B 0134:2015 (ISO 8373:2012)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 一般······························································································································· 1
3 機械構造························································································································· 3
4 幾何学及び運動 ················································································································ 5
5 プログラミング及び制御 ···································································································· 7
6 性能······························································································································ 10
7 センシング及びナビゲーション ·························································································· 11
附属書A(参考)ロボットの機械構造形式の例 ········································································· 13
参考文献 ···························································································································· 16
B 0134:2015 (ISO 8373:2012)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
ロボット工業会(JARA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規
格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規
格である。
これによって,JIS B 0134:1998は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 0134:2015
(ISO 8373:2012)
ロボット及びロボティックデバイス−用語
Robots and robotic devices-Vocabulary
序文
この規格は,2012年に第2版として発行されたISO 8373を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
この規格では,製造業並びに非製造業の両環境で運転するロボット及びロボティックデバイスに関する
用語を取り上げ,関連する用語を分類し,定義している。この規格は,ロボットの主なトピックごとにま
とめた各箇条に,最も一般的に用いる用語を定義し,説明している。
1
適用範囲
この規格は,製造業及び非製造業の両環境において運転するロボット及びロボティックデバイスに関す
る用語について規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 8373:2012,Robots and robotic devices−Vocabulary(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
一般
番号
用語
定義
対応英語
2.1
マニピュレータ
互いに連結され相対的に回転又は直進運動する一連の部材で
構成され,対象物(工作物,工具など)をつか(掴)み,通常,
数自由度で動かすことを目的とした機械。
注記1 マニピュレータは,オペレータ,プログラム可能なコ
ントローラ,又は論理システム(カム機構,リレー制
御回路など)によって制御される。
注記2 マニピュレータは,エンドエフェクタを含まない。
manipulator
2.2
自律性
人の介入なしに,現在の状態及びセンシングに基づいて所期の
作業を実行する能力。
autonomy
2.3
ハードウェアの変更
機械システムの変更。
注記 機械システムは,記憶媒体,ROMなどを含まない。
physical alteration
2.4
再プログラム可能
ハードウェアの変更によらず,プログラムによる運動又は補助
機能を変更できるように設計されていること。
reprogrammable
2.5
多目的
ハードウェアの変更によって異なるアプリケーションに使用
できること。
multipurpose
2
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
2.6
ロボット
二つ以上の軸についてプログラムによって動作し,ある程度の
自律性をもち,環境内で動作して所期の作業を実行する運動機
構。
注記1 ロボットは,制御システム及び制御システムとのイン
タフェースを含む。
注記2 ロボットを産業用ロボット又はサービスロボットに分
類するには,所期の用途によるものとする。
