B 0913-1:2013
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 用語及び定義 ··················································································································· 1
2.1 一般用語 ······················································································································ 1
2.2 ロータに関する用語 ······································································································ 10
2.3 ステータに関する用語 ··································································································· 10
2.4 センサに関する用語 ······································································································ 11
2.5 ダイナミクス,制御及びエレクトロニクスに関する用語 ······················································· 12
2.6 補助備品に関する用語 ··································································································· 15
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 17
B 0913-1:2013
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本機械学会(JSME)及び一
般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,
日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 0913-1:2013
機械振動−制御形磁気軸受が組み込まれた
回転機械の振動−第1部:用語
Mechanical vibration-Vibration of rotating machinery equipped with
active magnetic bearings-Part 1: Vocabulary
序文
この規格は,2002年に第1版として発行されたISO 14839-1及びAmendment 1(2010)を基とし,対応
国際規格において修正することが適切と判断できる部分に関し技術的内容を変更して作成した日本工業規
格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,制御形磁気軸受を備えた回転機械及びその振動に関する用語について規定する。
注記1 機械振動に関し,一般的に用いられている主な用語及び定義は,JIS B 0153を,釣合せにつ
いては,ISO 1925を参照。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 14839-1:2002,Mechanical vibration−Vibration of rotating machinery equipped with active
magnetic bearings−Part 1: Vocabulary及びAmendment 1:2010(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
用語及び定義
2.1
一般用語
2.1.0
一般
制御形磁気軸受(AMB)及びタッチダウン軸受が組み込まれた回転機械に対し,軸受の図示記号の一例
を図1に示す。
タッチダウン軸受
ラジアルAMB
