B 7607:2018
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
3.1 一般 ···························································································································· 2
3.2 はかりの構造 ················································································································ 4
3.3 はかりの計量特性 ·········································································································· 8
3.4 表示及び誤差 ··············································································································· 11
3.5 影響及び標準条件 ········································································································· 13
3.6 試験 ··························································································································· 13
3.7 量記号及び略字 ············································································································ 14
4 計量要件························································································································ 15
4.1 精度等級 ····················································································································· 15
4.2 自動捕捉式はかりの分類 ································································································ 15
4.3 多目量はかりに対する追加要件 ······················································································· 16
4.4 補助表示装置 ··············································································································· 17
4.5 最大許容(平均)誤差及び最大許容標準偏差 ······································································ 17
4.6 影響因子試験に対する最大許容誤差·················································································· 19
4.7 計量単位 ····················································································································· 19
4.8 結果間の許容差 ············································································································ 19
4.9 影響因子 ····················································································································· 19
4.10 スパン安定性 ·············································································································· 21
4.11 試験目的のための表示及び印字(自動運転の場合) ··························································· 21
5 技術要件························································································································ 21
5.1 用途への適合 ··············································································································· 21
5.2 動作の安全保護 ············································································································ 21
5.3 計量結果の表示 ············································································································ 22
5.4 デジタル表示装置,印字装置及びデータ保存装置 ································································ 23
5.5 ゼロ点設定装置及びゼロトラッキング装置 ········································································· 24
5.6 風袋引き装置 ··············································································································· 25
5.7 プリセット風袋引き装置 ································································································ 26
5.8 複目量はかりの計量範囲の選択 ······················································································· 27
5.9 荷重受け部,荷重計量装置及び荷重伝達装置の選択装置又は切換装置 ····································· 27
5.10 質量ラベル貼付機又は計量値付け機 ················································································ 28
5.11 表記 ·························································································································· 28
B 7607:2018 目次
(2)
ページ
5.12 検定証印 ···················································································································· 30
6 電気式はかりの要件 ········································································································· 30
6.0A 一般 ························································································································· 30
6.1 一般要件 ····················································································································· 30
6.2 機能要件 ····················································································································· 30
7 試験方法························································································································ 31
7.1 自動運転 ····················································································································· 31
7.2 非自動(静的)運転 ······································································································ 33
7.3 自動補正装置の状態 ······································································································ 33
7.4 試験のための動作モード ································································································ 33
7.5 電気式はかりの試験 ······································································································ 35
8 検査······························································································································ 35
8.1 一般 ··························································································································· 35
8.2 型式検査 ····················································································································· 36
8.3 受渡検査 ····················································································································· 37
8.4 後続計量管理 ··············································································································· 38
附属書A(規定)自動捕捉式はかりの試験手順 ········································································· 39
附属書JA(規定)取引又は証明用の自動捕捉式はかりの要求事項 ················································ 64
附属書JB(規定)使用中検査 ································································································ 70
附属書JC(規定)検定に使用する器具 ···················································································· 73
附属書JD(規定)自動捕捉式はかりの修理 ·············································································· 74
附属書JE(参考)JISと対応国際規格との対比表 ······································································ 76
B 7607:2018
(3)
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本
工業規格である。これによって,JIS B 7607:2017は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
B 7607:2018
自動捕捉式はかり
Automatic catchweighing instruments
序文
この規格は,2006年に発行されたOIML R 51-1を基とし,技術的内容を変更して作成した日本工業規
格である。
この規格の本体,附属書JA〜附属書JDには,計量法の特定計量器として要求される要件のうち,構造
及び性能,検定公差,検定の方法,使用中検査,検定に使用する器具,修理などを規定しているが,この
規格の適用だけをもって計量法で定める検定に合格したことにはならない。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JEに示す。また,附属書JA〜附属書JDは対応国際規格には
ない事項である。
1
適用範囲
この規格は,個別の物体の質量又はばら状の物体の一塊の質量を計量する自動はかりのうち,自動重量
選別機,質量ラベル貼付機及び計量値付け機(以下,自動捕捉式はかりという。)に対する性能要件及び試
験方法について規定する。
この規格は,自動捕捉式はかりの計量性能及び技術性能を評価するための統一的な基準及び試験方法を
提供することを意図している。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
OIML R 51-1:2006,Automatic catchweighing instruments. Part 1: Metrological and technical
requirements−Tests(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 7611-2 非自動はかり−性能要件及び試験方法−第2部:取引又は証明用
JIS B 7612-1 質量計用ロードセル−第1部:アナログロードセル
JIS B 7612-2 質量計用ロードセル−第2部:デジタルロードセル
JIS C 60068-2-1 環境試験方法−電気・電子−第2-1部:低温(耐寒性)試験方法(試験記号:A)
JIS C 60068-2-2 環境試験方法−電気・電子−第2-2部:高温(耐熱性)試験方法(試験記号:B)
JIS C 60068-2-78 環境試験方法−電気・電子−第2-78部:高温高湿(定常)試験方法(試験記号:
2
B 7607:2018
Cab)
JIS C 60068-3-1 環境試験方法−電気・電子−第3-1部:低温(耐寒性)試験及び高温(耐熱性)試験
の支援文書及び指針
JIS C 60068-3-4 環境試験方法−電気・電子−第3-4部:高温高湿試験の指針
JIS C 61000-4-2 電磁両立性−第4-2部:試験及び測定技術−静電気放電イミュニティ試験
JIS C 61000-4-3 電磁両立性−第4-3部:試験及び測定技術−放射無線周波電磁界イミュニティ試験
JIS C 61000-4-4 電磁両立性−第4-4部:試験及び測定技術−電気的ファストトランジェント/バー
ストイミュニティ試験
JIS C 61000-4-5 電磁両立性−第4-5部:試験及び測定技術−サージイミュニティ試験
JIS C 61000-4-6 電磁両立性−第4-6部:試験及び測定技術−無線周波電磁界によって誘導する伝導
妨害に対するイミュニティ
JIS C 61000-4-11 電磁両立性−第4-11部:試験及び測定技術−電圧ディップ,短時間停電及び電圧
変動に対するイミュニティ試験
JIS Z 8103 計測用語
IEC 60654-2,Operating conditions for industrial-process measurement and control equipment. Part 2: Power
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS Z 8103によるほか,次による。
3.1
一般
3.1.1
はかり(weighing instrument)
物体に作用する重力を利用して,その物体の質量を計量するために使用する計量器。はかりは,質量に
関連するその他の量,大きさ,パラメータ又は特性を決定するためにも,使用されることがある。
その操作方法によって,はかりは,自動はかり又は非自動はかりに分類する。
3.1.2
自動はかり(automatic weighing instrument)
計量結果を得るために所定のプログラムに従って動作し,計量過程で操作者の介在を必要としないはか
り。
3.1.3
自動捕捉式はかり(automatic catchweighing instrument, catchweigher)
自動重量選別機,質量ラベル貼付機及び計量値付け機の総称。
3.1.3.1
自動重量選別機(checkweigher)
異なる質量の物体(例えば,包装商品)を,その質量と基準設定値との差に応じて複数のサブグループ
に分類する自動はかり。
注記 自動重量選別機は,オートチェッカ又はウェイトチェッカと呼ぶこともある。
3.1.3.2
質量ラベル貼付機(weigh labeler)
事前に寄せ集めた個別の物体(例えば,包装商品)の質量の計量値のラベルを貼り付ける自動はかり。
3
B 7607:2018
3.1.3.3
計量値付け機(weigh-price labeler)
事前に寄せ集めた個別の物体(例えば,計量値,単価及び料金付き包装商品)の表示質量及び単価を基
に料金を計算してラベルを貼り付ける自動はかり。
3.1.4
ばら状の物体(loose material)
計量過程中及び/又はその後で包装されない物質。この物質は,自動捕捉式はかりの荷重受け部又は別
の容器で計量するために集められる。
3.1.5
格付けはかり(grading instrument)
運賃又は料金を決定するため,計量結果の質量値を所定の範囲に割り付けるはかり。
3.1.6
電気式はかり(electronic instrument)
電子装置を組み込んだはかり。
3.1.7
管理はかり(control instrument)
試験荷重の取決めによる真の質量を計量するために使用するはかり。試験に使用する管理はかりは,次
のいずれかである。
− 個別型管理はかり 試験する自動捕捉式はかりとは別個のはかり。
− 一体型管理はかり 試験する自動捕捉式はかりであって,非自動(静的)運転モードが備わっている
もの。
3.1.8
取決めによる真の質量[conventional true value (of a quantity)]
特定の量に起因し,所定の目的に対して適切な不確かさをもつと協定によって認められている値。
3.1.9
計量当局(metrological authority)
(対応国際規格のこの用語は,この規格では適用しない。)
3.1.10
はかりの表示(indication of an instrument)
はかりが提供する量の値。“表示”には,“印字”も含む。
3.1.10.1
主表示(primary indications)
計量の要件に従った表示,信号又は記号。
3.1.10.2
副表示(secondary indications)
主表示以外の計量の表示,信号又は記号。
3.1.11
計量に関連する(metrologically relevant)
計量結果又は他の主表示に影響を与える連体修飾。
4
B 7607:2018
3.2
はかりの構造
注記 この規格で“装置”とは,例えば,機構,キー,ソフトウェアなどによって操作を開始するこ
とで,物理的に実現するかどうかにかかわらず,特定の機能を実行するあらゆる手段に対して
使われる。装置は,はかりの小さな部分及び重要な部分でもあり得る。
3.2.1
荷重受け部(load receptor)
荷重を受けるために設けたはかりの部分。
3.2.2
荷重伝達装置(load-transmitting device)
荷重受け部に作用している荷重によって生じる力を,荷重計量装置に伝達するはかりの部分。
3.2.3
荷重計量装置(load-measuring device)
荷重伝達装置から伝達する力を釣り合わせる平衡装置,及び表示装置又は印字装置によって質量を計量
するはかりの部分。
3.2.4
荷重コンベヤ(load-conveyor)
荷重を荷重受け部上に載せたり降ろしたりする装置。
3.2.5
荷重搬送システム(load-transport system)
荷重を荷重受け部上に搬送するシステム。
3.2.6
表示装置[displaying device (of a weighing instrument)]
計量結果を,視覚による様式で提供する装置。
3.2.7
モジュール(module)
特定の機能(単数又は複数)を実行し,関連規格に要求される特定の計量要件及び技術要件に従って,
個々に評価することができる識別可能な完成されたはかりの構成要素又はその集まり。
注記1 はかりのモジュールは,指定する部分的な誤差限度値の対象である。
注記2 はかりの代表的なモジュールには,ロードセル,指示計,アナログデータ処理装置又はデジ
タルデータ処理装置,計量部モジュール,コンピュータターミナル及びデジタルディスプレ
イがある。
3.2.7.1
ロードセル(load cell)
使用場所における重力加速度及び空気浮力の影響を考慮し,計量された量(質量)を他の計量された値
(出力)に変換することによって質量を計量する力変換器。
3.2.7.2
指示計(indicator)
ロードセル出力信号のデータ処理を行って,質量単位で計量結果を表示するはかりの電子装置。
注記 アナログ−デジタル変換器は,オプションで備えてもよい。
5
B 7607:2018
3.2.7.3
アナログデータ処理装置(analog data processing device)
ロードセル出力信号のアナログ−デジタル変換(A/D変換)を行い,更にそのデータを質量単位の計量
値として処理するはかりの電子装置。
注記 アナログデータ処理装置は,計量結果を表示せずにデジタルインタフェースを介してデジタル
様式で提供する。オプションで,そのはかりを操作するキー(マウス,タッチスクリーンなど)
を一つ以上備えてもよい。
3.2.7.4
デジタルデータ処理装置(digital data processing device)
質量単位の計量値として処理されたデータについて,更に風袋引き,料金計算などの処理を加えるはか
りの電子装置。
注記 デジタルデータ処理装置は,計量結果を表示せずにデジタルインタフェースを介してデジタル
様式で提供する。オプションで,そのはかりを操作するキー(マウス,タッチスクリーンなど)
を一つ以上,及び/又はアナログ−デジタル変換された計量値を質量の単位の計量値に処理す
る機能を備えてもよい。
3.2.7.5
計量部モジュール(weighing module)
計量結果を表示する手段を備えずに,荷重受け部,荷重伝達装置,ロードセル及びアナログデータ処理
