B 7912-8:2018
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 一般······························································································································· 3
4.1 概要 ···························································································································· 3
4.2 要求事項 ······················································································································ 3
4.3 試験手順概要 ················································································································ 4
5 簡易試験手順 ··················································································································· 5
5.1 測定 ···························································································································· 5
5.2 計算 ···························································································································· 5
6 標準試験手順 ··················································································································· 6
6.1 測定 ···························································································································· 6
6.2 計算 ···························································································································· 6
6.3 統計的検定 ··················································································································· 8
6.4 合成標準不確かさの評価(タイプA及びタイプB) ···························································· 10
附属書A(参考)簡易試験手順の例 ························································································ 11
附属書B(参考)標準試験手順の例 ························································································ 12
附属書C(参考)不確かさバジェットの計算例(タイプA及びタイプB) ····································· 16
参考文献 ···························································································································· 18
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 19
B 7912-8:2018
(2)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
測量機器工業会(JSIMA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業
規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業
規格である。これによって,JIS B 7912-8:2010は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS B 7912の規格群には,次に示す部編成がある。
JIS B 7912-1 第1部:理論
JIS B 7912-2 第2部:レベル
JIS B 7912-3 第3部:セオドライト
JIS B 7912-4 第4部:光波測距儀
JIS B 7912-5 第5部:トータルステーション
JIS B 7912-6 第6部:回転レーザ
JIS B 7912-8 第8部:GNSS(RTK)
日本工業規格 JIS
B 7912-8:2018
測量機器の現場試験手順−第8部:GNSS(RTK)