アキシアルAMB
図1−軸受の図示記号

2
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.1.1
磁気軸受(magnetic bearing)
磁気的な吸引力又は反発力によって,ロータ(回転体)の浮上及び/又は動的な安定化を行う軸受。
2.1.2
浮上(levitation)
磁気的な吸引力又は反発力を用いて,機械的な接触をせずにロータを支持すること。
2.1.3
制御形磁気軸受,AMB(active magnetic bearing)
制御技術(通常,変位センサ,電磁石,パワーアンプ,電源及びAMB制御装置から構成される。)に基
づいて,磁気的な吸引力だけを使用し,非接触でロータを支持する手段(図2参照)。
図2−AMBの原理
2.1.4
受動形磁気軸受(passive magnetic bearing)
フィードバック制御をしない磁気力を用いて,機械的な接触をせずにロータを支持する手段。
例 永久磁石形磁気軸受,超電導磁気軸受など
2.1.5
永久磁石形磁気軸受,PMB(permanent magnetic bearing)
フィードバック制御をしない,一対又は複数対の永久磁石を用いた受動形磁気軸受。
2.1.6
超電導磁気軸受,SMB(super-conducting magnetic bearing)
フィードバック制御をしない,一対の(高温)超伝導体及び永久磁石を用いた受動形磁気軸受。いわゆ
る,ピン止効果(吸引力及び反発力)を利用する。
2.1.7
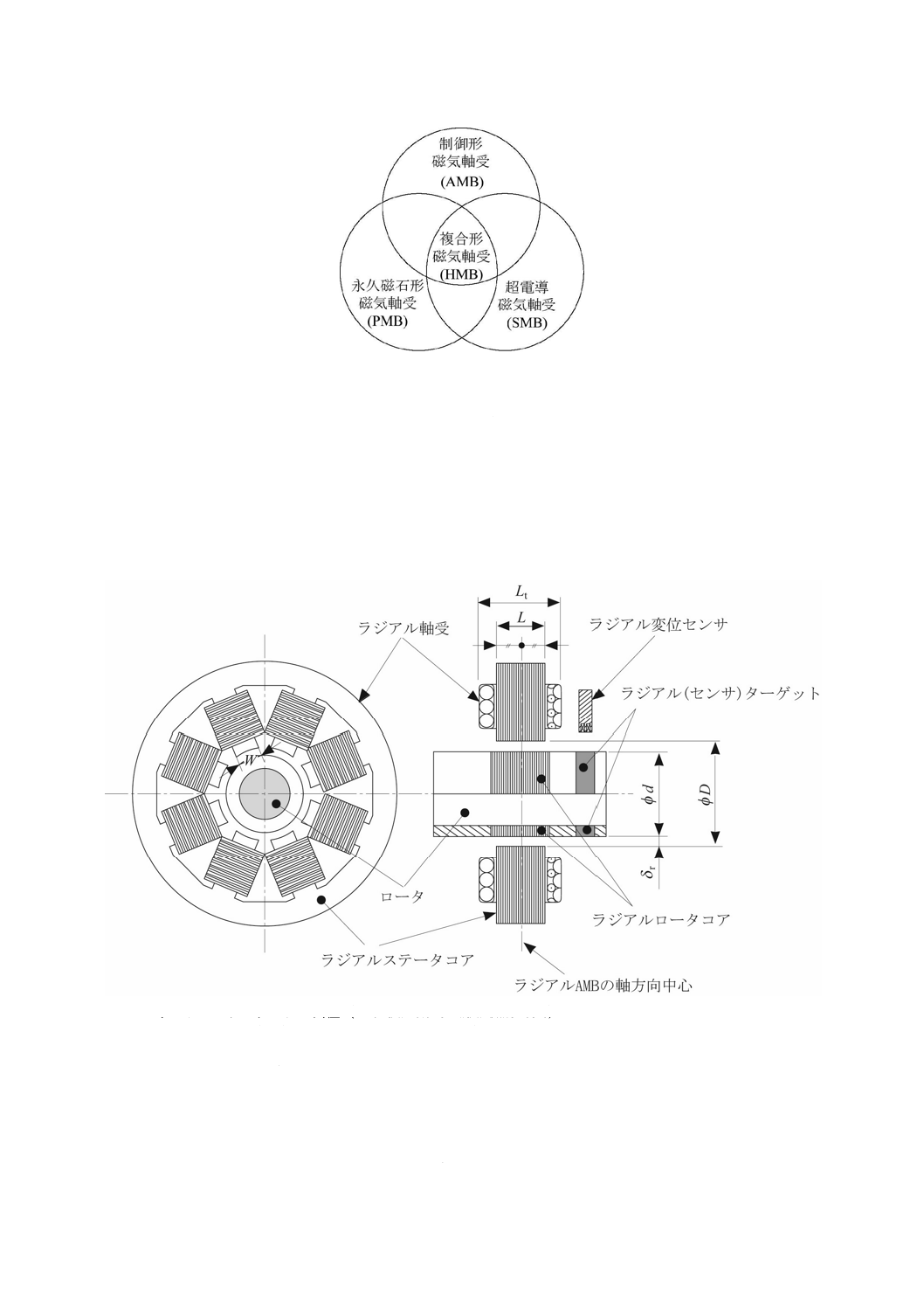
複合形磁気軸受,HMB(hybrid magnetic bearing)
AMB(制御形磁気軸受)と受動形磁気軸受とのあらゆる組合せから成る軸受(図3参照)。
3
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3−磁気軸受のカテゴリ
2.1.8
永久磁石バイアス式AMB(permanent-magnet-biased AMB)
一つ以上の永久磁石によって,定常磁束又はバイアス磁束が供給されているAMB。
2.1.9
ラジアルAMB(radial AMB)
横形ロータに加わる重力,及び/又はロータの不釣合い若しくは流体力に起因する半径方向の外力に対
して,ロータを浮上させ,支持するAMB(図4参照)。
D ラジアルステータコアの内径(inner diameter of radial stator core)
d
ロータコアの外径(outer diameter of radial rotor core)
δr 基準磁気隙間[nominal magnetic gap (D−d)/2]
Lt 軸受全長(コイル線含)[total bearing length (including coil windings)]
L
ラジアル軸受有効長(effective radial bearing length)
W 磁極の幅(width of a magnetic pole)
図4−ラジアルAMB断面
4
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.1.10
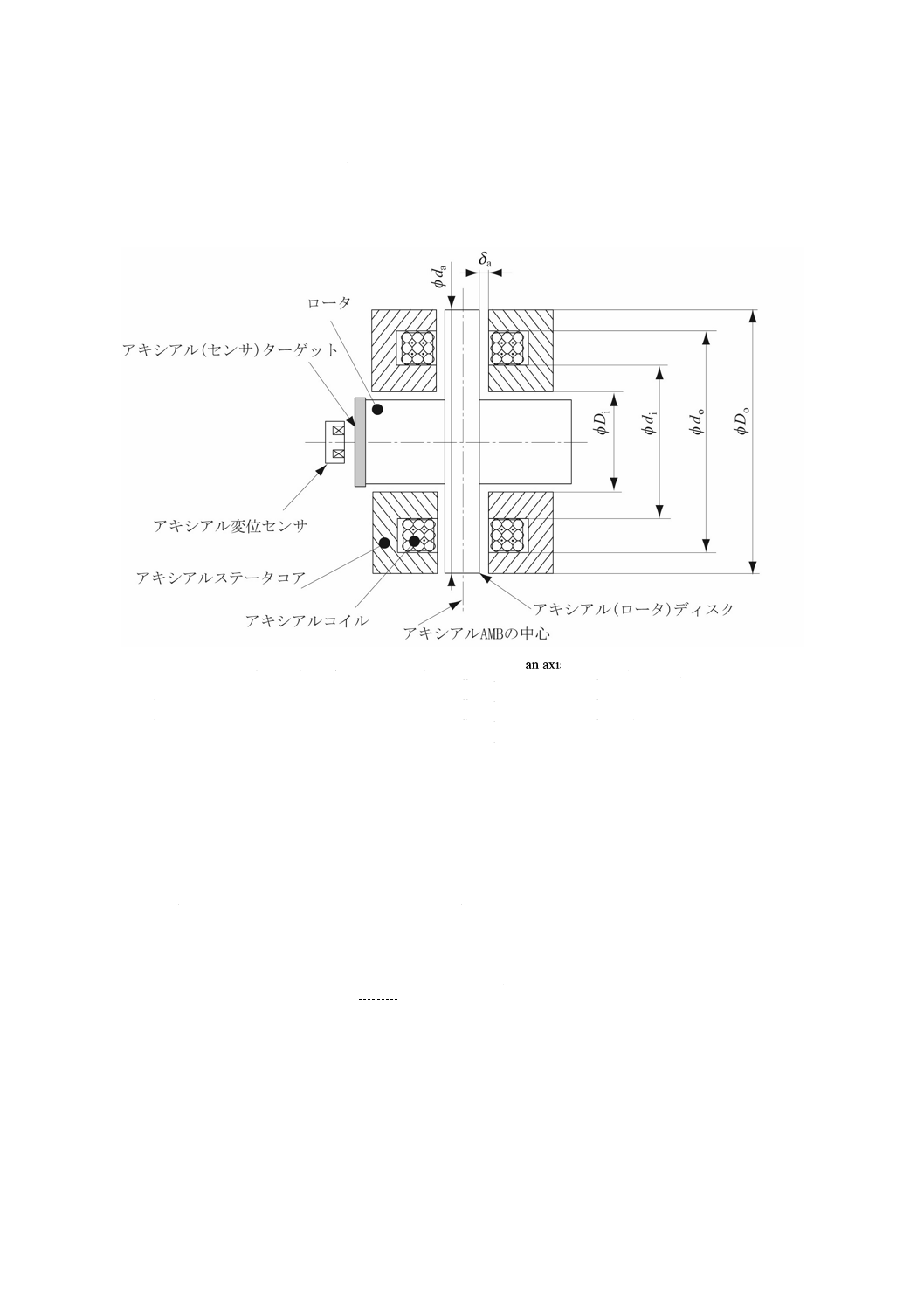
アキシアルAMB,スラストAMB(axial AMB,thrust AMB)
ロータのアキシアル方向に作用する流体力などの外乱,縦形ロータに作用する重力などに対して,ロー
タをアキシアル方向に浮上させ,支持するAMB(図5参照)。
da アキシアル(ロータ)ディスクの外径(outer diameter of an axial rotor disc)
Do アキシアルステータの外側磁極の外径(outer diameter of outer pole of an axial stator)
do アキシアルステータの外側磁極の内径(inner diameter of outer pole of an axial stator)
di アキシアルステータの内側磁極の外径(outer diameter of inner pole of an axial stator)
Di アキシアルステータの内側磁極の内径(inner diameter of inner pole of an axial stator)
