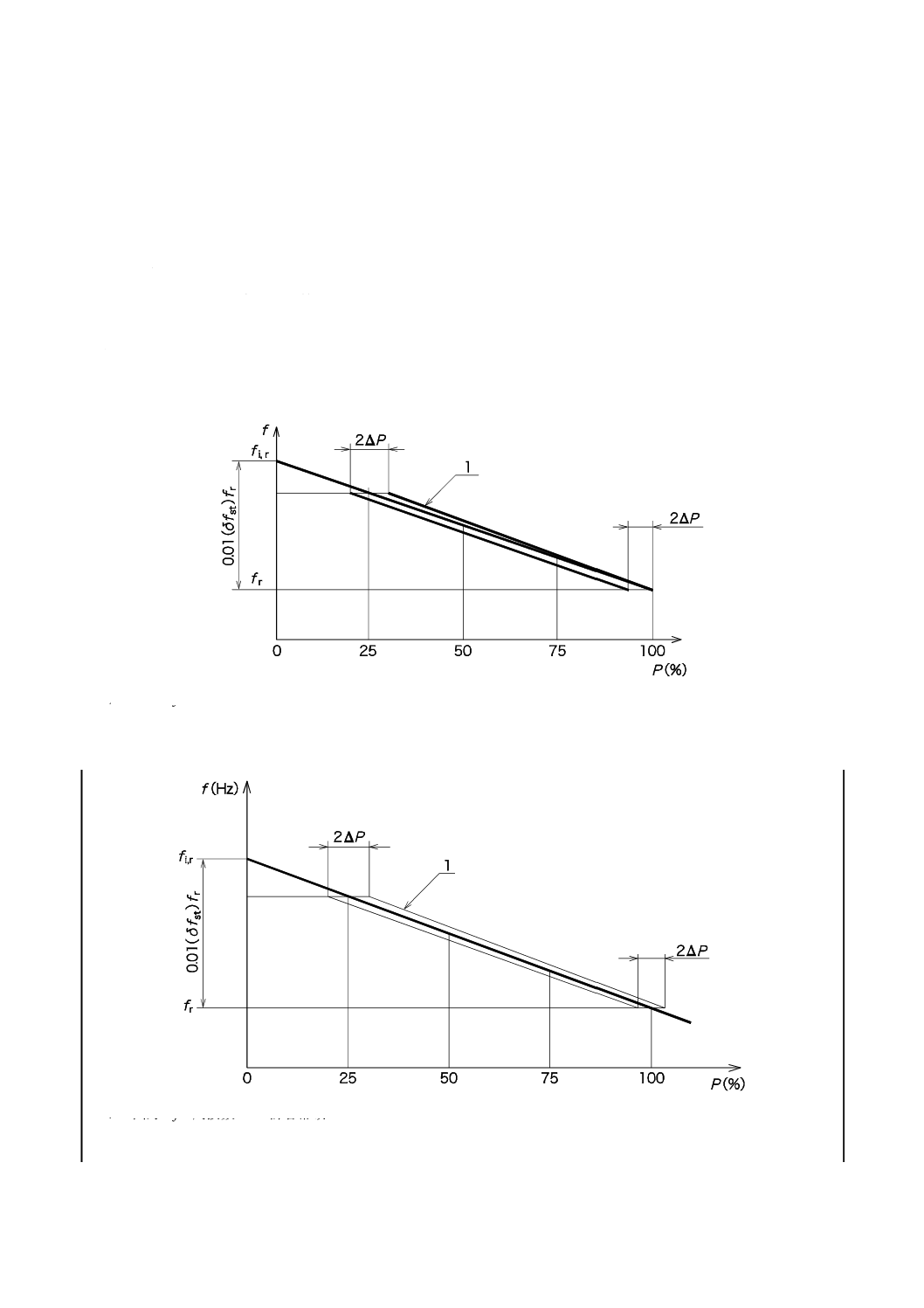
P 出力(発電装置の出力)
f 周波数
1 周波数/出力特性線図
2 出力限度[発電装置の出力限度は,発電機の効率を考慮の上,機関の出力限度(例えば,燃料制限出力)によって
決める。]
注a) 上限周波数設定範囲(表1の3.59参照)
b) 下限周波数設定範囲(表1の3.58参照)
c) 周波数設定範囲(表1の3.57参照)
図1−周波数/出力特性及び周波数設定範囲
13
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2−周波数/出力特性の近似直線からの周波数偏差
14
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
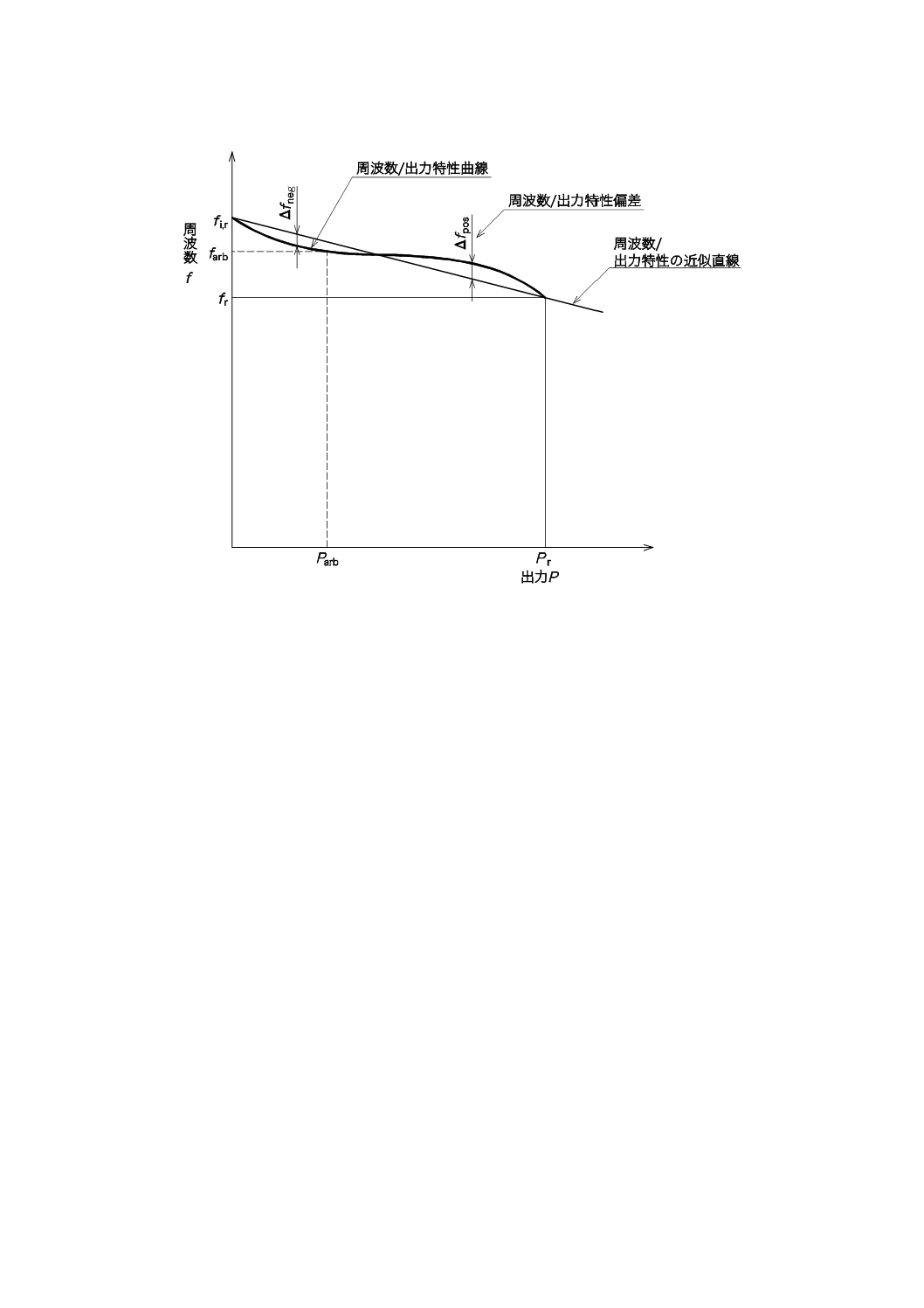
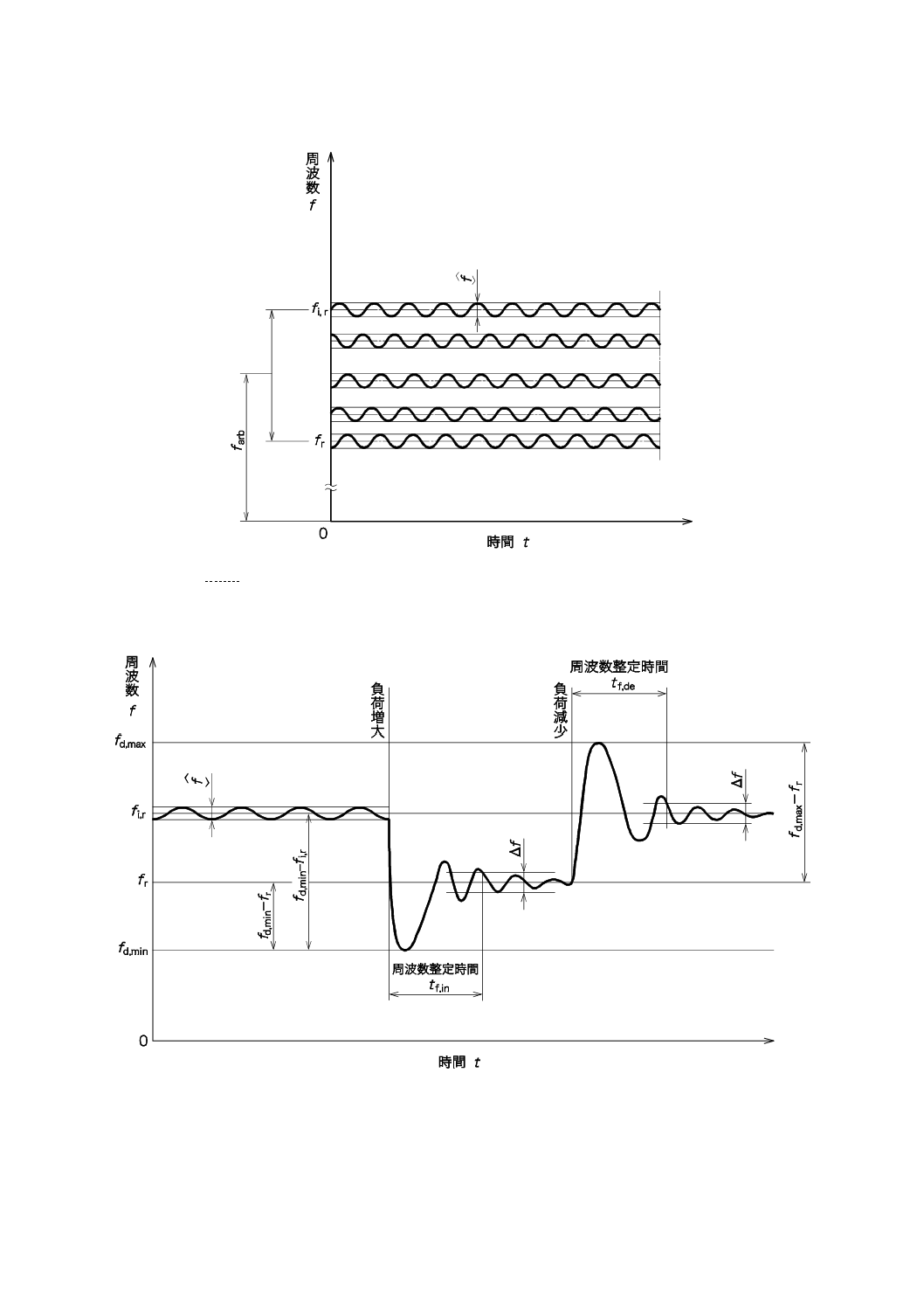
注記 この図で,farbはfi,rとfrの間にある周波数を表す。
図3−定常周波数変動率
図4−動的周波数動作
15
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5−過渡電圧特性(横軸電流補償なし)
4
関連する規則及び追加要件
船級協会の規則に適合する必要のある船上及び海上設備で使用する発電装置では,船級協会の追加要件
を適用する。注文者は,装置の注文前に,船級協会を指定する。
船級を取らない設備で使用する発電装置の追加要件は,個々の場合ごとに,受渡当事者間の協定によっ
て定める。
その他の公的機関の規則による特殊要件に適合する必要がある場合には,注文者は注文を行う前に,そ
の公的機関を指定する。
その他一切の要件は,受渡当事者間の協定によって決定する。
5
周波数特性
定常周波数特性は,主として,機関の調速機の性能によって異なる。
発電装置の注文者は,20 %の出力から呼び出力までの範囲で発生する定常周波数変化率(βf)の最大値
を指定しなければならない。20 %以下の出力では,βfは高い値を示すことがあるが(図3参照),同期が
許容できる範囲内とする。
動的周波数特性,すなわち,負荷の変化に対する応答は,全てのシステム構成部品の複合動作[例えば,
過給システムの形式を含む機関のトルク,負荷,慣性,減衰などの特性など(表1参照)]によって,し
たがって,全ての関連構成部品の個々の設計によって異なる。発電装置の動的周波数動作は,発電機の回
転速度に直接関係することがある。
周波数特性の用語,記号及び定義は,表1による。
6
過周波数特性
過周波数特性の記号,用語及び定義は,表1による。
16
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7
電圧特性(図5参照)
発電装置の電圧特性は,主として,発電機の固有の設計及び自動電圧調整器の性能による。
また,定常周波数特性及び過渡周波数特性は,発電機の電圧に影響することがある。
電圧特性に関する記号,用語及び定義は,表1による。
8
持続短絡電流
持続短絡電流Ikは,電流作動式保護装置にとって重要であるが,発電機端子の障害に対して発電機製造
業者が指定している理論値よりも,実際には低いことがある。実際値は,発電機と障害発生地点との間の
回路のインピーダンスによって影響を受ける(ISO 8528-3の10.3参照)。
9
発電装置の性能に影響を及ぼす要因
9.1
一般
発電装置の周波数性能及び電圧性能は,発電装置の出力及び構成部品の特性によって異なる。
9.2
出力に影響を及ぼす要因
その他の出力に関する要因の中でも,次の要因は特に発電装置の仕様に関係があり,発電装置及び開閉
装置の“サイズ指定”を行う際に,考慮しなければならない。
a) 用途
b) 接続する負荷の電力要件
c) 負荷の力率
d) 接続する電動機の始動特性
e) 接続する負荷の不等率
f)
断続負荷
g) 非線形負荷の影響
開閉装置だけでなく,機関及び発電機の“サイズ指定”に際しては,接続する負荷の概要(負荷プロフ
ァイル)も考慮しなければならない。
9.3
過渡時周波数及び電圧に影響を及ぼす要因
発電装置の,急な負荷変動に対する過渡周波数及び電圧特性は,次の要因の影響を受ける。
a) 機関の排気ターボ装置
b) 呼び出力での機関の正味平均有効圧力 Pme
c) 調速機の動作
d) 発電機の設計
e) 発電機の励磁装置特性
f)
電圧調整器の動作
g) 発電装置全体の慣性モーメント
負荷の変化による発電装置の周波数及び電圧特性を示すためには,接続する負荷装置によって与えられ
る投入最大負荷又は遮断最大負荷を決定することが必要である。
また,瞬時電圧偏差及び瞬時周波数偏差は,電力消費装置の電圧又は周波数許容偏差内になければなら
ない。
9.4
段階的負荷投入
動的負荷に対する応答に関連する全ての影響を定量化することは実際にはできないので,負荷投入の推
17
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