robot
2.7
制御システム
ロボットの機械構造の監視・制御及び環境(装置及び使用者)
との通信を可能にする論理制御及び動力機能の全体。
control system
2.8
ロボティックデバイ
ス
産業用ロボット又はサービスロボットの特徴を満たすが,プロ
グラムできる軸数又は自律性の程度に不足のある運動機構。
例 パワーアシスト装置,遠隔操縦装置,2軸の産業用マニピ
ュレータ。
robotic device
2.9
産業用ロボット
自動制御され,再プログラム可能で,多目的なマニピュレータ
であり,3軸以上でプログラム可能で,1か所に固定して又は
移動機能をもって,産業自動化の用途に用いられるロボット。
注記1 産業用ロボットは,次のものを含む。
− マニピュレータ(アクチュエータを含む。)。
− 制御装置[ペンダント及び通信インタフェース(ハ
ードウェア及びソフトウェア)を含む。]。
注記2 産業用ロボットは,統合による追加軸を含む。
industrial robot
2.10
サービスロボット
人又は設備にとって有益な作業を実行するロボット。産業自動
化の用途に用いるものを除く。
注記1 産業自動化の用途には,製造,検査,包装,組立など
がある。
注記2 多関節ロボットは,生産ラインで使われる場合は産業
用ロボットであるが,食事支援に使う場合はサービス
ロボットである。
service robot
2.11
個人用サービスロボ
ット
非商業用作業に使用するサービスロボット。通常,特に訓練を
受けない一般人が運転する。
例 家事ロボット,自動車いす,個人用移動支援ロボット,ペ
ットを運動させるロボット。
personal service
robot,
service robot for
personal use
2.12
業務用サービスロボ
ット
商業用作業に使用するロボットであり,通常,正規の訓練を受
けたオペレータが運転する。
例 公共の場の清掃ロボット,事務所又は病院における配達ロ
ボット,消防ロボット,病院におけるリハビリテーション
ロボット及び手術ロボット。
professional service
robot,
service robot for
professional use
2.13
移動ロボット
自動制御の下に移動することができるロボット。
注記 移動ロボットには,マニピュレータをもつ移動架台も,
もたない移動架台もある。
mobile robot
2.14
ロボットシステム
ロボット,エンドエフェクタ,及び作業実行を支援する機械,
設備,装置,センサなどからなるシステム。
robot system
2.15
産業用ロボットシス
テム
産業用ロボット,エンドエフェクタ,及び作業実行を支援する
機械,設備,装置,外部補助軸,センサなどからなるシステム。
industrial robot
system
2.16
ロボティクス
ロボットの設計,製作,応用に関する学問及び実践。
robotics
2.17
オペレータ
ロボット又はロボットシステムの所期の運転を開始,監視及び
停止する者として指名された人。
operator
2.18
プログラマ
タスクプログラムを用意する者として指名された人。
注記 種々のプログラミング方法は,5.2で定義する。
programmer
3
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
2.19
受益者
サービスロボットとの相互作用によってそのサービスの利益
を受ける者。
注記 これは,受益者とオペレータとを区別するための定義で
ある。
例 医療用ロボットから介護を受ける患者。
recipient,
beneficiary
2.20
据付け(すえつけ)
ロボットをその作業場所に設置し,動力源に接続し,必要に応
じてインフラストラクチャ要素を付加する作業。
installation
2.21
立上げ(たちあげ)
据付けの後に,ロボットシステムを始動・検査し,その後ロボ
ットの機能を検証する処理。
commissioning
2.22
統合
ロボットを他の設備又は機械(追加ロボットを含む)と結合し
て,部品生産のような有益な作業を実行できる機械システムを
構成する行為。
注記 この定義は,当面産業用ロボットにだけ適用する。
integration
2.23
産業用ロボットセル
一つ以上の産業用ロボットシステムで,関連機械・設備,並び
に関連する安全防護空間及び防護手段を含むもの。
industrial robot cell
2.24
産業用ロボットライ
ン
同じ又は異なる機能をもつ二つ以上の産業用ロボットセル及
び関連する設備で,単一の又はつながった安全防護空間内にあ
るもの。
industrial robot line
2.25
協働運転
協働ロボットが,定められた作業空間で人と直接協力して作業
を行う状態。
collaborative
operation
2.26
協働ロボット
人と直接相互作用を行うように設計されたロボット。
collaborative robot
2.27
ロボット協調
複数のロボットの間で情報と動作とを交換することによって,
それらの運動が全体として作業の効率的実行を実現すること。
robot cooperation
2.28
知能ロボット
環境情報の取得及び/又は外部との相互作用を行いつつ,自分
の行動を適応させることによって,作業を実行することができ
るロボット。
例 視覚センサをもち対象物を取り扱う産業用ロボット,障害
物を回避する移動ロボット,不整地を踏破する脚移動ロボ
ット。
intelligent robot
2.29
人間-ロボット相互作
用,
HRI
作業を実行するために,人とロボットとの間でユーザインタフ
ェースによって情報と動作とを交換すること。
例 音声,視覚,触覚の手段を用いた交換。
注記 “HRI”を人間-ロボットインタフェースの略語としてユ