装置から構成されるはかりのモジュール。オプションでデジタルデータ処理装置及びそのはかりの操作装
置を備えてもよい。
3.2.7.6
コンピュータターミナル(computer terminal)
はかりを操作するキー(マウス,タッチスクリーンなど)を一つ以上,及び計量部モジュール又はアナ
ログデータ処理装置のデジタルインタフェースを介して伝達された計量結果を表示するディスプレイをも
つデジタル装置。
3.2.7.7
デジタルディスプレイ(digital display)
指示計又はコンピュータターミナルのきょう(筺)体内に組み込まれるか,又は計量モジュールと組み
合わせて使用する別々のきょう(筺)体内のディスプレイ(すなわち,キーのない端末)。
3.2.7.8
ソフトウェア
3.2.7.8.1
計量関連パラメータ(legally relevant parameter)
はかり又は装置のパラメータ。計量関連ソフトウェアの種類,すなわち,型式特有のパラメータ又は装
置特有のパラメータに区別できる。
3.2.7.8.2
型式特有のパラメータ(type-specific parameter)
はかりの型式だけに依存する値をもつ,計量関連パラメータ。はかりの型式検査において固定される。
型式特有のパラメータには,質量の計算,安定性分析,料金計算,表示値の丸め処理,ソフトウェア識別
などがある。
6
B 7607:2018
3.2.7.8.3
装置特有のパラメータ(device-specific parameter)
個々のはかりに依存する値をもつ,計量関連パラメータ。校正パラメータ(例えば,スパンの調整,そ
の他の調整又は補正)及び仕様パラメータ(例えば,ひょう量,最小測定量,計量単位など)からなる。
これらは,はかりの特定動作状態においてだけ調整可能であって,選択可能である。保護しなければなら
ないもの(変更不可)と権限をもった者がアクセスできるもの(設定可能)とに分類できる。
3.2.7.8.4
ソフトウェア識別(software identification)
ソフトウェアと組み合わせて関連付けたソフトウェアの読取り可能な記号の列。
注記 例えば,バージョン番号及びチェックサムがある。
3.2.7.8.5
データ記憶装置(data storage device)
計量完了後,後で計量結果を使用するために計量データを保存するはかりの内部又は外部(取外し可能
な)の装置。
3.2.7.8.6
ソフトウェア分離(software separation)
計量に関連するソフトウェア及び計量に関連しないソフトウェアの明確な分離。ソフトウェアが明確に
分離されていない場合は,そのソフトウェア全体が計量に関連するソフトウェアであるとみなす。
3.2.8
電子部品
3.2.8.1
電子装置(electronic device)
電子サブアセンブリを用いた装置であって,特定の機能を果たす装置。電子装置は,通常,別々のユニ
ットとして製造され,個々に検査することができる。
注記 電子装置には,完成品はかり(例えば,対面販売用はかり),モジュール(例えば,指示計,ア
ナログデータ処理装置,計量部モジュールなど)又は周辺装置(例えば,プリンタ,副ディス
プレイなど)がある。
3.2.8.2
電子サブアセンブリ(electronic sub-assembly)
電子素子を使用し,かつ,識別可能な機能をもつ電子装置の一部。
注記 例えば,A/D変換器及びディスプレイがある。
3.2.8.3
電子素子(electronic component)
物質内の電子の伝導理論を利用した電子部品。
注記 例えば,電子管,トランジスタ及び集積回路(IC)がある。
3.2.9
(はかりの)表示装置[indicating device (of a weighing instrument)]
計量結果を質量単位で表示する計量部装置の一部。さらに,次の追加の表示をすることもある。
− 品物の質量と参照質量との差
− 多数の連続した計量値の平均及び/又は標準偏差
7
B 7607:2018
3.2.9.1
区別された目量を備えた表示装置(補助表示装置)(indicating device with a differentiated scale division)
デジタル表示装置で,小数点未満の桁の最後の数字が他の数字と明瞭に区別されている装置。
3.2.9.2
拡張表示装置(extended displaying device)
手動操作によって,検査目量(e)よりも小さい実目量(d)を一時的に表示する装置。
3.2.10 附属装置
3.2.10.1
基準値設定装置(setting device)
サブグループごとに質量限度値を設定するための装置。
3.2.10.2
基準設定値(nominal set point)
基準値設定装置によってプリセットした質量単位で表した値。
3.2.10.3
調整範囲(adjustment range)
動補正が作動できる計量範囲。
3.2.10.4
計数器(counter)
荷重受け部上に移動した荷重の数を計数する(移動計数)か,又はサブグループ個々の荷重の数を表示
する(区分計数)装置。
3.2.10.5
選別装置(sorting device)
荷重を別々のサブグループに自動的に分割する装置。
3.2.10.6
水平装置(leveling device)
はかりを基準水平位置に設定するための装置。
3.2.10.7
傾斜制御装置(tilt limiting device)
はかりが傾斜の規定値を超えて動作するのを防止する装置。
3.2.10.8
ゼロ点設定装置(zero-setting device)
被計量物が荷重受け部に載っていない状態において,表示をゼロに設定するための装置。
3.2.10.8.1
非自動ゼロ点設定装置(non-automatic zero-setting device)
操作者によって,表示をゼロに設定するための装置。
3.2.10.8.2
半自動ゼロ点設定装置(semi-automatic zero-setting device)
手動操作によって,自動的に表示をゼロに設定するための装置。
8
B 7607:2018
3.2.10.8.3
自動ゼロ点設定装置(automatic zero-setting device)
操作者の介在なしで,自動的に表示をゼロに設定するための装置。
3.2.10.8.4
初期ゼロ点設定装置(initial zero-setting device)
電源投入後,はかりを使用する前に自動的に表示をゼロに設定するための装置。
3.2.10.9
ゼロトラッキング装置(zero-tracking device)
ある限度内でゼロ点表示を自動的に維持するための装置。
3.2.10.10
風袋引き装置(tare device)
何らかの荷重が荷重受け部上にあるとき,表示をゼロに設定するための装置。風袋引き装置の方式には,
次のものがある。
− 加算式風袋引き装置 正味量に対する計量範囲は変わらない風袋引き装置。
− 減算式風袋引き装置 正味量に対する計量範囲が減少する風袋引き装置。
風袋引き装置の作動には,次のものがある。
− 非自動風袋引き装置 操作者によって荷重を釣り合わせる。
− 半自動風袋引き装置 単一の手動操作によって自動的に荷重が釣り合わされる。
− 自動風袋引き装置 人による操作なしで荷重が自動的に釣り合わされる。
3.2.10.10.1
風袋平衡装置(tare-balancing device)
はかりに風袋が負荷されたとき,風袋量の表示がない風袋引き装置。
3.2.10.10.2
風袋計量装置(tare-weighing device)
風袋量を記憶しておき,はかりに荷重が負荷されていなくても,その表示又は印字が可能な風袋引き装
置。
3.2.10.10.3
プリセット風袋引き装置(preset tare device)
総量又は正味量の値から,事前に設定されたプリセット風袋量を差し引いて計算結果を表示する装置。
正味量に対する計量範囲は,それに応じて減少する。
3.2.11
動補正(dynamic setting)
静的計量値と動的計量値との差を除去するための補正。
3.3
はかりの計量特性
3.3.1
計量能力
3.3.1.1
ひょう量[maximum capacity (Max)]
加算風袋量を考慮しないで計量することができる最大の量。
9
B 7607:2018
3.3.1.2
最小測定量[minimum capacity (Min)]
計量結果に過大な相対誤差を生じない荷重の最小の量。
3.3.1.3
計量範囲(weighing range)
最小測定量とひょう量との間の範囲。
3.3.1.4
最大風袋量,T+,T−(maximum tare effect)
加算式風袋引き装置又は減算式風袋引き装置の最大量。
3.3.2
計量結果
注記 3.3.2.1〜3.3.2.6の定義は,表示値が負荷前にゼロに設定されている場合にだけ適用される。
3.3.2.0A
計量値
計量器の表示する物象の状態の量の値。
3.3.2.1
総量,G,B(gross value)
風袋引き装置又はプリセット風袋引き装置が操作されていない場合に,はかりの荷重受け部にある荷重
の計量表示値。
3.3.2.2
正味量,NET,N(net value)
風袋引き装置を操作した後に,はかりの荷重受け部に載せた荷重の計量表示値。内容量ともいう。
3.3.2.3
風袋量,T(tare value)
風袋計量装置によって決定された荷重の計量値。
3.3.2.4
その他の計量値
3.3.2.4.1
プリセット風袋量,PT(preset tare value)
はかりに書き込まれた風袋量を表す数値又は計量値。1回又は複数回計量に使用する事前に決めた風袋
値。
注記1 “書き込まれた風袋量”には,キー入力,保存されたデータの呼出し又はインタフェース経
由の書込みを含む。
注記2 “事前に決めた”とは,風袋値を一度決定し,個別に風袋量を計量せずに他の計量に適用す
ることを意味する。
3.3.2.4.2
算出正味量(calculated net value)
計量値(総量又は正味量)とプリセット風袋量との差の値。
3.3.2.4.3
最終計量値(final weight value)
はかりの表示に影響を及ぼす妨害がなくなって,はかりが完全に静止して釣り合ったときの計量値。
10
B 7607:2018
3.3.2.5
安定平衡(stable equilibrium)
印字又は保存した計量値が,次のような状態にあること。
− 最終計量値から変動しない。
− 最終計量値からの変動が,隣接したいずれか1目量以内にある。
注記 “最終計量値からの変動が,隣接したいずれか1目量以内”とは,例えば,最終計量値が500 g
であって,1目量が1 gの場合に,はかりの表示が500 gから501 gに変動する,又は500 gか
ら499 gに変動するいずれかのことを示す。
3.3.2.6
最大許容誤差の変わる点(critical points)
最大許容誤差が変化する試験荷重値。
3.3.3
目盛区分
3.3.3.1
実目量,d(actual scale interval)
検査目量(e)より小さい量の表示。はかりの誤差又は計量値の決定に使用することができる。
3.3.3.2
検査目量,e(verification scale interval)
はかりの精度等級分類及び検査で使用される質量の単位で表される次の値。
− アナログ指示において,二つの連続した目盛標識に対応した値の差
− デジタル表示において,二つの連続した表示の差
注記 “検査目量”を単に“目量”という場合もある。
3.3.3.3
目量の数(単目量はかり)[number of verification scale intervals (single-interval instrument)]
ひょう量と検査目量との商。次の式で表す。
検査目量の数(n)=ひょう量(Max)/検査目量(e)
3.3.3.4
多目量はかり(multi-interval instrument)
その計量範囲が異なる目量をもった部分計量範囲に分割され,適用される荷重の増減に応じて自動的に
その部分計量範囲を決定するはかり。
3.3.3.5
複目量はかり(multiple range instrument)
同じ荷重受け部に対して,ひょう量と目量とが異なる複数の計量範囲をもつはかり。個々の計量範囲が
ゼロからひょう量まで有効である。
3.3.4
動作特性
3.3.4.1
動作速度(rate of operation)
単位時間当たり自動的に計量する荷重の数。例えば,荷重/分又はパック/分で表す。
3.3.4.2
起動時間(warm-up time)
電源投入後から初期の計量性能に適合して,計量が可能になるまでの時間。
11
B 7607:2018
3.3.4.3
非自動(静的)運転[non-automatic (static) operation]
試験のための静的計量モード。
3.3.4.4
自動運転(automatic operation)
はかりが操作者の介入なしに,事前に定められたプログラムによる自動プロセスに従って動作する計量
モード。自動運転を行うはかりは,その計量プロセスによって,静的計量はかり又は動的計量はかりのい
ずれかに分類する。
3.3.4.5
静的計量はかり(instrument that weighs statically)
質量計量プロセスの間,安定平衡に基づいた計量システムで動作するはかり。
3.3.4.6
動的計量はかり(instrument that weighs dynamically)
質量計量プロセスの間,安定平衡に基づかない計量システムで動作するはかり。
3.3.5
感度(sensitivity)
(対応国際規格のこの用語は,この規格では適用しない。)
3.3.6
繰返し性(repeatability)
一定とみなし得る試験条件の下で,同じ荷重を実用的に同じ方法で荷重受け部に数回載せた場合に,互
いに一致した計量結果をもたらすはかりの能力。
3.3.7
耐久性(durability)
使用期間中に性能特性を維持する,はかりの能力。
3.4
表示及び誤差
3.4.1
表示の方法
3.4.1.1
アナログ指示(analog indication)
計量値を連続的に示す目盛標識の集合であって,目量(e)及び実目量(d)の端数まで釣り合う位置の
評価ができる指示。
3.4.1.2
デジタル表示(digital indication)
計量値を一定間隔で断続的に表示する目盛標識の集合(最下位の桁の値を連続的に表示する場合も含
む。)であって,目盛標識が一連の整列した数字の連続で構成されていて,目量(e)及び実目量(d)の端
数の補間を許容しない表示。
3.4.2
読み
3.4.2.1
単純な並列による読み(reading by simple juxtaposition)
計算の必要なしに,計量結果を与える連続的な数字が単純に並んだ状態の計量結果の読み。
12
B 7607:2018
3.4.2.2
読みの総合的な不確かさ(overall inaccuracy of reading)
アナログ指示のはかりにおいて,同じ表示の標準偏差に等しい値。その読みは,通常使用条件の下で複
数の観測者によって実行される。結果については,10回以上の読みを実施することが通例である。
3.4.3
誤差
3.4.3.1
(表示の)誤差[error (of indication)]
計量値から質量の(取決めによる)真の値を引いた値。
3.4.3.2
デジタル表示の丸め誤差(rounding error of digital indication)
デジタル表示の結果と,はかりがアナログ指示でもたらす結果との差。
3.4.3.3
固有誤差(intrinsic error)
標準条件下でのはかりの誤差。
3.4.3.4
初期固有誤差(initial intrinsic error)
性能試験及びスパン安定試験の前に決定されたはかりの固有誤差。
3.4.3.5
平均(系統)誤差,x[mean (systematic) error]
荷重受け部を通過した荷重の連続した自動計量に対する(表示の)誤差の平均値。次の式で表される値。
n
x
x
n
i
i
∑
=
=
1
ここに,
x: 平均誤差
xi: 荷重表示の誤差
n: 計量回数(回)
i: 荷重が通過した回数(回)
3.4.3.6
誤差の標準偏差,s(standard deviation of the error)
荷重受け部を通過した荷重の連続した自動計量に対する(表示の)誤差の標準偏差。次の式で表される
値。
(
)
1
1
2
−
−
=∑
=
n
x
x
s
n
i
i
3.4.3.7
最大許容誤差,MPE(maximum permissible error)
はかりに対して,許容される誤差の限界値。
3.4.3.8
誤り(fault)
はかりの(表示の)誤差と固有誤差との差。
13
B 7607:2018
注記 基本的に誤りは,電気式はかりに存在するデータ又は電気式はかりを通過するデータの望まし
くない変化の結果である。
3.4.3.9
有意な誤り(significant fault)
検査目量(e)より大きな誤り。ただし,多目量はかりの場合,検査目量(e)の値は,部分計量範囲に
対して適用する。
次の誤りは,検査目量(e)を超えた場合でも有意な誤りとはみなさない。
− はかり又はチェック装置において,同時に起こり,かつ,互いに独立した原因から生じる誤り
− いかなる計量も不可能な誤り
− 計量結果に関与する全ての人が必然的に気付くほど重大な誤り
− 計量結果として,その表示が判断,記憶又は伝達することができないほど,瞬間的に変化する過渡的
な誤り
注記 “独立した原因から生じる誤り”とは,電気的な妨害に対する試験における電気的な影響以外
の明らかな原因[時間における影響(クリープなど),急激な温度変化における影響など]によ
って生じた誤りをいう。
3.4.3.10
スパン安定性(span stability)
使用期間中に,ひょう量とゼロ点表示との差の値を規定限度内に維持するはかりの性能。
3.5
影響及び標準条件
3.5.1
影響量(influence quantity)
計量の対象ではないが,計量結果に影響を与える量。
3.5.1.1
影響因子(influence factor)
規定する定格動作条件範囲内の影響量。
3.5.1.2
妨害(disturbance)
規定した限度内の値であるが,規定されたはかりの定格動作条件を超える影響量。
3.5.2
定格動作条件(rated operating conditions)
計量特性が最大許容誤差内に入るように意図した測定量及び影響量の範囲が与えられている使用条件。
3.5.3
標準条件(reference conditions)
計量結果の有効な相互比較を保証するために定められた影響因子の一連の規定値(温度,湿度,電源電
圧の範囲など)。
3.6
試験
3.6.1
動作試験(operational test)
試験荷重又は使用を意図する種類の荷重を用いて,荷重を荷重受け部に移動若しくは降ろす荷重コンベ
ヤ又は荷重搬送システムを使用して,完成はかりで行う試験。
14
B 7607:2018
3.6.2
シミュレーション試験(simulation test)
完成はかり又ははかりの一部に対して実施する試験であって,計量動作のあらゆる部分を模擬する試験。
3.6.3
性能試験(performance test)
試験器物(EUT)が所定の性能どおりに動作するかどうかを検証する試験。
3.6.4
スパン安定性試験(span stability test)
試験器物(EUT)が使用期間中にわたって,その性能特性を維持できることを検証する試験。
3.7
量記号及び略字
この規格で用いる量記号及び略字の意味を,次に示す。
量記号及び略字
意味
I
表示値
In
n番目の表示値
L
荷重
∆L
次の表示の切換点までの追加荷重
P
計量値(I+1/2 e−∆L=丸める前の指示)
E
誤差(I−L又はP−L)
E0
ゼロ点における誤差
d
実目量
e
検査目量
dT
プリセット風袋量の目量
n,ni
検査目量の数
pi
個別に試験するはかりのモジュールに適用するMPEの誤差配分
MPE
最大許容誤差
MPME
最大許容平均誤差
MPSD
最大許容標準偏差
EUT
試験器物
sf
有意な誤り
Max
自動捕捉式はかりのひょう量
Min
自動捕捉式はかりの最小測定量
Max1,Maxi,Maxr 自動捕捉式はかりのひょう量(指数)
Unom
自動捕捉式はかりに表記する公称電圧値
Umax
自動捕捉式はかりに表記する電圧範囲の最大値
Umin
自動捕捉式はかりに表記する電圧範囲の最小値
DC
直流
AC
交流
T
風袋量
T+
最大加算風袋量
T−
最大減算風袋量
15
B 7607:2018
G又はB
総量
N又はNET
正味量
PT
プリセット風袋量
e.m.f
起電力
4
計量要件
4.1
精度等級
自動捕捉式はかりをその用途によって,カテゴリX又はカテゴリYの精度等級に分類する。
カテゴリXは,自動重量選別機に適用する。
カテゴリYは,質量ラベル貼付機及び計量値付け機に適用する。
注記 自動捕捉式はかりをカテゴリX及びカテゴリYの両方に分類できる。例えば,自動捕捉式はか
りが自動重量選別機又は計量値付け機のいずれでも動作できる二つの別個の操作モードで構成
している場合などが該当する。
4.1.1
カテゴリX
カテゴリXを,更にXI,XII,XIII又はXIIIIの4種類の精度等級に分類し,製造業者が指定する等級指
定係数(x)で補完する。(x)の値は,1×10k,2×10k,又は5×10kで,ここでのkは,正若しくは負の整
数,又はゼロである。等級指定係数(x)で補完した精度等級は,例えば,XI(0.5)と表す。
4.1.2
カテゴリY
カテゴリYを,更にY(I),Y(II),Y(a)又はY(b)の4種類の精度等級に分類する。
4.2
自動捕捉式はかりの分類
4.2.1
検査目量
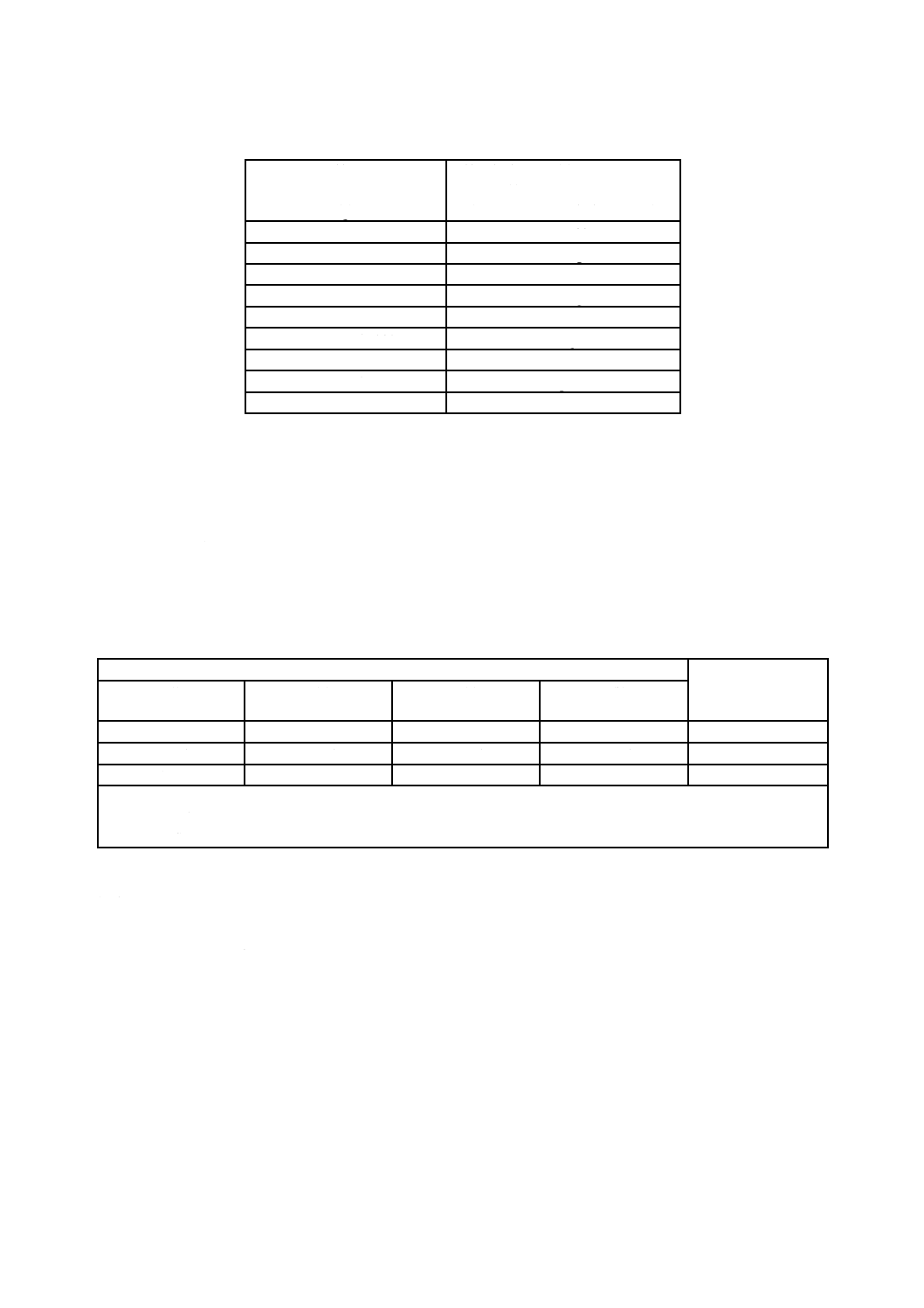
自動捕捉式はかりの精度等級による検査目量(e)及び検査目量の数は,表1による。
表1−精度等級の分類
精度等級
検査目量(e)
検査目量の数
n=Max/e
最小
最大
XI
Y(I)
0.001 g≦e a)
50000
−
XII
Y(II)
0.001 g≦e≦0.05 g
100
100 000
0.1 g≦e
5000
100 000
XIII
Y(a)
0.1 g≦e≦2 g
100
10 000
5 g≦e
500
10 000
XIIII
Y(b)
5 g≦e
100
1 000
注a) 検査目量(e)が1 mg未満の自動捕捉式はかりの型式検査及び受渡検
査は,分銅の不確かさによって行うことができない。
複目量はかりの検査目量は,“e1,e2 ... er”であって,“e1<e2<...<er”となる。同じように最小測定量(Min),
検査目量の数(n)及びひょう量(Max)も指数を付ける。
複目量はかりでは,個々の計量範囲は,基本的には一つの計量範囲をもつ自動捕捉式はかりとして扱う。
4.2.2
最小測定量
最小測定量は,製造業者が指定する。
カテゴリYに対して,最小測定量は,次の数値以上でなければならない。
16
B 7607:2018
精度等級Y(I): 100 e
精度等級Y(II): 20 e(0.001 g≦e≦0.05 g)
50 e(0.1 g≦e)
精度等級Y(a): 20 e
精度等級Y(b): 10 e
格付けはかり:
5 e
4.3
多目量はかりに対する追加要件
4.3.1
部分計量範囲
各々の部分計量範囲(変動指数i=1,2,…)は,次による。
− 検査目量
ei,ei+1>ei
− ひょう量
Maxi
− 最小測定量 Mini=Maxi−1(i=1に対する最小測定量は,Min1=Min)
各部分計量範囲に対する検査目量の数(ni)は,次の式による。
ni=Maxi/ei
4.3.2
精度等級
各部分計量範囲における検査目量(ei)及び検査目量の数(ni)は,自動捕捉式はかりの精度等級に従い
表1のとおりとする。最小測定量(Min1)は,自動捕捉式はかりの精度等級に従って4.2.2の計量要件に適
合しなければならない。
4.3.3
部分計量範囲のひょう量
最上位の部分計量範囲を除いた部分計量範囲のひょう量は,自動捕捉式はかりの精度等級に従って表2
の計量要件に適合しなければならない。
表2−部分計量範囲のひょう量
カテゴリX
XI
XII
XIII
XIIII
カテゴリY
Y(I)
Y(II)
Y(a)
Y(b)
Maxi/ei+1
50 000以上
5 000以上
500以上
50以上
4.3.4
風袋引き装置付き自動捕捉式はかり
多目量はかりの計量範囲に関する要件は,全ての可能な風袋量に対して,その正味量に適用する。
4.3.5
多目量はかりに対する例
ひょう量:Max=2/5/15 kg 精度等級Y(a)
検査目量:e=1/2/10 g
一つのひょう量(15 kg)及び一つの計量範囲(Min=20 g,Max=15 kg)をもつ自動捕捉式はかり
の部分計量範囲とは,例えば,次のとおりである。
Min1=20 g,Max1=2 kg,e1=l g,n1=2 000
Min2=2 kg,Max2=5 kg,e2=2 g,n2=2 500
Min3=5 kg,Max3=Max=15 kg,e3=10 g,n3=1 500
各荷重に対する最大許容誤差は,次のとおりである(4.5.1.2参照)。
m=400 g
=400 e1
MPE=±1.0 g
m=1 600 g
=1 600 e1
MPE=±1.5 g
m=2 100 g
=1 050 e2
MPE=±3.0 g
17
B 7607:2018
m=4 250 g
=2 125 e2
MPE=±4.0 g
m=5 100 g
=510 e3
MPE=±15.0 g
m=15 000 g
=1 500 e3
MPE=±15.0 g
