A 8921-2:2011 (ISO 12117-2:2008)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 2
4 記号及び略語 ··················································································································· 6
5 試験方法及び設備 ············································································································ 11
5.1 一般事項 ····················································································································· 11
5.2 計測装置 ····················································································································· 11
5.3 試験設備 ····················································································································· 11
5.4 ROPSと旋回フレームとの組立品及びベッドプレートへの取付け ··········································· 11
6 試験負荷手順 ·················································································································· 12
6.1 一般事項 ····················································································································· 12
6.2 ROPSの側方負荷試験 ···································································································· 13
6.3 ROPSの前後方向負荷試験 ······························································································ 14
6.4 ROPSの垂直負荷試験 ···································································································· 16
7 材料の温度基準 ··············································································································· 16
8 許容基準························································································································ 17
9 ROPSのラベル表示 ········································································································· 20
9.1 一般 ··························································································································· 20
9.2 ラベルの仕様 ··············································································································· 21
9.3 表示の内容 ·················································································································· 21
10 試験結果報告 ················································································································ 21
11 取扱説明書 ··················································································································· 21
附属書A(規定)JIS A 8921-2に適合するROPSの試験報告書 ····················································· 22
附属書B(参考)設計変更,実物試験及び改造 ·········································································· 24
附属書C(参考)理論的根拠−ROPS性能要求事項 ···································································· 25
A 8921-2:2011 (ISO 12117-2:2008)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本建設機械化協会(JCMA)及び
財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,
日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS A 8921の規格群には,次に示す部編成がある。
JIS A 8921 ミニショベル横転時保護構造(TOPS)−試験方法及び性能要求項目
JIS A 8921-2 ショベル系掘削機保護構造の台上試験及び性能要求事項−第2部:6トンを超える油圧
ショベルの転倒時保護構造(ROPS)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
A 8921-2:2011
(ISO 12117-2:2008)
土工機械−ショベル系掘削機保護構造の台上試験
及び性能要求事項−第2部:6トンを超える
油圧ショベルの転倒時保護構造(ROPS)
Earth-moving machinery-Laboratory tests and performance requirements
for protective structures of excavators-Part 2: Roll-over protective
structures (ROPS) for hydraulic excavators of over 6 t
序文
この規格は,2008年に第1版として発行されたISO 12117-2を基に,技術的内容を変更することなく作
成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,油圧ショベルの転倒時保護構造(以下,ROPSという。)の静的負荷による耐負荷特性を評
価する一連の再現性のある試験方法,及び代表的な供試品に対する性能要求事項について規定する。
この規格は,運転質量が6 tを超え50 t未満のJIS A 8403-1に規定する油圧ショベルのROPSに適用する。
