A 8919:2007
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 操縦装置の配置 ················································································································ 3
4.1 操縦装置の位置 ············································································································· 3
4.2 主要操縦装置の間隔 ······································································································· 3
4.3 外力による動作又は損傷を防ぐ対策··················································································· 4
4.4 ペダルの滑り止め ·········································································································· 4
5 操縦装置の動き ················································································································ 4
5.1 通則 ···························································································································· 4
5.2 多機能操縦装置 ············································································································· 4
6 操作力···························································································································· 6
附属書A(規定)土工機械−本体の主要操縦装置 ······································································· 7
附属書B(規定)土工機械−作業装置の主要操縦装置 ································································ 10
附属書JA(参考)JISと対応する国際規格との対比表 ······························································· 13
A 8919:2007
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本建設
機械化協会(JCMA)及び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正すべ
きとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS A 8919:2000は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認について,責任は
もたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
A 8919:2007
土工機械-操縦装置
Earth-moving machinery-Operatorʼs controls
序文
この規格は,2004年に第2版として発行されたISO 10968を基に作成した日本工業規格であるが,対応
国際規格で規定として引用の国際規格ISO 15998(制定審議中)を推奨に変更し,また,国内法令の規定
を追加して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,運転員が搭乗する(JIS A 8308の定義を参照)土工機械の主要操縦装置について規定する
