B 0186:2020 (ISO 19649:2017)
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
3.1 移動ロボットに関する一般用語 ························································································ 1
3.2 移動機構に関する用語 ···································································································· 2
3.3 車輪移動ロボットに関する用語 ························································································ 2
3.4 脚移動ロボットに関する用語 ··························································································· 3
3.5 移動機能に関する用語 ···································································································· 3
3.6 ナビゲーションに関する用語 ··························································································· 4
附属書A(参考)事例 ··········································································································· 6
B 0186:2020 (ISO 19649:2017)
(2)
まえがき
この規格は,産業標準化法第16条において準用する同法第12条第1項の規定に基づき,一般社団法人
日本ロボット工業会(JARA)及び一般財団法人日本規格協会(JSA)から,産業標準原案を添えて日本産
業規格を改正すべきとの申出があり,日本産業標準調査会の審議を経て,経済産業大臣が改正した日本産
業規格である。これによって,JIS B 0186:2003は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本産業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本産業規格 JIS
B 0186:2020
(ISO 19649:2017)
移動ロボット−用語
Mobile robots-Vocabulary
序文
この規格は,2017年に第1版として発行されたISO 19649を基に,技術的内容及び構成を変更すること
なく作成した日本産業規格である。
産業及び非産業の両分野に応用される移動ロボットは増加しつつあり,移動ロボットに関する用語を定
義する必要性は高まっている。JIS B 0134はロボットに関する基本的用語を定義しているが,移動ロボッ
トに関する用語は十分に定義していない。この規格は,JIS B 0134の定義を基に,移動架台及び移動ロボ
ットについての用語を定義する。
1
適用範囲
この規格は,固体表面の上を移動し,産業用ロボット及びサービスロボットの両分野において作業する
移動ロボットに関する用語及び定義について規定する。この規格では,移動ロボットのモビリティ,移動