δa 基準磁気隙間(nominal magnetic gap)
図5−アキシアルAMB断面
2.1.11
基準磁気隙間(nominal magnetic gap)
ロータの軸心がステータコアの中心に位置した場合の,ロータの磁性材料とステータの磁性材料との距
離。ラジアルAMBは図4のδr,アキシアルAMBは図5のδaを参照。
2.1.12
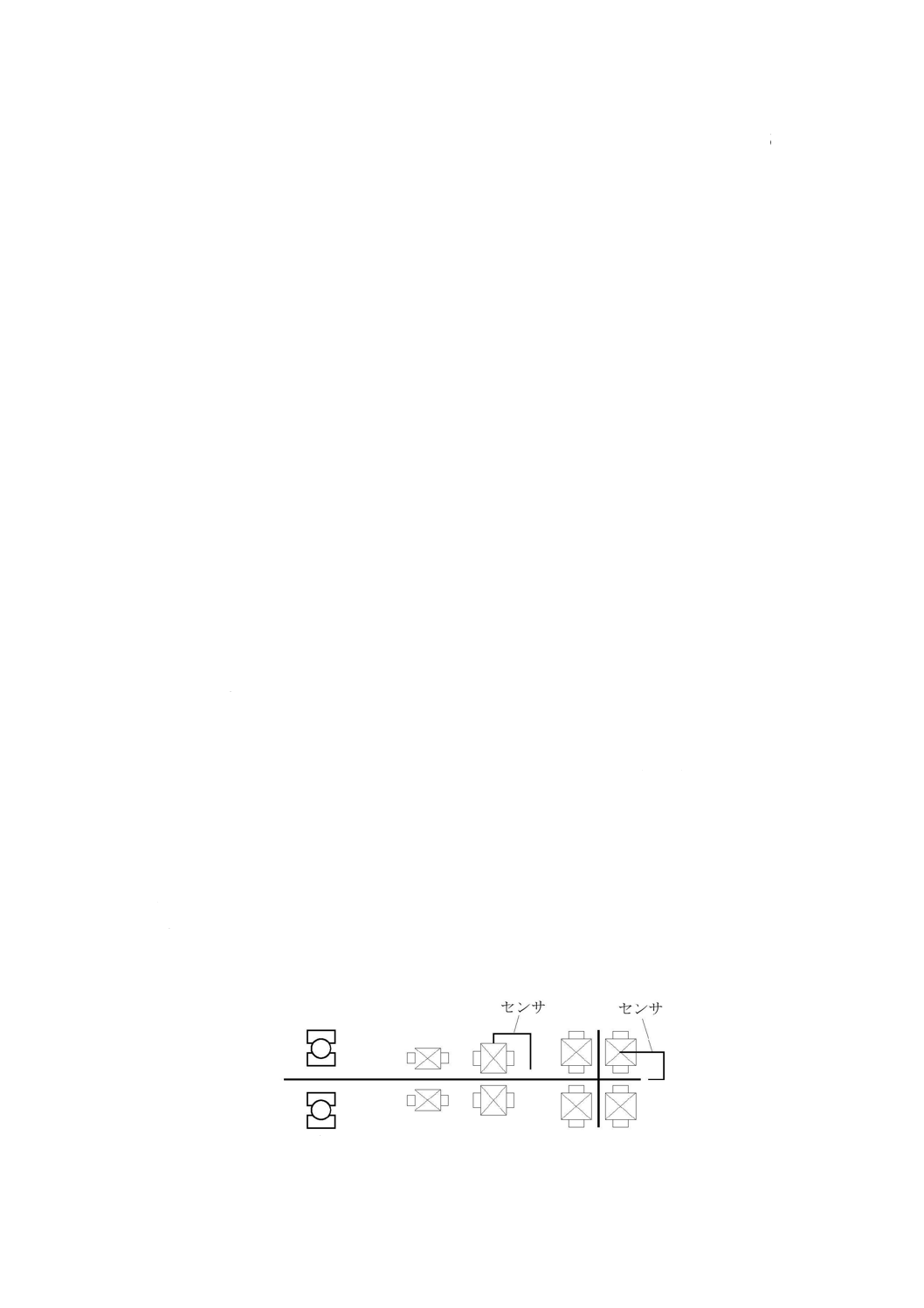
ラジアルAMBの隙間中心(clearance center of a radial AMB)
ラジアルAMBステータの幾何学的な中心(図6参照)。
5
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
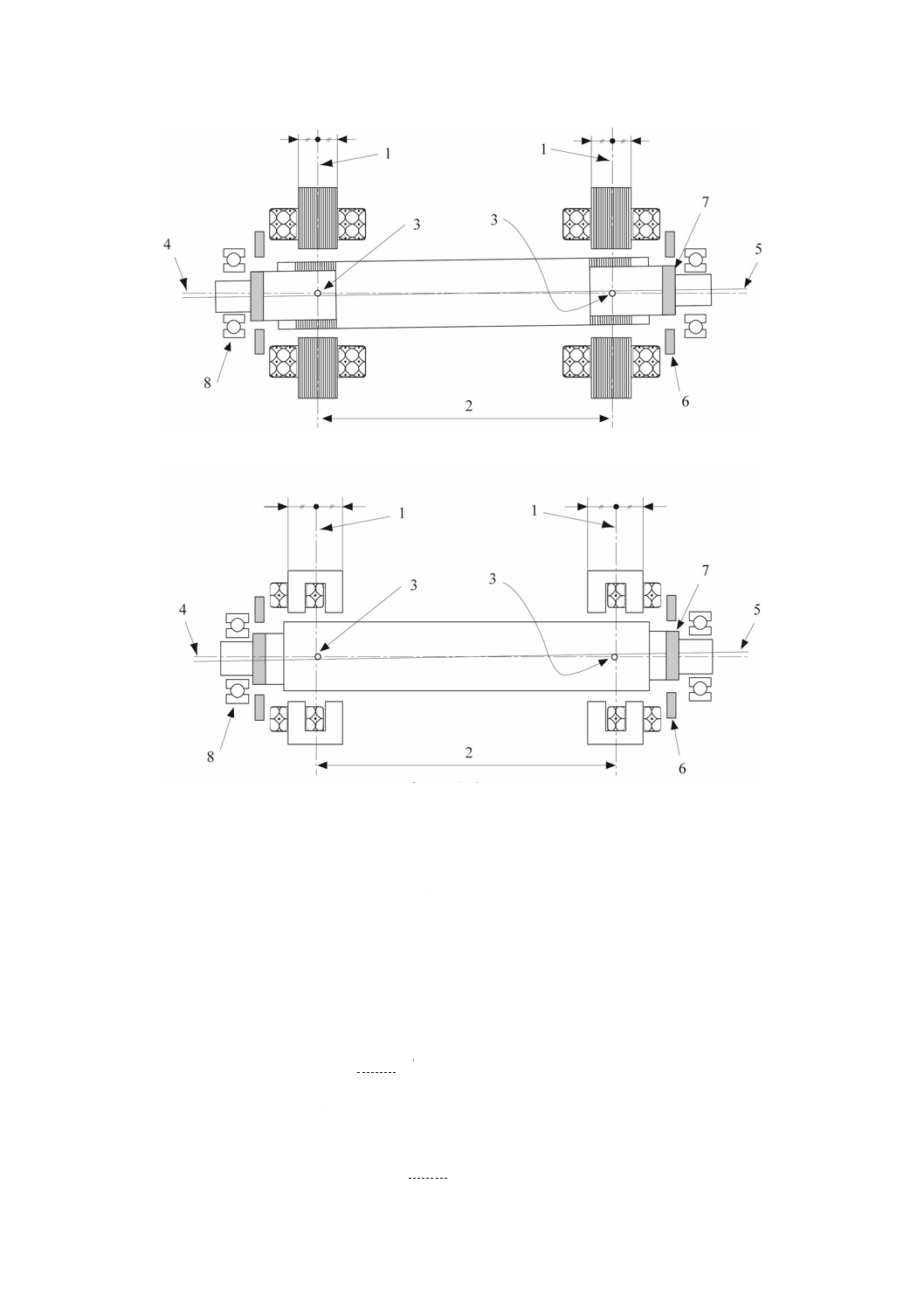
b) ホモポーラ形(homo polar type)
1
ラジアルAMBのアキシアル方向中心(axial center of a radial AMB)
2
ラジアルAMBの軸受間距離(bearing span between radial AMBs)
3
ラジアルAMBの隙間中心(clearance center of a radial AMB)
4
ラジアルAMBの隙間中心線(clearance centerline of radial AMBs)
5
ラジアルAMBのジャーナル中心線(journal centerline of radial AMBs)
6
ラジアル変位センサ(radial displacement sensor)
7
ラジアルセンサターゲット(radial target)
8
タッチダウン軸受(touch down bearing)
図6−ラジアルAMBの中心及び中心線
2.1.13
ラジアルAMBの磁気中心(magnetic center of a radial AMB)
ラジアルAMBにおいて,基準電流又は磁束を与えた場合,電磁加振力及び制御力がない状態で,ロー
タに作用する半径方向吸引力がゼロとなるロータの位置。
2.1.14
ラジアルAMBのアキシアル方向中心(axial center of a radial AMB)
a) ヘテロポーラ形(hetero polar type)
6
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ステータコアにおける幾何学的中心のアキシアル方向の位置(図6参照)。
2.1.15
アキシアルAMBの(隙間)中心[(clearance) center of an axial AMB]
スラストAMBの(隙間)中心[(clearance) center of a thrust AMB]
アキシアル(スラスト)AMBステータにおける幾何学的中心のアキシアル方向位置(図5参照)。
2.1.16
アキシアルAMBのアキシアル方向磁気中心(axial magnetic center of an axial AMB)
アキシアル(ロータ)ディスクに作用する吸引力がゼロとなる,アキシアルAMBにおけるアキシアル
(ロータ)ディスクの位置。
2.1.17
ラジアルAMBの隙間中心線(clearance centerline of radial AMBs)
二つのラジアルAMBの隙間中心を結ぶ線(図6参照)。
2.1.18
ラジアルAMBのジャーナル中心線(journal centerline of radial AMBs)
ラジアルAMBのジャーナル中心間の幾何学的中心線。ロータが剛体であるとみなされる場合は,軸の
中心線(図6参照)。
2.1.19
ラジアルAMBの軸受間距離(bearing span between radial AMBs)
二つのラジアルAMBのアキシアル方向中心の距離(図6参照)。
2.1.20
磁極数(number of poles)
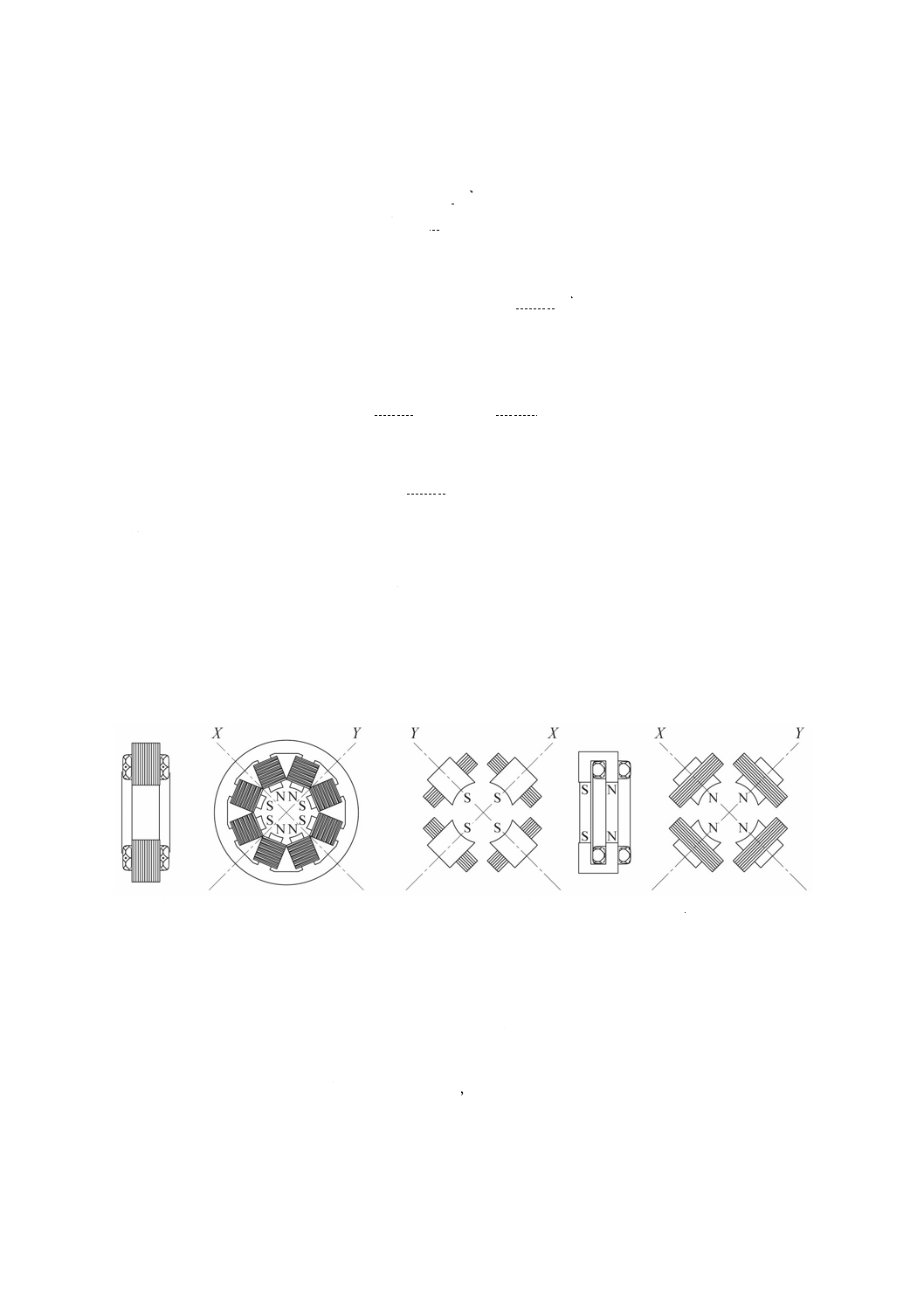
ラジアルAMBにおける電磁石のN極とS極との合計の数(図7参照)。
a) ヘテロポーラ形(8極)
b) ホモポーラ形(8極)
注記 X及びYは制御軸を示す。
図7−ラジアルAMBの磁極数
2.1.21
ヘテロポーラ形ラジアルAMB(heteropolar-type radial AMB)
図8のように(軸に垂直な)断面内で極性の異なる磁極を配置したラジアルAMB。