(遠隔操縦式の機械に関しては,ISO 15817を参照)。この規格の指,手,及び足による操縦についての規
定は,他の形式,配置及び操作方向の使用を妨げるものではない。しかしながら,それらの方式であって
も,運転員の安全及び人間工学的に配慮して,配置についての通則及び一般的な原則に従うことが望まし
い。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 10968:2004,Earth-moving machinery−Operatorʼs controls (MOD)
なお,対応の程度を表す記号(MOD)は,ISO/IEC Guide 21に基づき,修正していることを示
す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8308 土工機械−基本機種−用語
注記 対応国際規格:ISO 6165,Earth-moving machinery−Basic types−Vocabulary (IDT)
JIS A 8310-1 土工機械−操縦装置及び表示用識別記号−第1部:共通識別記号
注記 対応国際規格:ISO 6405-1,Earth-moving machinery−Symbols for operator controls and other
displays−Part 1: Common symbols (IDT)
JIS A 8310-2 土工機械−操縦装置及び表示用識別記号−第2部:特定機種,作業装置及び附属品識別
記号
注記 対応国際規格:ISO 6405-2,Earth-moving machinery−Symbols for operator controls and other
displays−Part 2: Specific symbols for machines, equipment and accessories (MOD)
JIS A 8314 土工機械−ホイール式機械−かじ取り装置要求事項
2
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 対応国際規格:ISO 5010,Earth-moving machinery−Rubber-tyred machines−Steering
requirements (IDT)
JIS A 8315 土工機械−運転員の身体寸法及び運転員周囲の最小空間
注記 対応国際規格:ISO 3411,Earth-moving machinery−Human physical dimensions of operators and
minimum operator space envelope (IDT)
JIS A 8316 土工機械−電磁両立性 (EMC)
注記 対応国際規格:ISO 13766,Earth-moving machinery−Electromagnetic compatibility (IDT)
JIS A 8325 土工機械−クローラ式機械−ブレーキ系の性能要求事項
注記 対応国際規格:ISO 10265,Earth-moving machinery−Crawler machines−Performance
requirements and test procedures for braking systems (MOD)
JIS A 8340-1 土工機械−安全−第1部:一般要求事項
注記 対応国際規格:ISO 3450,Earth-moving machinery−Braking systems of rubber-tyred machines−
Systems and performance requirements and test procedures (MOD)
JIS A 8345 土工機械−キーロック始動装置
注記 対応国際規格:ISO 10264,Earth-moving machinery−Key-locked starting systems (IDT)
JIS A 8407 土工機械−操縦装置の操作範囲及び位置
注記 対応国際規格:ISO 6682,Earth-moving machinery−Zones of comfort and reach for controls (IDT)
ISO 15817,Earth-moving machinery−Safety requirements for remote operator control
ISO/FDIS 15998,Earth-moving machinery−Machine control systems (MCS) using electronic components−
Performance criteria and tests for functional safety1)
