2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 0138 - 1996
産業用ロボット−図記号
Industrial robots−Graphical symbols of mechanism
1. 適用範囲 この規格は,産業用ロボットに関して用いる機構を表す図記号及びこれに関連した記号に
ついて規定する。
2. 分類 分類は,次による。
(1) 図記号表示の基本
(2) 機構を表す図記号
(3) 座標系に関する文字記号
3. 記号
3.1
図記号 図記号は,表1及び表2によるほか,次による。
(1) 図記号は,図を読み取るために明りょう,かつ,読みやすい大きさで表示する。
(2) この規格に規定していない機器又はシステムは,これらの記号を組み合わせて表示することができる。
3.2
座標系に関する文字記号 座標系に関する文字記号は,表3による。
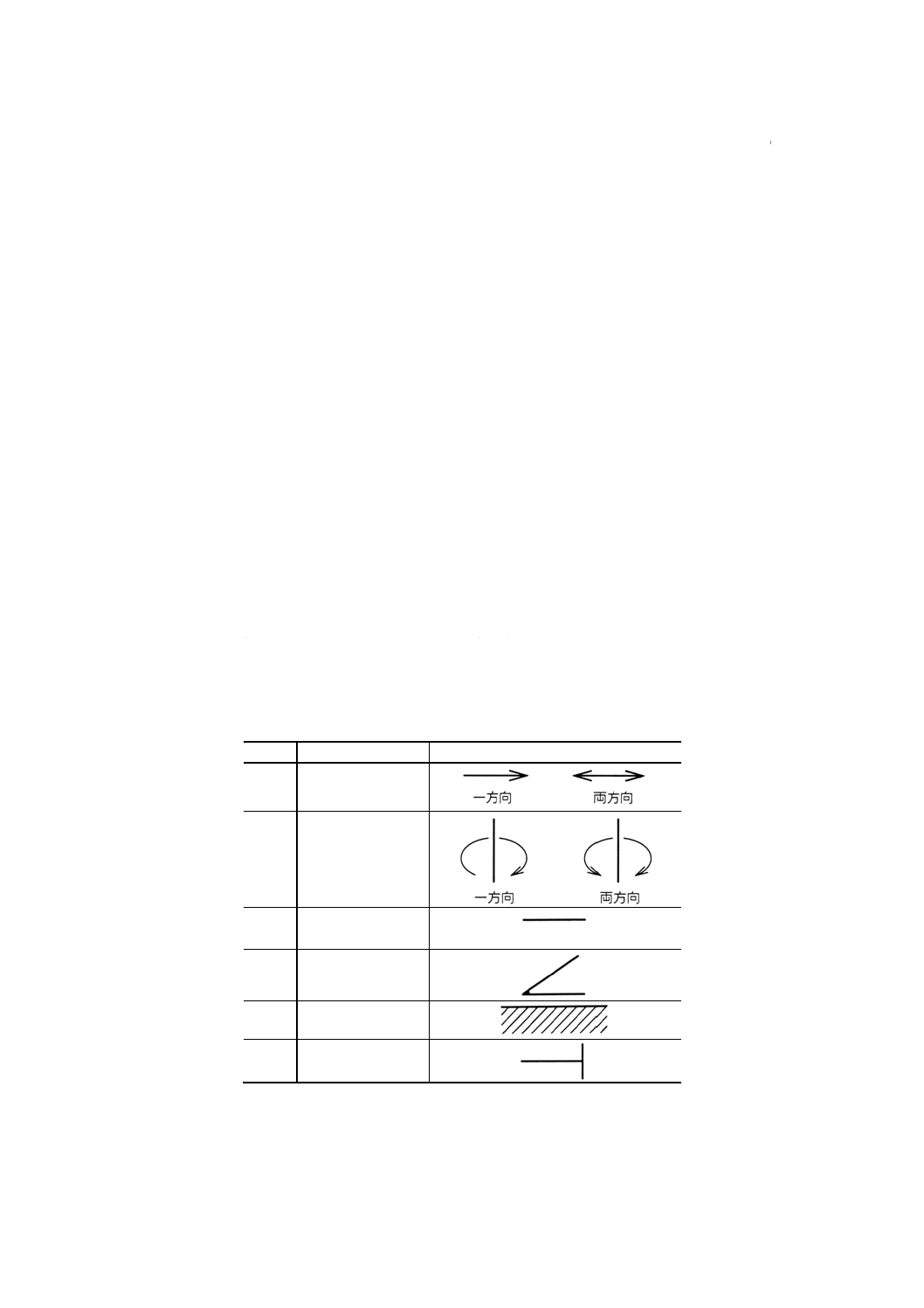