ある影響因子による表示の変化が,いつも検査目量(e)の分数又は倍数に限定される場合,多目量はか
りでは,検査目量(e)は,載せた荷重に応じて採択する。特に,荷重がゼロ又はゼロ付近では検査目量(e)
は,最下位の部分計量範囲の検査目量(e1)となる。
4.4
補助表示装置
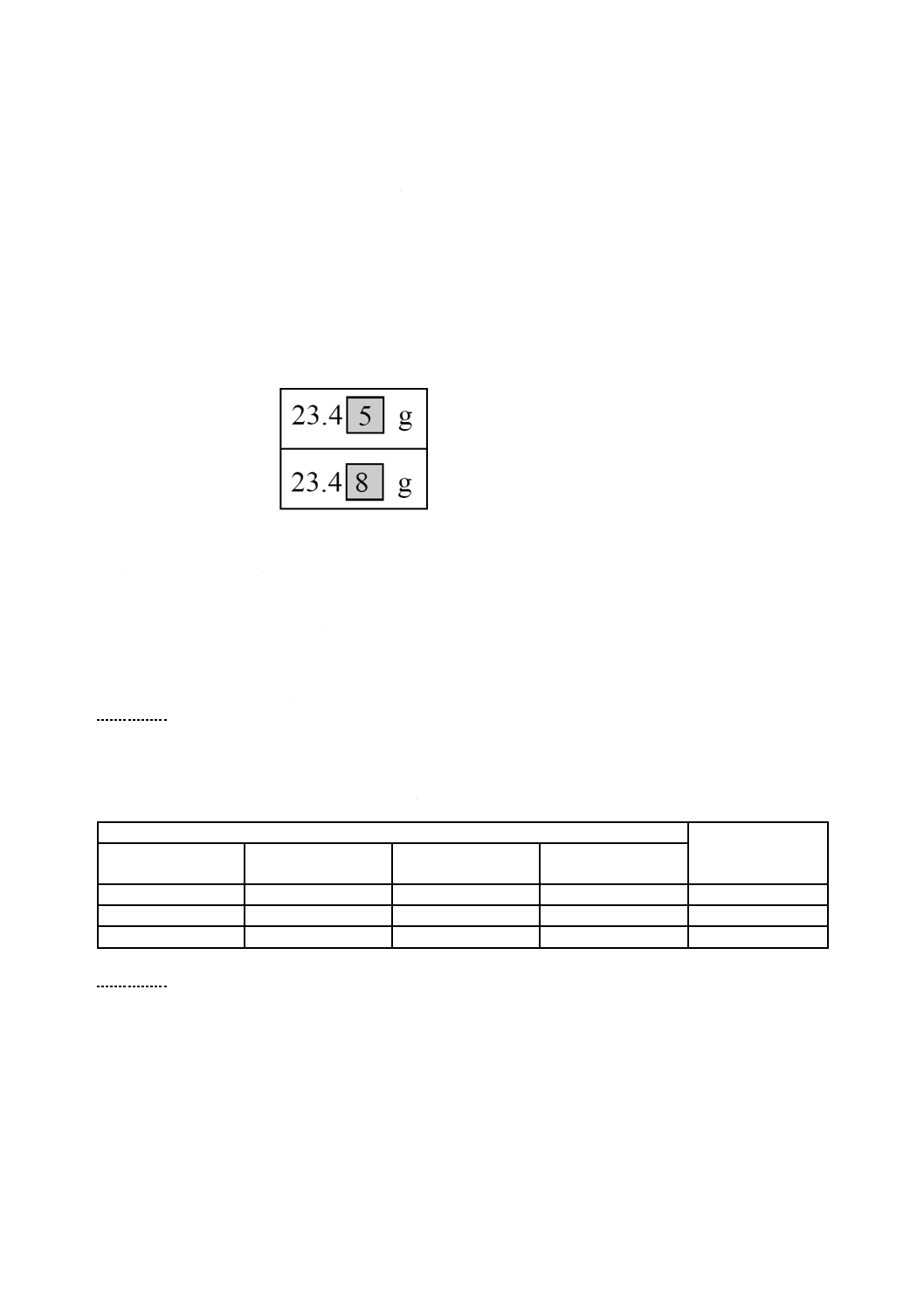
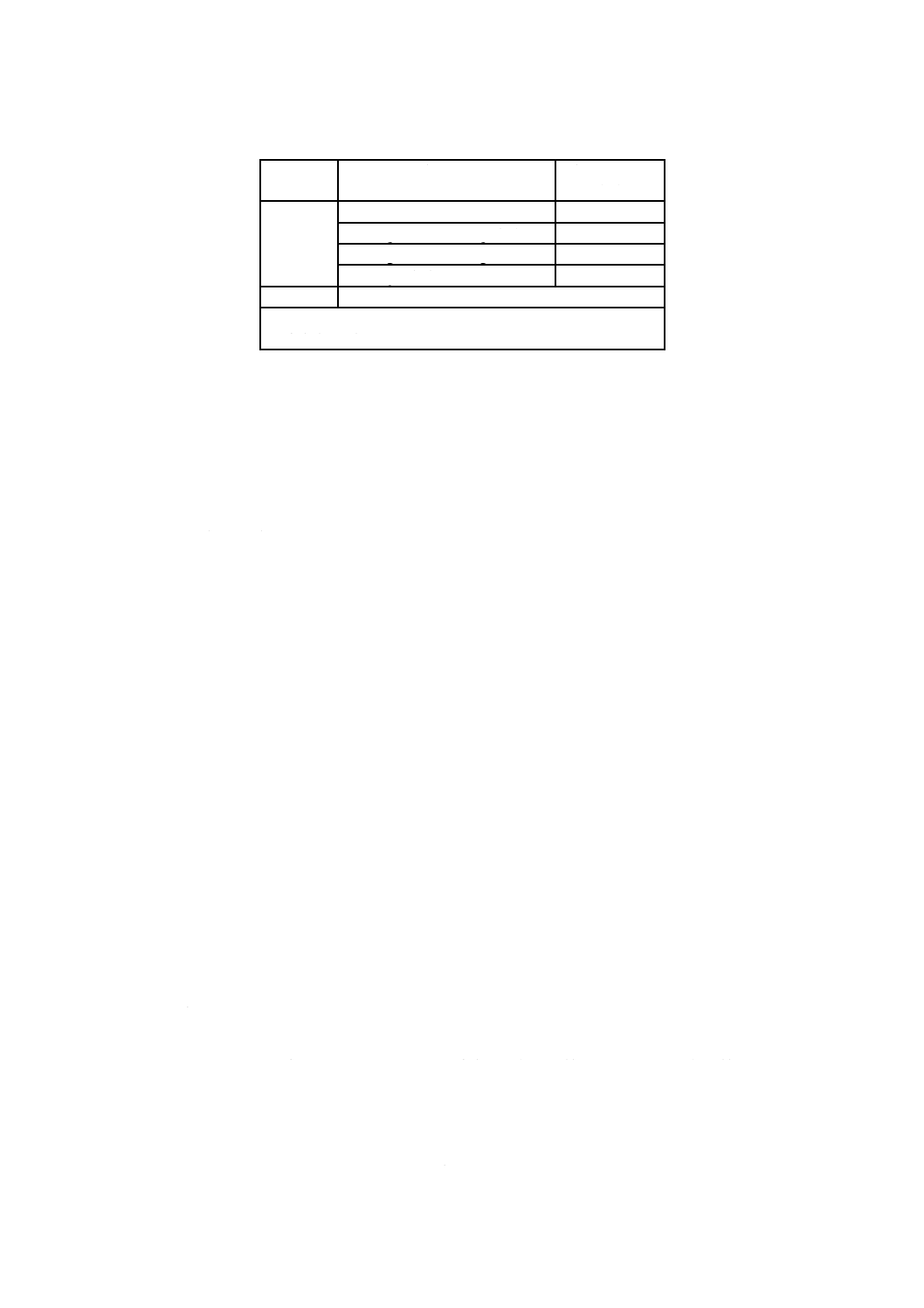
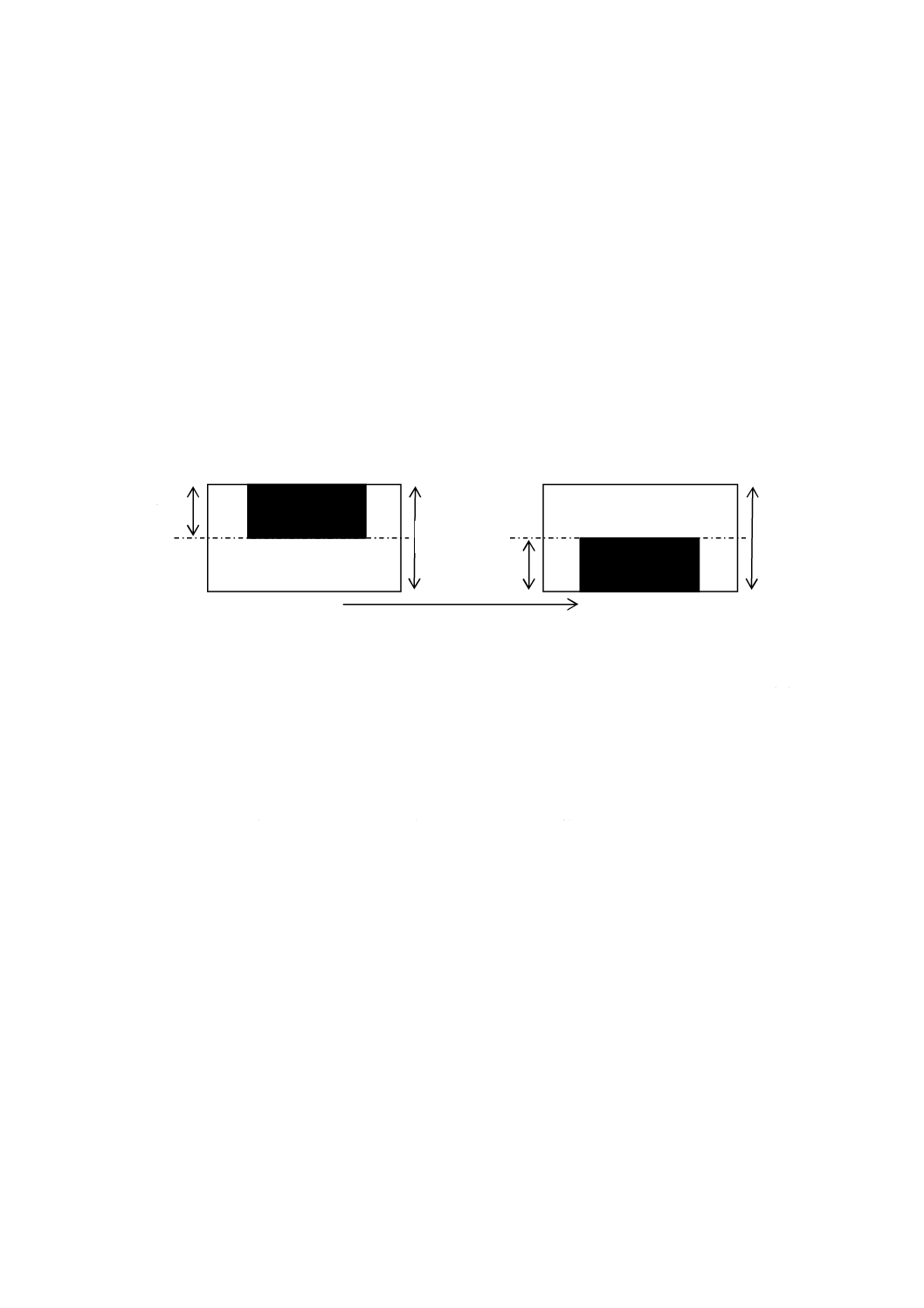
目盛表示が区別されている補助表示装置(図1参照)をもつ自動捕捉式はかりでは,補助表示装置は,
小数点の下位の桁においてだけ用いてもよい。
区分した最終桁の数字:5
実目量(d)=0.01 g又は0.05 g
検査目量(e)=0.1 g
区分した最終桁の数字:8
実目量(d)=0.01 g又は0.02 g
検査目量(e)=0.1 g
図1−補助表示装置の例
多目量はかりには,補助表示装置を取り付けてはならない。
注記 拡張表示装置(3.2.9.2及び5.4.2)は,補助表示装置とはみなされていない。
4.5
最大許容(平均)誤差及び最大許容標準偏差
4.5.1
自動運転
4.5.1.1
カテゴリXの自動捕捉式はかり
4.5.1.1.1
最大許容平均誤差
計量範囲内の質量の連続計量に対して,その最大許容平均(系統)誤差は,表3による。
使用中における最大許容平均誤差(使用公差)は,表JB.2による。
表3−カテゴリXの最大許容平均誤差
検査目量で表した質量(m)
カテゴリXの自動
捕捉式はかりの
最大許容平均誤差
XI
XII
XIII
XIIII
0≦m≦50000
0≦m≦5000
0≦m≦500
0≦m≦50
±0.5 e
50000<m≦200000
5000<m≦20000
500<m≦2000
50<m≦200
±1 e
200000<m
20000<m≦100000
2000<m≦10000
200<m≦1000
±1.5 e
4.5.1.1.2
最大許容標準偏差
誤差の最大許容標準偏差は,表4の値に精度等級の等級指定係数(x)を乗じた値とする。
使用中における最大許容標準偏差は,表JB.1による。
18
B 7607:2018
表4−最大許容標準偏差
質量
(g)
等級指定係数(x)=1に対する
最大許容標準偏差
(%はmに対する割合を表す。)
m≦50
0.48 %
50<m≦100
0.24 g
100<m≦200
0.24 %
200<m≦300
0.48 g
300<m≦500
0.16 %
500<m≦1 000
0.8 g
1000<m≦10 000
0.08 %
10000<m≦15 000
8 g
15000<m
0.053 %
精度等級に対する等級指定係数(x)は,次による。
− 精度等級XI及びXIIに対して,等級指定係数(x)は1未満とする。
− 精度等級XIIIに対して,等級指定係数(x)は1以下とする。
− 精度等級XIIIIに対して,等級指定係数(x)は1超えとする。
4.5.1.2
カテゴリYの自動捕捉式はかり
自動運転における計量範囲の質量に対する最大許容誤差は,表5による。
使用中における最大許容誤差(使用公差)は,表JB.3による。
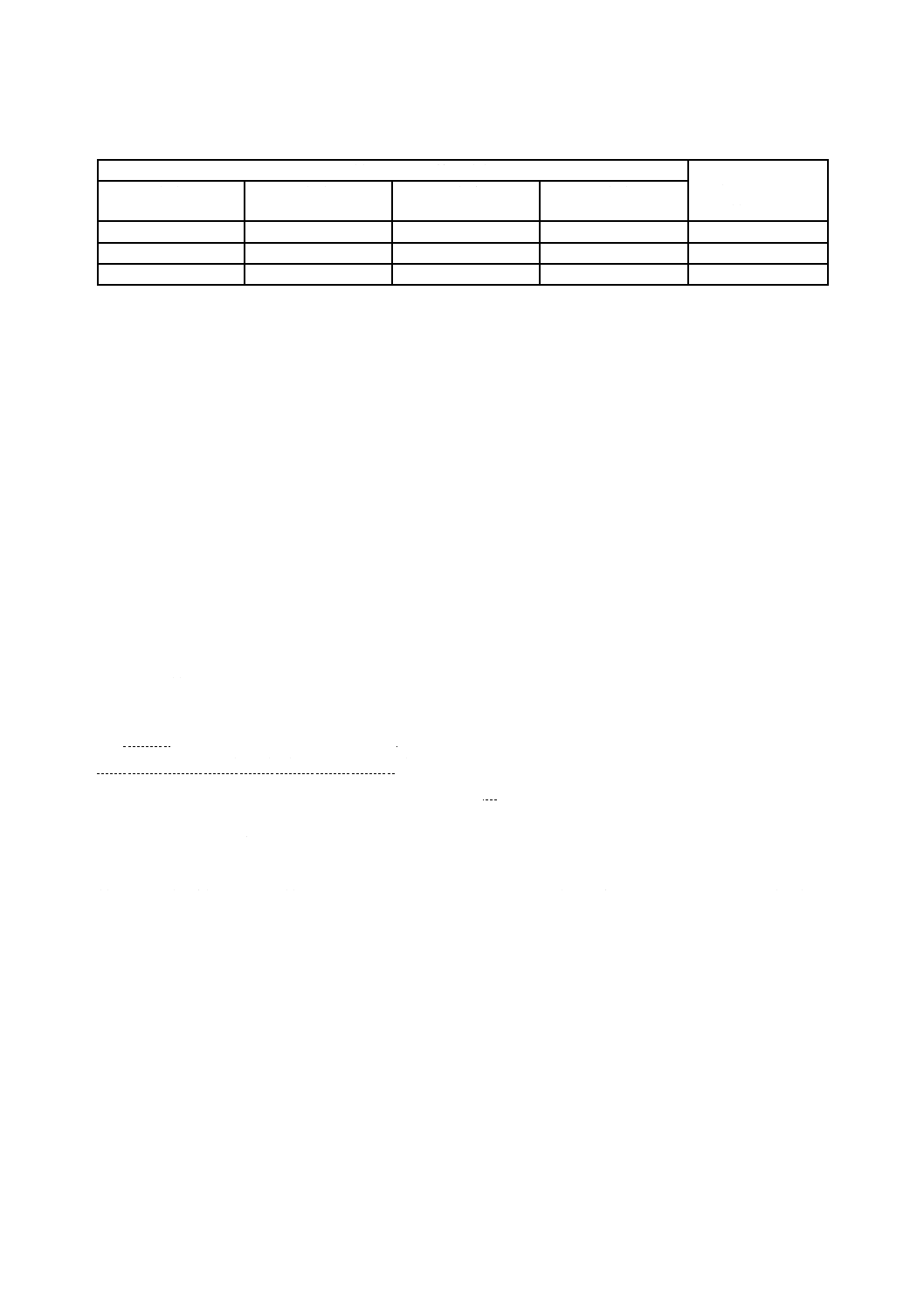
表5−カテゴリYの自動運転の最大許容誤差
検査目量(e)で表した質量(m)
カテゴリYの自動
捕捉式はかりの
最大許容誤差a)
Y(I)
Y(II)
Y(a)
Y(b)
0≦m≦50000
0≦m≦5000
0≦m≦500
0≦m≦50
±1 e
50000<m≦200000
5000<m≦20000
500<m≦2000
50<m≦200
±1.5 e
200000<m
20000<m≦100000
2000<m≦10000
200<m≦1000
±2 e
注a) 最大許容誤差を適用するに当たり,次の手順を適用する。
− d≦0.2 eのデジタル表示の自動捕捉式はかりは,A.1.9.2.1に規定する。
− d>0.2 eのデジタル表示の自動捕捉式はかりは,A.1.9.2.2に規定する。
質量を二つの個別の計量結果の差で算出する場合,次のいずれかの場合にだけ,この最大許容誤差を適
用する。
− 個別の計量結果が個々に印字又は記録されている場合,個々の計量結果に適用する。
− 正味量だけが印字されている場合,その正味量に適用する。
4.5.2
非自動(静的)運転
カテゴリX及びカテゴリYの自動捕捉式はかりに対して,非自動(静的)運転における計量範囲の質量
に対する最大許容誤差は,表6による。ただし,非自動(静的)運転に適用し,自動(静的)運転には適
用しない。
19
B 7607:2018
表6−非自動(静的)運転の最大許容誤差
検査目量(e)で表した質量(m)
カテゴリX及びY
の自動捕捉式はか
りの最大許容誤差
XI及びY(I)
XII及びY(II)
XIII及びY(a)
XIIII及びY(b)
0≦m≦50000
0≦m≦5000
0≦m≦500
0≦m≦50
±0.5 e
50000<m≦200000
5000<m≦20000
500<m≦2000
50<m≦200
±1 e
200000<m
20000<m≦100000
2000<m≦10000
200<m≦1000
±1.5 e
4.6
影響因子試験に対する最大許容誤差
4.6.1
カテゴリXの自動捕捉式はかり
自動運転に対しては,次のとおりとする。
− 最大許容平均誤差は,表3による。
− 誤差の最大許容標準偏差は,表4に規定した数値に等級指定係数(x)を乗じた値とする。
非自動(静的)運転における最大許容誤差は,表6による。
4.6.2
カテゴリYの自動捕捉式はかり
自動運転に対して,各荷重に対する最大許容誤差は,表5による。
非自動(静的)運転における最大許容誤差は,表6による。
4.7
計量単位
自動捕捉式はかりに使用する質量の単位は,次のいずれかとする。
− ミリグラム(mg)
− グラム(g)
− キログラム(kg)
− トン(t)
ただし,特殊な用途として次の計量単位を用いることができる。
− 宝石 カラット(ct)(1カラット=0.2 g)
− 真珠 もんめ(mom)(1もんめ=3.75 g)
− 金貨 トロイオンス(oz)(1トロイオンス=31.103 5 g)
4.8
結果間の許容差
4.8.1
偏置荷重の影響
自動捕捉式はかりに荷重を偏置して通過させることが可能な場合,どの偏置においても4.5に該当する
最大許容(平均)誤差及び最大許容標準偏差を超えてはならない(偏置試験については,7.4.4を参照)。
4.8.2
表示の一致
同一荷重に対して,同一の目量をもつ複数の装置による計量結果間の差は,次のとおりとする。
− デジタル表示及び印字装置においては,計量結果間の差はゼロとする。
− アナログ指示においては,自動運転の最大許容誤差の絶対値以下とする。
4.9
影響因子
4.9.1
温度
4.9.1.1
規定温度範囲
特定の使用温度範囲を表記していない自動捕捉式はかりは,−10 ℃〜+40 ℃の温度範囲内で計量特性
を維持しなければならない。
20
B 7607:2018
4.9.1.2
特別温度範囲
特定の使用温度範囲を自動捕捉式はかりに表記している場合は,その使用温度範囲内で,箇条4の計量
要件に適合しなければならない。
使用温度範囲は,自動捕捉式はかりの用途に従って選択してもよい。
使用温度範囲における最高温度と最低温度との差は,次の値以上でなければならない。
− 精度等級XI及び精度等級Y(I)の自動捕捉式はかり:5 ℃
− 精度等級XII及び精度等級Y(II)の自動捕捉式はかり:15 ℃
− その他の自動捕捉式はかり:30 ℃
4.9.1.3
ゼロ点表示の温度影響
ゼロ点又はゼロ点付近の表示は,精度等級XI及び精度等級Y(I)の自動捕捉式はかりでは1 ℃,その他
の自動捕捉式はかりでは5 ℃の周囲温度差に対して,検査目量(e)を超えて変化してはならない。
4.9.2
電源
自動捕捉式はかりの電源電圧が公称電圧(Unom)(自動捕捉式はかりに一つの電圧値だけを表記している
場合。)又は電源電圧範囲の上限値(Umax)及び下限値(Umin)から変動した場合,自動捕捉式はかりは,
箇条4の計量要件及び箇条5の技術要件に適合しなければならない。
試験電圧は,次のa)〜c)のいずれかによる。
a) 主電源(AC) 主電源(AC)は,次による。
− 下限は,0.85×Unom又は0.85×Uminとする。
− 上限は,1.10×Unom又は1.10×Umaxとする。
b) 主電源(DC) 主電源(DC)は,次による(自動捕捉式はかりの動作中に,電池の充電が可能な充電
式電池電源を含む。)。
− 下限は,最小動作電圧とする。
− 上限は,1.20×Unom又は1.20×Umax(Umaxは,製造業者が指定した新品の電池又は満充電した充電
池の電圧値)とする。
c) 非充電式電池電源(DC) 非充電式電池電源(DC)は,次による(自動捕捉式はかりの動作中に,電
池充電が不可能な充電式電池電源を含む。)。
− 下限は,最小動作電圧とする。
− 上限は,Unom又はUmaxとする。
注記1 主電源(DC)において,上限で安全装置が働く場合(例えば,シャットダウンなど)には,
動作できるところまでの電圧値で試験を行う。
注記2 最小動作電圧とは,自動捕捉式はかりが自動的に電源がオフとなる前の“最低動作が可能な
電圧”と定義する。
電池駆動及びDC主電源の自動捕捉式はかりでは,その電圧が製造業者が指定した最小動作電圧以下と
なった場合,継続して正しく機能するか,又は質量値を表示しないかのいずれかでなければならない。
4.9.3
傾斜
固定設置しない場合並びに水平装置及び水準器をもたない場合,自動捕捉式はかりは,(縦方向及び横方
向に)5 %傾斜したとき,箇条4の計量要件及び箇条5の技術要件に適合しなければならない。ただし,
傾斜制御装置を装備していて,製造業者が事前に決めた傾斜角度を5 %未満の傾斜とした場合は,“5 %”
を“製造業者が指定した傾斜角度”に置き換える。
自動捕捉式はかりに水準器が備わっている場合,自動捕捉式はかりが1 %傾斜したとき又は傾斜の限界
21
B 7607:2018
に達したとき,水準器上の標識(例えば,円目盛)によって,明確に表示しなければならない。水準器は,
自動捕捉式はかり上の,使用者にはっきり見え,傾斜をよく検知する部品を代表する場所にしっかり固定
しなければならない。
4.10 スパン安定性
自動捕捉式はかりがA.5で規定するスパン安定性試験の対象である場合,いかなる二つの測定から得ら
れた誤差の差の絶対値も,最大スパン誤差(ひょう量付近の荷重に対して,影響因子試験に対する最大許
容誤差の1/2の値)を超えてはならない。
4.11 試験目的のための表示及び印字(自動運転の場合)
カテゴリXの自動捕捉式はかりは,表3及び表4に適合していることを検証するために,7.1.8に従って,
平均誤差及び誤差の標準偏差を決定するための実用的な手段,例えば,質量(又は質量と基準設定値との
差)の表示及び/又は印字を備えていなければならない。
注記 通常の操作では,カテゴリXの選別装置は,型式検査及び受渡検査中,平均誤差又は誤差の標
準偏差を決定するために使用する検査目量(e)又はより小さい実目量(d)と連動する。
カテゴリYの自動捕捉式はかりは,表5に適合していることを検証するために,7.1.7.2に従って,個々
の計量誤差を決定するための実用的な手段を備えていなければならない。
5
技術要件
5.1
用途への適合
自動捕捉式はかりは,その運転方法及び意図する荷重に適用するように設計していなければならない。
その計量特性を維持するため,十分に堅ろう(牢)な構造でなければならない。
5.2
動作の安全保護
5.2.1
不正使用
自動捕捉式はかりは,不正使用を容易にするような特性をもっていてはならない。
5.2.2
偶発的な故障及び調整不良
自動捕捉式はかりは,適切な機能を乱すような制御部品の偶発的な故障又は調整不良が発生した場合に
は,明確に判断できるようにしなければならない。
5.2.3
動補正
自動捕捉式はかりには,動いている荷重の動的影響を補償する動補正装置を備えることができる。この
装置は,製造業者の指示に従ってその計量範囲で使用した場合は最大許容誤差及び最大許容標準偏差を超
えないことを条件に,設定質量に関係付けられた全計量範囲で動作させることができる。
動補正を行って最大許容誤差及び最大許容標準偏差を超えないある計量範囲を決めた場合,その範囲外
になる荷重に対しては,自動的に適切な措置がとられなければならない。これらの荷重に対しては,印字
もしてはならない。
使用者が利用できる動補正(5.2.6に従って封印されていない動補正)を備えた自動捕捉式はかりには,
その動補正の全ての調整を記録装置(例えば,イベントロガー)に自動的に,かつ,消去できないように
記録する。その記録したデータは,提示できなければならない。
5.2.4
制御装置
制御装置は,動作中に全ての表示を不可能とする場合を除き,停止位置が設計上定められている場合は,
その停止位置以外で運転が停止してはならない。操作キーは,明確に示されていなければならない。
22
B 7607:2018
5.2.5
車両搭載はかりの傾斜制御装置
(この規格では,適用しない。)
5.2.6
封印
アクセス又は調整が禁じられている構成部品,インタフェース,装置特有のパラメータ及びプリセット
制御(品種登録を除く。)は,保護する手段が備わっており,封印することが望ましい。精度等級XI及び
精度等級Y(I)の自動捕捉式はかりでは,スパン調整装置は,封印しなくてよい。
自動捕捉式はかりは,計量特性又は計量結果に影響する可能性のあるデータが侵入することを防止しな
ければならない(6.2.4参照)。
封印した制御器又は機能へのあらゆるアクセスが自動的に明確になる前提で,構成部品及びプリセット
制御器は,パスワード又は類似のソフトウェア手段によって封印してもよい。例えば,装置特有のパラメ
ータは,最後に受渡検査を実施したときの設定を5.11.4の要件に従って自動捕捉式はかり上に永続的に記
録した場合,その値を自動的に更新してもよい。
自動捕捉式はかりには,スパン調整装置を備えてもよい。スパン調整装置の封印後は,スパン調整装置
は外部から操作ができてはならない。
5.2.7
選別装置
カテゴリXの自動捕捉式はかりの選別装置は,荷重をその質量に基づいて別々のサブグループに自動的
に選別しなければならない。
5.2.8
重力加速度の補正
重力加速度の影響を受けるはかりは,補正用プログラムなどの重力加速度の変化の影響を補正する装置
をもってもよい。また,封印後の重力加速度の変化の影響を補正する装置は,外部から作用ができてはな
らない。
5.3
計量結果の表示
5.3.1
読取りの品質
主表示の読取りは,通常使用条件において,確実で,容易で,かつ,明瞭でなければならない。主表示
は,次による。
− アナログ指示の読みの総合的な不確かさは,検査目量(e)の1/5(0.2 e)を超えてはならない。
− 主表示を構成する数字,単位及び記号は,読取りの容易な大きさ及び形状並びに明確な表示でなけれ
ばならない。
目盛,数字付け及び印字は,単純な並列による読みが可能でなければならない。
5.3.2
表示の様式
計量結果には,質量を表す単位の名称又は記号を含んでいなければならない。
一つの計量結果の表示に使用する質量の単位は,一つだけとする。
計量結果を表す目量は,その結果を表す1×10k,2×10k又は5×10k単位の形式とする。指数kは,正若
しくは負の整数,又はゼロに等しい。
自動捕捉式はかりの全ての表示,印字及び風袋計量装置は,任意の一つの計量範囲において,任意の負
荷に対して同一の目量とする。
デジタル表示は,少なくとも右端の最初の数字を表示しなければならない。
小数は,小数点で整数とは区別し,小数点左側の一つ以上の数字と右側の全ての数字を表示する。
“0”は,小数点を付けずに右端に一つの“0”で表示してもよい。
質量の単位は,質量値が右側の桁に有効でない“0”を複数もたないように選ばなければならない。小数
23
B 7607:2018
点をもつ値では,有効ではない“0”は小数点以下3桁目だけに認められる。
質量の単位は,4.7に示したように小文字とする。
5.3.3
表示の限界
カテゴリYは,ひょう量に9 eを加えた値を超えて質量表示,印字,保存又は転送をしてはならない。
カテゴリXは,ひょう量に9 eを加えた値,又はひょう量に表4に規定する最大許容標準偏差の3倍を
加えた値のいずれか大きい方の値を超えて質量表示,印字,保存又は転送をしてはならない。
5.3.4
通常動作に対する質量表示又は印字
通常動作時,個々の品目の質量表示又は印字の目量は,検査目量(e)でなければならない。
多数の連続した荷重を自動計量する場合,平均(系統)誤差,及び誤差の標準偏差の表示又は印字の目
量は,検査目量(e)よりも高分解能とすることができる。
5.4
デジタル表示装置,印字装置及びデータ保存装置
5.4.0A 一般
デジタル表示装置,印字装置及びデータ保存装置について,次の5.4.1〜5.4.5の技術要件は,5.3.1〜5.3.4
に追加して適用しなければならない。
5.4.1
安定した釣合い
静的計量はかりについては,次の場合,釣合いが安定しているとみなす。
− 印字及び/又はデータの保存の場合,印字又は保存した計量値が,隣接した値であって,その値の一
つが最終計量値である。
− ゼロ点設定装置又は風袋引き装置の操作の場合,関連する精度要件内で5.4.3,5.5.3,5.5.4,5.5.5及び
5.6.7によって各装置の正しい作動ができる。
上記の条件は,安定平衡への連続的な又は一時的な妨害がある場合でも適用しなければならない。
動的に計量するはかりに対して,安定した釣合いに関する別の基準はない。
5.4.2
拡張表示装置
拡張表示装置は,補助表示装置をもつ自動捕捉式はかりには備えてはならない。
拡張表示装置をもつ自動捕捉式はかりでは,次のいずれかの場合の間だけ,検査目量(e)より小さな目
量の表示を可能とする。
− ある操作キーを押している間
− 手動操作の後の5秒以内
拡張表示装置の動作中は,いかなる場合でも印字は不可とする。
5.4.3
印字装置
印字は,意図する用途に対して,明瞭で消滅しないものでなければならない。印字する数字の高さは,2
mm以上とする。
印字する計量単位の名称又は記号は,数値の右か又は数値欄の上に表示する。
釣合いが安定していない場合は,印字は不可とする(5.4.1参照)。
5.4.4
データ保存装置
主表示は,後続使用(表示,印字,データ転送など)のために,自動捕捉式はかりの記録装置又は外部
記憶装置に保存してよい。この場合,保存したデータは,データの転送中及び/又は保存中における意図
的な又は偶発的な変更に対して適切に保護されなければならず,かつ,過去の計量を再現するのに必要な
全ての情報を含まなければならない。
釣合いが安定していない場合,主表示の保存は禁止とする(5.4.1参照)。
24
B 7607:2018
5.4.5
ソフトウェア
計量関連ソフトウェアを封印することが望ましい。その場合,ソフトウェアの変更が封印を壊さないと
不可能であるか,又はソフトウェアのどのような変更も識別コードを使って自動的に示されるような形で
自動捕捉式はかりに内蔵する。
計量関連ソフトウェアは,偶発的又は意図的な変更ができないように,十分に保護しなければならない。
計量関連ソフトウェアの変更,更新(アップロード),う(迂)回などの介入の証拠は,次回の受渡検査ま
で記録が残るようにしなければならない。
計量関連ソフトウェアには,ソフトウェア識別(3.2.7.8.4)が割り当てられなければならない。自動捕捉
式はかりの計量機能に影響を及ぼす可能性のある全てのソフトウェアの変更に,この固定のソフトウェア
識別が対応していなければならない。
5.5
ゼロ点設定装置及びゼロトラッキング装置
5.5.0A 一般
ゼロ点設定装置を一つ以上備えてもよい。ただし,ゼロトラッキング装置は,一つとする。ゼロ点設定
装置には,次のものを含む。
− 非自動ゼロ点設定装置
− 半自動ゼロ点設定装置
− 自動ゼロ点設定装置
5.5.1
最大効果
ゼロ点設定装置の影響で,自動捕捉式はかりのひょう量が変わってはならない。
ゼロ点設定装置及びゼロトラッキング装置の個々の装置の全体的効果は,ひょう量の4 %を超えてはな
らない。また,初期ゼロ点設定装置の全体的効果は,ひょう量の20 %を超えてはならない。
特定した範囲内で,この装置でゼロ点設定されたいかなる荷重に対しても,自動捕捉式はかりが,4.5
の最大許容(平均)誤差及び最大許容標準偏差,4.6の影響因子試験に対する最大許容誤差,4.8の結果間
の許容差及び4.9の影響因子に適合することが試験で示された場合,初期ゼロ点設定装置の全体的効果は,
より幅広い範囲が可能となる。
5.5.2
精度
ゼロ点設定後のゼロ点の偏差は,検査目量(e)の1/4(0.25 e)を超えてはならない。
5.5.3
ゼロ点設定装置の制御
初期ゼロ点設定装置の有無にかかわらず,同じキーで操作する半自動ゼロ点設定装置及び半自動風袋平
衡装置を備えてもよい。
ゼロ点設定装置及び風袋計量装置を備える場合のゼロ点設定装置の制御は,風袋計量装置の操作から分
離しなければならない。
半自動ゼロ点設定装置は,次の場合にだけ機能しなければならない。
− 自動捕捉式はかりが安定した釣合い状態(5.4.1)の場合
− 前に行った全ての風袋引き操作を取り消す場合
自動運転中,非自動ゼロ点設定装置又は半自動ゼロ点設定装置は,動作してはならない。
5.5.4
自動ゼロ点設定装置の安定性
自動ゼロ点設定装置は,全ての自動計量サイクルの一部として自動運転の開始時に,又はプログラム可
能な時間間隔後に動作させることができるものとする。この自動ゼロ点設定装置の動作説明(例えば,最
大プログラム可能時間間隔)は,検査報告書に記載することが望ましい。
25
B 7607:2018
自動ゼロ点設定装置は,次による。
− 自動捕捉式はかりが安定した釣合いの状態で作動する。
− ゼロ点誤差が±0.5 eを超えないように十分な頻度で作動する。
自動ゼロ点設定装置が自動計量サイクルの一部として動作する場合,この装置を動作不能にしたり,こ
の装置をある時間間隔で動作するよう設定してはならない。
自動ゼロ点設定装置があるプログラム可能な時間間隔で動作する場合,製造業者は,その最大時間間隔
を指定しなければならない。その最大プログラム可能時間間隔は,ゼロ点誤差が0.5 eよりも大きくないこ
とを確実にするために必要な値より大きくてはならない(A.3.5参照)。
自動ゼロ点設定装置は,風袋計量又はゼロトラッキング装置の作動後に,上記で要求した自動ゼロ点設
定装置に対する最大プログラム可能な時間間隔で再度作動することができる。
自動捕捉式はかりの現実の動作状態を考慮に入れて,自動ゼロ点設定に対する現実の最大プログラム可
能時間間隔を指定しなければならない。自動ゼロ点設定装置は,割り当てた時間後に自動的にゼロ点設定
するか,又は自動ゼロ点設定装置が作動するように自動捕捉式はかりを停止するか,若しくはゼロ点設定
の期限が切れたことに注意を促すための情報を発生しなければならない。
5.5.5
ゼロトラッキング装置
ゼロトラッキング装置は,次の場合にだけ作動することができるものとする。
− 表示値がゼロ又は風袋引き機能が働く前のゼロに等しい状態であって,正味量が負の符号(−)とと
もに表示されている場合
− 自動捕捉式はかりが安定した釣合いの状態の場合(5.4.1参照)
− ゼロ点の補正が1秒当たり検査目量(e)の1/2(0.5 e)を超えない場合
ゼロトラッキング装置は,風袋引き操作でゼロ点を表示しているときに,ひょう量の4 %以内で実際の
ゼロ点付近で作動することができる。
注記 ゼロトラッキング装置は,機能的に自動ゼロ点設定装置と類似している。
自動ゼロ点設定は,あらゆる自動計量サイクルの一部又はプログラム可能間隔時間後に作動
する。
ゼロトラッキング装置は,連続的に作動してもよいため,通常の計量動作との相互作用を防
止するため,最大補正速度(0.5 e/秒)以内で作動する。
5.6
風袋引き装置
5.6.1
目量
目量は,任意の荷重に対して,自動捕捉式はかりの目量と等しくなければならない。
5.6.2
精度
風袋引き後のゼロ点の偏差は,検査目量(e)の1/4(0.25 e)を超えてはならない。多目量はかりの場合
は,検査目量(e)を検査目量(e1)に置き換えなければならない。
5.6.3
作動範囲
風袋引き装置は,ゼロ点以下又は表示の限界を超えて作動するものであってはならない。
5.6.4
作動の可視性
風袋引き装置の作動は,目視できるように自動捕捉式はかりに表示しなければならない。デジタル表示
の自動捕捉式はかりの場合は,これは表示された正味量に“NET”又は“N”という記号で表示しなけれ
ばならない。該当する場合,風袋量は“T”という記号とともに表示する。
NETは,“NET”,“Net”又は“net”と表示してもよい。
26
B 7607:2018
風袋引き装置の動作中に,一時的に総量を表示する装置をもつ自動捕捉式はかりの場合,総量を表示し
ている間は,“NET”の記号は消えなければならない。
この規定は,同じキーで作動する半自動ゼロ点設定装置と半自動風袋平衡装置を備えた自動捕捉式はか
りには適用しない。
記号“NET”及び“T”は,他の適切な用語に置き換えてもよい。
5.6.5
減算式風袋引き装置
作動中に残りの計量範囲の値を知ることができない減算式風袋引き装置は,ひょう量を超える自動捕捉
式はかりの使用を防止するか,又はひょう量に達したことを示さなければならない。
5.6.6
複目量はかり
複目量はかりの風袋引き装置の作動は,自動捕捉式はかりに荷重を載せた状態でより大きい計量範囲へ