注記1) 追って,出版される。
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
主要操縦装置 (primary control)
運転員が,頻繁に又は継続して使用する操縦装置(JIS A 8407参照)。
注記 主要操縦装置を,次に示す。
a) 本体に関して
1) かじ取り
2) クラッチ又はインチング
3) ギヤ選択
4) アクセル
5) 前後進
6) ブレーキ
7) 回転又は旋回
b) 作業装置に関して
1) 上げ又は下げ操作(例えば,ローダアーム,ドーザ装置,ショベル系掘削機ブーム,
サイドブームウインチ,機械式ショベルのウインチ)
2) ブーム延長,縮小又は屈折
3
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3) 引き又は押し操作(バックホウアーム)
4) アタッチメント操作(例えば,バケット,ショベルクイックカプラ,クラムシェル,
ハンマ,重ダンプトラックの荷台)
5) 回転又は旋回操作
3.2
補助操作装置 (secondary control)
運転員に頻繁に使用されることはないが,機械の必要機能(例えば,駐車ブレーキ,灯火など)の操作
装置。
3.3
機械の応答 (machine response)
操縦装置を操作したときの操縦装置の操作に対応した機械本体又は作業装置の動作。
例 バケット持ち上げ操作位置にレバーを動かしたときのバケットの上昇,及びクラムシェル閉じ操
作を閉じ位置に動かしたときのクラムシェルの閉じ動作。
3.4
操作力 (control actuation force)
操作機能を実行するために,操縦装置の接する面の中心に,その面の動作の方向に作用させる力。
注記 この力は,運転員が操作する力を典型的に表すものである必要はない。
3.5
遠隔操縦 (remote operator control)
機械と離れた位置の運転員が,有線又は無線によって土工機械を操縦すること。自動機械を遠隔操縦モ
ードで操縦することも含む。
4
操縦装置の配置
4.1
操縦装置の位置
主要操縦装置の位置は,JIS A 8315に適合しなければならない。また,JIS A 8407の指針も考慮するの
がよい。
4.2
主要操縦装置の間隔
4.2.1
隣接する操縦装置及び他の操縦装置などの機械部分との間隔は,隣接する操縦装置を誤って作動さ
せないよう十分大きくとらなければならない。独立操作,及び同時操作を行うための操縦装置の重なりは,
差し支えない。
4.2.2
指,手及び足で操作する操縦装置間,又は各種形式の操縦装置間及び隣接する他の部分との間隔は,
少なくとも次による。
注記 指で操作する,隣接する操縦装置の間隔は,装置の幅による。したがって,二つの隣接する操
縦装置の中心線は,装置が二つの操縦装置の間にどのように位置するかによって定まる。
− 指で操作する(指先で操作を行うけん盤式又は接触式は除く。)隣接する二つの操縦装置の中心線の間
隔は,次による。
1) 仕切り板なし:25 mm
2) 仕切り板あり:18 mm
− 手で操作する操縦装置の間隔(装置の周りの指の太さを含め):40 mm
− 足で操作する操縦装置の間隔:50 mm
4
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2.3
指,手及び足で操作する二つの操縦装置が同時操作を意図している場合,上記の間隔より接近する
ことは差し支えない。
補助操作装置の位置も,同様の原則に従うのがよい。
4.3
外力による動作又は損傷を防ぐ対策
操縦装置,リンク機構及びそれらへの動力伝導部は,外部からの予測できる力,例えば,手足による最
大力及び機械揺動(振動)によって破損したり,又は意図しない危険な位置に勝手に動いたりしないよう
取り付けるものとする。
4.4
ペダルの滑り止め
ペダルの表面は,滑り止めしたものとする。
操作のために足を滑らせる必要のあるペダル類は,滑り止めを施さなくともよい。
5
操縦装置の動き
5.1
通則
5.1.1
操縦装置の中立位置からの動きは,複合操作及び通常の使用において機械の動作が反対方向を指図
する場合(例えば,ショベル系掘削機の上部旋回体のように運転員の位置が機械の旋回部分にあるとき。)
以外は,操作による機械の応答は,ほぼ同じ方向とする。
5.1.2
機械が複数の運転位置を備えていて,それぞれに重複して操縦装置が配置されている場合,それら
のいずれもが,同じ方式で操縦するようになっていなければならない。一方が使用可能なときは,他方は
使用不可になっていなければならない。どちらが使用可能か,明りょう(瞭)に識別できる視覚的な表示
でなければならない。
転換式走行の位置がいずれであっても,かじ取り操作の動きと走行方向との対応が同じであることを維