ーザインタフェースの意味で用いることは,混同のおそ
れがあるので避けるのがよい。
human-robot
interaction,
HRI
2.30
妥当性確認
試験及び客観的証拠の提示によって,特定の使用目的に関する
個々の要求事項が満たされていることを確認すること。
注記 JIS Q 9000:2006の3.8.5の定義を適用。
validation
2.31
検証
試験及び客観的証拠の提示によって,要求事項が満たされてい
ることを証明すること。
注記 JIS Q 9000:2006の3.8.4の定義を適用。
verification
3
機械構造
番号
用語
定義
対応英語
3.1
アクチュエータ,
ロボットアクチュエ
ータ
ロボットの運動を発生させる動力機構。
例 電気,油圧,空気圧エネルギーをロボットの運動に変換す
るモータ。
actuator,
robot actuator,
machine actuator
4
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
3.2
腕,
一次軸
マニピュレータのうち,相互連結されたリンクと動力ジョイン
トとの集まりで,長さ方向のリンクを構成し,手首を位置決め
する部分。
robotic arm,
arm,
primary axes
3.3
手首,
二次軸
マニピュレータのうち,相互連結されたリンクと動力ジョイン
トとの集まりで,腕とエンドエフェクタとの間に位置し,エン
ドエフェクタを支持しその位置・姿勢を決める部分。
robotic wrist,
wrist,
secondary axes
3.4
脚
リンク構造であり,往復運動及び移動面との間欠的接触を行う
ことによって,移動ロボットを支持し推進するもの。
robotic leg,
leg
3.5
コンフィギュレーシ
ョン,
姿容(しよう)
ある時刻の全てのジョイントの値の集合であり,ロボットの形
状を完全に決定するもの。
configuration
3.6
リンク
ジョイントによって互いに連結される剛体。
link
3.7
ジョイント
Joints,
joint
3.7.1
直進ジョイント
二つのリンクの相対直進運動を可能にするジョイント。
prismatic joint,
sliding joint
3.7.2
回転ジョイント,
関節
二つのリンクの固定軸の回りの相対回転運動を可能にするジ
ョイント。
rotary joint,
revolute joint
3.7.3
円筒ジョイント
二つのリンクの相対直進運動及びその直進運動方向の軸回り
の相対回転運動を可能にするジョイント。
cylindrical joint
3.7.4
球ジョイント
二つのリンクの固定点の回りの三自由度相対回転運動を可能
にするジョイント。
spherical joint
3.8
ベース
マニピュレータの第一リンクの原点を設定する構造体。
base
3.9
ベース取付面
腕(ベース)とそれを支持する構造体との間の接合面。
base mounting
surface
3.10
メカニカルインタフ
ェース
マニピュレータの先端に設けられた,エンドエフェクタの取付
面。
注記 JIS B 8436及びJIS B 8441参照。
mechanical interface
3.11
エンドエフェクタ
ロボットが作業を行えるように,メカニカルインタフェースに
取り付けて用いる機器。
例 把持部,ナット回し,溶接ガン,スプレーガン。
end effector
3.12
エンドエフェクタ結
合装置
エンドエフェクタを手首に取り付けるための,手首先端のフラ
ンジ又はシャフト,及びロック機構又は付加部品。
end effector
coupling device
3.13
エンドエフェクタ自
動交換装置
メカニカルインタフェースとエンドエフェクタとの間に設け
られ,エンドエフェクタの自動交換を可能にする結合装置。
注記 JIS B 8442参照。
automatic end
effector exchange
system
3.14
把持部(はじぶ),
グリッパ
把握したり保持したりするために設計されたエンドエフェク
タ。
gripper
3.15
ロボットの機械構造
の形式
Types of mechanical
structure of robot
3.15.1
直角座標ロボット
腕に三つの直進ジョイントをもち,それらの軸が直角座標系に
一致するロボット。
例 ガントリロボット(図A.1参照)。
rectangular robot,
Cartesian robot
3.15.2
円筒座標ロボット
腕に少なくとも一つの回転ジョイントと一つの直進ジョイン
トとをもち,それらの軸が円筒座標系を構成するロボット。
注記 図A.2参照。
cylindrical robot
3.15.3
極座標ロボット
腕に二つの回転ジョイントと一つの直進ジョイントとをもち,
それらの軸が極座標系を構成するロボット。
注記 図A.3参照。
polar robot,
spherical robot
5
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
3.15.4
振り子ロボット
ユニバーサルジョイントで旋回する部分を含む極座標ロボッ
ト。
注記 図A.4参照。
pendular robot
3.15.5
多関節ロボット
腕に三つ以上の回転ジョイントをもつロボット。
注記 図A.5参照。
articulated robot
3.15.6
スカラロボット
二つの平行な回転ジョイントをもち,選択された平面内にコン
プライアンスを構成するロボット。
注記 スカラ(SCARA)は,Selectively Compliant Arm for Robotic
Assemblyに由来する。
SCARA robot
3.15.7
スパインロボット
腕が二つ以上の球ジョイントで構成するロボット。