の切替えが可能である場合,大きい計量範囲でも有効でなければならない。
5.6.7
風袋引き装置の動作
半自動及び自動風袋引き装置は,自動捕捉式はかりが安定した釣合い状態(5.4.1)のときだけ作動しな
ければならない。
半自動及び自動風袋引き装置は,自動運転中は作動してはならない。
5.6.8
同一キーで作動するゼロ点設定装置及び風袋平衡装置
同じキーで作動するゼロ点設定装置及び風袋平衡装置は,ゼロ点の精度(5.5.2)及び該当する場合は風
袋引きの精度(5.6.2)を任意の荷重に対しても適用しなければならない。
5.6.9
連続的な風袋引き操作
風袋引き装置の繰返し作動は,許容する。
複数の風袋引き装置が同時に作動する場合の各風袋量は,表示又は印字するときに明確に示されなけれ
ばならない。
5.6.10 計量結果の印字
総量は,いかなる呼称も付さないで印字してよい。記号による呼称の場合は,“G”又は“B”だけを使
うことができる。
対応する総量又は風袋量を除いて,正味量だけを印字する場合には,いかなる呼称も付さないで印字し
てよい。呼称の記号は,“N”とする。これは半自動ゼロ点設定装置及び半自動風袋平衡装置を同じキーで
操作する場合にも適用する。
複目量はかり又は多目量はかりで計量した総量,正味量又は風袋量には,計量範囲又は部分計量範囲を
示す特別な表示を付けて印字する必要はない。
正味量を対応する総量及び/又は風袋量と一緒に印字する場合は,正味量及び風袋量は対応する記号
“N”若しくは“T”,又は個々の呼称で識別しなければならない。ただし,記号“G”,“B”,“N”及び“T”
は,他の適切な用語に置き換えてもよい。
異なる風袋引き装置で計量した正味量及び風袋量を別々に印字する場合には,それらは適切に識別でき
なければならない。
5.7
プリセット風袋引き装置
5.7.1
目量
カテゴリXの自動捕捉式はかりのプリセット風袋量の目量(dT)は,その自動捕捉式はかりの検査目量
(e)と等しいか,又はそれ以下としなければならない。
カテゴリYの自動捕捉式はかりのプリセット風袋量の目量(dT)は,その自動捕捉式はかりの実目量(d)
27
B 7607:2018
に等しいか,又は自動的に実目量(d)に丸める。
複目量はかりのプリセット風袋量は,ある計量範囲からより大きな目量をもつ計量範囲だけに送られて
もよいが,送り先のより大きな目量に丸める。多目量はかりのプリセット風袋量は,自動捕捉式はかりの
最小の検査目量(e1)で入力し,その最大プリセット風袋量は,最下位の部分計量範囲のひょう量(Max1)
を超えてはならない。表示又は印字された算出正味量は,同じ正味量に対する自動捕捉式はかりの目量に
丸める。
5.7.2
作動モード
プリセット風袋引き装置は,次の条件下で一つ以上の風袋引き装置と同時に作動してもよい。
− 連続風袋引きの動作(5.6.9)に適合する。
− プリセット風袋引き操作の後に作動した風袋引き装置のいずれかをまだ使用している限り,プリセッ
ト風袋引き操作の変更又は取消はできない。
プリセット風袋引き装置は,プリセット風袋量と計量した荷重とが,容器上のバーコード識別などによ
って,明確に識別できる場合だけ自動的に動作してもよい。
5.7.3
作動の表示
表示装置は,作動の可視性(5.6.4)を適用しなければならない。プリセット風袋量の値は,少なくとも
一時的に表示されなければならない。計量結果の印字(5.6.10)は,次の条件下で適用される。
− 算出正味量を印字する場合は,計量値付け機を除き,少なくともプリセット風袋量を同時に印字する。
− プリセット風袋量が,記号“PT”によって示される。ただし,記号“PT”は他の適切な用語に置き換
えることができる。
5.8
複目量はかりの計量範囲の選択
5.8.0A 一般
実際に動作中の計量範囲は,明瞭に表示しなければならない。
5.8.1
計量範囲の手動選択
計量範囲の手動選択は,次の場合には可能とする。
− 任意の荷重に対して,小さい計量範囲から大きい計量範囲へ切り替える場合
− 荷重受け部が無負荷時であって,表示が“0”又は負の正味量を表示しているときに,大きい計量範囲
から小さい計量範囲へ切り替える場合。この場合,風袋引きの作動は,自動的に取り消され,ゼロ点
は検査目量(e1)の±1/4(±0.25 e1)に自動的に設定されなければならない。
自動運転中は,計量範囲の手動選択を禁止する。
5.8.2
計量範囲の自動選択
計量範囲の自動選択は,次の場合には可能とする。
− 荷重が使用中の計量範囲の最大総量を超えたときに,使用中の小さい計量範囲から次の大きい計量範
囲へ切り替える場合
− 荷重受け部が無負荷時であって,表示が“0”又は負の正味量を表示しているときに,大きい計量範囲
から最小の計量範囲に切り替える場合。この場合,風袋引きの作動は,自動的に取り消され,ゼロ点
は検査目量(e1)の±1/4(±0.25 e1)に自動的に設定されなければならない。
5.9
荷重受け部,荷重計量装置及び荷重伝達装置の選択装置又は切換装置
5.9.1
無負荷での影響の補償
選択装置又は切換装置は,使用中の荷重受け部及び/又は荷重伝達装置の切り換えによるゼロ点のずれ
を補償しなければならない。
28
B 7607:2018
5.9.2
ゼロ点設定
荷重受け部と荷重計量装置との複数の組合せをもつ自動捕捉式はかりのゼロ点設定は,5.5によって,曖
昧さなしに可能でなければならない。
5.9.3
計量の不可能性
選択装置又は切換装置の作動中は,計量が可能であってはならない。
5.9.4
組合せの識別
使用する荷重受け部と荷重計量装置との組合せは,容易に識別できなければならない。
5.10 質量ラベル貼付機又は計量値付け機
質量ラベル貼付機又は計量値付け機は,計量値用に一つ以上の表示をもたなければならない。ただし,
その表示を,設定限界,単価,プリセット風袋量及び品名の管理のようなセットアップ目的で一時的に使
用してもよい。
自動運転中においても,単価及びプリセット風袋量の実際の値を確認できなければならない。
5.10.1 料金計算
料金計算は,自動捕捉式はかりに表示又は印字された質量値と単価との積によって計算し,料金の単位
に丸める。料金の演算装置及び表示装置は,自動捕捉式はかりの一部とみなす。
料金間隔,通貨記号及び表示又は印字場所は,取引に関する国内規定を適用する。
単価は,“円/100 g”又は“円/kg”とする。ただし,“円”は,その自動捕捉式はかりを使用する国の
通貨単位に置き換えてもよい。
5.10.2 合計
合計量が特別な用語又は記号で識別されている場合,質量値及び価格を一つ以上のチケット(伝票)又
はラベル(値札)上に合計してもよい。総計は,印刷された全ての値の代数和とする。
5.10.3 印字
自動捕捉式はかりによる料金計算取引を印字する場合は,計量値,単価及び料金の全てを印字しなけれ
ばならない。
データは,印字する前に自動捕捉式はかりの記憶装置に保存してもよい。同じデータは,ラベル(値札)
又はチケット(伝票)に2度印字してはならない。
最小測定量未満は,印字してはならない。
5.11 表記
5.11.0A 一般
自動捕捉式はかり及び関連モジュール(表示装置又は印字装置)には,5.11.1及び5.11.2の表記を記載
しなければならない。
5.11.1 一般的な表記事項
一般的な表記事項は,次のとおりである。
a) 製造業者名又は識別マーク
b) 輸入業者名又は識別マーク(該当する場合)
c) 器物番号及び型式記号表示
d) 最大動作速度(例えば,…荷重/分又はパック/分)(該当する場合)
e) 荷重搬送システムの最大速度(… m/s又はm/min)(該当する場合)
f)
電源電圧(V)
g) 電源周波数(Hz)
29
B 7607:2018
h) 空気圧又は油圧(kPa)(該当する場合)
i)
調整範囲(… g又は… %設定値)(動補正装置をもち,かつ,作動範囲を限定する場合)
j)
温度範囲(−10 ℃〜40 ℃でない場合)
k) ソフトウェア識別(該当する場合)
注記 d)の表記は,e)の荷重搬送システムの最大速度及び設定可能な製品の寸法などから推定され
る最大動作速度である場合がある。
5.11.2 記号で表示する表記事項
記号で表示する表記事項は,次のとおりである。
− 精度等級の表示,例えば,XI(0.5)又はY(a)
− 検査目量(e)
− 実目量(d)
− ひょう量(Max …)
− 最小測定量(Min …)
− 最大加算風袋量(T=+ …)
− 最大減算風袋量(T=− …)
5.11.3 補助表記
(この規格では,適用しない。)
5.11.4 表示の方法
表示は,消滅しない仕組みのもので,かつ,通常使用条件下で容易に読める大きさ,形状及び明瞭さで
なければならない。
表示は,国内の言語若しくは適切な形態,又は国際的に合意されていて公開されている記号若しくは図
記号でもよい。
表示は,自動捕捉式はかりの取外しができないように固定した銘板若しくはステッカ,又は自動捕捉式
はかり自体の取外しができない部品上の,はっきりと見える一つの場所に,集めて表示する。
自動捕捉式はかりから取り外したときに銘板又はステッカが壊れない場合は,適切な封印の方法を講じ
ることが望ましい。
破壊せずに取り外すことができない場合を除いて,銘板は封印が可能でなければならない。その代わり
に,恒久的な又は手動操作によるソフトウェア制御を用いて,表記事項を次のように同時にディスプレイ
上に表示してもよい。
− 表示:Max …,Min …,e,d≠eの場合は,d及びX(x)及び/又はY(y)を1か所以上に,ディスプレ
イ上又はディスプレイの近くのはっきり見える位置に常に表示しなければならない。自動捕捉式はか
りの電源が入っている限り,計量結果のディスプレイ上に,常に同時に又はお互い交互に表示する。
− その他の表記は,手動コマンドで表示する。
− 表記は,装置特有のパラメータとみなされ,5.2.6の封印を適用する。
ソフトウェア制御の表示装置を使用する場合,少なくとも次の表記をしなければならない。
− ひょう量,最小測定量及び実目量をディスプレイの近くに表示する。
− 製造業者名又は商標
− 型式
− 器物番号
− 供給電圧
30
B 7607:2018
− 周波数
− 空気圧又は油圧
5.12 検定証印
(この規格では,適用しない。)
6
電気式はかりの要件
6.0A 一般
電気式はかりは,他の全ての箇条の適用すべき要件に加えて,次の電気式はかりの要件にも適合しなけ
ればならない。
6.1
一般要件
6.1.1
定格動作条件
電気式はかりは,定格動作条件の下で最大許容誤差を超えないように,設計及び製造していなければな
らない。
6.1.2
影響因子
電気式はかりは,温度範囲の上限値及び相対湿度85 %において,計量要件(箇条4)及び技術要件(箇
条5)に適合しなければならない。ただし,検査目量(e)が1 g未満の場合,精度等級XI,精度等級Y(I),
精度等級XII及び精度等級Y(II)には適用しない。
6.1.3
妨害
電気式はかりが妨害を受けた場合,次のいずれかとなるように設計及び製造していなければならない。
a) 有意な誤りを起こさない。すなわち,妨害を受けているときの計量値表示と妨害を受けていないとき
の計量値表示(固有誤差)との差が1目量(1 e)を超えない。
b) 有意な誤りを検出し,対処する。ディスプレイ上の有意な誤りの表示は,そのディスプレイに表示す
る他のメッセージと紛らわしいものであってはならない。
注記 有意な誤り(1 e)を超えない誤りは,表示誤差の値にかかわらず認められる。
6.1.4
耐久性
自動捕捉式はかりの意図した用途によって,6.1.1〜6.1.3の要件に恒久的に適合しなければならない。
6.1.5
適合性評価
電気式はかりの型式は,附属書Aに規定した試験に適合する場合,6.1.1〜6.1.4の技術要件に適合してい
るとみなす。
6.1.6
適用
6.1.3の妨害に対する技術要件は,次のように個別に適用してもよい。
− 有意な誤りの個々の原因
− 電気式はかりの各部分
6.1.3のa)又はb)のいずれかを適用するかは,製造業者の選択による。
6.2
機能要件
6.2.1
表示器の表示試験
表示装置の故障が質量値の誤表示の原因になる場合,自動捕捉式はかりの電源ONで自動的に起動する
表示チェック機能をもっていなければならない。例えば,その表示チェック機能は,作動中及び非作動中
における全ての関連する表示記号を操作者が容易に確認できるほど十分長い間,示していなければならな
い。ただし,画面表示器,マトリクス表示器などのように故障が明白な非セグメント方式の表示装置には
31
B 7607:2018
適用しない。
6.2.2
有意な誤りへの対処
有意な誤りを検出したとき,電気式はかりを自動的に停止するか,又は目か耳で認識できる表示か警告
音を自動的に発しなければならない。この措置は,操作者が処置するか,又は誤りが消えるまで続ける。
6.2.3
起動時間
電気式はかりの起動中は,計量結果の表示及び転送をしてはならず,自動運転を不可とする。
6.2.4
インタフェース
電気式はかりは,周辺装置又は他のはかりと接続するためのインタフェースを備えていてもよい。ただ
し,インタフェースは,コンピュータなどの周辺装置,他の接続したはかり又はインタフェースに働く妨
害によって,電気式はかりの計量機能及びその測定データが許容できないほどに影響を及ぼされてはなら
ない。
インタフェースを介して実行又は起動される機能は,箇条5に規定する技術要件及び条件に適合しなけ
ればならない。
注記 “インタフェース”は,自動捕捉式はかりと周辺装置又は他のはかりとの間のデータのやり取
りにおける全ての機械的,電気的及びソフトウェア装置を含む。
自動捕捉式はかりは,インタフェースを介して,a)〜c)のことを行ってはならない。
a) 明確に定義されておらず,計量結果として誤認される可能性のあるデータを表示する。
b) 表示,処理又は保存された計量結果を改ざんする。
c) 自動捕捉式はかりを調整又は調整係数を変更する。
それを介してa)〜c)の機能が実行又は起動できないインタフェースは,封印しなくてもよい。他のイン
タフェースは,5.2.6によって封印することが望ましい。
この規格の要件を適用する周辺装置に接続することを意図したインタフェースは,周辺装置が要件に適
合できるように,主表示に関連したデータを転送しなければならない。
7
試験方法
7.1
自動運転
7.1.1
試験荷重
試験荷重は,次による。
− 最小測定量及びひょう量のそれぞれに近い荷重
− 最小測定量とひょう量との間の最大許容誤差が変わる点に近いが,その値を超えない2点。ただし,
最大許容誤差の変わる点が一つの場合は,任意の試験荷重を1点追加する。
注記 規定した最大動作速度を達成するために,上記の四つの試験荷重それぞれにおいて複数の荷重
が必要となる場合がある。
7.1.2
試験計量回数
カテゴリXの自動捕捉式はかりの平均誤差及び誤差の標準偏差,並びにカテゴリYの自動捕捉式はかり
の個々の誤差を決定するために,使用する試験荷重に対する試験計量回数は,表7による。
32
B 7607:2018
表7−試験荷重に対する試験計量回数
カテゴリ
試験荷重
m
試験計量回数
(回)
X
1 kg以下
60
1 kgを超え 10 kg以下
30
10 kgを超え 20 kg以下
20
20 kgを超えるもの
10
Y
どの荷重に対しても10回以上
特別な試験手順でない限り,カテゴリYの自動捕捉式はかり
の試験計量回数は,少なくとも10回とする。
7.1.3
試験荷重の種類
7.1.3.1
型式検査
次の条件の試験荷重を用いなければならない。
− 適切な寸法
− 変動のない質量
− 固体,非吸湿性,非静電気性及び非磁性の材料
− 金属間の接触を排除
7.1.3.2
受渡検査
試験荷重は,使用を意図した種類の品物とする。
7.1.4
試験条件
標準計量動作試験(A.3.1.1参照)においては,荷重搬送システムを最大速度に設定する。代替動作速度
試験(A.3.8参照)においては,オペレータによって動作速度の調整が可能な場合は,その作動範囲のほぼ
中間の速度にも設定する。速度が特定の製品に関連付けられている場合,その製品用のプリセット速度に
設定する。
所定荷重値において,個々の試験手順の始めにゼロ点を設定しなければならない。
7.1.5
管理はかり
7.1.5.0A 一般
各試験荷重の取決めによる真の値を決定するために管理はかり(7.1.5.1の適合品)を使用しなければな
らない。管理はかりは,個別のもの(個別型管理はかり)又は一体のもの(一体型管理はかり)のいずれ
かとする。
7.1.5.1
管理はかりの精度
管理はかりは,個別型か一体型によらず,カテゴリXの自動捕捉式はかりの場合は,表3の最大許容誤
差及び表4の最大許容標準偏差のいずれか小さい方の1/3未満の精度まで,カテゴリYの自動捕捉式はか
りの場合は,表5の最大許容誤差の1/3未満の精度まで,各試験荷重の取決めによる真の質量の決定を保
証しなければならない。
7.1.6
試験荷重の真の質量値
試験荷重の取決めによる真の質量値は,7.1.5.1に適合した個別型管理はかり又は一体型管理はかりを使
用して決定する。
7.1.7
個々の誤差
7.1.7.1
カテゴリX
計量の個々の誤差は,計量値(表示結果又は印字結果)と試験荷重の取決めによる真の質量値(7.1.6参
33
B 7607:2018
照)との差とする。表示結果又は印字結果を観測紙に記録する(7.1.8参照)。
7.1.7.2
カテゴリY
計量の個々の誤差は,計量値(表示結果又は印字結果)と試験荷重の取決めによる真の質量値(7.1.6参
照)との差とする。表示結果又は印字結果を観測紙に記録する。
試験中の丸め誤差の影響を排除するため,次のいずれかの方法を適用しなければならない。
− 実目量(d)は,0.2 e以下とする(A.1.9.2.1参照)。
− 試験荷重の質量は,A.1.9.2.2の手順に従って選択する。
注記 A.1.9.2.2の手順を用いる場合,個々の誤差を記録することは不可能なことがある。ただし,
その自動捕捉式はかりが表5の最大許容誤差以内にあるかどうかに留意すれば十分である。
7.1.8
カテゴリXの自動捕捉式はかりに対する表示された質量
カテゴリXの自動捕捉式はかりは,各試験における平均誤差及び誤差の標準偏差を算出するために,各
試験荷重の計量値を表示及び/又は印字するか,計量値と基準設定値間との差を表示及び/又は印字をし
なければならない。このため,実目量(d)は,表4に等級指定係数(x)を乗じて得られる最大許容標準
偏差よりも大きくてはならない。
これに代わって,表3及び表4に適合していることを証明するその他の実際的な手段を用いてもよい。
例えば,平均誤差及び誤差の標準偏差の計算を直接行うための適切な装置が試験対象の自動捕捉式はかり
の中にある場合,使用前に精度チェックを行えば,この装置を使ってもよい。この状況では,個々の質量
を記録することは必須ではない。使用した方法が試験する特定設計に依存するため,自動捕捉式はかりが
計算要件に適合していることを検証する特定の方法は規定されていない。ただし,使用するどの方法も正
しく誤差が7.1.7.1に規定するように計算されていること,3.4.3.5及び3.4.3.6に定義する正しい式が自動
捕捉式はかりでの計算に使用されていることを検証し,少なくとも何らかの荷重のチェックを含んでいな
ければならない。使用する方法の詳細は,検査報告書の適切な場所に記録しておく必要がある。
7.2
非自動(静的)運転
7.2.1
試験の標準器
試験に使用する分銅の誤差は,表6の最大許容誤差の1/3以下とする。
7.2.2
試験荷重の質量値
試験荷重は,附属書Aの個々の試験に対して規定する試験荷重を適用しなければならない。
7.2.3
試験計量回数
各試験荷重における試験計量回数は,1回とする。
7.2.4
質量表示
非自動(静的)運転に対して,自動捕捉式はかりは,次のいずれかを備えていなければならない。
− 非自動はかりのように,常時質量表示をするモード
− 計量サイクルを模擬することで,質量表示を更新し続けるモード
個別誤差を決定するために,実目量(d)は0.2 e以下でなければならず,そうでない場合はA.1.10.2[実
目量(d)が0.2 eを超える場合]の手順を使用する。
7.3
自動補正装置の状態
動補正及び自動ゼロ点設定装置の状態は,附属書Aの個々の試験に対して規定したとおりとする。
7.4
試験のための動作モード
7.4.1
スパン安定性試験(7.5.3参照)
スパン安定性試験では,自動捕捉式はかりを非自動(静的)運転で試験を行う。試験には,ひょう量付
34
B 7607:2018
近の1点の静的試験荷重を使う。
7.4.2
妨害試験
妨害試験に対しては,非自動(静的)運転で試験を行う。試験には,一つの小さな静的試験荷重を使っ
て行う。
7.4.3
起動時間試験
起動時間試験では,自動捕捉式はかりを非自動(静的)運転で試験を行う。試験には,ひょう量付近の
1点の静的試験荷重を使って行う。
7.4.4
偏置試験
自動運転で動的計量する自動捕捉式はかりに対しては,偏置試験を次のとおり行う。
ひょう量の1/3の試験荷重(該当する場合,最大加算風袋量を加える。)を使って,荷重搬送システムの
中心から片側の縁の間及び中心から反対側の縁の間の2か所で,同一荷重による自動運転を繰り返す
(A.3.7.1参照)。
自動運転で静的計量する自動捕捉式はかりに対しては,偏置荷重の影響は,固定停止状態の荷重搬送シ
ステムの中央及び4区分の各位置にひょう量の1/3の試験荷重(該当する場合,最大加算風袋量を加える。)
を負荷し,非自動(静的)運転で試験を行う(A.3.7.2参照)。
支持点数(n)が4点を超える荷重搬送システムをもつ自動捕捉式はかりは,各支持点にひょう量(該当
する場合,最大加算風袋量を加える。)をn−1で除した試験荷重を負荷する。
7.4.5
影響因子試験
7.4.5.0A 一般
影響因子試験に要求する動作モードは,次による。
ばら状の物体を計量するように設計した自動捕捉式はかりは,非自動(静的)運転で試験を行ってもよ
い。
20 kg以上の荷重における試験は,非自動(静的)運転で試験を行ってもよい。
動的計量はかりで寄せ集めた個別荷重を計量する場合,影響因子試験の動作モードは,附属書Aで個々
の試験に対して規定したとおりとする。
静的計量はかりで事前に寄せ集めた個別の物体を計量する場合,影響因子試験の動作モードは,附属書
Aで個々の試験に対して規定したとおりか,又は7.4.5.1に規定した手順としてもよい。
7.4.5.1
非自動(静的)運転試験の代替手法
影響因子試験中の自動運転への代替手法として,次の条件に適合する場合,非自動(静的)運転に静的
試験荷重を適用することができる。
− 自動捕捉式はかりが正常動作で静的に計量できる。
− 偶然誤差が正常動作では有意でないことを7.4.5.2の試験で実証する。
− 非自動(静的)運転で試験する場合,全ての影響因子を非自動(静的)運転で実施し,検査報告書に
記載する。
7.4.5.2
静的計量はかりに対する偶然誤差の決定
静的試験荷重を影響因子試験に使用するかどうかの決定は,型式検査の前に,次の試験を行って判断す
る。
最小測定量及びひょう量の試験荷重で,荷重搬送システムを最大動作速度に設定し,また,動作速度範
囲の約中間に設定して,通常の使用条件下において,7.1に規定した自動運転を行う。
試験荷重に対して,同一荷重を複数回計量した結果間の差が,表6に規定した試験荷重に対する自動捕
35
B 7607:2018
捉式はかりの最大許容誤差の絶対値よりも大きくないことを検証した場合,影響因子試験に静的試験荷重
を使用することができる。
7.5
電気式はかりの試験
7.5.0A 一般
電気式はかりの試験は,箇条4及び箇条5の要件と,特に箇条6の要件への適合を検証するために行う。
7.5.1
審査
(この規格では,適用しない。)
7.5.2
性能試験
電気式はかり又は電子装置は,正しく機能するかについて,必要に応じて附属書Aに規定する試験をし
なければならない。大きさ及び/又は構造がユニットとして試験を行うのに適さない場合を除き,機器全
体に対して試験を行う。試験が機器全体として行えない場合,計量結果に影響を与え得るシステムの全て
の電子的要素を含む,擬似自動捕捉式はかりとみなすことが可能である電子機器の試験を行う。他の機器
への電子インタフェースの使用に起因する感受性も,試験で模擬しなければならない。加えて,試験は自
動捕捉式はかりの機能が完全に動作する状態で行わなければならない。
7.5.3
スパン安定性試験
スパン安定性試験は,4.10に規定する要求事項への適合に対し,A.5に規定する試験を行う。
8
検査
8.1
一般
自動捕捉式はかりの検査は,次の検査によって構成しなければならない。
− 型式検査
− 受渡検査
また,検査に必要な試験の項目は,表8による。
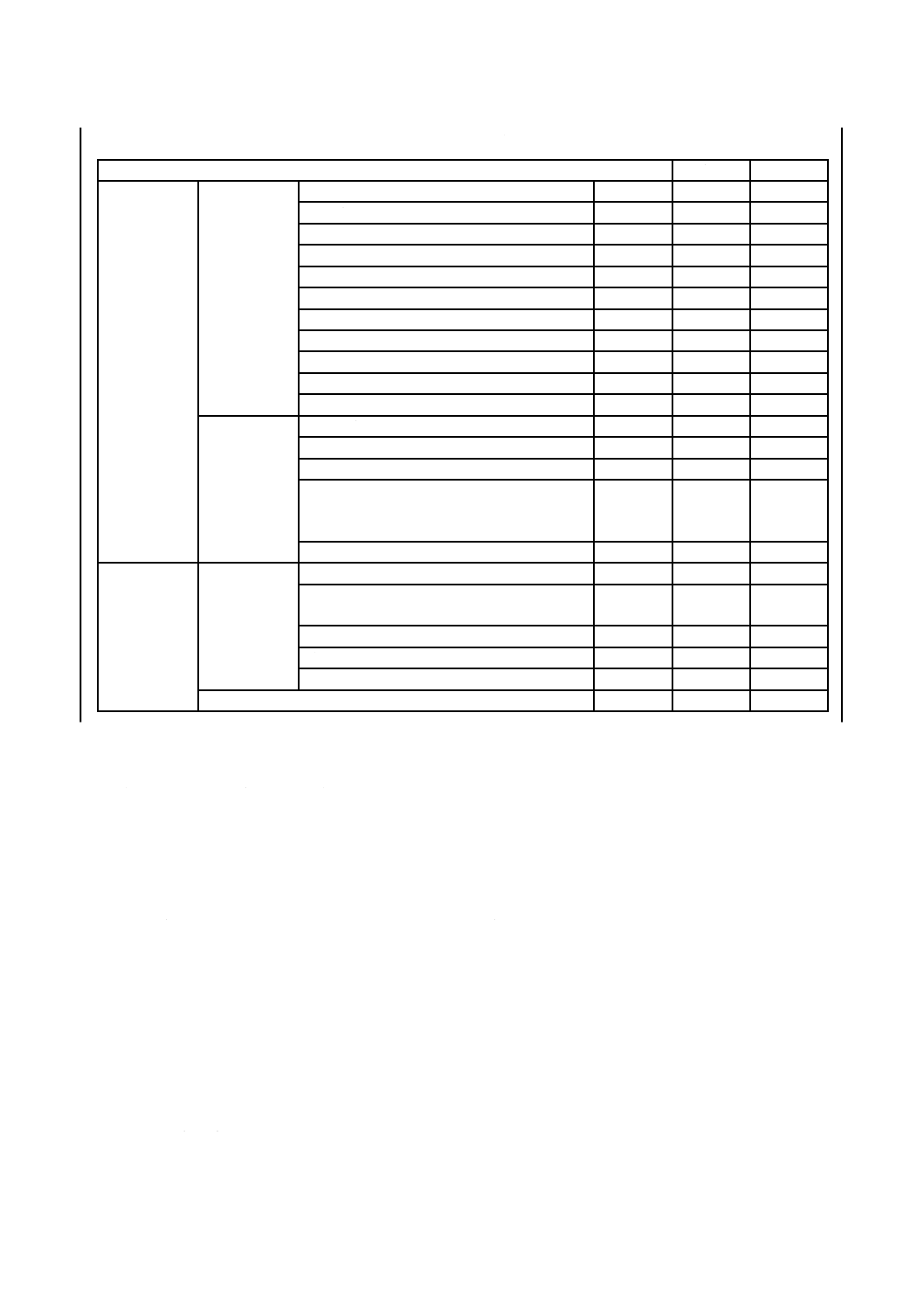
36
B 7607:2018
表8−検査の種類及び検査項目
項目
型式検査
受渡検査
全ての自動捕
捉式はかりに
対する要件
計量性能試験 一般
A.3.1
○
○
起動時間
A.3.2
○
−
動補正の範囲
A.3.3
○
○
ゼロ点設定
A.3.4
○
○
ゼロ点の安定性及び自動ゼロ点設定の頻度
A.3.5
○
○
風袋
A.3.6
○
○
偏置
A.3.7
○
○
代替動作速度
A.3.8
○
○
平衡安定性試験
A.3.9
○
○
表示装置及び印字装置の一致
A.3.10
○
○
構成部品及びプリセット制御の保護
A.3.11
○
○
影響因子試験 静的温度
A.4.2.1
○
−
ゼロ点表示の温度影響
A.4.2.2
○
−
高温高湿(定常状態)
A.4.2.3
○
−
電源電圧変動
A.4.2.4
A.4.2.5
A.4.2.6
○
−
傾斜
A.4.2.8
○
−
電気式はかり
に対する追加
要件
妨害試験
AC主電源の短時間停電試験