注記 磁極配列は,(N, S, N, S, …),(N, S, S, N, …)などがある。
7
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
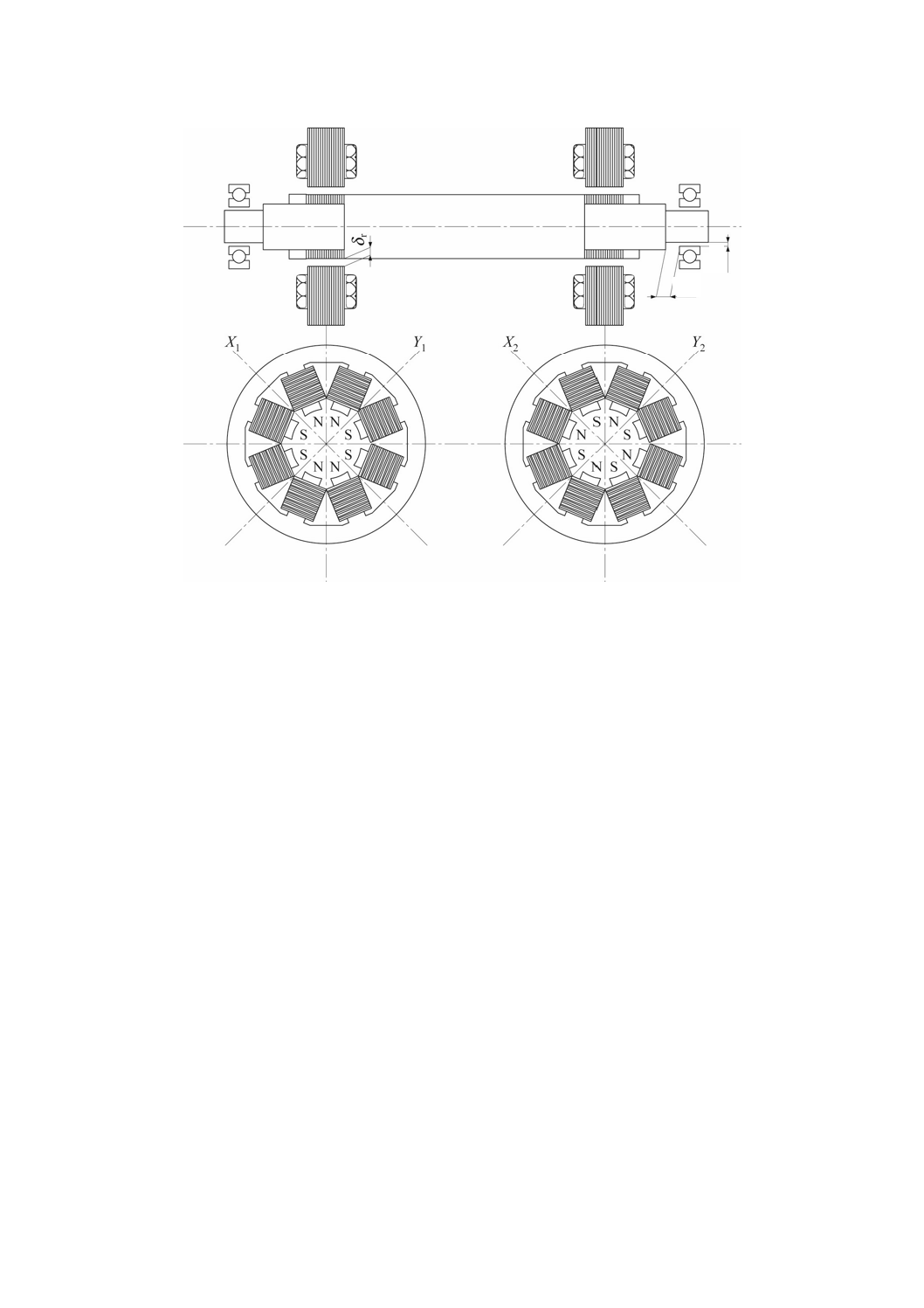
注記 X1,Y1,X2及びY2は制御軸を示す。
図8−ヘテロポーラ形ラジアルAMB
2.1.22
ホモポーラ形ラジアルAMB(homopolar-type radial AMB)
図9のように(軸に垂直な)同一断面内で同じ極性の磁極を配置したラジアルAMB。
注記 極性の配置は,(N, N, N, N, ...),又は(S, S, S, S, ...)となる。
Cta
C
tr
8
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
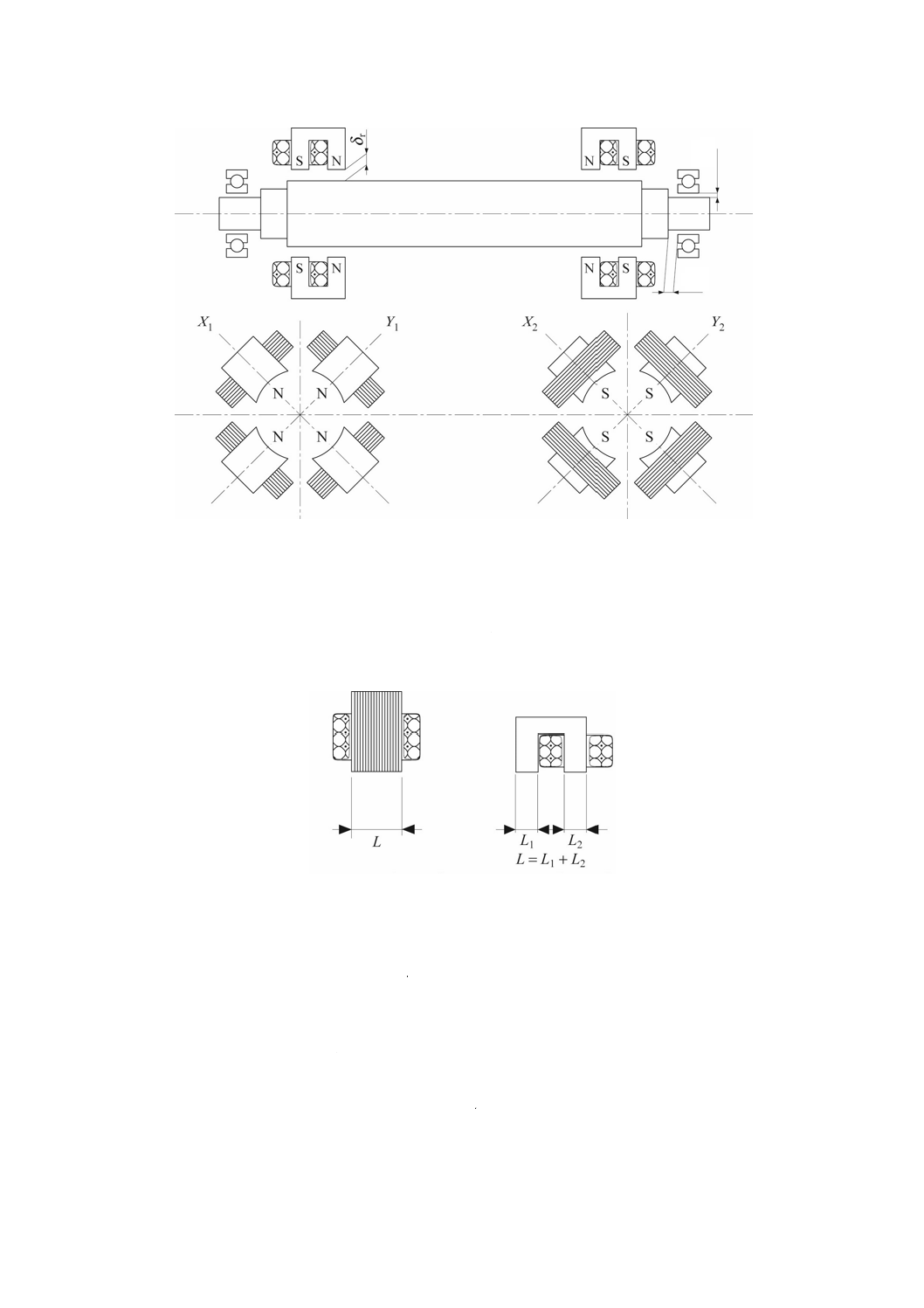
注記 X1,Y1,X2及びY2は制御軸を示す。
図9−ホモポーラ形ラジアルAMB
2.1.23
AMBの有効長(effective length of a radial magnetic bearing)
ラジアル軸受のステータ磁極表面のアキシアル方向の長さ(図10参照)。
a) ヘテロポーラ形
b) ホモポーラ形
図10−AMBの有効長L
2.1.24
ラジアルAMBの投影面積(projection area of a radial AMB)
ラジアル軸受のロータコアの外形dとAMBの有効長Lとの積(d×L)(図4参照)。
2.1.25
磁極面積(area of one magnetic pole)
ロータに作用する吸引力を生成する磁極の断面積。ラジアルAMBでは,磁極面積=WL(図4参照),
アキシアルAMBでは,磁極対面積= (図5参照)。
注記 2.1.24で規定されている投影面積とは異なる。
[
])
(
)
(
4
2
i
2
i
2
o
2
o
D
d
d
D
π
−
+
−
Cta
C
tr
9
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
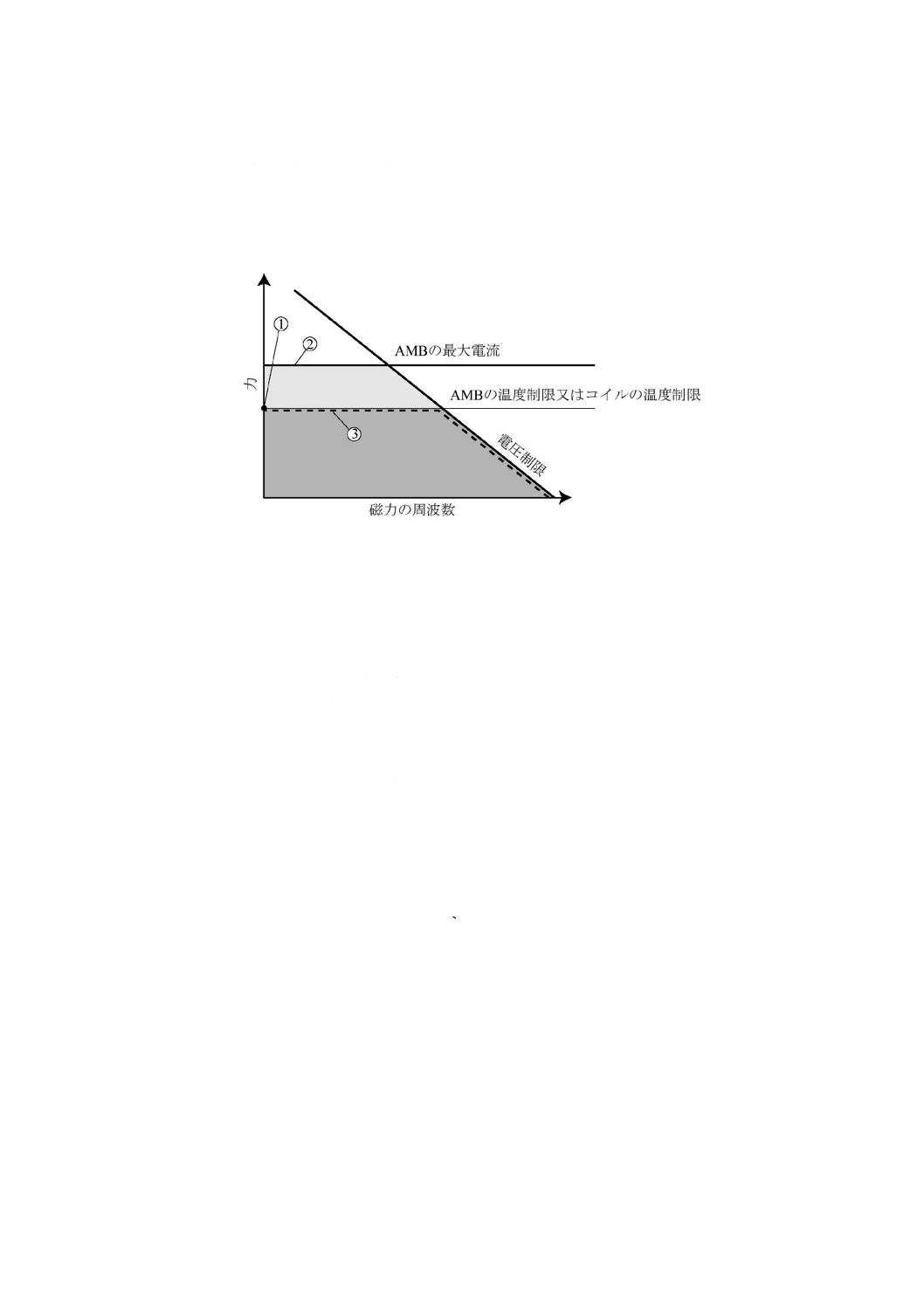
2.1.26
AMBの負荷容量(load capacity of an AMB)
ロータが中央に位置するときの軸受最大負荷。
注記 通常,この値は,ステータ及びロータコアに用いる強磁性材料の磁気飽和,並びにコイルを励
磁するパワーアンプの最大電流及び電圧によって制限される(図11参照)。
① 静的負荷容量(static load capacity)
② 瞬時負荷容量(peak transient load capacity)
③ 動的負荷容量(最大連続使用)[dynamic load capacity (maximum continuous operation)]
図11−AMBの負荷容量
2.1.26.1
AMBの静的負荷容量(static load capacity of an AMB)
連続使用可能なAMBの最大静負荷。
2.1.26.2
AMBの瞬時負荷容量(peak transient load capacity of an AMB)
限られた時間で使用可能なAMBの最大負荷。
2.1.26.3
AMBの動的負荷容量(dynamic load capacity of an AMB)
周波数に依存したAMBの最大許容負荷。
2.1.27
(ラジアル)AMBの静的最大面圧[load pressure of a (radial) AMB]
AMBの静的負荷容量Fmaxを軸受の投影面積d×Lで除した値。次の式で定義される。
(
)
L
d
F
p
×
=
/
max
注記 2.1.24及び2.1.26.1を参照。
2.1.28
AMBの制御軸数(number of control axes of an AMB)
ロータがAMBによって制御される自由度の数。
例1 軸制御形AMB:回転軸の1自由度の振動及び動きを制御するAMB
例2 2軸制御形AMB:回転軸の2自由度の振動及び動きを制御するAMB
例3 3軸制御形AMB:回転軸の3自由度の振動及び動きを制御するAMB
10
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.1.29
AMBの全損失(total AMB loss)