Field procedures for testing geodetic and surveying instruments-
Part 8: GNSS (RTK)
序文
この規格は,2015年に第2版として発行されたISO 17123-8を基とし,統計的検定についてはISO 2854
及びJIS Z 9041-2の規定に合わすため,技術的内容を変更して作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,RTKによる作業を実施する前に,使用するGNSS機器のRTKによる作業への適応性を確
認するための試験手順について規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 17123-8:2015,Optics and optical instruments−Field procedures for testing geodetic and surveying
instruments−Part 8: GNSS field measurement systems in real-time kinematic (RTK)(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 7911 測量機器用三脚
注記 対応国際規格:ISO 12858-2,Optics and optical instruments−Ancillary devices for geodetic
instruments−Part 2: Tripods(MOD)
JIS B 7912-1 測量機器の現場試験手順−第1部:理論
注記 対応国際規格:ISO 17123-1,Optics and optical instruments−Field procedures for testing geodetic
and surveying instruments−Part 1: Theory(MOD)
JIS B 7912-5 測量機器の現場試験手順−第5部:トータルステーション
注記 対応国際規格:ISO 17123-5,Optics and optical instruments−Field procedures for testing geodetic
and surveying instruments−Part 5: Total stations(MOD)
JIS Z 8101-1 統計−用語及び記号−第1部:一般統計用語及び確率で用いられる用語
注記 対応国際規格:ISO 3534-1,Statistics−Vocabulary and symbols−Part 1: General statistical terms
2
B 7912-8:2018
and terms used in probability(MOD)
JIS Z 8103 計測用語
ISO 4463-1:1989,Measurement methods for building−Setting-out and measurement−Part 1: Planning and
organization, measuring procedures, acceptance criteria
ISO 9849,Optics and optical instruments−Geodetic and surveying instruments−Vocabulary
ISO/IEC Guide 98-3,Uncertainty of measurement−Part 3: Guide to the expression of uncertainty in
measurement (GUM:1995)
ISO/IEC Guide 99,International vocabulary of metrology−Basic and general concepts and associated terms
(VIM)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 7912-1,JIS B 7912-5,JIS Z 8101-1,JIS Z 8103,ISO 9849,
ISO/IEC Guide 98-3及びISO/IEC Guide 99によるほか,次による。
3.1
GNSS(global navigation satellite system)
人工衛星からの信号を用いて位置を決定する衛星測位システムの総称。
注記 例えば,GPS,GLONASS,Galileo,準天頂衛星などの衛星測位システムがある。
3.2
RTK(real-time kinematic)
固定局で観測したGNSSデータを無線通信などで移動局へ送信し,固定局観測データと移動局観測デー
タとで搬送波位相処理による実時間解析を行い,移動局の位置を即時決定する測位手法。
3.3
固定局
RTKにおいて既知点側に設置するGNSS観測及びデータ送信装置。ベースともいう。
3.4
移動局
RTKにおいて位置を求める新点側で使用するGNSS測位及びデータ受信装置。ローバともいう。
3.5
ネットワークがた(型)RTK
複数の固定局が設置された地域において,固定局で取得したGNSS信号と,それらのGNSS信号を用い
て算出した補正情報とを用いて移動局で取得したGNSS信号を解析処理することによって,移動局の位置
を即時決定する測位手法。
3.6
アンテナ位相特性モデル
GNSS信号を受信するアンテナの器械的な基準位置と電気信号の参照位置(位相中心という。)との間で
生じるずれを表現するためのモデル。
3.7
PDOP(position dilution of precision)
測位に用いるGNSS衛星の幾何学的配置に起因して生じる測位精度の低下を示す指標。
3
B 7912-8:2018
3.8
整数値バイアス(ambiguity)
信号受信開始時におけるGNSS衛星からの搬送波の波数の整数部。直接観測することはできないが,計
算処理によって決定される。
3.9