A.4.3.1
○
−
電気的ファストトランジェント/バーストイ
ミュニティ試験
A.4.3.2
○
−
サージ試験
A.4.3.3
○
−
静電気放電試験
A.4.3.4
○
−
電磁イミュニティ試験
A.4.3.5
○
−
スパン安定性試験
A.5
○
−
8.2
型式検査
8.2.1
文書
(この規格では,適用しない。)
8.2.2
一般要求事項
型式検査は,その型式を代表する1台以上で,通常は3台を超えない自動捕捉式はかりで行う。自動捕
捉式はかりの性能が特定の操作方法又は特定の使用方法で影響を受ける可能性があって,その条件が現場
での動作以外に再現できない場合,1台以上の自動捕捉式はかりをその代表的な現場に設置して行う。1
台以上の自動捕捉式はかりは,シミュレーション試験に適した形で8.2.3に規定した試験を行う。
8.2.3
適用要件
自動捕捉式はかりは,この規格の要件に適合することを確認するため,次の要件に適合しなければなら
ない。
− 箇条4の計量要件[特に,7.1.3.1に規定した試験荷重又は製造業者が指定した試験荷重を用いた4.5
の最大許容(平均)誤差及び最大許容標準偏差に関連する要件]
− 箇条5の技術要件
− 箇条6の電気式はかりに対する追加要件(該当する場合)
8.2.3.1
動作試験
試験は,次のとおり行う。
37
B 7607:2018
− 5.11の表記事項に基づいて行う。
− 意図した正常な使用条件下で行う。
− 箇条7の試験方法によって行う。
精度要件は,箇条4に適合しなければならない。
8.2.3.2
技術要件に適合していることへの確認及び試験
確認及び試験は,5.2の動作の安全保護に対する要件を評価するために,完成された自動捕捉式はかりで
行わなければならない。
8.2.3.3
影響因子の試験
影響因子試験は,次の事項に従って7.4.5及び附属書Aに規定した完成された自動捕捉式はかり又はシ
ミュレータに適用しなければならない。
− 全ての自動捕捉式はかりに対して4.9に従って適用
− 電気式はかりに対して箇条6に従って適用
8.2.3.4
誤差の配分
モジュールを個別に試験する場合は,次の要件を適用する。
分離して試験するモジュールに適用する誤差の限界値は,4.5に規定した完成された自動捕捉式はかりの
最大許容誤差又は表示の許容偏差の誤差配分(pi)に等しい。誤差配分は,モジュールを組み込んだ完成
された自動捕捉式はかりにおけるいずれのモジュールについても,少なくとも同一精度等級でなければな
らない。
誤差配分(pi)は,次の式による。
p12+p22+p32+…≦1
誤差配分(pi)は,そのモジュールの製造業者が選び,次の条件を考慮して,適切な試験で検証しなけ
ればならない。
− 純粋なデジタル装置に対しては,誤差配分は“0”に等しい(pi=0.0)。
− 計量部モジュールに対しては,誤差配分は“1”に等しい(pi=1.0)。
− 複数のモジュールが問題とする誤差に寄与している場合,その他の全てのモジュール(デジタルロー
ドセルを含む。)の誤差配分(pi)は0.3以上0.8以下でなければならない。
ロードセル又は他のモジュールの計量特性がJIS B 7612-1及びJIS B 7612-2,又は適用可能なその他の
規格の要件に基づいて既に試験されている場合,申請者が要求するなら型式検査のためにその結果を使用
してもよい。
8.2.4
試験場所
型式検査は,製造業者の事業所か他の適切な場所で行う。
8.2.5
型式検査報告書及び精度等級の決定
型式検査報告書には,型式検査段階での精度等級X(x)及び/又は精度等級Y(y)を記載する。精度等級は,
受渡検査における各自動捕捉式はかりの計量特性によって決定する。
8.3
受渡検査
8.3.1
一般要求事項及び適用要件
自動捕捉式はかりは,計量要件(4.1〜4.8)及び技術要件(箇条5)に適合していることを確認するため
に,受渡検査を使用を意図した品物に対して,通常の使用条件で動作しているときに行う。
静的計量はかりは,7.4.5に適合している条件において,非自動運転で受渡検査を行ってよい。受渡検査
は,自動捕捉式はかりを完全に組み立て,使用を意図した場所に固定し,自動捕捉式はかりの使用場所で
38
B 7607:2018
行う。自動捕捉式はかりの組み立て及び設置は,検査目的であるか正常動作であるかにかかわらず,計量
動作が同じであるように設計しなければならない。
8.3.2
動作試験
試験は,自動運転の通常モードで次のとおり行う。
− 5.11の表記事項に基づいて行う。
− 意図した定格条件下で行う。
− 7.1に規定した試験方法で行う。
精度要件は,4.5に適合しなければならない。
8.3.3
試験の実施
(この規格では,適用しない。)
8.3.4
精度等級の決定
8.3.4.0A 一般
精度等級の決定は,8.3.4.1及び8.3.4.2による。ただし,型式検査で決定した精度等級は,使用する試験
荷重がかなり安定性に欠けるか,又は寸法が異なる場合,受渡検査では達成できない場合がある。この場
合,4.5.1.1又は4.5.1.2,及び5.11.2によって低い精度等級を表記する。型式検査で決定した精度等級より
高い精度等級を表記することは許されない。
8.3.4.1
カテゴリXの自動捕捉式はかり
カテゴリXの自動捕捉式はかりは,a)及びb)による。
a) 受渡検査で試験に使われる製品に対して,4.5.1.1に規定する精度等級を適用する。
b) 次の事項を検証する。
1) 5.11によって表記した精度等級が,a)と同等であること。
2) 5.11によって表記した等級指定係数(x)が,a)で決めた係数(x)と同じか,又はより小さい数で
あること。
8.3.4.2
カテゴリYの自動捕捉式はかり
カテゴリYの自動捕捉式はかりは,4.5.1.2に規定する精度等級を適用しなければならない。
8.4
後続計量管理
(この規格では,適用しない。)
39
B 7607:2018
附属書A
(規定)
自動捕捉式はかりの試験手順
A.1 一般試験条件
A.1.1 電源
各試験に対して別に指定がない場合,自動捕捉式はかりは,製造業者が指定した予熱時間以上通電し,
試験中は通電したままの状態に維持する。
A.1.2 ゼロ点設定
自動捕捉式はかりのゼロ点は,試験の開始前に設定し,有意な誤りが生じた場合のリセットを除き,試
験中いかなる場合においても再設定してはならない。
自動ゼロ点設定装置は,各試験に規定したとおりとする。
A.1.3 動補正
動補正は,製造業者の指示に従い,試験の前に作動させる。
影響因子試験の前に,各試験荷重に対して動補正を繰り返してもよいが,それ以降は繰り返してはなら
ない。
動補正は,有意な誤りが生じた後を除き,妨害試験中は繰り返さないほうが望ましい。
動補正が計量範囲全体の校正手順の一部である場合,異なる試験荷重での試験の前にその動補正を繰り
返さないほうが望ましい。
A.1.4 静的試験荷重
ばら状の物体を計量するように設計された自動捕捉式はかりは,A.4.2の影響因子試験に対する静的試験
荷重を適用する。寄せ集めた個別荷重を計量するように設計された静的計量はかりに対しては,7.4.5.1の
条件に適合している場合(A.4.2の試験の前に適用する試験を含む。),静的試験荷重を任意で適用すること
ができる。
A.1.5 温度
静的温度試験(A.4.2.1)及び高温高湿試験(定常状態)(A.4.2.3)を除き,試験は,安定した周囲温度と
し,別に指定がない場合,通常の室温で実施する。試験中に記録された最大温度差が5 ℃を超えず,自動
捕捉式はかりの使用温度範囲の1/5を超えないとき,及び温度の変化率が1時間当たり5 ℃を超えないと
きに,温度は安定しているとみなす。
自動捕捉式はかりは,結露が生じないようにしなければならない。
A.1.6 回復
自動捕捉式はかりは,個々の試験の後,続いて行う試験の前に,十分に回復させる。
A.1.7 予備負荷
自動捕捉式はかりは,A.3.2及びA.4.2.2の試験を除き,個々の計量試験の前には,ひょう量まで,予備
負荷をかける。
A.1.8 複目量はかり
一般的に各計量範囲は,個別の自動捕捉式はかりとして試験をする。
40
B 7607:2018
A.1.9 自動運転時の誤差評価
A.1.9.1 カテゴリX
カテゴリXの自動捕捉式はかりについて,質量の表示及び/又は印字若しくは質量と基準設定値間との
差は,平均誤差及び誤差の標準偏差を求めて決めるため,個々の試験荷重に対して提供する。実目量(d)
で,7.1.2に規定した個々の試験荷重の値に対して,最大許容誤差及び最大許容標準偏差の誤差を計算する。
これに代えて,7.1.8に規定する表3及び表4への適合を検証する他の手段を用いてもよい。
A.1.9.2 カテゴリY
A.1.9.2.1 0.2 e以下の目量をもつ表示
デジタル表示をもつ自動捕捉式はかりが,実目量(d)が0.2 e以下を表示する装置を備えている場合,
その装置を使って誤差を決定してもよい。その装置を使用した場合,検査報告書にその旨を記載すること
が望ましい。
A.1.9.2.2 0.2 eを超える目量をもつ表示
実目量(d)が0.2 eを超える場合,デジタル表示の丸め誤差を排除する。これを実行するためには,次
のいずれかの方法による。
a) 可能な場合,丸め誤差を排除するために,試験荷重の質量を次のいずれかによって選択する。
1) 最大許容誤差が1.5 e(又は0.5 e,2.5 e,...)である場合,試験荷重の質量を目量全体にできるだけ
近く選択する。
2) 最大許容誤差が1.0 e(又は2.0 e,3.0 e,...)である場合,試験荷重の質量を全目量プラス(又はマ
イナス)0.5 eにできるだけ近く選択する。
b) a)が適用できない場合,表5に規定した最大許容誤差に追加の0.5 eを加えることによって,丸め誤差
を考慮する。
A.1.10 非自動(静的)運転における誤差評価
A.1.10.1 0.2 e以下の目量をもつ表示
デジタル表示をもつ自動捕捉式はかりが,実目量(d)が0.2 e以下を表示する装置を備えている場合,
その装置を使って誤差を決定してもよい。その装置を使用した場合,検査報告書にその旨を記載すること
が望ましい。
A.1.10.2 0.2 eを超える目量をもつ表示の丸め誤差評価のための分銅
A.1.10.2.1 丸め前の誤差評価の一般的な方法
検査目量(e)のデジタル表示をもつ自動捕捉式はかりにおいて,目量の間を補完する,つまり,丸める
前の自動捕捉式はかりの計量値を決定するために,次のとおり表示の切換点を用いる。
ある試験荷重(L)において,表示値(I)を記録する。自動捕捉式はかりの表示値が明らかに1目量(1 e)
増加して(I+e)になるまで,例えば,0.1 eの荷重を順次載せていく。
荷重受け部に載せた追加荷重(ΔL)によって,丸める前の表示値(P)を次の式によって算出する。
L
e
I
P
Δ
2
1−
+
=
丸める前の誤差(E)は,次の式による。
L
L
e
I
L
P
E
−
−
+
=
−
=
Δ
2
1
例 5 gの検査目量(e)をもつ自動捕捉式はかりに1 kgを載せると,1 000 gを表示する。続いて0.5 g
の分銅を順次に加えていき,1.5 gの追加荷重で表示が1 000 gから1 005 gに変化する。上の式に
41
B 7607:2018
この結果を代入すると,次の式となる。
P=(1 000+2.5−1.5) g=1 001 g
このように,丸める前の真の指示は1 001 gであり,その誤差は,次の式による。
E=(1 001−1 000) g=+1 g
A.1.10.2.2 ゼロ点の誤差の補正
ゼロ点における誤差(E0)及び荷重(L)における誤差(E)を,A.1.10.2.1の方法で測定する。
丸める前の補正された誤差(Ec)は,次の式による。
Ec=E−E0
例 A.1.10.2.1の例に対して,ゼロ点において計算した誤差が+0.5 gとする。その場合の補正された
誤差(Ec)は,次の式のとおりとなる。
Ec=+1−(+0.5)=+0.5 g
A.2 検査工程
A.2.1 型式検査(8.2)
A.3〜A.5の試験を,箇条7の試験方法を適用して行う。
A.2.2 受渡検査(8.3)
受渡検査において,A.3.2及びA.3.4.2を除くA.3を適用する。使用する試験荷重は,7.1.3.2による。
A.3 計量性能試験
A.3.1 一般
A.3.1.1 自動運転に対する標準計量動作試験(8.2.3.1)
試験手順は,次のとおりとする。
a) 自動捕捉式はかりを使用中,通常作動する周辺の機器(EUTが使用場所に設置されている場合)を含
め,自動計量システムを始動する。
b) 荷重搬送システムを,最大速度に設定する(7.1.4)。
c) 四つの荷重を選ぶ。最小測定量及びひょう量,並びに最小測定量とひょう量との中間の最大許容誤差
の変わる点(3.3.2.6)を含む2点。最大動作速度を達成するには,上記の荷重個々に対して二組以上
の荷重が必要となる。7.1.5に規定した管理はかりでこの荷重を計量して,7.1.6に従って各試験荷重の
取決めによる真の質量値を決定する。
d) 個々の試験荷重に対する試験計量回数は,7.1.2に規定した試験荷重に対する試験計量回数とする。
e) 規定した試験計量回数だけ試験荷重を自動計量して,個々の質量の表示を記録する。次の事項に従っ
て,個々の計量誤差を決定する。
− カテゴリXの自動捕捉式はかりは,7.1.7.1による。
− カテゴリYの自動捕捉式はかりは,7.1.7.2による。
f)
7.1.8によってカテゴリXの自動捕捉式はかりに対する平均誤差及び誤差の標準偏差を,又はカテゴリ
Yの自動捕捉式はかりに対する個々の誤差を決定する。
標準計量動作試験は,次の多くの異なる試験に使用する。
− 動補正
− 動的計量はかりに対する偏置
− 静的温度
42
B 7607:2018
− ゼロ点表示の温度影響
− 電圧変動
− 動作試験
A.3.1.2 非自動(静的)運転に対する計量性能試験
次の計量試験は,7.4.5の条件に適合していることが前提で,影響因子試験中(A.4.2)の自動運転への代
案として非自動(静的)運転中に行う。
− 荷重をゼロ点から,順次,ひょう量まで載せ,同様にゼロ点まで荷重を降ろす。
− 初期固有誤差を測定する場合には,10以上の異なった荷重を選定し,他の計量試験の場合には,五つ
以上を選定する。
選定した荷重は,ひょう量,最小測定量及び最大許容誤差が変わる点に近いが,その値を超えない荷重
(複数)を含まなければならない。分銅を載せ・降ろしするときには,荷重を段階的に増加又は減少する
ようにしなければならない。
自動捕捉式はかりが自動ゼロ点設定装置又はゼロトラッキング装置をもつ場合,温度試験を除き,試験
中にそれを動作させてもよい。ゼロ点での誤差は,A.1.10.2.1によって測定する。
A.3.1.3 追加計量試験
ひょう量の20 %よりも大きい範囲をもつ初期ゼロ点設定装置をもつ自動捕捉式はかりは,範囲の上限を
ゼロ点として,追加計量試験を行わなければならない。
A.3.2 起動時間(6.2.3)
この試験は,電源投入後すぐの時間,計量性能が維持されていることを検証するためのものである。そ
の方法は,安定した表示が得られるまで自動運転が不可であることを確認し,電源投入から30分を経過す
る過程においてゼロ点の誤差及びスパンの誤差が要件に適合しているかを検証する。ゼロ点設定が全ての
自動計量サイクルの一部として作動しないのであれば,ゼロトラッキング装置及び自動ゼロ点設定装置は
作動してはならない。その場合,この機能は試験の一部として可能にするか又は模擬しなければならない。
計量性能が電源投入後の30分間維持されていることを検証するには,上記以外に次の試験方法を適用し
てもよい。
a) 試験の前に8時間以上は電源から切り離す。
b) コンセントに接続し,電源を投入する。
c) 表示器が安定するまで自動計量が始動しないことを確認する(6.2.3)。
d) 表示が安定したら直ちに,自動捕捉式はかりをゼロ点に設定する。
e) A.1.10.2.1の方法を用いてゼロ点における誤差を求め,この誤差をまずE0Iとして(初期ゼロ点設定の
誤差),このステップを繰り返してE0(ゼロ点設定誤差)を決定する。
f)
ひょう量に近い静的荷重を負荷する。A.1.10.2.1及びA.1.10.2.2の方法で誤差を決定する。
g) 次の点を検証する。
− ゼロ点の誤差(E0I)が,±0.25 eを超えない(5.5.2)。
− スパンの誤差が,表6に規定した最大許容誤差以下である。
h) 5分,15分及び30分後にe)及びf)を繰り返す。
i)
個々の時間間隔後に,次の点を検証する。
− ゼロ点変動誤差(E0−E0I)が,±0.25 eを超えない。
− スパン誤差が表6に規定した最大許容誤差以下である。
43
B 7607:2018
A.3.3 動補正の範囲(5.2.3)
A.3.3.1 範囲
動補正が作動できる計量範囲が限定されている場合,その計量範囲内の任意の質量において動補正を設
定し,その計量範囲の上限値付近及び下限値付近において標準計量動作試験(A.3.1.1)を行う。
A.3.3.2 範囲外のインタロック
動補正が作動できる計量範囲が限定されている場合,その範囲に近いが範囲外の荷重を計量しようとす
ることによって,規定範囲外の動作及びプリントアウトが禁じられていることを検証する。
A.3.4 ゼロ点設定(5.5)
A.3.4.1 ゼロ点設定モード
自動ゼロ点設定装置を試験するために,ゼロ点設定装置が自動計量サイクルの動作の一部として適切に
動作し,試験する前には自動計量サイクルを中断することを考慮に入れる必要がある。
ゼロ点設定範囲及びゼロ点設定精度は,自動捕捉式はかりの自動運転を中断した後,A.3.4.2に規定する
ように非自動(静的)運転中に荷重受け部に荷重を載せて試験しなければならない。
A.3.4.2 ゼロ点設定範囲
A.3.4.2.1 初期ゼロ点設定
初期ゼロ点設定範囲は,正の部分と負の部分との和である。
初期ゼロ点設定範囲の試験は,次による。
a) 正範囲 荷重受け部に何もない状態で,自動捕捉式はかりをゼロ点に設定する。荷重受け部に試験荷
重を載せ,自動捕捉式はかりの電源を切り,次に電源を投入する。荷重受け部に試験荷重を載せてい
き,自動捕捉式はかりの電源を再投入後,ゼロ点に設定ができなくなるまで繰り返す。ゼロ点に設定
できる最大の試験荷重が,初期ゼロ点設定範囲の正の部分である。
b) 負範囲
1) 荷重受け部に何もない状態で,自動捕捉式はかりをゼロ点に設定する。次に,荷重受け部の重要で
ない全ての構成部品を取り外し,自動捕捉式はかりの電源を切り,次に電源を再投入する。この時
点で,ゼロ点に設定できた場合,取り外した構成部品の質量は,初期ゼロ点設定範囲の負の部分と
して用いられる。
2) 荷重受け部の構成部品を取り外して,自動捕捉式はかりをゼロに設定できない場合,自動捕捉式は
かりが再びゼロを表示するまで,自動捕捉式はかりの検出部(例えば,荷重受け部を支える部品の
上)のどこかに分銅を加える。
3) 次に,分銅を取り除いていく。各分銅を取り除いた後に,自動捕捉式はかりの電源を切り,次に電
源を投入する。電源の再投入によって,自動捕捉式はかりがゼロに設定できる間に自動捕捉式はか
りの検出部から取り除くことができる分銅の最大値が,初期ゼロ点設定範囲の負の部分である。
4) 荷重受け部の荷重受け部の構成部品を取り除く方法では初期ゼロ点設定の負の部分を試験すること
ができない場合,3)の手順に進む前に試験荷重を加えて一時的にスパン調整してもよい。この試験
荷重は,正の部分の試験結果から計算することができる初期ゼロ点設定範囲の許容可能な負の部分
より大きいものとする。
5) 初期ゼロ点設定範囲の負の部分を,これらの方法で試験することができない場合,初期ゼロ点設定
範囲の正の部分だけを考慮する必要がある。
6) 試験後は,通常の使用状態において再組立て又はスパン調整を行う。
44
B 7607:2018
A.3.4.2.2 非自動ゼロ点設定及び半自動ゼロ点設定
この試験は,A.3.4.2.1と同様の手順によって行う。ただし,自動捕捉式はかりの電源を再投入すること
なく,ゼロ点設定装置を作動することによって行う。
A.3.4.2.3 自動ゼロ点設定
この試験は,自動捕捉式はかりの電源を再投入することなく,A.3.4.2.1の手順によって行う。
自動捕捉式はかりの可動部の分銅を少量取り除いていき,その後,自動ゼロ点設定装置が動作する時間
を与え,自動捕捉式はかりが自動的にゼロに設定できるかどうかを確認する。自動捕捉式はかりが自動的
にゼロに設定できなくなるまでこの手順を繰り返す。
自動捕捉式はかりがゼロに設定できる条件下で,自動捕捉式はかりの可動部から取り除いた分銅の最大
値が,ゼロ点設定範囲である。
A.3.4.3 ゼロ点設定の精度
ゼロ点設定の精度は,非自動(静的)運転で試験荷重を次のとおり少量ずつ増加させることによって試
験を行う。
a) 自動捕捉式はかりをゼロに設定して,次にゼロ点設定装置を不能にする。自動捕捉式はかりにゼロト
ラッキング装置が備わっている場合,その表示をゼロトラッキングの範囲外にする(例えば,10 eを
負荷する。)。
b) 荷重受け部に試験荷重を載せる。表示がゼロからプラスに1目量変化するまで追加荷重(≦0.2 e)を
負荷するか,又はゼロトラッキングを不能にするため10 eの荷重を追加した場合,目量を変化させる
まで行う。
c) A.1.10.2.1の方法によってゼロ点における誤差を計算する。
注記 現実的な理由で,a)〜c)に記載した方法を使っても自動ゼロ点設定装置の精度を求めることが
難しい場合がある。ただし,この装置の機能性は,動作試験の前に荷重受け部の静的部分にゼ
ロ点設定範囲内の荷重を負荷することで検査する。自動ゼロ点設定装置及びその精度の影響は,
A.3.1.1の自動運転に対する動作試験で証明できる。
A.3.5 ゼロ点の安定性及び自動ゼロ点設定の頻度(5.5.4)
この試験は,プログラム可能な自動ゼロ点設定装置を備えた自動捕捉式はかりにだけ適用し,全ての自
動計量サイクルの一部として自動ゼロ点設定装置が動作する自動捕捉式はかりには,適用しない。
自動ゼロ点設定装置によるゼロ点の誤差が,±0.5 eを超えないことを確認するため,次の方法を適用す
る。
a) 次の二つの値の小さい値を選択することによって,最大許容時間間隔を決定する。
− 5.5.4によって製造業者が指定した最大時間間隔
− A.4.2.2から得られるeの端数の最大ゼロ変化で3分を除した値[精度等級XI及び精度等級Y(I)の
自動捕捉式はかり],又は15分を除した値(その他全ての等級)。
例 最大ゼロ点変化=0.33 e/(5 ℃)[精度等級Y(a)の自動捕捉式はかり]
15分/0.33=45分(0.75時間)
b) 自動捕捉式はかりが自動的にゼロ点設定できるようにする。
c) a)で設定した最大許容ゼロ点設定間隔に近い間隔の後,自動ゼロ点設定装置が作動しないうちに,
A.3.4.3の試験を実施する。
d) b)及びc)は,自動捕捉式はかりの電源を投入した後の自動捕捉式はかりが作動可能となった直後に,
すなわち,通常の予熱時間の直後にも実施する。
45
B 7607:2018
注記 a)の3分間又は15分間の値は,次の計算で求める。
1) 定常大気温度変化の最大許容速度は,5 ℃/時間である(A.1.5)。
2) 5.5.2で最大許容ゼロ点設定誤差(Ezsmax)が与えられる。
Ezsmax≦0.25 e
5.5.4で最大許容ゼロ点確認誤差(Ezcmax)が与えられる。
Ezcmax≦0.5 e
これによって最大許容ゼロ点変動(Ezcmax−Ezsmax)が得られる。 Ezcmax−Ezsmax=0.25 e
精度等級XI及び精度等級Y(I)の自動捕捉式はかりに対しては,次のとおりである。
・ A.4.2.2で最大許容ゼロ点変動の要件。
Δzmax/(1 ℃)≦e
・ 定常大気温度に対して5 ℃/時間(a)。
Δzmax/12分間≦e
・ 最大許容ゼロ点変動(b)
Δzmax/3分間≦0.25 e
その他全ての自動捕捉式はかりに対して,次のとおりである。
・ A.4.2.2が最大許容ゼロ点変動の要件。
Δzmax/(5 ℃)≦e
・ 定常大気温度に対して5 ℃/時間(a)
Δzmax/1時間≦e
・ 最大許容ゼロ点変動(b)
Δzmax/15分間≦0.25 e
A.3.6 風袋(5.6)
A.3.6.0A 一般
風袋設定は,通常モードで試験しなければならない。該当する場合,5.6の要件を検証する他の方法を使
用することができる。
静的風袋に対しては,荷重受け部に風袋を載せて,風袋引き装置が動作できるようにする。
動的風袋に対しては,荷重受け部に風袋計量する荷重を通して,風袋引き装置が動作できるようにする。
A.3.6.1 計量試験
A.3.6.1.1 自動運転
この試験は,自動運転で行う。ゼロ点設定装置は,作動させておく。自動運転に対する動作試験(A.3.1.1
による。)は,複数の異なる風袋量を用いて行わなければならない。複数の試験荷重を選択する。その一つ
は最小測定量に近い値,もう一つは最大可能な正味荷重に近い値を選択する。
自動捕捉式はかりに加算式風袋引き装置が備わっている場合,1回の計量試験を最大加算風袋量に近い
風袋値で行う。
A.3.6.1.2 非自動(静的)運転
計量性能試験(A.3.1.2)によって,荷重を載せ・降ろしすることは,複数の異なる風袋を用いて行う。
五つ以上の荷重ステップを選択する。このステップは,最小測定量に近い値,最大許容誤差が変化する値
又は近い値,及び正味量の最大値に近い値を含める。
自動捕捉式はかりに加算式風袋引き装置が備わっている場合,1回の計量試験を最大加算風袋量に近い
風袋値で行う。
A.3.6.2 風袋引き装置の精度
A.3.6.2.0A 一般
風袋引き装置の精度は,風袋引き装置を用いて表示をゼロ点に設定し,A.3.4.3に規定する同様の方法で
試験をする。
A.3.6.2.1 静的風袋
