B 0684-2:2019
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 完全な仕様オペレータ ······································································································· 2
4.1 一般事項 ······················································································································ 2
4.2 フィルタ ······················································································································ 2
4.3 プロービングシステム ···································································································· 2
5 適合性···························································································································· 3
附属書A(参考)調和解析 ····································································································· 4
附属書B(参考)測得方針 ····································································································· 7
附属書C(参考)GPSマトリックスモデル ··············································································· 10
参考文献 ···························································································································· 12
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 13
B 0684-2:2019
(2)
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人日本規格協会(JSA)から,工
業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経済
産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS B 0684の規格群には,次に示す部編成がある。
JIS B 0684-1 第1部:用語及びパラメータ
JIS B 0684-2 第2部:仕様オペレータ
日本工業規格 JIS
B 0684-2:2019
製品の幾何特性仕様(GPS)−平面度−
第2部:仕様オペレータ
Geometrical product specifications (GPS)-Flatness-
Part 2: Specification operators
序文
この規格は,2011年に第1版として発行されたISO 12781-2を基とし,関連する他の日本工業規格との
整合を図るために,技術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
この規格は,製品の幾何特性仕様(GPS)規格の一つであり,GPS基本規格に属し,データムに無関係
な面の形状の規格チェーンのリンク記号Cに関係する。
参考として,調和解析を附属書Aに,測得方針を附属書Bに示す。また,この規格とGPSマトリック
スモデル及び他のGPS規格との詳細な関係を,附属書Cに示す。
注記 リンク記号Cは,ISO/TR 14638:1995ではリンク番号3に対応している。
1
適用範囲
この規格は,平面度に関する仕様オペレータについて規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 12781-2:2011,Geometrical product specifications (GPS)−Flatness−Part 2: Specification
operators(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0635 製品の幾何特性仕様(GPS)−フィルタ処理−線形の輪郭曲面フィルタ:ガウシアンフィ
ルタ
注記 対応国際規格:ISO 16610-61:2015,Geometrical product specification (GPS)−Filtration−Part 61:
Linear areal filters−Gaussian filters(IDT)
JIS B 0641-1 製品の幾何特性仕様(GPS)−製品及び測定装置の測定による検査−第1部:仕様に対
する合否判定基準
注記1
対応国際規格:ISO 14253-1:1998,Geometrical Product Specifications (GPS)−Inspection by
2
B 0684-2:2019
measurement of workpieces and measuring equipment−Part 1: Decision rules for proving
conformance or non-conformance with specifications(IDT)
注記2
ISO 14253-1:1998は廃止され,ISO 14253-1:2017,Geometrical product specifications (GPS)
−Inspection by measurement of workpieces and measuring equipment−Part 1: Decision rules for