機能,ナビゲーション,その他に関する用語について定義する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 19649:2017,Mobile robots−Vocabulary(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
この規格には,引用規格はない。
3
用語及び定義
用語及び定義は,次による。
3.1
移動ロボットに関する一般用語
番号
用語
定義
対応英語(参考)
3.1.1
移動ロボット
自動制御の下に移動することができるロボット。
注記 移動ロボットには,マニピュレータをもつ移動架台も,も
たない移動架台もある。
(JIS B 0134:2015の2.13参照)
mobile robot
2
B 0186:2020 (ISO 19649:2017)
番号
用語
定義
対応英語(参考)
3.1.2
移動架台
移動ロボットの移動機能を実現する全ての構成部分を組み立て
てできる架台。
注記1 移動架台は,負荷を支持する(載せる)車体を含むこと
がある。
注記2 ベースとの混同を避けるために,移動ベースを移動架台
の意味で用いることは避けるのがよい。
(JIS B 0134:2015の3.18参照)
mobile platform
3.1.3
モビリティ
移動架台がその環境内を移動する能力。
注記 モビリティは,尺度として用いられることもある。例えば,
全方向移動機構は,通常,差動駆動車輪機構よりも高いモ
ビリティをもつ。
mobility
3.1.4
ステアリング
移動架台の移動方向の制御。
steering
3.1.5
コンフィギュレー
ション,
姿容(しよう)
ある時刻の全てのジョイントの値の集合であり,ロボットの形状
を完全に決定するもの。
(JIS B 0134:2015の3.5参照)
configuration
3.1.6
基本姿勢
移動架台の特定のコンフィギュレーションであり,製造業者が定
義するもの。
例 車輪移動ロボットの操だ(舵)角0のコンフィギュレーショ
ン,脚ロボットの特定の静止状態のコンフィギュレーション
alignment
configuration,
reference
configuration
3.1.7
移動面
移動ロボットがその上を移動する地表面。
(JIS B 0134:2015の7.7参照)
travel surface
3.1.8
移動面接触面,
接地面
1個の又はそれ以上の車輪,履帯又は脚が移動面と接触する面積。 travel surface contact
area,
ground contact area
3.1.9
支持多角形
全ての接地面を内包する最小の凸図形。
support polygon
3.1.10
移動機能
移動架台が自力推進によって移動すること,又はその機能。
locomotion
3.1.11
タレット
移動架台に据え付けた回転構造で,その上に取り付けた装置に独
立した姿勢を与えるもの。
turret
3.2
移動機構に関する用語
番号
用語
定義
対応英語(参考)
3.2.1
サスペンション
移動面からの衝撃又は振動を吸収するシステム又は構造。
注記 サスペンションの目的には,移動架台の安定性を保持し,
移動面との接触を保ちつつ移動面の凹凸を克服することが
あり得る。
suspension
3.2.2
アクティブサスペ
ンション
減衰特性及び/又はばね特性を制御できるサスペンション。
active suspension
3.2.3
ゼロモーメントポ
イント,
ZMP
支持多角形上の点で,その点に関して,移動面から移動ロボット
に働く全ての力による合成モーメントの水平方向の成分が0であ
るもの。
Zero Moment Point,
ZMP