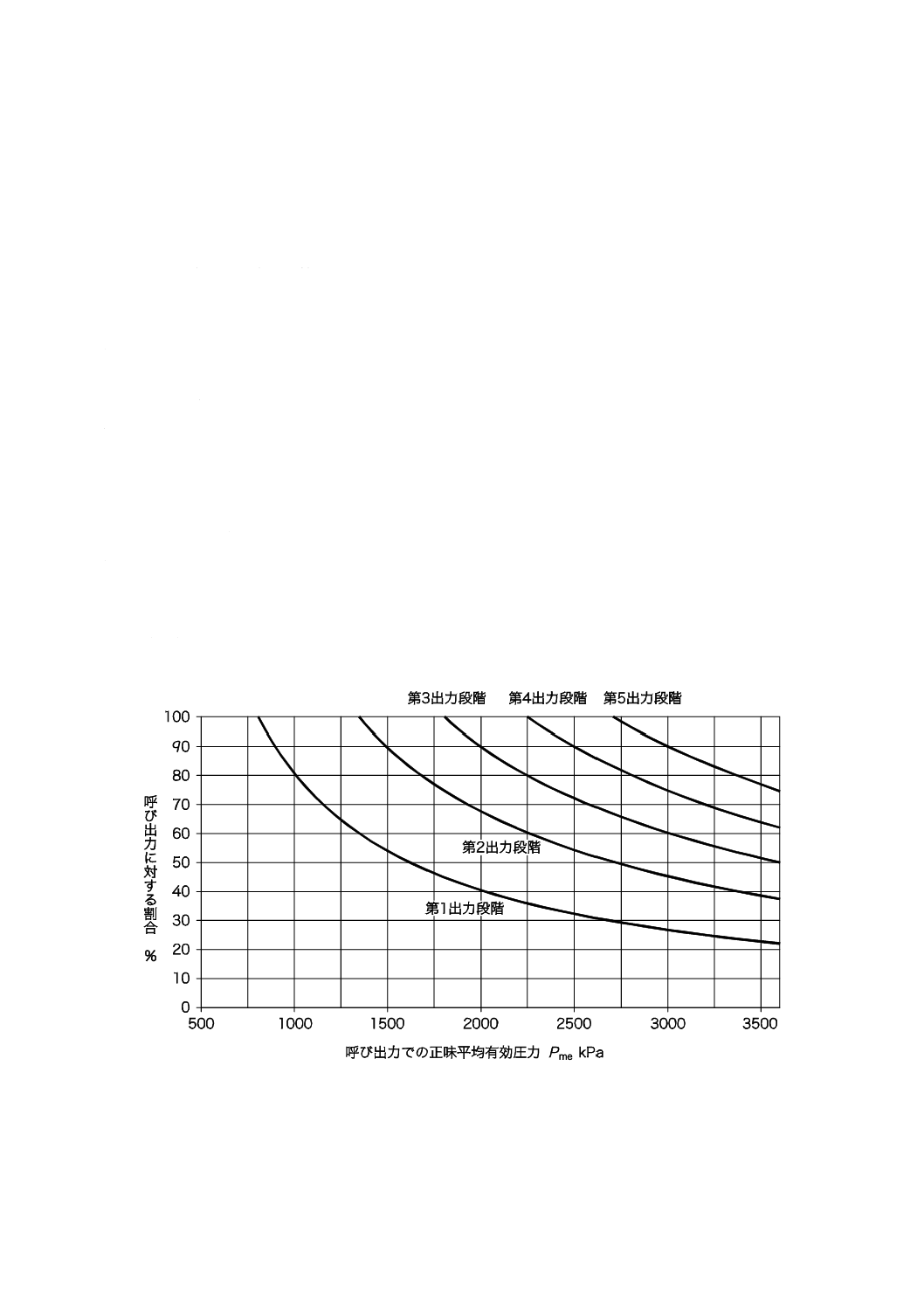
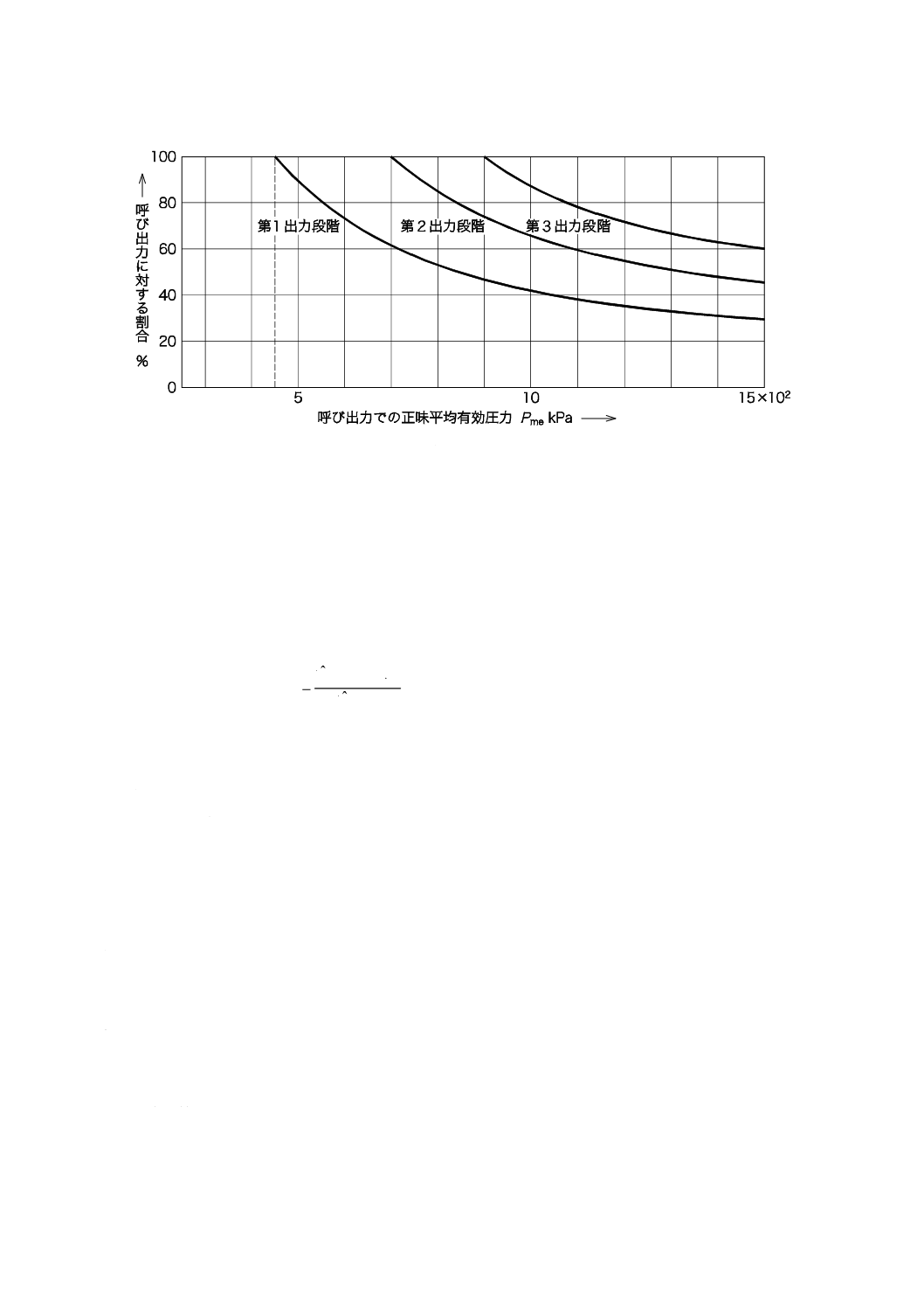
奨値を,周波数の許容降下に基づいて指定する。正味平均有効圧力Pmeが高い場合,瞬時負荷投入は幾つ
かの段階に分けて行うことが通常必要である。図6及び図7に,呼び出力での正味平均有効圧力Pmeに基
づいて,投入される瞬時負荷投入の段階のガイド値を示す。
ガス機関の燃焼状態が,ディーゼル機関とは非常に異なるので,ガス機関の負荷投入に対する応答特性
は,ディーゼル機関の応答特性とはかなり異なる。ガス機関を使用した発電装置の負荷投入の手順は,発
電装置の注文者と供給者との協定によって決定しなければならない。
段階的負荷投入の時間間隔は,次の要因による。
a) 機関の掃気量
b) 機関の正味平均有効圧力
c) 機関の過給システム
d) 機関の調速機の形式
e) 発電装置の電圧調整器
f)
発電装置全体の回転慣性
必要に応じて,負荷投入の時間間隔は,発電装置の購入者と製造業者との間で協定しなければならない。
必要な最小回転慣性を決定する基準は,次の要因による。
g) 周波数の許容降下量
h) 回転不整率
i)
場合によっては,並列運転の場合の動作
負荷投入方法の決定に際しては,使用する機関の実際の負荷受動能力を考慮する必要がある(JIS B
8002-4参照)。
図6−最大瞬間投入負荷率と呼び出力での正味平均有効圧力Pmeとの関係(4ストローク機関)
18
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図7−最大瞬間投入負荷率と呼び出力での正味平均有効圧力Pmeとの関係
(2サイクル高速機関)
10
回転不整率
回転不整率δsは,往復動内燃機関の不整によって発生する周期的回転速度の変動である。すなわち,一
定負荷の下で,発電機の軸の平均角速度に対する最大角速度と最小角速度との差分の比である。単機運転
の場合,回転不整率は,対応する発電機電圧の変調と一致するので,次のように,発生した電圧の変動を
測定して求める。
s,
mean
s
min,
s
max,
s
ˆ
ˆ
ˆ
U
U
U
−
=
δ
注記1 弾性継手を機関と発電機との間に取付け及び/又は慣性モーメントを変更して,機関の回転
不整率の測定値に対して,発電機の回転速度の回転不整率を変更することができる。
注記2 機関トルクの不整率及び発電機固有振動数の共振を防止するため,低回転速度(100 min−1
から180 min−1)の圧縮点火(ディーゼル)機関で並列運転する発電装置では,特別な考慮が
必要である(ISO 8528-3の箇条11参照)。
11
始動特性
始動特性は,幾つかの要因,例えば:
a) 気温
b) 機関の温度
c) 始動用空気圧力
d) 始動用蓄電池の状態
e) 潤滑油の粘度
f)
発電装置の全慣性
g) 燃料の質
h) 始動装置の状態
などによって異なる。これらの要因は,受渡当事者間の協定による(図8参照)。
19
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
始動特性に関する用語,記号及び定義は,表1による。
図8−始動特性
12
停止特性
停止時間特性に関する用語,記号及び定義は,表1による(図9参照)。
図9−停止特性
20
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
13
並列運転
13.1
有効電力負荷分担
13.1.1
有効電力負荷分担に影響を及ぼす要因
有効電力負荷分担は,次の一つ又は二つ以上の要因によって影響を受けることがある。並列運転時の有
効電力負荷分担の例を図10及び図10Aに示す。
a) 調速機のドループ特性
b) 機関及びその調速機の動的動作
c) 継手の動的動作
d) 発電機の動的動作,この場合,接続されている系統又は注文者の装置の特性を考慮する。
e) 自動電圧調整器の特性
P:出力 f:周波数 1:許容帯域
図10−並列運転時の有効電力負荷分担の例1(出力限度が定格出力の場合)
P:出力 f:周波数 1:許容帯域
図10A−並列運転時の有効電力負荷分担の例2(出力限度が定格出力でない場合)
21
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
13.1.2
計算方法
差分,ΔPiは,個々の発電装置によって供給される電力の割合と,理想的な周波数特性で全ての発電装
置によって供給される総出力の割合との間の比率で表示され,次の式による。
100
1
,r
1
,r
×
−
=
∆
∑
∑
=
=
n
j
j
n
j
j
i
i
i
P
P
P
P
P
(%)
ここに,
n: 並列運転している発電装置の数
i: 全ての並列運転発電装置のグループ内にあると思われる
個々の発電装置を識別する指標
Pi: 個々の発電装置の有効電力
Pr,i: 個々の発電装置の定格有効電力