verifying conformity or nonconformity with specificationsに置き換えられた。
JIS B 0684-1 製品の幾何特性仕様(GPS)−平面度−第1部:用語及びパラメータ
注記 対応国際規格:ISO 12781-1:2011,Geometrical product specifications (GPS)−Flatness−Part 1:
Vocabulary and parameters of flatness(MOD)
ISO 17450-2,Geometrical product specifications (GPS)−General concepts−Part 2: Basic tenets,
specifications, operators, uncertainties and ambiguities
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 0684-1及びISO 17450-2によるほか,次による。
3.1
仕様オペレータ(specification operators)
不確かさの概念を導入するために,形体を求めるために必要な測定原理,測定方法,測定条件,データ
処理など一連のものを,順序に従って並べたもの(ISO 17450-2:2012の3.2.3参照)。
3.2
完全な仕様オペレータ(complete specification operators)
一義的な仕様オペレータの完備された一式を,明確に定義された順序で並べたもの(ISO 17450-2:2012
の3.2.4参照)。
4
完全な仕様オペレータ
4.1
一般事項
完全な仕様オペレータは,測得平面度曲面に適用するフィルタの通過帯域及び適切な測定子先端形状を
定義する。
注記 実際には,理論上の最低データ点密度で平面形体全体を覆うことは不可能である(附属書B参
照)。また,現在の技術で,許容時間内に平面形体全体を覆うことも不可能である。したがって,
平面形状偏差に関する汎用評価ではなく,評価目的に応じた適切な測得方針を採る必要がある。
4.2
フィルタ
4.2.1
ローパスフィルタ
ローパスフィルタは,カットオフ値よりも短い波長成分を遮断する振幅伝達特性をもつJIS B 0635で規
定するガウシアンフィルタとする。
4.2.2
カットオフ値
平面度の評価において,フィルタは,測得平面度曲面に含まれる正弦波成分の波長範囲を制限する。
4.3
プロービングシステム
4.3.1
プロービング
プロービングは,プローブを移動させてデータをサンプリングすることをいう。
4.3.2
プローブ
データを取得する測定子。オペレータの一部を構成し,その先端形状は4.3.3による。
3
B 0684-2:2019
4.3.3
測定子先端形状
理想的なオペレータにおける測定子先端形状は,理論上の球とする。
4.3.4
測定力
理想的なオペレータにおける測定力は,0 N(ゼロニュートン)とする。
5
適合性
測定に利用したオペレータが仕様に適合しているかどうかの判断基準は,JIS B 0641-1による。
4
B 0684-2:2019
附属書A
(参考)
調和解析
A.1 調和成分
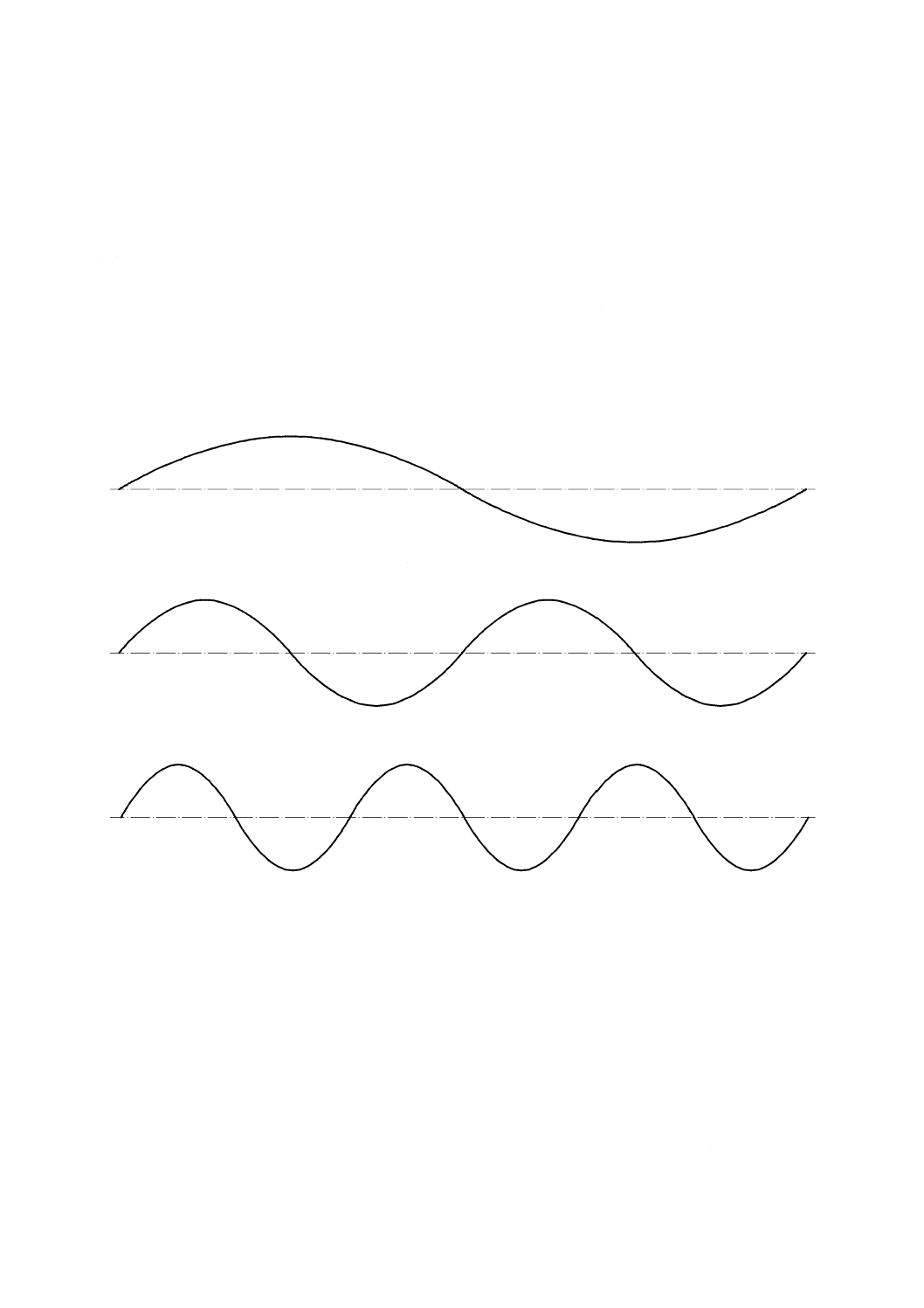