AMB全ての損失。これには,次のものが含まれる。
a) ロータ及びステータにおける渦電流及びヒステリシスによる損失(鉄損)
b) コイルの電気抵抗による損失(銅損)
c) 流体抵抗による損失(風損)
d) 電装部品(ケーブル,制御盤)による損失
2.1.30
セルフセンシングAMB(self-sensing AMB)
変位センサを用いずにロータの位置を検出できる機能をもつAMB。
2.2
ロータに関する用語
2.2.1
ラジアルロータコア(radial rotor core,radial rotor journal)
ラジアル方向の磁気力が作用する回転軸の磁性材料の部分。
2.2.2
アキシアル(ロータ)ディスク,スラスト(ロータ)ディスク(axial bearing disc,axial disc,axial rotor disc,
thrust bearing disc,thrust disc,thrust rotor disc)
アキシアル方向磁気力が作用する回転軸の磁性材料部分。
2.2.3
ジャーナル径(journal diameter)
ラジアル磁気軸受のロータコアの外径(図4のd参照)。
2.2.4
メカニカルランアウト(mechanical runout,geometrical runout)
変位センサのターゲット面の非真円性及び非同心性による測定上の誤差変位。
2.2.5
エレクトリカルランアウト(electrical runout,sensor runout)
変位センサのターゲット面の電磁気的特性の不均一性による測定上の誤差変位。
2.2.6
DN値(DN value)
直径d(mm)と回転速度N(r/min)との積。
注記 直径dは,次のように定義する。
a) ラジアル磁気軸受のステータがロータの外側にある場合はラジアルロータコアの外径(図
4のd参照)
b) ラジアル磁気軸受のステータがロータの内側にある場合(アウターロータの場合)は,ラ
ジアルロータコアの内径
c) アキシアル(ロータ)ディスクの外径(図5のda参照)
2.3
ステータに関する用語
2.3.1
ステータコア(stator core)
強磁性又は透磁性材の磁気軸受の静止側コンポーネント。
11
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.3.2
ラジアルステータコア(radial stator core)
ラジアル軸受の励磁巻線を巻くステータコア。
2.3.3
アキシアルステータコア,スラストステータコア(axial stator core,thrust stator core)
アキシアル軸受の励磁巻線を巻くステータコア。
2.3.4
励磁コイル(magnetizing coil)
ステータコアに磁束を発生させるための巻線。
2.3.5
ラジアルコイル(radial coil)
ラジアルステータコアに巻く励磁巻線。
2.3.6
アキシアルコイル(axial coil,thrust coil)
アキシアルステータコアに巻く励磁巻線。
2.3.7
許容作動温度(allowed operating temperature)
規定した運転条件において許容できる磁気軸受の雰囲気温度。
2.4
センサに関する用語
2.4.1
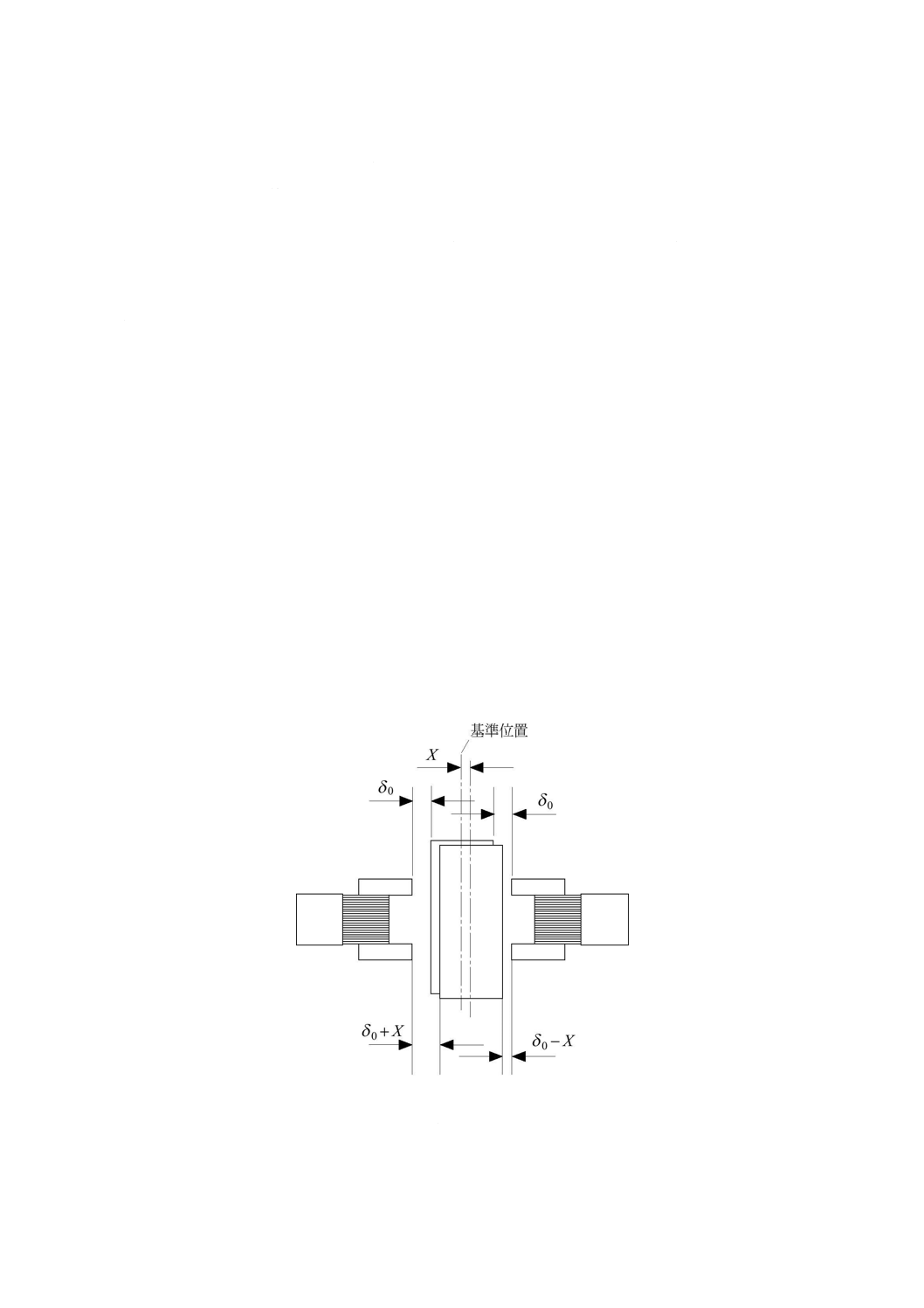
基準位置(nominal position)
目標とする浮上位置(図12参照)。
δ0:基準ラジアル隙間
図12−ラジアル方向基準位置
12
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.4.2
ラジアル変位(radial shaft displacement)
基準位置から測定される回転体中心の変位。一般的に軸振動と呼ばれる(図12のX参照)。
2.4.3
変位センサ,位置センサ(displacement sensor,position sensor)
非接触式の軸位置検出用センサ(図4及び図5参照)。
例 渦電流センサ,誘導センサ,容量センサ,光センサ,ホールセンサなど。
2.4.4
ラジアル変位センサ,ラジアル位置センサ(radial displacement sensor,radial position sensor)
ラジアル方向(径方向)の位置を検出するセンサ(図6参照)。
2.4.5