ΣPj: 並列運転発電装置の有効電力の和
ΣPr, j: 並列運転発電装置の定格有効電力の和
最適な有効電力負荷分担が総定格有効電力発生時に達成される場合,特定の発電装置の有効電力負荷分
担の最大の偏りは,その定格有効電力の20 %から100 %までの範囲で,機関の調速機の設定に変更がない
とき発生する。自動有効電力負荷分担システムが採用されている場合,有効電力の偏りは,機関の調速機
特性だけで得られる値に比べて,少なくすることができる。並列運転を行う発電装置間で出力に偏りがあ
る場合に,逆電力で発電機が回されるのを防止するため,適切な注意,例えば,逆電力継電器などが必要
である。
13.1.3
有効電力負荷分担の例
表2に示す例は,cosϕ=0.8と仮定したときの有効電力負荷分担の計算例である。
表2−有効電力負荷分担の例(cosϕ=0.8)
例
発電
装置
定格出力
Pr,i
∑
=
n
j
j
P
1
,r
出力
Pi
∑
=
n
j
jP
1
i
i
i
P
P
P
,r
p,=
∑
∑
=
=
=
n
j
j
n
j
j
P
P
P
1
,r
1
p,s
ΔPi
kW
kW
kW
kW
%
%
%
1
1
400
1 200
275
900
68.8
75
−6.2
2
400
300
75
0
3
400
325
81.3
+6.3
2
1
400
900
335
675
83.8
75
+8.8
2
300
210
70
−5
3
200
130
65
−10
注記 一定のハンチングに起因する出力の偏りは,有効電力負荷分担の許容範囲に含まれる。負荷が
瞬時に変化する場合は,有効電力負荷分担の定常時の偏り及びハンチングの値を一時的に超過
することがある。
13.2
無効電力負荷分担
13.2.1
無効電力負荷分担に影響を及ぼす要因
無効電力負荷分担は,次の一つ又は二つ以上の要因によって影響を受けることがある。
a) 横軸電流補償電圧ドループ勾配(δQcc)
22
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 均圧線連結装置による安定化
c) 自動無効電力負荷分担の制御
d) 自動電圧調整器の特性
13.2.2
計算方法
差分,ΔQiは,個々の発電装置によって供給される無効電力の割合と,理想的な電圧ドループ特性での
全ての発電装置によって供給される総無効電力の割合との間の比率で表示され,次式による。
100
1
,r
1
,r
×
−
=
∆
∑
∑
=
=
n
j
j
n
j
j
i
i
i
Q
Q
Q
Q
Q
(%)
ここに,
n: 並列運転している発電装置の数
i: 全ての並列運転発電装置のグループ内にあると思われる
個々の発電装置を識別する指標
Qi: 個々の発電装置の無効電力
Qr,i: 個々の発電装置の定格無効電力
ΣQj: 並列運転発電装置の無効電力の和
ΣQr, j: 並列運転発電装置の定格無効電力の和
最適な無効電力負荷分担が総定格無効電力発生時に達成される場合,特定の発電装置の無効電力負荷分
担の最大の偏りは,その定格無効電力の20 %から100 %までの無効電力範囲での電圧制御基準値の設定に
変更がないとき発生する。正確な無効電力負荷分担は,例えば,次によって行うことができる。
a) 横軸電流補償電圧ドループの勾配
b) 均圧線連結装置
c) 自動無効電力負荷分担の制御
13.2.3
無効電力の負荷分担の例
表3に示す例は,cosϕ=0.8の場合の無効電力負荷分担の計算例である。
表3−無効電力負荷分担の例(cosϕ=0.8)
例
発電
装置
定格無
効電力
Qr,i
∑
=
n
j
j
Q
1
,r
無効電力
Qi
∑
=
n
j
j
Q
1
i
i
i
Q
Q
Q
,r
p,=
∆
∑
∑
=
=
=
∆
n
j
j
n
j
j
Q
Q
Q
1
,r
1
p,s
ΔQi
kvar
kvar
kvar
kvar
%
%
%
1
1
300
900
206
675
68.7
75
−6.3
2
300
225
75
0
3
300
244
81.3
+6.3
2
1
300
675
251
507
83.7
75
+8.7
2
225
158
70.2
−4.8
3
150
98
65.3
−9.7
注記 出力が急に変化する場合,無効電力負荷分担の定常時の偏り及びハンチングの許容値を一時的
に超過してもよい。
23
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
13.3
並列運転動作に対する影響
次の要因は,並列運転動作に影響することがある。
a) 調速機のドループ特性
b) 機関及びその調速機の動的動作
c) 継手の動的動作
d) 発電機の動的動作,この場合,接続されている主電源装置又はその他の並列運転発電機の互いの反応
が考慮される。
e) 自動電圧調整器の特性
f)
自動電圧調整器(AVR)の横軸補償電圧ドループ(δQcc)の勾配
14
定格銘板
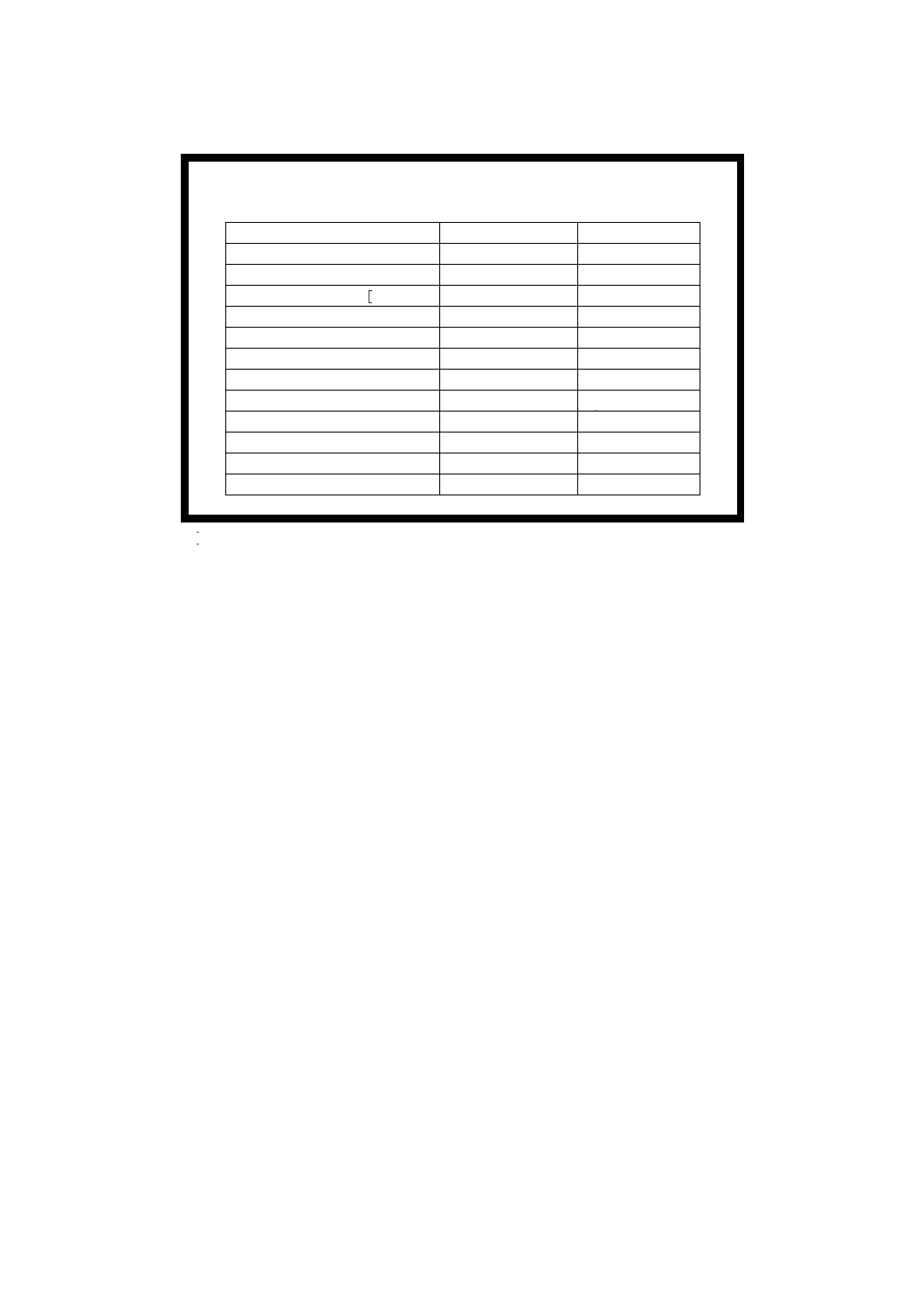
発電装置には,次に示す定格銘板を添付する(図13参照)。