ROPSは,機械が傾斜角30°以下の堅い粘土地盤の斜面上を地面との接触を失うことなく,旋回フレーム
の前後方向中心軸を中心に360°回転するという条件の下で,シートベルトを着用した運転員が押しつぶ
されないよう最小限の保護空間を確保する。ROPSは転倒のリスクが存在する場合に適用しなければなら
ない。
この規格は,荷取扱い若しくは解体用,又は電磁石,クラムシェル,グラブなどのアタッチメント付き
で使用する油圧ショベル用若しくはその派生機械用のROPSにも適用する。
この規格は,昇降式のキャブライザを備えた油圧ショベルには適用しない。
注記1 この規格は,許容基準を導き出すために用いた実験及び統計データの制約によって,運転質
量50 t未満の油圧ショベルへの適用を意図している。このことは,この規格に記載する手順
を,より大重量又は軽量の油圧ショベルに適用する可能性を排除するものではないが,鉱山
用に特別に設計された油圧ショベルの場合には,要求値が非現実的な設計をもたらすことが
あり得るので除外する。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 12117-2:2008,Earth-moving machinery−Laboratory tests and performance requirements for
protective structures of excavators−Part 2: Roll-over protective structures (ROPS) for
excavators of over 6 t(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
2
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8315 土工機械−運転員の身体寸法及び運転員周囲の最小空間
JIS A 8318 土工機械−座席基準点(SIP)
注記 対応国際規格:ISO 5353,Earth-moving machinery, and tractors and machinery for agriculture and
forestry−Seat index point(IDT)
JIS A 8322 土工機械−寸法,性能及び容量の単位並びに測定の正確さ
注記 対応国際規格:ISO 9248,Earth-moving machinery−Units for dimensions, performance and
capacities, and their measurement accuracies(IDT)
JIS A 8403-1 土工機械−油圧ショベル−第1部:用語及び仕様項目
JIS A 8910 土工機械−転倒時保護構造−試験及び性能要求事項
注記 対応国際規格:ISO 3164,Earth-moving machinery−Laboratory evaluations of protective structures
−Specifications for deflection-limiting volume(MOD)
JIS B 1051 炭素鋼及び合金鋼製締結用部品の機械的性質−第1部:ボルト,ねじ及び植込みボルト
JIS B 1052-2 締結用部品の機械的性質−第2部:保証荷重値規定ナット−並目ねじ
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
アタッチメント(attachment)
規定した用途のために,本体又はエクイップメントに取り付ける構成部品の組立品(JIS A 8320参照)。
3.2
ベッドプレート(bed plate)
試験目的のために,機械のフレームを取り付ける試験設備の十分に堅固な部分。
3.3
境界面,BP(boundary plane)
たわみ限界領域(DLV)の背面,側面,及びひざ部の垂直投影として定義する面。
注記 境界面は,負荷領域を決定するために使用する。
3.4
境界仮想地面,BSGP(boundary simulated ground plane)
機械が転倒したときの地面による衝撃に対して運転員へ更なる保護を与える可能性のある機械の剛性の
高い箇所を用いて決定する平面。
注記 剛性の高い箇所の確認方法については,6.1.5参照。
3.5
キャブライザ(cab riser)
(機械の)標準仕様に対して,JIS A 8318に規定する座席基準点(SIP)の高さを250 mmを超えて高め
る固定式のスペーサ。
3
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.6
たわみ限界領域,DLV(deflection-limiting volume)
通常の服装でヘルメットを装着した着座姿勢のJIS A 8315に定義する大柄運転員の近似的箱形形状(JIS
A 8910の附属書1参照)。
3.7
ROPSのたわみ量(deflection of ROPS, deflection)
着力点において計測した,ROPS,取付装置及びフレーム部の動きで,試験設備の動きによる影響を除い
た量。
3.8
エクイップメント(equipment)
アタッチメントがその本来の設計動作ができるように,本体に取り付けた構成部品のセット。
3.9
基準地表面,GRP(ground reference plane)
機械が止まる堅固な平面を仮想した面。
3.10
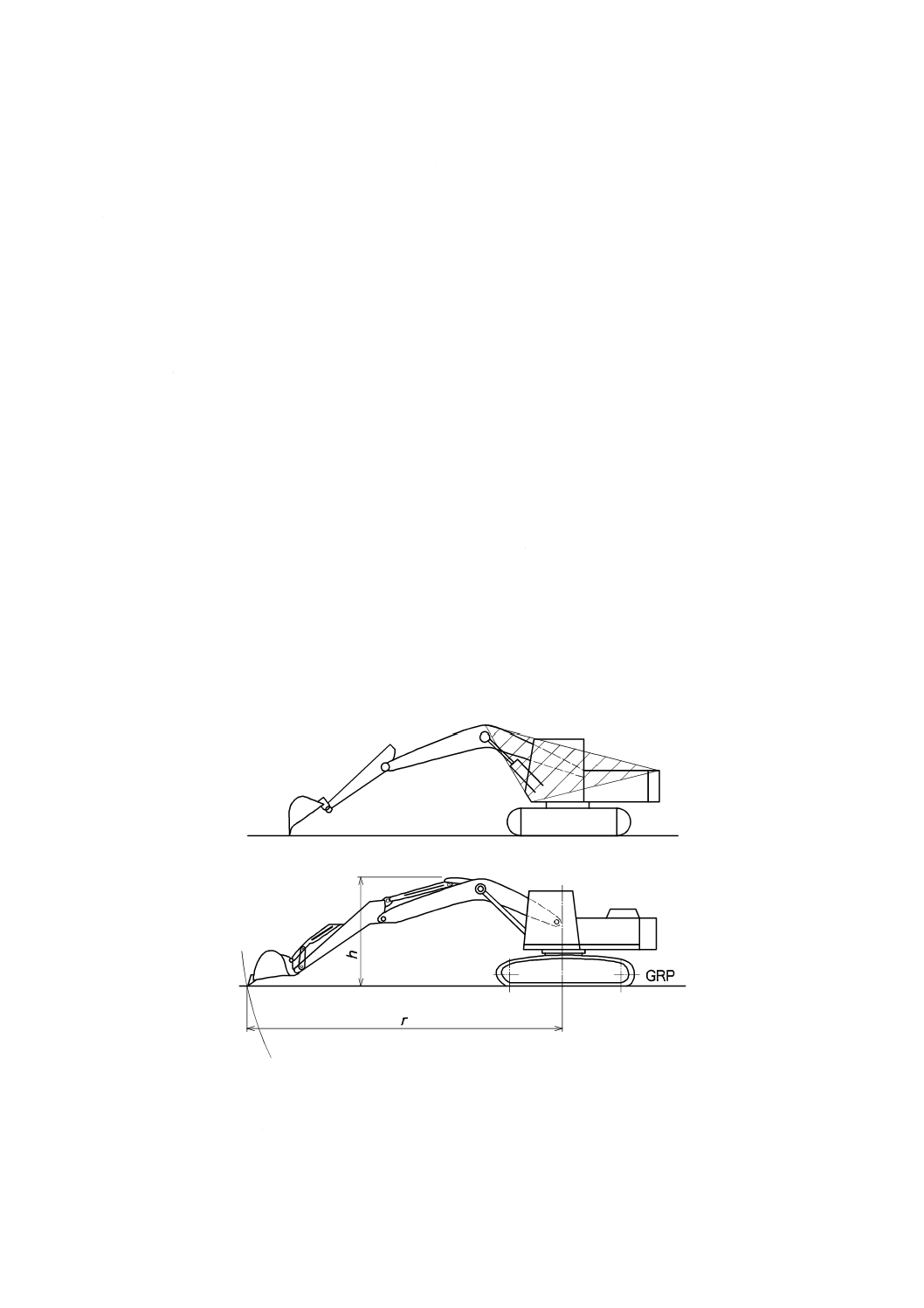
側方境界仮想地面,LBSGP(lateral boundary simulated ground plane)
機械の左側の剛性の高い箇所3点(例えば,ブーム左側面の最高位置,キャブを支持するフレームの左
側前端及びカウンタウェイト左側面など)で決まる平面で,基準地表面(GRP)上で作業装置(エクイッ
プメント及びアタッチメント)を製造業者の規定する最大掘削半径位置(床面最大掘削半径位置)にした
機械が,(転倒後)左側面を下にしてその上に静止すると仮定した平面(図1参照)。
注記 LBSGPは,例えばカウンタウェイト左側端,作業装置を床面最大掘削半径位置としたときのブ
ーム最高位置の左側及びキャブを支持するフレームの左側前端面の剛性の高い箇所3点を含む。
a) LBSGP
b) 最小ブーム高さ
h
最小ブーム高さ
r
床面最大掘削半径
GRP 基準地表面
図1−側方境界仮想地面(LBSGP)
4
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.11
側方仮想地面,LSGP(lateral simulated ground plane)
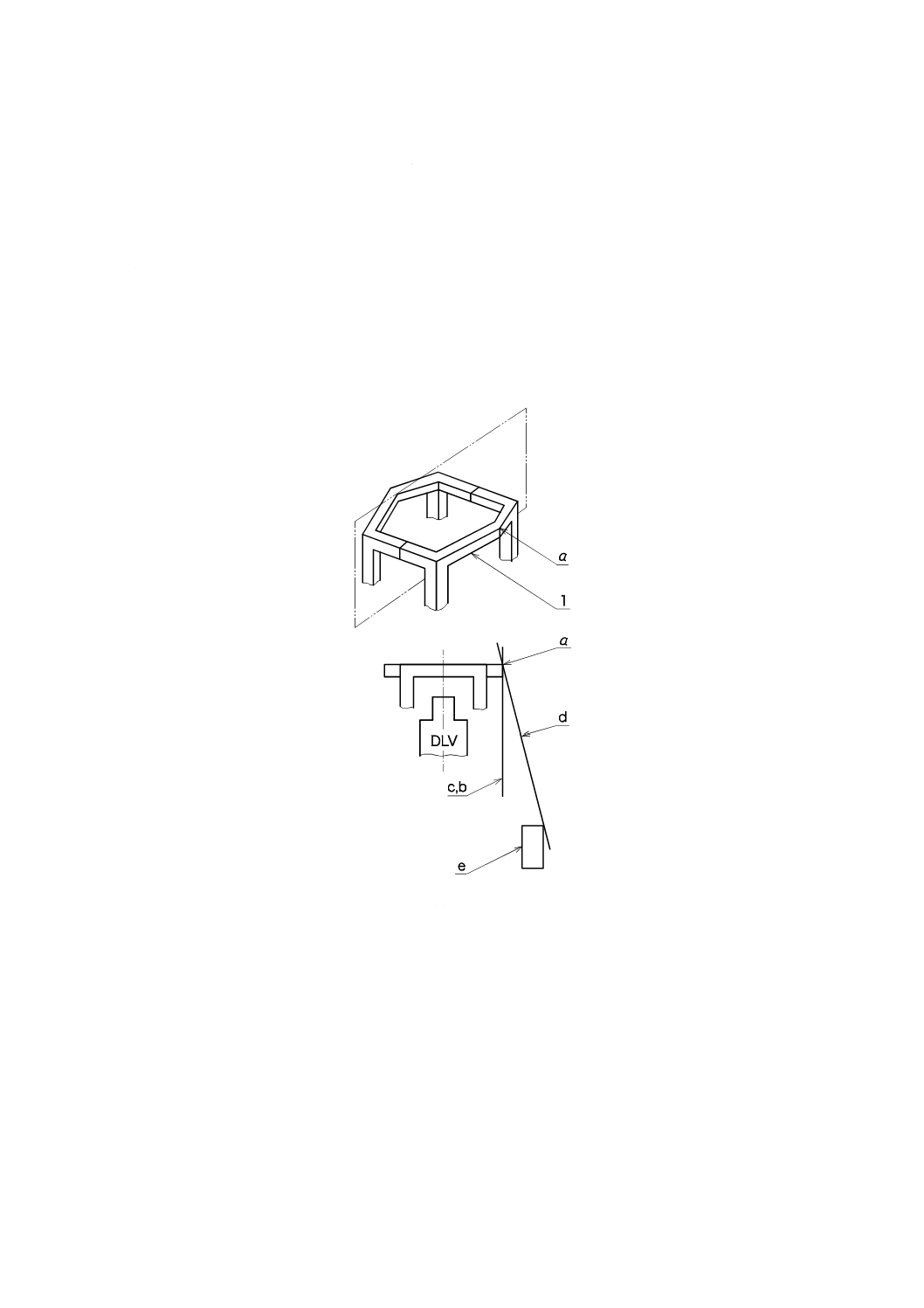
機械が(回転して)その面で止まると設定した面(図2参照)。
注記1 この平面は,機械の前後方向中心線に平行な垂直面を回転させて,ROPSの横負荷を受ける
頂部構造部材の最外端点と機械の2番目に低い点とを通る新規の平面として創成される。
注記2 図2にb及びeとして示す堅固な2点は,機械質量の半分を支えることができる。
注記3 LSGPは,負荷前のROPSに対して設定し,負荷によって当初の垂直面に対する傾斜を維持
しつつROPS部材とともに動く。
注記4 LSGPは,機械が(転倒状態で)2か所の堅固な点で止まる条件で適用する。第3の堅固な点
(の存在)が考えられる場合は,LBSGPを適用することができる。
1
横負荷が負荷されるROPSの頂部部材
a
部材を端から見たときの最外端点
b
部材を端から見たときの最外端点を通る垂線
c
上記の垂線bを含み,機械の前後方向中心線に平行な垂直面
d
側方仮想地面
e
LSGP設定の際に参照される機械の剛性の高い部分
図2−側方仮想地面(LSGP)
3.12
着力点,LAP(load application point)
ROPSに対し試験荷重Fを負荷する点。
5
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.13
負荷分散器具,LDD(load distribution device)
着力点におけるROPS部材の局部的な貫入を防止するために用いる器具。
3.14
1柱式又は2柱式ROPS(one or two post ROPS)