spine robot
3.15.8
パラレルロボット,
並行リンクロボット
腕に閉ループ構造を構成するリンクをもつロボット。
例 スチュワートプラットフォーム。
parallel robot,
parallel link robot
3.16
移動ロボットの機械
構造の形式
Types of mechanical
structure of
mobile robot
3.16.1
車輪移動ロボット
車輪を用いて移動するロボット。
注記 図A.6参照。
wheeled robot
3.16.2
脚移動ロボット
1本以上の脚を用いて移動するロボット。
注記 図A.7参照。
legged robot
3.16.3
二足ロボット
2本の脚を用いて移動するロボット。
注記 図A.8参照。
biped robot
3.16.4
クローラロボット
クローラを移動機構とするロボット。
注記 図A.9参照。
crawler robot,
tracked robot
3.17
人間形ロボット,
ヒューマノイドロボ
ット
胴体,頭部,肢をもち,外観及び動作が人のようなロボット。 humanoid robot
3.18
移動架台
移動ロボットの移動機能を実現する全ての構成部分を組み立
ててできる架台。
注記1 移動架台は,負荷を支持する(載せる)車体を含むこ
とがある。
注記2 ベースとの混同を避けるために,移動ベースを移動架
台の意味で用いることは避けるのがよい。
mobile platform
3.19
全方向移動機構
移動ロボットの瞬時の移動方向を任意に設定できる車輪機構。 omni-directional
mobile mechanism
3.20
無人搬送車,
AGV
あらかじめ路面マーク又は外部誘導指令によって設定した経
路をたどる移動架台であり,工場で使用することが多い。
注記 AGVに関する国際規格は,ISO/TC 110 Industrial trucks
が担当している。
automated guided
vehicle,
AGV
4
幾何学及び運動
番号
用語
定義
対応英語
4.1
順運動学
機械的連結体の二つの部品の座標系の関係を,この連結体の各
ジョイントの値から数学的に求めること。
注記 マニピュレータでは,順運動学は,通常,エンドエフェ
クタ座標系とベース座標系との関係を求めることであ
る。
forward kinematics
6
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
4.2
逆運動学
機械的連結体の各ジョイントの値を,この連結体の二つの部品
の座標系の関係から数学的に求めること。
注記 マニピュレータでは,逆運動学は通常,エンドエフェク
タ座標系とベース座標系との関係から各ジョイントの
値を求めることである。
inverse kinematics
4.3
軸
運動を直進又は回転モードで記述するときの方向ベクトル。
注記 軸は,ロボット機構のジョイントの意味にも使われる。
axis
4.4
自由度
空間において剛体の運動を記述するために必要な変数の数(最
大6)。
注記 混同を避けるために,ロボット機構の運動を記述する軸
数の意味で自由度を用いないのがよい。
degree of freedom,
DOF
4.5
ポーズ
空間における位置と姿勢との組合せ。
注記1 マニピュレータのポーズは,通常,エンドエフェクタ
又はメカニカルインタフェースの位置及び姿勢をさ
す。
注記2 移動ロボットのポーズとは,ワールド座標系における
移動架台のポーズと移動架台に搭載されたマニピュレ
ータのポーズとを合わせていうことがある。
pose
4.5.1
指令ポーズ
タスクプログラムによって指示されるポーズ。
command pose,
programmed pose
4.5.2
実現ポーズ
指令ポーズに応答してロボットが実際にとるポーズ。
attained pose
4.5.3
アライメントポーズ
ロボットの幾何的基準となる特定のポーズ。
alignment pose
4.5.4
経路
ポーズの順序集合。
path
4.6
軌道
経路に時間をパラメータとして付加したもの。
trajectory
4.7
座標系
注記 JIS B 8437参照。
Coordinate systems
4.7.1
ワールド座標系
地面に設定した座標系。ロボットの運動とは独立である。
world coordinate
system
4.7.2
ベース座標系
ベース取付面に設定した座標系。
base coordinate
system
4.7.3
メカニカルインタフ
ェース座標系
メカニカルインタフェースに設定した座標系。
mechanical interface
coordinate system
4.7.4
ジョイント座標系
ジョイント軸に設定した座標系。各ジョイントの座標は先行す
るジョイントの座標に対して又は他の座標系に対して相対的
に決められる。
joint coordinate
system
4.7.5
エンドエフェクタ座
標系,
ツール座標系
メカニカルインタフェースに取り付けたエンドエフェクタ又
は工具に設定した座標系。
tool coordinate
system,
TCS
4.7.6
移動架台座標系
移動ロボットの移動架台の一要素に設定した座標系。
注記 移動ロボットの一般的な移動架台座標系は,前方に+X
軸,上方に+Z軸をとり,+Y軸は右手の法則で決定す
る。
mobile platform
coordinate system
4.8
空間
Spaces
4.8.1
最大空間
ロボットの可動部品が掃引する空間で製造業者が定義したも
のに,エンドエフェクタ及び工作物が掃引する空間を加えたも
の。
注記 移動架台については,最大空間は,理論的に移動によっ
て到達できる容積の全体とみなすことができる。
maximum space
7