持しなければならない。
5.1.3
すべての操縦装置は,デテント位置又は常時作動位置が設定されていない限り,運転員がそれらを
放したときには中立に戻るようにしなければならない。
5.1.4
動力源又はエンジンの始動若しくは停止のときに機械の各部分に危険な動きがあってはならない。
始動装置は,JIS A 8345に適合しなければならない。
5.1.5
制御信号が電気的に伝えられるときは,制御系はJIS A 8316に適合しなければならない。また,
ISO/FDIS 15998を指針として適用するのがよい。
5.1.6
運転員が取扱説明書の指示に基づいて運転席に乗り降りするときに,各種の操縦装置が意図せずに
作動しないように,操縦装置を配置するか,ロックするか又はガードする。
5.1.7
本体の主要操縦装置の典型的な形式,位置及び操作方法を附属書Aに,また作業機の主要操縦装
置形式,位置及び操作方法を附属書Bに規定する。他に規定されていない作業装置の操縦装置(例えば,
バックホウローダのバックホウ位置)は,附属書Bに規定されているのと同じ原則に従うのがよい。
5.1.8
識別シンボルは,操縦装置の上又はすぐ近くになければならない。スペースの制限がある場合には,
主要操縦装置の作動を示す図表を用いてもよいが,運転員が容易に視認できるものでなければならない。
操縦装置などの図記号は,JIS A 8310-1及びJIS A 8310-2によらなければならない。
5.2
多機能操縦装置
5.2.1
一般
本体及び/又は作業装置の運転に使用される多機能操縦装置については,5.1に加えて,次を適用する。
5.2.2
多機能操縦装置の基本動作
5
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
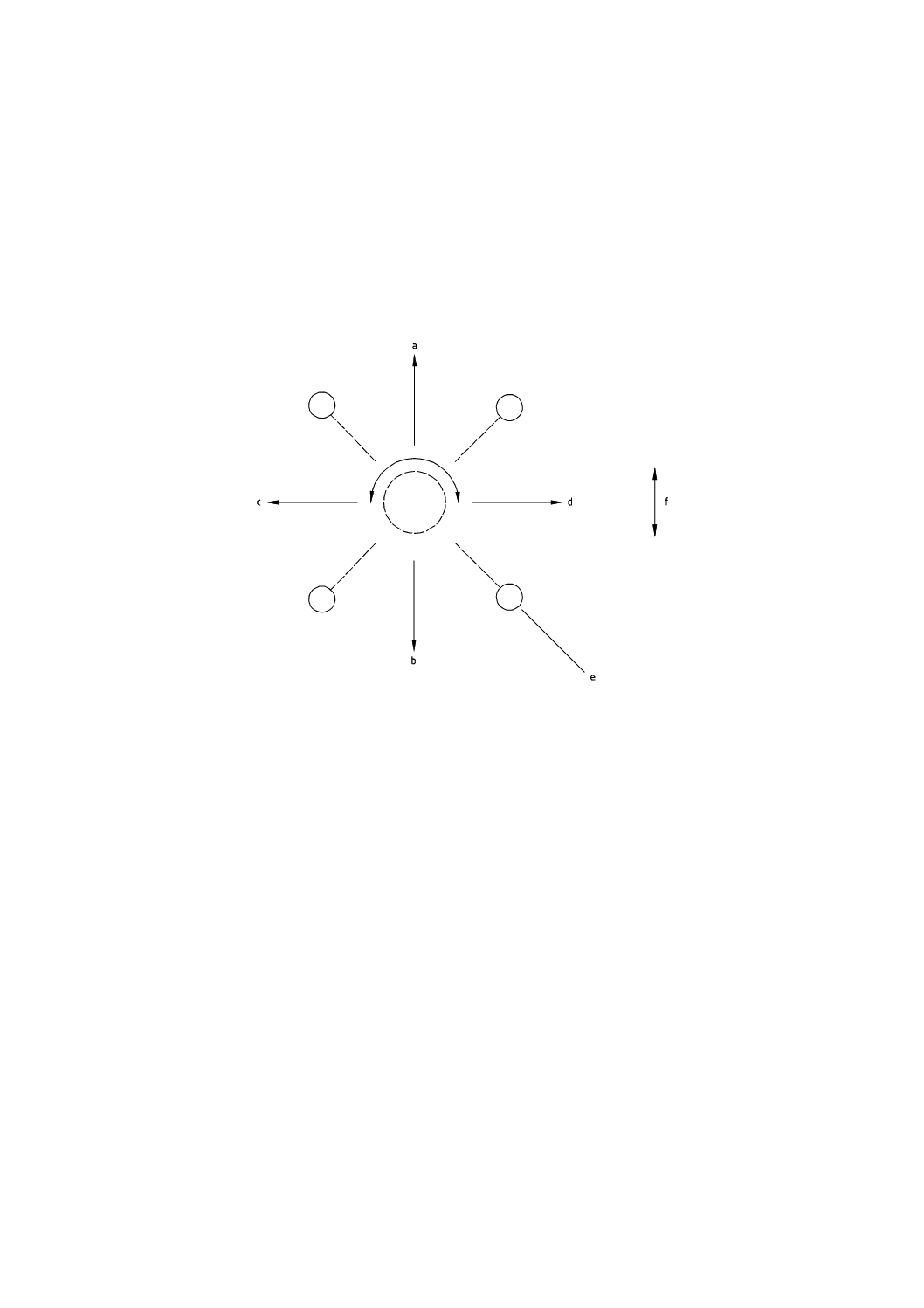
多機能操縦装置の基本動作は,次の操作(又はその組合せ)からなる。
− 前後方向
− 左右方向
− 回転/旋回方向(例えば,変速段の上下への選択)
− 上下方向(上げ/下げ)
運転機能の組み合わせた動き(例えば,前方左又は前方右,後方左又は後方右)は差し支えない(図1
参照)。
符号
a
前方
b
後方
c
左方
d
右方
e
組合せ操作
f
上方/下方(上げ/下げ)
図1−多機能操縦装置の基本機能
5.2.3
多機能操縦装置の変換に対する機械の応答
多機能操縦装置の動作を,他の主要な機能(附属書A及び附属書B参照)の機械応答に変換するときは,
操縦機構のラベル又は視覚的表示装置によって,運転員に操縦装置の動作と機械との応答について元の状
態及び変換した状態について示されていれば差し支えない。
5.2.4
多機能操縦装置の位置に付加された操縦装置
多機能操縦装置の箇所にノブ又はスイッチのような追加の操縦機構を,主要操縦装置又は補助操作装置
を作動させるために付加してもよい。ただし,付加操縦機構の数は,4種類を超えないのがよい(例えば,
グラブを右方/保持/左方,走行を前方/中立/後方,車軸の揺動をロック/ロック解除及びスタビライザの上げ
/保持/下げ)。
付加操縦機構の操作部分及び応答は,操縦機構のラベル又は視覚的表示装置によって表示しなければな
らない。
6
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
指先で操作を行うけん盤式又は接触式は,この規格では適用しない。
6
操作力
6.1
通常の運転で,表1に示す最大操作力を超えてはならない。ただし,緊急非常時用装置は,これを
超えてもよい。
6.2
最小操作力は,操縦装置の意図しない作動を回避できるものでなければならない(表1及び5.1.6参
照)。
6.3
表1の値は,ブレーキ及びかじ取りシステムには適用しない。これらに対しては,JIS A 8340-1,JIS
A 8314及びJIS A 8325に規定されている。
6.4
操縦装置の強度の下限値は,表1による通常操作力の5倍以上でなければならない。
6.5
操作力の方向は,運転操作中の運転員の位置から見た方向を示す。
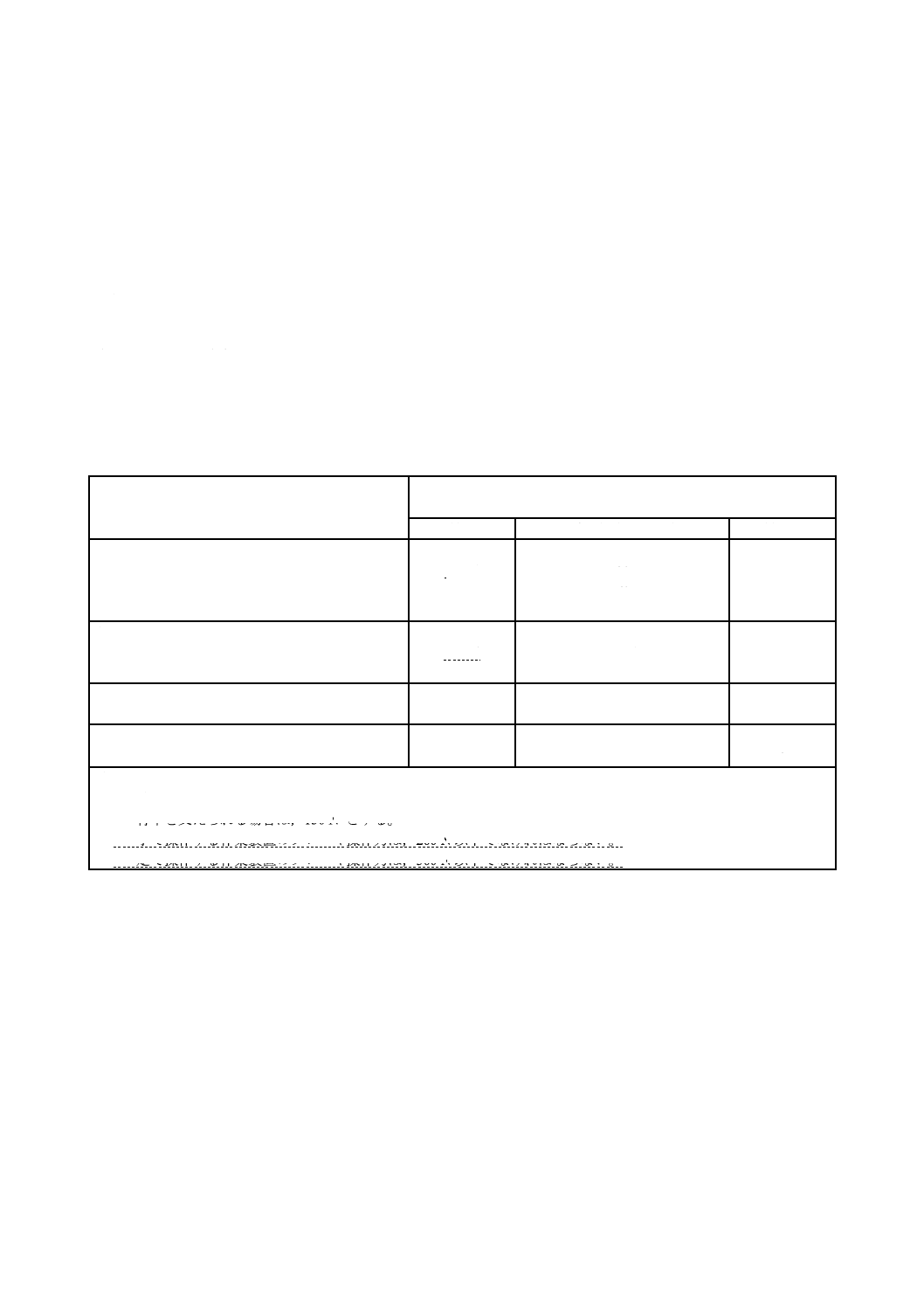
表1−操作力
操作手段
操作力
N
最大
通常(頻繁な操作)
最小a)
手
レバー,前後方向
レバー,左右方向
駐車ブレーキレバー,引上げ方向
230c)
100
400
80
60
60
20
15
15
足
ペダル
センタピボットペダル
450d)
230
120b)
50
30
30
つま先
ペダル
90
50
12
指先
レバー又はスイッチ
20
10
2
注a) 参考情報。操作力は,操作レバーの動作範囲で変化し,表示の値は,動作の範囲で特にデテント位置にはまる