周波数間バイアス,IFB(inter frequency bias)
固定局と移動局との受信機が異なる場合,受信機内で生じるGLONASS衛星の周波数間における遅延量
の差が異なる値をもつこと。この差を補正しないとGLONASS信号による正しい測位を行うことができな
い。
4
一般
4.1
概要
RTK測位法は,固定局(ベース)と移動局(ローバ)とが受信したデータを使用する相対測位法である。
両方のGNSS受信機は同時に観測を行い,無線通信などを利用して固定局と移動局とのデータを組み合わ
せる。ネットワークがた(型)RTKを利用する場合は,使用者は固定局を設置する必要がない。
移動局の座標は,適切な測地系(例 ITRF:International Terrestrial Reference Frame:国際地球基準座標
系)で表示する。実用上,それらは平面座標及びだ(楕)円体高に変換される。この規格では,これらの
タイプの座標だけを観測量として扱う。
4.2
要求事項
使用者は,測量を始める前に,使用するGNSS機器が実施する測量に適した精度を満たしているか確認
する。
試験は,製造業者の取扱説明書に記載されているGNSS受信機とアンテナとの組合せに適用する。
アンテナ位相特性モデルを使用する場合には,使用するアンテナがそのモデルに適合することを確認す
る。固定局と移動局とで異なる受信機を使用しGLONASS信号を取得する場合,周波数間バイアスが正し
く補正されることを確認する。
受信機,アンテナ及び附属機器は,取扱説明書に指定されている方法によって,使用可能な状態になる
よう調整されていなければならない。
使用者は,試験条件として,最少衛星数,PDOPの最大値,最短観測時間及びその他測位のための必要
条件について,取扱説明書のガイドラインに従わなければならない。
使用者は,各測定作業ごとに電源を切断,再投入することなどによって受信機を初期化し,整数値バイ
アスの決定後データを記録する。
観測に当たっては,次の値をアンテナ位置の標準偏差の指針とする。
− 致心
1 mm
− アンテナ高の測定
1 mm
試験の結果は,測点で観測可能な衛星の配置,電離層・対流圏の条件,測点周囲のマルチパス環境,機
器の精度,データ処理ソフトウエアの性能など,幾つかの要因によって影響を受けることを考慮しなけれ
ばならない。
この規格では,簡易試験手順及び標準試験手順の異なる二つの手順について規定する。両者の違いは試
験の観測方法及び結果の判定基準である。使用者は,GNSS機器を使用する作業要求に適合する方法を選
ばなければならない。
4
B 7912-8:2018
4.3
試験手順概要
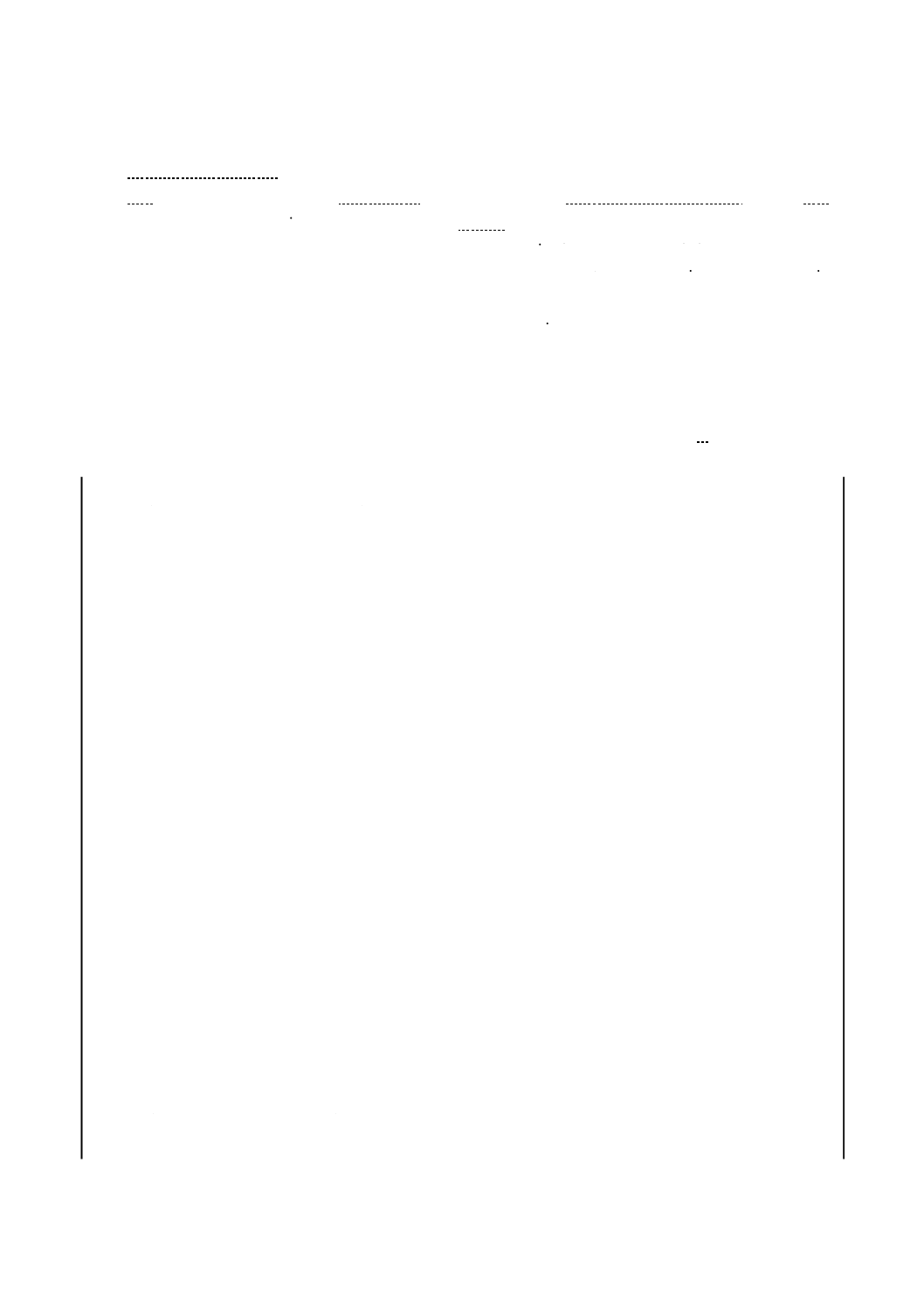
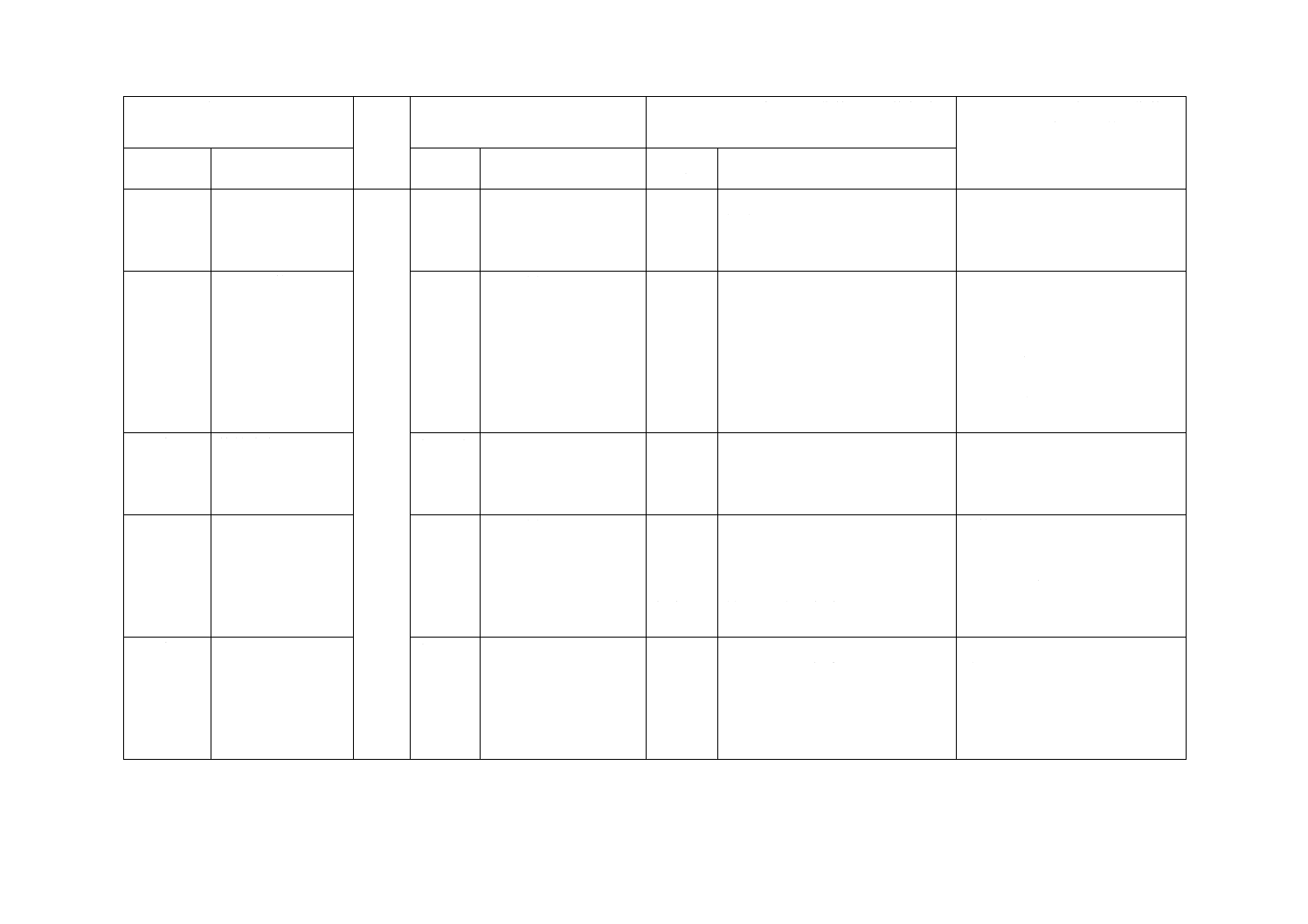
試験場は,作業地域近傍に設定し,移動局測点を2点設置する。移動局測点間は,2 m以上20 mを超え
ないようにする。この移動局測点の位置は,都合のよい場所を選択してもよい(図1参照)。
この移動局測点間の水平距離及び高低差は,3 mmよりも高い精度をもつRTK以外の方法で決定してお
かなければならない。これらの値は基準値とみなし両方の試験手順の第一段階で使用される。各セット1)
の測定で得られた座標から計算した水平距離及び高低差を基準値と比較し,測定値が異常な値でないこと
を確認する。
基準値は,統計的検定の中では使用しない。
注1) 各セットの測定は,連続する移動局測点1及び移動局測点2の測定をいう。
図1−試験場での測点の配置
1シリーズの測定は,5セットからなり,連続するセット間の時間は約5分とする。この要求によって測
定時間は25分程度になる。
典型的なマルチパスの変動周期は20分程度なので,この試験手順はその影響の大部分を含めることがで
きる。
3シリーズの測定を行う標準試験手順では,各シリーズ開始時刻は少なくとも90分の間隔をおかなけれ
ばならない。その結果,全観測時間が3時間以上になるので,測定値から算出される統計量は,衛星位置
の変化,大気層の状態変化などの長周期の影響を反映したものとなる。
簡易試験手順は,1シリーズの測定だけからなり,統計的な評価は行わず異常値の検出だけに使用する。
標準試験手順は,3シリーズの測定からなり,標準偏差の推定及び統計的検定を行う。
a) 簡易試験手順 簡易試験手順は,1シリーズの測定からなり,使用している機器の精度がISO 4463-1
に従った許容偏差内に収まっているかどうかに関する判断材料を提供する。この手順は,限られた数
の測定値に基づいているので,有意な標準偏差を得ることができない。したがって,統計的検定は適
用しない。機器の,より正確な評価が必要な場合には,b) に規定する標準試験手順を採用する。
b) 標準試験手順 標準試験手順は,3シリーズの測定からなり,水平位置及び高さの標準偏差を求め,
機器の精度の確認に適用する。
さらに,この手順は,次の事項を決定するために使用することもできる。
○
○ 移動局測点1
固定局 △
2〜20 m
移動局測点2
5
B 7912-8:2018
− 特定の環境(短期,又は長期的変動を含む。)の下での機器の精度
− 異なる時期,又は異なる条件の下で使用する機器の精度(複数の母集団のサンプル)
− 異なる機器間の,類似の条件の下での精度の比較
統計的検定は,“試験で得たサンプルが,特定の母集団に属するかどうか”,及び“異なる試験から得ら
れた二つのサンプルが同じ母集団に属するかどうか”を判断するために適用する。
5
簡易試験手順
5.1
測定
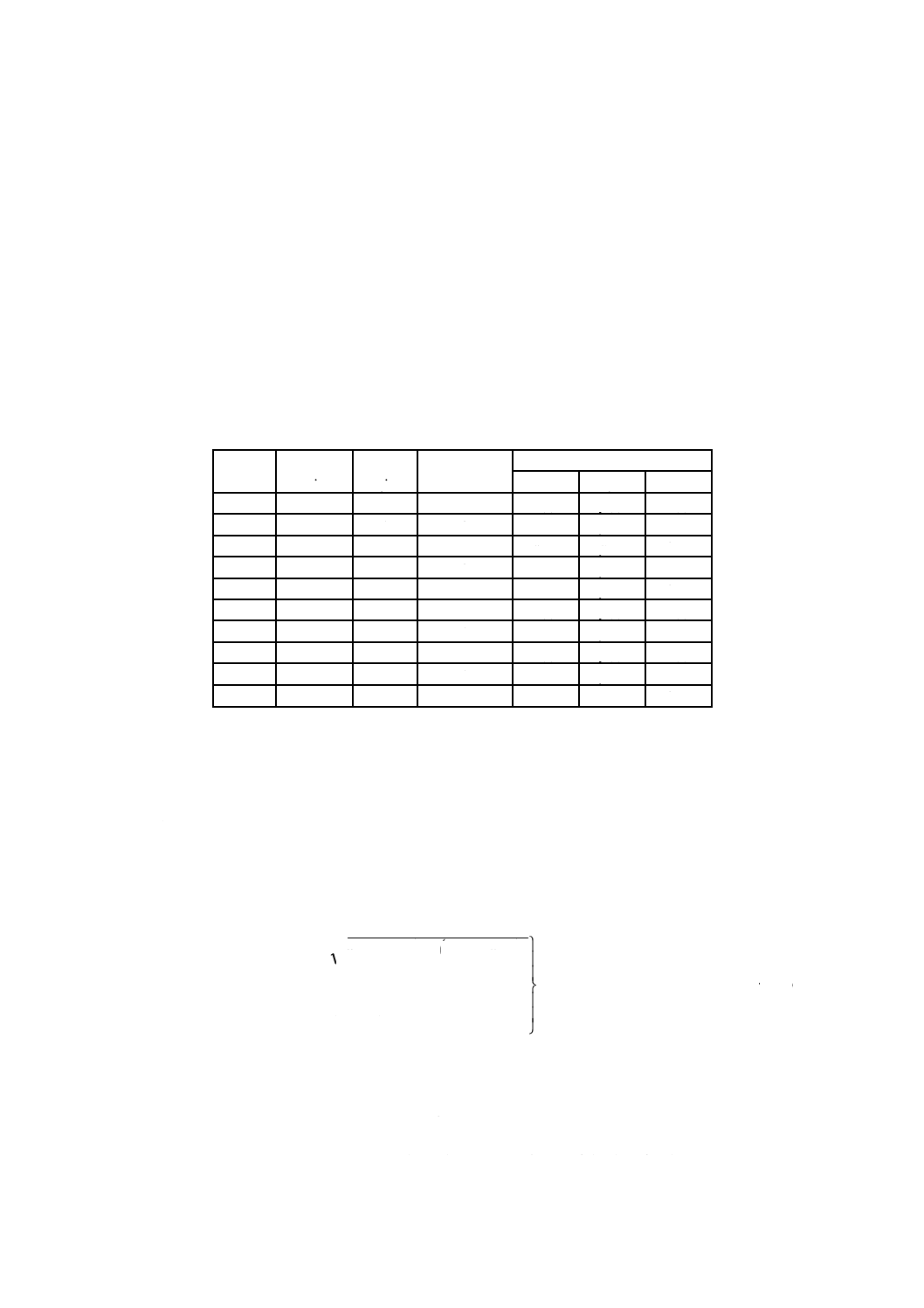
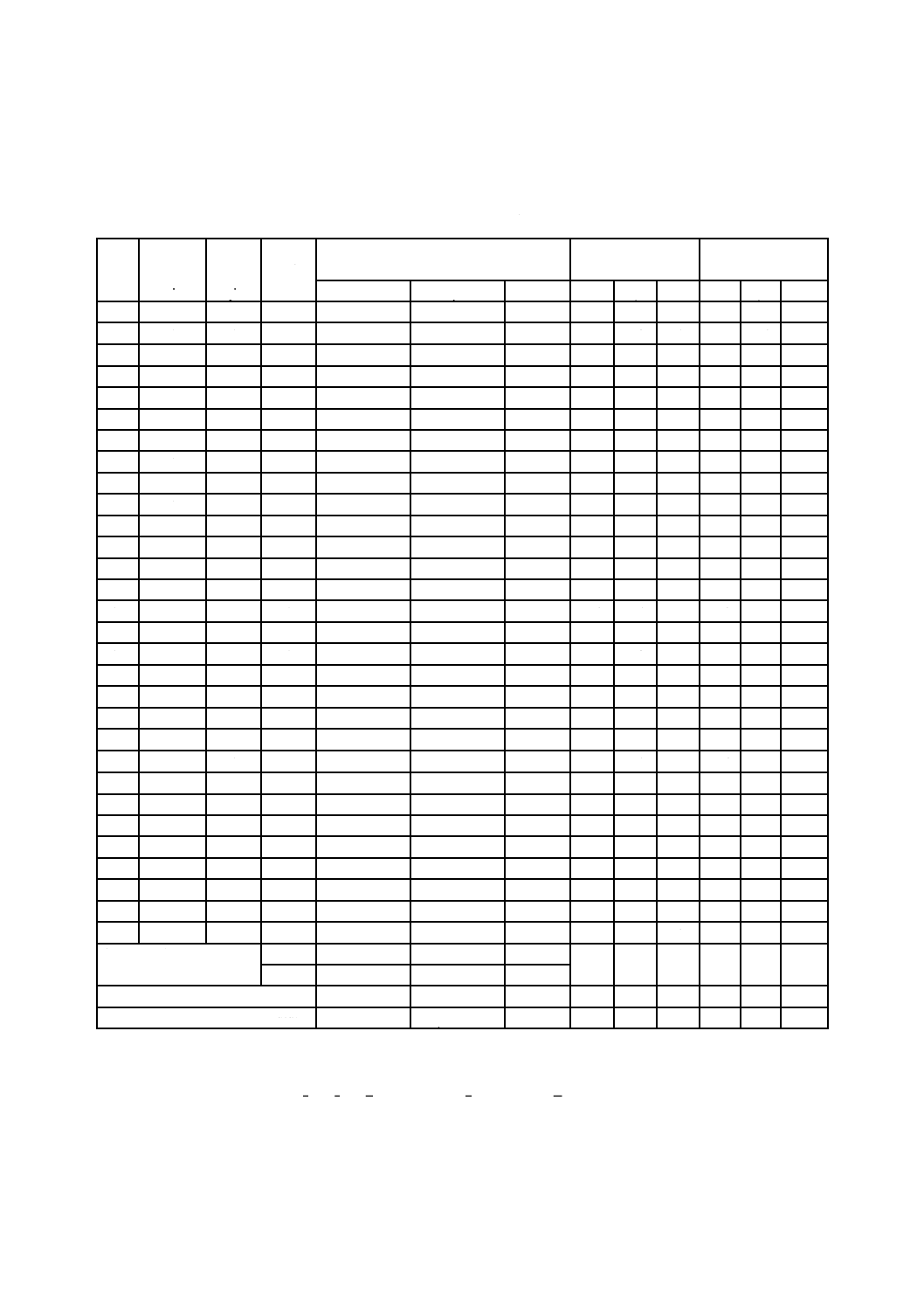
簡易試験法では1シリーズの測定を行う。シリーズは,移動局測点1及び2について5セットの測定で
構成する。測定の進め方は,表1の“測定No.”に規定する順序で行う。
表1−シリーズの測定順序
測定
シリーズ
セット
移動局測点
測定値
No.