アキシアル変位センサ,アキシアル位置センサ(axial displacement sensor,axial position sensor)
アキシアル方向の位置を検出するセンサ(図5参照)。
2.4.6
センサターゲット(sensor target)
変位センサが変位を検出するロータ側部材(図4及び図5参照)。
2.4.7
ラジアル(センサ)ターゲット[radial (sensor) target]
ラジアル変位センサが変位を検出するセンサターゲット(図4参照)。
2.4.8
アキシアル(センサ)ターゲット[axial (sensor) target]
アキシアル変位センサが変位を検出するセンサターゲット(図5参照)。
2.5
ダイナミクス,制御及びエレクトロニクスに関する用語
2.5.1
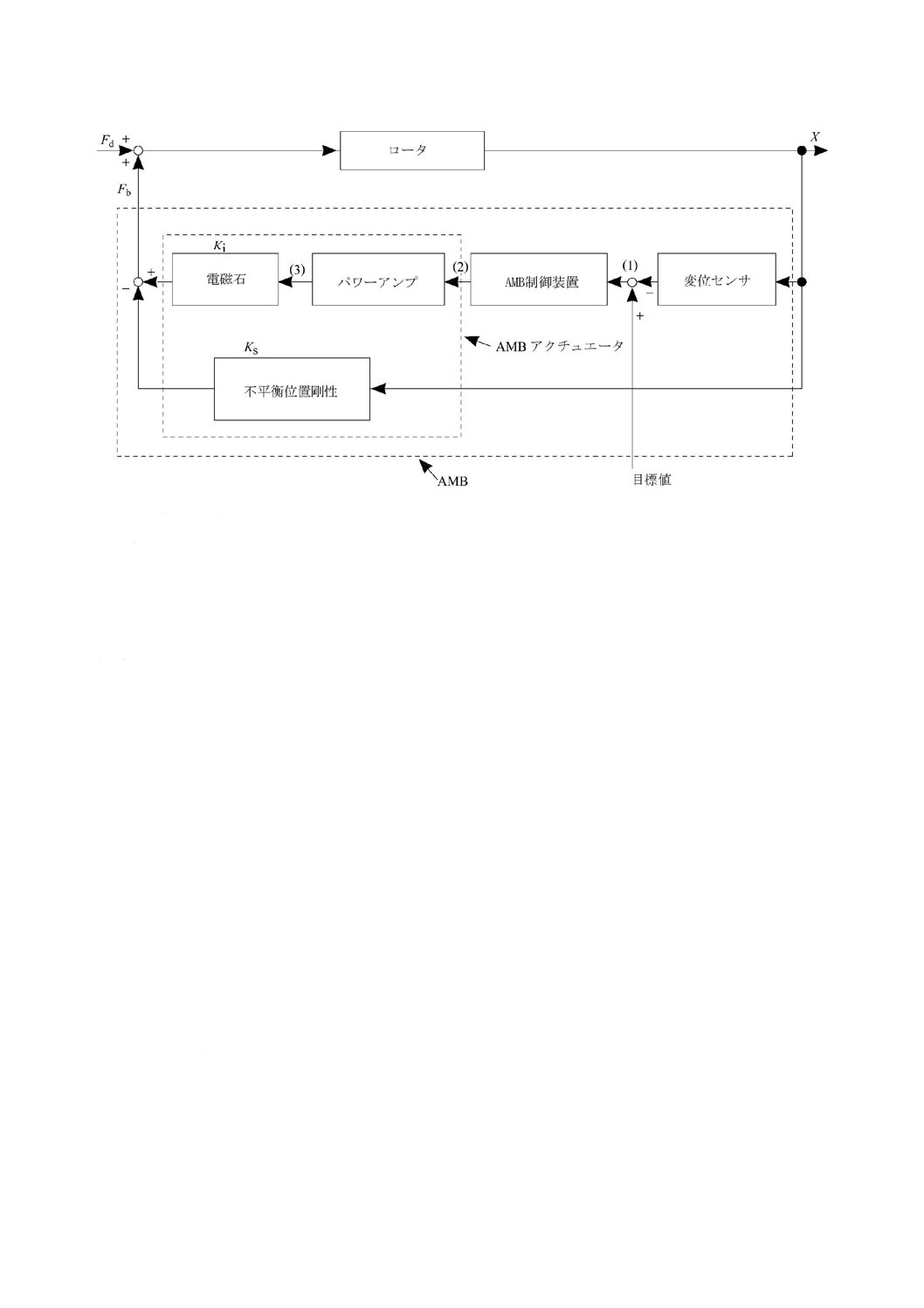
AMBシステム(AMB system)
ロータ,変位センサ又はロータの位置を検出する他の手段,制御装置,パワーアンプ及び電磁石からな
るロータを磁気吸引力によって浮上させ,保持するシステム(図2及び図13を参照)。
13
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Fb 軸受出力(N)(AMB force)
Fd 外乱入力(N)(disturbance force)
X
ロータ変位(m)(displacement)
Ki 電流剛性(N/A)(current stiffness)
KS 不平衡位置剛性(N/m)(negative position stiffness)
(1) センサ信号(sensor signal)
(2) 制御信号(control signal)
(3) 制御電流(control current)
図13−AMBシステムのブロック線図
2.5.2
AMB制御装置(AMB controller)
センサ信号を検出し,演算処理した結果を,回転体を浮上させる磁気吸引力の調整のためにパワーアン
プへ送信する装置。
注記 これはアナログ又はデジタル装置によって実現できる(アナログ制御装置又はデジタル制御装
置)。
2.5.3
パワーアンプ(power amplifier)
磁気吸引力を発生させるために,励磁コイルに電流を供給する電力出力装置。
例 パワーアンプの典型的例として,リニアアンプ,アナログアンプ,PWMアンプ,スイッチング
アンプなどがある。
2.5.4
AMBの電流制御[(AMB) current control]
電圧入力/電流出力の形式のパワーアンプを使用したAMBの制御方法。
2.5.5
AMBの電圧制御[(AMB) voltage control]
電圧入力/電圧出力の形式のパワーアンプを使用したAMBの制御方法。
2.5.6
AMBのバイアス電流,I0(AMB bias current,I0)
AMBの電流及びエアギャップの関数として表現される磁気吸引力を線形化することを目的として,励
14
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
磁コイルに供給される直流電流。
2.5.7
AMB用パワーアンプの動作モード(operation mode of AMB power amplifier)
AMB用パワーアンプの特性。
例 2象限動作:出力電圧は正又は負であるが,電流は常に正。
4象限動作:出力電圧は正又は負であるが,電流は任意に正又は負。
2.5.8
不平衡位置剛性,KS(negative position stiffness,KS)
バイアス電流を用いて吸引力を線形化した制御形磁気軸受において,定常ロータ位置での,バイアス電
流によって生じる負の位置剛性。
2.5.9
閉ループシステムの動剛性(closed-loop dynamic system stiffness)
外乱入力Fd及び出力変位Xをもつ制御形磁気軸受の閉ループシステムにおける,XからFdへの伝達関
数(図13参照)。
2.5.10
閉ループシステムのコンプライアンス(closed-loop dynamic system compliance)
外乱入力Fd及び出力変位Xをもつ制御形磁気軸受の閉ループシステムにおける,FdからXへの伝達関
数で,閉ループシステムの動剛性の逆数(図13参照)。
2.5.11
AMBの開ループシステムの動剛性(open-loop AMB dynamic stiffness)