有限長の信号は,フーリエ級数によって調和成分(正弦波成分ともいう。)に分解できる。フーリエ級数
は,波長が基本波長の整数分の1の調和成分からなる。基本波長は,対象とする信号の長さに等しい波長
であり,第1次調和成分という。波長が基本波長の1/2の調和成分は,第2次調和成分,波長が基本波長
の1/3の調和成分は,第3次調和成分という(図A.1参照)。n番目の調和成分は,基本波長をn等分した
波長をもつ調和成分である。
a) 第1次調和成分
b) 第2次調和成分
c) 第3次調和成分
図A.1−調和成分
A.2 エイリアシング及びサンプリングの定理
デジタル化されたデータが原信号を適切に表すためには,サンプリング間隔に配慮する必要がある。帯
域制限された信号に含まれる調和成分には,最短次又は最高次の調和成分が存在する。サンプリングの定
理は,次のように最短波長と最大サンプリング間隔との関係を表している。
− 与えられた波長より短い波長が無限長の信号に含まれていない場合には,与えられた波長の半分以下
の等間隔にとったデータによって原信号が再現できる。
厳密には,サンプリングの定理は,無限長の信号に適用するが,有限長であっても存在し得る最短波長
5
B 0684-2:2019
の半分よりも短いサンプリング間隔というサンプリングの定理は,有効である。
注記1 一般に,サンプリング間隔は,対象とする最短波長の1/4以下にすることが多い。
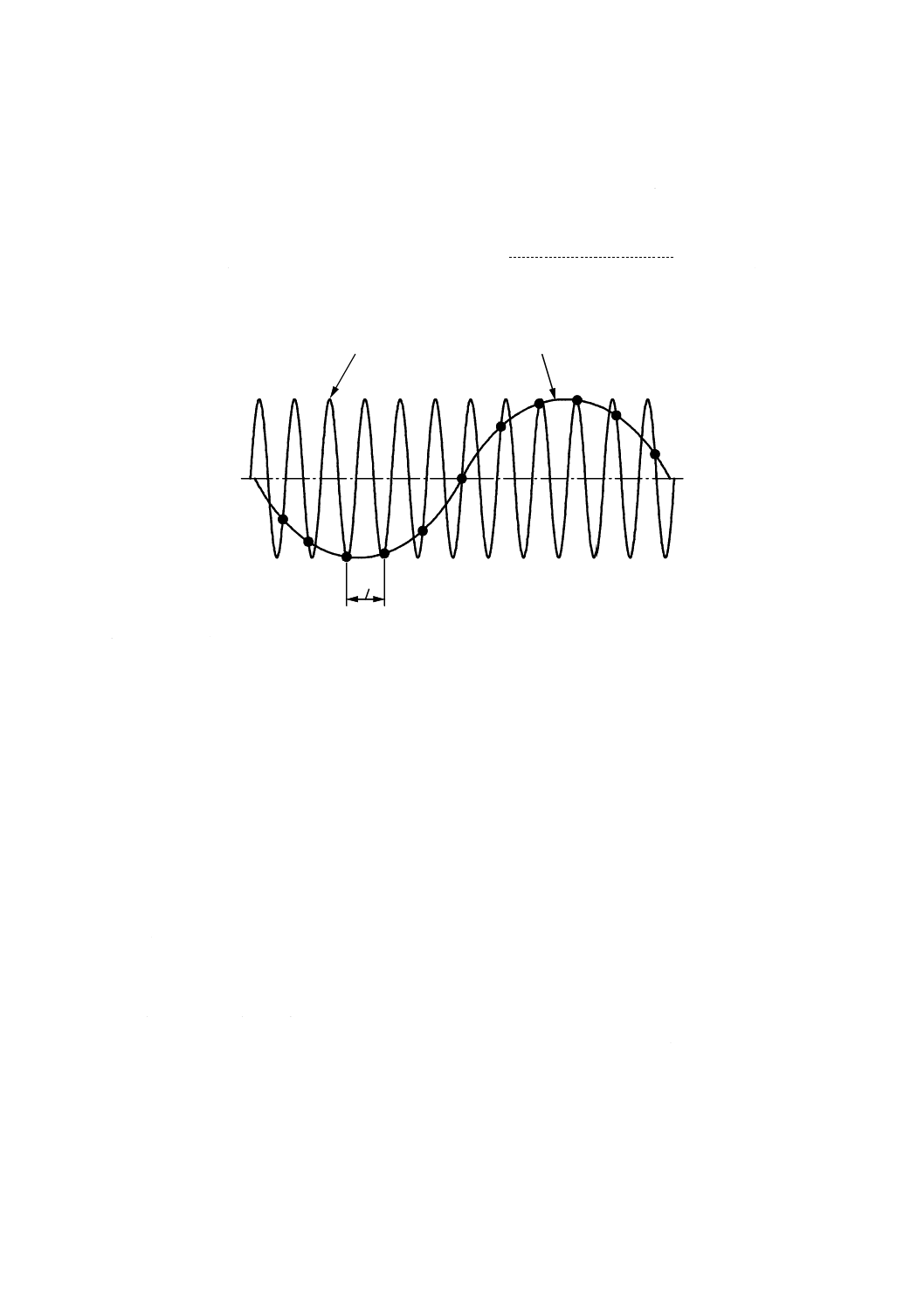
− サンプリング間隔がサンプリングの定理で定まる値より大きい場合には,デジタル化した信号は,エ
イリアシングによる影響を受ける。エイリアシングとは,サンプリング間隔が大きいために,短い波
長の調和成分が長い波長の調和成分として現れる現象(エイリアス信号という。)である(図A.2参照)。
このような場合には,高次の調和成分は,低次の調和成分となって現れるので,その後の解析に影響
する。
a
原信号
b
エイリアス信号
c
サンプリング間隔
注記 この図は,サンプリング間隔がサンプリングの定理による値より大きすぎる場合を示す。
図A.2−エイリアシング
− 実際には,多くの測定機において,エイリアシングを抑制するために,測定子先端形状によるフィル
タリング効果,アナログフィルタ,デジタルフィルタ及びこれらの組合せが利用される。位相補償ロ
ーパスフィルタを適用した信号では,サンプリングの定理によって,次のように最大サンプリング間
隔を定める。
− 位相補償ローパスフィルタの振幅伝達率が,0.02 %となる波長よりも短い調和成分を無視してよい場
合には,サンプリングの定理によると,サンプリング間隔は,カットオフ波長の1/7以下となる。
注記2 位相補償ローパスフィルタとは,ガウシアンローパスフィルタをいう。
A.3 平面形体の調和成分
調和解析における各測得方式の特性について,次に示す。
a) 長方形格子状プロービング方式 この方式の特徴は,直交する方向に沿ったデータ密度が高いことで
ある。平面形体全体にわたって高密度なデータが得られる方式ではないが,直交する方向の調和成分
を評価することができる。そのために,この方式は,長方形の平面全体を評価する場合に適用するこ
とを推奨する。