片持ちはり式の耐負荷構造部材をもつように成形又は構成した1柱式又は2柱式ROPS。
3.15
運転質量,OM(operating mass)
運転員(75 kg),燃料タンク,潤滑系統,油圧系統及び冷却系統の油,水などを規定量とし,散水タン
クがある場合はそれを半量とした本体に,製造業者の指定する最も標準的な仕様の空荷の作業装置を取り
付けたときの質量。
注記1 非搭乗式の機械では,運転員の質量は含まない。
注記2 出荷時のバラスト質量は,製造業者の規定によっては含めることができる(JIS A 8320参照)。
注記3 使用中の機械に付着した土,岩石,枝,破片などは,機械の質量から除外する。掘削,運搬
又は持ち上げた物質は,試験条件を決定する際には機械の質量には含めない。
3.16
運転員保護ガード,OPG(operator protective guards)
(落下物に対する保護のため)油圧ショベルの運転席に取り付けるトップガード及びフロントガードを
組み合わせた装置(JIS A 8922参照)。
3.17
代表的供試品(representative specimen)
材質及び製造品質が製造業者の量産仕様の範囲内にある,試験の目的で使用するROPS及びその取付金
具並びに機械フレーム(完成品又は部品)。
注記 この規格に基づく仕様で製造した全てのROPSが所要の性能水準を満足するか上回ることを意
図している。
3.18
ロールバーROPS(rollbar ROPS)
FOPS又は載荷用の片持ちはり式耐負荷構造部材をもたない,1柱式又は2柱式のROPS(JIS A 8910参
照)。
3.19
転倒時保護構造,ROPS(roll-over protective structure)
機械が,転倒したときに,シートベルトシステムで支えた運転員に適切な保護を与えることを主要な目
的とした主として金属製の構造部材。
注記 この構造部材には,これを旋回フレームに取り付けるためのサブフレーム,ブラケット,マウ
ンティング,ソケット,ボルト,ピン,サスペンション又は可とう(撓)性のショックアブソ
ーバなどを含むが,旋回フレームと一体構造の取付座は含まない。
3.20
ROPS構造部材(ROPS structural member)
ROPSの負荷に耐え,又は負荷エネルギーを吸収するように設計した構造部材。
例 サブフレーム,ブラケット,マウント,ソケット,ボルト,ピン,サスペンション,可とう(撓)
6
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
性のショックアブソーバ
3.21
シートベルトシステム(seat belt system)
シートベルト及びシートベルト取付部(JIS A 8911参照)。
3.22
ソケット,S(socket)
負荷分散器具(LDD)の局部的な負荷を軽減するための部材。
3.23
剛性の高い箇所(stiff point)
固定された構造部材上の部位で,転倒時に予測される変形をもたらす負荷を支える適切な強度をもつ箇
所。
注記 剛性の高い箇所は,次の方法で設定する。
a) 各箇所に対して標準の機械質量と同等の荷重をBSGPに垂直に負荷する。
b) 各剛性の高い箇所でのたわみを測定し,その状態でBSGPを再設定する(各箇所で測定さ
れたたわみは,部材の地面への侵入と部材そのものの変形を加えたものとして計算でき
る。)。
c) 上記の方法で設定したBSGPを使用して実際の試験を行う。
3.24
旋回フレーム(revolving frame)
機械の主要構造部材で,通常の運転状態では,その上にROPSを直接取り付けることができるフレーム。
注記 この規格では,通常取り外し可能な構成部品は機械フレームから除いてもよい。このフレーム
は,旋回ベアリングの上部に取り付けることができる機械フレームを再現した構成だけが必要
である。
3.25
天頂境界仮想地面,VBSGP(vertical boundary simulated ground plane)
上下逆さまに転倒した姿勢で静止した機械のROPS上部構造部材によって設定した平面。
注記1 この平面は,機械上部の剛性の高い箇所によっても設定できる。例えば,作業装置が機械の
製造業者が規定する床面最大掘削半径の状態で転倒し,上下逆さまの姿勢で静止したとき,
ブームの頂部及びカウンタウェイト頂部によって設定できる。
注記2 VBSGPは,例えば作業装置が床面最大掘削半径の状態のブームの頂部及びカウンタウェイト
頂部のりょう(稜)線のような,剛性の高い3か所を含む。
3.26
DLVの垂直投影(vertical projection of the DLV)
DLVの脚部を除く4隅の垂直投影で形成する範囲。
4
記号及び略語
この規格で用いる記号及び略語は,次による。
U
保護構造物によって吸収されるエネルギーで,機械の質量に関係し,Jで表示する。
F
ROPSにかけられる力で,Nで表示する。
M 製造業者が指定する最大運転質量で,作業に必要なアタッチメント,規定量の燃料,潤滑油,作動油
7
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
など,携行工具及びROPSを含み,kgで表示する。
L
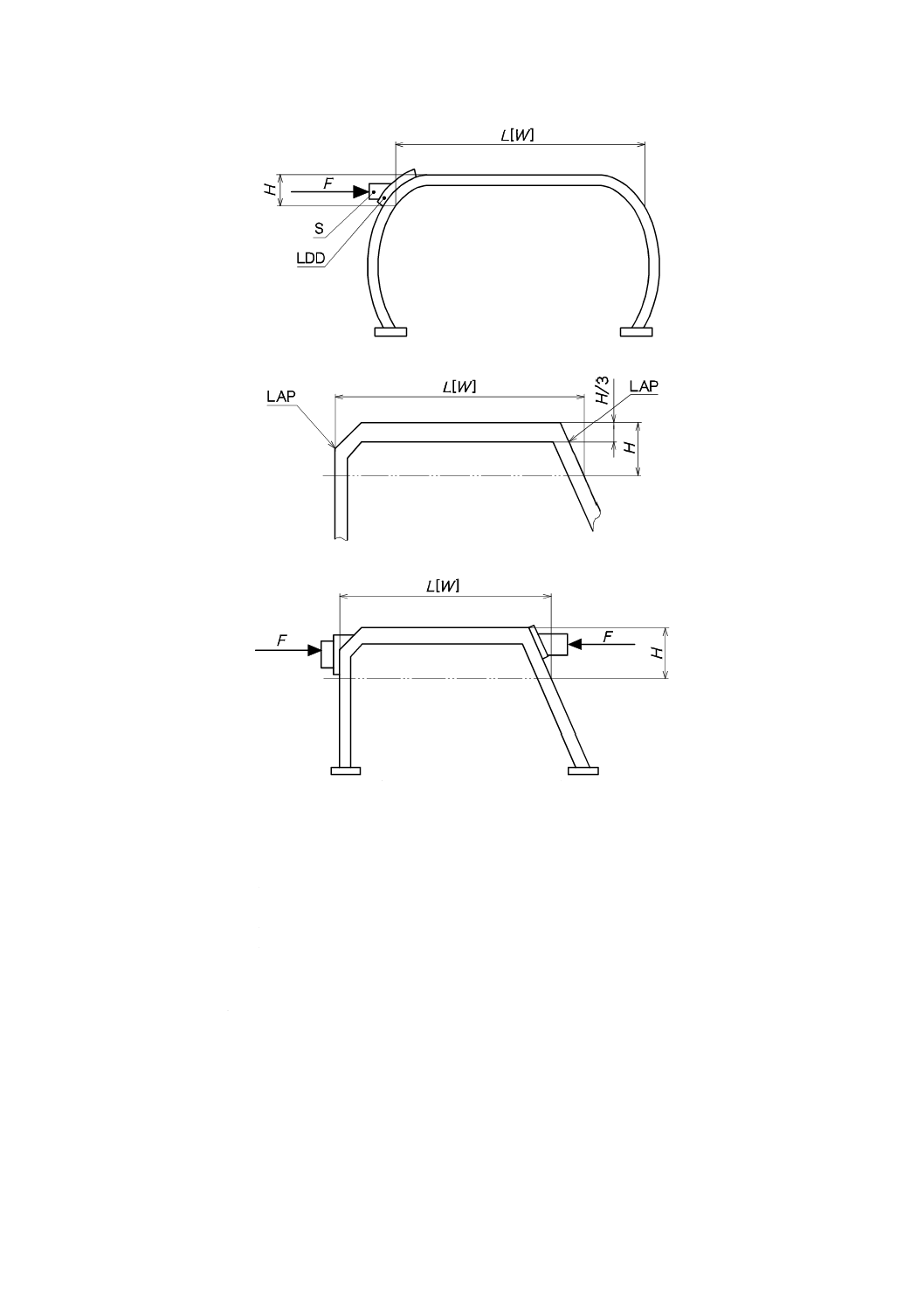
次のように定義されるROPSの長さで,mmで表示する。
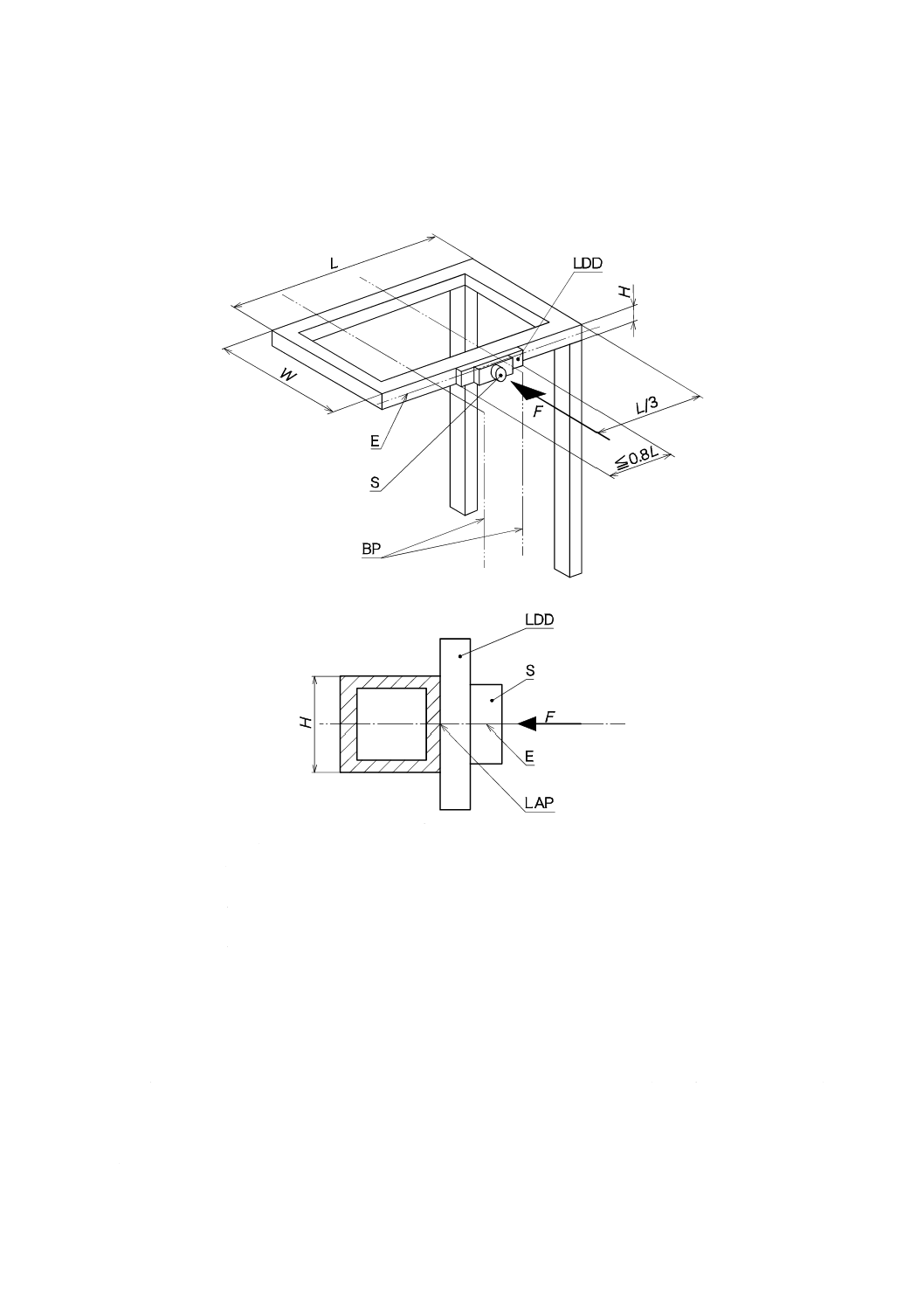
a) 1柱式又は2柱式ROPSにあっては,LはROPSの頂部において,ROPS支柱の端面から片持ちはり
式耐負荷構造部材の他端までの距離とする(図3参照)。
E
ROPS上部構造部材の上下方向中央
F
負荷荷重
H
ROPS上部構造部材の高さ
L
ROPSの長さ
W
ROPSの幅
LDD 負荷分散器具
LAP 着力点
BP
DLVの境界面
S
ソケット
負荷分散器具(LDD)は,寸法Hの範囲を超えて延長してもよい。
図3−2柱式ROPSの側方着力点
b) 多柱式長方形のROPSについては,長さLは(ROPSの頂部において)前後の支柱の外端面間の前
後方向の最大距離とする(図4参照)。
注記 ROPSの主要構造部材がDLVの垂直投影を完全に覆うことは,必ずしも必要としない。
c) カーブした形状の構造部材をもつROPSでは,Lはカーブ部分の中点での柱とはりとの接線の交差
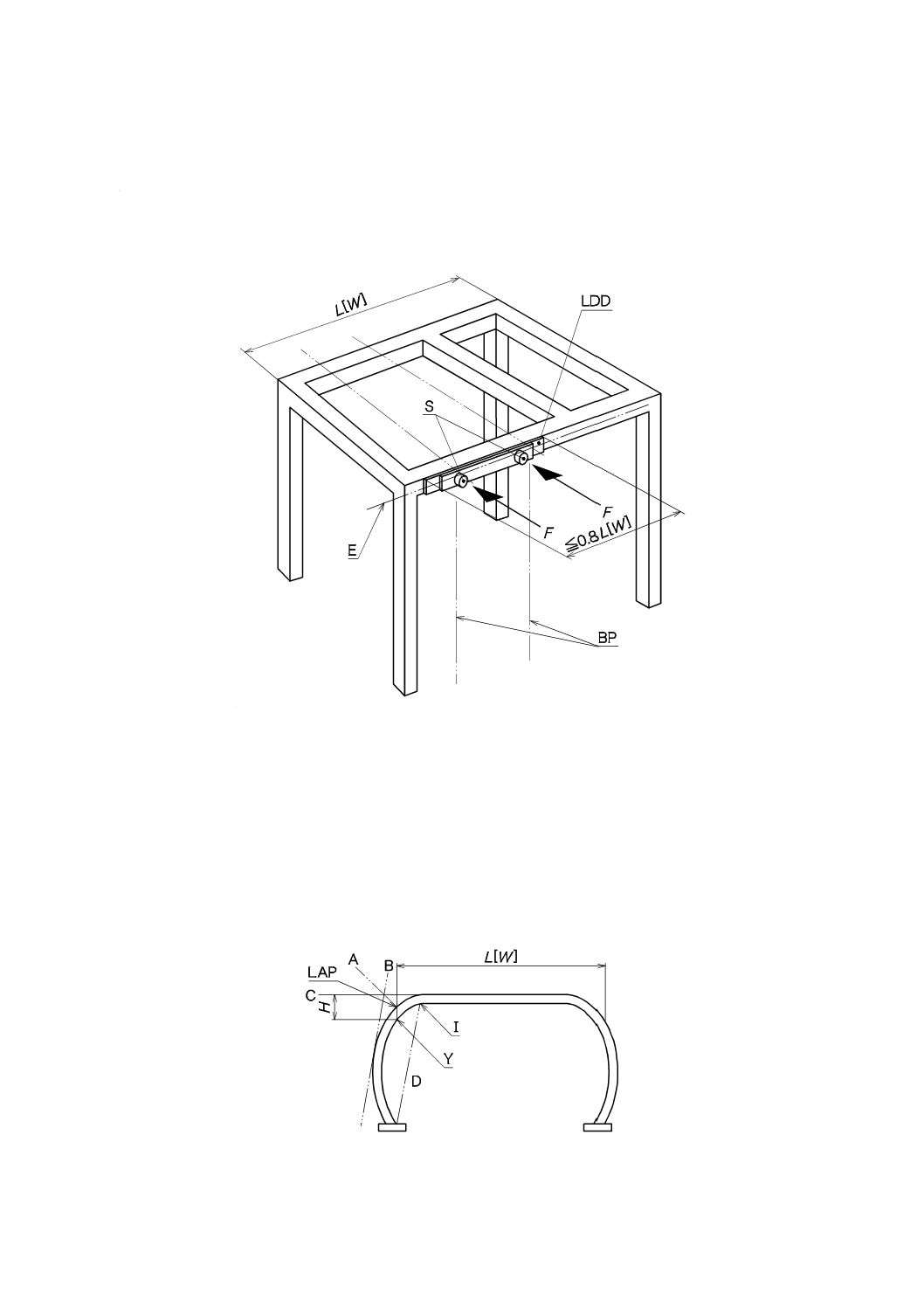
8
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
部で設定する。
d) ロールバー式のROPSでは,Lは適用しない。
e) 折れ曲がり形状の構造部材のROPSでは,Lは図5 c)に示すように定める。すなわち,上部構造部
材の高さの3倍をHとし,その上部構造部材の頂点を通る平面をHだけ下げた平面を定義し,その
平面と前及び後ろの部材との交差部間(端部間)の距離をLとする。
BP
DLVの境界面
E
ROPS上部構造部材の上下方向中央
F
負荷荷重
L[W] ROPSの長さ又は幅
LDD 負荷分散器具
S
ソケット
注記 LAP及びLDDの詳細については,図3の例を参照。この図4では,所要の負荷を同時にかける
ために,2か所以上のソケットを使用する例として,2か所のソケットを図示している。ROPS
が負荷時に回転するのを制限しないよう,両者に同レベルの負荷をかけなければならない。
図4−4柱式ROPSの側方着力点
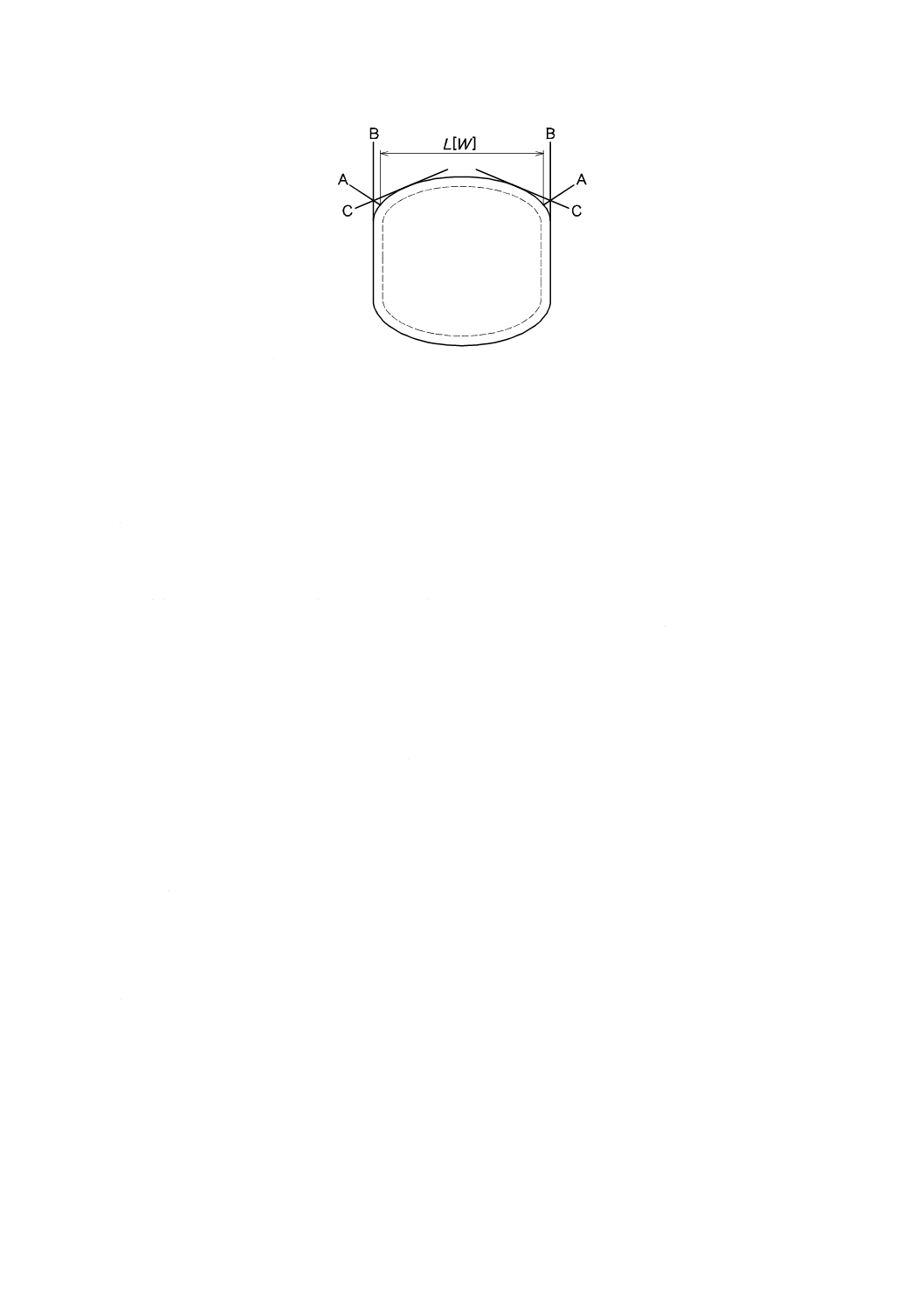
a) カーブ形状の構造部材(カーブ形状の柱)の場合のL又はW及びH寸法の例
図5−カーブ形状又は折れ曲がり形状の構造部材の例
9
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) カーブ形状の構造部材(カーブ形状の柱)の場合の着力点の例
c) 折れ曲がり形状の構造部材の場合のH及びL又はW,並びに寸法取りの例
d) 折れ曲がり形状の構造部材の場合の着力点の例
A
二つの接線B及びCがなす角の二等分線
B
Dに平行でカーブしたROPS構造部材の外側の面を通る接線
C
ROPS上部構造部材の頂部の投影
D
カーブ形状のROPS構造部材の隣接する部材との端部を結ぶ交線
F
負荷荷重
I
カーブ形状の部材と平面との交差部
H
負荷領域の高さ(深さ)
LDD 負荷分散器具