表1 図記号表示の基本
番号
名称
図記号
1
直進の方向
2
回転の方向
3
ジョイント軸,
バー(リンク)
4
リンクの固定結合
5
設置基準面
6
メカニカルインタ
フェース
2
B 0138 - 1996
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
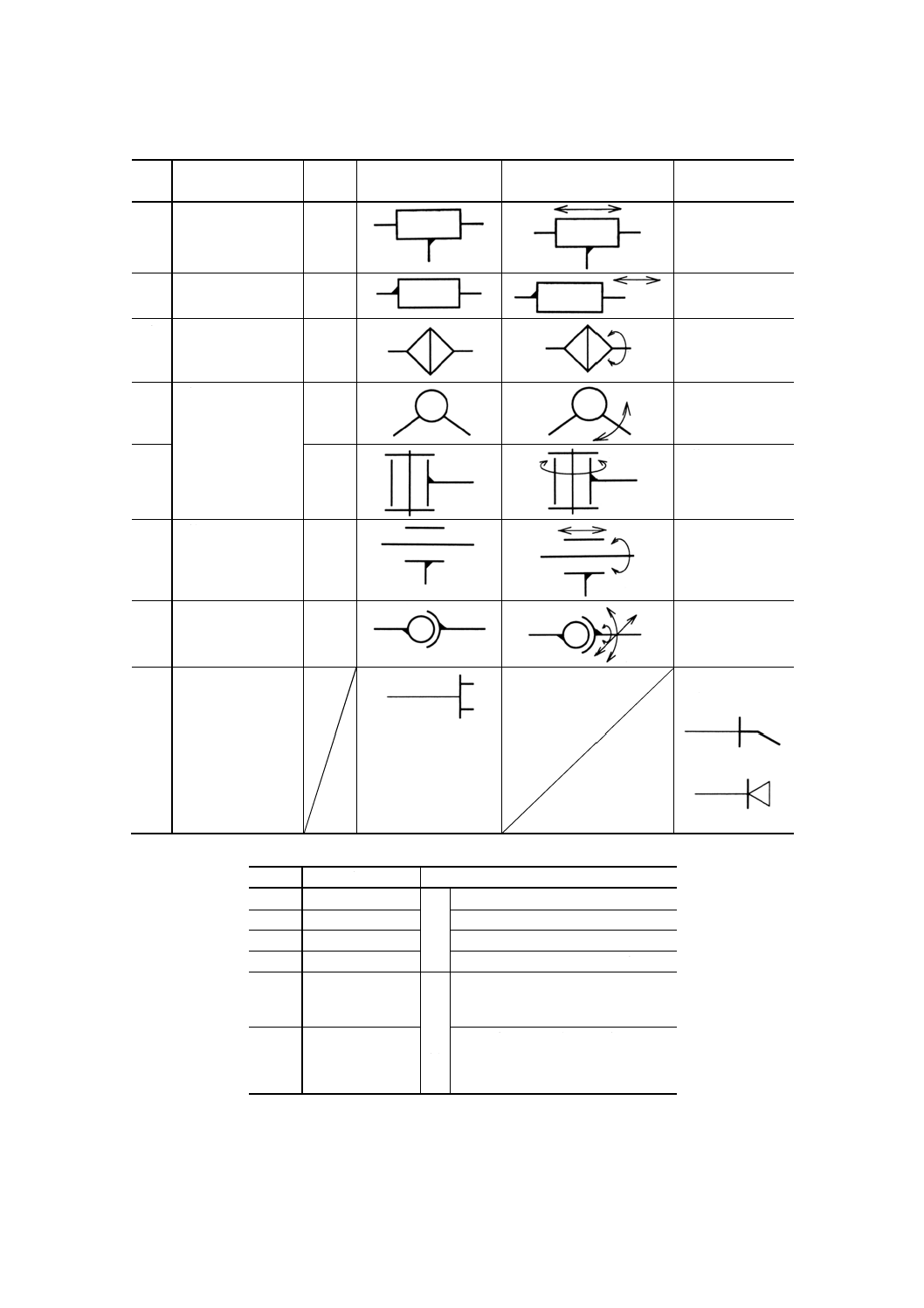
表2 機構を表す図記号
番号
名称
自由度
図記号
運動の方向
(参考)
備考
1
直進ジョイント(1)
1
2
直進ジョイント(2)
1
3
回転ジョイント(1)
1
4
回転ジョイント(2)
1
平面
5
1
立体
6
円筒ジョイント
2
7
球ジョイント
3
8
エンドエフェクタ
一般形
用途別表示例
溶接
真空吸引
表3 座標系に関する文字記号
番号
文字記号
名称
1
X, Y, Z
座
標
系
座標系(一般的表示)
2
X0, Y0, Z0
ワールド座標系
3
X1, Y1, Z1
ベース座標系