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
4.8.2
制限空間
最大空間の一部であり,ロボット動作の限界を設定する制限装
置によって限定されている空間。
注記 移動架台については,制限空間は,床又は壁の特別なマ
ーク又は内部地図上に定義されたソフトウェア制限に
よって限定されることがある。
restricted space
4.8.3
運転空間
制限空間の一部で,タスクプログラムによって指令される全て
の運動を実行するとき実際に使われる部分。
operational space,
operating space
4.8.4
作動空間
手首基準点によって掃引される空間に,手首の各ジョイントの
直進又は回転の範囲を加えた空間。
注記 作動空間は,マニピュレータの全ての可動部品によって
掃引される空間よりも小さい。
working space
4.8.5
安全防護空間
安全防護装置によって囲まれた空間。
safeguarded space
4.8.6
協働作業空間
安全防護空間内の,生産作業中にロボットと人とが同時に作業
を実行することができる作業空間。
注記 この定義は,当分産業用ロボットにだけ適用する。
collaborative
workspace
4.9
TCP,
ツールセンタポイン
ト
与えられたアプリケーションにおいて,メカニカルインタフェ
ース座標系上で定められた点。
TCP, tool centre
point
4.10
手首基準点
最も内側の(すなわち,最も一次軸に近い)二つの二次軸の交
点。交点がない場合は,最も内側の二次軸上において指定され
た点。
wrist reference point,
wrist centre point,
wrist origin
4.11
移動架台基準点
移動架台座標系の原点。
mobile platform
origin,
mobile platform
reference point
4.12
座標変換
ポーズの座標を,ある座標系から他の座標系に変換する処理。 coordinate
transformation
4.13
特異点
直角座標系における経路速度を維持しようとしたとき,ジョイ
ント空間におけるジョイント速度が数学的には無限大となる
点。この点では運動学から導出されるヤコビ行列のランクがフ
ルランクより小さくなる。
注記 実際の作業では,直角座標空間で定義され特異点の近く
を通る運動は,高い軸速度を発生することがある。この
高速度は,オペレータにとっては予想できないことがあ
る。
singularity
5
プログラミング及び制御
番号
用語
定義
対応英語
5.1
プログラム
Program
5.1.1
タスクプログラム
ロボット又はロボットシステムが所期のタスクを実行するた
めの運動及び補助機能を行わせる命令の集まり。
注記1 この種のプログラムは,通常,ロボットの据付け後に
作成されるものであり,訓練を受けた者は一定の条件
の下でそれを修正することができる。
注記2 アプリケーションは仕事の一般的な範囲を指し,タス
クはアプリケーションの中の特定の仕事を指す。
task program
8
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
5.1.2
制御プログラム
ロボット又はロボットシステムの能力,動作,応答を規定する
固有の制御命令の集まり。
注記 この種のプログラムは,通常,据付けの前に作成され,
その後は製造業者だけが修正する。
control program
5.2
プログラミング
Programming
5.2.1
タスクプログラミン
グ
タスクプログラムを作成する行為。
task programming,
programming
5.2.2
マニュアルデータ入
力プログラミング,
MDI
スイッチ,配線盤,キーボードなどを用いてプログラムを作成
しロボット制御システムに直接格納すること。
manual data input
programming,
MDI
5.2.3
教示プログラミング,
教示
ロボットのエンドエフェクタ又は模擬機構を手で又はペンダ
ントを用いて動かし,ロボットに所望の位置を1ステップずつ
たどらせることによってプログラムを作成すること。
teach programming
5.2.4
オフラインプログラ
ミング
タスクプログラムをロボットとは別の装置の上で作成し,その
後にロボットに格納するプログラミング方法。
off-line
programming
5.2.5
作業指示プログラミ
ング
ロボットの経路を指定しなくても,実行させるタスクを規定す
ることによってタスクプログラムを作成する方法。
goal-directed
programming
5.3
制御
Control
5.3.1
PTP制御
ロボットが通過させる指令ポーズだけを指定し,ポーズ間でた
どるべき経路を指定しない制御方式。
pose-to-pose control,
PTP control
5.3.2
CP制御
ロボットに指令ポーズの間でたどらせる経路を指定する制御
方式。
continuous path
control,
CP control
5.3.3
軌道制御
CP制御で,速度パターンをプログラムできるもの。
trajectory control
5.3.4
マスタスレーブ制御
一次装置(マスタ)の運動を二次装置(スレーブ)に再生させ
る制御方式。
注記 マスタスレーブ制御は,遠隔操作に用いることが多い。
master-slave control
5.3.5
感覚制御
ロボットの運動又は力が外界センサの出力に従って調整され
る制御方式。
sensory control
5.3.6
適応制御
制御系のパラメータが作業実行中に検出される状況に基づい
て調整される制御方式。
adaptive control
5.3.7
学習制御
以前のサイクルで得られた経験を下に,制御パラメータ及び/