L[W] LAPを決定するためのROPSの長さ又は幅
S
ソケット
LAP 着力点
Y
LAPから下ろした垂線と柱の内側の面との交差部
注記1 AとBとのなす角は,AとCとのなす角と等しい。
注記2 LAP及びLDDの詳細については,図3の例を参照。
図5−カーブ形状又は折れ曲がり形状の構造部材の例(続き)
10
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A 二つの接線B及びCがなす角の二等分線
B ROPS上部構造部材の(左側及び右側)側面の投影
C ROPS側面(左側を図示)の弧の部分の中点を通る接線
L
負荷位置決定のためのROPSの長さ
図6−カーブ形状の構造部材の別の例(平面図)
W 次に示すROPSの幅で,mmで表す。
a) ロールバー式ROPSでは,構造部材の外端面部の最大幅とする。
b) 片持ちはり式の1柱式又は2柱式ROPSにあっては,幅WはDLVの幅の垂直投影を覆っている耐
負荷構造部材(図1,図4及び図5参照)の部分をいい,ROPSの頂部において片持ちはり耐負荷構
造部材の最外側から他の最外側までの距離とする。
c) 他の全てのROPSについては,幅WはROPSの頂部において左右のROPS支柱の外端面部の最大幅
とする(図5参照)。
d) 折れ曲がった構造部材のROPSでは,幅WはHでの構造部材の最外側の垂直投影とする[図5 c)
参照)]。
e) カーブ形状の構造部材のROPSでは,ROPSのカーブした部材が隣接部材と交差する点を結んだ面
を平面Dとし,そのDに平行でカーブした部材の外側面に接する面を平面Bとし,ROPSの頂部構
造部材の上表面の投影を平面Cとし,平面Bと平面Cを二等分する平面Aと,柱の外側面の交差
点をXとしたときに,Wは,その二点間の距離として定義する[図5 a)参照]。
Δ
ROPSのたわみで,mmで表す。
H
次に示す負荷領域の高さで,mmで表示する。
a) 直線部材では,Hは図3に示す部材の頂部から底部までの距離。
b) カーブ形状の部材では,Hは,図5 a)に示すように部材の頂部から長さLの端から下ろした垂直面
がカーブ形状の部材の内面と交差する部位までの高さ。
c) 折れ曲がった形状の部材では,Hは,図5 c)に示すように頂部部材の桁の高さの3倍。
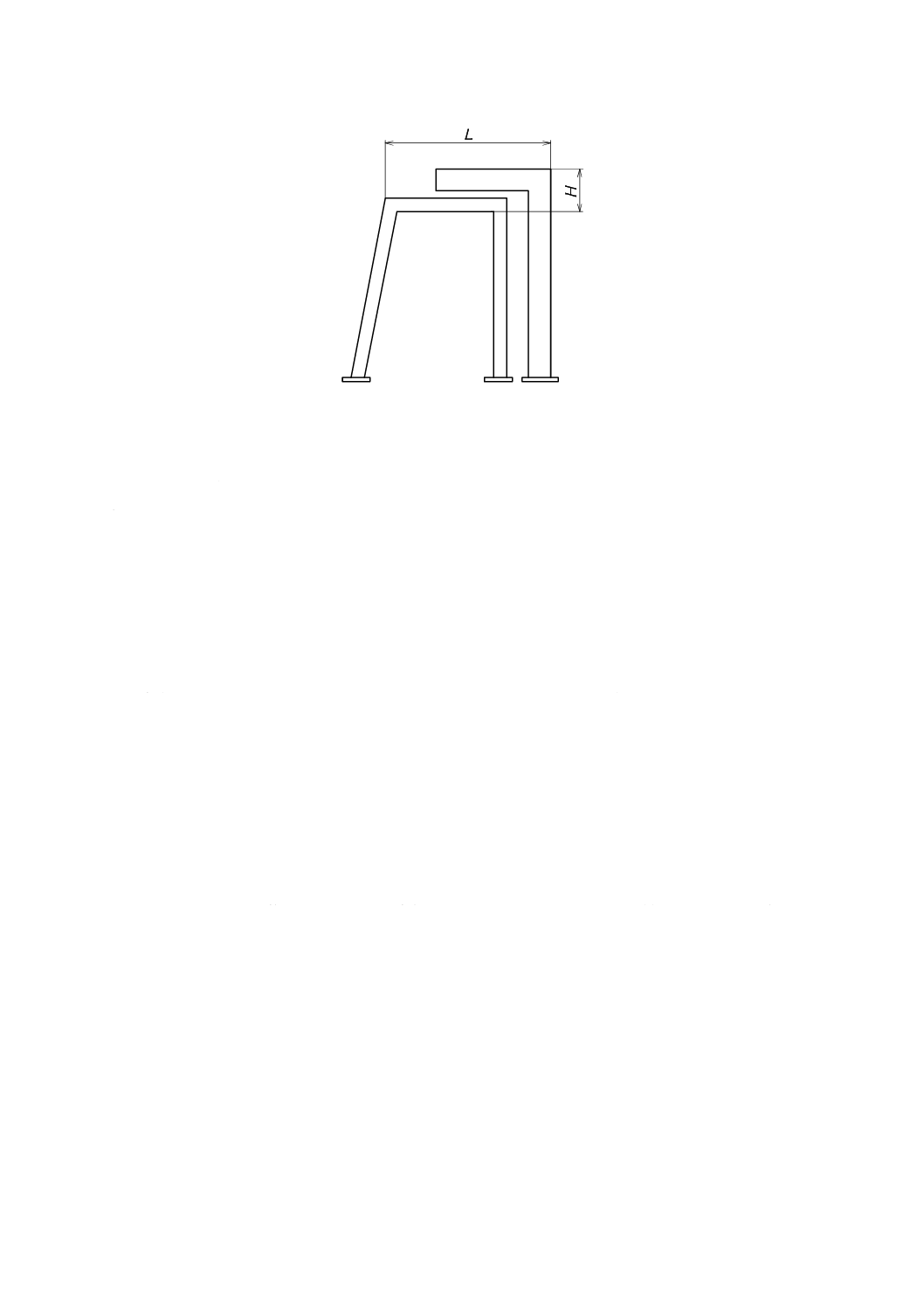
d) 構造上分離した部材で構成されるROPSでは,Hは,長さL又はWの範囲内で,下側の構造物の頂
部部材の最下部から,上側の構造物の最高位置までの高さである(図7参照)。各構造部材は箇条7
の材料要求を満足しなければならない。
11
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 HはROPSの頂部構造部材の全高で,負荷分散器具LDDの高さを決めるときに参照する。
図7−構造部材が分離したROPSの負荷分布領域の高さ
5
試験方法及び設備
5.1
一般事項
(ROPSは,)側方荷重及び垂直荷重に耐え,かつ,側方エネルギー及び前後方向エネルギーも吸収する
ことが要求される。側方,前後方向及び垂直方向の負荷のもとでROPSのたわみ量には制限が設けられて
いる。荷重要求及びエネルギー要求に加えて,これらの負荷の下でのたわみ制限は,ROPSが転倒時の衝
撃によって著しく変形しないことを保証することを意図している。
この評価手順は,必ずしも実際の転倒による構造物の変形を再現するものではない。しかし,特定の要
求事項は作業装置及び機械フレームを加味したROPSの適合性に基づく解析的な考察だけでなく,多様な
実際の転倒事故において意図した機能を発揮したROPSに関する検討から導き出されたものである。した
がって,少なくとも作業装置が製造業者の規定した5.4.4に規定する状態にある機械が最大傾斜30°の堅
い粘土表面上を,地面との接触を失うことなく,旋回フレームの前後方向軸の回りに360°回転する条件
の下で,シートベルトを付けた運転員が押しつぶされるのを防ぐことが期待される。
5.2
計測装置
質量,力及びたわみ量の計測システムは,JIS A 8322に規定する正確さをもつものとする。ただし,力
及びたわみ量の測定精度は,最大値の±5 %とする。
5.3
試験設備
試験設備は,ROPSと旋回フレームとを結合した供試品及び作業装置を床面最大掘削半径の状態として
ベッドプレートに固定し,表2又は表3に示す数式によって決まる又は推奨する側方負荷,前後方向負荷
及び垂直負荷をかけるのに適したものとする。
5.4
ROPSと旋回フレームとの組立品及びベッドプレートへの取付け
5.4.1
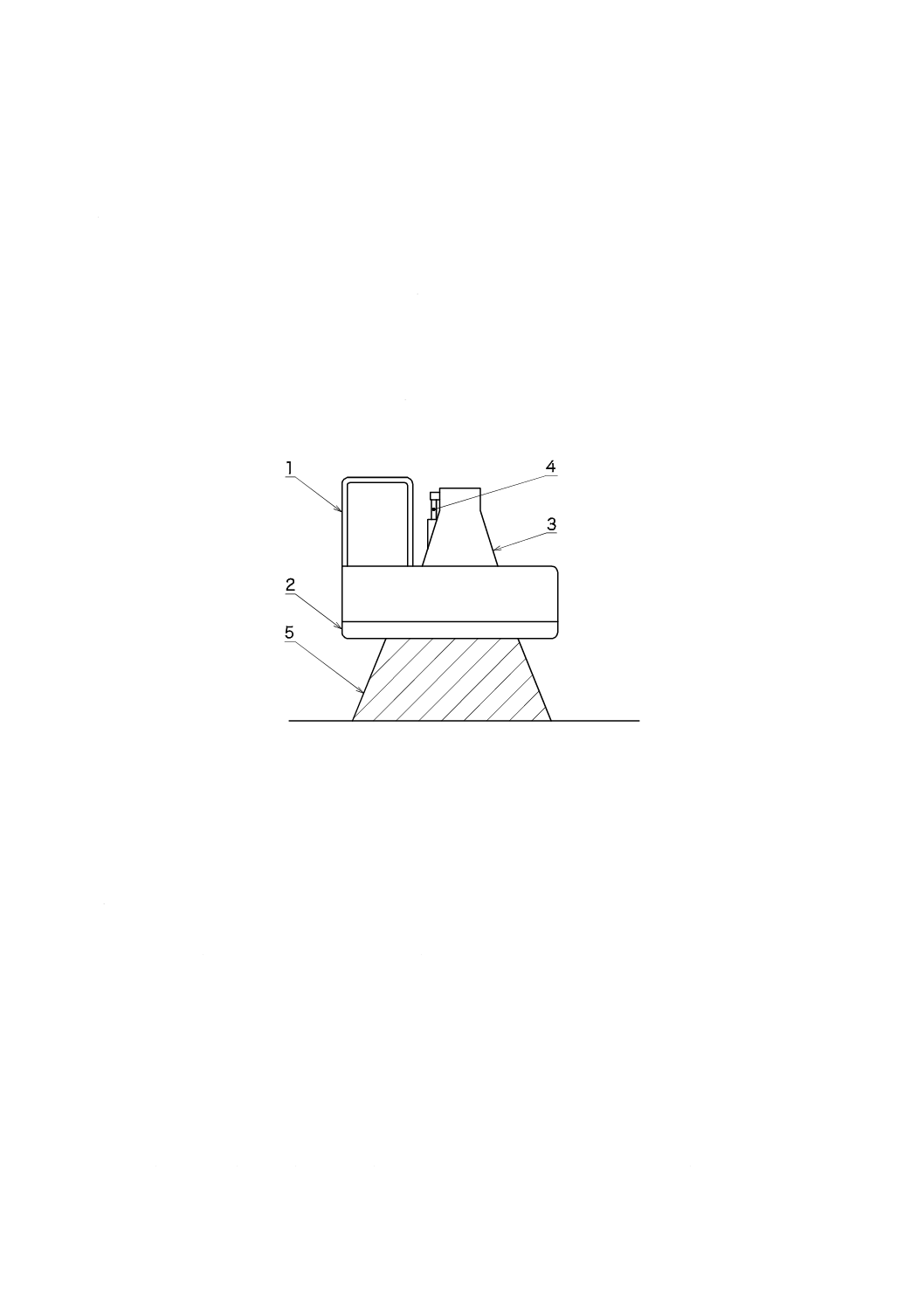
ROPSは,実機と同様に旋回フレームに取り付けなければならない(図8参照)。この評価には旋
回フレームの完成品は必要としない。しかし,旋回フレームとこれに取り付けられたROPSの供試品は,
実機の構造様式を代表するものでなければならない。窓,パネル,扉,その他の通常取り外しできる全て
の非構造部品は,ROPSの評価結果に影響を与えないよう取り除いておく。ROPS以外の要素(例えば,懸
架装置,ベアリング)でROPS構造の性能に構造上貢献するようなものは,それらを装着するか,又は模
擬してもよい。
12
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.4.2
ROPSと旋回フレームとを結合した供試品は,試験中におけるベッドプレートにつなぐ部材の変形
が経験的に最小に止まるように,ベッドプレートに固定しなければならない。また,ROPSと旋回フレー
ムとを結合した供試品は,最初の取付けによる以外は,ベッドプレートからいかなる支持もしてはならな
い。
5.4.3
機械と地上間の全ての緩衝装置は,供試品の荷重−たわみ特性に影響しないよう,外部から確実に
固定して試験を行わなくてはならない。ただし,ROPSを旋回フレームに取り付け,かつ負荷の伝達路と
して働く緩衝部品はそのままとし,試験開始時には機能しているようにする。
5.4.4
作業装置は,シリンダのようなアクチュエータを含め,機械の製造業者が指定する床面最大掘削半
径の位置でブームが最も低い状態とする。
作業装置又は他の機器(例えば,ブーム及びアームシリンダ)が,負荷時にたわんだROPSと干渉し得
る場合は,それらがROPS構造の変形に及ぼす影響を判定するため取り付けておくか模擬する。
作業装置は現物でもよく,又は現物と寸法,剛性及び姿勢が同等のものでもよい。
1
ROPS
2
旋回フレーム
3
ブーム
4
ブームシリンダ
5
ベッドプレート
図8−旋回フレームの取付け
6
試験負荷手順
6.1
一般事項
6.1.1
試験の負荷順序は,最初に側方,次に前後方向,三番目に垂直方向とする。全ての試験は同一の代
表的供試品を使用して実施する(エネルギー及び荷重の要求値の決定に使用する数式は,表2及び表3を
参照)。何らかの理由で負荷を一旦停止し,再度負荷する場合は,除荷すると最初の負荷時の最大たわみか
ら少し戻ることがあるが,そこから再度負荷して最初の負荷時の最大たわみに達するときまでのエネルギ
ーは無視し,その後に負荷されたエネルギーの追加分だけを最初の負荷時のエネルギーに加えた和で評価
する。
6.1.2
負荷試験に先立って,全ての着力点及び面,並びに前後方向中心線を確認し,構造物上にマークす
る。
6.1.3
負荷試験の途中又は負荷試験と負荷試験との間に,部材の曲がりを直したり,修理してはならない。
13
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.1.4
局部的陥没(又は変形)を防ぐため負荷分散器具を使用してもよいが,ROPSの垂直軸回りの回転
を拘束してはならない。
6.1.5
6.2及び/又は6.4に規定する負荷は,表2及び表3に規定するエネルギー又は力のレベルが達成
される前に,LBSGP又はVBSGPに到達した場合は,打ち切ってもよい。試験の際にこの条件を使用する
ときは,機械の剛性の高い箇所をあらかじめ設定しておかなければならない。剛性の高い箇所のたわみは,
次によって確認する。
a) 各箇所においてLBSGP及び/又はVBSGPに機械の標準的な質量と同等な荷重を垂直に負荷する
(ROPSのはり及び柱の地面へのめりこみだけでなく,剛性の高い箇所のたわみも考慮する。)。