a) 装置用の定格銘板
装置用の定格銘板には,少なくとも次に示す情報を示す。ただし,小出力装置で,製造番号などを
基に製造年が特定できる場合には,製造年を省略してもよい。
1) “発電装置”の文字
2) 製造業者の名称又はマーク
3) 装置の製造番号
4) 装置の製造年
5) 定格出力(kW)。これには,ISO 8528-1:2005の箇条13に規定する,出力の種別,COP,PRP,LTP
又はESPのいずれかを表示する。
ただし,出力の種別は省略してもよい。
6) ISO 8528-1:2005の箇条7に従った性能分類
ただし,この性能分類は省略してもよい。
7) 定格力率
8) 定格周波数(Hz)
9) 定格電圧(V)
10) 定格電流(A)
11) 質量(kg)
b) 機関用の定格銘板
c) JIS C 4034-1及びISO 8528-3の箇条14に従った発電機用の定格銘板
d) 開閉装置が発電装置の構成部品である場合は,開閉装置の定格銘板
注記1 図13は発電装置の定格銘板の例を示す。
注記2 10 kW未満の定格のユニットは,1枚の定格銘板に情報を併せて表示してもよい。
注記3 設置場所の海抜最大高度(m)及び最高大気温度(℃)は,取扱説明書等の技術文書に記載
する。
注記4 6) の性能分類は,JIS B 8009-1:2001の箇条7の性能分類と同等である。
24
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図11−正規周波数における10 Hzの振幅a10の電圧変調(16.18参照)
f:周波数 gf:重み係数
注記 表4の注n) 参照。
図12−輝度の変化による等価知覚を示す曲線
25
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
発 電 装 置
製造業者
−
製造番号
−
製造年
−
定格出力 [ ]
kW
定格力率
−
定格周波数
Hz
定格電圧
V
定格電流
A
質量
kg
性能分類
−
[ ]:出力の種類(ISO 8528-1:2005,箇条13)を示す略語を記入するスペース
COP:連続出力
PRP:プライム出力
LTP:制限時間出力
ESP:非常用出力
図13−発電装置の定格銘板の例
15
発電装置の性能に影響を与えるその他の要因
15.1
始動方式
発電装置の大きさ,設計及び用途に応じ,動力源によって異なった始動方式が用いられる。
a) 機械式(例えば,クランクを回して始動)
b) 電気式(例えば,電気式始動モータ)
c) 空気式(例えば,シリンダへの圧縮空気投入又は空気式始動モータ)
15.2
非常停止方式
発電装置の設計及び用途に応じ,停止信号によって異なった非常停止方式が用いられる。
a) 機械式
b) 電気式
c) 空気式
d) 油圧式
15.3
燃料及び潤滑油の供給
発電装置が全ての運転状態で良好に作動するように,燃料及び潤滑油を供給するように設計しなければ
ならない。さらに,例えば,火災及び爆発に対する安全性を考慮する。また,その国の公的機関が規定す
る燃料及び潤滑油についての規制に従わなければならない。
15.4
吸気装置
燃焼に必要な空気の性状を考慮して,フィルタの性能を決める。
26
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15.5
排気装置
排気装置は許容排気背圧(機関製造業者が決める)及び要求される騒音低減量に従って,設計する。装
置の設計には,次の事項に対する基準が重要である。
a) 固体音の遮音
b) 断熱及び被覆処置(放熱,壁の貫通及び接触防止)
c) 配管の膨張に対する寸法補償
d) 水抜き
e) 水進入の予防
f)
排気爆発の防止
g) 排気出口端部の形状(例えば,風の方向及び鳥類に対する保護)
h) 支持
i)
ガス状排出物に対する要求
15.6
冷却及び室内換気
定置式発電プラントにとって,設備の建屋を設計するときには,機関,発電機及び開閉装置の冷却の形
式は,換気及び空気吸入と同様に,特に重要である。建屋の設計に際して,設計者は,設計に必要な発電
装置の技術データを発電装置製造業者から入手しなければならない。
15.7
監視
発電プラントの監視範囲は,次による。これらの要件を考慮して,装置の使用及び運転のための準備を
確実にするように監視装置を選定する。
a) 予定している使用方法
b) 運転の形態
c) 発電装置の大きさ及び形式
d) 消費者の使用装置からの要件
e) 製造業者の要件
f)
注文者の要件
15.8
騒音
騒音がある値に制限される場合は,計画段階において,受渡当事者間で特別の協定がされなければなら
ない。移動式の発電装置において,騒音レベル測定が協定されている場合は,測定は製造業者の工場にお
いて,近接音場に適した測定方法によって行うことが望ましい。
注記1 音源の空気音の測定方法は,JIS B 8009-10に規定されている。
注記2 実際,長距離音場で測定を行っても,近接音場による測定と大きな相違はない。