前での適用を意図している。
b) 背中を支えられる場合は,150 N とする。
c) 手で操作する作業装置のブレーキ操作力は,200 N以下でなければならない。
d) 足で操作する作業装置のブレーキ操作力は,300 N以下でなければならない。
7
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
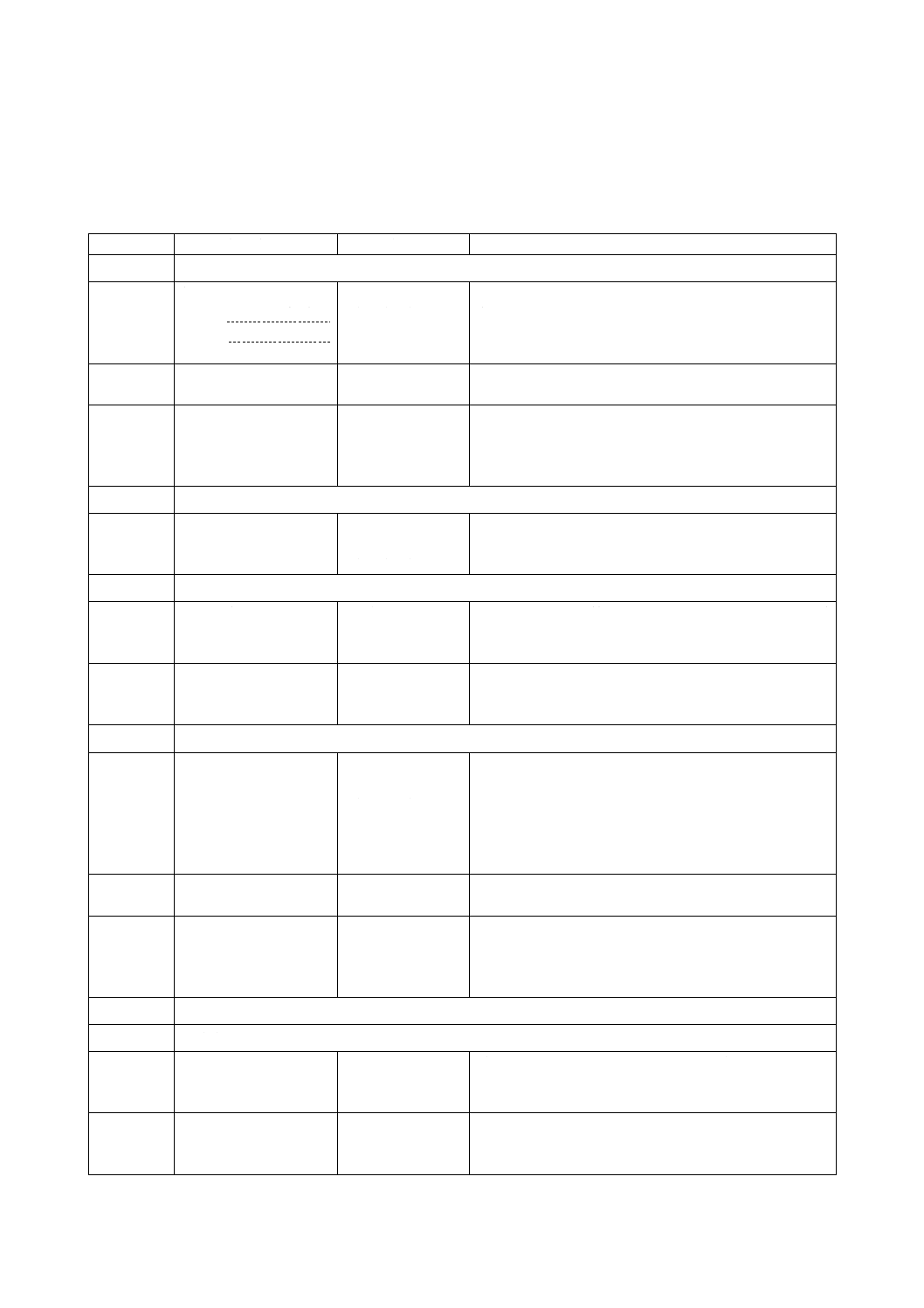
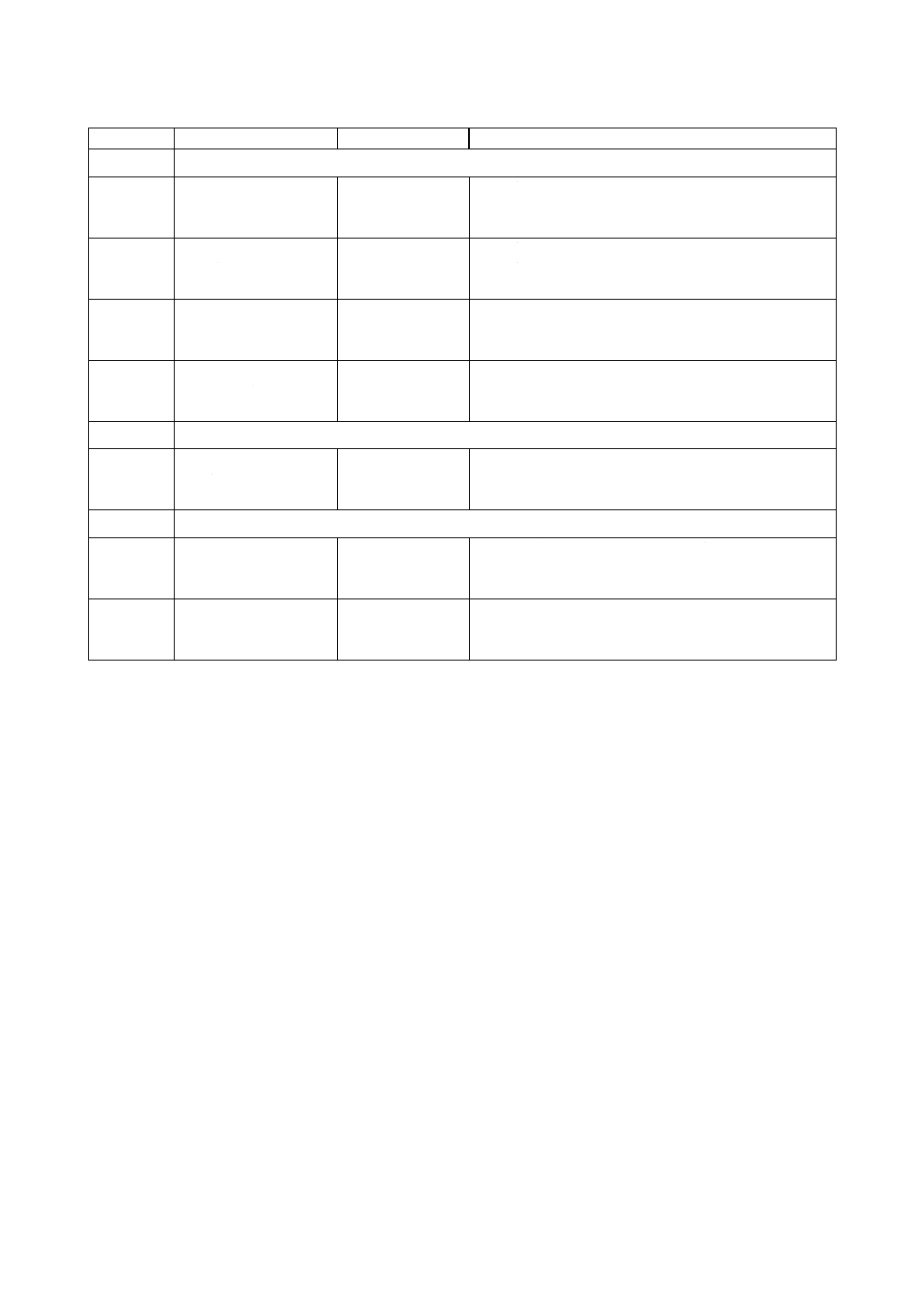
附属書A(規定)土工機械−本体の主要操縦装置
操縦装置
位置
操作方法要求事項
A.1
操向
A.1.1
操向ホイール
注記 操向用回転式レ
バーを用いるも
のがある。
運転員の前方
(4.1参照)
時計方向に回すと右に曲がり,反時計方向に回すと左に
曲がる。
A.1.2
手操作式
1本レバー
4.1参照
レバーを左方に動かすと左に曲がり,右方に動かすと右
に曲がる。
A.1.3
手操作式
2本レバー
4.1参照
左レバーを前方及び/又は右レバーを後方に動かすと右
に曲がる。
左レバーを後方及び/又は右レバーを前方に動かすと左
に曲がる。
A.2
クラッチ又はインチングペダル
足操作式
運転員の左足の届
くところ
(4.1参照)
ペダルを前方及び/又は下方に踏んでクラッチを切る。
A.3
シフト
A.3.1
手操作式
4.1参照
シフトパターンは簡明,かつ,明白に表示されなければ
ならない。特に中立位置が,はっきりと識別でき容易に
選択できるものとする。
A.3.2
指操作式
運転員の手の届く
ところ
(4.1参照)
上/右のボタンを押すと変速段が高速側となり,下/左
のボタンを押すと低速側に切り替わる。
A.4
アクセル:エンジン及び/又は走行速度
A.4.1
足操作式
− 足操作式デセラレ
ータ
運転員の右足の届
くところ
(4.1参照)
運転員の右足の届
くところ
(4.1参照)
加速:前方及び/又は下方に動かして増速する。
減速:後方及び/又は上方に動かして減速する。
前方及び/又は下方に動かして減速する。
A.4.2
手操作式レバー操作
4.1参照
加速:前方及び/又は下方に動かして増速する。
減速:後方及び/又は上方に動かして減速する。
A.4.3
指操作式
運転員の手の届く
ところ
(4.1参照)
加速:加速ボタン/スイッチを押して増速する。
減速:減速ボタン/スイッチを押して減速する。
加速:レバー,ノブ,ダイアルを右へ回して増速する。
減速:レバー,ノブ,ダイアルを左へ回して減速する。
A.5
走行
A.5.1
前後進切換操作,変速機能とは切り離されたもの
A.5.1.1
手操作式
運転員の手の届く
ところ
(4.1参照)
前方又は上方若しくは右方に動かすと前進,後方又は下
方若しくは左方に動かすと後進する。
A.5.1.2
指操作式
運転員の手の届く
ところ
(4.1参照)
上のボタンを押すと前進,下のボタンを押すと後進する。
8
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
操縦装置
位置
操作方法要求事項
A.5.2
走行速度,方向操作組合せ式:無段変速組合せ
A.5.2.1
手操作式
運転員に手の届く
ところ
(4.1参照)
中立位置から前方及び/又は上方に動かすと前進増速,
上記と反対方向に動かすと反対方向に作動する。
A.5.2.2
足操作式
1ペダル式
運転員の右足の届
くところ
(4.1参照)
ペダルは足の下に支点があり中立位置で止まる。
ペダル前部を前方及び/又は下方に動かすと前進増速す
る。
ペダル後部を下方に動かすと後進増速する。
A.5.2.3
足操作式
2ペダル式
運転員の足の届く
ところ
(4.1参照)
右ペダルを前方及び/又は下方に動かすと前進増速す
る。
左ペダルを前方及び/又は下方に動かすと後進増速す
る。
A.5.3
走行速度,前後進切換及び操向:無段変速組合せ式
A.5.3.1
手操作式
1本レバー
運転員の手の届く
ところ
(4.1参照)
レバーを前方に動かすと前進増速する。
レバーを後方に動かすと後進増速する。
レバーを左方に動かすと左に曲がり右方に動かすと右に
曲がる。
注記
レバーを前方に動かすと前進,レバーを後方に動
かすと後進,レバーを左方に動かすと左に曲が
り,右方に動かすと右に曲がり,増速ボタン又は
スイッチを動かすと増速,減速ボタン又はスイッ
チを動かすと減速するものがある。
A.5.3.2
手操作式
2本レバー
運転員の手の届く
ところ
(4.1参照)
双方のレバーを前方に動かすと前進増速する。
双方のレバーを後方に動かすと後進増速する。
左レバーを前方に,右レバーを後方に動かすと右に曲が
る。
左レバーを後方に,右レバーを前方に動かすと左に曲が