b) 各剛性の高い箇所でのたわみを測定し,たわんだときのLBSGP及び/又はVBSGPを設定する。
c) 上記の方法で設定したLBSGP及び/又はVBSGPを使って全ての実地の試験を行う。
注記 6.2及び/又は6.4でLBSGP及び/又はVBSGPを適用するか否かは製造業者の選択であり,
適用しない場合は上記a)〜c)に規定する確認は不必要である。
6.1.6
試験の対象であり,負荷に耐え,及び/又はエネルギーを吸収する部材として設計された全ての構
造部材は,箇条7の材料規定に適合しなければならない。
6.2
ROPSの側方負荷試験
6.2.1
側方負荷は,ROPSの頂部構造部材にかける。
負荷分散器具が構造部材に接する高さは,Hを超えてはならない。
負荷分散器具は,ROPSの構造部材の輪郭に接するよう整形した形状としてもよい。
6.2.2
着力点は,長さLとDLVの前後の面の垂直投影線によって決定する。すなわち,着力点は1柱式
又は2柱式ROPSの支柱からL/3以内にあってはならない。L/3の点がDLVの垂直投影線と1柱式又は2
柱式ROPSの支柱との間にあるときは,それがDLVの垂直投影内に入るまで,着力点をROPS支柱から離
れる方向に動かさなければならない(図3参照)。
負荷は,DLVの中心線が機械の中心線から最大の距離にある側のROPSの側面から負荷しなければなら
ない。
6.2.3
3柱式以上のROPSの場合は,着力点はDLVの前後の境界面の垂直投影線の間に置かなければな
らない(図4参照)。
6.2.4
運転席が旋回フレームの前後方向の中心線上より外れている場合,負荷は運転席に近い側の最外端
から加えなければならない。
6.2.5
側方負荷は運転席に近い側の最外端で,作業装置から最も離れた位置から加えなければならない。
6.2.6
側方負荷の最初の方向は,水平で,かつ,旋回フレームの前後方向中心線を通る垂直面に対して垂
直でなければならない。負荷の継続とともにROPS又は旋回フレームに変形が生じ,負荷の方向が変化す
ることがあるが,これは許容される。
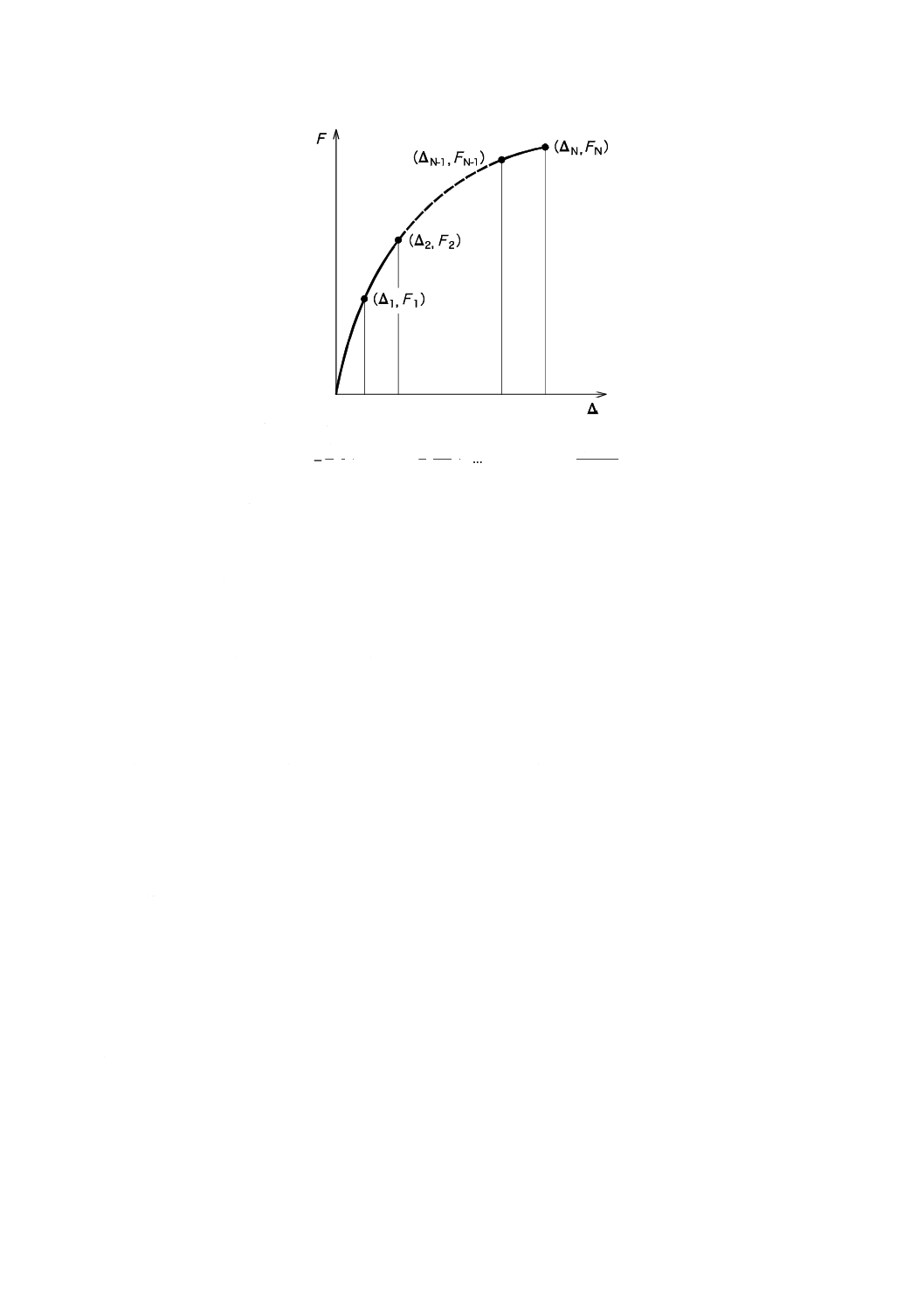
6.2.7
たわみの速度は,負荷が静的であると考えられる程度とする。着力点(LAP)におけるたわみ速度
が5 mm/s以下の場合は,静的負荷とみなされる。15 mm以下の変位量ごとに,着力点で測定した荷重と
たわみ量を記録しなければならない。この負荷はROPSが荷重及びエネルギーの両要求レベルを達成する
か,又はROPSの着力点(LAP)が機械側面の剛性の高い箇所によって規定されたLBSGPに達するまで続
けなければならない。エネルギーUの計算方法については,図9を参照。ただし,エネルギーUの計算に
用いるたわみ量は,負荷の作用方向に沿ったROPSのたわみ量とする。負荷装置を支えるいかなる部材の
たわみも,全たわみ量に含めてはならない。
14
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
エネルギーU
(
)
(
)
2
...
2
2
N
1
N
1
N
N
2
1
1
2
1
1
F
F
F
F
F
U
+
∆
−
∆
+
+
+
∆
−
∆
+
∆
=
−
−
F
荷重
Δ たわみ
図9−負荷試験時の荷重−たわみ曲線
6.3
ROPSの前後方向負荷試験
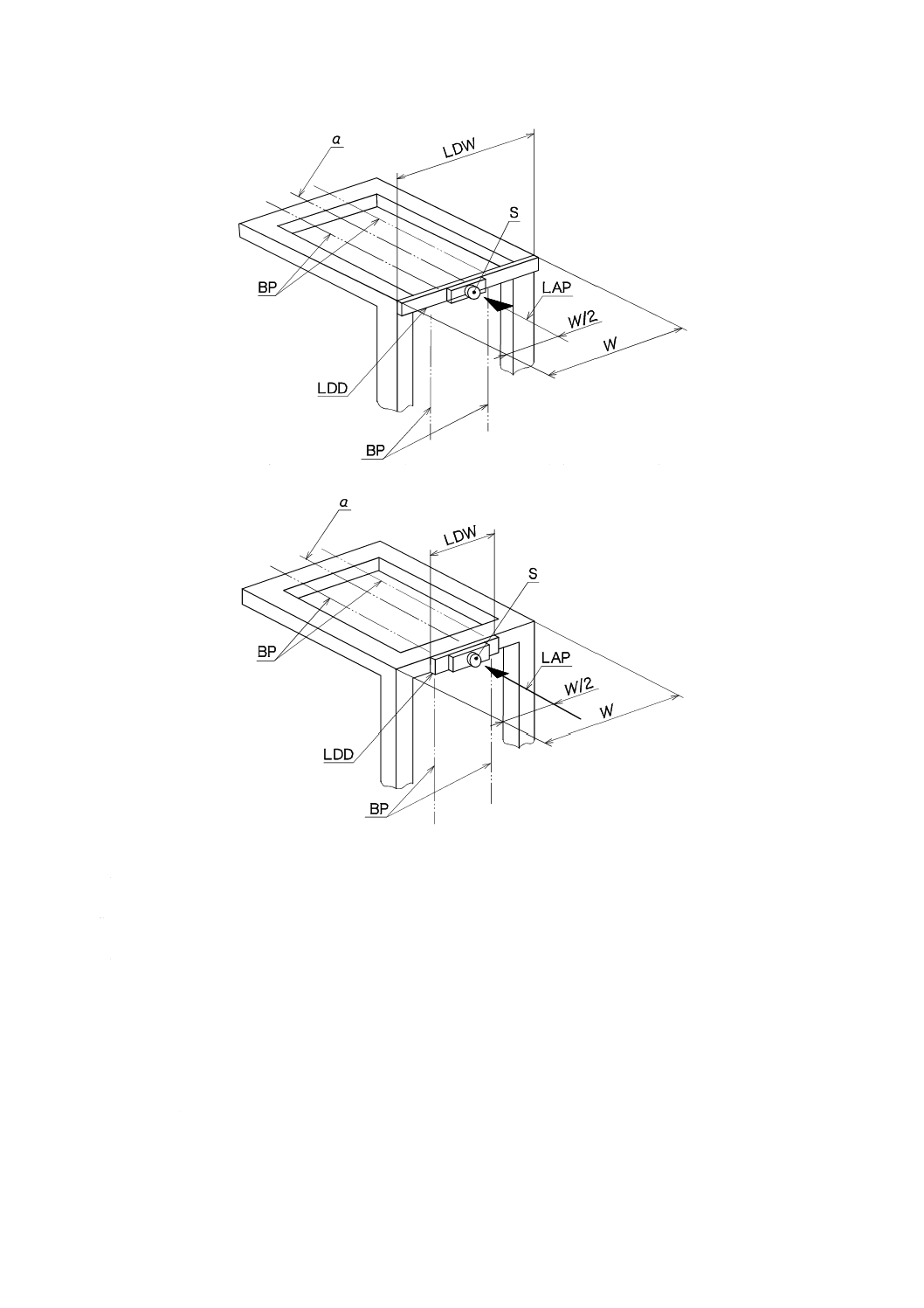
6.3.1 側方負荷を除去した後,前後方向負荷を機械の後方からROPSの頂部部材にROPSの前後方向中心
線に沿って負荷する。ROPSが変形していても負荷を継続できるように,負荷分散器具はW全幅に負荷を
分散するのがよい(図5及び図10参照)。
6.3.2 前後方向負荷は,側方負荷に先立って設定された図10の位置に負荷しなければならない。
負荷分散器具は,W全幅にかからなければならない(図10参照)。
6.3.3 前後方向負荷は,負荷に先立って設定された図3の位置に負荷しなければならない。座屈を起こさ
ずに負荷を伝達できる後(前)のクロスメンバがない場合には,負荷分散器具は全幅にわたるものとする。
その他の全ての場合,負荷分散器具の長さは,ROPSの幅Wの80 %を超えて負荷を分散させてはならない
(図10参照)。
6.3.4 どの機械の場合でも,前後方向負荷の向き(前又は後)は,ROPSと旋回フレームの組立品にとっ
て最も厳しい条件となる向きを選ばなくてはならない。最初の負荷方向は,水平で,かつ,機械の前後方
向中心線に平行でなければならない。前後方向負荷の向きを決めるに当たって,更に次の事項を考慮しな
ければならない。
a) DLVに対するROPSの位置及びROPSの前後方向のたわみが,運転員を押しつぶさないよう保護する
効果。
b) 例えば,他の機械の構造部材がROPSの前後方向たわみに抵抗し,ROPSに対する負荷の前後方向成
分の方向を制限することなどの機械の特性。
c) 前後方向の転倒の可能性,又は実際の転倒の間,前後方向軸のまわりに回転するときに機械が斜めに
なるような傾向をもつ特殊な機種であることを示す経験。
15
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 座屈を起こさずに負荷を伝達できる後(前)のクロスメンバがない場合の前後方向負荷分散器具
b) その他の場合の前後方向負荷分散器具
BP
境界面
LAP 着力点
LDD 負荷分散器具
S
ソケット
LDW 負荷分散器具の幅(後部のクロスメンバがない場合はROPSの全幅で,クロスメンバがある場合は0.8 W以内。)
W
ROPSの幅
a
機械前後方向中心線に平行な線
図10−前後方向負荷分散器具
6.3.5
後方からの負荷は,ROPSの前後方向中心線に沿ってROPSの上部構造部材に負荷する。これは機
械の上部旋回体が下部走行体に対して時計回りに0°〜90°旋回した位置にあるときに転倒したとき(の
負荷)を対象としており,前後方向エネルギー要求事項を適用する(指針として6.2.7を参照し,許容基
準としては箇条8を参照)。
6.3.6
たわみの速度は,負荷が静的であるとみなせる程度とする(6.2.7参照)。
16
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この負荷は,ROPSが前後方向エネルギー要求を満足するか,又はROPSの変形が機械上部の剛性の高
い箇所で設定されるLBSGP又はVBSGPに到達するまで続けなければならない。
6.4
ROPSの垂直負荷試験
6.4.1
側方負荷試験及び前後方向負荷試験の完了後,ROPS頂部に垂直荷重を負荷する。
6.4.2
全てのROPSに対し,垂直荷重の中心は,6.2の側方負荷のように変形前のROPS構造上で定めた
のと同一垂直面内で,ROPS構造の前後方向中心線に直角に負荷する。
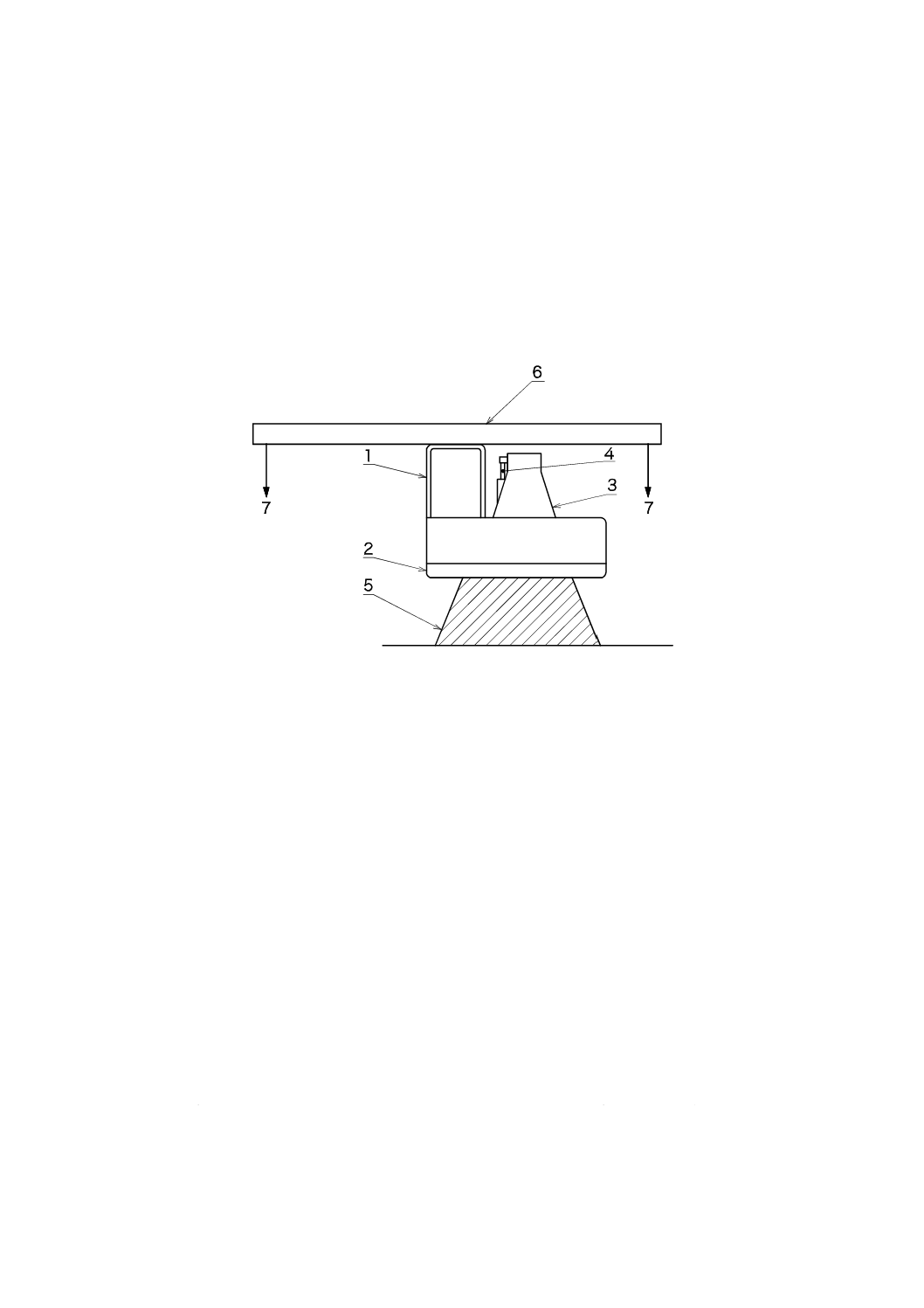
6.4.3
ROPS上にかける垂直荷重は,変形したROPSの(6.1.2でマークした)前後方向中心線に対称に,
分散方法の制限なく負荷する。図11に垂直荷重の適用例を示す。
1
ROPS
2
旋回フレーム
3
ブーム
4
ブームシリンダ
5
ベッドプレート
6
垂直負荷器具
7
垂直荷重
図11−垂直負荷
6.4.4
たわみの速度は,負荷が静的であると考えられる程度とする(6.2.7参照)。
この負荷は,荷重のレベルが表1の規定に達するまで,又はROPSの変形が機械上部の剛性の高い箇所
で設定したVBSGPに到達するまで続ける。
保護構造は,5分間又は変形が終了するまでのうち,いずれか短い方の時間だけこの荷重を支えなけれ
ばならない。
7
材料の温度基準
7.1
負荷要求事項のほかに,ROPSがぜい(脆)性破壊に対して十分な耐性をもたせるために,材料−温
度要求事項を規定する。この要求事項は,引き続いて製造するROPSの材料が,試験に使用した供試品と
同等以上の強度特性をもつ場合には,全ての構造部材を−18 ℃以下の温度の中で静的負荷試験を行うこと
によって達成される。代替法として,この要求事項は,全てのROPS構成部材が7.2〜7.4に示す機械的要
求事項を満たす場合には,より高い温度下での負荷試験によっても達成される。
17
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2