4
Xm, Ym, Zm
メカニカルインタフェース座標系
5
X, Y, Z
x, y, z
ロ
ボ
ッ
ト
の
運
動
X, Y, Z軸方向の並進運動
6
A, B, C
X, Y, Z軸周りの単独の回転運動
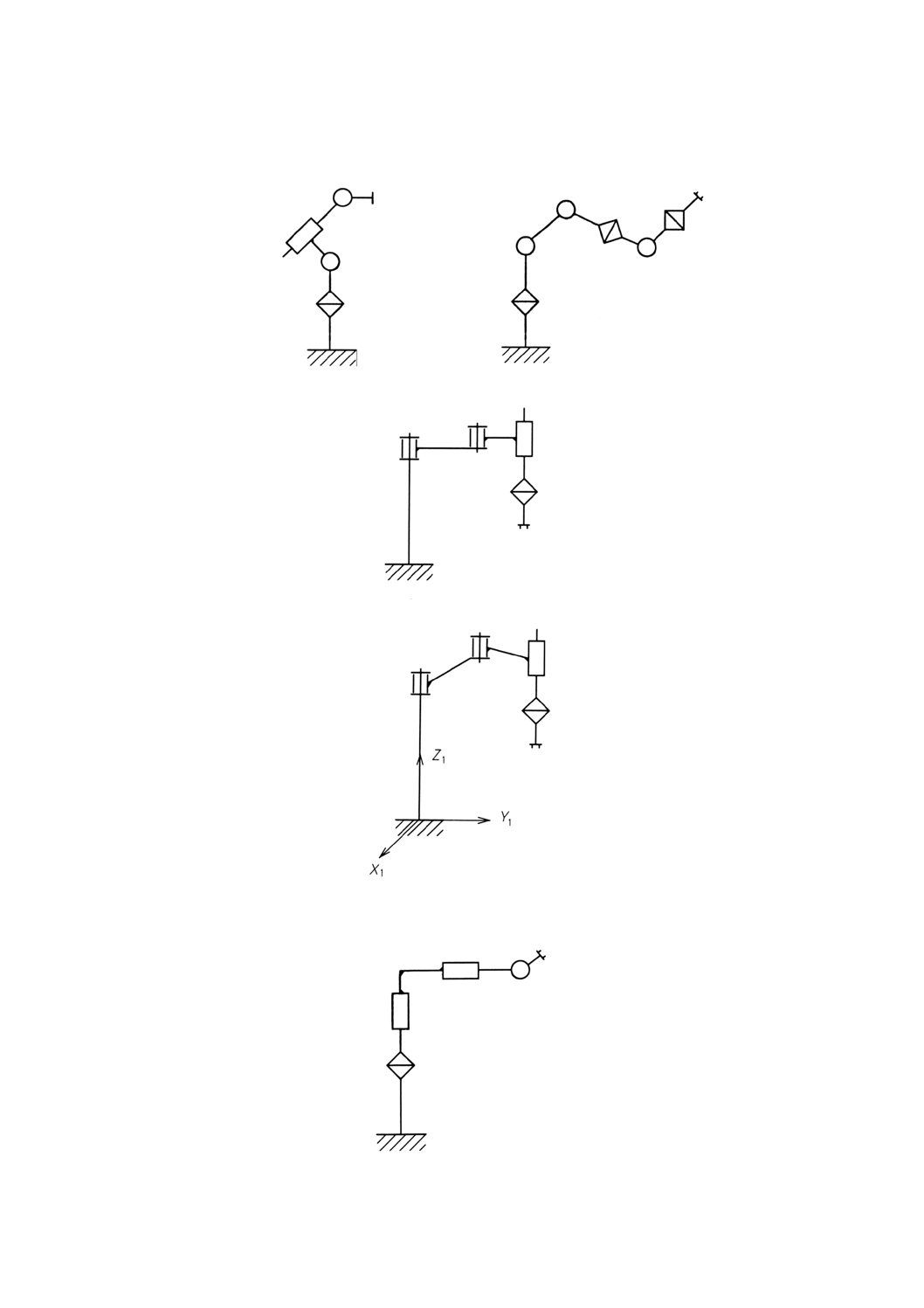
参考 記号の使用例 表1及び表2で定めた図記号を組み合わせて産業用ロボットを表示した例を示
す。立体的表現を分かりやすくするために,座標系を付けることもある(例4,例6,例7)。
3
B 0138 - 1996
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例1 代表的な平面的表現(1)
例2 代表的な平面的表現(2)
例3 水平多関節ロボットの平面的表現
例4 水平多関節ロボットの立体的表現(座標系を付加)
例5 円筒座標ロボットの平面的表現
手首の回転ジョイントは,表2の4を用いている。
4
B 0138 - 1996