3.3
車輪移動ロボットに関する用語
番号
用語
定義
対応英語(参考)
3.3.1
操だ(舵)輪
移動方向を変更するために姿勢を制御することができる車輪。
steer wheel,
steered wheel
3.3.2
駆動輪
移動架台を推進する車輪。
drive wheel,
driving wheel
3.3.3
従動輪
移動架台を推進せず,かつ,能動的に操だ(舵)されない車輪。 idler wheel,
follower,
trailing wheel
3
B 0186:2020 (ISO 19649:2017)
番号
用語
定義
対応英語(参考)
3.3.4
キャスタ
きょう(筐)体の中に1個又はそれ以上の車輪を含む組立物で,
その車輪の回転軸から水平方向にオフセットをもつ鉛直軸の回
りに自由に回転できるもの。
swivel castor,
castor
3.3.5
全方向移動輪
外周にローラを配置した車輪で,車輪に垂直な方向をも含み任意
の方向へ変位することを可能にするもの。
例 オムニホイール(ローラを車軸に対して90°の角度で配置),
メカナム(ローラを車軸に対して45°の角度で配置)。
注記 全方向移動機構は,3個以上の全方向移動輪を用いて構成
されることが多い。
omni-directional
wheel
3.3.6
全方向移動機構
移動ロボットの瞬時の移動を任意の方向に設定できる車輪機構。
(JIS B 0134:2015の3.19参照)
omni-directional
mobile mechanism
3.3.7
差動駆動
一つの軸に沿う駆動輪を独立に制御し,駆動輪の速度の和が移動
架台の並進を,速度の差が移動架台の回転を生じるような運動制
御の機構及び方法。
注記 この用語は,クローラロボットにも適用可能である。
differential drive
3.4
脚移動ロボットに関する用語
番号
用語
定義
対応英語(参考)
3.4.1
歩容
脚移動における脚の周期的運動のパターン。
gait
3.4.2
ストライド
脚移動ロボットの歩容の1周期に対する移動距離。
stride length,
stride
3.4.3
歩行周期
歩容の1周期の時間。
walking period,
gait period
3.4.4
脚位相
歩行周期に対する,ある脚の遊脚状態の開始の,基準脚の遊脚状
態の開始からの時間遅れの比。
leg phase
3.4.5
立脚状態,
支持状態
脚が移動面に接触している状態。
support state,
stance state
3.4.6
遊脚状態
脚が移動面に接触していない状態。
swing state,
recovery state,
transfer state
3.4.7
デューティ比
歩行周期に対するある脚の立脚状態の時間の比。
duty factor
3.4.8
歩容図
脚移動について脚の周期的運動を時間軸上で表示した図。
例 四足のクロール歩容の歩容図を図A.1に示す。
gait diagram
3.5
移動機能に関する用語
番号
用語
定義
対応英語(参考)
3.5.1
移動面反力,
接地反力
接地面を通して移動面から移動架台に働く力。
travel surface reaction
force,
ground reaction force
3.5.2
移動面接触圧,
接地圧
車輪,履帯又は脚の接地面を通して移動面から移動架台に働く圧
力。
travel surface contact
pressure,
ground contact
pressure
3.5.3
転倒モーメント
移動ロボットを静的安定なポーズから転倒させるのに必要な最
小のモーメント。
注記 このモーメントは,例えば,傾斜面のような面の状態に依
存する。