変位センサ,制御系及び電力増幅器を経由した,変位入力X及び軸受出力Fbをもつ制御形磁気軸受の開
ループ系でのXからFdへの伝達関数。
注記 軸受のばね力は,複素比Fb/Xの実数部として得られ,軸受減衰力は,複素比Fb/Xの虚数部と
して得られる。
2.5.12
(AMBの)分散制御系[(AMB) decentralized control]
ロータの異なる自由度に関して,制御系の入力及び出力が内部で接続しない制御構造。
例 1入力・1出力制御系(SISO)
2.5.13
(AMBの)集中制御[(AMB) centralized control]
ロータの異なる自由度に関して,制御系の入力及び出力が内部で接続する制御構造。
例 次の制御方法は,この分類となる。
− ジャイロ補償系
− 交差結合剛性
− 運動分離制御系
− 多入力・多出力制御系(MIMO)
2.5.14
(AMBの)チューニング[(AMB) tuning process]
制御形磁気軸受のシステムで,ロータを所望の運転状態に維持するための制御系伝達関数の調整作業。
15
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
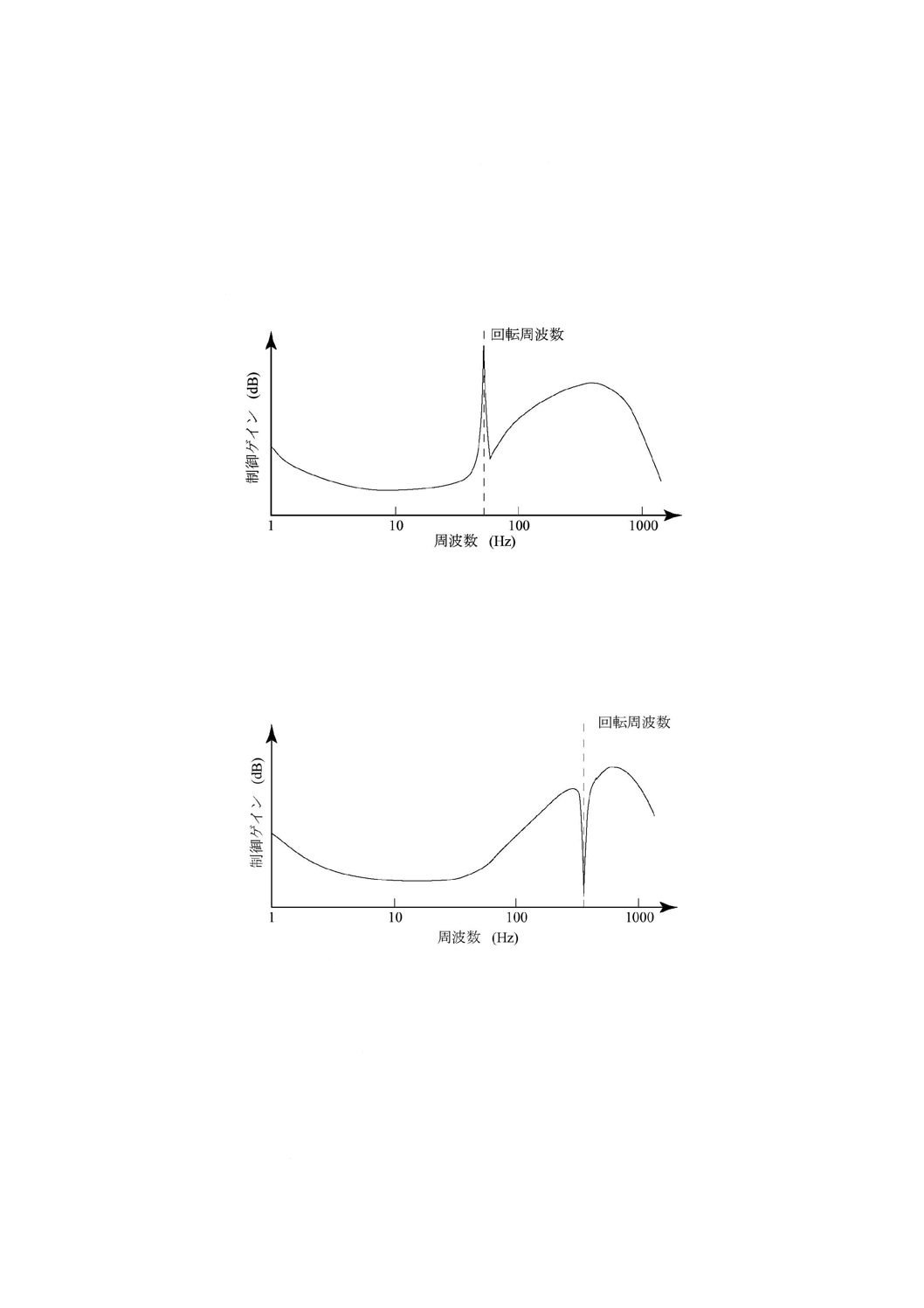
2.5.15
不釣合い力相殺制御,UFCC(unbalance force counteracting control)
制御ゲインの回転周波数成分を増大させた軸受力で,不釣合い力によって引き起こされるロータの振れ
回りを積極的に抑え込む制御。
注記 不釣合い力を相殺する軸受力の反力が軸受基礎へ伝わり振動の原因となり得るが,その一方で,
幾何学的な中心軸回りのランアウトを含むロータの振れ回りは,軸受力によって抑制される(図
14参照)。
図14−不釣合い力相殺制御のAMB制御装置伝達関数の例
2.5.16
不釣合い力除去制御,UFRC(imbalance force rejection control,unbalance force rejection control)
制御ゲインの回転周波数成分を除去した軸受力で,ロータを慣性主軸回りに回転させて軸受基礎に伝達
される振動を軽減する制御(図15参照)。
図15−不釣合い力除去制御のAMB制御装置伝達関数の例
2.6
補助備品に関する用語
2.6.1
タッチダウン軸受(touch-down bearing)
AMBシステムにおいて,ロータの可動範囲を制限し,AMBのステータとロータの表面とが接触しない
ように設けられた軸受。
注記 補助軸受,危急軸受,リテーナー軸受,バックアップ軸受,キャッチャー軸受などのように表
現されるものを含む。
16
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.6.2
タッチダウン軸受の隙間(touch-down bearing clearance)
ラジアルタッチダウン軸受の内径とロータの外径との隙間,又はアキシアルタッチダウン軸受のアキシ
アル方向隙間。ラジアル方向については図8及び図9のCtr,アキシアル方向については図8及び図9の
Ctaを参照。
注記 これらのタッチダウン軸受隙間は,回転体及び軸受系のいかなる部品においても各々の方向に
て,ロータ側とステータ側との間の隙間よりも狭いことが望ましい。
2.6.3
タッチダウン試験(touch-down test)
タッチダウン軸受の性能評価のために,設計仕様の回転速度にて回転している回転体を意図的にタッチ
ダウン軸受に接触・回転させる試験。
2.6.4
非常用電源(back-up battery)
停電の間,回転体を浮上維持するために必要な電力を磁気軸受へ供給する電源。
参考文献 JIS B 0153 機械振動・衝撃用語
ISO 1925,Mechanical vibration−Balancing−Vocabulary
ISO 14839-2,Mechanical vibration−Vibration of rotating machinery equipped with active magnetic
bearings−Part 2: Evaluation of vibration
ISO 14839-3,Mechanical vibration−Vibration of rotating machinery equipped with active magnetic