i
j
k
x
y
h
1
1
1
1
x1,1,1
y1,1,1
h1,1,1
2
1
1
2
x1,1,2
y1,1,2
h1,1,2
3
1
2
1
x1,2,1
y1,2,1
h1,2,1
4
1
2
2
x1,2,2
y1,2,2
h1,2,2
5
1
3
1
x1,3,1
y1,3,1
h1,3,1
6
1
3
2
x1,3,2
y1,3,2
h1,3,2
7
1
4
1
x1,4,1
y1,4,1
h1,4,1
8
1
4
2
x1,4,2
y1,4,2
h1,4,2
9
1
5
1
x1,5,1
y1,5,1
h1,5,1
10
1
5
2
x1,5,2
y1,5,2
h1,5,2
測定の各成分はxi,j,k,yi,j,k,hi,j,kで表し,x,y,hはローカル座標系(平面直角座標系,局所地平座標系な
ど)の座標値を示す。添え字iはシリーズ番号,jはセット番号,kは移動局測点番号を示す。例えば,x1,3,2
は,最初のシリーズの,3セット目の,移動局測点2におけるx成分である。
5.2
計算
個々の測定値を基準値と比較し,水平及び高さ両成分の偏差を求める。
それぞれのセットj(=1,…,5)の二つの移動局測点間の水平距離,高低差及び基準値からの偏差は,
式(1)によって求める。
(
)(
)
∆
−
∆
=
−
=
−
=
∆
−
+
−
=
*
,
,
,
,
1,
,
2,
,
,
2
1,
,
2,
,
2
1,
,
2,
,
,
h
h
D
D
h
h
h
y
y
x
x
D
j
i
j
hi
j
i
j
Di
j
i
j
i
j
i
j
i
j
i
j
i
j
i
j
i
ε
ε
············································ (1)
ここに, i=1,j=1,…,5
xi,j,k,yi,j,k,hi,j,k: シリーズiの,jセット目の移動局測点kの測定座
標値x,y,h
Di,j,Δhi,j: シリーズiの,jセット目の水平距離及び高低差の
計算値
D*,Δh*: 水平距離及び高低差の基準値
6
B 7912-8:2018
εDi,j,εhi,j: 水平距離及び高低差の偏差
偏差が条件式(2)のいずれか又は双方を満足しない場合には,試験条件などを確認し,再度1シリーズの
測定を行う。
×
×
×
×
h
j
hi
xy
j
Di
0
,
0
,
2
5.2
2
5.2
σ
ε
σ
ε
≦
≦
······························································· (2)
ここに,σ0 xy及びσ0 hは,それぞれ標準試験手順によってあらかじめ求めた水平位置及び高さの標準偏差,
又は別途指定された(例えば,製造業者が指定した)標準偏差であり,2.5はISO 4463-1で規定された値
である(附属書A参照)。
6
標準試験手順
6.1
測定
標準試験手順では,3シリーズの測定を行う。
各シリーズの測定順序は,簡易試験の場合と同一であり,表1による。
シリーズの開始時刻は,少なくとも90分の間隔を空けなければならない。
6.2
計算
6.2.1
一般
計算は,測定値の確認及び標準偏差の計算の2段階で行う。第1段階は,異常値の有無確認のためで,
個々の測定値と基準値とを直接比較する。第2段階は,標準偏差を得るための計算である。これらの手順
を次に規定する。
6.2.2
測定値の確認
3シリーズの全ての測定値に対して,5.2の手順を適用する。
6.2.3
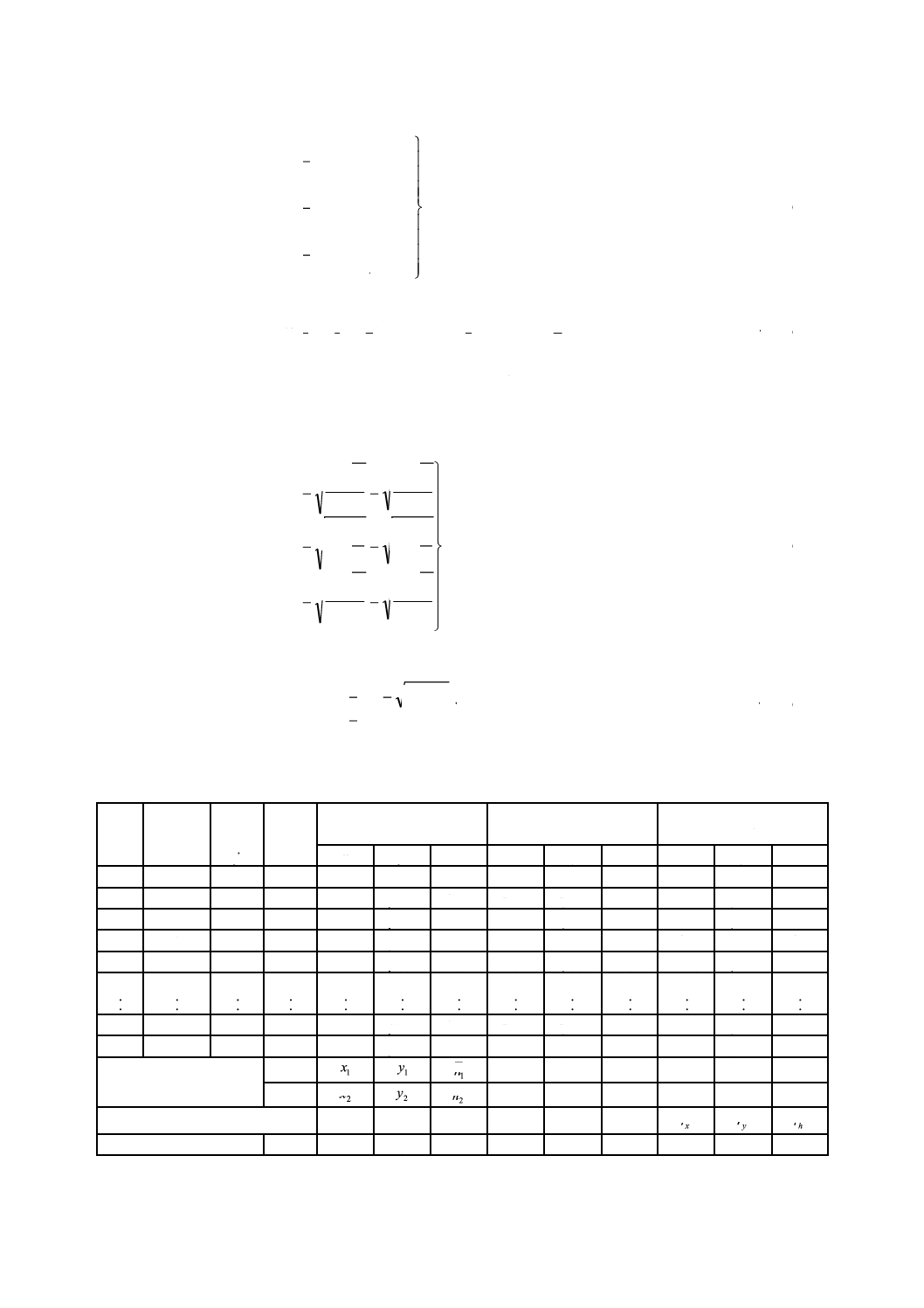
測定値の標準偏差の計算
3シリーズの全ての測定値に対して,統計的方法を適用する。
移動局測点k(=1,2)のx,y及びhの平均値は,式(3)によって求める(表2参照)。
=
=
=
=
∑∑
∑∑
∑∑
=
=
=
=
=
=
2
,1
15
1
15
1
15
1
3
1
5
1
,
,
3
1
5
1
,
,
3
1
5
1
,
,
k
h
h
y
y
x
x
i
j
k
j
i
k
i
j
k
j
i
k
i
j
k
j
i
k
··································································· (3)
次に,3シリーズの全ての測定におけるx,y及びhの残差は,式(4)によって求める。
=
=
=
−
=
−
=
−
=
2
,1
,5,
,1
,3,2,1
,
,
,
,
,
,
,
,
,
,
,
,
k
j
i
h
h
r
y
y
r
x
x
r
k
j
i
k
k
j
i
h
k
j
i
k
k
j
i
y
k
j
i
k
k
j
i
x
Λ
··············································· (4)
両移動局測点(k=1,2)の測定を一括し,各座標成分x,y及びhの残差の二乗和は,式(5)によって求
める。
7
B 7912-8:2018
=
=
=
∑∑∑
∑∑∑
∑∑∑
=
=
=
=
=
=
=
=
=
3
1
5
1
2
1
2
,
,
2
3
1
5
1
2
1
2
,
,
2
3
1
5
1
2
1
2
,
,
2
i
j
k
k
j
i
h
h
i
j
k
k
j
i
y
y
i
j
k
k
j
i
x
x
r
r
r
r
r
r
·································································· (5)
x,y及びhの自由度は同一である。これらは,式(6)によって求める。
(
)
(
)
28
2
1
5
3
1
=
×
−
×
=
×
−
×
=
=
=
p
n
m
h
y
x
ν
ν
ν
··································· (6)
ここに,
m: シリーズ数
n: シリーズ内のセット数
p: 移動局測点数
1測定のx,y及びhの標準偏差は,式(7)によって求める。
=
=
=
=
=
=
∑
∑
∑
∑
∑
∑
28
28
28
2
2
2
2
2
2
h
h
h
h
y
y
y
y
x
x
x
x
r
r
s
r
r
s
r
r
s
ν
ν
ν
······························································ (7)
ここに,機器がもつ水平位置の標準偏差sJIS-GNSS-xy及び高さの標準偏差sJIS-GNSS-hを,次のように定義する。
h
y
x
xy
s
s
s
s
s
s
=
+
=
=
h-
GNSS
-
JIS
2
2
xy
-
GNSS
-
JIS
····························································· (8)
表2−残差及び標準偏差の計算
観測
No.