る。
A.5.3.3
足操作式
2ペダル式
運転員前方で足の
届くところ
(4.1参照)
ペダルは足の下にピボットがあり,中立位置で止まる。
双方のペダルの前方を下方に動かすと前進増速する。
双方のペダルの後方を下方に動かすと後進増速する。
左ペダルの前部を下に,右ペダルの後部を下方に動かす
と右に曲がる。
右ペダルの前部を下に,左ペダルの後部を下方に動かす
と左に曲がる。
A.6
ブレーキ
A.6.1
常用ブレーキ
A.6.1.1
足操作式
4.1参照
操作方向は,通常,前方及び/又は下方に動かすとブレ
ーキが効く。
A.6.1.2
手操作式
4.1参照
引っ張ると作動することが望ましい。
A.6.2
駐車ブレーキ
A.6.2.1
足操作式
4.1参照
操作方向は,通常,前方及び/又は下方に動かすとブレ
ーキが効く。
A.6.2.2
手操作式
4.1参照
引っ張ると作動することが望ましい。
9
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
操縦装置
位置
操作方法要求事項
A.6.3
かじ取り,ブレーキ操作組合せ式
A.6.3.1
足操作式
2ペダルオーバラッピ
ング式
4.1参照
右ペダルを下方に動かすと右に曲がる。
左ペダルを下方に動かすと左に曲がる。
オーバラップペダルを下方に動かすと止まる。
A.6.3.2
足操作式
3ペダル式
4.1参照
右ペダルを下方に動かすと右に曲がる。
左ペダルを下方に動かすと左に曲がる。
中央ペダルを下方に動かすと止まる。
A.6.3.3
手又は指操作式
運転員の手の届く
ところ
(4.1参照)
右レバーを後方に動かすと右に曲がる。
左レバーを後方に動かすと左に曲がる。
両方のレバーを引くと止まる。
A.6.4
旋回/回転ブレーキ
− 足操作式
運転員の足の届く
ところ
(4.1参照)
下方に動かすとブレーキが効く。
A.7
旋回又は揺動動作
A.7.1
手操作式
回転レバー式
運転員の手の届く
ところ
(4.1参照)
時計方向に動かすと時計方向に旋回,回転する。
A.7.2
上部構造物の旋回又は揺動
A.7.2.1
手操作式
1本レバー式
運転員の左手の届
くところ
(4.1参照)
レバーを前方に動かすと時計方向に旋回する。
A.7.2.2
手操作式
複合レバー式
運転員の左手の届
くところ
(4.1参照)
レバーを右方に動かすと時計方向に旋回する。
10
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
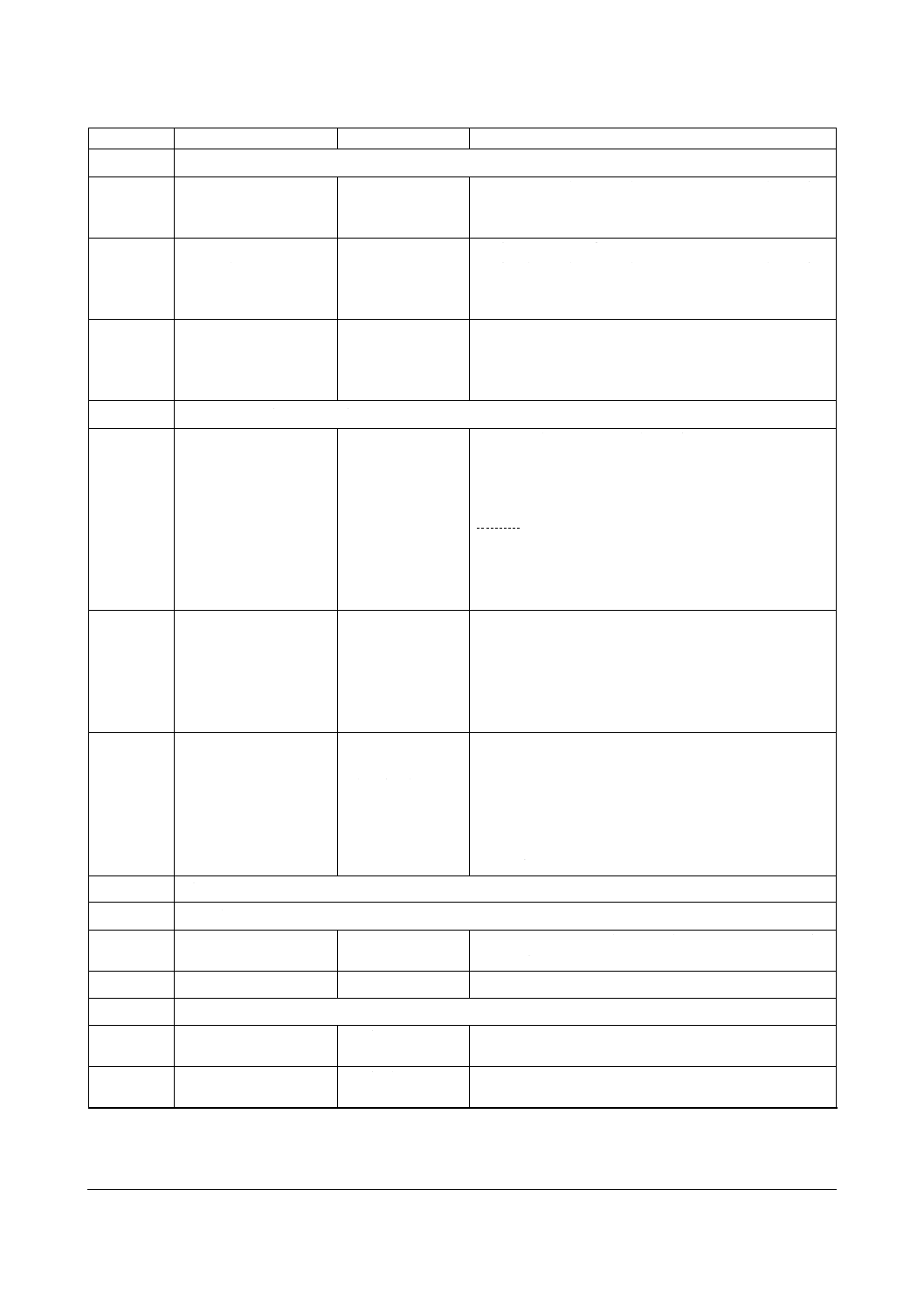
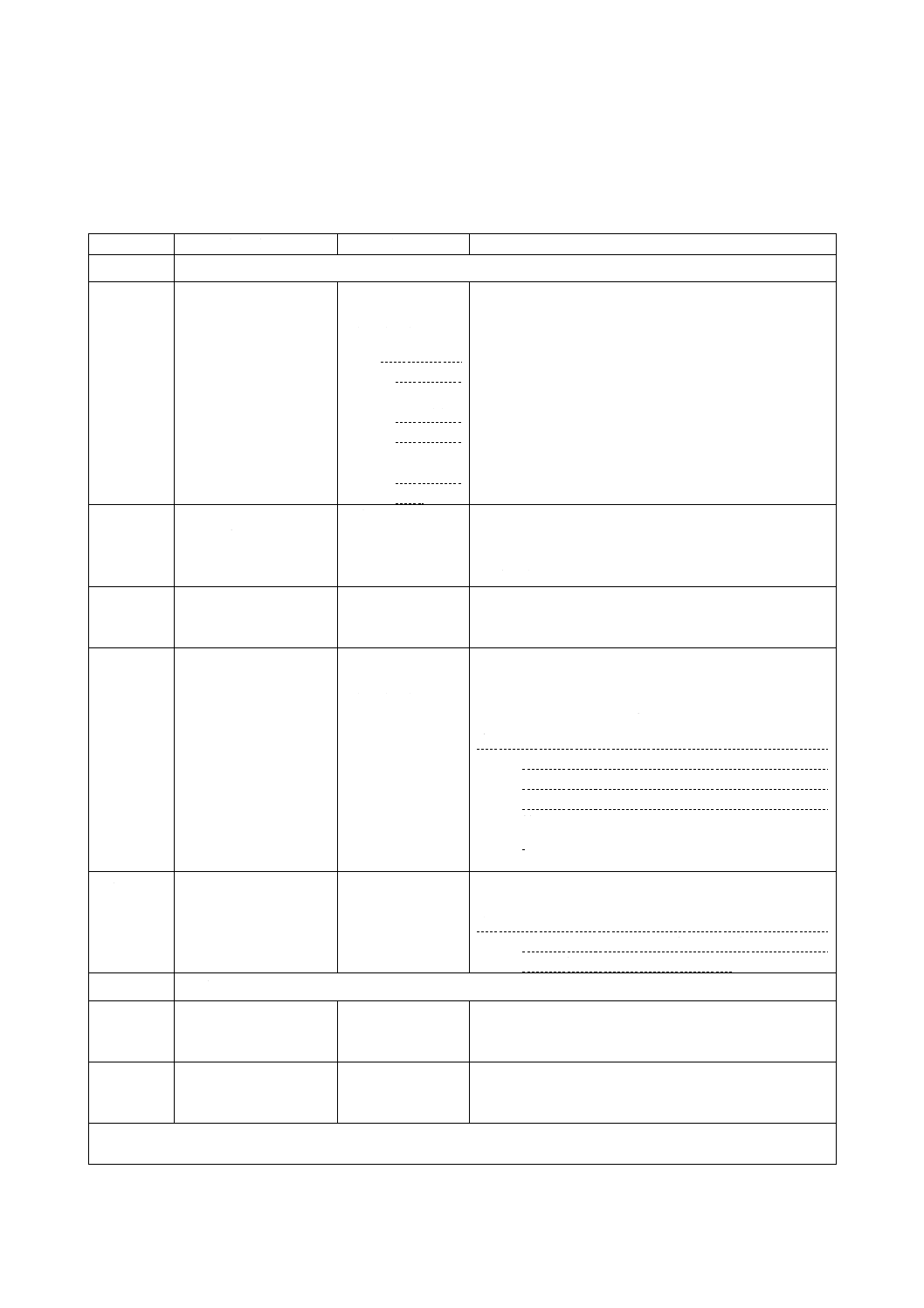
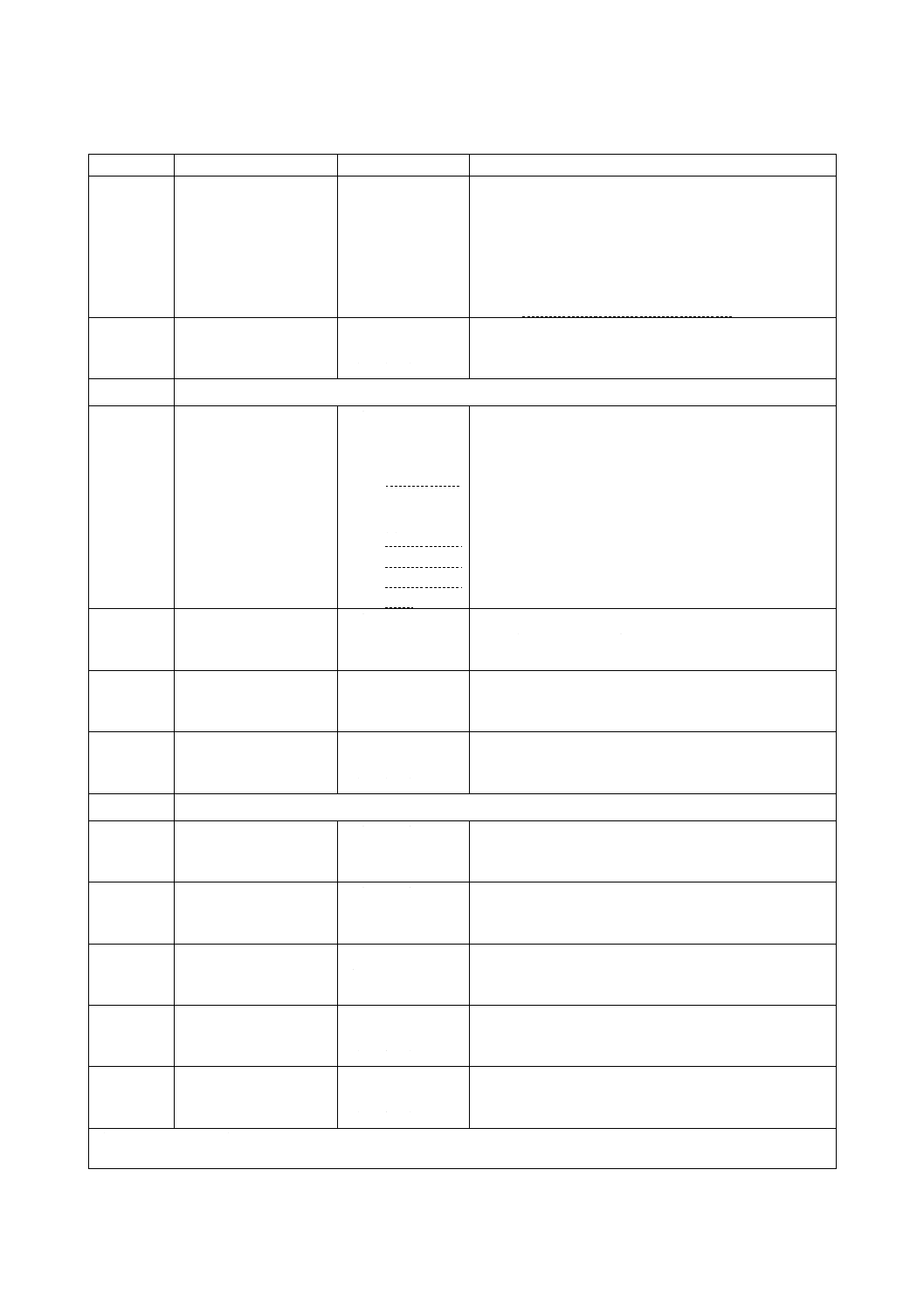
附属書B(規定)土工機械−作業装置の主要操縦装置
操縦装置
位置
操作方法要求事項a)
B.1
上げ及び下げ
B.1.1
手操作式
運転員の右手の届
くところ
(4.1参照)
注記
グレーダ
などの手
操作で,左
手の届く
ところに
位置する
ものがあ
る。
レバーを後方に動かすと作業装置が上がり,前方に動か
すと下がる。
B.1.2
足操作式
1ペダル式
運転員の足の届く
ところ
(4.1参照)
ペダルは運転員の足の下に支点があり,中立位置で停止
する。
ペダル後部を下方に動かすと上がる。
ペダル前部を下方に動かすと下がる。
B.1.3
足操作式
2ペダル式
運転員の足の届く
ところ
(4.1参照)
右ペダルを下方に動かすと上がる。
左ペダルを下方に動かすと下がる。
B.1.4
ダンパ(重ダンプトラッ
ク及び不整地運搬車)
荷台の上げ/下げ
手操作式
運転員の手の届く
ところ
(4.1参照)
レバーを後方又は上方に動かすと荷台が上がり,前方又
は下方に動かすと下がる。
前方にダンプする形式のダンパでは,レバーを前方に動
かすと荷台が上がり,後方に動かすと下がる。
注記
運転席の前方に荷台がある小型の不整地運搬車
(コンパクトダンパ)の場合,操縦装置の中立位
置に対する動きが,ダンプレバーを前方に動かす
と荷台が上がり,後方に動かすと荷台が下がる方
法としているものがある。
また,座席が反転式の場合,着座する方向によ
りレバーの動きが逆になるものがある。
B.1.5
リッパ
上げ/下げ
手
指操作式
運転員の右手の届
くところ
(4.1参照)
レバーを後方又は左方に動かすと作業装置が上がり,前
方又は右方に動かすと下がる。
注記
レバーを左に動かすと上がり,右に動かすと下が
るものがある。また,ノブの上部を押すと上がり,
下部を押すと下がるものがある。
B.2
伸び/縮み
B.2.1
手操作式
運転員の左手の届
くところ
(4.1参照)
レバーを前方又は左方に動かすと作業装置は伸びる。