b) 円形格子状プロービング方式 この方式の特徴は,半径方向及び円周方向に沿ったデータ密度が高い
a
b
c
6
B 0684-2:2019
ことである。平面全体にわたる高密度なデータが得られる方式ではないが,半径方向及び円周方向の
調和成分を評価することができる。そのために,この方式は,円形の平面全体を評価する場合に適用
することを推奨する。
c) 三角形格子状プロービング方式 この方式の特徴は,三角形格子の方向に沿ったデータ密度が高いこ
とである。平面全体にわたる高密度なデータが得られる方式ではないが,三角形格子方向又は三方向
の調和成分を評価することができる。そのために,この方式は,長方形格子式及び極座標格子式に代
わって平面全体を評価する場合に適用することを推奨する。
d) ユニオンジャック状プロービング方式 この方式は,平面全体にわたるプロービングではないが,ユ
ニオンジャックの模様を表す方向に沿った調和成分を評価することができる。得られる平面度曲線は,
少数であり,広い表面をサンプリングするわけではないので,長い波長成分を無視できる場合に,プ
ロービングの時間短縮のために用いる。表面の波長成分が事前に分からない場合には,長方形格子状
プロービング方式,円形格子状プロービング方式,三角形格子状プロービング方式を推奨する。
e) 平行プロービング方式 この方式の特徴は,一方向に沿ったデータ密度が高く,一方向に偏った多く
の調和成分の情報を含むことになる。そのために,この方式は,ある一方向に高次の調和成分をもつ
場合に限って適用することを推奨する。
f)
ランダムプロービング方式 この方式のデータ密度は,一般にa)〜e)に記載の方式よりも低い。その
ため,平面形体の調和成分を評価する能力は低く,フィルタ処理も困難である。そのため,この方式
は,パラメータのおおよその推定値だけを必要とする場合に限って推奨する。
7
B 0684-2:2019
附属書B
(参考)
測得方針
B.1
一般事項
平面形状を確実に評価するためには,測定箇所を適切に選択しなければならない。妥当な測得方針を決
定するには,含まれる調和成分が最も重要になる。また,これらの調和成分によって,理論上必要な最小
測得点密度が決まる。
実際には,与えられた平面形体を理論上の最小測得点密度によって完全に表現することは困難である。
このような状況では,平面形状の評価に関わる全体的な情報ではなく,限定された一部の情報を取得する
測得方針が採られる。この測得方針を具現化する方式として,次のような測得方式が挙げられる。
− 長方形格子状プロービング方式
− 円形格子状プロービング方式
− 三角形格子状プロービング方式,ユニオンジャック状プロービング方式などの特殊な格子状方式
− 平行プロービング方式
− ランダムプロービング方式
上記のいずれの測得方式も,平面のほんの一部のサンプル点を得るにすぎない。したがって,ある評価
を目的として,平面形体を表すのに妥当なデータセットを取得したとしても,異なる測定装置,特殊な測
得方式の実施などの影響で測定結果に差異が生じることがある。各測得方式における調和成分については,
その活用方法に関する幾つかの提言とともにA.3に記載した。
B.2
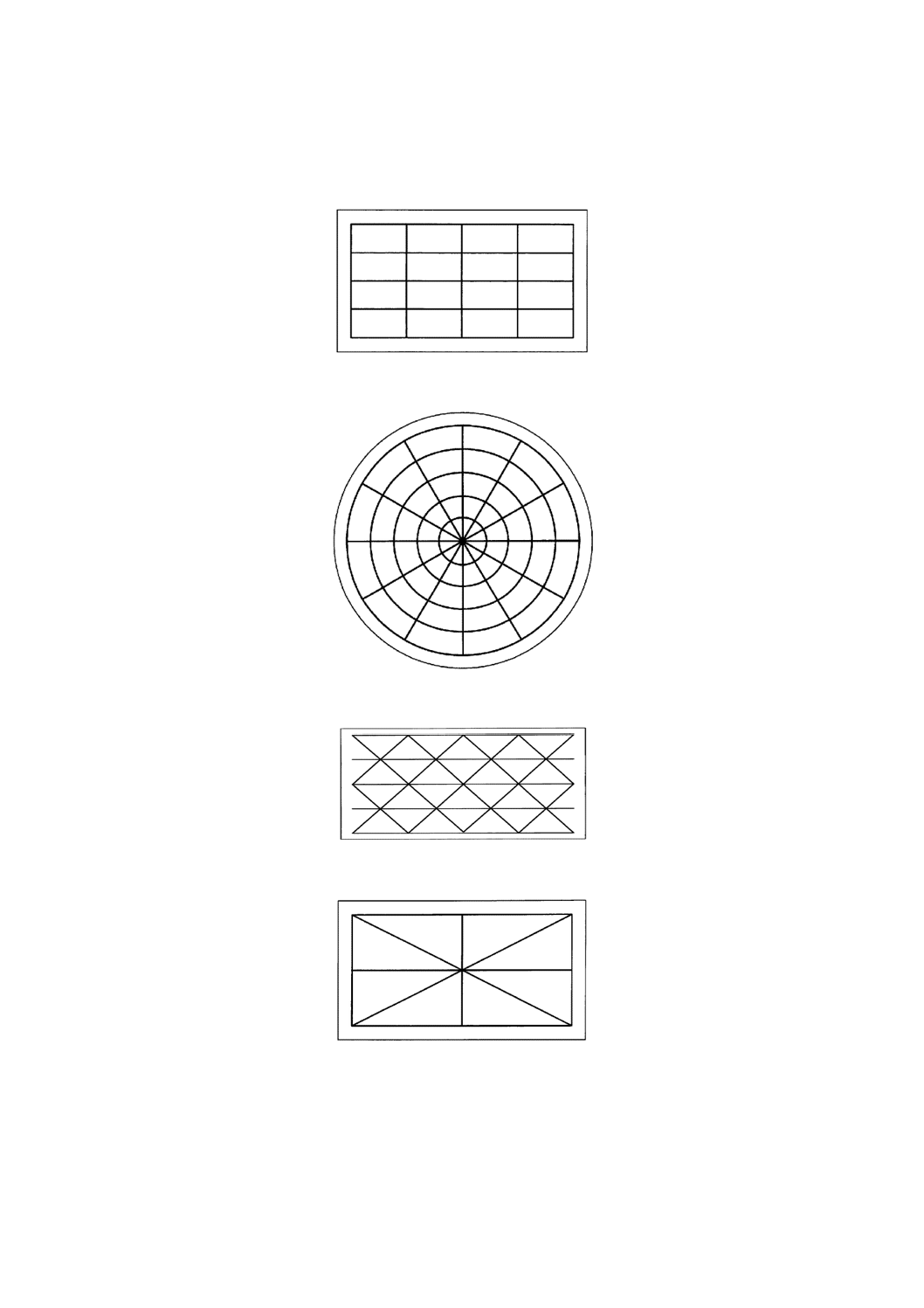