シリーズ セット 移動局
測点
測定値
m
残差
mm
二乗残差
mm2
i
j
k
x
y
h
rx
ry
rh
rx2
ry2
rh2
1
1
1
1
x1,1,1
y1,1,1
h1,1,1
rx1,1,1
ry1,1,1
rh1,1,1
rx21,1,1
ry21,1,1
rh21,1,1
2
1
1
2
x1,1,2
y1,1,2
h1,1,2
rx1,1,2
ry1,1,2
rh1,1,2
rx21,1,2
ry21,1,2
rh21,1,2
3
1
2
1
x1,2,1
y1,2,1
h1,2,1
rx1,2,1
ry1,2,1
rh1,2,1
rx21,2,1
ry21,2,1
rh21,2,1
4
1
2
2
x1,2,2
y1,2,2
h1,2,2
rx1,2,2
ry1,2,2
rh1,2,2
rx21,2,2
ry21,2,2
rh21,2,2
5
1
3
1
x1,3,1
y1,3,1
h1,3,1
rx1,3,1
ry1,3,1
rh1,3,1
rx21,3,1
ry21,3,1
rh21,3,1
…
…
…
…
…
…
…
…
…
…
…
…
…
29
3
5
1
x3,5,1
y3,5,1
h3,5,1
rx3,5,1
ry3,5,1
rh3,5,1
rx23,5,1
ry23,5,1
rh23,5,1
30
3
5
2
x3,5,2
y3,5,2
h3,5,2
rx3,5,2
ry3,5,2
rh3,5,2
rx23,5,2
ry23,5,2
rh23,5,2
各組の平均値
1
1x
1y
1h
2
2x
2y
2h
残差二乗和
2
xr
2
yr
2
hr
標準偏差 s
mm
sx
sy
sh
8
B 7912-8:2018
水平位置の標準不確かさuJIS-GNSS RTK-xy及び高さの標準不確かさuJIS-GNSS RTK-hを,次のように定義する。
xy
-
RTK
GNSS
-
JIS
xy
-
RTK
GNSS
-
JIS
s
u
=
·························································· (9)
h
-
RTK
GNSS
-
JIS
h
-
RTK
GNSS
-
JIS
s
u
=
·························································· (10)
6.3
統計的検定
6.3.1
概論
統計的検定は,標準試験手順だけに適用する。
測定結果の評価のために水平位置の標準偏差sxy及び高さの標準偏差sh,並びにこれらの自由度を用い,
統計的検定を行う(表3参照)。
統計的検定のための設問は,次による。
a) 水平位置の標準偏差sxyをもたらした母集団の標準偏差σxyは,別途示された(例えば,製造業者が示
した)標準偏差σ0 xyと等しいか,又は小さいか。
b) 高さhの標準偏差shをもたらした母集団の標準偏差σhは,別途示された(例えば,製造業者が示した)
標準偏差σ0 hと等しいか,又は小さいか。
c) 二つの異なったサンプルから求められた水平位置の標準偏差sxy及びxy
s~は,同じ母集団に属している
か。
d) 二つの異なったサンプルから求められた高さの標準偏差sh及びhs~は,同じ母集団に属しているか。
標準偏差sxy,xy
s~,sh及びhs~は,例えば,次のいずれかから得ることができる。
− 異なる時期に同じ機器を用いて得られた二つの測定サンプル
− 異なる機器を用いて得られた二つの測定サンプル
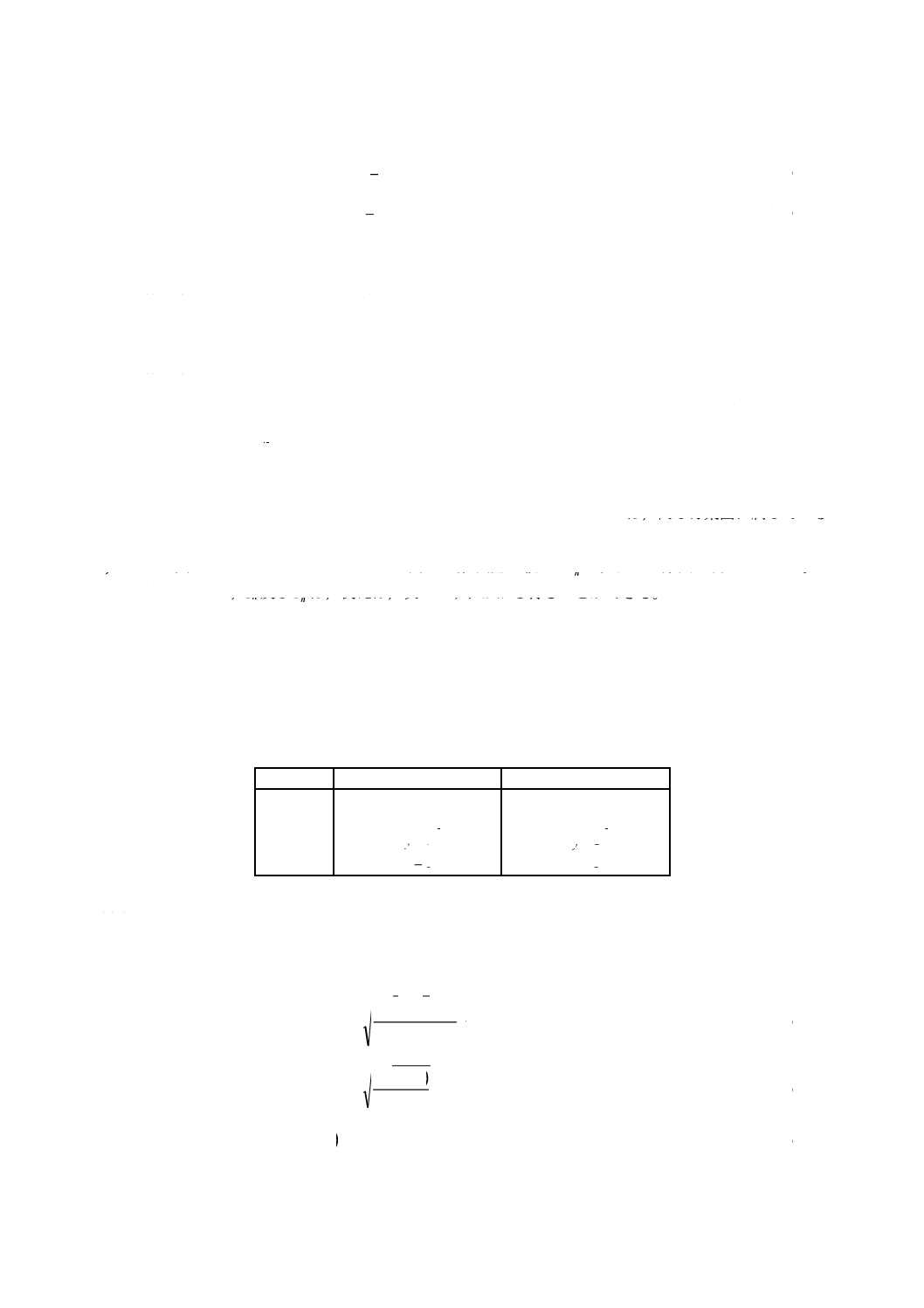
表3の統計的検定は,測定手順から決まる自由度vx+vy=56,vh=28及び信頼水準1−α=0.95の条件で
実行する。
表3−統計的検定
問
帰無仮説(H0)
対立仮説(H1)
a)
σxy≦σ0 xy
σxy>σ0 xy
b)
σh≦σ0 h
σh>σ0 h
c)
xy
xyσ
σ
~
=
xy
xyσ
σ
~
≠
d)
h
hσ
σ
~
=
h
hσ
σ
~
≠
6.3.2
問a)
水平位置の標準偏差sxyをもたらした母集団の標準偏差が既定の値σ0 xyに等しい,又はより小さいという
帰無仮説は,次の条件が満たされれば棄却されない。
(
)
y
x
y
x
xy
s
ν
ν
ν
ν
χ
σ
+
+
×
2
95
.0
xy
0
≦
··························································(11)
()
56
56
2
95
.0
0
χ
σ
×
xy
xy
s≦
······························································ (12)
()
47
.
74
56
2
95
.0
=
χ
······································································ (13)
9
B 7912-8:2018
15
.1
56
47
.
74
0
xy
0
×
=
×
xy
xy
s
σ
σ
≦
··················································· (14)
以上の条件が満たされない場合は,帰無仮説は棄却される。
6.3.3
問b)
高さの標準偏差shをもたらした母集団の標準偏差が既定の値σ0 hに等しい,又はより小さいという帰無
仮説は,次の条件が満たされれば棄却されない。
()
h
h
hs
ν
ν
χ
σ
2
95
.0
h
0×
≦
································································ (15)
()
28
28
2
95
.0
h
0
χ
σ×
≦
hs
································································ (16)
()
34
.
41
28
2
95
.0
=
χ
······································································ (17)
22
.1
28
34
.