構造結合に使用するボルト及びナットは,JIS B 1051に規定する強度区分8.8,9.8又は10.9のボル
ト,及びJIS B 1052-2に規定する強度区分8又は10のナットとするのがよい。
注記1 (対応国際規格ではフートポンド法を用いる国に対する注意事項を記載しているが,JISで
は削除した。)
注記2 強度区分10.9を超えるボルト及び強度区分10を超えるナットは,ぜい(脆)性破壊及び遅
れ破壊を避けるためにより厳密な品質管理を必要とすることがある。
7.3
ROPS構成部材及びこれを旋回フレームに取り付けるのに使用する材料は,−30 ℃において,表1
に示すシャルピーVノッチ(CVN)衝撃強度の一つを満足するか,若しくはそれ以上の鋼材であるか,又
は7.4に示す基準に適合しなければならない(シャルピーVノッチ衝撃試験による評価は,元来,品質管
理上のチェックのためのものであって,表示した温度は必ずしも直接に使用条件に関係するものではな
い。)。
表1−シャルピーVノッチ試験の最小衝撃強度
試験片寸法
mm
エネルギー基準
−30 ºC a)にて
J
エネルギー基準
−20 ºC a)にて
J
試験片寸法
mm
エネルギー基準
−30 ºC a)にて
J
エネルギー基準
−20 ºC a)にて
J
10×10 b)
10×9
10×8
10×7.5 b)
10×7
10×6.7
11
10
9.5
9.5
9
8.5
27.5
25
24
24
22.5
21
10×6
10×5 b)
10×4
10×3.3
10×3
10×2.5 b)
8
7.5
7
6
6
5.5
20
19
17.5
15
15
14
注a) −20 ºCにおけるエネルギー要求値は,−30 ºCにおける規定値の2.5倍である。ただし,衝撃エネルギー
強度には,その他の,例えば,ロール方向,降伏点,粒塊形成及び溶接といった要因も影響する。鋼材の
選定及び使用に当たっては,これらのことも考慮しなくてはならない。
b) 推奨寸法を示す。試験片の寸法は,各推奨寸法のうち可能な範囲で最大の寸法を下回ってはならない。
試験片はロールの圧延方向にとり,ROPSとして成形又は溶接する前の板材,管材,形鋼などから取ら
なければならない。管材又は形鋼の試験片は,最長寸法の中央部からとり,溶接部を含んではならない(JIS
Z 2242参照)。
7.4
次のものは,シャルピーVノッチ衝撃試験の要求事項に適合したものとみなす。
a) 厚さが2.5 mm未満で,最大炭素含有量が0.20 %の鋼。
b) 厚さが2.5 mm以上4.0 mm以下で,最大炭素含有量が0.20 %の細粒化キルド鋼。
8
許容基準
8.1
一つの代表的な供試品の試験において,一定の側方荷重及びエネルギー,前後方向エネルギー及び
垂直耐負荷能力をそれぞれ満足するか又はこれらを超えなければならない。
キャブライザのない機械に対する要求値を決定するには,表2に示す算定式を使用しなければならない。
キャブライザを装着した機械に対する要求値を決定するには,表3に示す算定式を使用することができ
る。
側方負荷試験での荷重とエネルギーの要求値は,同時に達成される必要はない。いずれか一方が他が達
成される前に要求値を超えることがあり得る。エネルギー要求値に達する前に,荷重が要求値に到達し,
この後(負荷継続中)に,一旦要求値以下に下がることがあるが,この場合には,側方エネルギーの要求
18
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
値を満足又は超過した時点で,荷重が再び要求レベルに達していなければならない。
ROPS又はキャブ構造への負荷は,表2及び表3に示すエネルギー又は荷重のレベルを満たす前に,
LBSGP又はVBSGPに到達した時点で打ち切ってもよい。
表2−エネルギー及び荷重を算定する計算式−キャブライザなしの機械
側方エネルギーUs(J)
13 000×(M/10 000)1.25
側方荷重Fs (N)
35 000×(M/10 000)1.2
前後方向エネルギーUf (J)
4 300×(M/10 000)1.25
垂直負荷FV(N)
12.75×M
表3−固定式キャブライザ付き機械のエネルギー及び荷重を算定する計算式(参考)
高さ500 mm以下の
キャブライザ装着
高さ500 mmを超え,1 300 mm
以下のキャブライザ装着
高さ1 300 mmを超える
キャブライザ装着(TOPS)
側方エネルギーUs (J)
13 000×(M/10 000)1.25
13 000×(M/10 000)1.25
13 000×(M/10 000)1.25
側方荷重Fs (N)
35 000×(M/10 000)1.2
50 000×(M/10 000)1.2
50 000×(M/10 000)1.2
前後方向エネルギーUf (J)
4 300×(M/10 000)1.25
4 300×(M/10 000)1.25
4 300×(M/10 000)1.25
垂直荷重FV (N)
12.75×M
19.61×M
7×M
注記1 キャブライザ付きのショベルの転倒時の挙動については,更なる検討が必要である。製造業者は,妥当な
実績及び経験に基づいてキャブライザの高さに応じたリスクを考慮して必要な保護を決定するのがよい。
注記2 この表の計算式は,参考としてだけ用いる。
8.2
ROPSのたわみに関する制限は絶対的である。側方負荷試験中いかなるときも,ROPSのいかなる部
分もDLVのLA(JIS A 8910の附属書1参照)より上の部分に入り込んではならない。ただし,6.1.5に従
って検証したLBSGPにたわみが到達することによって負荷が制約される場合を除く。8.5に規定するよう
に,DLVは傾斜してもよい。
8.3
前後方向負荷試験中いかなるときも,ROPSのいかなる部分もDLVに入り込んではならない。8.6
に規定するように,DLVは傾斜してもよい。
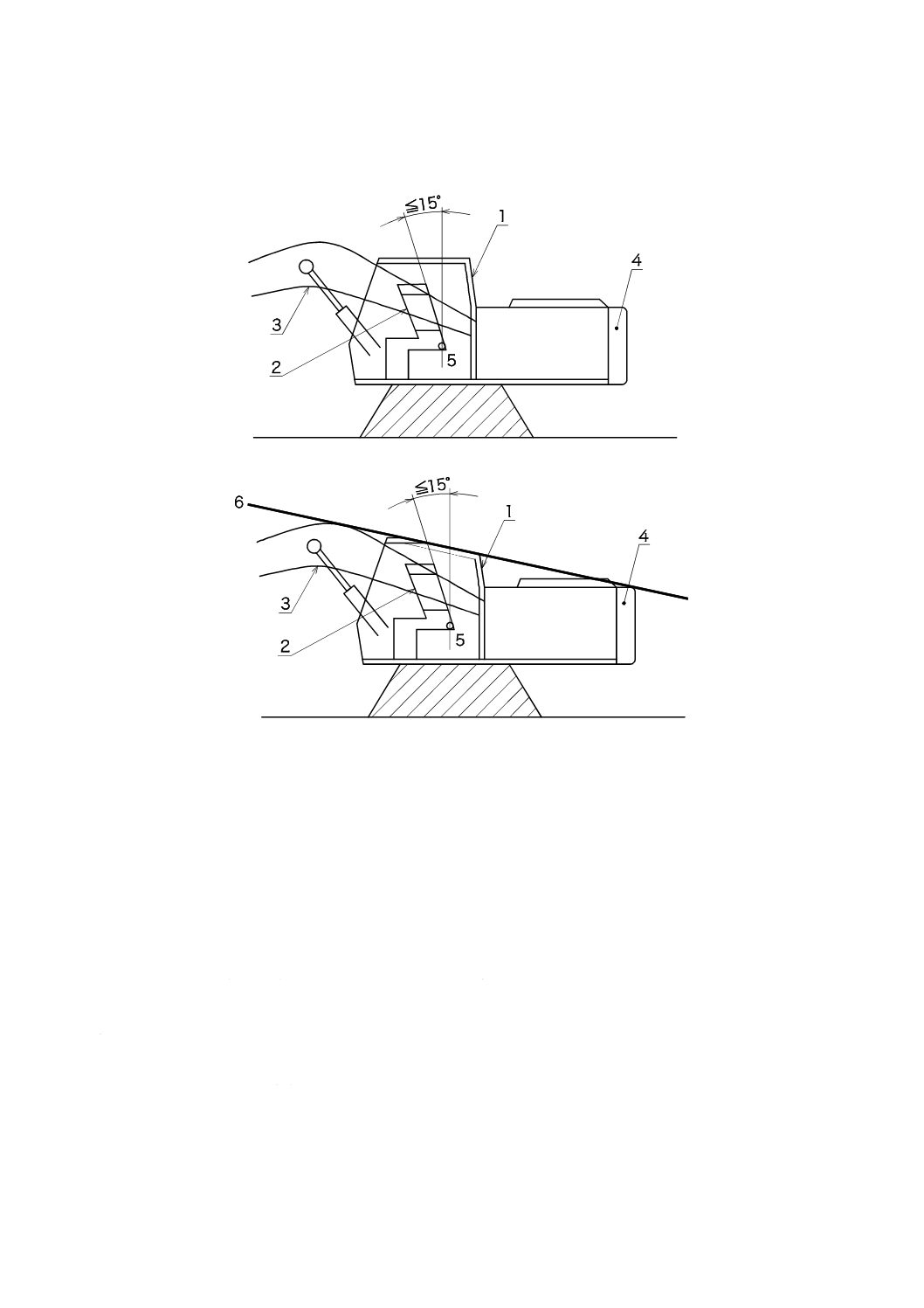
8.4
垂直負荷試験中いかなるときも,ROPSのいかなる部分もDLVに入り込んではならない。ただし,
6.1.5に従って検証されたVBSGP[図13 b)参照]に変位が到達することによって負荷が制約される場合を
除く。8.5及び8.6に規定するように,DLVは傾斜してもよい。
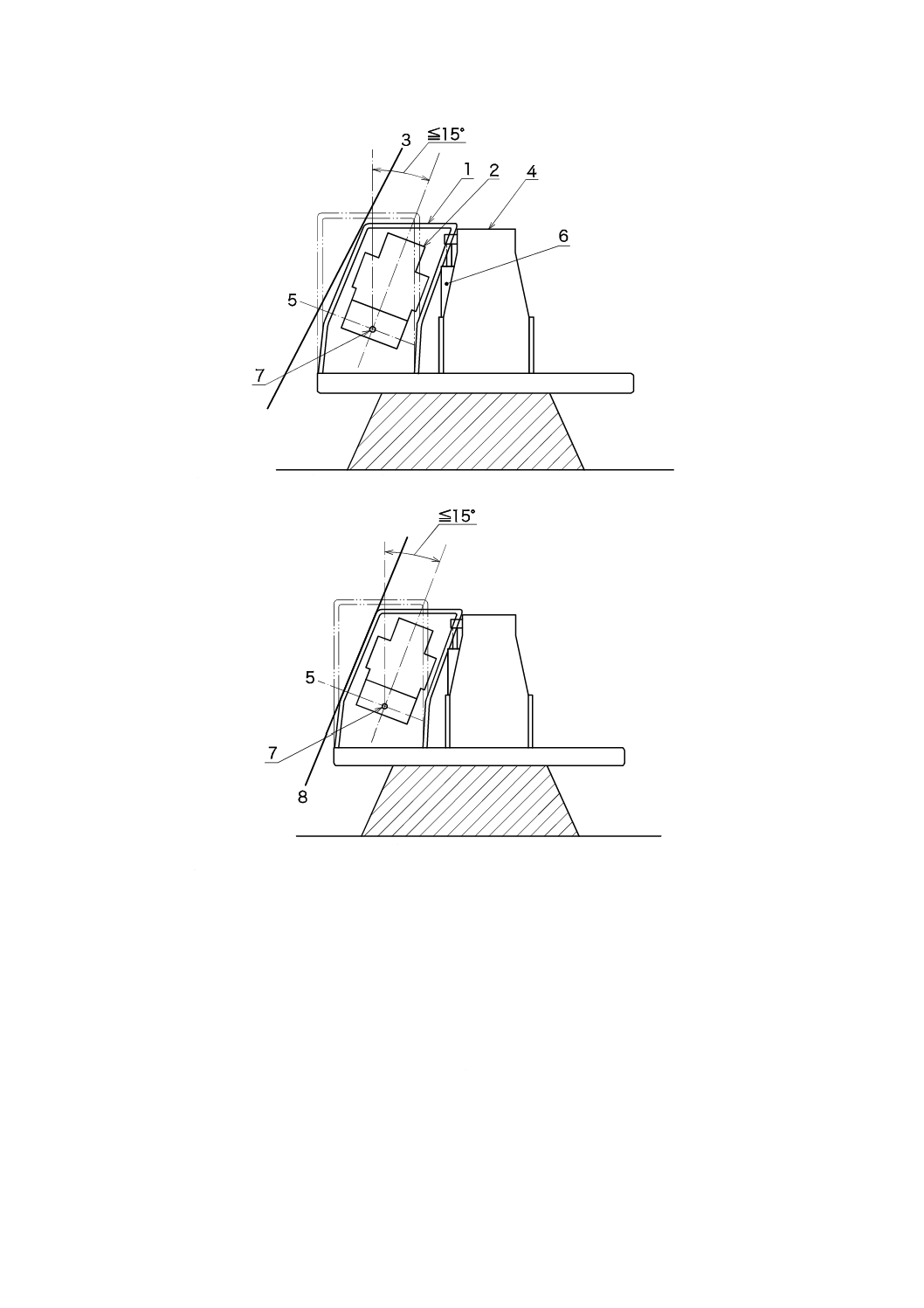
8.5
側方負荷時,DLVのSIP(JIS A 8318参照)より上の部分を側方に15°まで傾けてもよい。より小
さい角度において,機械構成部品の一部又は操縦装置が邪魔になるような場合には,DLVの側方への回転
は,15°未満にしなければならない(図12参照)。DLVを取り付けた床の変形によってDLVの上部が更
に回転してもよい。
19
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 試験負荷用のブーム及びブームシリンダを含めた旋回フレームを取り付けたROPS
b) ROPS及びLBSGP
1
ROPS
2
DLV
3
LSGP
4
ブーム
5
LA
6
ブームシリンダ
7
SIP
8
LBSGP
注記 側方負荷の除去後,前後方向負荷及び垂直負荷に起因して上図以外にROPSの変
形が増すことがあり得るが,ROPSはそのような変形も含め前後方向,次いで垂
直の許容基準によって確認しなければならない。
図12−DLV上部の傾斜
8.6
前後方向負荷の間中,ROPS部材の貫入を防ぐため,DLVの上部をJIS A 8910の附属書1に規定す
20
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
る基準軸LAの周りに前方15°まで傾けてもよい。より小さい角度において,機械構成部品の一部又は操
縦装置が邪魔になるような場合,DLVの前方への回転は,15°未満にしなければならない。
a) 試験負荷用の作業装置を含めた機械の上部構造体を取り付けたROPS
b) ROPS及びVBSGP
1
ROPS
2
DLV
3
ブーム
4
カウンタウェイト
5
LA,SIP
6
VBSGP
図13−垂直負荷時のDLVの前方への傾斜
8.7
ROPS,その取付部又は旋回フレームの破損によって,ROPSが旋回フレームから脱落するようなこ
とがあってはならない。部分的な破損があったとしても,ROPSは,要求される荷重及びエネルギーレベ
ルでは機械から完全には脱落しないことを示さなければならない。