レバーを後方又は右方に動かすと作業装置は縮む。
B.2.2
指操作式
運転員の左手の届
くところ
(4.1参照)
上方又は左方のボタンを押すと作業装置が伸びる。
下方又は右方のボタンを押すと作業装置が縮む。
注a) 土工機械には多くの形式があり,作業装置の作動方向はその地上からの高さとアタッチメントの位置によって
変わることがある。したがって,操作方法の定義は,中間の高さのものを用いることとする。
11
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
操縦装置
位置
操作方法要求事項a)
B.2.3
足操作式
1ペダル式
運転員の右足の届
くところ
(4.1参照)
ペダルは運転員の足の下に支点があり,中立位置で停止
する。
ペダル前部を下方に動かすと作業装置は伸びる。
ペダル後部を下方に動かすと作業装置は縮む。
注記 横ふみ(踏)式ペダルで,ペダル右方を下方に動
かすと作業装置は伸び,ペダル左方を下方に動か
すと作業装置は縮むものがある。
B.2.4
足操作式
2ペダル式
運転員の足の届く
ところ
(4.1参照)
右のペダルを下方に動かすと作業装置は伸びる。
左のペダルを下方に動かすと作業装置は縮む。
B.3
前後運動
B.3.1
手操作式
運転員の左手の届
くところ
(4.1参照)
注記 グレーダな
どの手操作
で,右手の
届くところ
に位置する
ものがあ
る。
レバーを後方に動かすと後方向に動く。
レバーを前方に動かすと前方向に動く。
B.3.2
指操作式
運転員の左手の届
くところ
(4.1参照)
上方/左方のボタンを押すと前方に動く。
下方/右方のボタンを押すと後方に動く。
B.3.3
足操作式
1ペダル式
運転員の左足の届
くところ
(4.1参照)
運転員の足の下に支点があり中立位置で停止する。
ペダル前部を下方に動かすと前方に動く。
ペダル後部を下方に動かすと後方に動く。
B.3.4
足操作式
2ペダル式
運転員の足の届く
ところ
(4.1参照)
右ペダルを下方に動かすと前方に動く。
左ペダルを下方に動かすと後方に動く。
B.4
バケット操作(3.3参照)
B.4.1
手操作式
1レバー式
運転員の右手の届
くところ
(4.1参照)
レバーを後方に動かすと作用側に動く。
B.4.2
手操作式
複合レバー式
運転員の右手の届
くところ
(4.1参照)
レバーを左に動かすと作用側に動く。
B.4.3
指操作式
運転員の右手の届
くところ
(4.1参照)
レバーを後方に動かすと作用側に動く。
B.4.4
足操作式
1ペダル式
運転員の右足の届
くところ
(4.1参照)
運転員の足の下に支点があり中立位置で停止する。
ペダル後部を下方に動かすと作用側に動く。
B.4.5
足操作式
2ペダル式
運転員の右足の届
くところ
(4.1参照)
右/左ペダルを下方に動かすと作用側に動く。
注a) 土工機械には多くの形式があり,作業装置の作動方向はその地上からの高さとアタッチメントの位置によって
変わることがある。したがって,操作方法の定義は,中間の高さのものを用いることとする。
12
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
操縦装置
位置
操作方法要求事項a)
B.4.6
足操作式
関節式アタッチメン
トの1ペダル操作
運転員の右足の届
くところ
(4.1参照)
ペダルは運転員の足の下に支点があり,中立位置で停止
する。
ペダルの前方/右方を下方に動かすと時計回りに回転す
る。ペダルの後方/左方を下方に動かすと反時計回りに
回転する。
B.5
回転又は揺動操作
B.5.1
手操作式
1レバー式
運転員の左手の届
くところ
(4.1参照)
注記
グレーダ
などの手
操作で,右
手の届く
ところに
位置する
ものがあ
る。
レバーを前方又は右方に動かすと時計回りに回転する。
注記
トラクタドーザのアングルドーザなどの手操作
で,レバーが右手の届くところに位置するもので
は,レバーを前に動かすと反時計方向に回転する
ものがある。
B.5.2
手操作式
複合レバー式
運転員の左手の届
くところ
(4.1参照)
レバーを右方に動かすと時計回りに回転する。
レバーを左方に動かすと反時計回りに回転する。
B.5.3
手操作式
回転レバー式
運転員の手の届く
ところ
(4.1参照)
時計方向に廻すと時計回りに回転する。
B.5.4
指操作式
運転員の左手の届
くところ
右のボタンを押すと時計回りに回転する。
B.5.5
足操作式
1ペダル式
運転員の左足の届
くところ
(4.1参照)
注記
油圧ショ
ベルのブ
ームスイ
ング/オ
フセット
操作ペダ
ルは運転
員の右足
の届くと
ころにペ
ダルの位
置するも
のがある。
運転員の足の下に支点があり中立位置で停止する。