定置式装置の場合は,騒音減衰の処置は通常設置場所において行われ,製造業者の工場での騒音レベル
の測定は騒音減衰なしでしか行うことができない。発電装置の騒音減衰が必要な場合は,測定は移動式発
電装置と同様に行ってもよい。
15.9
軸継手
軸継手は,ねじり振動に起因する応力を考慮して選択する。ねじり振動の応力は,例えば,次の項目に
よって影響を受ける。
a) 全負荷出力までの出力
b) 機関及び発電機の慣性モーメント
c) 短絡トルク
27
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 芯ずれ(ミスアラインメント)
e) 機関のミスファイヤ
最大の短絡トルクは,発電機端子における二相短絡の結果として発生する。
発電装置製造業者は,発電装置を構成する機器の整合性を考慮して設計する。
15.10 振動
15.10.1 一般
発電装置製造業者は,発電装置の振動系(機関−継手−発電機−基礎フレーム)に対し,常用運転範囲
において,振動特性が危険範囲外にあり,安全であることを実証又は確認する。発電所のその他の機器(例
えば,排気装置又は基礎)によって生じる振動についても考慮する。
15.10.2 ねじり振動
JIS B 8002-5によって発電装置のねじり振動解析を行う。
発電装置製造業者は,ねじり振動は危険範囲外にあり,安全であることを確認する。
前もって契約で協定されている場合には,発電装置製造業者は,ねじり振動の計算を行い,さらに,測
定を行う。ねじり振動の測定及び/又は計算結果は,発電装置製造業者,機関製造業者及び駆動される機
械の製造業者の間において協定され,更に必要な場合には,公的機関及び/又は船級協会の検査を受ける。
15.10.3 線形振動
15.10.3.1 動的曲げ変形
動的曲げ変形は,機関−継手−発電機から構成される回転系において,燃焼及び慣性力の影響又は発電
機の磁力の影響によって発生するため,個々の機器及び基礎フレームの設計時に,それらを考慮する。
15.10.3.2 構造的振動
15.10.3.2.1 一般
ねじり振動及び線形振動とは別に,機関の往復動慣性力及びトルクに起因する発電装置の振動が存在す
る。発電装置製造業者は,互いに相関する機器の整合性について,個々の機器の最大許容振動速度を超え
ないようにする。
15.10.3.2.2 測定位置及び測定条件
測定は軸受の水平方向及び/又は垂直方向で行う。
軸受に接近できない場合又は1軸受の交流発電機の場合には,測定は軸受のケーシングで行う。
振動速度の測定は,発電装置製造業者の試験台にて定格出力で行う。また,可能な場合は,設置場所の
据付けを模擬した条件で行う。
この試験において定格出力を負荷できない場合には,可能な最大出力を負荷する。
15.11
基礎
機関の台板用基礎又は設置面の寸法を決定するために,予想される静的荷重及び動的荷重のデータは発
電装置製造業者から入手する。周囲への不釣合い慣性力の影響を低減するためには,適切な弾性支持が必
要である。
設置場所におけるケーブル,配管などに必要な開口部を考慮する。弾性支持が使用されているならば,
ケーブル及び配管にはフレキシブル継手を用いる。
16
性能分類に対する作動限度値
16.1
一般
表4に規定する作動限度値は,ISO 8528-1:2005で規定する,発電装置の電圧動作及び周波数動作にとっ
28
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
て非常に重要な特性を決定するので,発電装置はこれらの作動限度値を満足しなければならない。
個々の性能分類の数値は,装置の構成機器相互の整合性をもつように選択する。
性能分類の全ての限度値を満足するように,発電装置の性能分類を選択する。
注文者は,その要求を満足する最低の性能分類を選択することが望ましい。
16.2
ガス機関の運転制限値についての推奨事項
ガス機関を使用する発電装置の性能については,受渡当事者間の協定(AMC)によって規定するのがよ
い。この協定の際には,大気条件とともに,機関の過渡運転に対する燃料のメタン指数及び真発熱量(低
位発熱量)の影響を考慮するのが望ましい。
29
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
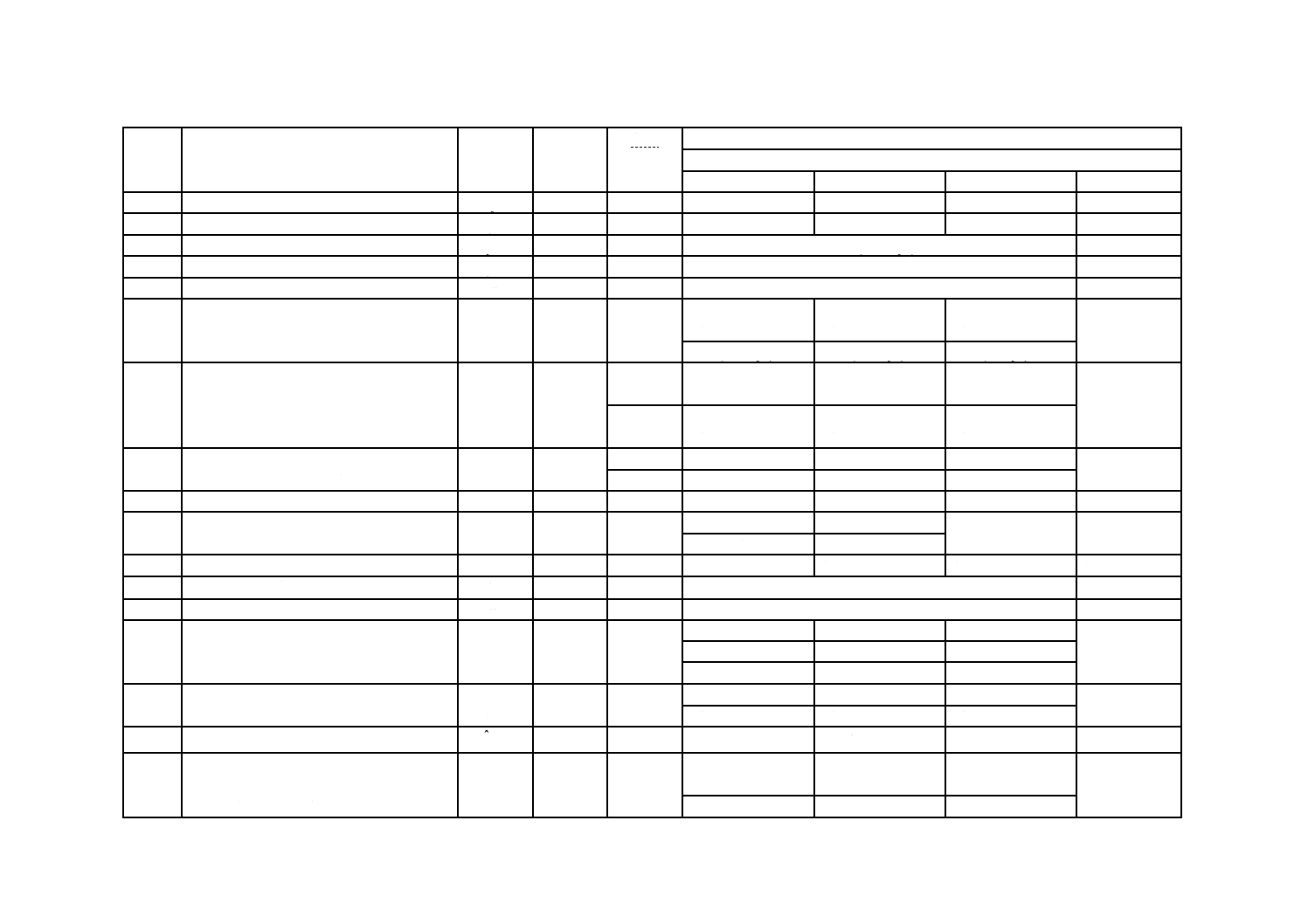
表4−作動限度値
番号
パラメータ
記号
単位
参照
作動限度値
性能分類
G1
G2
G3
G4
16.3
周波数ドループ
δfst
%
3.81
≦8
≦5
≦3 r)
AMC a)
16.4
定常周波数変化率
βf
%
3.68
≦2.5
≦1.5 b)
≦0.5
AMC
16.5
下限周波数設定範囲変化率
δfs,do
%
3.79
≧(2.5+δfst)
AMC
16.6
上限周波数設定範囲変化率
δfs,up
%
3.80
≧+2.5 c)
AMC
16.7
単位時間当たりの周波数設定範囲変化率
νf
%·s−1
3.34
0.2〜1
AMC
16.8