overturning moment
3.5.4
トラクション
移動面と移動ロボットの車輪,履帯又は脚との間に生じ得る最大
の摩擦力。
traction
4
B 0186:2020 (ISO 19649:2017)
番号
用語
定義
対応英語(参考)
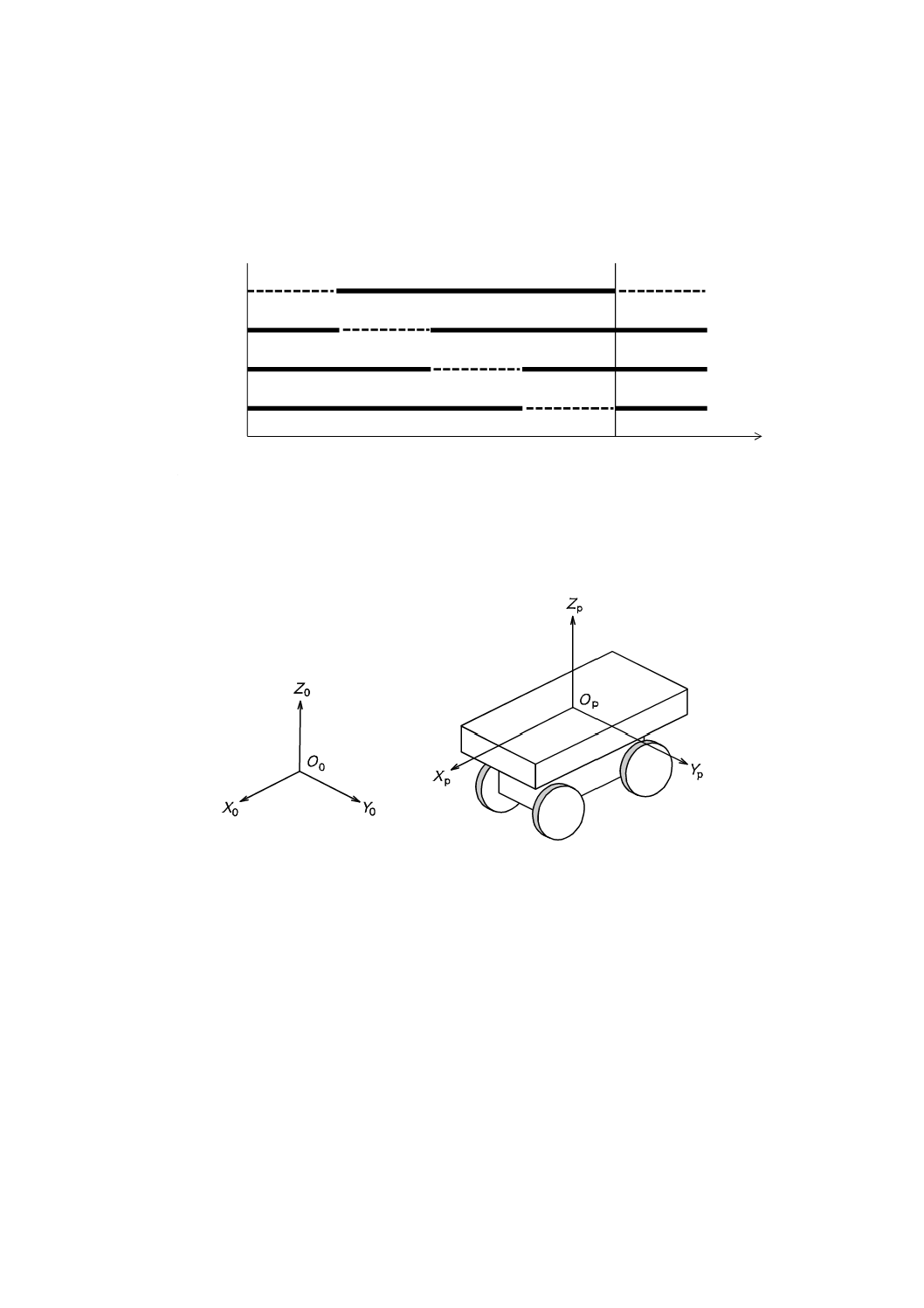
3.5.5
移動架台座標系
移動ロボットの移動架台の一要素に設定した座標系。
注記1 JIS B 8437:2016の5.5で,移動架台座標系Op−Xp−Yp−
Zpを定義する。移動架台座標系の原点Opは,移動架台基
準点とする。+Xp軸は,通常,移動架台の前方向にとる。
+Zp軸は,通常,移動架台の上方向にとる(図A.2参照)。
注記2 上記の注記1は,JIS B 0134:2015の4.7.6の注記を修正
したものである。
(JIS B 0134:2015の4.7.6参照)
mobile platform
coordinate system
3.5.6
操だ(舵)角
操だ(舵)輪の車軸の+Zp軸回りの角度変位。
注記1 操だ(舵)角は通常,車軸が移動架台のYp方向に向いて
いるときは0である。
注記2 移動架台座標系を参照。
steer angle
3.5.7
前進
移動架台の+Xp軸の向きの移動。
注記 移動架台座標系を参照。
forward travel
3.5.8
後進
移動架台の−Xp軸の向きの移動。
注記 移動架台座標系を参照。
reverse travel,
backward travel
3.5.9
横行
移動架台のYp軸に沿っての移動。
注記 移動架台座標系を参照。
traverse,
lateral travel
3.5.10
斜行
前進/後進と横行との組合せである移動架台の移動。
diagonal travel
3.5.11
全方向移動
移動架台の移動であり,その移動方向を全方向移動機構によって
瞬時に任意に変えられるもの。
omni-directional
travel
3.5.12
旋回
移動架台座標系の向きの変化を生じさせる移動架台の移動。
注記1 旋回は,通常,移動架台の移動方向の変化を伴う。
注記2 旋回,ピボットターン及びスピンターンの比較を表A.1
に示す。
turning
3.5.13
ピボットターン
一つの車輪,履帯又は脚の接地点が移動面の1か所にとどまる,
並進を伴う回転。
注記 旋回,ピボットターン及びスピンターンの比較を表A.1に
示す。
pivoting,
pivot turning
3.5.14
スピンターン
その場回転,すなわち,並進を伴わない移動架台基準点の回りの
回転。
注記 旋回,ピボットターン及びスピンターンの比較を表A.1に
示す。
spinning,
spin turning
3.5.15
旋回半径
移動架台基準点の経路の曲率半径。
turning radius
3.5.16
旋回幅
移動架台が,その内側で特定の旋回を完全に行うことができる長
方形の最小幅。
turning width
3.5.17
コーナリングフォ
ース
移動中に遠心力が移動ロボットに及ぼす力。
cornering force
3.5.18
平衡制御
移動ロボットの静的安定性及び動的安定性を維持する過程。
balance control,
balance management
3.6
ナビゲーションに関する用語
番号
用語
定義
対応英語(参考)
3.6.1
ポーズ
空間における位置と姿勢との組合せ。
注記1 マニピュレータのポーズは,通常,エンドエフェクタ又
はメカニカルインタフェースの位置及び姿勢を指す。
注記2 移動ロボットのポーズとは,ワールド座標系における移
動架台のポーズと移動架台に搭載されたマニピュレータ
のポーズとを合わせていうことがある。