風袋引き装置を動作させて,表示が1目量確実に変化するまで追加分銅を使って,風袋荷重を増加する。
風袋設定精度は,±0.25 eを超えないことをA.1.10.2.1の方法で検証する。
46
B 7607:2018
A.3.6.2.2 動的風袋
風袋引き装置を動作させ,その自動捕捉式はかりを停止し,A.3.6.2.1によって精度を求める。この方法
が現実的でない場合,動的風袋設定の精度は,正味荷重が最大許容誤差内にあることを検証するために
A.3.6.1の計量試験を行う。
A.3.7 偏置(4.8.1及び7.4.4)
A.3.7.1 動的計量はかりに対する偏置試験
試験は,自動捕捉式はかりを正常な動作状態下にして,自動運転中に行う。ゼロ点設定装置及びゼロト
ラッキング装置は作動させる。動補正は荷重を通す前に設定できる。
ひょう量の1/3に等しい試験荷重(該当する場合,最大加算風袋量を加重)を荷重受け部全体にわたっ
て,次のベルトの位置に試験荷重を負荷する(図A.1に例を示す。)。
− バンド1は,荷重搬送システムの中心から片側の縁の間
− バンド2は,荷重搬送システムの中心から反対側の縁の間
荷重搬送システムの進行方向
図A.1−動的偏置試験における試験荷重の負荷箇所の例
荷重受け部に規定された試験計量回数分の試験荷重(7.1.2)を通す。誤差及び偏差は,4.5.1に適合しな
ければならない。
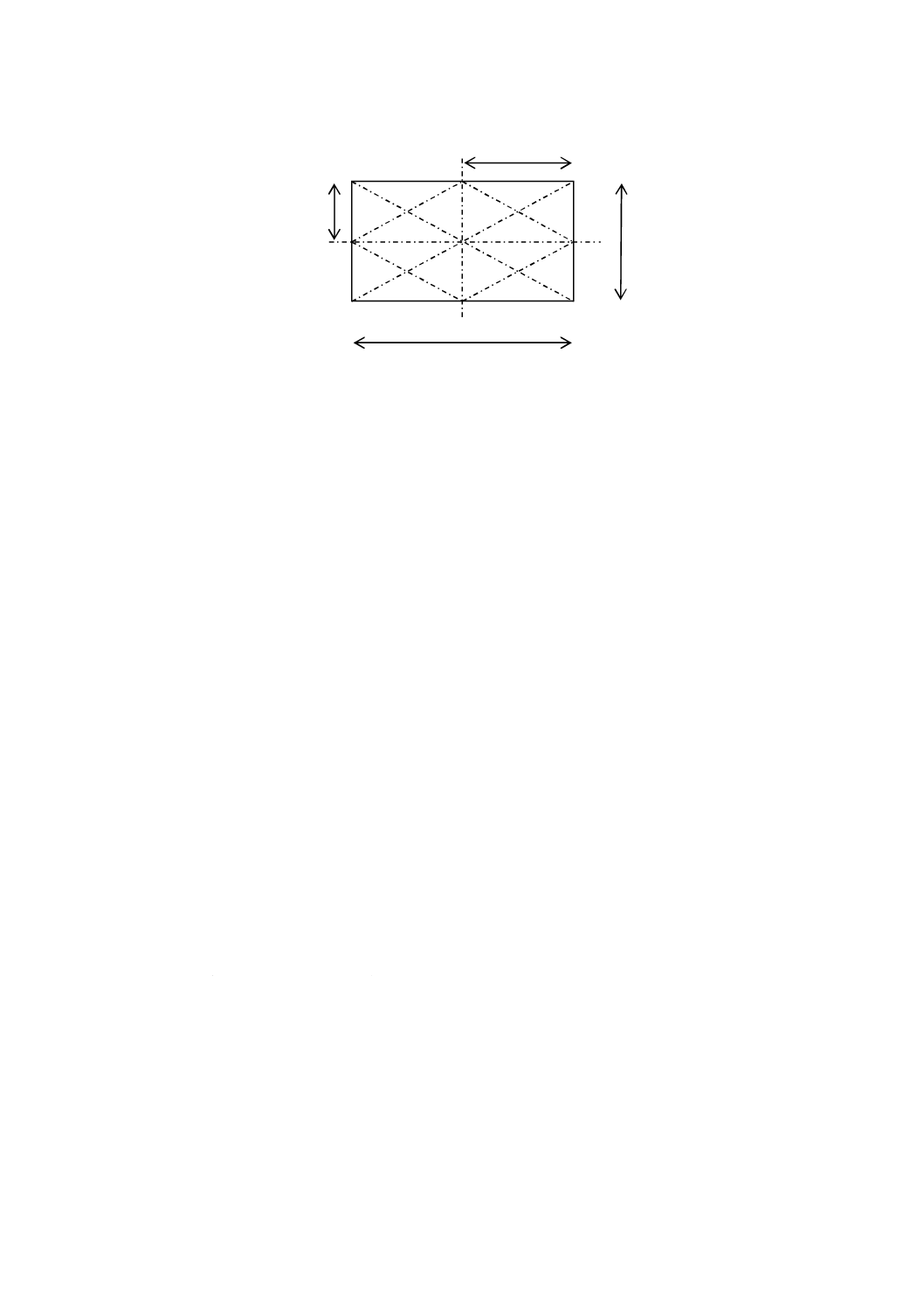
A.3.7.2 静的計量はかりに対する偏置試験
ひょう量の1/3に等しい試験荷重(該当する場合,最大加算風袋量を加重)を固定荷重搬送システムの
4区分に個々に負荷する(図A.2に例を示す。)。支持点数(n)が4点を超える荷重搬送システムをもつ自
動捕捉式はかりは,各支持点に,ひょう量(該当する場合,最大加算風袋量を加える。)を1/(n−1)で除し
た試験荷重を負荷する。
単一の分銅を使用する場合,区分の中央にその荷重を負荷する。複数の小さい分銅を使用する場合は,
その区分上に均一に負荷する。
誤差は,4.5.2に適合しなければならない。
W
1/2 W
バンド1
W
1/2 W
バンド2
47
B 7607:2018
図A.2−静的偏置試験における試験荷重の負荷箇所の例
A.3.8 代替動作速度(7.1.4)
試験は,次のとおり行う。
最小測定量付近及びひょう量付近の二つの試験荷重を選択する。
動補正は,いずれか一つの試験荷重を用いて行うが,二つの試験荷重で動補正の範囲が異なる場合には,
新たな試験荷重を使用する前に再度動補正を行ってもよい。
通常使用している周辺装置も含めて,自動計量システムを開始する。試験は,自動運転中に行う。ゼロ
点設定装置は作動させる。
試験計量回数は,試験荷重の質量による(7.1.2)。
荷重搬送システムをその最大動作速度に,また,その動作範囲のほぼ中間の速度に設定する(7.1.4)。
自動捕捉式はかりがプリセット速度に対応した最大の荷重を指定している場合,個々のプリセット速度
における最大の荷重で試験する。この場合,各速度に対して最小及び最大許容誤差の変わる値で再試験す
る必要はない。
規定する回数の試験荷重を荷重受け部に通過させ,その結果を記録する。
該当する場合,最大許容誤差は,4.5.1に規定したとおりとする。
A.3.9 平衡安定性試験(5.4.1)
この試験は,静的計量はかりにだけ適用する。
次の安定した釣合いが,詳細かつ十分に記載されているかどうか,製造業者の記載書類を確認する。
− 安定した釣合いの基本的原理,機能及び判断基準
− 安定した釣合いの機能の全ての調整可能及び調整不可能なパラメータ(時間間隔,計量サイクル数な
ど)
− これらのパラメータへの封印
− 安定した釣合いにおいて重要な調整の定義
ひょう量の50 %まで,又は関連する機能の動作範囲に含まれる荷重までの負荷を自動捕捉式はかりに載
せる。1回の動作で,手動によって釣り合った状態を崩し,データ印字,データ保存又は他の機能に対す
る指令を可能な限り早く出す。印字又はデータ保存の場合は,印字後5秒間に表示値を読む。二つ以内の
隣接した値で,その中の一つは最終計量値の印字値を表示する場合,安定した釣合いがとれているとみな
す。
ゼロ点設定装置又は風袋引き装置の場合は,A.3.4.3及びA.3.6.2によって5回の試験を行い,精度を検
査する。
W
1/2W
L
1/2L
48
B 7607:2018
釣合いの連続妨害の下で,安定した釣合いを必要とする機能,例えば,印字,記憶又はゼロ点設定操作
がいずれも行われないかどうか確認する。
A.3.10 表示装置及び印字装置の一致
試験中,同一荷重に対して同一の目量をもつ二つの装置の表示の差は,次の事項について確認する。
− デジタル表示又は印字装置では,計量結果間の差が“0”となる。
− アナログ指示に対しては,自動計量の最大許容誤差の絶対値を超えない。
A.3.11 構成部品及びプリセット制御の保護(5.2.6)
許可を受けていない調整,又は構成部品,インタフェース,ソフトウェア装置及びプリセット制御のリ
セットは,あらゆるアクセスも自動的に明らかにならなければ行えないことを確認する。
A.4 影響因子及び妨害試験
A.4.1 試験条件
影響因子及び妨害に対する計量的性能試験の要件については,個々の試験手順に規定する試験条件に従
う。
A.4.1.1 一般要件
影響因子試験及び妨害試験は,電気式はかりが規定の環境及び条件下で意図したとおり動作及び機能す
ることを検証することを意図している。該当する場合,個々の試験において,固有誤差を決める標準条件
を示す。
影響因子試験は,7.4.5によって正常動作の下の完成された自動捕捉式はかりに適用する。影響因子試験
を正常な動作状態で完成された自動捕捉式はかりで動作できない場合(例えば,自動捕捉式はかりのサイ
ズ及び/又は構成のため,全体としての試験ができない場合),その自動捕捉式はかりは,模擬した動作の
下において影響因子試験を受けることができる。この模擬動作が不可能な場合,その自動捕捉式はかりは
7.4.5.1に規定した静的条件下の影響因子試験の対象となることがある。
妨害は,静的条件下で自動捕捉式はかりに印加する。自動捕捉式はかりを静的条件下で妨害にさら(曝)
すことができない場合,模擬動作が許されることがある。これらの条件下で,妨害の許容できる影響は,
A.4.3の各試験に対して規定する。
一つの影響因子の影響を評価する場合,他の全ての因子は,正常に近い値で相対的に一定に保持される。
自動捕捉式はかりの部分を個別に審査する場合,誤差は,8.2.3.4によって配分する。
自動捕捉式はかり又はシミュレータの動作状態は,個々の試験において記録する。
自動捕捉式はかりを正常な構成以外で接続した場合,構成の情報についても記録する。
A.4.1.2 シミュレータ要件
A.4.1.2.1 一般
許可されている場合,影響因子試験及び妨害試験に使用するシミュレータには,その計量システムの全
ての電子装置を含む。
A.4.1.2.2 質量シミュレータ
シミュレータには,ロードセル及び荷重を適用するための手段も含まれなければならない。これが可能
でない場合,例えば,高容量はかりの場合,ロードセルシミュレータを使用するか,又はその代わりにロ
ードセル・インタフェースを改造して,小さな試験荷重に対しても設計された出力が可能なようなスケー
ル係数を組み込むことができる。シミュレータは,最小入力信号“μV/d”(目量当たり最小入力電圧)を
出力できなければならない。
49
B 7607:2018
ロードセルシミュレータの繰返し性及び安定性は,自動捕捉式はかりを分銅で試験するときと同様以上
の精度で自動捕捉式はかりの性能を求めることができなければならない。
A.4.1.2.3 文書
(この規格では,適用しない。)
A.4.2 影響因子試験(4.9)
A.4.2.0A 影響因子の試験項目及び試験条件
影響因子の試験項目及び適用条件を,表A.1に示す。
表A.1−影響因子試験
試験項目
適用条件
条項
静的温度
MPE a)
A.4.2.1
ゼロ点表示の温度影響
MPE
A.4.2.2
高温高湿(定常状態)
MPE a)
A.4.2.3
AC主電源電圧変動
MPE a)
A.4.2.4
DC主電源電圧変動
MPE a)
A.4.2.5
主電源に接続されていないDC電池電源,
非充電式,充電式及び再充電式の充電池
MPE a)
A.4.2.6
傾斜
MPE a)
A.4.2.8
注a) 4.6に規定する最大許容誤差
A.4.2.1 静的温度(4.9.1.1)
静的温度試験は,JIS C 60068-2-1,JIS C 60068-2-2及びJIS C 60068-3-1,並びに表A.2によって行う。
表A.2−静的温度試験
環境現象
試験条件
試験設定
静的温度
基準温度20 ℃
−
規定高温で2時間
JIS C 60068-2-2
規定低温で2時間
JIS C 60068-2-1
規定低温が0 ℃以下の場合,温度5 ℃
JIS C 60068-3-1
基準温度20 ℃
−
注記 静的温度試験の指針として,JIS C 60068-3-1も参考にすることができる。
試験手順の補助情報
試験目的
規定した高温及び低温において,6.1.1の基準に適合していることを検証する。ゼロ点
表示の温度影響(A.4.2.2)の試験は,この試験とともに実施してよい。
概略試験手順
試験は,温度安定に達するため,かつ,要求されている測定を行うために十分な期間,
規定の電源電圧を印加する。
事前準備
基準温度において,16時間通電しておく。
EUTの条件
EUTを電源に接続して製造業者が指定する予熱時間以上通電し,試験中は電源を投入
しておく。
ゼロ点設定装置及びゼロトラッキング装置は,通常動作と同様に,動作可能でなけれ
ばならない。
安定化
“自由空気”状態下の各温度で2時間。“自由空気”状態とは安定した状態に温度を
保つための最低の空気循環を意味する。
50
B 7607:2018
温度
4.9.1の規定による。
温度シーケンス
a) 基準温度[通常20 ℃であるが精度等級XI及び精度等級Y(I)の自動捕捉式はかり
には,規定温度限定値の平均値]
b) 規定する高温
c) 規定する低温
d) 規定低温が0 ℃以下の場合,温度5 ℃
e) 基準温度
大気圧
精度等級XI及び精度等級Y(I)の自動捕捉式はかりに対して,大気圧の変化を考慮す
る。
試験サイクル数
1サイクル以上
計量試験
基準温度及び規定する各温度で安定させた後,7.1.1及び7.1.2[非自動(静的)試験
は,A.3.1.2を参照]による質量の荷重及び試験分銅を使って,7.4.5に規定した場合を
除き,最大動作速度(A.3.1.1参照)の自動モードで計量試験を行う[非自動(静的)
試験は,A.3.1.2を参照]。
次の事項を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 荷重
e) 表示(該当する場合)
f)
誤差
g) 機能性能
最大許容変動
全ての機能は,設計どおりに作動しなければならない。
全ての誤差は,4.6に規定する最大許容誤差内でなければならない。
A.4.2.2 ゼロ点表示の温度影響(4.9.1.3)
この試験は,自動ゼロ点設定機能が全ての自動計量サイクルの一部として動作する自動捕捉式はかりに
対しては実施する必要がない。
自動捕捉式はかりは,無負荷の状態でゼロ点に設定され,基準温度,規定の最高温度,最低温度,5 ℃,
その後,基準温度の順に変化させる。安定後,各温度におけるゼロ点表示の誤差を測定し,1 ℃[精度等
級XI及び精度等級Y(I)の自動捕捉式はかり]又は5 ℃(その他の自動捕捉式はかり)当たりのゼロ点表
示の変化を計算する。1 ℃[精度等級XI及び精度等級Y(I)の自動捕捉式はかり]又は5 ℃(その他の自
動捕捉式はかり)当たりのゼロ点表示の変化は,この試験のいずれの温度変化(例えば,基準温度から最
高温度,最高温度から最低温度,最低温度から5 ℃,及び5 ℃から基準温度)についても計算する。
この試験は,静的温度試験(A.4.2.1)とともに実施してもよい。ゼロ点での誤差は,次の温度に移行す
る直前で,自動捕捉式はかりがある温度で安定状態になって2時間経過した後に,追加して測定する。
注記 これらの測定の前に,予備負荷は行わない。
自動ゼロ点設定装置又はゼロトラッキング装置は,作動させてはならない。
最大許容誤差
ゼロ点表示の変化は,温度差1 ℃[精度等級XI及び精度等級Y(I)の自動捕捉式はか
り]又は5 ℃(その他の自動捕捉式はかり)に対して,検査目量(1 e)を超えて変動
してはならない。
51
B 7607:2018
EUTの状態
製造業者が指定する予熱時間以上通電し,試験中は電源を投入しておく。
大気圧
精度等級XI及び精度等級Y(I)の自動捕捉式はかりに対して,大気圧の変化を考慮す
る。
A.4.2.3 高温高湿(定常状態)(6.1.2)
この試験は,自動捕捉式はかりの目量(e)が1 g未満の場合で,精度等級XI及び精度等級Y(I)の自動
捕捉式はかり又は精度等級XII及び精度等級Y(II)の自動捕捉式はかりには,適用しない。
高温高湿(定常状態)試験は,JIS C 60068-2-78及びJIS C 60068-3-4並びに表A.3に従って行う。
表A.3−高温高湿試験
環境現象
試験条件
試験設定
高温高湿(定常状態) 規定する高温及び相対湿度85 %で48時間
JIS C 60068-2-78
JIS C 60068-3-4
注記 高温高湿試験の指針として,JIS C 60068-3-4も参考にすることができる。
試験手順の補助情報
試験目的
一定温度において,6.1.1の基準に適合していることを検証する。
試験手順
7.4.5の条件によらず,静的計量はかり又は動的計量はかりに対して,非自動(静的)
運転において五つの異なる荷重(A.3.1.2)で行う。
事前準備
要求なし
EUTの条件
EUTを電源に接続して製造業者が指定する予熱時間以上通電し,試験中は電源を投入
しておく。ゼロ点設定装置及びゼロトラッキング装置は,通常動作と同様に動作可能
でなければならない。
EUTに結露が生じてはならない。
安定化
基準温度及び相対湿度50 %で3時間
4.9.1で規定する高温で2日間
温度
基準温度(20 ℃,又は20 ℃が使用範囲外である場合は,その使用温度範囲の平均値)
及び4.9.1で規定する高温
温度−湿度
48hシーケンス
a) 基準温度(20 ℃)及び相対湿度50 %
b) 規定する高温及び相対湿度85 %
c) 基準温度(20 ℃)及び相対湿度50 %
大気圧
精度等級XI及び精度等級Y(I)の自動捕捉式はかりに対して,大気圧の変化を考慮す
る。
試験サイクル数
1サイクル以上
計量試験
基準温度及び相対湿度50 %でEUTが安定した後に,五つ以上の異なる荷重,又は7.1.1
から選択した擬似荷重を適用して,A.3.1.2の非自動(静的)運転試験を行う。
次の事項を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
52
B 7607:2018
f)
表示(該当する場合)
g) 誤差
h) 機能性能
規定する高温及び相対湿度85 %でEUTが安定した後に,計量試験(A.3.1.2)を行っ
て,a)〜h)のデータを記録する。
基準温度及び相対湿度50 %でEUTが安定した後に,計量試験(A.3.1.2)を行って,
a)〜h)のデータを記録する。
最大許容変動
全ての機能は,設計どおりに作動しなければならない。
全ての誤差は,4.6に規定する最大許容誤差内でなければならない。
A.4.2.4 AC主電源電圧変動(4.9.2)
AC主電源電圧変動試験は,JIS C 61000-4-11及び表A.4によって行う。
表A.4−AC主電源電圧変動試験
環境現象
試験条件
試験設定
AC主電源電圧変動
Unom
JIS C 61000-4-11
上限値
Unomの110 %又はUmaxの110 %
下限値
Unomの85 %又はUminの85 %
Unom
自動捕捉式はかりが三相電源で駆動している場合,電圧変動は各相に連続して印加す
る。
試験手順の補助情報
試験目的
AC電源電圧変動の条件下で,6.1.1の基準に適合していることを検証する。
試験手順
試験は,温度の安定性を達するのに十分な時間,規定する電源電圧を印加する。
事前準備
要求なし
EUTの条件
EUTをAC主電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。
試験前に,EUTを可能な限りゼロ点付近に調整する。有意な誤りが生じた場合のリセ
ットを除き,試験中は再調整しない。
試験サイクル数
1サイクル以上
計量試験
7.1.1から選択した一つの荷重でEUTを試験する。試験は,7.4.5で規定する場合,自
動運転(A.3.1.1)で行うか,又は非自動(静的)運転(A.3.1.2)で任意に行わなけれ
ばならない。この場合,Min又はその近くの荷重,及び1/2 MaxとMaxとの間の荷重
を選択する。
大気圧の変化を考慮する。
公称電圧でEUTを安定させ,ゼロ点付近及び一つの荷重又は擬似荷重において,次の
事項を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
53
B 7607:2018
g) 誤差
h) 機能性能
表A.4に規定する各電圧に対して試験を繰り返して(場合によっては,試験計量を電
圧範囲の両端で繰り返す必要性に注意する。),表示を記録する。
最大許容変動
全ての機能は,設計どおりに動作しなければならない。
全ての誤差は,4.6に規定する最大許容誤差内でなければならない。
A.4.2.5 DC主電源電圧変動(4.9.2)
DC主電源で動作する自動捕捉式はかり及び自動捕捉式はかりの動作中に電池の充電が可能な充電式電
池で動作する自動捕捉式はかりの試験は,IEC 60654-2及び表A.5の試験条件によって行う。
表A.5−DC主電源電圧変動試験
環境現象
試験条件
試験設定
DC主電源電圧変動
Unom
IEC 60654-2
上限値
Unomの120 %又はUmaxの120 %
下限値
最小動作電圧(4.9.2参照)
Unom
電圧範囲を表示している場合は,その平均電圧を公称電圧Unomとして使用する。
試験手順の補助情報
試験目的
自動捕捉式はかりの動作中に電池の完全充電が可能である場合の充電電池を含むDC
主電源の電圧変動の下で,6.1.1の基準に適合していることを検証する。
試験手順
試験は,温度の安定性を達するのに十分な時間,規定する電源電圧を印加する。
事前準備
要求なし
EUTの条件
EUTをDC主電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。
試験前に,EUTを可能な限りゼロ点付近に調整する。
試験サイクル数
1サイクル以上
計量試験
7.1.1から選択した一つの荷重でEUTを試験する。試験は,自動運転(A.3.1.1)で行
うか,又は非自動(静的)運転(A.3.1.2)で任意に行う。
大気圧の変化を考慮する。
公称電圧でEUTを安定させ,ゼロ点付近及び一つの荷重又は擬似荷重において,次の
事項を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
Unomにおいてa)〜h)の表示値を記録する。Umaxの120 %,4.9.2に定義する最小動作電
圧,もう一度,Unomにおいても表示値を記録し,試験を繰り返す。
54
B 7607:2018
最大許容変動
全ての機能は,設計どおりに動作しなければならない。
全ての誤差は,4.6に規定する最大許容誤差内でなければならない。
A.4.2.6 主電源に接続されていないDC電池電源,非充電式,充電式及び再充電式の充電池(4.9.2)
電池駆動の自動捕捉式はかりの試験は,表A.6による。
表A.6−主電源に接続されていないDC電池電源,非充電式,充電式及び再充電式の充電池試験
環境現象
試験条件
試験設定
満充電されたDC電池
電圧の低電圧変動
Unom又はUmax
参照規格なし。
最小動作電圧(4.9.2参照)
Unom
電圧範囲を表示している場合は,その平均電圧を公称電圧Unomとする。
試験手順の補助情報
試験目的
自動捕捉式はかりの動作中に電池の完全充電が可能である場合の充電電池を含むDC
主電源の電圧変動条件下で,6.1.1に適合していることを検証する。
試験手順
試験は,温度の安定性を達成するのに十分な時間,規定する電源電圧を印可する。
事前準備
要求なし
EUTの条件
EUTをDC主電源に接続して,製造業者が規定する予熱時間以上の間通電しておく。
試験前に,EUTを可能な限りゼロ点付近に調整する。
試験サイクル数
1サイクル以上
計量試験
7.1.1から選択した一つの荷重でEUTを試験する。試験は,7.4.5に規定している場合,
自動運転(A.3.1.1)で行うか,非自動(静的)運転(A.3.1.2)で任意に行わなければ
ならない。
大気圧の変化を考慮する。
公称電圧でEUTを安定させ,ゼロ点付近及び一つの荷重又は擬似荷重において,次の
事項を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
自動捕捉式はかりが仕様書及び計量要件に従って正しく機能しなくなるまで,EUTへ
の電源電圧を低下させ,その表示値を記録する。もう一度,Unomにおいても表示値を
記録し,試験を繰り返す。
最大許容変動
全ての機能は,設計どおりに動作しなければならない。
全ての誤差は,4.6に規定する最大許容誤差内でなければならない。
A.4.2.7 12 V及び24 V路上走行車両用電池電源の電圧変動(4.9.2)
(この規格では,適用しない。)
55
B 7607:2018
A.4.2.8 傾斜(4.9.3)
この試験は,恒久的に設置されない自動捕捉式はかりだけに適用する。この試験は,傾斜が1 %以下に
調整可能なことが確立している場合,水準器付き可搬形自動捕捉式はかりには適用しない。
水準器を備えておらず固定位置に設置する意図のない自動捕捉式はかりは,次のとおり試験を行う。
試験情報
試験目的
4.9.3の条件に適合することを検証する。
試験手順
要求なし
事前準備
要求なし
EUTの条件
電源にEUTを接続して,製造業者が指定する予熱時間以上の間通電しておく。試験中
は電源を常に入れておく。ゼロ点設定及びゼロトラッキング装置は,通常動作で作動
させる。
試験サイクル数
1サイクル以上
試験の厳しさ
5 %傾斜において,Min及びMaxに近い荷重での動作試験。適用可能な場合は,傾斜
制御装置の動作試験を行う。
計量試験
試験は,次の個々の位置において8.2.3.1に規定する動作試験(Min及びMaxに近い
荷重を使用)からなる。試験は,7.4.5に規定する場合を除き,自動運転中に行う。動
作試験を行う前に個々に新しい位置でゼロ点設定を行う。
a) 基準位置
b) t %縦前方
c) t %縦後方
d) t %横前方
e) t %横後方
ここで,t %は,上記の試験の厳しさに規定する傾斜値である。
次のa)〜h)を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
最大許容変動
全ての機能は,設計どおりに動作しなければならない。
全ての誤差は,4.6に規定する最大許容誤差内でなければならない。
A.4.3 妨害試験(6.1.3)
A.4.3.0A 妨害試験の試験項目及び適用条件
妨害試験の試験項目及び適用条件を,表A.7に示す。
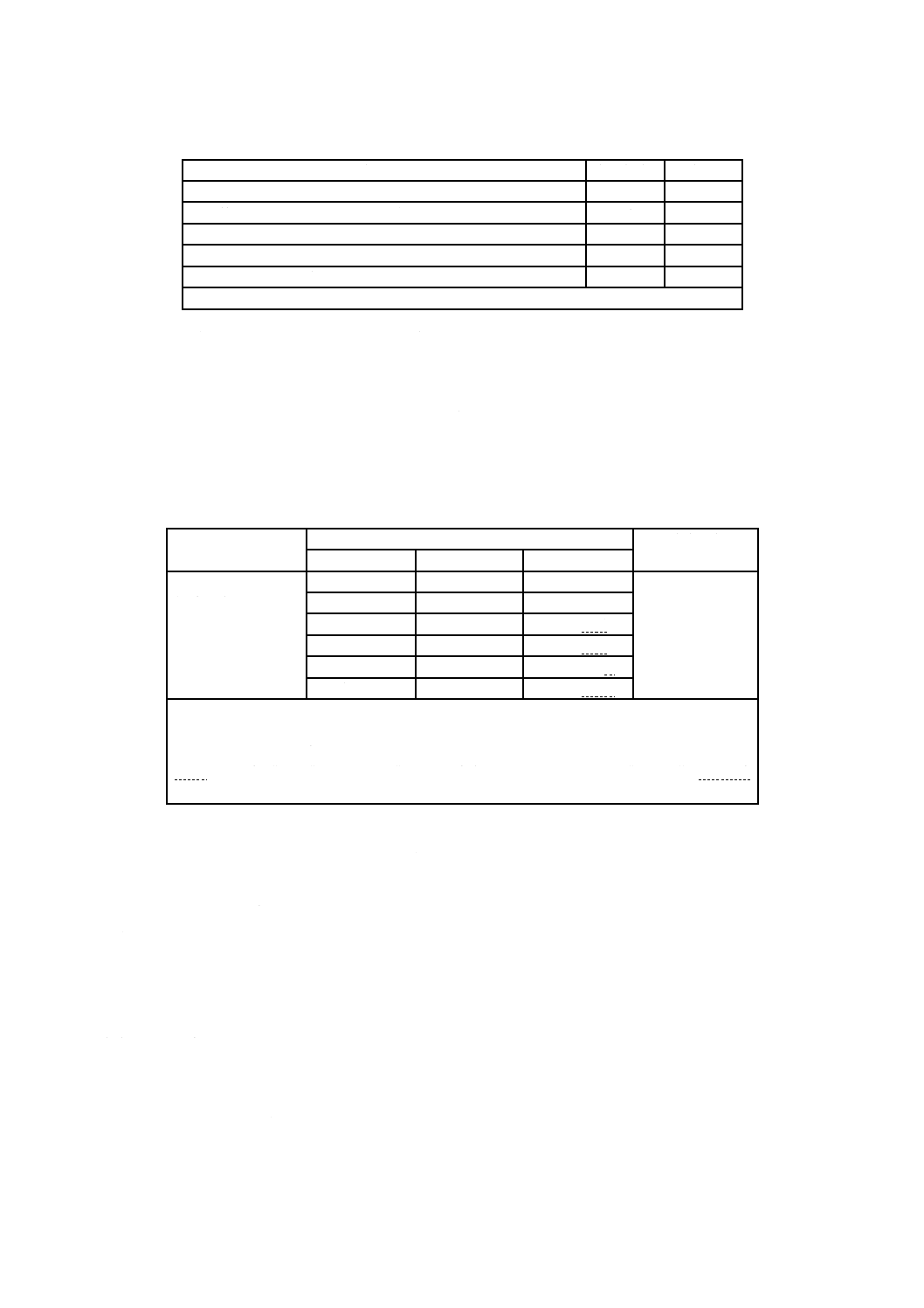
56
B 7607:2018
表A.7−妨害試験
試験項目
適用条件a)
条項
AC主電源の短時間停電試験
sf
A.4.3.1
電気的ファストトランジェント/バーストイミュニティ試験
sf
A.4.3.2
サージ試験
sf
A.4.3.3
静電気放電試験
sf
A.4.3.4
電磁イミュニティ試験
sf
A.4.3.5
注a) sf:有意な誤り(3.4.3.9に規定する1 e)
どの試験の前にも,丸め誤差を可能な限りゼロに近付ける。
自動捕捉式はかり(又はシミュレータ)にインタフェースがある場合,それらインタフェースの他の装
置への使用は,試験で模擬する。そのため,適切な周辺機器又は他の装置のインタフェースインピーダン
スを模擬するためのインタフェースケーブル3 mを個々に異なるタイプのインタフェースに接続する。
A.4.3.1 AC主電源の短時間停電試験
短時間停電(電圧ディップ及び短時間停電)試験は,JIS C 61000-4-11及び表A.8によって行う。
表A.8−AC主電源の短時間停電試験
環境現象
試験条件
試験設定
試験
振幅
継続時間
電圧ディップ及び
短時間停電
試験 a
0 %
0.5
JIS C 61000-4-11
試験 b
0 %
1
試験 c
40 %
10/12 a)
試験 d
70 %
25/30 a)
試験 e
80 %
250/300 a)
瞬断試験
0 %
250/300 a)
AC電源電圧の1サイクル又は1/2サイクル(ゼロクロスにおいて)の振幅を規定した時間
減少するのに適した試験装置を用いる。試験設備は,EUTに接続する前に調整しておく。10
秒以上の間隔で10回繰り返す。
注a) 例えば,“10/12”の表示は,“50 Hzの試験に対しては10サイクル”及び“60 Hzの試
験に対しては12サイクル”の継続時間を適用することを意味している。
試験手順の補助情報
試験目的
主電源短時間停電及び下降の間,小さな静的荷重の表示が6.1.3の規定に適合するこ
とを検証する。
試験手順
要求なし
事前準備
要求なし
EUTの条件
EUTをAC主電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。
試験前に,EUTを可能な限りゼロ点付近に調整する。試験中はゼロ点設定装置を作動