初期周波数からの瞬時の周波数変動率
δfd
%
3.69
AMC
100 %の瞬時負荷減少p)
3.71
≦+18
≦+12
≦+10
瞬時負荷増大d) e) q)
3.70
≦−(15+δfst) d)
≦−(10+δfst) d)
≦−(7+δfst) d)
16.9
定格周波数からの瞬時の周波数偏差
δfdyn
%
3.72
AMC
100 %の瞬時負荷減少p)
3.74
≦+18
≦+12
≦+10
瞬時負荷増大d) e) q)
3.73
≦−15 d)
≦−10 d)
≦−7 d)
≦−25 e)
≦−20 e)
≦−15 e)
16.10
周波数整定時間(負荷増大後の)
tf,in
s
3.22
≦10 f)
≦5 f)
≦3 f)
AMC
周波数整定時間(負荷減少後の)
tf,de
s
3.21
≦10 d)
≦5 d)
≦3 d)
16.11
周波数許容帯域変化率
αf
%
3.67
3.5
2
2
AMC
16.12
定常電圧偏差
δUst
%
3.85
≦±5
≦±2.5
≦±1
AMC
≦±10 g)
≦±1 h)
16.13
電圧不平衡率
δU2,0
%
3.89
1 i)
1 i)
1 i)
1 i)
16.14
電圧設定範囲変化率
δUs
%
3.86
±5
AMC
16.15
単位時間当たりの電圧設定範囲変化率
νU
%·s−1
3.35
0.2〜1
AMC
16.16
瞬時の電圧偏差
δUdyn
%
3.75
AMC
100 %の瞬時負荷減少
3.77
≦+35
≦+25
≦+20
瞬時負荷増大d) e)
3.76
≦−25 d)
≦−20 d)
≦−15 d)
16.17
電圧整定時間j)(負荷増大後の)
tU,in
s
3.30
≦10
≦6
≦4
AMC
電圧整定時間(負荷減少後の)
tU,de
s
3.29
≦10 d)
≦6 d)
≦4 d)
16.18
電圧変調率k) l)
s
mod,
ˆU
%
3.49
AMC
0.3 m) n)
0.3 n)
AMC
16.19
有効電力負荷分担o)
ΔP
%
13.1
AMC
呼び出力の80 %から100 %までの間
−
≦+5
≦+5
呼び出力の20 %から80 %までの間
−
≦+10
≦+10
1
9
B
8
0
0
9
-5
:
2
0
1
7
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
30
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
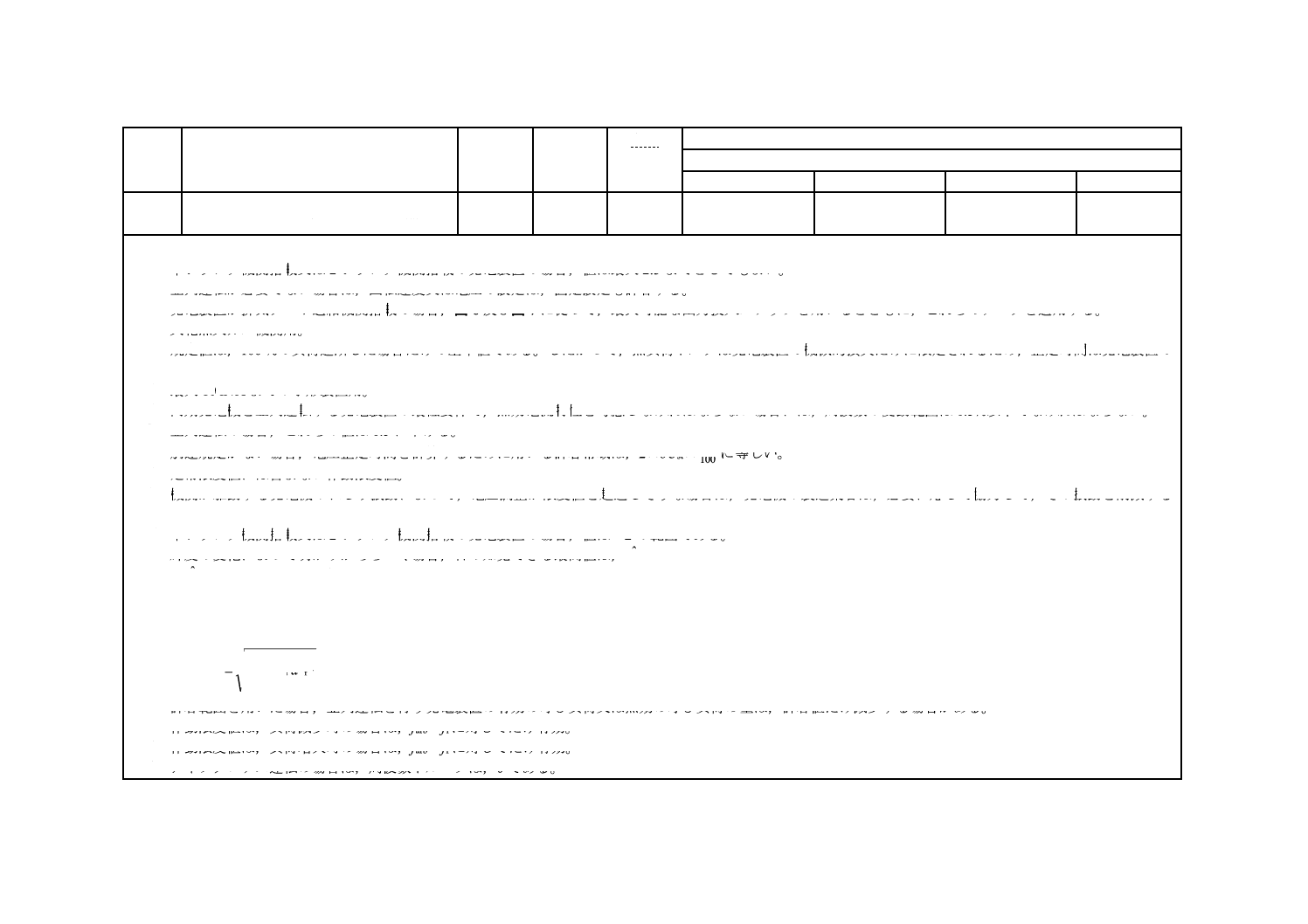
表4−作動限度値(続き)
番号
パラメータ
記号
単位
参照
作動限度値
性能分類
G1
G2
G3
G4
16.20
無効電力負荷分担
ΔQ
%
13.2
AMC
呼び出力の20 %から100 %までの間
−
≦+10
≦+10
注a) AMC=受渡当事者間の協定による。
b) 単シリンダ機関搭載又は2シリンダ機関搭載の発電装置の場合,値は最大2.5までとしてもよい。
c) 並列運転が必要でない場合は,回転速度又は電圧の設定は,固定設定も許容する。
d) 発電装置が排気ターボ過給機関搭載の場合,図6及び図7に従って,最大可能な出力投入ステップを用いるとともに,これらのデータを適用する。
e) 火花点火ガス機関用。
f) 規定値は,100 %の負荷遮断した場合だけの基準値である。したがって,無負荷トルクは発電装置の機械的損失だけに限定されるため,整定時間は発電装置の
全慣性モーメント及び機械的効率だけに依存するが,機関のアプリケーション及び/又は形式によって大きく変動することがある。
g) 最大10 kVAまでの小形装置用。
h) 同期発電機を並列運転する発電装置の最低要件で,無効電流特性を考慮しなければならない場合には,周波数の変動範囲は0.5%以下でなければならない。
i) 並列運転の場合,これらの値は0.5に下げる。
j) 別途規定がない場合,電圧整定時間を計算するために用いる許容帯域は,2×δUst×100r
Uに等しい。
k) 定常限度値には含まない作動限度値。
l) 機関が駆動する発電機のねじり振動によって,電圧調整が限度値を超過しそうな場合は,発電機の製造業者は,必要に応じて協力して,その振動を削減する
か,又は特殊な励磁制御装置を取り付けなければならない。
m) 単シリンダ機関搭載又は2シリンダ機関搭載の発電装置の場合,値は±2の範囲である。
n) 輝度の変化によって明かりがちらつく場合,目の知覚できる最高値は,
10
mod
ˆU
≦0.3 %の刺激をしきい値とする10 Hzの電圧変動である。
10
mod
ˆU
の任意の作動限度値は,10 Hzの正弦電圧変動に関係している。振幅afの周波数fでの電圧変動では,等価の10 Hzの振幅は次式による。
a10=gf×af
ここで,gfは,afに対応する重み係数であり,図12による。
全ての電圧変動のハーモニクスを考慮した場合,振幅は,次の式で表される等価の10 Hz電圧変調に対応する。
∑
=
=
n
i
i
ia
g