長方形格子状プロービング方式
格子を形成するように,二つの直交した方向に等間隔に配置した直線で構成する方式(図B.1参照)。
B.3
円形格子状プロービング方式
原点を中心として等間隔に分割した同心円上の輪郭と,等角度に分割した放射状の直線とで構成する方
式(図B.2参照)。
B.4
三角形格子状プロービング方式
お互いに60°の角を成すように配置した,三角形格子の三方向の直線で構成する方式(図B.3参照)。
B.5
ユニオンジャック状プロービング方式
ユニオンジャックの模様に配置した縦横三直線の長方形格子と二つの対角線とで構成する方式(図B.4
参照)。
B.6
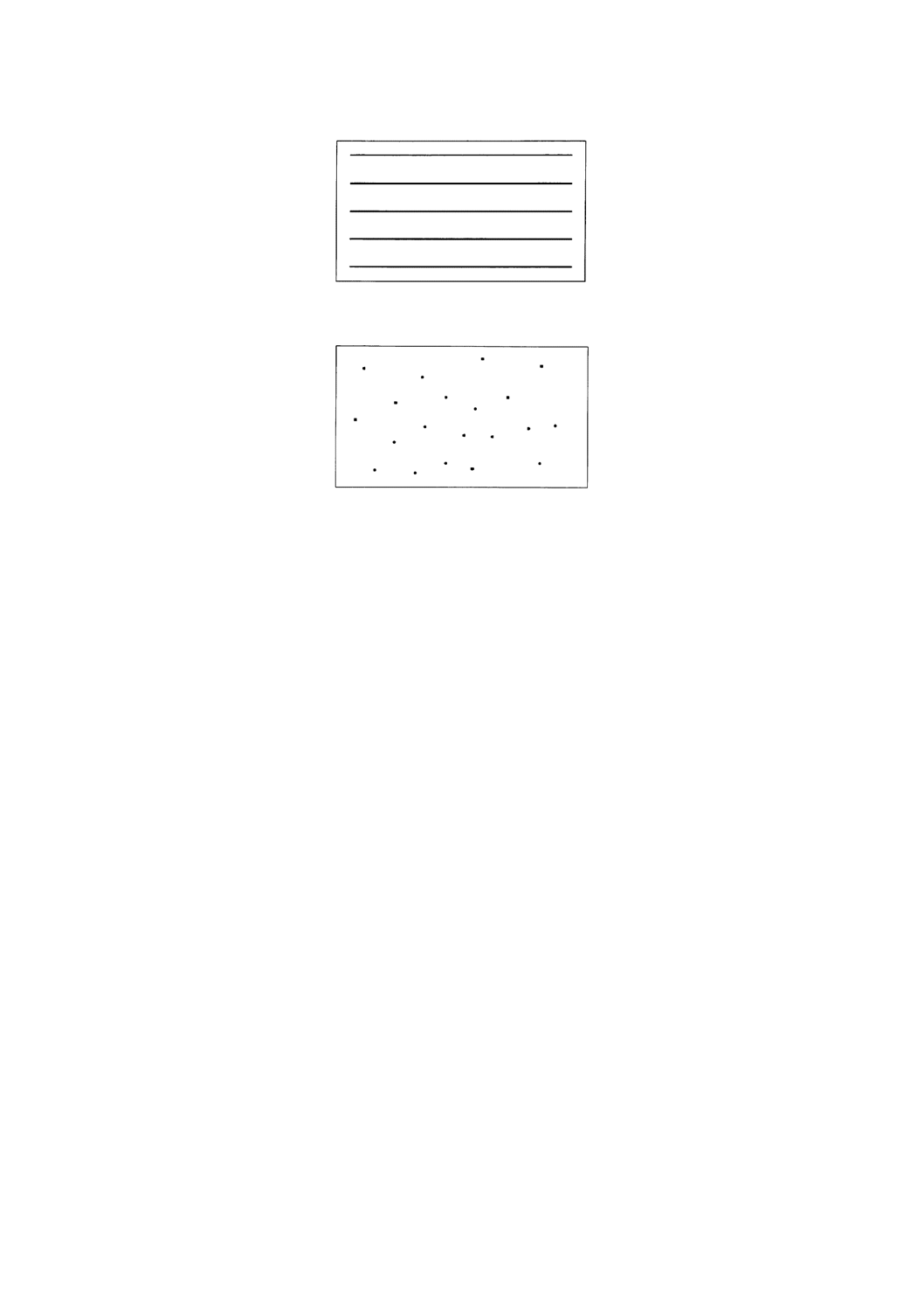
平行プロービング方式
一方向に等間隔に並ぶ,平行な直線で構成する方式(図B.5参照)。
8
B 0684-2:2019
B.7
ランダムプロービング方式
平面上のランダム,又はある特定様式の位置から構成する方式(図B.6参照)。
図B.1−長方形格子状プロービング方式
図B.2−円形格子状プロービング方式
図B.3−三角形格子状プロービング方式
図B.4−ユニオンジャック状プロービング方式
9
B 0684-2:2019
図B.5−平行プロービング方式
図B.6−ランダムプロービング方式
10
B 0684-2:2019
附属書C
(参考)
GPSマトリックスモデル
C.1 一般
GPSのマトリックスモデルの詳細については,ISO/TR 14638:1995を参照。
注記1 ISO/TR 14638:1995は廃止され,ISO 14638:2015として発行されている。
注記2 ISO/GPSマスタープランは,ISO 14638:2015ではGPSマトリックスモデルに対応している。
C.2 規格及びその使用に関する情報
この規格は,ISO 17450-2の規定に従って,外殻形体の平面度に関する用語及び概念について規定する。
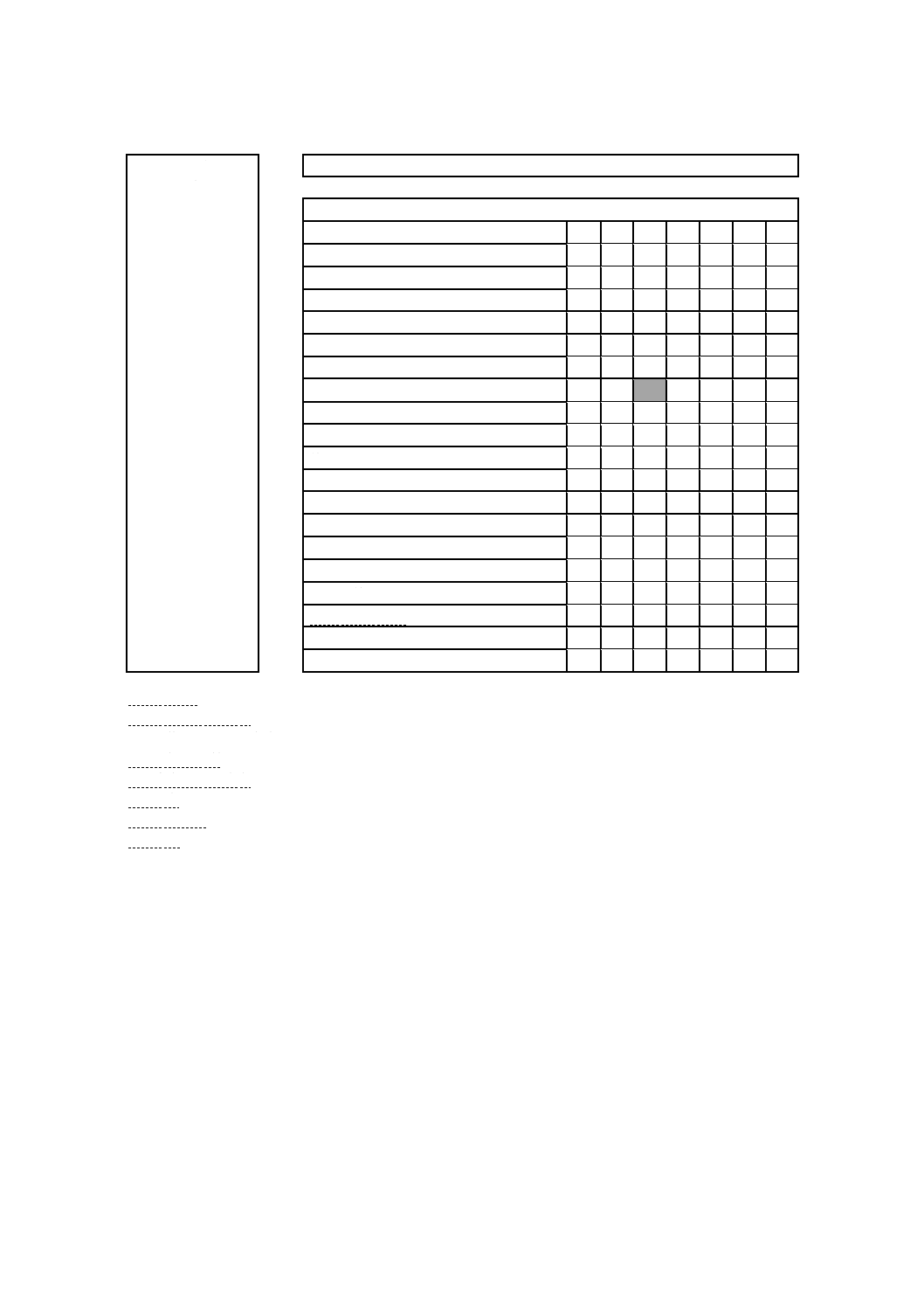
C.3 GPSマトリックスモデルにおける位置付け
この規格は,図C.1の網掛けに示すように,GPSマトリックスのうち,(旧)リンク番号1〜6(ISO/TR
14638:1995)又は(新)リンク記号A〜G(ISO 14638:2015)のデータムに無関係な面の形状規格に関わる
GPS基本規格である。
注記 (新)リンク記号A,B,C,E,F及びGは,(旧)リンク番号1,2,3,4,5及び6に対応し
ている。
11
B 0684-2:2019
GPS原理
規格
GPS共通規格
GPS基本規格
リンク記号
A
B
C
D
E
F
G
サイズ
距離
半径
角度
データムに無関係な線の形状
データムに関係する線の形状
データムに無関係な面の形状
データムに関係する面の形状
姿勢
位置
円周振れ
全振れ
データム
粗さ曲線
うねり曲線
断面曲線
三次元表面性状
表面欠陥
エッジ
リンク記号
A:記号及び指示法
B:形体に対する要求事項
C:形体の性質
D:適合及び不適合
E:測定
F:測定機器
G:校正
図C.1−GPSマトリックスモデルにおける位置付け
C.4 関連規格
関連する国際規格又は日本工業規格は,図C.1に示す規格チェーンの全てである。
12
B 0684-2:2019
参考文献