41
h
0
h
0
×
=
×
σ
σ
≦
h
s
···················································· (18)
以上の条件が満たされない場合は,帰無仮説は棄却される。
6.3.4
問c)
二つの異なったサンプルから求められた水平位置の標準偏差sxy及びxy
s~が同じ母集団に属しているかど
うかについて統計的検定を行う。帰無仮説
xy
xyσ
σ
~
=
は,次の条件が満たされれば棄却されない。
(
)
(
)
y
x
y
x
xy
xy
y
x
y
x
F
s
s
F
ν
ν
ν
ν
ν
ν
ν
ν
α
α
~
~
~
~
~
1
2/
1
2
2
2/
1
+
+
+
+
−
−
,
≦
≦
,
····················· (19)
(
)
(
)
56
56
~
56
56
1
975
.0
2
2
975
.0
,
≦
≦
,
F
s
s
F
xy
xy
············································ (20)
(
)
70
.1
56
56
975
.0
=
,
F
································································· (21)
70
.1
~
59
.0
2
2
≦
≦
xy
xy
s
s
····································································· (22)
以上の条件が満たされない場合は,帰無仮説は棄却される。
6.3.5
問d)
二つの異なったサンプルから求められた高さの標準偏差sh及びhs~が,同じ母集団に属しているという帰
無仮説
h
hσ
σ
~
=
は,次の条件が満たされれば棄却されない。
(
)
(
)
h
h
h
h
h
h
F
s
s
F
ν
ν
ν
ν
α
α
~
~
~
1
2/
1
2
2
2/
1
,
≦
≦
,
−
−
··········································· (23)
(
)
(
)
28
28
~
28
28
1
975
.0
2
2
975
.0
,
≦
≦
,
F
s
s
F
h
h
············································ (24)
(
)
13
.2
28
28
975
.0
=
,
F
································································· (25)
13
.2
~
47
.0
2
2
≦
≦
h
h
s
s
····································································· (26)
10
B 7912-8:2018
以上の条件が満たされない場合は,帰無仮説は棄却される(附属書B参照)。
6.4
合成標準不確かさの評価(タイプA及びタイプB)
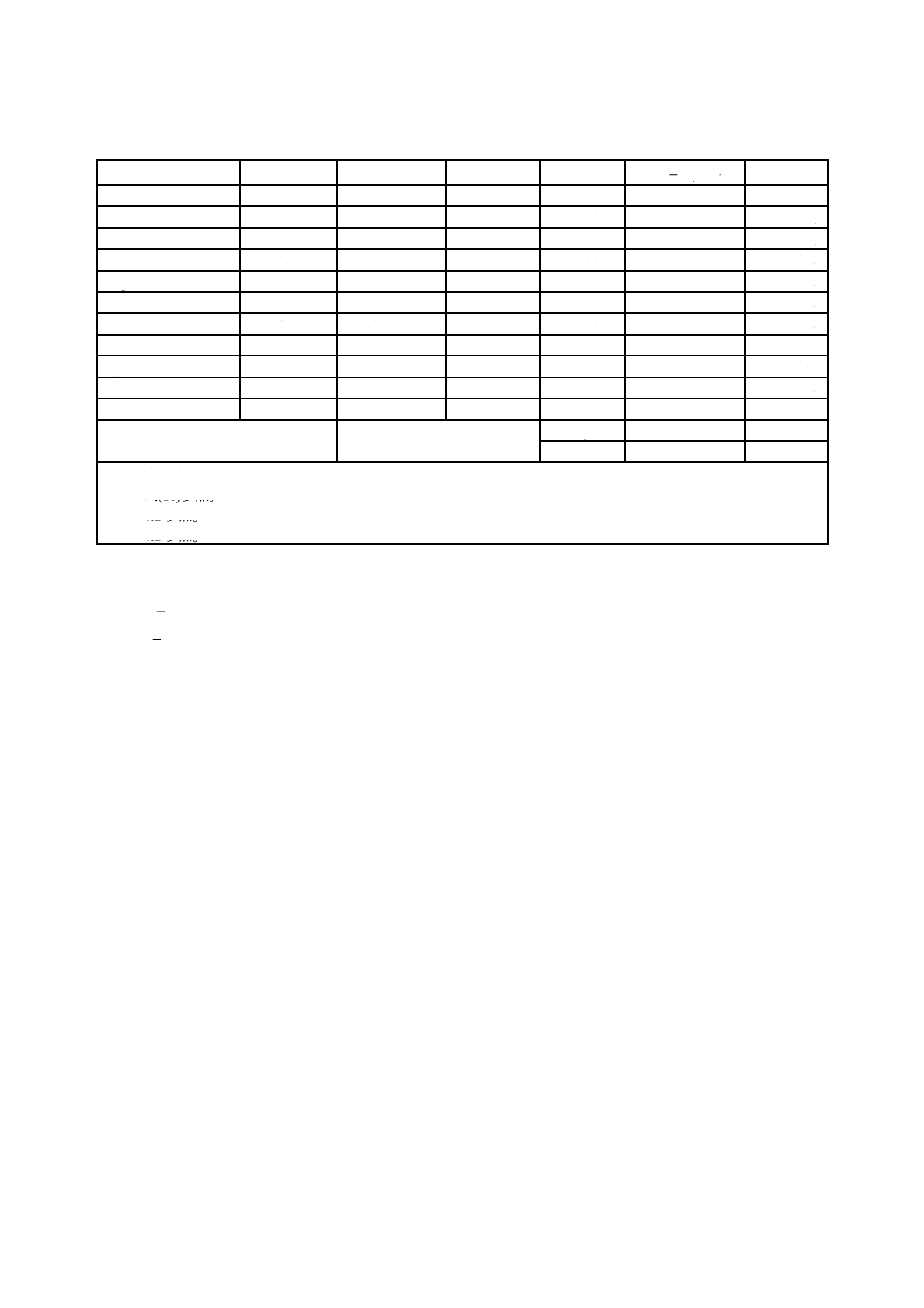
不確かさの要因(影響量)を不確かさバジェットとして表4に示す(表C.1参照)。
表4−GNSS(RTK)の影響量の代表例
不確かさ要因
記号
評価
分布
I. 測定結果に関する要因
水平位置の標準不確かさ
uJIS-GNSS RTK-xy
タイプA
正規分布
高さの標準不確かさ
uJIS-GNSS RTK-h
タイプA
正規分布
II. GNSS受信機関連の要因
気泡管の感度
ubub
タイプB
製造業者によって指定
表示の丸めによる不確かさ
udisp
タイプB
一様分布
III. 機器の設置に関する要因
致心
uc
タイプB
正規分布
アンテナ高の測定(4.2参照)
uha
タイプB
正規分布
三脚の高さの安定性(JIS B 7911)
uhs
タイプB
一様分布
アンテナ位相中心の補正量dx dy
udx udy
タイプB
正規分布
アンテナ位相中心の補正量dh
udh
タイプB
正規分布
マルチパス
ここでは考慮しない。
GNSS受信機又は衛星の時計
ここでは考慮しない。
衛星の軌道
ここでは考慮しない。
電離層遅延
ここでは考慮しない。
対流圏遅延
ここでは考慮しない。
IV. 数学的モデル要因
変換
utr
タイプA
正規分布
ジオイドの傾き
uge
タイプB
一様分布
水平位置の合成不確かさは,次の式となる。
(
)
[
]
2
tr
2
dy
2
dx
2
c
2
disp
2
bub
a
2
xy
-
RTK
GNSS
-
JIS
2
tan
u
u
u
u
u
u
h
u
uxy
+
+
+
+
+
+
=
··············· (27)
ここに,
ha は,アンテナ高である。
高さの合成不確かさは,次の式となる。
2
ge
2
dh
2
hs
2
ha
2
disp
2
h-
RTK
GNSS
-
JIS
u
u
u
u
u
u
uh
+
+
+
+
+
=
·································· (28)
拡張不確かさは,包含係数k=2を使用して,次の式となる(附属書C参照)。
xy
xy
u
U
×
=2
············································································ (29)
h
h
u
U
×
=2
············································································· (30)
11
B 7912-8:2018
附属書A
(参考)
簡易試験手順の例
A.1 測定
− 観測者:測量 太郎
− 天候:晴れ,+5 ℃
− 受信機名及びシリアル番号
:BBB 01234
− アンテナ名及びシリアル番号
:CCC 05678
− 日付:2006年1月21日
− 基線(基準値)水平距離D*:19.996 m 高低差Δh*:0.038 m “*”は基準値を表す。
− 標準偏差の既定値 σ0 xy=15 mm,σ0 h=25 mm
A.2 計算
表A.1に観測値の例,及び式(1)によって求めた水平距離,高低差及び偏差を示す。
表A.1−測定値及び偏差
測定
No.
セット
移動局
測点
測定値
m
水平距離
m
高低差
m
偏差
mm
j
k
x
y
h
Dj
Δhj
εD,i,j
εh,i,j
1
1
1
−67 637.433
−63 945.554
320.732
−
−
−
−
2
1
2
−67 654.082
−63 934.442
320.781
20.017
0.049
21
11
3
2
1
−67 637.448
−63 945.550
320.732
−
−
−
−
4
2
2
−67 654.084
−63 934.451
320.774
19.999
0.042
3
4
5
3
1
−67 637.450
−63 945.550
320.745
−
−
−
−
6
3
2
−67 654.083
−63 934.454
320.793
19.994
0.048
−2
10
7
4
1
−67 637.453
−63 945.541
320.731
−
−
−
−
8
4
2
−67 654.077
−63 934.447
320.783
19.986
0.052
−10
14
9
5
1
−67 637.450
−63 945.555
320.740
−
−
−
−
10
5
2
−67 654.083
−63 934.452
320.778
19.998
0.038
2
0
各偏差の制限値
mm
−
−
−
−
−
±53
±88
全ての偏差が式(2)の条件を満足するので,異常値はない。
12
B 7912-8:2018
附属書B
(参考)
標準試験手順の例
B.1
測定
− 観測者:測量 太郎
− 天候:晴れ,+5 ℃
− 受信機名及びシリアル番号
:BBB 01234
− アンテナ名及びシリアル番号
:CCC 05678
− 日付:2006年1月22日
− 基線(基準値):水平距離D*:19.994 m 高低差Δh*:0.028 m
− 標準偏差の既定値:σ0 xy=15 mm,σ0 h=25 mm
B.2
計算
B.2.1 測定値の確認
表B.1に観測値の例,及び式(1)によって求めた水平距離,高低差及び偏差を示す。
13
B 7912-8:2018
表B.1−測定値及び偏差
測定
No.