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
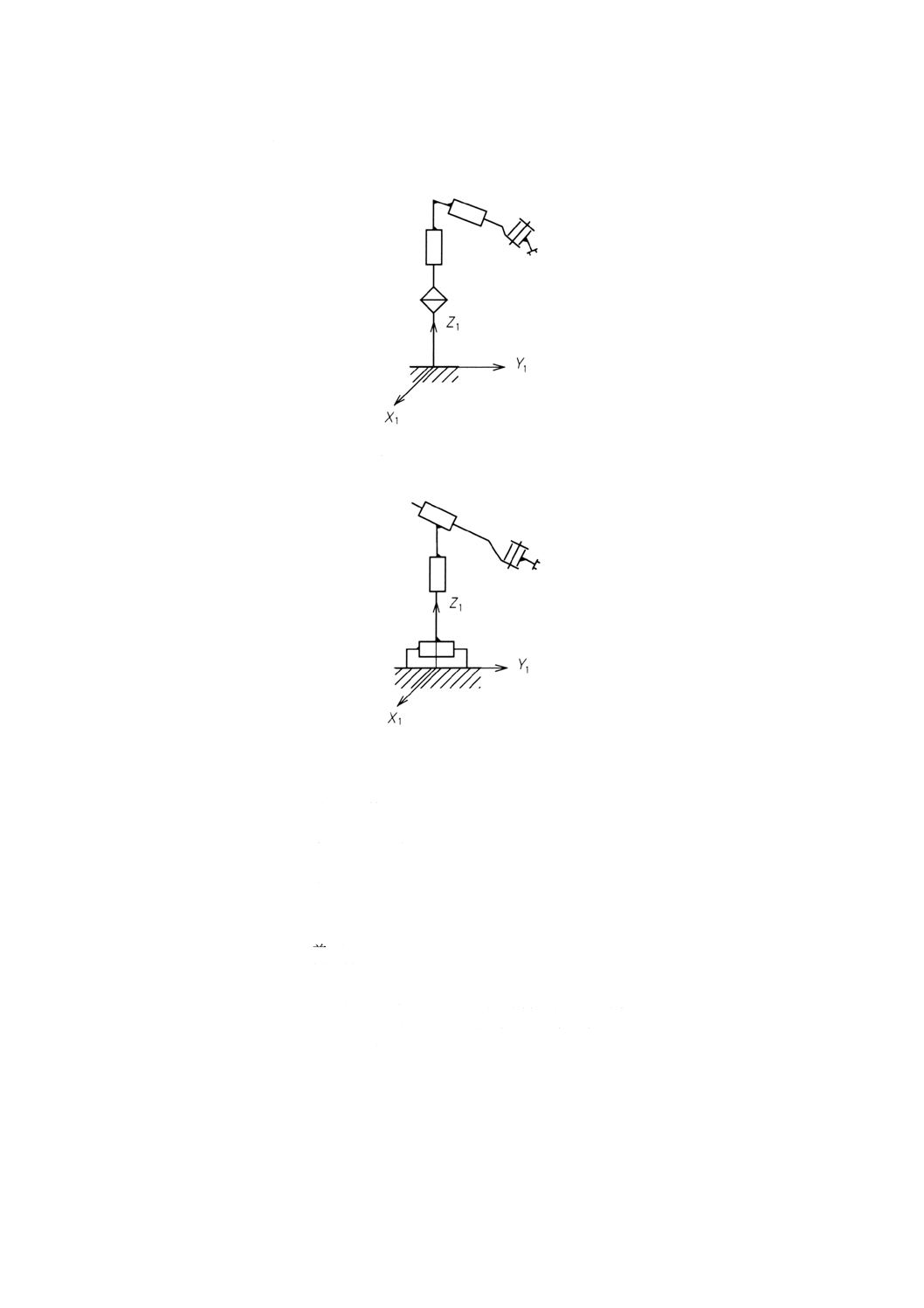
例6 円筒座標ロボットの立体的表現(座標系を付加)
手首の回転ジョイントは,表2の5を用いなければならない。
例7 直角座標ロボット
立体的表現が必要(座標系を付加)
記号JIS改正原案作成専門委員会 構成表
氏名
所属
(委員長)
長谷川 健 介
桐蔭学園横浜大学工学部
下 嶋 浩
東京工業大学工学部
金 子 敏 夫
東京工科大学
松 島 晧 三
桐蔭学園横浜大学工学部
増 田 良 介
東海大学工学部
藤 野 達 夫
通商産業省機械情報産業局
山 村 修 蔵
工業技術院標準部
前 田 祐 司
工業技術院機械技術研究所
黒 澤 豊 樹
黒澤R&D技術事務所
稲 垣 荘 司
技術士事務所ロボティ
小 澤 隆 保
日本電気株式会社制御システム事業部
久 家 重 允
株式会社安川電機ロボット事業部
佐 藤 公 治
社団法人日本ロボット工業会