[1] JIS B 0601:2013 製品の幾何特性仕様(GPS)−表面性状:輪郭曲線方式−用語,定義及び表面性状
パラメータ
注記 対応国際規格:ISO 4287:1997,Geometrical Product Specifications (GPS)−Surface texture: Profile
method−Terms, definitions and surface texture parameters
[2] JIS B 0633:2001 製品の幾何特性仕様(GPS)−表面性状:輪郭曲線方式−表面性状評価の方式及び
手順
注記 対応国際規格:ISO 4288:1996,Geometrical Product Specifications (GPS)−Surface texture: Profile
method−Rules and procedures for the assessment of surface texture
[3] JIS B 0651:2001 製品の幾何特性仕様(GPS)−表面性状:輪郭曲線方式−触針式表面粗さ測定機の
特性
注記 対応国際規格:ISO 3274:1996,Geometrical Product Specifications (GPS)−Surface texture: Profile
method−Nominal characteristics of contact (stylus) instruments
[4] JIS B 0672-1:2002 製品の幾何特性仕様(GPS)−形体−第1部:一般用語及び定義
注記1 対応国際規格:ISO 14660-1:1999,Geometrical Product Specifications (GPS)−Geometrical
features−Part 1: General terms and definitions
注記2 ISO 14660-1:1999は廃止され,ISO 17450-1:2011,Geometrical product specifications (GPS)−
General concepts−Part 1: Model for geometrical specification and verificationに置き換えられた。
[5] JIS B 7440-1:2003 製品の幾何特性仕様(GPS)−座標測定機(CMM)の受入検査及び定期検査−第
1部:用語
注記 対応国際規格:ISO 10360-1:2000,Geometrical Product Specifications (GPS)−Acceptance and
reverification tests for coordinate measuring machines (CMM)−Part 1: Vocabulary
[6] ISO 8015:1985,Technical drawings−Fundamental tolerancing principle
注記 ISO 8015:1985は廃止され,ISO 8015:2011,Geometrical product specifications (GPS)−
Fundamentals−Concepts, principles and rulesに置き換えられた。