シリーズ セット 移動局
測点
測定値
m
水平距離
m
高低差
m
偏差
mm
i
j
k
x
y
h
Dj
Δhj
εD,i,j
εh,i,j
1
1
1
1
−67 635.470
−63 943.197
320.792
−
−
−
−
2
1
1
2
−67 652.389
−63 932.527
320.799
20.003
0.007
9
−21
3
1
2
1
−67 635.479
−63 943.188
320.788
−
−
−
−
4
1
2
2
−67 652.376
−63 932.525
320.824
19.980
0.036
−14
8
5
1
3
1
−67 635.480
−63 943.189
320.789
−
−
−
−
6
1
3
2
−67 652.387
−63 932.529
320.810
19.987
0.021
−7
−7
7
1
4
1
−67 635.476
−63 943.192
320.793
−
−
−
−
8
1
4
2
−67 652.393
−63 932.530
320.808
19.997
0.015
3
−13
9
1
5
1
−67 635.481
−63 943.192
320.794
−
−
−
−
10
1
5
2
−67 652.390
−63 932.522
320.803
19.994
0.009
0
−19
11
2
1
1
−67 635.478
−63 943.191
320.800
−
−
−
−
12
2
1
2
−67 652.399
−63 932.535
320.823
19.997
0.023
3
−5
13
2
2
1
−67 635.479
−63 943.193
320.798
−
−
−
−
14
2
2
2
−67 652.392
−63 932.528
320.828
19.995
0.030
1
2
15
2
3
1
−67 635.477
−63 943.194
320.780
−
−
−
−
16
2
3
2
−67 652.396
−63 932.530
320.797
19.999
0.017
5
−11
17
2
4
1
−67 635.475
−63 943.191
320.786
−
−
−
−
18
2
4
2
−67 652.395
−63 932.532
320.812
19.998
0.026
4
−2
19
2
5
1
−67 635.476
−63 943.191
320.784
−
−
−
−
20
2
5
2
−67 652.391
−63 932.534
320.812
19.992
0.028
−2
0
21
3
1
1
−67 635.479
−63 943.194
320.798
−
−
−
−
22
3
1
2
−67 652.391
−63 932.529
320.826
19.994
0.028
0
0
23
3
2
1
−67 635.478
−63 943.195
320.805
−
−
−
−
24
3
2
2
−67 652.398
−63 932.532
320.823
20.000
0.018
6
−10
25
3
3
1
−67 635.485
−63 943.199
320.799
−
−
−
−
26
3
3
2
−67 652.400
−63 932.534
320.813
19.996
0.014
2
−14
27
3
4
1
−67 635.474
−63 943.195
320.804
−
−
−
−
28
3
4
2
−67 652.394
−63 932.532
320.831
20.000
0.027
6
−1
29
3
5
1
−67 635.483
−63 943.200
320.793
−
−
−
−
30
3
5
2
−67 652.398
−63 932.537
320.833
19.995
0.040
1
12
偏差の制限値
mm
−
−
−
−
−
±53
±88
全ての偏差が式(2)の条件を満足するので,異常値はない。
14
B 7912-8:2018
B.2.2 統計量の計算
表B.2に測定値及び標準偏差計算の例を示す。
表B.2−測定値,残差及び標準偏差
測定
No.
シリーズ セット 移動局
測点
測定値
m
残差
mm
二乗残差
mm2
i
j
k
x
y
h
rx
ry
rh
rx2
ry2
rh2
1
1
1
1
−67 635.470 −63 943.197
320.792
8
−4
−2
64
16
4
2
1
1
2
−67 652.389 −63 932.527
320.799
4
3
−17
16
9
289
3
1
2
1
−67 635.479 −63 943.188
320.788
−1
5
−6
1
25
36
4
1
2
2
−67 652.376 −63 932.525
320.824
17
5
8
289
25
64
5
1
3
1
−67 635.480 −63 943.189
320.789
−2
4
−5
4
16
25
6
1
3
2
−67 652.387 −63 932.529
320.810
6
1
−6
36
1
36
7
1
4
1
−67 635.476 −63 943.192
320.793
2
1
−1
4
1
1
8
1
4
2
−67 652.393 −63 932.530
320.808
0
0
−8
0
0
64
9
1
5
1
−67 635.481 −63 943.192
320.794
−3
1
0
9
1
0
10
1
5
2
−67 652.390 −63 932.522
320.803
3
8
−13
9
64
169
11
2
1
1
−67 635.478 −63 943.191
320.800
0
2
6
0
4
36
12
2
1
2
−67 652.399 −63 932.535
320.823
−6
−4
7
36
16
49
13
2
2
1
−67 635.479 −63 943.193
320.798
−1
0
4
1
0
16
14
2
2
2
−67 652.392 −63 932.528
320.828
1
2
12
1
4
144
15
2
3
1
−67 635.477 −63 943.194
320.780
1
−1
−14
1
1
196
16
2
3
2
−67 652.396 −63 932.530
320.797
−3
0
−19
9
0
361
17
2
4
1
−67 635.475 −63 943.191
320.786
3
2
−8
9
4
64
18
2
4
2
−67 652.395 −63 932.532
320.812
−2
−2
−4
4
4
16
19
2
5
1
−67 635.476 −63 943.191
320.784
−2
−2
−10
4
4
100
20
2
5
2
−67 652.391 −63 932.534
320.812
2
−4
−4
4
16
16
21
3
1
1
−67 635.479 −63 943.194
320.798
−1
−1
4
1
1
16
22
3
1
2
−67 652.391 −63 932.529
320.826
2
1
10
4
1
100
23
3
2
1
−67 635.478 −63 943.195
320.805
0
−2
11
0
4
121
24
3
2
2
−67 652.398 −63 932.532
320.823
−5
−2
7
25
4
49
25
3
3
1
−67 635.485 −63 943.199
320.799
−7
−6
5
49
36
25
26
3
3
2
−67 652.400 −63 932.534
320.813
−7
−4
−3
49
16
9
27
3
4
1
−67 635.474 −63 943.195
320.804
4
−2
10
16
4
100
28
3
4
2
−67 652.394 −63 932.532
320.831
−1
−2
15
1
4
225
29
3
5
1
−67 635.483 −63 943.200
320.793
−5
−7
−1
25
49
1
30
3
5
2
−67 652.398 −63 932.537
320.833
−5
−7
17
25
49
289
各組の平均値
1
−67 635.478 −63 943.193
320.794
−
−
−
−
−
−
2
−67 652.393 −63 932.530
320.816
残差二乗和
−
−
−
−
−
−
696
379
2 621
標準偏差 s
mm
sx=4.99
sy=3.68
sh=9.68
−
−
−
−
−
−
x,y及びhに対する自由度は,式(6)によって求める:
(
)
(
)
28
2
1
5
3
1
=
×
−
×
=
×
−
×
=
=
=
p
n
m
h
y
x
ν
ν
ν
一測定のx,y及びhの標準偏差は,式(7)及び(8)によって求める:
15
B 7912-8:2018
mm
68
.9
28
621
2
28
mm
68
.3
28
379
28
mm
99
.4
28
696
28
2
2
2
2
2
2
=
=
=
=
=
=
=
=
=
=
=
=
∑
∑
∑
∑
∑
∑
h
h
h
h
y
y
y
y
x
x
x
x
r
r
s
r
r
s
r
r
s
ν
ν
ν
測点の水平位置及び高さの標準偏差は,式(8)によって求める:
mm
20
.6
68
.3
99
.4
2
2
2
2
xy
-
RTK
GNSS
-
JIS
=
+
=
+
=
=
y
x
xy
s
s
s
s
mm
68
.9
h
-
RTK
GNSS
-
JIS
=
=
hs
s
B.3
統計的検定
B.3.1 問a) に対する統計的検定
sxy=6.20 mm,σ0 xy=15.00 mm,ν=νx+νy=56
6.20≦15.00×1.15
6.20≦17.2
上の不等式は成立するので,信頼水準0.95で帰無仮説は棄却されない。
B.3.2 問b) に対する統計的検定
sh=9.68 mm,σ0 h=25.00 mm,ν=28
9.68≦25.00×1.22
9.68≦30.5
上の不等式は成立するので,信頼水準0.95で帰無仮説は棄却されない。
B.3.3 問c) に対する統計的検定
xy
s~=6.00 mmであった場合
sxy =6.20 mm,xy
s~=6.00 mm,ν=νx+νy=56
70
.1
00
.
36
44
.
38
59
.0
≦
≦
0.59≦1.07≦1.70
上の不等式は成立するので,信頼水準0.95で帰無仮説は棄却されない。
B.3.4 問d) に対する統計的検定
hs~=10.00 mmであった場合
sh =9.68 mm,hs~=10.00 mm,ν=28
13
.2
00
.
100
70
.