又はアルゴリズムを自動的に変更する制御方式。
learning control
5.3.8
運動計画
ロボット制御プログラムが,使用者が指定した指令ポーズの間
で,選択した補間型式に従って機構のジョイントの動きを決め
る処理。
motion planning
5.3.9
コンプライアンス
ロボット又は付随する工具がそれに働く外力に応答して変位
する振る舞い。
注記 振る舞いがセンサフィードバックに依存する場合は能
動コンプライアンスであり,依存しない場合は受動コン
プライアインスである。
compliance
5.3.10
運転モード
ロボット制御システムの状態。
operating mode,
operational mode
5.3.10.1 自動モード
設定したタスクプログラムに従ってロボット制御システムが
動作する運転モード。
automatic mode
5.3.10.2 手動モード
ロボットを,自動モードではなく,押しボタン,ジョイスティ
ックなどによって操作する運転モード。
manual mode
5.4
サーボ制御
ロボット制御システムが,実現ポーズを指令ポーズに一致させ
るようにロボットのアクチュエータを制御する処理。
servo-control
9
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
5.5
自動運転
ロボットがタスクプログラムを所定のとおり実行している状
態。
automatic operation
5.6
停止点
ロボットの核軸に,速度指令0,位置決め偏差なしの条件で到
達させる指令ポーズであり,教示又はプログラムで設定する。
stop-point
5.7
フライバイポイント,
経由点
ロボットの各軸が一定の偏差をもって到達させる指令ポーズ
であり,教示又はプログラムで設定される。偏差の値は,この
ポーズの前後の軸速度のパターン,及び所定の通過基準(速度,
位置偏差)によって決まる。
fly-by point,
via point
5.8
ペンダント,
教示ペンダント
制御システムに接続して,ロボットにプログラムを教示し,又
はロボットを動作させることのできる手持ちユニット。
pendant,
teach pendant
5.9
ジョイスティック
手動制御する装置で,その位置,姿勢,加えられる力などが計
測されロボット制御システムへの指令となるもの。
joystick
5.10
遠隔操作,
遠隔操縦
人が遠隔の場所から実時間でロボット又はロボティックデバ
イスの運動を制御すること。
例 爆弾処理,宇宙ステーションの組立,水中での検査,手術
などにおけるロボット操縦。
teleoperation
5.11
プレイバック運転
ロボットに,教示プログラミングによって格納したタスクプロ
グラムを繰り返し実行させる運転方法。
playback operation
5.12
ユーザインタフェー
ス
人間-ロボット相互作用の中で,人とロボットとの間で情報及
び動作の交換を行うための手段。
例 マイクロフォン,スピーカ,グラフィカルユーザインタフ
ェース,ジョイスティック,ハプティック装置。
user interface
5.13
ロボット言語
タスクプログラムを記述するためのプログラム言語。
robot language
5.14
同時動作
単一制御ステーションの制御下において2台以上のロボットが
同時に行う動作であり,共通の数学的関連下で協調して又は同
期して行うことがある。
注記1 単一制御ステーションの例として,ペンダントがある。
注記2 協調は,マスタスレーブ制御として実現されることが
ある。
simultaneous motion
5.15
制限装置
ロボットの全ての動作を直接的・間接的に停止させることによ
って最大空間を制限(し制限空間を形成)する手段。
limiting device
5.16
プログラム検証
ロボットの経路及び作業性能を確認するためのタスクプログ
ラムの実行。
注記 プログラム検証は,タスクプログラムの実行の間にエン
ドエフェクタ中心点がたどる全経路について,又は経路
の一部について行ってもよい。命令は,単一命令ごとに,
又は連続した一連の命令で実行してもよい。プログラム
検証は,新しいアプリケーションにおいても,既存のア
プリケーションの微細調整・編集においても用いる。
program verification
5.17
保護停止
安全防護の目的で動作を停止するときに再起動を容易にする
ためにプログラム論理を保持する形式の運転の中断。
protective stop
5.18
安全適合
所定の安全関連の性能を満たすことによって規定の安全機能
を実現していること。
例 安全適合低減速度,安全適合監視速度,安全適合出力。
safety-rated
5.19
単一制御点
ロボット動作の始動・制御変更が一つの制御源からだけ可能で
あり,運転途中で他の制御源から始動・制御変更が行えないよ
うな運転方法。
single point of
control
10
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
5.20
低減速度制御,
低速制御
ロボットの速度を250 mm/s以下に制限する動作制御モード。
注記1 低減速度は,人がロボットの危険な運動から身を引く
か,又はロボットを停止することができるように十分
な時間を与えるためのものである。
注記2 この定義は,当面,産業用ロボットにだけ適用する。
reduced speed
control,
slow speed control
6
性能
番号
用語
定義
対応英語
6.1
正常運転条件
ロボットの性能に影響を与える環境条件及び他のパラメータ
(供給電源の不安定性,電磁場など)の通常の範囲。製造業者
の規定するロボット性能は,この範囲内で有効である。
注記 環境条件には,温度,湿度などが含まれる。