U
1
,f2
,f
2
10
mod
ˆ
o) 許容範囲を用いた場合,並列運転を行う発電装置の有効の呼び負荷又は無効の呼び負荷の量は,許容値だけ減少する場合がある。
p) 作動限度値は,負荷減少時の場合は,farb=fiに対してだけ有効。
q) 作動限度値は,負荷増大時の場合は,farb=frに対してだけ有効。
r) アイソクロナス運転の場合は,周波数ドループは,0である。
1
9
B
8
0
0
9
-5
:
2
0
1
7
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
31
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS B 8002-4 往復動内燃機関−性能−第4部:調速
注記 対応国際規格:ISO 3046-4,Reciprocating internal combustion engines−Performance−Part 4:
Speed governing(MOD)
[2] JIS B 8009-1:2001 往復動内燃機関駆動発電装置−第1部:用途,定格及び性能
注記 対応国際規格:ISO 8528-1:1993,Reciprocating internal combustion engine driven alternating
current generating sets−Part 1: Application, ratings and performance(MOD)
[3] JIS B 8009-2 往復動内燃機関駆動発電装置−第2部:機関
注記 対応国際規格:ISO 8528-2,Reciprocating internal combustion engine driven alternating current
generating sets−Part 2: Engines(MOD)
[4] JIS B 8009-10 往復動内燃機関駆動発電装置−第10部:空気音の測定方法
注記 対応国際規格:ISO 8528-10,Reciprocating internal combustion engine driven alternating current
generating sets−Part 10: Measurement of airborne noise by the enveloping surface method(MOD)
[5] JIS B 8009-12 往復動内燃機関駆動発電装置−第12部:非常用発電装置
注記 対応国際規格:ISO 8528-12,Reciprocating internal combustion engine driven alternating current
generating sets−Part 12: Emergency power supply to safety services(MOD)
32
B 8009-5:2017
附属書JA
(参考)
JISと対応国際規格との対比表
JIS B 8009-5:2017 往復動内燃機関駆動発電装置−第5部:発電装置
ISO 8528-5:2013,Reciprocating internal combustion engine driven alternating current
generating sets−Part 5: Generating sets
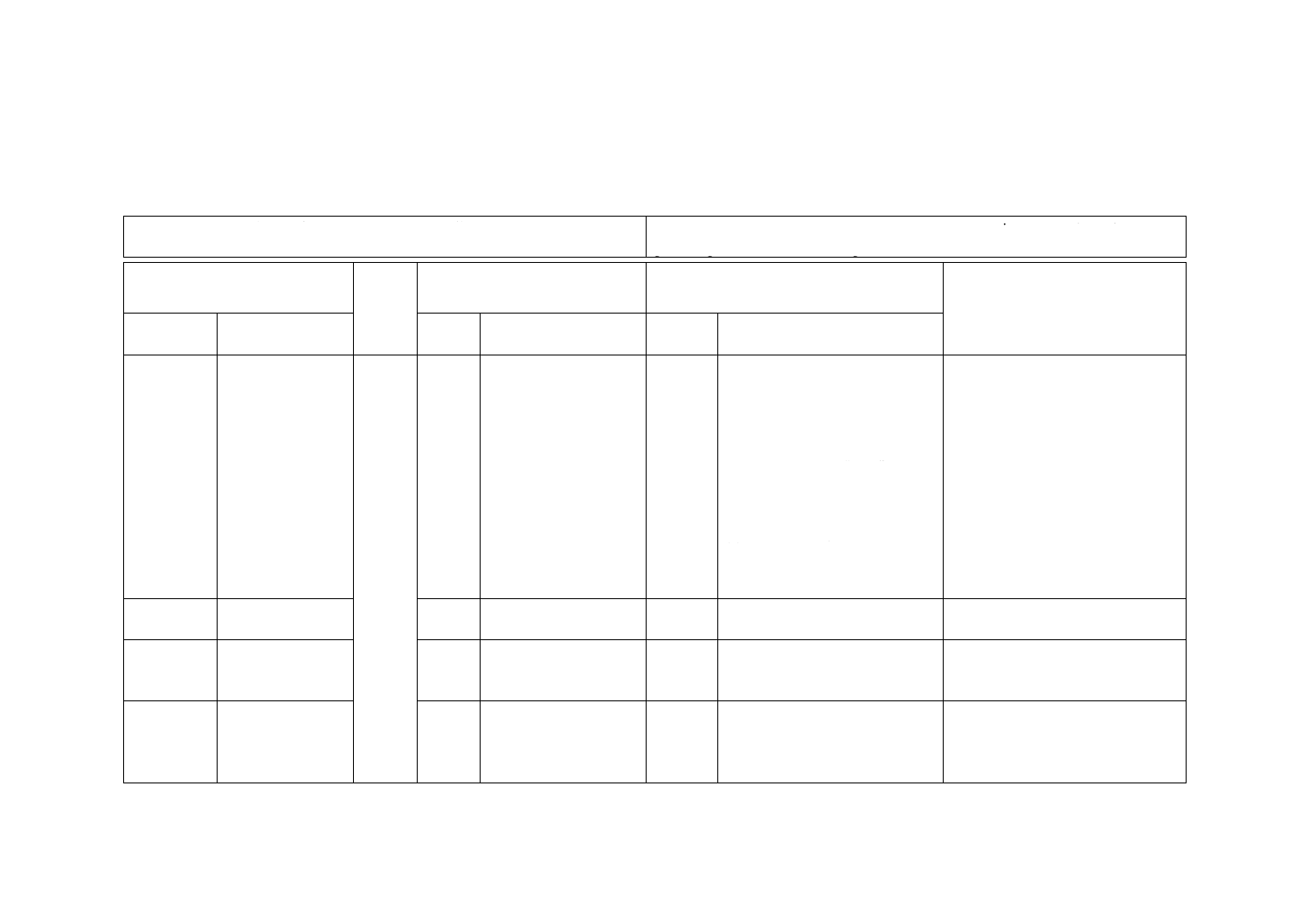
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
3 記号,用
語及び定義
この規格で用いる
記号,用語及び定
義の表
3
この規格で用いる記号,
用語及び定義の表
追加/
変更
(1) JISでは引用又は参照を容易
にするため記号及び用語の
(箇条)番号を追加した。
(2) 対応国際規格では,定義と注
記が併記されている。JISで
は,注記には“注記”の表示
を追加した。また,規定に相
当するものは,本文の該当箇
所へ移動した。
(3) JISでは,適宜記号及び用語
についての本文の参照箇所
の注記を追加した。
国際規格の定期見直し時に修正提
案する。
3.68 定常周
波数変化率
用語及び定義
なし
用語及び定義
変更
定義欄の注記が要求事項である
ので,本体の箇条5へ移動した。
国際規格の定期見直し時に修正提
案する。
3.69 瞬時の
周波数変動
率
用語及び定義
なし
なし
追加
対応国際規格に規定がないので
追加した。
国際規格の定期見直し時に修正提
案する。
3.72 定格周
波数からの
瞬時周波数
偏差
用語及び定義
なし
なし
追加
対応国際規格に規定がないので
追加した。
国際規格の定期見直し時に修正提
案する。
1
9
B
8
0
0
9
-5
:
2
0
1
7
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
33
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