9
ROPSのラベル表示
9.1
一般
この規格の要求事項に適合したROPSには,9.2及び9.3に従ってラベル表示しなければならない。
このラベルには,OPG(JIS A 8922参照)又はFOPS(落下物保護構造)に関する情報を含めても差し支
えない。
21
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.2
ラベルの仕様
9.2.1
ラベルは,耐久性のあるものとし,ROPS構造に永久的に取り付けなければならない。
9.2.2
ラベルは,容易に読み取れ,かつ,天候による劣化を防ぐことのできるROPS構造上の位置に取り
付けなければならない。
9.3
表示の内容
表示の内容は,ROPS製造業者の名称及び所在のほか,次のとおりとする。
a) ROPSの型式及び識別番号
b) ROPSが装着可能な機械の型式名称又は製造番号
c) ROPSが,その全ての性能基準に合格する日本工業規格番号(国際規格・地域規格・規制を含めても
よい。)
d) 製造業者が必要と考えるその他の事項(例えば,取付け,修理又は取替えに関する情報)
10 試験結果報告
試験結果は,附属書Aに示す試験報告書様式を用いて報告する。
11 取扱説明書
機械の製造業者は,この規格に適合するROPSがどの機種まで適用可能か,そのROPSが保護構造とし
て証明された機械本体,作業装置(適用可能な場合には,それらの派生機種も含む。)の仕様を取扱説明書
に明確に記述しなければならない。
22
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
JIS A 8921-2に適合するROPSの試験報告書
A.1 確認事項
A.1.1 ROPS装着機械
形式 ...........................................................................................................................................................
製造業者 ...................................................................................................................................................
型式 ...........................................................................................................................................................
製造番号 ...................................................................................................................................................
旋回フレーム部品番号 ............................................................................................................................
A.1.2 ROPS
製造業者 ...................................................................................................................................................
形式及び型式 ...........................................................................................................................................
製造番号 ...................................................................................................................................................
ROPS部品番号.........................................................................................................................................
A.2 機械製造業者からの情報
A.2.1 ROPS
このROPSを適用できる機械群の最大運転質量............................................................................. kg
試験に用いた機械の運転質量 ........................................................................................................... kg
幾何データ ...............................................................................................................................................
DLVの位置 ..............................................................................................................................................
A.2.2 負荷条件
側方境界仮想地面(LBSGP)の三次元データ ......................................................................................
天頂境界仮想地面(VBSGP)の三次元データ .....................................................................................
A.3 性能基準
側方負荷荷重 ...................................................................................................................................... N
側方負荷エネルギー ............................................................................................................................ J
前後方向負荷エネルギー .................................................................................................................... J
垂直負荷荷重 ...................................................................................................................................... N
A.4 試験結果
A.4.1 側方境界仮想地面(LBSGP)及び天頂境界仮想地面(VBSGP)の位置
側方境界仮想地面(LBSGP)の幾何データ ..........................................................................................