normal operating
conditions
6.2
負荷
Load
6.2.1
負荷
メカニカルインタフェース又は移動架台に加えられる力及び
トルク。これらは,所定の速度・加速度条件下における種々の
方向の運動に沿って加えられる。
注記 負荷は,ロボットが支持する質量,慣性モーメント,及
び静的・動的な力の関数である。
load
6.2.2
定格負荷
正常運転条件の下で,性能仕様を損なうことなくメカニカルイ
ンタフェース又は移動架台に加え得る最大の負荷。
注記 定格負荷は,必要な場合には,エンドエフェクタ,附属
物,工作物などの慣性効果を含んでいる。
rated load
6.2.3
制限負荷
運転条件が限定されるが,ロボットの機構に損傷若しくは故障
を与えることがないような,メカニカルインタフェース又は移
動架台に加え得る最大の負荷。製造業者が提示するもの。
limiting load
6.2.4
付加質量
定格負荷に加えてロボットが担うことができる負荷。マニピュ
レータのメカニカルインタフェース以外の部分(一般に,腕)
に加えられる。
additional load,
additional mass
6.2.5
最大スラスト負荷
ロボット機構に永久損傷を与えることなくメカニカルインタ
フェース又は移動架台に継続して加え得るスラスト負荷(慣性
項は含まない。)。
maximum thrust,
maximum force
6.2.6
最大モーメント負荷
ロボット機構に永久損傷を与えることなくメカニカルインタ
フェース又は移動架台に継続して加え得るモーメント負荷(慣
性項は含まない。)。
maximum moment,
maximum torque
6.3
速度
Velocity
6.3.1
単軸速度
単一の軸が動作したときの所定の点の速度。
individual joint
velocity,
individual axis
velocity
6.3.2
経路速度
経路に沿った単位時間当たりの位置の変化。
注記 ポーズ(4.5)参照。
path velocity
6.4
加速度
Acceleration
6.4.1
単軸加速度
単一の軸が動作したときの所定の点の加速度。
individual joint
acceleration,
individual axis
acceleration
6.4.2
経路加速度
経路に沿った単位時間当たりの速度の変化。
path acceleration
11
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
6.5
ポーズ精度
同一指令ポーズに同一方向から近づけたときの,指令ポーズと
実現ポーズの平均との差。
pose accuracy,
unidirectional pose
accuracy
6.6
ポーズ繰返し精度,
一方向ポーズ繰返し
精度
同一指令ポーズに同一方向から繰り返し近づけたときの,実現
ポーズのばらつき。
pose repeatability,
unidirectional pose
repeatability
6.7
多方向ポーズ戻り精
度
同一指令ポーズに直交する三方向からそれぞれ複数回近づけ
たときの,各々の実現ポーズの平均の間の最大距離。
multidirectional
pose accuracy
variation
6.8
距離精度
指令距離と実現距離の平均との差。
distance accuracy
6.9
距離繰返し精度
同一方向から同一指令距離で繰り返し動かしたときの,実現距
離のばらつき。
distance repeatability
6.10
ポーズ安定化時間
ロボットが到達信号を発した瞬間から,メカニカルインタフェ
ース又は移動架台の減衰振動若しくは減衰運動が所定の限界
内に収まる瞬間までに経過する時間。
pose stabilization
time
6.11
ポーズ行過ぎ量
ロボットが到達信号を発した後の,接近指令経路と実現ポーズ
との間の最大距離。
pose overshoot
6.12
ポーズ精度のドリフ
ト
所定時間内におけるポーズ精度の変化。
drift of pose accuracy
6.13
ポーズ繰返し精度の
ドリフト
所定時間内におけるポーズ繰返し精度の変化。
drift of pose
repeatability
6.14
経路精度
指令経路と実現経路の平均との差。
path accuracy
6.15
経路繰返し精度
同一指令経路に沿って動かしたときの,複数の実現経路のばら
つき。
path repeatability
6.16
経路速度精度
指令経路に沿って動かしたときの,指令経路速度と実現経路速
度の平均との差。
path velocity
accuracy
6.17
経路速度繰返し精度
指令経路速度で動かしたときの,実現経路速度のばらつき。
path velocity
repeatability
6.18
経路速度変動
指令経路に沿って指令速度で動かしたときの,実現速度の最大
値と最小値との差。
path velocity
fluctuation
6.19
最短移動時間
メカニカルインタフェース又は移動架台が静止状態から出発
し,あらかじめ定められた距離を動き静止状態に達するまでに
経過する最短時間(ポーズ安定化時間を含む)。
minimum posing
time
6.20
静的コンプライアン
ス
メカニカルインタフェースに加えられる単位負荷当たりのメ
カニカルインタフェースの最大変位。
static compliance
6.21
最小変位
ロボットの各軸又は各ジョイントが実現し得る動きの最小の
増分。
resolution
6.22
サイクル
タスクプログラムの1回の実行。
注記 タスクプログラムは,循環的とは限らない。
cycle
6.23
サイクルタイム
サイクルを実行するのに必要な時間。
cycle time
6.24