(JIS B 0134:2015の4.5参照)
pose
5
B 0186:2020 (ISO 19649:2017)
番号
用語
定義
対応英語(参考)
3.6.2
SLAM
環境中を移動しながら構成途中の地図の特徴を用いて移動ロボ
ットのポーズを認識すると同時に,環境地図を構成し,改良する
こと。
simultaneous
localization and
mapping,
SLAM
3.6.3
誘導
外部情報を提供して移動ロボットのナビゲーションを可能にす
ること。
guidance
3.6.4
経路計画
移動すべきポーズの順序集合を計画すること。
path planning
3.6.5
軌道計画
時間をパラメータとして経路計画を行うこと。
trajectory planning
3.6.6
衝突
運動量の交換を引き起こす動的な接触。
collision
3.6.7
障害物回避
外部状態センサを用いて障害物を検出し,軌道計画を調整するこ
とによって,接近,接触,衝突などのような障害物との干渉を避
けること。
obstacle avoidance
3.6.8
衝突回避
外部状態センサを用い,それに対応することによって,衝突を避
けること。
collision avoidance
3.6.9
ドッキング
所期の作業を行うために,基地,設備又は他の移動架台に接近及
び/又は結合する過程。
注記 所期の作業の例には,充電,データ交換及び荷物の移載が
ある。
docking
3.6.10
慣性航法装置,
INS
慣性センサのデータを処理して移動架台のポーズ及び速度を計
算する装置。
注記 INSは,通常,ジャイロスコープ,加速度計,及び時にコ
ンパス(羅針盤)から構成される慣性計測装置(IMU)を
用いてポーズ及び速度を計算する。
inertial navigation
system,
INS
3.6.11
推測航法,
デッドレコニング
既知の初期ポーズから内界計測だけを用いて移動ロボットのポ
ーズを求める方法。
(JIS B 0134:2015の7.8参照)
dead reckoning
3.6.12
オドメトリ
内部状態センサからの距離増分データを用いて時間にわたって
位置の変化を推定する計測方法。
注記 距離増分データばかりでなく,コンパス(羅針盤)又は慣
性航法装置からの方向情報を用いる場合には,オドメトリ
よりもデッドレコニングが適切な用語である。
odometry
6
B 0186:2020 (ISO 19649:2017)
附属書A
(参考)
事例
左前脚1
(基準脚)
左後脚2
0
脚番号
遊脚状態
立脚状態
右後脚3
右前脚4
1歩行周期
時間
デューティ比は全ての脚について0.75 である。
脚2, 3, 4 の脚位相はそれぞれ0.75, 0.25, 0.5 である。
図A.1−典型的なクロール歩容の歩容図の例
図A.2−移動架台座標系の例
7
B 0186:2020 (ISO 19649:2017)
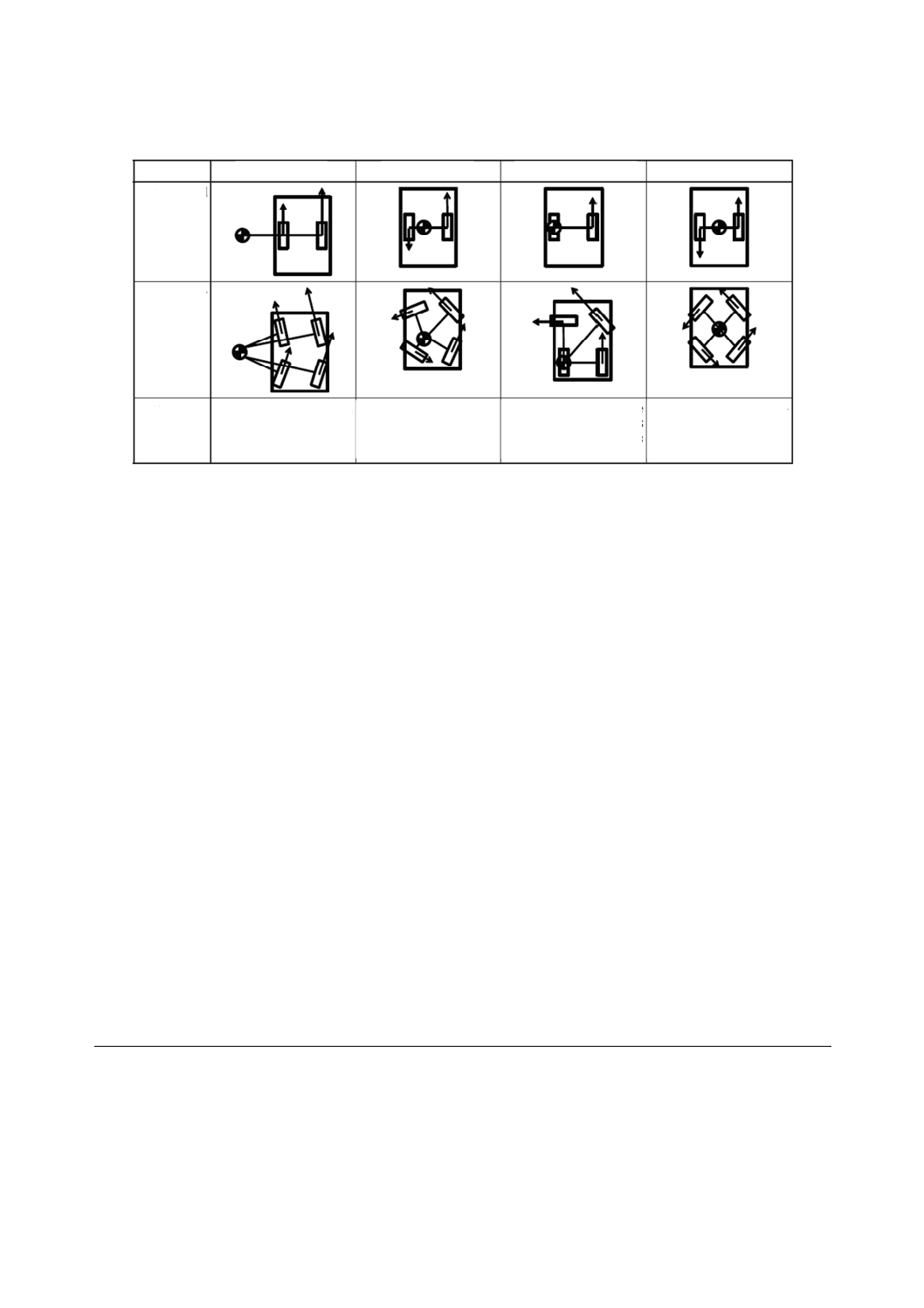
表A.1−旋回,ピボットターン及びスピンターンの比較の例
旋回
旋回
ピボットターン
スピンターン
差動駆
動
全方向
移動
説明
並進を伴う回転
旋回
接地点の一つが
回転中心となる
特殊な旋回
並進を伴わない
回転
参考文献 JIS B 0134:2015 ロボット及びロボティックデバイス−用語
JIS B 8431 産業用マニピュレーティングロボット−特性の表し方
JIS B 8432 産業用マニピュレーティングロボット−性能項目及び試験方法
JIS B 8437:2016 ロボット及びロボティックデバイス−座標系及び運動の記号
JIS B 8445 ロボット及びロボティックデバイス−生活支援ロボットの安全要求事項