天頂境界仮想地面(VBSGP)の幾何データ .........................................................................................
A.4.2 側方負荷試験
ROPS構造部材がDLVへ侵入することなしに,次の荷重及び/又はエネルギーレベルに達し,又はこれ
23
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を超過することができた。
エネルギー要求値に到達又はそれを超えた後に達成した最大荷重 ............................................... N
到達した吸収エネルギー値 ................................................................................................................. J
又は
負荷が8.1に記述した状態に到達した。
到達負荷荷重 ...................................................................................................................................... N
到達負荷エネルギー ............................................................................................................................ J
機械の側面の剛性の高い箇所に負荷した側方荷重 .......................................................................... N
DLVとROPSとの隙間 ................................................................................................................... mm
A.4.3 前後方向負荷試験
ROPS構造部材がDLVに侵入することなしに,次のエネルギー値に到達し,又はこれを超過した。
到達最大エネルギー値 ........................................................................................................................ J
DLVとROPSとの隙間 ................................................................................................................... mm
A.4.4 垂直負荷試験
ROPS構造部材がDLVに侵入することなしに,次の垂直負荷荷重値に到達し,又はこれを超過した。
最大負荷荷重 ...................................................................................................................................... N
又は
到達負荷荷重 ...................................................................................................................................... N
機械頂部の剛性の高い箇所に負荷した垂直荷重.............................................................................. N
DLVとROPSとの隙間 ................................................................................................................... mm
A.4.5 温度及び材料
A.4.5.1
負荷試験は,ROPSと旋回フレーム部材を用いて気温 ℃で行った。
A.4.5.2
(A.4.5.1が−18 ℃より低い温度の場合だけ記入)
ROPSを構成する鋼材のシャルピーVノッチ衝撃試験結果は,次のとおりである。
試験片の寸法
mm× mm
エネルギー値 ....................................................................................................................................... J
ナットの強度区分 ....................................................................................................................................
ボルトの強度区分 ....................................................................................................................................
A.5 証明書
機械の最大質量 kgに対する本試験において,JIS A 8921-2に規定する最小性能要求事項を満足
した。
ROPS型式 ................................................................................................................................................
試験ROPSを装着した油圧ショベルの型式 ..........................................................................................
試験年月日 ...............................................................................................................................................
試験機関の名称及び所在地 .....................................................................................................................
試験担当者 ...............................................................................................................................................
試験報告書の日付 ....................................................................................................................................
24
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
設計変更,実物試験及び改造
B.1
設計変更
ROPS又は機械フレームに設計変更を行った場合,次のいずれかの場合を除き実物試験が必要である。
a) 実物試験を実施した既存の設計に対する小変更であると判断できるとき。
b) その変更がROPS及び機械フレームの性能に不都合な影響を及ぼさないとき。
B.2
改造又は補修
変形したと認められるROPS構造は,再使用されない。
製造業者の承認がない限り,保護構造に改造又は補修を加えることは許されていない。正当な承認なし
に改造又は補修したROPS保護構造は,この規格に適合しない。
B.3
実物試験の代用
主要部が新規設計のROPSの理論的な性能解析は,実物試験の代用としては認められていない。
25
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
理論的根拠−ROPS性能要求事項
C.1 一般
この附属書では,要求基準をどのように作成したかについて説明している。
論点は,油圧ショベルの次の特性によって,油圧ショベル用のROPSの基準を,他の土工機械用のROPS
の基準に対して異なったものとして規定する必要性があるかどうかである。
− 横転又は転倒時にブーム及び他の剛性の高い箇所による保護の可能性
− 比較的大型の作業装置(ブーム,アーム及びバケット)及びその結果としての機械の広い作業範囲
− 上部旋回体の360°旋回
この規格の主たる技術的な基礎は,次による。
− 世界中の事故の解析
− 実際の転倒実験
− 米国及び日本で実施したADAMS又はPAM/CRASHソフトウェアを使用したシミュレーション解析
− 日本の専門家が実施した更なるシミュレーション解析
− ミニショベルの横転実験
C.2 境界仮想地面(BSGP)
油圧ショベルが転倒又は横転したときに,油圧ショベルのブームが運転員をかなりの程度まで保護する
ことがあることが,一般に知られている。例えば,日本での1996年から1999年における公共工事での横
転・転倒・落下事故38件の報告では,そのうち31件で,キャブの変形は限定され,DLVが基本的に確保
されていたことが示されている。このような保護を考慮して,境界仮想地面(BSGP)の考え方を導入して
いる。
油圧ショベルが転倒したときに(できごとの1),機械が地面と接する3点(ブームの最高部分,キャブ
を支持するフレームの前左端,カウンタウェイトの上部左端)を通る平面を想定し,運転員の空間(DLV
で代表する)がROPSの構造部材又は地面と接触しないと想定すると,キャブ内の運転員が有効に保護さ
れていると考えられる。機械が上下逆さまになったとき(できごとの2),ブーム頂部とカウンタウェイト
後端頂部とが地面と接触し,DLVはROPSの構造部材又は地面と接触しないと想定すれば,キャブ内の運
転員は,この場合も保護されていると考えられる。
この規格では,JIS A 8910で定義し使用している側方仮想地面(LSGP)及び天頂仮想地面(VSGP)と
の混同を避けるため,境界仮想地面(BSGP)(LBSGP及びVBSGP)との用語を使用しており,“できごと
の1”ではLBSGPとして定義し,“できごとの2”ではVBSGPとして定義している。
C.2.1 BSGPの剛性の高い箇所
LBSGPは,カウンタウェイト左側面,ブーム左側面の最高位置及びキャブを支持するフレームの左側前
端の剛性の高い箇所3点を含む平面である。
VBSGPは,ブームの頂部及びカウンタウェイト後部のりょう(稜)線の,剛性の高い3か所を含む。
C.2.2 剛性の高い箇所の検証
それらの箇所が十分に剛性が高いか否かを検証するため,機械の質量に重力加速度を乗じた荷重(重量
26
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に相当する荷重)を各箇所に負荷して,そのときに生じた変位を考慮してLBSGP及び/又はVBSGPを設
定するのが適切と考えられる。ROPSの評価のために,LBSGP及び/又はVBSGPの基準を適用すること
を決定した場合は,6.1.5に規定した検証方法が必要となる。
注記 6.1.5の剛性の高い箇所の検証手順は,任意である。表2及び表3の負荷要求値に適合するよう
ROPSを設計するか,又は,側方負荷に対してはLBSGPによって,垂直負荷に対してはVBSGP
によって,ROPSがDLVに侵入することのないよう機械の剛性の高い箇所を適切に設計するか
は,製造業者の選択である。後者の場合には,検証手順が必要となる。
C.2.3 LBSGP及び/又はVBSGPを適用する場合の実物試験の必要性
LBSGPの基準及び/又はVBSGPの基準を適用することは,ROPSの側方,前後方向及び垂直負荷試験
の省略を意味しない。LBSGP基準は,側方負荷試験において適用し,表2及び表3のエネルギー及び荷重
要求を置き換えるものである。同様にVBSGP基準は,垂直負荷試験において適用し,表2及び表3の垂
直荷重要求値を置き換えるものである。
C.3 前後方向エネルギー
(油圧ショベルの)転倒実験は,上部旋回体と下部走行体とを平行の状態として実施した。この場合,
ROPSに対する前後方向のエネルギー負荷がないか,あっても無視できるほど僅かであると想定していた。
しかし,米国で実施したシミュレーション解析では,上部旋回体が下部走行体に対してある程度の角度を
なした状態で機械が転倒したときには,前後方向に顕著なエネルギー負荷が発生する場合があることが明
らかとなった。
上部旋回体が下部走行体に対して反時計回りの角度の位置で転倒したときは,エネルギーの一部はキャ
ブの左側前部に前後方向に負荷される。しかしながら,このような姿勢で機械が転倒するのはまれである
と考えられ,また,そうなったとしても,キャブの損傷は側方境界仮想地面(LBSGP)によって制約され
て転倒するのは僅かであろうし,その結果,運転員は確実に保護されるであろう。
注記 日本が実施した追加シミュレーション解析では,上部旋回体が下部走行体に対して反時計回り
の角度で,作業装置が床面最大掘削半径の状態からは,機械は転倒しにくいことが示された。
床面最大掘削半径の位置からブームを持ち上げれば,機械の転倒が発生する可能性がでてくる
が,ブームを持ち上げるとLBSGPによってキャブの変形がより制約されることになろう。
上部旋回体が下部走行体に対して時計回りの角度の位置で転倒した場合,(キャブの)後方からある程度
の負荷がかかると考えられる。日本で実施した追加シミュレーション解析では,上部旋回体が下部走行体
に対して平行の場合の前後方向荷重は1.47 M(0.15 Wf,機械重量の0.15倍)であり,時計回りの角度の位
置では,1.37 M(0.14 Wf,機械重量の0.14倍)であった。この値は,比較的小さいので,前後方向負荷に
関しては,側方負荷エネルギー要求の1/3のエネルギー負荷を本文で規定している。この1/3のエネルギ
ー負荷条件は,ミニショベル用TOPS(JIS A 8921参照)に対する前後方向負荷の推奨値によっている。
C.4 垂直負荷荷重
機械が上下逆さまの位置になったときに,他の土工機械では主としてキャブが機械を支えるのに対して,
油圧ショベルでは主としてブームが機械を支えるであろうと考えられる。このため,(油圧ショベルにおい
ては)他の土工機械用ROPSの垂直負荷荷重の要求値2 W(19.61 M)より軽減してもよいと考えられる。
20 tクラスの油圧ショベルを使用した実機転倒実験の結果では,垂直負荷荷重はおおよそ1 W(9.8 M)(残
留ひずみを無視)から0.7 W(7 M)(残留ひずみを考慮)であることを示している。PAM/CRASHソフト
27
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ウェアを使用したシミュレーション解析の結果では,垂直負荷荷重は,おおよそ0.9 W(9 M)から1.2 W
(12 M)の間である。
これらの結果に基づいて,平均値に偏差を加えて1.3 Wの値を導いた。
注記 日本で実施した追加シミュレーション解析では,ROPSに対する垂直負荷荷重は,上部旋回体
が下部走行体に対して平行の状態では11.6 M(1.18 W)であり,時計回りの状態では11.3 M(1.16
W)であった。
C.5 台上試験における最悪条件での負荷
この規格に適合するROPSの確認試験では,最悪条件での負荷を考慮して実施するのが望ましい。例え
ば,ROPSに側方負荷する場合には,ROPSの最弱部であろう溶接部にブーム又はシリンダが接触し,ROPS
の性能に影響することがある。
C.6 側方負荷荷重
側方負荷荷重の基準を決定する目的で,油圧ショベルのROPS及びブルドーザのROPSの転倒時の側方
負荷荷重を計算する解析を実施した。ROPSの最大変位の状態での側方負荷荷重を比較すると,機械の質
量に対する負荷荷重の比では,油圧ショベルのROPSはブルドーザのROPSの値の半分であった。これに
よって,油圧ショベルのROPSの側方負荷荷重の基準をブルドーザのROPSの側方負荷荷重の基準の半分
として導入した。
C.7 DLVの傾斜
油圧ショベルのキャブが比較的狭いことを考慮して,DLV上部がSIP(LA)回りに15°まで傾斜しても
よいこととした。このことは,ミニショベル用TOPS(横転時保護構造,JIS A 8921参照)の許容基準から
導いた。
28
A 8921-2:2011 (ISO 12117-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS A 8320 土工機械−機械全体,作業装置及び構成部品の質量測定方法
注記 対応国際規格:ISO 6016,Earth-moving machinery−Methods of measuring the masses of whole
machines, their equipment and components(IDT)
[2] JIS A 8911 土工機械−シートベルト及びその取付部−性能要求事項及び試験方法
注記 対応国際規格:ISO 6683,Earth-moving machinery−Seat belts and seat belt anchorages−
Performance requirements and tests(IDT)
[3] JIS A 8920 土工機械−落下物保護構造−台上試験及び性能要求事項
注記 対応国際規格:ISO 3449,Earth-moving machinery−Falling-object protective structures−
Laboratory tests and performance requirements(IDT)
[4] JIS A 8921 土工機械−ミニショベル横転時保護構造(TOPS)−試験方法及び性能要求項目
注記 対応国際規格:ISO 12117,Earth-moving machinery−Tip-over protection structure (TOPS) for
compact excavators−Laboratory tests and performance requirements(IDT)
[5] JIS A 8922 土工機械−油圧ショベル−運転員保護ガードの試験及び性能要求事項
注記 対応国際規格:ISO 10262,Earth-moving machinery−Hydraulic excavators−Laboratory tests and
performance requirements for operator protective guards(IDT)
[6] JIS Z 2242 金属材料のシャルピー衝撃試験方法
注記 対応国際規格:ISO 148-1,Metallic materials−Charpy pendulum impact test−Part 1: Test method
(MOD)
[7] EN 13510,Earth-moving machinery−Roll-over protective structures−Laboratory tests and performance
requirements