[7] ISO 12180-1:2011,Geometrical product specifications (GPS)−Cylindricity−Part 1: Vocabulary and
parameters of cylindrical form
[8] ISO 12180-2:2011,Geometrical product specifications (GPS)−Cylindricity−Part 2: Specification operators
[9] ISO/TR 14638:1995,Geometrical product specification (GPS)−Masterplan
注記 ISO/TR 14638:1995は廃止され,ISO 14638:2015,Geometrical product specifications (GPS)−
Matrix modelに置き換えられた。
13
B 0684-2:2019
附属書JA
(参考)
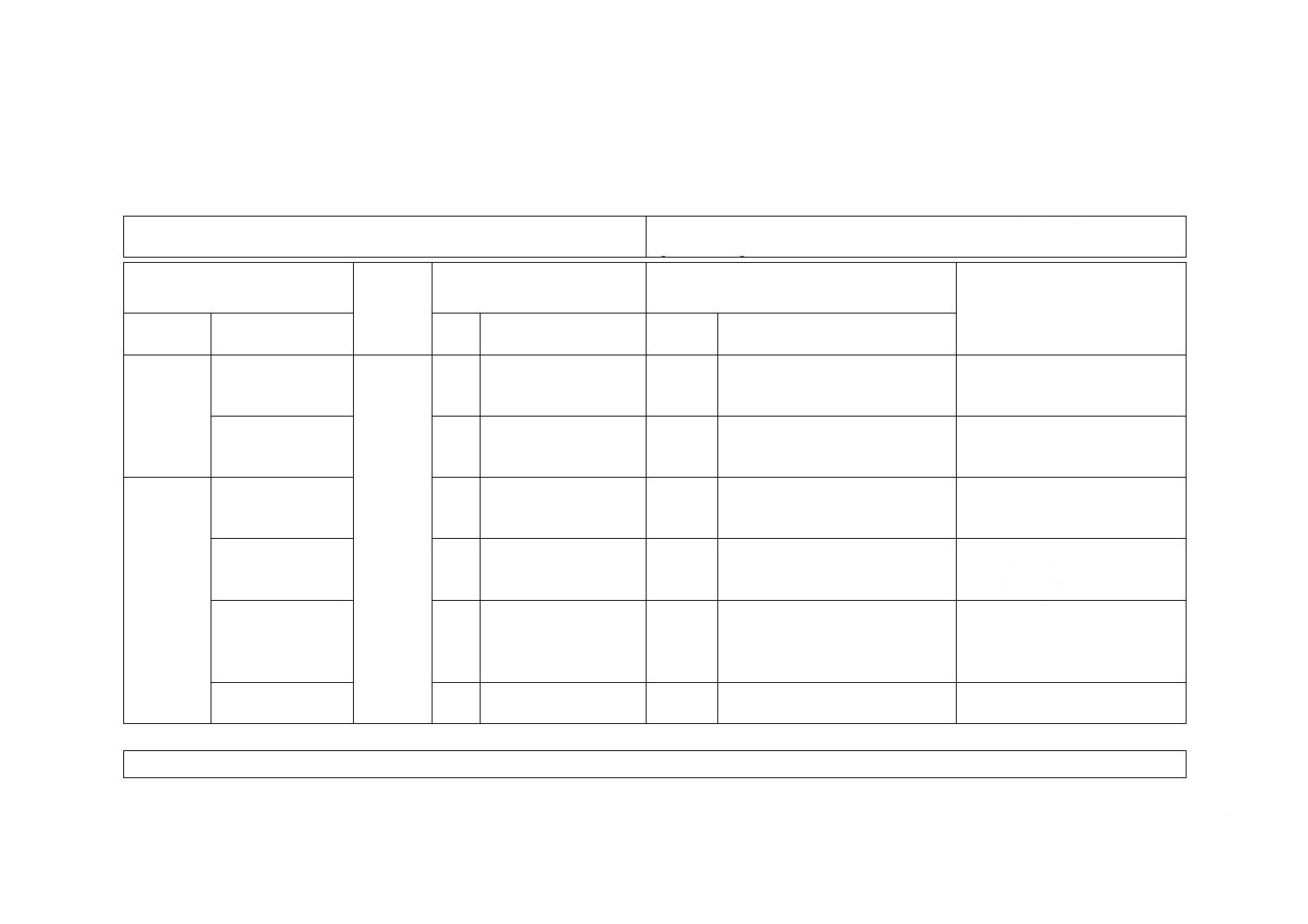
JISと対応国際規格との対比表
JIS B 0684-2:2019 製品の幾何特性仕様(GPS)−平面度−第2部:仕様オペレ
ータ
ISO 12781-2:2011,Geometrical product specifications (GPS)−Flatness−Part 2:
Specification operators
(I)JISの規定
(II)国際
規格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
3 用語及び
定義
3.1 仕様オペレータ
−
−
追加
仕様オペレータの項目及び説明を
追加した。
仕様オペレータの定義がないと使
用者は十分に理解できない。国際
会議で追加を提案する。
3.2 完全な仕様オペ
レータ
−
−
追加
完全な仕様オペレータの項目及び
説明を追加した。
完全な仕様オペレータの定義がな
いと使用者は十分に理解できな
い。国際会議で追加を提案する。
4 完全な仕
様オペレー
タ
4.1 一般事項
測定及びデータ処
理について規定
4
JISとほぼ同じ
変更
3.1及び3.2で既に説明した内容を
削除して整理した。
上記2点の変更に伴う変更であ
る。国際会議で変更を提案する。
4.2 フィルタ
フィルタ特性につ
いて規定
−
−
追加
フィルタ特性に関する項目及び説
明を追加した。
フィルタ特性に関する説明がない
と使用者は理解できない。国際会
議で追加を提案する。
4.3.1 プロービング
プロービングの定
義
−
−
追加
プロービングの定義を追加した。
プロービングシステムとプロービ
ングとの間の概念をつなぐために
必要である。国際会議で追加を提
案する。
4.3.2 プローブの定
義
−
−
追加
プローブの定義を追加した。
上記と同様の理由で追記した。
JISと国際規格との対応の程度の全体評価:ISO 12781-2:2011,MOD
2
B
0
6
8
4
-2
:
2
0
1
9
14
B 0684-2:2019
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
B
0
6
8
4
-2
:
2
0
1
9