ペダル前部を下方に動かすと時計方向に回転する。
ペダル後部を下方に動かすと反時計方向に回転する。
注記
油圧ショベルのブームスイング/オフセット操
作ペダルで,運転員の右足の届くところにペダル
を位置し,横ふみ(踏)式では,ペダル右部を下
方に動かすとブームが時計方向に回転し,ペダル
左部を下方に動かすと反時計方向に回転するも
のがある。
また,縦ふみ(踏)式では,同じく運転員の右
足の届くところに位置し,その位置がブームフー
ト中央より左にある場合,ペダル前部を下方に動
かすと,ブームが時計方向に回転し,ペダル後部
を下方に動かすと反時計方向に回転するものが
ある。ミニショベルでも特に小形のものでペダル
位置がブームフート中央より右にある場合は,逆
方向に回転するものがある。
B.5.6
足操作式
2ペダル式
運転員の左足の届
くところ
(4.1参照)
右ペダルを前方及び/又は下方に動かすと時計方向に回
転する。
左ペダルを前方及び/又は下方に動かすと反時計方向に
回転する。
注a) 土工機械には多くの形式があり,作業装置の作動方向はその地上からの高さとアタッチメントの位置によって
変わることがある。したがって,操作方法の定義は,中間の高さのものを用いることとする。
13
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
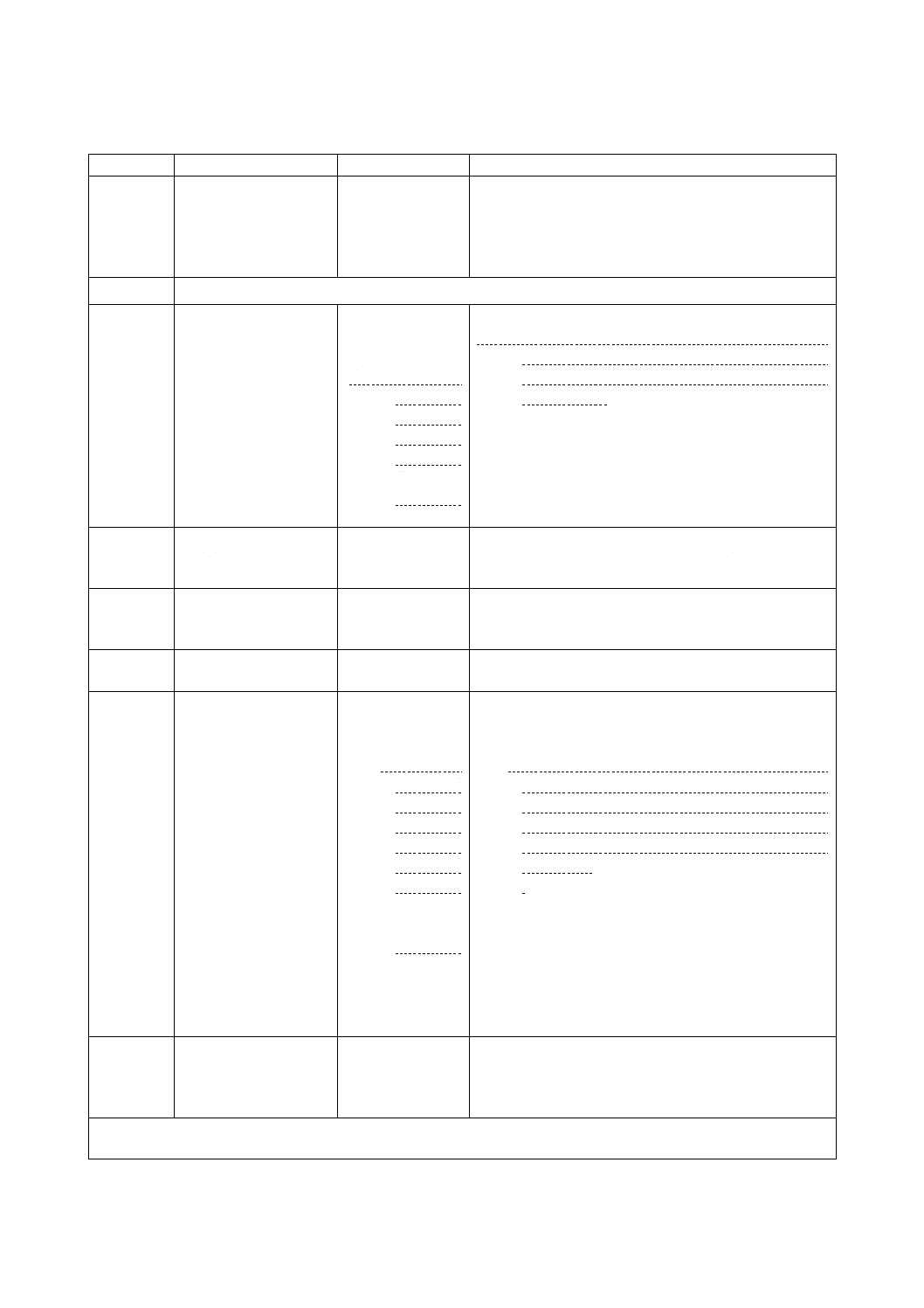
附属書JA(参考)JISと対応する国際規格との対比表
JIS A 8919 : 2007 土工機械−操縦装置
ISO 10968 : 2004,Earth-moving machinery−Operatorʼs controls
(Ⅰ)JISの規定
(Ⅱ)
国際規
格番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ)JISと国際規格との技
術的差異の理由及び今後の
対策
箇条番号及び名称
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲
1
一致
2 引用規格
3 用語及び定義
3
一致
4操縦装置の配置
4.4ペダルの滑り
止め
ペダルの滑り
止めを規定
4
4.4
4.4以外はJISに同じ
操作のために足を滑らせる
必要のあるペダル類につい
てのJISで許容事項を欠く。
変更
対応国際規格にない操作のた
めに足を滑らせる必要のある
ペダル類についての許容事項
を追加。
今後ISO 10968にその旨の
追補を提案する。
5操縦装置の動き
5.1 通則
5.1.5
通則を規定
制御信号が電
気的に伝えら
れるときの規
定及び推奨
5
5.1
5.1.5
5.1.5以外はJISに同じ
JISで指針として推奨の
ISO/FDIS 15998への適合を
規定
変更
対応国際規格で適合を規定の
ISO/FDIS 15998を,指針として
推奨
審議中のISO/FDIS 15998
を規定ではなく指針として
推奨する文書とするよう投
票などを通じて働きかける
とともに,ISO 10968のそ
の旨の追補を提案する。
6 操作力
表1操作力
6
Table 1
表1の脚注以外はJISに同じ
JISにある作業装置のブレー
キ操作力の脚注を欠く
追加
国内法令(車両系建設機械構造
規格)に規定の作業装置のブレ
ーキ操作力を脚注で規定
現状ISO規格は,昔の技術
の反映で,最新の技術に比
して過大なので,今後ISO
規格の改訂を働きかける。
1
3
A
8
9
1
9
:
0
0
0
0
14
A 8919:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ)JISの規定
(Ⅱ)
国際規
格番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ)JISと国際規格との技術的
差異の理由及び今後の対策
箇条番号及び
名称
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
附属書A(規
定)
Annex A
(Normative)
一致
附属書B(規
定)
Annex B
(Normative)
一致
JISと国際規格との対応の程度の全体評価:ISO 10968:2004 (MOD)
関連する法規
昭和47年12月4日付け 労働省告示第150号 車両系建設機械構造規格
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 一致……………… 技術的差異がない。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
1
4
A
8
9
1
9
:
0
0
0
0