93
47
.0
≦
≦
0.47≦0.94≦2.13
上の不等式は成立するので,信頼水準0.95で帰無仮説は棄却されない。
16
B 7912-8:2018
附属書C
(参考)
不確かさバジェットの計算例(タイプA及びタイプB)
C.1 不確かさバジェット例
不確かさ要因
a) 測定結果に関する要因
標準不確かさuJIS-GNSS RTKは,式(9)及び(10)によって得る。
uJIS-GNSS RTK-xy=6.20 mm
uJIS-GNSS RTK-h=9.68 mm
b) 基盤の気泡管の標準不確かさububは,製造業者の仕様8' を適用することによって得る。
ubub=8'
c) 表示桁の丸めによる標準不確かさudisp
udispx=udispy=udisph=0.5 /3=0.29 mm
d) 致心の標準不確かさuc
uc=1 mm(4.2参照)
e) アンテナ高測定の標準不確かさuha
uha=1 mm(4.2参照)
f)
三脚の高さの安定性uhs
高さの安定性は,JIS B 7911によると0.05 mm以内と推定され,無視することができる。
g) アンテナ位相中心補正量の標準不確かさudx,udy,udhは,アンテナ位相特性モデルが相対的位相特性
で与えられる場合,一般的な値に基づき
udx=udy=1 mm
udh=2 mm
h) ジオイドの傾きの標準不確かさuge
ジオイドの傾きは,一般的に20'' 未満である。20 m基線におけるジオイド高の差は,1.94 mm以下
となる。
(
)
mm
56
.0
3
2
94
.1
ge
=
×
=
u
合成不確かさは,式(27)及び式(28)によって求まる。
mm
33
.7
1
1
1
29
.0
2
49
.3
20
.6
2
2
2
2
2
2
=
+
+
+
×
+
+
=
xy
u
mm
95
.9
56
.0
2
1
29
.0
68
.9
2
2
2
2
2
=
+
+
+
+
=
h
u
17
B 7912-8:2018
表C.1−不確かさバジェットの例
入力量
入力推定値
標準不確かさ
分布
感度係数
xi
i
xi
u
c
u
×
≡
評価
uxi
uxi
uJIS-GNSS RTK-xy a)
19.995
6.20 mm
正規分布
1
6.20
タイプA
uJIS-GNSS RTK-h b)
0.023
9.68 mm
正規分布
1
9.68
タイプA
ubub
0
8'
正規分布
1 500
3.49
タイプB
udisp
0
0.50 mm
一様分布
1
0.29
タイプB
uc c)
0
1 mm
正規分布
1
1
タイプB
uha d)
1.5
1 mm
正規分布
1
1
タイプB
udx
−
1 mm
正規分布
1
1
タイプB
udy
−
1 mm
正規分布
1
1
タイプB
udh
−
2 mm
正規分布
1
2
タイプB
uge
0
0.56 mm
一様分布
1
0.56
最終結果
uxy
7.33
uh
9.95
注a) 式(9)参照。
b) 式(10)参照。
c) 4.2参照。
d) 4.2参照。
拡張不確かさ
mm
15
33
.7
2
≈
×
=
xy
U
mm
20
55
.9
2
≈
×
=
h
U
18
B 7912-8:2018
参考文献
[1] JIS Z 9041-2:1999 データの統計的な解釈方法−第2部:平均と分散に関する検定方法と推定方法
[2] ISO 2854:1976,Statistical interpretation of data−Techniques of estimation and tests relating to means and
variances
[3] TS Z 0033:2012 測定における不確かさの表現のガイド
[4] TS Z 0032:2012 国際計量計測用語−基本及び一般概念並びに関連用語(VIM)
19
B 7912-8:2018
附属書JA
(参考)
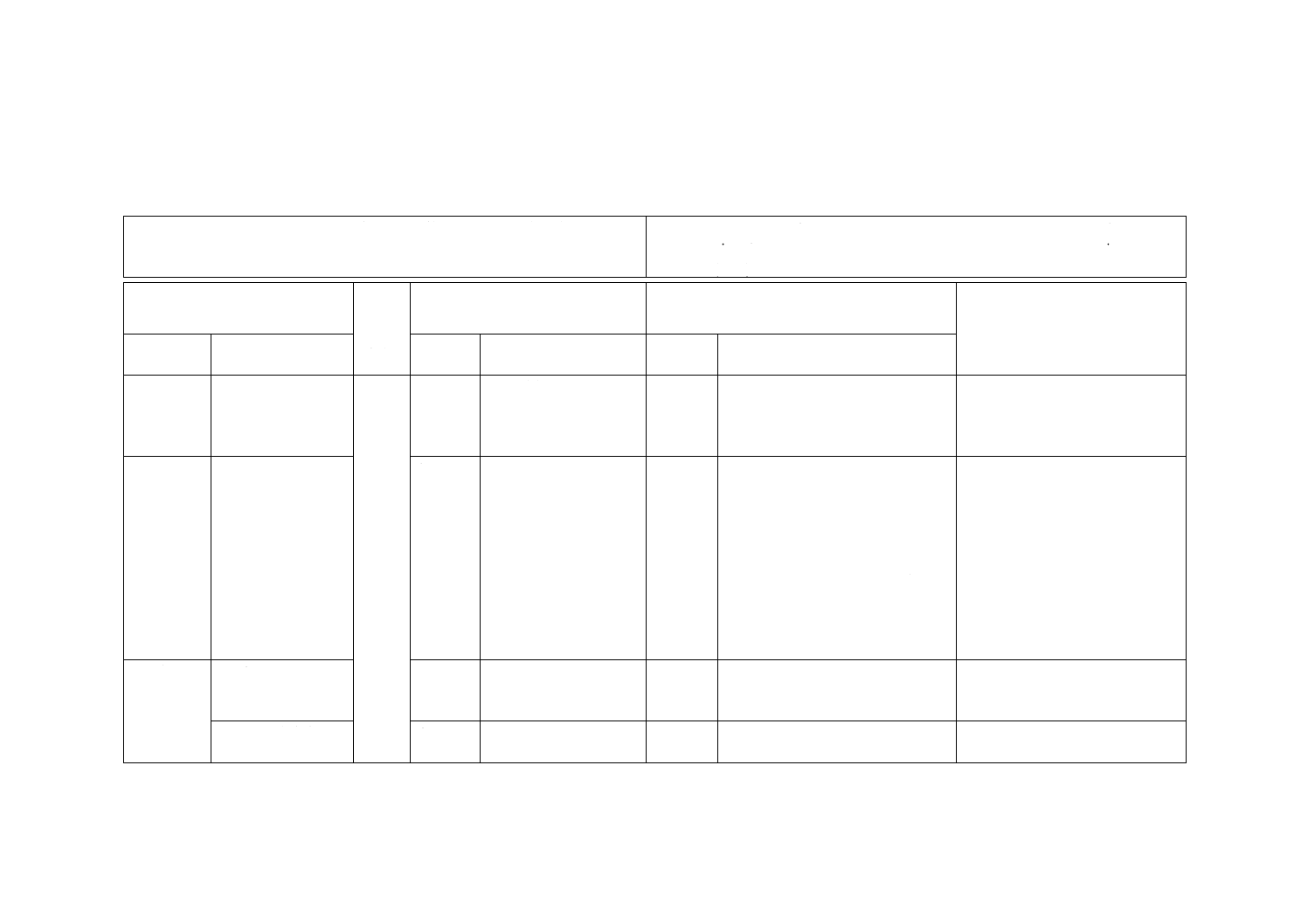
JISと対応国際規格との対比表
JIS B 7912-8:2018 測量機器の現場試験手順−第8部:GNSS(RTK)
ISO 17123-8:2015,Optics and optical instruments−Field procedures for testing geodetic
and surveying instruments−Part 8: GNSS field measurement systems in real-time
kinematic (RTK)
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲 RTKで使用する
GNSS機器の測量作
業への適応性を確
認する方法を規定
1
JISに同じ
一致
−
−
3 用語及び
定義
3
追加
JISでは,次の用語を追加した。
GNSS
RTK
固定局
移動局
ネットワークがた(型)RTK
アンテナ位相特性モデル
PDOP
整数値バイアス
周波数間バイアス,IFB
用語を引用した規格の違いによる
ものであり,技術的な差異はない。
GNSSに特有な用語の定義を加え
た。
4 一般
4.3 a) 簡易試験手順
4.4
ほぼJISに同じ
追加
機器の精度はISO 4463-1によるこ
とを追加した。
技術的差異はない。
手順を理解しやすくするため,箇
条番号の変更を行った。
4.3 b) 標準試験手順
4.5
JISに同じ
変更
−
手順を理解しやすくするため,箇
条番号の変更を行った。
3
B
7
9
1
2
-8
:
2
0
1
8
20
B 7912-8:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
5 簡易試験
手順
測定,計算
5
JISに同じ
変更
追加
あらかじめ与えられる規定の標準
偏差をsxy,shからσ0 xy,σ0 hへ変更。
標準偏差及び式(2)の係数2.5は,
ISO 4463-1によることを追記した。
計算に使用するあらかじめ与えら
れる標準偏差は,測定から得られ
た標準偏差“s”ではなく,“σ”で
あることが望ましい。
6 標準試験
手順
測定,計算,統計的
検定
6
JISに同じ
変更
変更
追加
統計的検定の帰無仮説及び対立仮
説の標準偏差を,sxy,shからσxy,σh
へ変更。
標準偏差の定義をsJIS-GNSSと明確に
した。また,高さの標準偏差を追加
した。
表2として,標準偏差計算表を追
加。以後の表番号を変更した。
統計的検定で規定値と比較する試
験機の標準偏差は,測定サンプル
から求められる“s”ではなく,そ
れをもたらした母集団の“σ”であ
ることが望ましい。
計算順序及び標準偏差の区別をよ
り分かりやすくするため。ISOへ
同じ追加及び変更を提案する。
附属書A
(参考)
簡易試験手順の例
Annex A
JISに同じ
変更
標準偏差の規定値をsxy,shから
σ0 xy,σ0 hへ変更。
計算に使用するあらかじめ与えら
れる標準偏差は,測定から得られ
た標準偏差“s”ではなく,“σ”で
あることが望ましい。
附属書B
(参考)
標準試験手順の例
Annex B
JISに同じ
変更
削除
標準偏差の規定値をsxy,shから
σ0 xy,σ0 hへ変更。
最後の2行を削除。
計算に使用するあらかじめ与えら
れる標準偏差は,測定から得られ
た標準偏差“s”ではなく,“σ”で
あることが望ましい。
誤解を生じる可能性があり,不必
要と判断した。
附属書C
(参考)
不確かさバジェッ
トの計算例
Annex C
削除
1.95を1.94へ変更,基準局と移動
局との表記を削除。
20″(6 mgon)の(6 mgon)を削除
丸めの誤りを訂正。
移動局間が正しいが20 mとの表
記があるので不要と判断した。
SI単位系と併用される角度との単
位は度分秒が推奨されているた
め。
3
B
7
9
1
2
-8
:
2
0
1
8
21
B 7912-8:2018
JISと国際規格との対応の程度の全体評価:ISO 17123-8:2015,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 一致 ················ 技術的差異がない。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
3
B
7
9
1
2
-8
:
2
0
1
8