させず,有意な誤りが生じた場合のリセットを除き,再調整しない。
試験サイクル数
1サイクル以上
計量試験
小さな静的荷重でEUTを試験する。
全ての因子を標準条件下で安定させる。一つの荷重又は擬似荷重において,次の事項
を記録する。
a) 日時
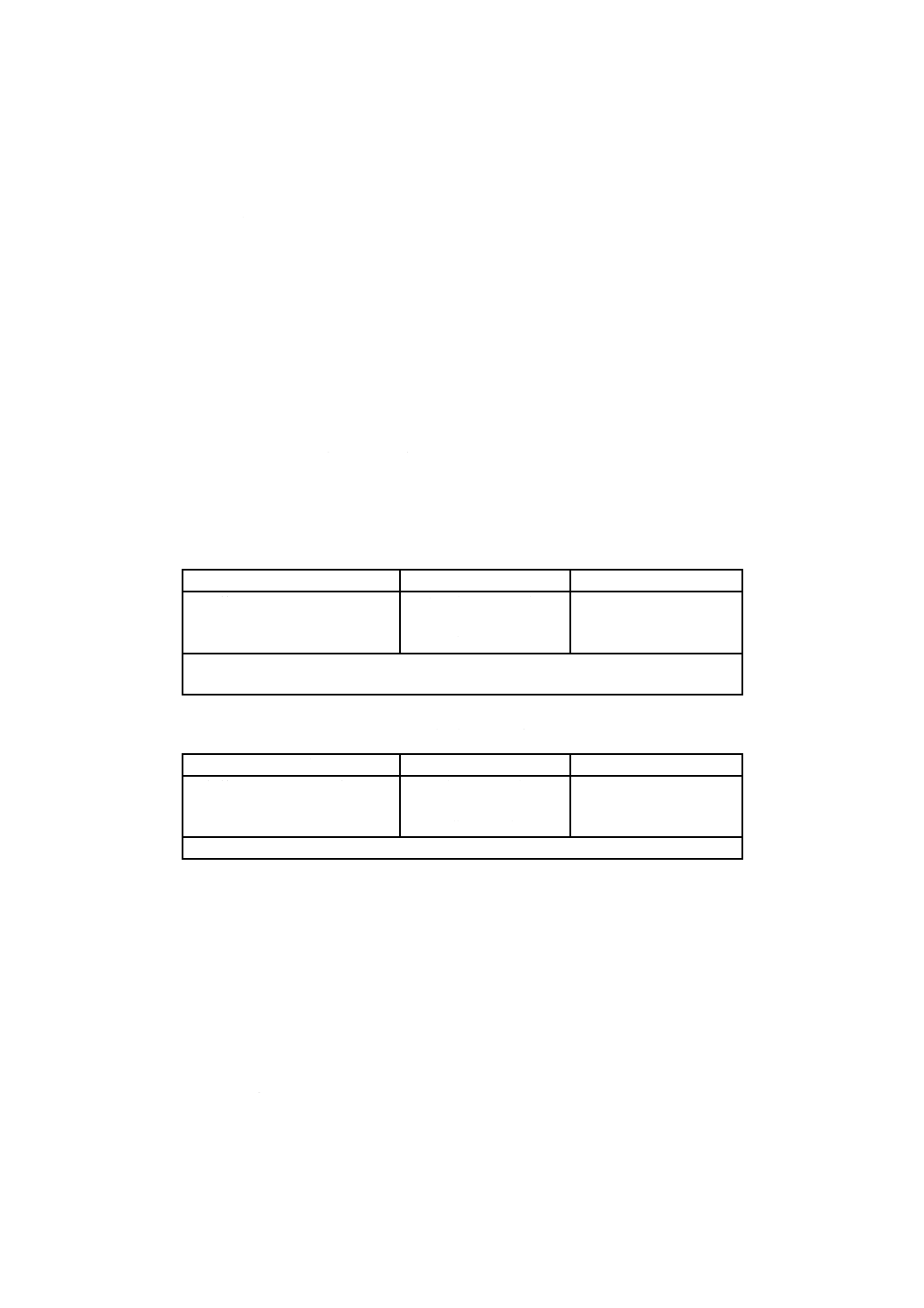
57
B 7607:2018
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
表A.8の試験条件によって,電圧を対応する時間(サイクル数)まで中断し,JIS C
61000-4-11の8.2.1(電圧ディップ及び短時間停電)に規定する試験を行う。中断中,
EUTへの影響を観察して,該当するものがあったときは記録する。
最大許容変動
妨害が加わった場合と妨害なしの場合との差が,1目量(1 e)を超えないか,又はEUT
が有意な誤りを検出して対処しなければならない。
A.4.3.2 電気的ファストトランジェント/バーストイミュニティ試験
バースト試験は,JIS C 61000-4-4,表A.9(信号線及び制御線の場合)及び表A.10(電源供給線の場合)
によって,正極及び負極の各極性で1分間以上行う。
表A.9−I/O回路及び通信線路上の電気バースト試験
環境現象
試験条件
試験設定
電気的ファストトランジェント
コモンモード
0.5 kV(電圧ピーク)
5/50 ns T1/Th
5 kHz(繰返し率)
JIS C 61000-4-4
製造業者の機能仕様書に従って,全長3 mを超えるケーブルをもつポート又はインタ
フェースだけに適用する。
表A.10−電源供給線の電気バースト試験
環境現象
試験条件
試験設定
電気的ファストトランジェント
コモンモード
1 kV(電圧ピーク)
5/50 ns T1/Th
5 kHz(繰返し率)
JIS C 61000-4-4
DC電源ポートは,使用中に主電源に接続できない電池駆動機器には適用しない。
試験手順の補助情報
試験目的
電気的ファストトランジェントを電源供給線,I/O(入出力)回路及び信号線に個々に
印加している間,小さな静的荷重に対する表示が6.1.3の規定に適合することを検証
する。
試験手順
バーストの極性は,正及び負の両方を適用する。試験継続時間は,各振幅及び各極性
に対して1分以上とする。主電源線路への結合回路網は,その主電源線路に分散する
バーストエネルギーを防止するためのブロッキングフィルタを備える。このバースト
をI/O回路及び通信線に結合するには,容量性結合クランプを使用する。
事前準備
要求なし
EUTの条件
試験装置は,EUTを接続する前に調整する。
EUTを電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。試験前
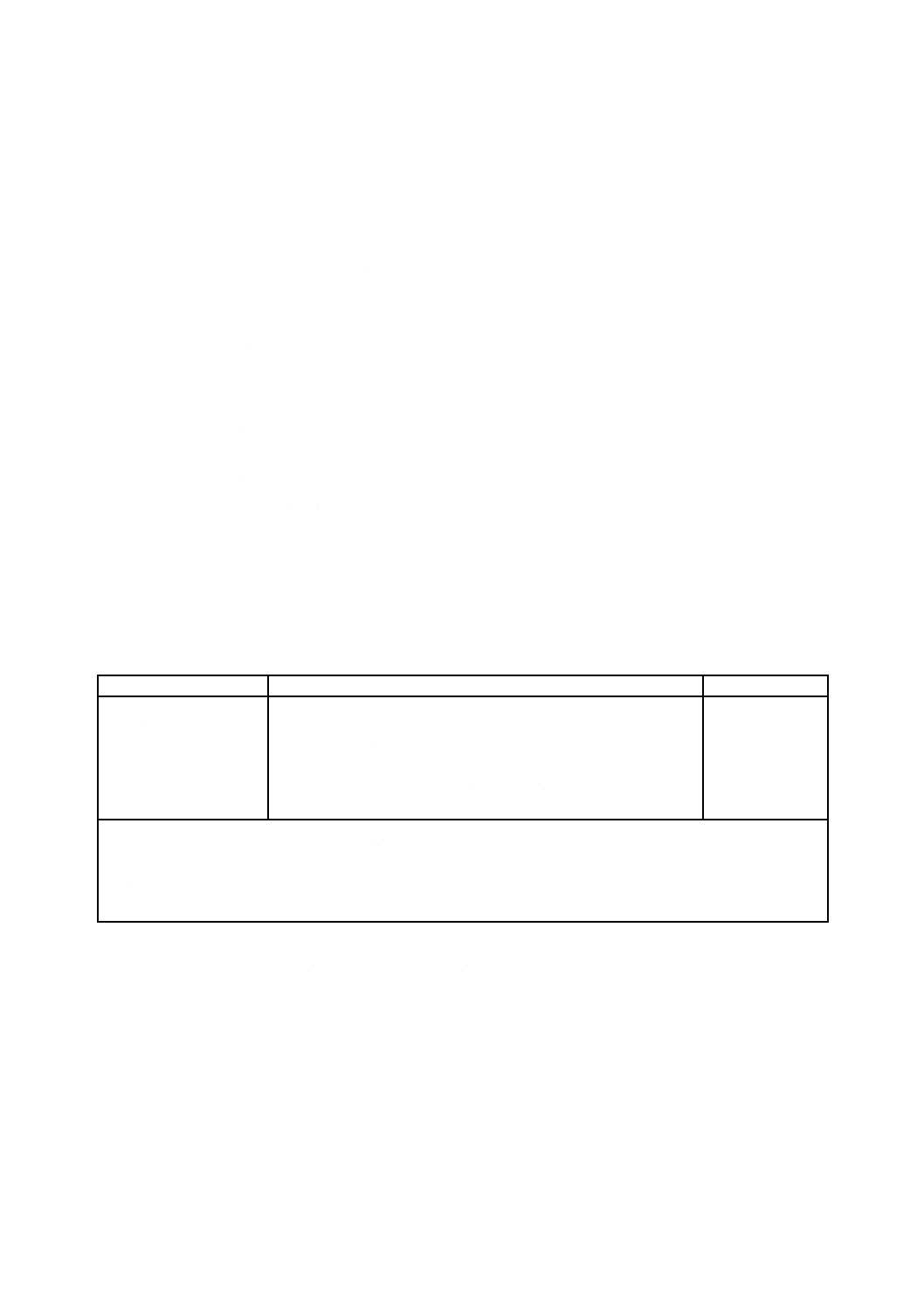
58
B 7607:2018
に,EUTを可能な限りゼロ点付近に調整する。試験中はゼロ点設定装置を作動させず,
有意な誤りが発生した場合のリセットを除き,再調整しない。
試験サイクル数
1サイクル以上
計量試験
小さな静的荷重でEUTを試験する。
大気圧の変化も考慮する。
EUTを一定の環境条件下で安定させる。一つの荷重又は擬似荷重において,次の事項
を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
最大許容変動
妨害が加わった場合と妨害なしの場合との差が,1目量(1 e)を超えないか,又はEUT
が有意な誤りを検出して対処しなければならない。
A.4.3.3 サージ試験
サージ試験は,JIS C 61000-4-5及び表A.11によって行う。
表A.11−サージ試験
環境現象
試験条件
試験設定
電源線並びにI/O線及び
通信線上のサージ
0.5 kV(ライン−ライン間)
1.0 kV(ライン−グラウンド間)
a) AC主電源線には,正極性サージ及び負極性サージを0°,90°,
180°及び270°の位相角で個々に3回以上印加する。
b) I/O信号,制御及びデータ線路の通信線には,正極性サージ及び
負極性サージを個々に3回以上印加する。
JIS C 61000-4-5
この試験は,一般的な設置状況に基づいて,サージによる重大な影響の危険性が予想される場合だけに適用する。
これは,屋外設置機器及び/又は長い信号線に接続した屋内設置機器(30 mより長いか,又はその長さにかかわら
ず部分的又は完全に屋外に設置した線路)に特に関連する。試験は,電源供給線並びにI/O信号線,データ及び制
御線に適用する。自動捕捉式はかりの電力がDC回路網から供給される場合は,DC主電源の自動捕捉式はかりにも
適用する。
試験手順の補助情報
試験目的
電源供給線,I/O回路及び信号線が高速過渡現象に個々に印加している間,小さな静
的荷重に対する表示が6.1.3の規定に適合していることを検証する。
試験手順
試験は,JIS C 61000-4-5に規定する高インピーダンス及び低インピーダンス負荷の出
力電圧・電流の立ち上がり時間,パルス幅,ピーク値,並びに二つの連続パルス間の
最小時間間隔のサージを印加することで行う。
結合回路は,サージを印加する線に依存し,JIS C 61000-4-5の規定による。
事前準備
要求なし
EUTの条件
試験装置は,EUTを接続する前に調整しておく。
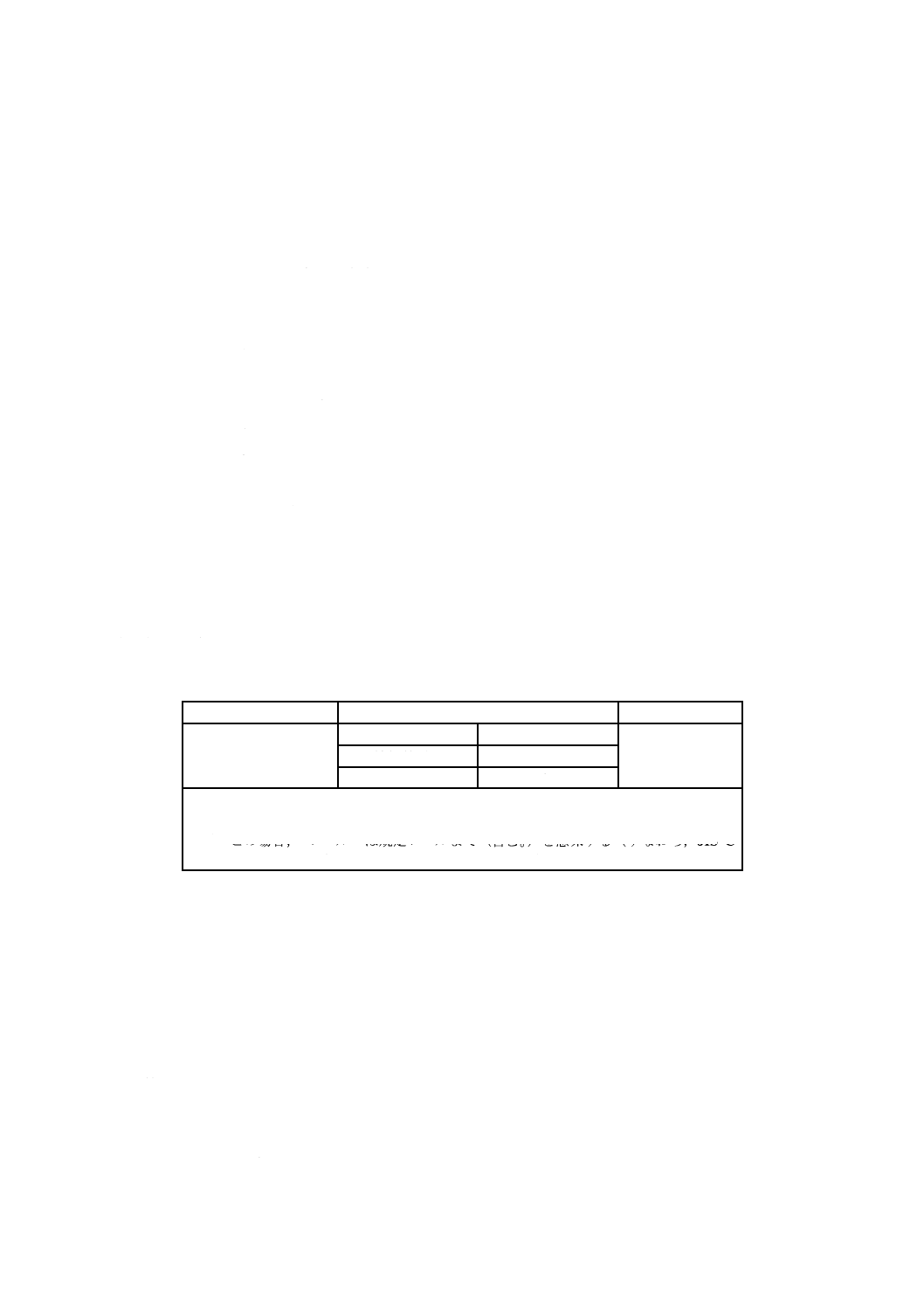
59
B 7607:2018
EUTを電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。試験前
に,EUTを可能な限りゼロ点付近に調整する。試験中はゼロ点設定装置を作動させず,
有意な誤りが発生した場合のリセットを除き,再調整しない。
試験サイクル数
1サイクル以上
計量試験
小さな静的荷重でEUTを試験する。
大気圧の変化も考慮する。
EUTを一定の環境条件下で安定させる。一つの荷重又は擬似荷重において,次の事項
を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
最大許容変動
妨害が加わった場合と妨害なしの場合との差が,1目量(1 e)を超えないか,又はEUT
が有意な誤りを検出して対処しなければならない。
A.4.3.4 静電気放電試験
静電気放電試験は,直接放電及び間接放電において,JIS C 61000-4-2及び表A.12によって行う。
表A.12−静電気放電試験
環境現象
試験条件
試験設定
静電気放電
試験電圧
レベル
JIS C 61000-4-2
接触放電a)
6 kV
気中放電
8 kV b)
注a) 接触放電は,導電性の接触可能部分に適用する。金属接点,例えば電池室又はコ
ンセントの金属接点は,この要件から除外されている。
b) この場合,“レベル”は規定レベルまで(含む。)を意味する(すなわち,JIS C
61000-4-2に規定する下位レベルにおいても行う。)。
直接放電においては,表A.12による接触放電又は気中放電のいずれかを行う。ただし,気中放電は表
A.12に規定する電圧以外の低い電圧でも試験を実施する。
接触放電は,望ましい試験方法である。きょう(筐)体のアクセス可能な金属部分を個々に,20回の放
電(正極で10回,負極で10回)を加える。連続した放電の時間間隔は,10秒以上とする。気中放電は,
接触放電を行えない場合に適用する。また,間接放電においては,JIS C 61000-4-2に規定するとおり水平
及び垂直結合板に接触放電を加える。
試験手順の補助情報
試験目的
電源供給線,I/O回路及び信号線が高速過渡現象に個々に印加する間,小さな静的荷
重に対する表示が,6.1.3の規定に適合することを検証する。
試験手順
要求なし
事前準備
要求なし
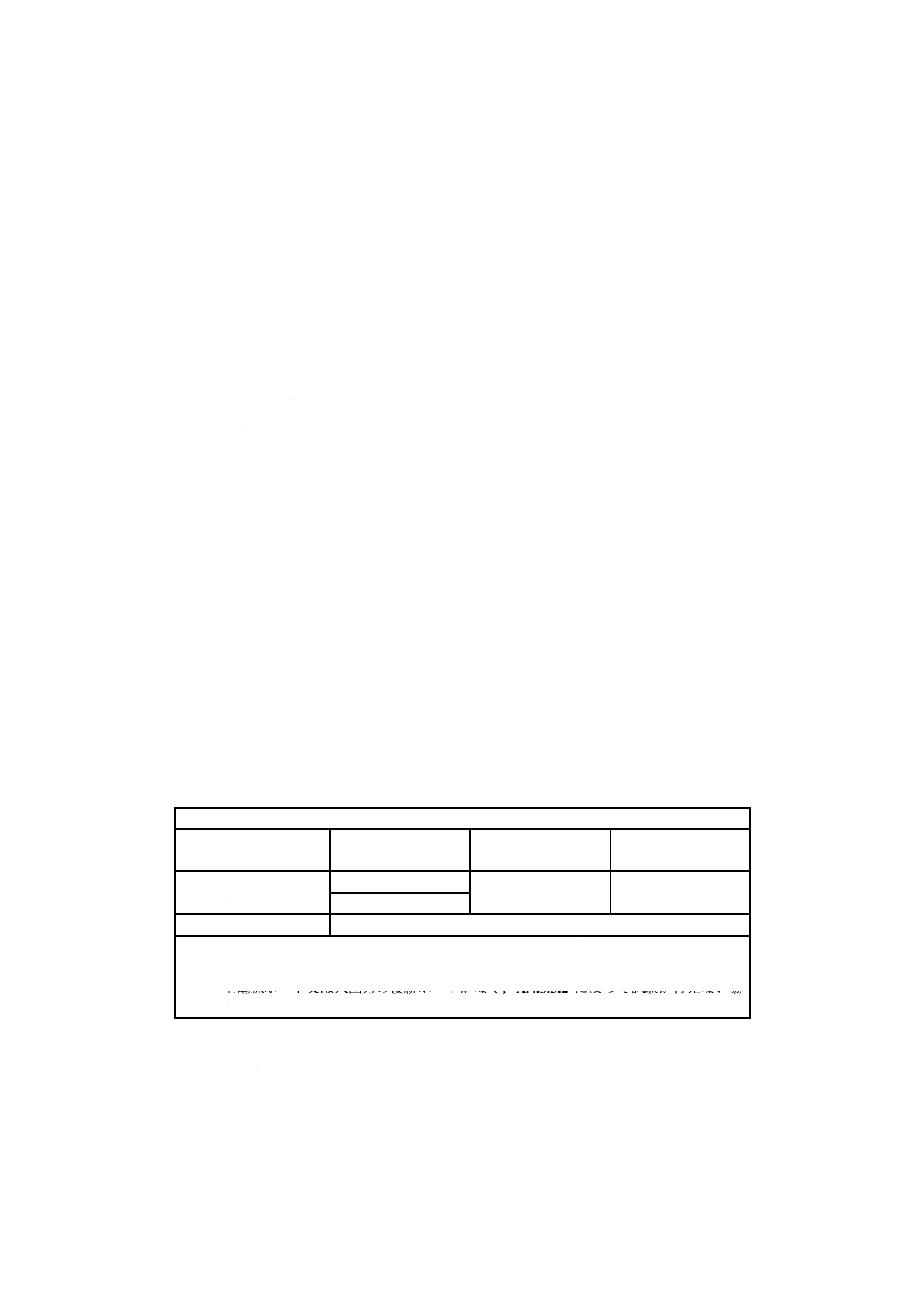
60
B 7607:2018
EUTの条件
試験装置は,EUTを接続する前に調整しておく。
EUTを電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。試験前
に,EUTを可能な限りゼロ点付近に調整する。試験中はゼロ点設定装置を作動させず,
有意な誤りが発生した場合のリセットを除き,再調整しない。
試験サイクル数
1サイクル以上
計量試験
小さな静的荷重でEUTを試験する。
大気圧の変化も考慮する。
EUTを一定の環境条件下で安定させる。一つの荷重又は擬似荷重において,次の事項
を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
最大許容変動
妨害が加わった場合と妨害なしの場合との差が,1目量(1 e)を超えないか,又はEUT
が有意な誤りを検出して対処しなければならない。
A.4.3.5 電磁イミュニティ試験
A.4.3.5.1 放射電磁界イミュニティ試験
試験は,JIS C 61000-4-3及び表A.13によって行う。
試験信号の非変調搬送波は,表示する試験値に調整する。試験を行うため,搬送波は更に規定のとおり
変調する。
表A.13−放射電磁界イミュニティ試験
試験条件
環境現象
周波数範囲
(MHz)
電界強度
(V/m)
試験設定
放射電磁界に対するイ
ミュニティ
80〜2 000 a)
10
JIS C 61000-4-3
26〜80 b)
変調
80 % AM,1 kHz正弦波
注a) JIS C 61000-4-3だけが80 MHzを超える試験レベルを規定している。より低い範囲
の周波数に対して,伝導無線周波数妨害に対する試験方法を推奨する(A.4.3.5.2)。
b) 主電源ポート又は入出力の接続ポートがなく,A.4.3.5.2によって試験が行えない場
合は,周波数範囲の下限は26 MHzとする。
試験手順の補助情報
試験目的
放射電磁界にさら(曝)されている間,小さな静的荷重に対する表示が,6.1.3の規定
に適合することを検証する。
試験手順
要求なし
事前準備
要求なし
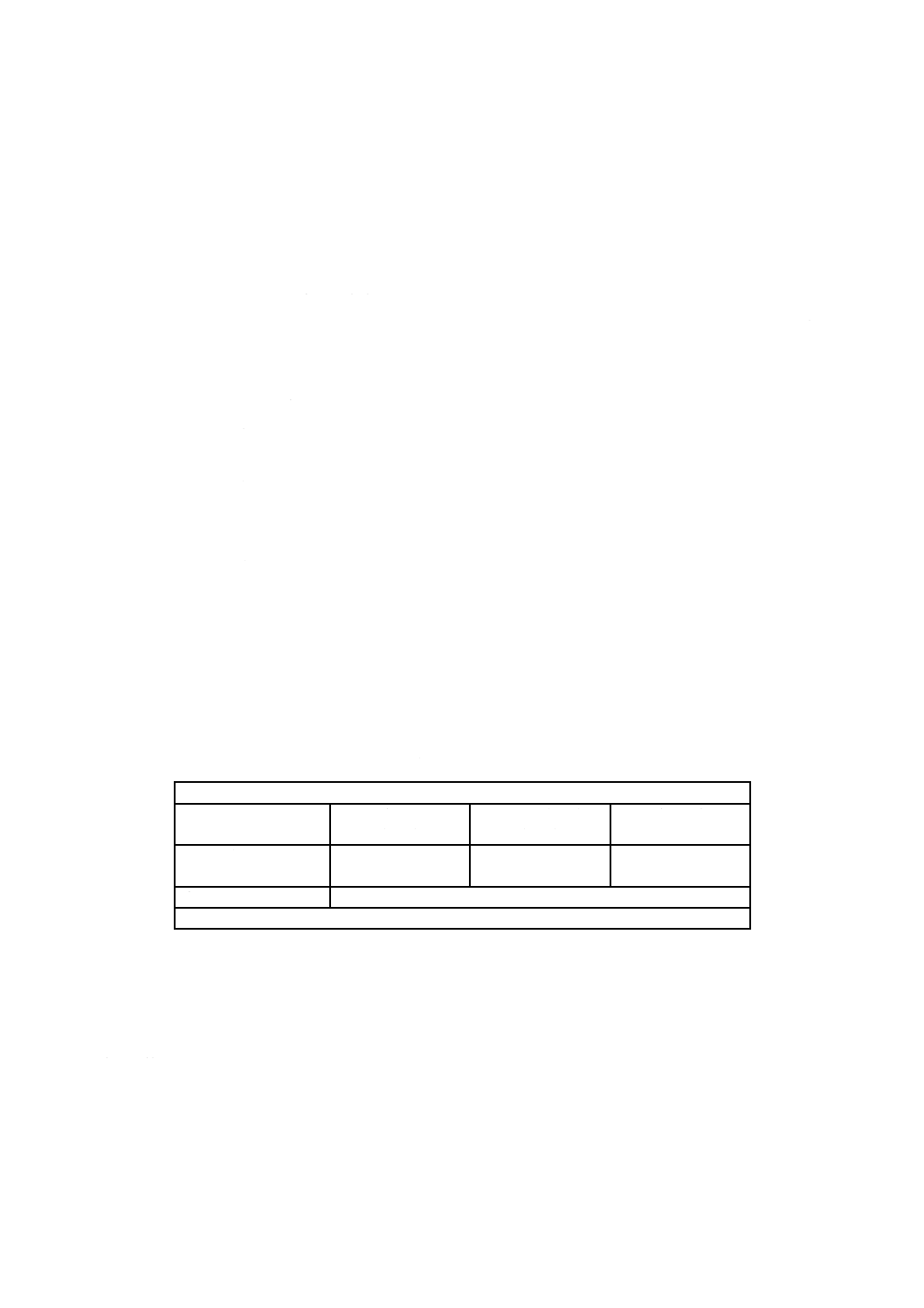
61
B 7607:2018
EUTの条件
試験装置は,EUTを接続する前に調整しておく。
EUTを電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。試験前
に,EUTを可能な限りゼロ点付近に調整する。試験中はゼロ点設定装置を作動させず,
有意な誤りが発生した場合のリセットを除き,再調整しない。
試験サイクル数
1サイクル以上
計量試験
小さな静的荷重でEUTを試験する。
大気圧の変化も考慮する。
EUTを一定の環境条件下で安定させる。一つの荷重又は擬似荷重において,次のデー
タを記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
最大許容変動
妨害が加わった場合と妨害なしの場合との差が,1目量(1 e)を超えないか,又はEUT
が有意な誤りを検出して対処しなければならない。
A.4.3.5.2 伝導無線周波電磁界イミュニティ
試験は,JIS C 61000-4-6及び表A.14によって行う。
試験信号の非変調搬送波は,表示する試験値に調整する。試験を行うため,搬送波は更に規定のとおり
変調する。
表A.14−伝導無線周波電磁界イミュニティ試験
試験条件
環境現象
周波数範囲
(MHz)
RF振幅(50 Ω)
(e.m.f)
試験設定
伝導無線周波数電磁界
イミュニティ
0.15〜80
10 V
JIS C 61000-4-6
変調
80 % AM,1 kHz正弦波
EUTに電源又はその他のポートがない場合,この試験は適用しない。
結合回路及び減結合回路は,EUTに接続した各種伝導ケーブルに妨害信号(全周波数範囲にわたり,定
義されたEUTポートにおけるコモンモードインピーダンスによって)を適切に結合するために使用しなけ
ればならない。
試験手順の補助情報
試験目的
伝導無線周波数電磁界にさら(曝)されている間,小さな静的試験荷重に対する表示
が,6.1.3の規定に適合していることを検証する。
試験手順
要求なし
事前準備
要求なし
EUTの条件
試験装置はEUTを接続する前に調整しておく。
62
B 7607:2018
EUTを電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。試験前
に,EUTを可能な限りゼロ点付近に調整する。試験中はゼロ点設定装置を作動させず,
有意な誤りが発生した場合のリセットを除き,再調整しない。
試験サイクル数
1サイクル以上
計量試験
小さな静的荷重でEUTを試験する。
大気圧の変化も考慮する。
EUTを一定の環境条件下で安定させる。一つの荷重又は擬似荷重において,次のデー
タを記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
最大許容変動
妨害が加わった場合と妨害なしの場合との差が,1目量(1 e)を超えないか,又はEUT
が有意な誤りを検出して対処しなければならない。
A.4.3.6 車両用電源駆動の自動捕捉式はかりに対する特別EMC要件
(この規格では,適用しない。)
A.5 スパン安定性試験(4.10及び7.5.3)
この試験は,精度等級XI及び精度等級Y(I)の自動捕捉式はかりには適用しない。
試験方法
スパン安定性
試験目的
EUTが性能試験を受けた後,7.5.3の規定に適合することを検証する。
参照規格
現在のところ,参照規格は存在しない。
試験手順概略
試験は,様々な間隔で十分に一定した大気条件(正常な試験所環境における合理的な
一定条件)の下でEUTの誤差変動を観察する。
試験は,EUTの該当する性能試験を受ける前,試験中及び試験後に十分に安定した周
囲条件(通常の屋内環境における十分に一定な状態)で,EUTの誤差の変動を観測す
る。
スパン安定性試験を実施する性能試験は,静的温度試験を含み,該当する場合は,高
温高湿(定常)試験を含む。この附属書に規定する他の性能試験を含んでもよい。
EUTは,主電源若しくは電池,又はその他の電源供給装置から試験期間に8時間以上
の遮断を2回行う。遮断回数は,製造業者が指定する場合,又は試験機関の判断で増
やしてもよい。
この試験の実施に当たっては,製造業者の操作指示書を配慮する。
EUTは,電源投入後5時間以上,十分に一定な周囲状態で安定させる。ただし,静的
温度試験及び高温高湿試験(定常)の後は16時間以上とする。
試験の厳しさ
試験継続期間28日間,又は性能試験を行うのに必要な期間のいずれか短い期間とす
63
B 7607:2018
る。
試験間隔時間tは0.5〜10日間とし,この試験の全継続期間での測定を公平に均等に
配分する。
試験荷重 ひょう量付近。試験期間中は,同じ試験荷重を使用する。
最大許容変動
全ての機能が正しく作動しなければならない。
表示誤差の変動は,n回測定の全てに使った試験荷重に対して,表6に規定する最大
許容誤差の絶対値の1/2を超えてはならない。
試験回数
8回以上。ただし,その傾向が落ち着くか若しくは逆になるまで,又はその誤差が最
大許容変動を超えるまで,追加の測定を行う。
事前準備
要求なし
試験設備
検証済みの分銅
EUTの条件
EUTを電源に接続して,製造業者が指定する予熱時間以上の間通電しておく。
試験前に,EUTを可能な限りゼロ点付近に調整する。試験中はゼロ点設定装置を作動
させず,有意な誤りが発生した場合のリセットを除き,再調整しない。
計量シーケンス
一定の標準条件下で安定させる。
大気圧の変化も考慮する。
静的試験荷重又は擬似荷重を使用し,次の事項を記録する。
a) 日時
b) 温度
c) 相対湿度
d) 電源電圧
e) 試験荷重
f)
表示(該当する場合)
g) 誤差
h) 機能性能
i)
試験場所の変化
最初の測定で,誤差の平均値を求めるため,更に4回ゼロ点設定及び荷重かけを速や
かに繰り返す。次の測定では,その結果が規定許容値外であるか,又は初期測定5回
の読みの範囲が0.1 eを超えている場合のいずれでもない場合,1回だけ行う。他の試
験を行う前には,EUTを完全に回復させる。
64
B 7607:2018
附属書JA
(規定)
取引又は証明用の自動捕捉式はかりの要求事項
JA.1 一般
この附属書は,取引又は証明に使用する自動捕捉式はかりの計量法上の要求事項について規定する。
JA.2 用語及び定義
この附属書に用いる主な用語及び定義は,箇条3によるほか,次による。ただし,箇条3の定義におい
て“誤差”とある場合は“器差”と,“最大許容誤差”とある場合は“検定公差”と読み替えて適用する。
また,本体及び附属書Aにおいて,この附属書が準用する規定中に“最大許容平均誤差”又は“最大許容
誤差”は“検定公差”に,“型式検査”は“型式承認試験”に,“受渡検査”は“検定”に,“計量関連”は
“法定計量関連”に読み替えて適用する。
JA.2.1
検定
計量法に規定される特定計量器の検査。
注記 検定を行う者は,計量法によってその特定計量器の種類ごとに都道府県知事,指定検定機関,
国立研究開発法人産業技術総合研究所又は日本電気計器検定所と定められている。
JA.2.2
検定公差
検定における器差の許容値。
JA.2.3
検定証印
検定に合格したことを示す証印。
JA.2.4
使用計量範囲
最小測定量からひょう量までの間の計量範囲内の,次のいずれかの範囲。
a) 自動捕捉式はかりの周辺装置の能力などによって制限されて,結果として実際に自動捕捉式はかりが
使用可能な計量範囲
b) 日常的にある特定質量の製品の計量にだけ使用する場合における,その最大質量と最小質量との間
JA.2.5
使用最大速度
自動捕捉式はかりの仕様上の荷重搬送システムの最大速度又は最大動作速度にかかわらない,次のいず
れかの速度。
a) 自動捕捉式はかりの周辺装置の能力などによって制限されて,結果として実際に自動捕捉式はかりが
搬送可能な最大動作速度
b) 日常的にある特定質量の製品の計量にだけ使用する場合における,その製品に関連付けられた最大動
作速度
65
B 7607:2018
JA.2.6
個々に定める性能の技術上の基準及び検定の方法
型式承認表示を付している自動捕捉式はかりであっても省略することなく全数構造検定を行う性能の基
準及び検定の方法。
JA.3 検定
JA.3.1 構造に係る技術上の基準
JA.3.1.1 表記
表記は,5.11による。ただし,5.11.1のa)〜c)は次のa)〜c)に置き換え,d)〜g)も適用する。5.11.4にお
ける“製造業者名又は商標”はa)に,“型式”はe)に,“器物番号”はc)に読み替えて適用する。
a) 製造事業者名,製造事業者の登録商標又は経済産業大臣に届け出た記号
b) 輸入事業者名,輸入事業者の登録商標又は経済産業大臣に届け出た記号(該当する場合)
c) 製造番号
d) 製造年
e) 型式承認表示(該当する場合)
f)
“特殊の計量”に使用する場合は,その旨。
g) 格付はかりの場合は,その旨。
h) 使用計量範囲(該当する場合)
i)
使用最大速度(該当する場合)
注記 h)又はi)を超えて使用する場合は,JD.4 d)に留意する。
JA.3.1.2 性能
性能は,箇条4〜箇条6(5.11を除く。)による。ただし,5.2.6及び5.4.5の封印の規定中“封印するこ
とが望ましい”は,“封印しなければならない”として適用する。
JA.3.1.3 個々に定める性能の技術上の基準
個々に定める性能の技術上の基準は,次による。ただし,使用方法が限定されていて性能の確認が不要
と判断できる基準(例えば,日常的に同じ計量位置でだけ使用する場合の偏置荷重の影響の基準)は,適
用しなくてもよい。
a) 最大許容標準偏差は,4.5.1.1.2による(カテゴリXだけ適用する。)。
b) 動補正の範囲は,5.2.3による。
c) ゼロ点設定精度は,5.5.2による。
d) 風袋引き装置の精度は,5.6.2による。
e) 偏置荷重の影響は,4.8.1による。
f)
代替動作速度は,4.5及び7.1.4による。ただし,プリセット速度の規定は除く。
g) 平衡安定性は,5.4.1による(静的計量はかりだけ適用する。)。
h) 表示装置及び印字装置の一致は,4.8.2による。
i)
構成部品及びプリセット制御の保護は,5.2.6による。
JA.3.2 検定公差
検定公差は,カテゴリXについては4.5.1.1.1に,カテゴリYについては4.5.1.2による。
66
B 7607:2018
JA.3.3 構造検定の方法
JA.3.3.1 一般
構造検定の方法は,箇条7,箇条8及び附属書Aによる。ただし,次の規定を優先する。
a) 試験荷重及び試験計量回数は,7.1.2,7.1.3及びA.3.1.1に従い,実材料を用いて試験計量回数を連続
計量することを原則とする。ただし,実材料を使用した試験ができない場合には,適切な擬似材料を
用いてもよいが,実材料に近い寸法及び重心となるように配慮する。
b) 現地において自動捕捉式はかりの計量範囲全体にわたって検定を行うことができない場合は,使用計
量範囲で検定を行ってもよい。その場合は,この附属書が準用する本体及び附属書Aに規定する試験
荷重については,次のとおりとする。
− “最小測定量”は“使用計量範囲の下限値”に,“ひょう量”は“使用計量範囲の上限値”と読み替
える。
− 7.1.1のただし書きにおいて,任意の試験荷重は追加しなくてもよい。
c) 荷重搬送システムの最大速度及び最大動作速度は,使用最大速度としてよい。
d) 8.3.1の試験場所の規定にかかわらず,自動捕捉式はかりの使用状態で検定が可能であれば,自動捕捉
式はかりの検定場所は,製造事業者の工場でもよい。ただし,自動捕捉式はかりの使用場所の重力加
速度の影響により変化する質量表示の補正値(ΔWgra)を次の式によって算出し,はかりの表示値に加
えて行う。
W
W
×
−
=
2
2
1
gra
Δ
g
g
g
ここに, ΔWgra: 重力加速度の影響により変化する質量表示の補正値
g1: 使用場所の重力加速度(m/s2)1)
g2: 検定を行う場所の重力加速度(m/s2)1)
W: 試験荷重に相当する質量2)
注1) 使用場所及び検定を行う場所の重力加速度は,実測するか,又は国土交通省国土地理院が提
供する重力データなどから推定してもよい。
2) 単位は,はかりの表示値の単位に合わせ,g,kg,tなどを使用する。
JA.3.3.2 個々に定める性能の検定の方法
個々に定める性能の検定の方法は,次による。
a) 最大許容標準偏差は,A.3.1.1による(カテゴリXだけ適用する。)。
b) 動補正の範囲は,A.3.3による。
c) ゼロ点設定精度は,A.3.4.3による。
d) 風袋引き装置の精度は,A.3.6.2による。
e) 偏置荷重の影響は,A.3.7による。ただし,適用される試験荷重が使用計量範囲の下限値未満である場
合は,試験荷重は使用計量範囲の下限値とする。
f)
代替動作速度は,A.3.8による。ただし,プリセット速度の規定は除く。
g) 平衡安定性は,A.3.9による(静的計量はかりだけ適用する。)。
h) 表示装置及び印字装置の一致は,A.3.10による。
i)
構成部品及びプリセット制御の保護は,A.3.11による。
67
B 7607:2018
JA.3.4 器差検定の方法
JA.3.4.1 器差検定に使用する器具
器差検定に使用する器具は,7.1.5.1によらず,附属書JCによる。
JA.3.4.2 一般
器差検定の方法は,A.3.1.1によるほか,JA.3.3.1のa)〜d)による。
JA.3.5 検定後の分解等に関する留意事項
個々に定める性能の検定及び器差検定を行った後に,自動捕捉式はかりを使用場所に移動するために計
量性能に影響を及ぼす分解及び/又は解体を行ってはならない。
JA.3.6 検定後の移動に関する留意事項
個々に定める性能の検定及び器差検定を行った後の,自動捕捉式はかりの移動は,器差及び性能に影響
を及ぼさない範囲までとする。
JA.3.7 精度等級に関する特例
初回の検定に限り,検定において不適合となった場合,使用者が下位の精度等級において引き続き取引
又は証明に使用することを希望する場合,適合する精度等級での使用が認められる。
注記 検定において試験に使用した試験荷重が著しく不安定な場合,又は形状,材質などが異なる場
合,型式承認試験において承認された精度等級における初回検定時の要求事項に適合しない場
合がある。
JA.4 既に使用されている自動捕捉式はかり(平成34年3月31日以前から検定証印が付されていない状
態で取引又は証明における法定計量単位による計量に使用されている自動捕捉式はかり)の検定
JA.4.1 構造に係る技術上の基準
JA.4.1.1 表記
自動捕捉式はかりには,読みやすく,鮮明,かつ,消滅しないように見やすい箇所に次を表示すること
が望ましい。ただし,表記に替えて,仕様書,取扱説明書,点検記録簿,タグなどによって明示してもよ
い。
a) 製造事業者名,製造事業者の登録商標又は経済産業大臣に届け出た記号
b) 製造番号
c) 最大動作速度(例えば,…荷重/分又はパック/分)(該当する場合)
d) 荷重搬送システムの最大速度(… m/s又はm/min)(該当する場合)
e) 使用計量範囲(該当する場合)
f)
使用最大速度(該当する場合)
注記 c)の表記は,d)の荷重搬送システムの最大速度及び設定可能な製品の寸法等から推定される最
大動作速度である場合がある。
JA.4.1.2 記号で表示する表記事項
自動捕捉式はかりには次の事項を記号で表示又は明示することが望ましい。
− 精度等級の表示,例えば,XI(0.5)又はY(a)
− 検査目量(e)3)
− 実目量(d)
− ひょう量(Max .....)
− 最小測定量(Min .....)
68
B 7607:2018
− 最大加算風袋量(T=+.....)
− 最大減算風袋量(T=−.....)