標準サイクル
ロボットが所定の条件の下で代表的なタスク(標準タスク)を
1回実行するときの一連の動き。
standard cycle
7
センシング及びナビゲーション
番号
用語
定義
対応英語
7.1
環境地図,
環境モデル
環境をその目立つ特徴を基に記述した地図又はモデル。
例 格子地図,幾何地図,トポロジカル地図,意味地図。
environment map,
environment model
7.2
位置同定
移動ロボットが自分のポーズを認識すること,又は環境地図上
での自分のポーズを同定すること。
localization
12
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語
7.3
ランドマーク
環境地図上で同定可能で,移動ロボットの位置同定に用いる人
工物又は自然物。
landmark
7.4
障害物
所期の動きを妨げる静止若しくは移動する物体,地面又は壁,
天井などの形状。
注記 地面の障害物には,段差,穴,不整地などがある。
obstacle
7.5
マッピング,
地図作成,
地図生成
検出可能な幾何学的特徴,ランドマーク,障害物などを用いて
環境を記述する環境地図を作成すること。
mapping,
map building,
map generation
7.6
ナビゲーション
環境地図及び位置同定に基づいて移動方向を決定し制御する
こと。
注記 ナビゲーションには,ポーズからポーズへの移動のため
の,及び全領域掃引のための経路計画がある。
navigation
7.7
移動面
移動ロボットがその上を移動する地表面。
travel surface
7.8
推測航法,
デッドレコニング
既知の初期ポーズから内界計測だけを用いて移動ロボットの
ポーズを求める方法。
dead reckoning
7.9
センサ融合,
センサフュージョン
ロボットの複数のセンサからの情報を総合して,より高度な情
報を得る処理。
sensor fusion
7.10
作業計画,
タスクプラニング
実行しようとする作業を分解し,部分作業及び運動を含む作業
手順を生成する処理。
注記 作業計画には,自律的作業計画と使用者が行う作業計画
とがある。
task planning
7.11
ロボットセンサ
ロボットの制御のために内部及び外部の情報を得るための変
換器。
robot sensor
7.11.1
内界センサ,
内界計測センサ
ロボットの内部の状態を計測するためのロボットセンサ。
例 エンコーダ,ポテンショメータ,回転速度計,又は,加速
度計及びジャイロスコープのような慣性センサ。
proprioceptive
sensor,
internal state sensor
7.11.2
外界センサ,
外界計測センサ
ロボット環境の状態又はロボットと環境との相互作用の状態
を計測するためのロボットセンサ。
例 GPS,視覚センサ,距離センサ,力センサ,触覚センサ,
聴覚センサ。
exteroceptive sensor,
external state sensor
13
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
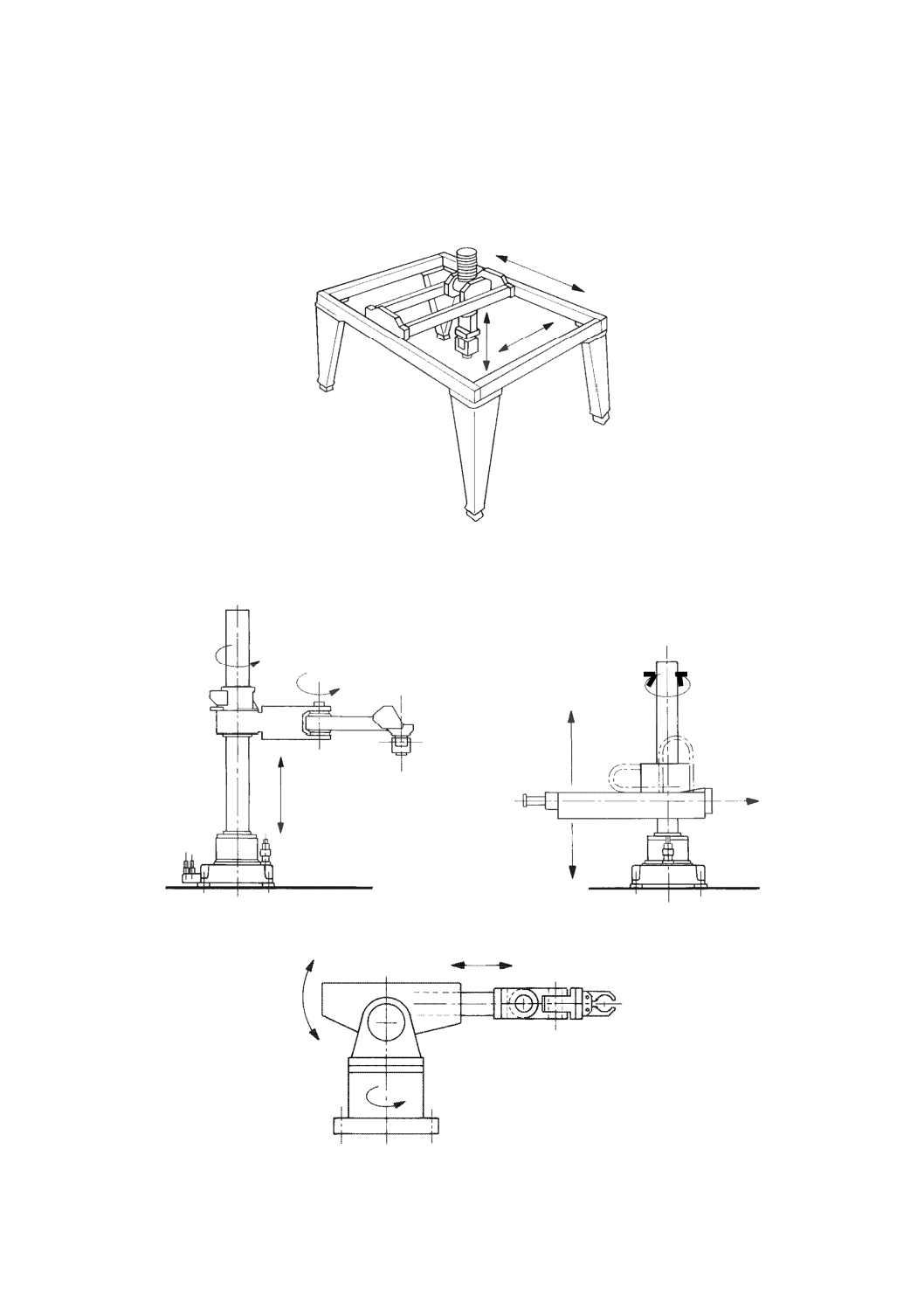
附属書A
(参考)
ロボットの機械構造形式の例
図A.1−直角座標ロボット
図A.2−円筒座標ロボット
図A.3−極座標ロボット
14
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
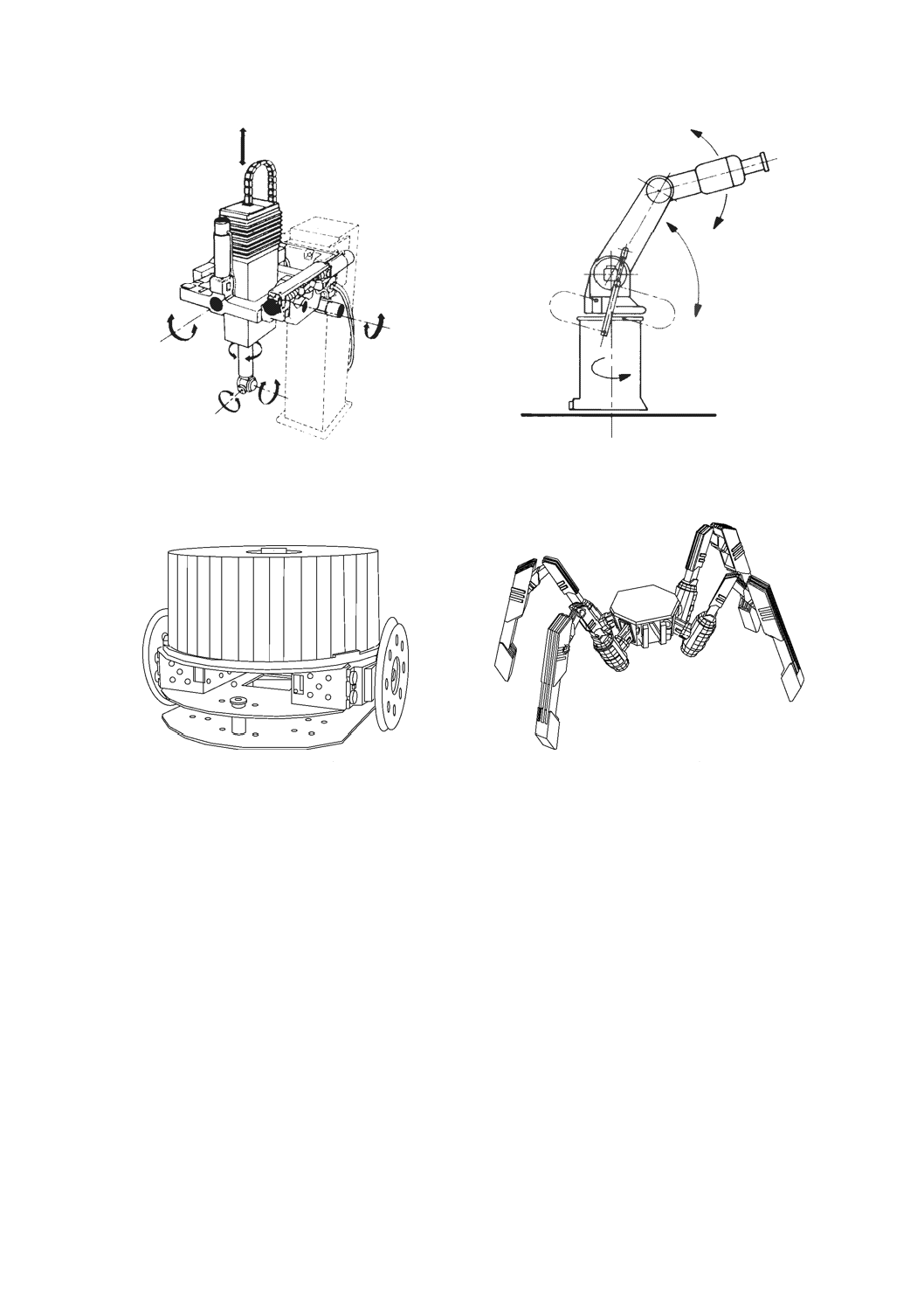
図A.4−振り子ロボット
図A.5−多関節ロボット
図A.6−車輪移動ロボット
図A.7−脚移動ロボット
15
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
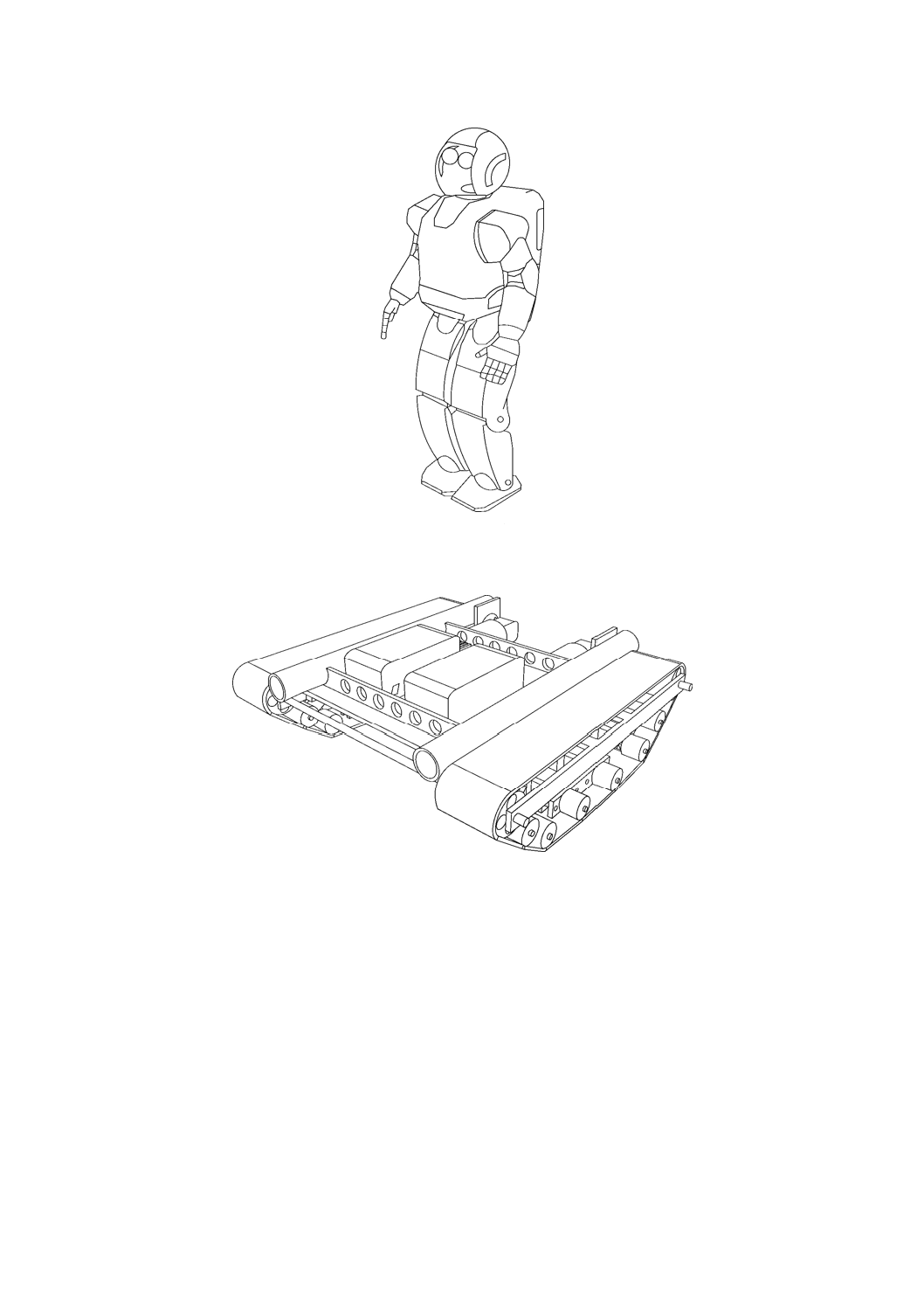
図A.8−二足ロボット
図A.9−クローラロボット
16
B 0134:2015 (ISO 8373:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS Q 9000:2006 品質マネジメントシステム−基本及び用語
[2] JIS B 8431 産業用マニピュレーティングロボット−特性の表し方
[3] JIS B 8432 産業用マニピュレーティングロボット−性能項目及び試験方法
[4] JIS B 8433-1 ロボット及びロボティックデバイス−産業用ロボットのための安全要求事項−第1部:
ロボット
[5] JIS B 8433-2 ロボット及びロボティックデバイス−産業用ロボットのための安全要求事項−第2部:
ロボットシステム及びインテグレーション
[6] JIS B 8436 産業用マニピュレーティングロボット−メカニカルインタフェース−フランジ形
[7] JIS B 8437 産業用マニピュレーティングロボット−座標系及び運動の記号
[8] JIS B 8441 産業用マニピュレーティングロボット−メカニカルインタフェース−シャフト形
[9] JIS B 8442 産業用マニピュレーティングロボット−エンドエフェクタ自動交換装置−用語及び特性
の表し方
[10] JIS B 8443 産業用マニピュレーティングロボット−把握型グリッパによる対象物ハンドリング−用
語及び特性の表し方
[11] ISO/TR 13309,Manipulating industrial robots−Informative guide on test equipment and metrology methods
of operation for robot performance evaluation in accordance with ISO 9283