bearings−Part 3: Evaluation of stability margin
ISO 14839-4,Mechanical vibration−Vibration of rotating machinery equipped with active magnetic
bearings−Part 4: Technical guidelines
17
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS B 0913-1:2013 機械振動−制御形磁気軸受が組み込まれた回転機械の振動
−第1部:用語
ISO 14839-1:2002 Mechanical vibration−Vibration of rotating machinery equipped
with active magnetic bearings−Part 1: Vocabulary及びAmendment 1:2010
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的
差異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
2.1.12〜
2.1.18
center
1.12〜
1.18
centre
変更
日本で標準的に使われているスペ
ルに変更
2.1.17,
2.1.18
AMBs
1.17,
1.18
AMB
変更
英文の表現を修正
この変更は妥当であり次期定
期見直しで修正を提案する。
2.1.20
図7 b)
1.20
Fig.7 (b)
変更
側面図に誤りがあるため修正
この変更は妥当であり次期定
期見直しで修正を提案する。
2.1.22
図9
1.22
Fig.9
変更
側面図に誤りがあるため修正
この変更は妥当であり次期定
期見直しで修正を提案する。
1.31
rise time
削除
解説の意味が曖昧であり,AMBに
特化された用語ではないと判断
この変更は妥当であり次期定
期見直しで修正を提案する。
1.32
dwell time
削除
解説の意味が曖昧であり,AMBに
特化された用語ではないと判断
この変更は妥当であり次期定
期見直しで修正を提案する。
2.4.1,
2.4.2
ラジアル変位の説明で用いて
いる基準位置を用語として
2.4.1で定義し,対応国際規格
のFig.12で示されている線形
化定式に関する説明を解説に
移し,Fig.12に用語の説明に必
要な事項を追加した。
4.1
対応国際規格のFig.12
に,nominal positionの図
示及び軸受力の線形化定
式に関する解説が示され
ている。
変更
nominal positionを定義する項目で
あり,本文としての流れにそぐわ
ず,この部分を解説として取り上
げるのがよいと判断した。
この変更は妥当であり次期定
期見直しで修正を提案する。
3
B
0
9
1
3
-1
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
18
B 0913-1:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的
差異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
2.5.1
図13を,同一のブロックダイ
アグラムにおいてレファレン
ス信号有無の場合について表
現し,対応国際規格のFig.13 a)
及びb)を図13一つにまとめ
た。
5.1
Fig.13 a)及びb)は,a)でレ
ファレンス信号あり,b)
でレファレンス信号なし
の場合について各々提示
している。
変更
対応国際規格の図は,信号の有無
の差だけを示す目的であるにもか
かわらず,その差異が分かりづら
くなっており,一つの図でその差
異を示すのが妥当と判断した。
この変更は妥当であり次期定
期見直しで修正を提案する。
JISと国際規格との対応の程度の全体評価:(ISO 14839-1:2002,Amd. 1:2010:MOD)
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
3
B
0
9
1
3
-1
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。