注3) 既に使用されている自動捕捉式はかりの検査目量(e)は,実際の表示目量とは異なってもよ
い。初回検定時において検査目量(e)が定まっていない場合,検定の実施機関は自動捕捉式
はかりの使用者と検査目量(e)について協議し決定する場合もある。
JA.4.1.3 性能
性能は,次による。
a) 最大許容標準偏差は,4.5.1.1.2による(カテゴリXだけ適用する。)。
b) ゼロ点設定精度は,ゼロ点設定後の計量結果に対するゼロ点の偏差が,目量(e)の1/2(0.5 e)を超
えてはならない。
JA.4.2 検定公差
検定公差は,JB.3.2による。
JA.4.3 構造検定の方法
JA.4.3.1 一般
次の規定を適用する。
a) 試験荷重及び試験計量回数は,JA.3.3.1 a)による。
b) 計量範囲は,JA.3.3.1 b)による。
c) 動作速度は,JA.3.3.1 c)による。
JA.4.3.2 検定の方法
構造検定の方法は,次による。
a) 最大許容標準偏差は,A.3.1.1による(カテゴリXだけ適用する。)。
b) ゼロ点設定精度は,ゼロ点設定装置を作動させ,表示によって確認する。
JA.4.4 器差検定の方法
器差検定は,JA.3.4による。
JA.4.5 検定後の分解等に関する留意事項
JA.3.5による。
JA.4.6 検定後の移動に関する留意事項
JA.3.6による。
JA.4.7 精度等級に関する特例
JA.3.7による。
JA.5 使用中検査
使用中検査は,附属書JBによる。
JA.6 修理
修理は,附属書JDによる。
JA.7 対応関係
JIS項目と特定計量器検定検査規則(以下,検則という。)項目との対応関係は,表JA.1による。
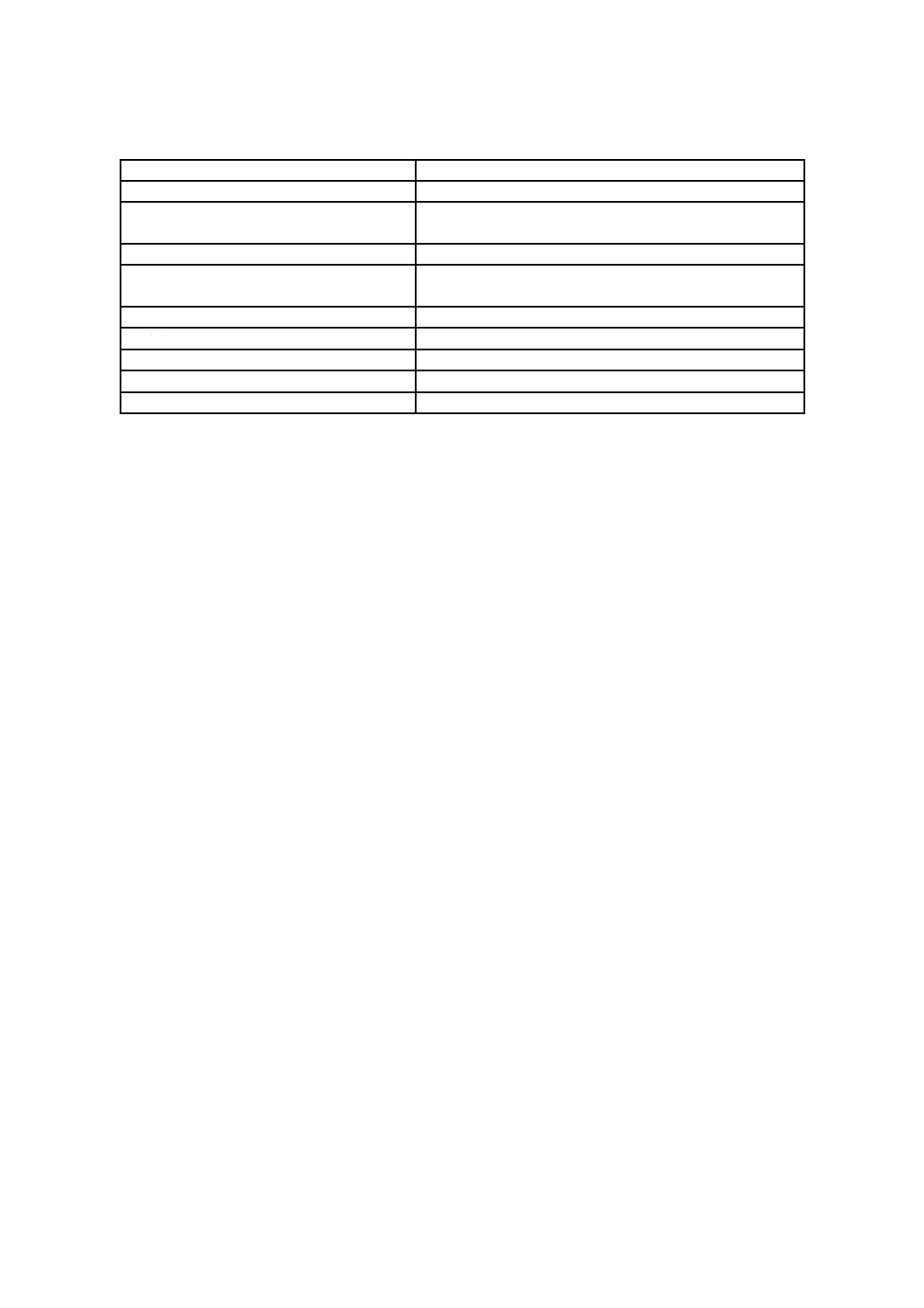
69
B 7607:2018
表JA.1−JIS項目と検則項目との対比表
JIS項目
検則項目
JA.3.1.1 表記
第3章第1節第1款第1目 “表記事項”
JA.3.1.2 性能
JA.3.1.3 個々に定める性能の技術上の基準
第3章第1節第1款第3目 “性能”
JA.3.2 検定公差
第3章第1節第2款 “検定公差”
JA.3.3 構造検定の方法
JA.3.3.2 個々に定める性能の検定の方法
第3章第1節第3款第1目 “構造検定の方法”
JA.3.4 器差検定の方法
第3章第1節第3款第2目 “器差検定の方法”
JB.3.1 性能に係る技術上の基準
第3章第2節第1款 “性能に係る技術上の基準”
JB.3.2 使用公差
第3章第2節第2款 “使用公差”
JB.3.3 性能に関する検査の方法
第3章第2節第3款第1目 “性能に関する検査の方法”
JB.3.4 器差検査の方法
第3章第2節第3款第2目 “器差検査の方法”
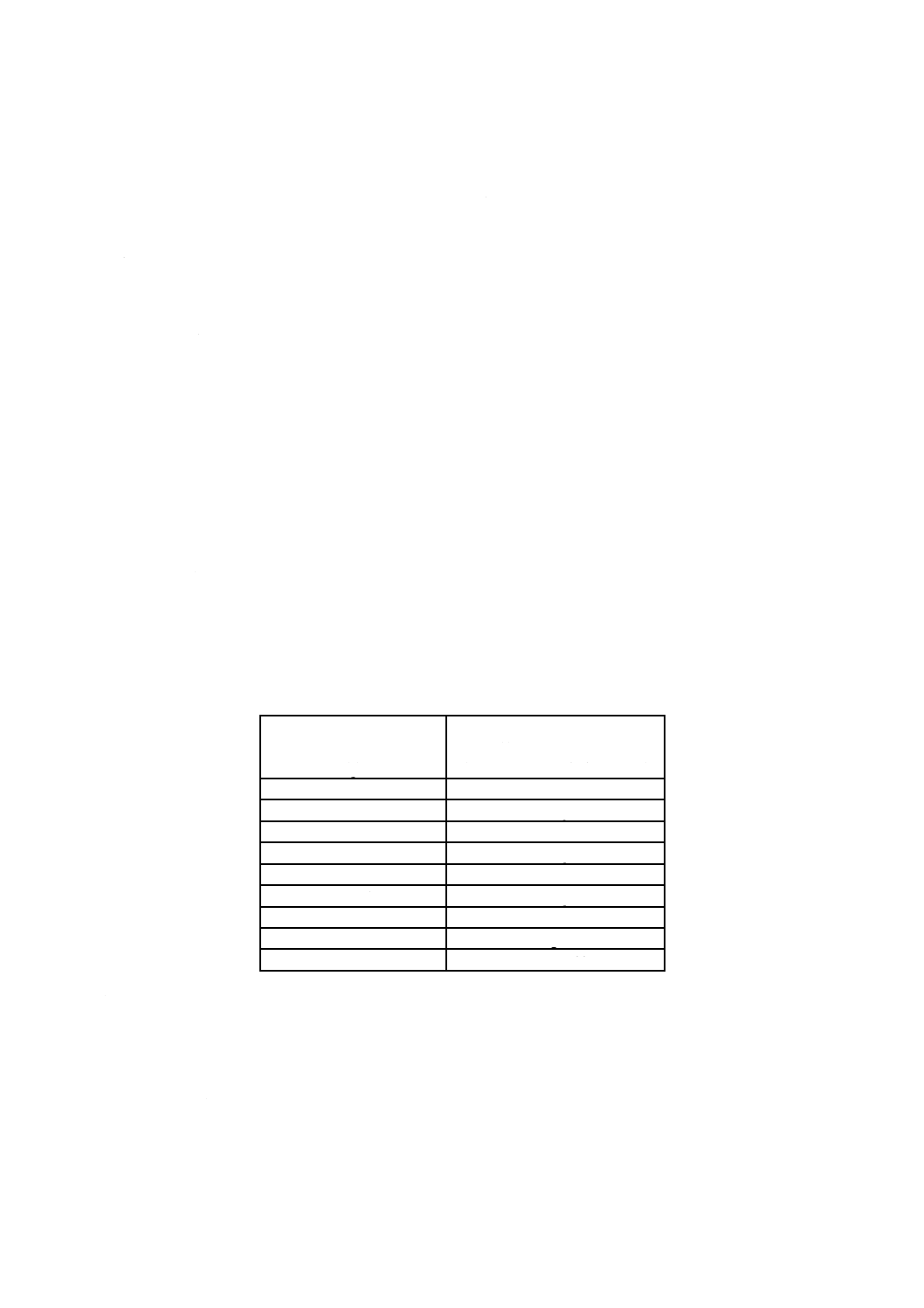
70
B 7607:2018
附属書JB
(規定)
使用中検査
JB.1 一般
この附属書は,取引又は証明に使用する自動捕捉式はかりの使用中検査について規定する。
JB.2 用語及び定義
この附属書に用いる主な用語及び定義は,箇条3及びJA.2によるほか,次による。ただし,箇条3の定
義において“最大許容誤差”とある場合は“使用公差”と読み替えて適用する。また,本体及び附属書A
において,この附属書が準用する規定中に“最大許容平均誤差”又は“最大許容誤差”とある場合は,“使
用公差”と読み替えて適用する。
JB.2.1
使用公差
使用中検査における器差の許容値。
JB.3 使用中検査
JB.3.1 性能に係る技術上の基準
性能の技術上の基準は,JA.3.1.1及びJA.3.1.2によるほか,次による。
a) 最大許容標準偏差は,表JB.1に等級指定係数(x)を乗じた値とする(カテゴリXだけ適用する。)。
表JB.1−最大許容標準偏差
質量
(g)
等級指定係数(x)=1に対する
最大許容標準偏差
(%はmに対する割合を表す。)
m≦50
0.6 %
50<m≦100
0.3 g
100<m≦200
0.3 %
200<m≦300
0.6 g
300<m≦500
0.2 %
500<m≦1000
1.0 g
1000<m≦10000
0.1 %
10000<m≦15000
10 g
15000<m
0.067 %
b) ゼロ点設定精度は,ゼロ点設定後の計量結果に対するゼロ点の偏差が,目量(e)の1/2(0.5 e)を超
えてはならない。
c) 代替動作速度は,4.5及び7.1.4による。ただし,プリセット速度の規定は除く。
JB.3.2 使用公差
使用公差は,JB.3.2.1及びJB.3.2.2による。
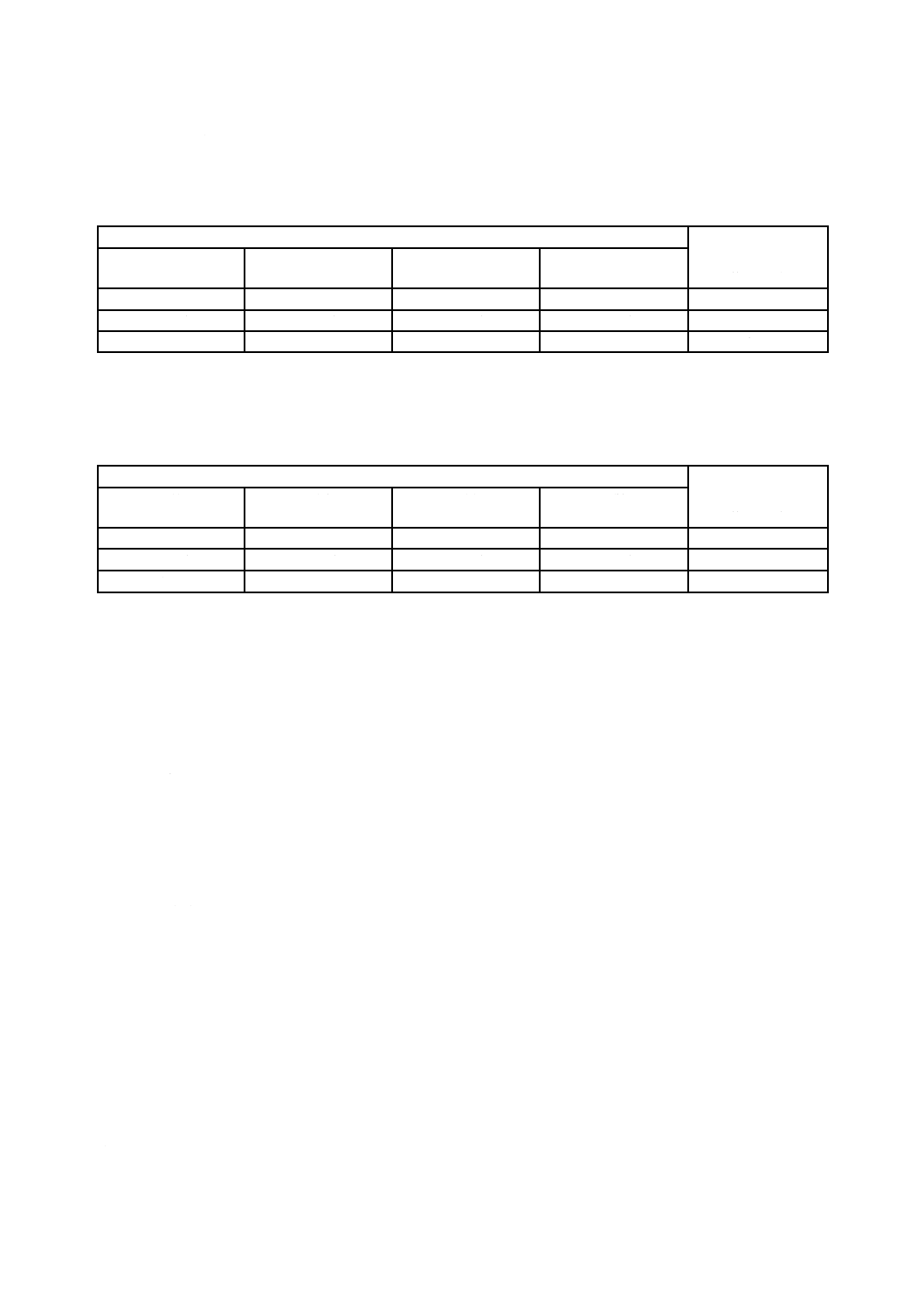
71
B 7607:2018
JB.3.2.1 カテゴリXの自動捕捉式はかり
使用公差は,表JB.2による。
表JB.2−カテゴリXの使用公差
目量(e)で表した質量(m)
カテゴリXの自動
捕捉式はかりの
使用公差
XI
XII
XIII
XIIII
0≦m≦50000
0≦m≦5000
0≦m≦500
0≦m≦50
±1 e
50000<m≦200000
5000<m≦20000
500<m≦2000
50<m≦200
±2 e
200000<m
20000<m≦100000
2000<m≦10000
200<m≦1000
±3 e
JB.3.2.2 カテゴリYの自動捕捉式はかり
使用公差は,表JB.3による。
表JB.3−カテゴリYの使用公差
目量(e)で表した質量(m)
カテゴリYの自動
捕捉式はかりの
使用公差
Y(I)
Y(II)
Y(a)
Y(b)
0≦m≦50000
0≦m≦5000
0≦m≦500
0≦m≦50
±1.5 e
50000<m≦200000
5000<m≦20000
500<m≦2000
50<m≦200
±2.5 e
200000<m
20000<m≦100000
2000<m≦10000
200<m≦1000
±3.5 e
JB.3.3 性能に関する検査の方法
JB.3.3.1 一般
次の規定を適用する。
a) 試験荷重及び試験計量回数は,JA.3.3.1 a)による。
b) 計量範囲は,JA.3.3.1 b)による。
c) 動作速度は,JA.3.3.1 c)による。
JB.3.3.2 検査の方法
性能に関する検査の方法は,次による。
a) 最大許容標準偏差は,A.3.1.1による(カテゴリXだけ適用する。)。
b) ゼロ点設定精度は,ゼロ点設定装置を作動させ,表示によって確認する。
c) 代替動作速度は,A.3.8による。ただし,プリセット速度の規定は除く。
JB.3.4 器差検査の方法
器差検査の方法は,JA.3.4による。ただし,JA.3.4において“器差検定”とある場合は“器差検査”と
読み替えて適用する。また,JA.3.4.1が引用する附属書JCにおいて“検定公差”とある場合は“使用公差”
と読み替えて適用する。
JB.4 既に使用されている自動捕捉式はかり(平成34年3月31日以前から検定証印が付されていない状
態で取引又は証明における法定計量単位による計量に使用されている自動捕捉式はかり)の使用中検査
JB.4.1 性能に係る技術上の基準
性能の技術上の基準は,JA.4.1.1及びJA.4.1.2によるほか,次による。
a) 最大許容標準偏差は,JB.3.1 a)による(カテゴリXだけ適用する。)。
72
B 7607:2018
b) ゼロ点設定精度は,JB.3.1 b)による。
JB.4.2 使用公差
使用公差は,JB.3.2による。
JB.4.3 性能に関する検査の方法
性能に関する検査の方法は,JB.3.3.1によるほか,次による。
a) 最大許容標準偏差は,JB.3.3.2 a)による(カテゴリXだけ適用する。)。
b) ゼロ点設定精度は,JB.3.3.2 b)による。
JB.4.4 器差検査の方法
器差検査の方法は,JB.3.4による。
73
B 7607:2018
附属書JC
(規定)
検定に使用する器具
JC.1 一般
この附属書は,取引又は証明に使用する自動捕捉式はかりの検定に使用する器具について規定する。
JC.2 基準分銅
基準分銅は,計量法第103条の規定によって基準器検査に合格し,かつ,有効期間内になければならな
い。また,その器差が検定公差の1/3以内でなければならない。
JC.3 実用基準分銅
実用基準分銅は,JIS B 7611-2のJA.1.1 b)に規定するもので,その器差が検定公差の1/3以内でなけれ
ばならない。
JC.4 管理はかり
JC.4.1 基準はかり
基準はかりは,計量法第103条の規定によって基準器検査に合格し,かつ,有効期間内になければなら
ない。また,次の規定に適合しなければならない。
a) 器差が検定公差及び最大許容標準偏差のいずれか小さい方の1/3以内でなければならない。
b) 目量の1/10又は感量の1/10が,検査箇所における検定公差の値の1/5以下でなれけばならない。
基準はかりを管理はかりとして検定に使用する場合,計量値の決定のために,基準分銅及び実用基準分
銅(以下,基準分銅等という。)による比較は行わなくてよい。
JC.4.2 基準はかり以外のはかり
基準はかり以外のはかりを管理はかりとして使用する場合,次の規定に適合しなければならない。
a) 目量又は実目量(アナログ指示のはかりにあっては,目量の1/10又は感量の1/10)が,検査箇所にお
ける検定公差の値の1/5以下でなければならない。ただし,検定を行う自動捕捉式はかりを,一体型
管理はかりとして質量の比較に使用する場合などで,目量の補間を追加荷重によって行う場合には,
その補間が可能な桁数において,検査箇所における検定公差の値の1/5以下であればよい。
b) 検定を行う範囲内の任意の箇所における同一荷重による10回の計量結果の間の差は,その荷重に対す
る検定公差の1/5以下でなければならない。
基準はかり以外のはかりを用いて計量値を決定する場合,検定を行う箇所において,基準分銅等を用い
て表示値の誤差を算出し,それを補正して質量を決定しなければならない。
JC.5 使用する物品及び役務等の供出等
検定及び検査に使用する実材料及び擬似材料の準備及び使用後の処理,管理はかり及び試験荷重の搬送
に使用する機器等について,検査を行う機関は申請者に対してこれらの供出を依頼することができる。
74
B 7607:2018
附属書JD
(規定)
自動捕捉式はかりの修理
JD.1 一般
この附属書は,自動捕捉式はかりの計量法上の修理について規定する。
自動捕捉式はかりを修理する場合,軽微な修理及び簡易修理は検定証印等を除去しなくてもよい。ただ
し,それ以外の修理は計量法第49条によって,検定証印を除去しなければならない。
修理は,失った性能及び構造を元どおり原状回復させる行為である。修理によって新たな機能を追加又
は除去してはならない。
JD.2 軽微な修理
計量法施行規則第10条の修理(軽微な修理)は,届出製造事業者及び届出修理事業者以外の者も封印を
除去することなくできる,計量性能に影響を及ぼすおそれがない修理とする。該当する修理は,次による。
a) 外装
1) 風防,キャップ,蓋及び水平調整ねじなど,破損,汚染,紛失しやすい外装部品の交換又は修理
2) 表示装置の表面保護シートなど,衛生管理上交換を推奨する部品の交換
3) シール材,保護材,パッキン及びクランプ用ゴムなど,経年劣化しやすい部品の交換又は修理
4) 軸受け及びベアリングなど,摩耗劣化しやすい部品の交換又は修理
b) 消耗品
1) ラベル用紙,印字用紙及び印字ヘッドなどの消耗品の交換
c) 搬送
1) 搬送ベルト,搬送ガイド,パスライン高さ変更及び物体検知センサなど,製品搬送にかかる部品の
交換又は修理
2) 選別装置の部品交換又は修理
d) 電源・電装
1) キーボード及び外部入出力装置などの周辺装置の交換又は修理
2) 周辺装置との入出力にかかるケーブルなどの交換又は修理
3) タイマ及びリレーなどの交換又は修理
4) ヒューズなどの保安部品の交換又は修理
5) 電池,ACアダプター,電源ケーブル,電源スイッチなどの電子基盤の交換を必要としない部品の
交換又は修理
e) その他
1) 外部記憶装置,印字装置など,計量結果の後続使用に使用される装置の交換又は修理
2) 印字内容の変更など,計量結果の後続使用に影響する内容の変更
3) 荷重受け部,搬送ベルトなどの清掃
JD.3 簡易修理
計量法施行規則第11条の修理(簡易修理)は,届出製造事業者,届出修理事業者又は適正計量管理事業
75
B 7607:2018
所が封印を除去することなくでき,計量性能に影響を及ぼすが器差に直接影響を及ぼすおそれがない修理
とする。該当する修理は,次による。簡易修理後は,計量法第49条第1項のただし書きの規定によって,
附属書JBによる検査を行い,性能が技術上の基準に適合し,かつ,器差が使用公差を超えないことを確
認しなければならない。
a) 搬送装置及び選別装置の交換等の処理能力に影響を及ぼす部分の交換又は修理
b) 表示装置の交換又は修理
c) 構造支持体の交換又は修理
d) 駆動モータ,搬送ローラ,プーリ,駆動部カップリング及びモータドライバの交換又は修理
e) JD.4以外の交換及び修理
JD.4 修理
軽微な修理及び簡易修理に属さない修理は,次による。修理後は再度検定を受けなければならない。
a) 荷重受け部,ロードセルなど,質量検出にかかる部分の交換又は修理
b) アナログ/デジタル変換器の交換又は修理
c) 封印の除去を伴う修理(例えば,スパンの調整,法定計量関連ソフトウェアの変更)
d) 使用計量範囲[JA.3.1.1 h),JA.4.1.1 e)]又は使用最大速度[JA.3.1.1 i),JA.4.1.1 f)]の変更
注記 使用計量範囲又は使用最大速度で検定を行うことは,製造時の計量範囲を使用実態に即した範
囲に変更することである。これを超えて使用することは,製造時の計量範囲から逸脱しない範
囲内に変更することであるため,原状回復である修理と解釈することができる。
76
B 7607:2018
附属書JE
(参考)
JISと対応国際規格との対比表
JIS B 7607:2018 自動捕捉式はかり
OIML R 51-1:2006,Automatic catchweighing instruments. Part 1: Metrological and
technical requirements−Tests
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲 自動捕捉式はかりの適用
範囲
1.2
JISと同じ。
変更
国際規格の適用範囲に含まれる機
種が多岐に渡り,国内でこの規格に
含まれるべき機種の絞込みを,製造
及び使用の実態も考慮し検討した
結果,適用範囲を3機種に限定し
た。
3機種以外のこの規格に含まれない機
種については,もともと国内では別の
呼称で分類されているうえに,この規
格の基準になじまないものであるた
め,変更した。
2 引用規格
−
−
追加
この規格で引用する規格を追加し
た。
対応国際規格にないため,追加した。
技術的差異はない。
3 用語及び
定義
3.1.3 自動捕捉式はかり
JISとほぼ同じ。
変更
3.1.3 適用範囲の変更に伴い,自動
捕捉式はかりの定義は対象とする3
機種の総称とした。
箇条1と同じ。
3.1.7 管理はかり
追加
3.1.7 管理はかりの略称を追記し
た。
呼称の追加であり,技術的差異はな
い。
3.1.9 計量当局
変更
3.1.9 用語“計量当局”を用いない
ため“適用しない。”とした。
取引証明に使用されない一般製品に
対する規定であるため,この用語を適
用していない。
3.3.2.0A 計量値
追加
国内法(計量法)で器差の算出根拠
として使用している定義を追加し
た。
対応国際規格にないため,追加した。
技術的差異はない。
3.3.5 感度
変更
3.3.5 “感度”はこの規格では使用
していないため,“適用しない”こ
ととした。
定義の有無だけであり,技術的差異は
ない。
3
B
7
6
0
7
:
2
0
1
8
77
B 7607:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
4 計量要件 4.1 精度等級
2.1
JISとほぼ同じ。
変更
4.1 カテゴリXにおけるOIML R
87の規定は国内では対象外のため,
削除した。また,適用範囲の変更に
伴い,カテゴリYも2機種だけと
した。
国内では商品量目制度があり,OIML
R 87を採用していないため,規定は不
要である。カテゴリYの限定について
は,箇条1と同じ。
4.2 自動捕捉式はかりの
分類
2.2
JISと同じ。
一致
−
−
4.3 多目量はかりに対す
る追加要件
2.3
JISと同じ。
一致
−
−
4.4 補助表示装置
2.4
JISと同じ。
一致
−
−
4.5 最大許容(平均)誤差
及び最大許容標準偏差
2.5
JISとほぼ同じ。
変更
使用中のはかりに適用する最大許
容誤差及び最大許容標準偏差を附
属書JBに示した。また,カテゴリ
Xの最大許容平均誤差と最大許容
標準偏差を,附属書から個別に引用
する必要があることから,細分箇条
とした。
構成の変更だけで,技術的差異はな
い。
4.6 影響因子試験に対す
る最大許容誤差
2.6
JISと同じ。
一致
−
−
4.7 計量単位
2.7
JISとほぼ同じ。
追加
法定計量単位として認められてい
る単位を追加した。
国内において法令で使用が認められ
ている単位であるため,対策は不要で
ある。
4.8 結果間の許容差
2.8
JISと同じ。
一致
−
−
4.9 影響因子
2.9
JISと同じ。
一致
−
−
4.10 スパン安定性
2.10
JISと同じ。
一致
−
−
4.11 試験目的のための表
示及び印字(自動運転の場
合)
2.11
JISと同じ。
一致
−
−
3
B
7
6
0
7
:
2
0
1
8
78
B 7607:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
5 技術要件 5.1 用途への適合
3.1
JISと同じ。
一致
−
−
5.2 動作の安全保護
3.2
JISとほぼ同じ。
削除
5.2.5 適用範囲の変更に伴い,適用
から外れる機種に対する規定であ
るため削除した。
箇条1と同じ。
変更
5.2.6 封印規定を緩和した。
取引証明に使用されない一般製品に
対する規定であるため,必須でない。
5.3 計量結果の表示
3.3
JISと同じ。
一致
−
−
5.4 デジタル表示装置,印
字装置及びデータ保存装
置
3.4
JISとほぼ同じ。
削除
5.4.5 ソフトウェア文書のa)〜f)ま
で削除した。
この規格では,文書類は必須でないた
め削除した。
変更
5.4.5 ソフトウェアの封印規定を
緩和した。
取引証明に使用されない一般製品に
対する規定であるため,封印規定は望
ましいとした。
5.5 ゼロ点設定装置及び
ゼロトラッキング装置
3.5
JISと同じ。
変更
自動ゼロ点設定装置の動作説明を
検査報告書の記載することを要求
から推奨に変更した。
−
5.6 風袋引き装置
3.6
JISと同じ。
一致
−
−
5.7 プリセット風袋引き
装置
3.7
JISとほぼ同じ。
変更
5.7.3 プリセット風袋量の印字要
件から計量値付け機を適用除外と
した。
非自動はかりに関するOIML R 76及
びJIS B 7611と整合させ,国内の運用
統一を優先した。
5.8 複目量はかりの計量
範囲の選択
3.8
JISと同じ。
一致
−
−
5.9 荷重受け部,荷重計量
装置及び荷重伝達装置の
選択装置又は切換装置
3.9
JISと同じ。
一致
−
−
5.10 質量ラベル貼付機又
は計量値付け機
3.10
JISと同じ。
一致
−
−
5.11 表記
3.11
補助表記
削除
5.11.3 補助表記の記載は削除し
た。
取引証明に使用されない一般製品に
対して不要な規定であるため,削除し
た。
5.12 検定証印
3.12
検定証印
削除
5.12 検定証印の記載は削除した。 5.11.3と同じ。
3
B
7
6
0
7
:
2
0
1
8
79
B 7607:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
6 電気式は
かりの要件
6.1 一般要件
4.1
JISとほぼ同じ。
一致
−
−
6.2 機能要件
4.2
JISと同じ。
変更
6.2.4 インタフェースの封印を要
求から推奨に変更した。
5.2.6と同じ。
7 試験方法 7.1 自動運転
6.1
JISとほぼ同じ。
一致
−
−
7.2 非自動(静的)運転
6.2
JISとほぼ同じ。
一致
−
−
7.3 自動補正装置の状態
6.3
JISと同じ。
一致
−
−
7.4 試験のための動作モ
ード
6.4
JISとほぼ同じ。
一致
−
−
7.5 電気式はかりの試験
6.5
JISとほぼ同じ。
削除
7.5.1 審査の規定を削除した。
取引証明に使用されない一般製品に
対して不要な規定であるため,削除し
た。
8 検査
8.1 一般
5.1
JISとほぼ同じ。
一致
−
−
8.2 型式検査
5.2
JISとほぼ同じ。
削除
8.2.1 文書の規定を削除した。
取引証明に使用されない一般製品に
対して不要な規定であるため,削除し
た。
8.3 受渡検査
5.3
JISとほぼ同じ。
削除
8.3.3 一般製品に対しては計量当
局による試験の実施は該当しない
ため,削除した。
計量法の要求事項として,附属書JC
に同様の内容を記載した。
8.4 後続計量管理
5.4
後続計量管理
削除
8.4 法定計量に関連する記載を削
除した。
取引証明に使用されない一般製品に
対して不要な規定であるため,削除し
た。
附属書A
(規定)
自動捕捉式
はかりの試
験手順
−
A.1
型式承認審査
削除
規定を削除した。
取引証明に使用されない一般製品に
対して不要な規定であるため,削除し
た。
−
A.2
初期検定での審査
削除
規定を削除した。
取引証明に使用されない一般製品に
対して不要な規定であるため,削除し
た。
A.1 一般試験条件
A.3
JISとほぼ同じ。
一致
−
−
A.2 検査工程
A.4
JISとほぼ同じ。
一致
−
−
A.3 計量性能試験
A.5
JISと同じ。
一致
−
−
3
B
7
6
0
7
:
2
0
1
8
80
B 7607:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
附属書A
(規定)
自動捕捉式
はかりの試
験手順
(続き)
A.4 影響因子及び妨害試
験
A.6
JISと同じ。
削除
A.4.1.2.3 文書に関する記載を削
除した。
この規格では文書類は規定しない。
変更
A.4.2.1 試験条件の表現を一部変
更した。
非自動はかり及び他の3機種の自動
はかりと整合させるため。実質的な条
件の変更ではないため,技術的差異は
ない。
削除
A.4.2.7 適用範囲の変更に伴い,適
用から外れる機種に対する規定で
あるため削除した。
箇条1と同じ。
変更
A.4.3.1 表A.8に周波数60 Hzに該
当する要件を追記した。
我が国では電源周波数60 Hzも使用さ
れているため。
削除
A.4.3.6 適用範囲の変更に伴い,適
用から外れる機種に対する規定で
あるため削除した。
箇条1と同じ。
A.5 スパン安定性試験
A.7
JISと同じ。
一致
−
−
附属書JA
(規定)
取引又は証明用の自動捕
捉式はかりの要求事項
−
−
追加
取引又は証明用の自動捕捉式はか
りの計量法上の要求事項を附属書
にとりまとめた。
国内法(計量法)による規定に対応
附属書JB
(規定)
使用中検査
−
−
追加
計量法上の使用中検査の規定につ
いてとりまとめた。
国内法(計量法)による規定に対応
附属書JC
(規定)
検定に使用する器具
−
−
追加
検定に使用する基準器及びその他
の器具についての規定及び管理の
方法について規定した。
国内法(計量法)による規定に対応
附属書JD
(規定)
自動捕捉式はかりの修理
−
−
追加
自動捕捉式はかりの修理を附属書
としてとりまとめた。
国内法(計量法)による規定に対応
JISと国際規格との対応の程度の全体評価:OIML R 51-1:2006,MOD
著
作
権
法
に
よ
り
無
断
で
の
複
製
,
転
載
等
は
禁
止
さ
れ
て
お
り
ま
す
。
3
B
7
6
0
7
:
2
0
1
8
81
B 7607:2018
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 一致 ················ 技術的差異がない。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
3
B
7
6
0
7
:
2
0
1
8