3.74 負荷減
少時の瞬時
周波数偏差
用語及び定義
(+)なし
追加
負荷の変化と逆方向なので用語
に追加した。
国際規格の定期見直し時に修正提
案する。
3.75 瞬時電
圧偏差
用語及び定義
なし
なし
追加
対応国際規格に規定がないので
追加した。
国際規格の定期見直し時に修正提
案する。
3.76 負荷増
大時(−)
の瞬時電圧
偏差
用語及び定義
(−)なし
追加
負荷の変化と逆方向なので用語
に追加した。
国際規格の定期見直し時に修正提
案する。
3.77 負荷減
少時(+)
の瞬時電圧
偏差
用語及び定義
(+)なし
追加
負荷の変化と逆方向なので用語
に追加した。
国際規格の定期見直し時に修正提
案する。
5 周波数特
性 図1
周波数特性及び記
号の説明
5
周波数特性及び記号の
説明
変更
対応国際規格では,図1の横軸に
100 %が最大の出力限度と示され
ているが,必ずしも100 %とは限
らないので,“100 %”を“出力限
度”に変更した。
国際規格の定期見直し時に修正提
案する。
9.3 過渡時
周波数及び
電圧に影響
を及ぼす要
因
発電装置の負荷変
動に対する周波数
及び電圧特性に影
響する要因及び留
意事項
9.3
発電装置の負荷変動に
対する周波数及び電圧
特性に影響する要因及
び留意事項
追加
瞬時電圧偏差及び瞬時周波数偏
差に関する規定を,箇条3,表1
から転記した。
国際規格の定期見直し時に修正提
案する。
1
9
B
8
0
0
9
-5
:
2
0
1
7
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
34
B 8009-5:2017
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
13.1.1 有効
電力負荷分
担に影響を
及ぼす要因
発電装置の並列運
転の場合の有効電
力負荷分担に影響
を及ぼす要因
13.1.1
発電装置の並列運転の
場合の有効電力負荷分
担に影響を及ぼす要因
変更
(1) JISでは,図10及び図10A
は発電装置の並列運転にお
ける周波数,出力及び有効電
力負荷分担の設定範囲の例
を示す説明図であるとの記
載を追加した。
(2) 対応国際規格の図10では,
出力の設定上限が100 %出力
と示されているが,JISでは
出力上限が100 %を超える場
合を示す,旧規格の図9を図
10Aとして追加した。
(技術的差異の理由)
(1) 国内では有効電力負荷分担の設
定の際に,図10を参考に使用さ
れることがあるため,対応国際
規格の,100 %定格負荷を出力限
度とする図に限定して改正する
と,混乱を生じるおそれがある。
(2) 設定負荷の上限は,必ずしも
100 %定格負荷ではないので,旧
規格の設定負荷の上限が100 %
を超える場合の例も残した。
(今後の対策)
国際規格の定期見直し時に (1) 及
び (2) について修正提案する。
14 a) 装置用
の定格銘板
発電装置に付ける
銘板及び記載項目
の規定。図13に定
格銘板の例を示
す。
14
発電装置に付ける銘板
及び記載項目の規定。図
13に定格銘板の例を示
す。
追加/
削除
(1) JISでは,旧規格の小出力発
電装置への例外事項の規定
を追加した。
(2) JISでは,国際規格の図13に
記載されている項目のうち,
設置場所の海抜最大高度及
び最高大気温度を削除した。
(3) JISでは,定格銘板の表題は
“発電装置”だけとするよう
に変更した。
(4) JISでは,定格銘板の記載項
目のうち,出力の種別及び性
能分類は,省略してもよいと
の規定を追加した。
(5) 6)の性能分類は,JIS B
8009-1:2001に規定するもの
と同等との注記を追加した。
(技術的差異の理由)
特に,技術的な影響のない事項であ
るので,国内で発電装置の慣例に従
った。
(今後の対策)
(1)〜(4)は,国際規格の定期見直し時
に修正提案する。
1
9
B
8
0
0
9
-5
:
2
0
1
7
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
35
B 8009-5:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
15.10.2
ね
じり振動
発電装置のねじり
振動解析について
の規定。
15.10.2
発電装置のねじり振動
解析についての規定。
追加
JISでは,旧規格に規定されてい
る,ねじり振動に関する契約上の
留意事項を追加した。
国際規格の定期見直し時に修正提
案する。
JISと国際規格との対応の程度の全体評価:ISO 8528-5:2013,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
1
9
B
8
0
0
9
-5
:
2
0
1
7
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。