3
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
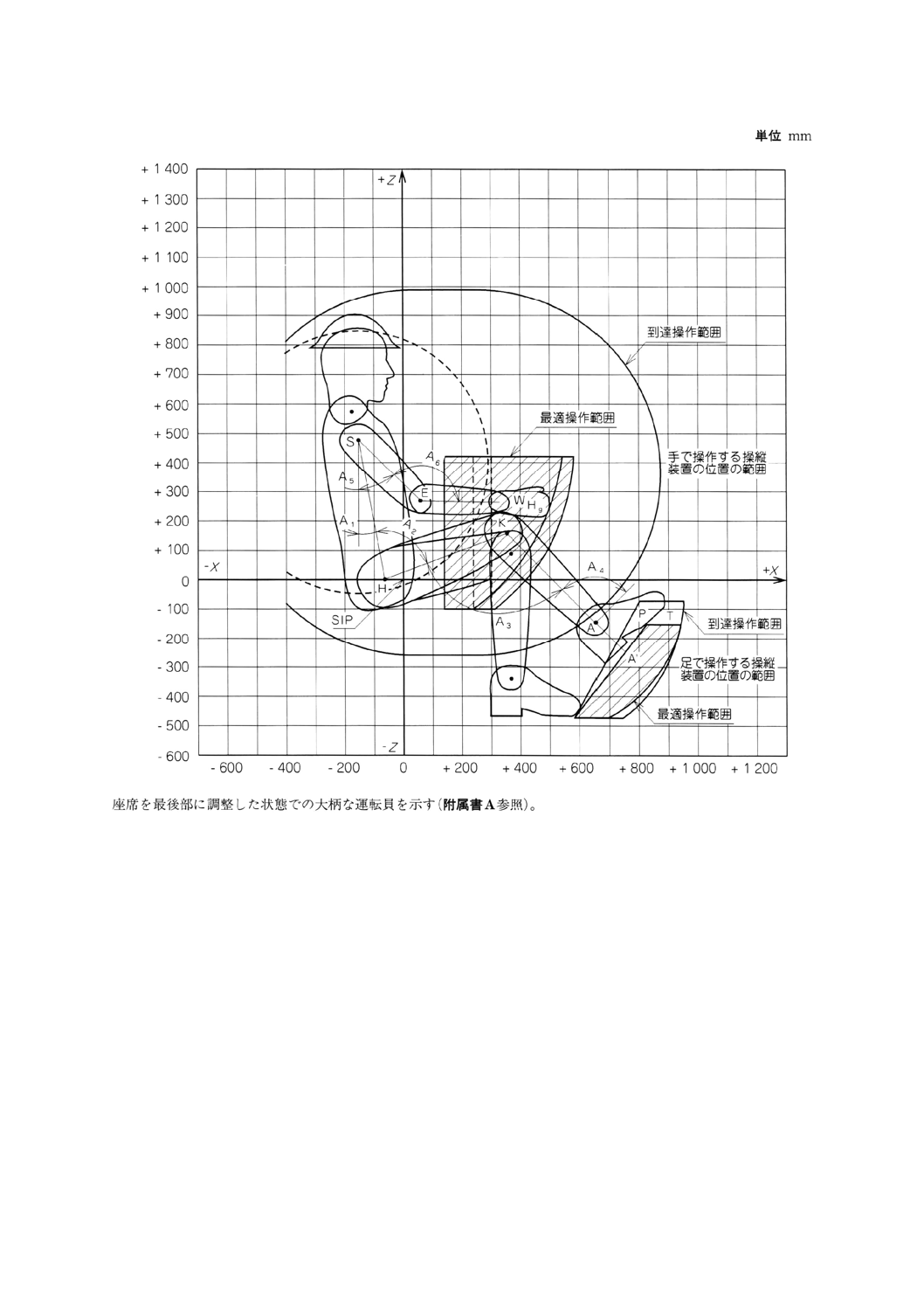
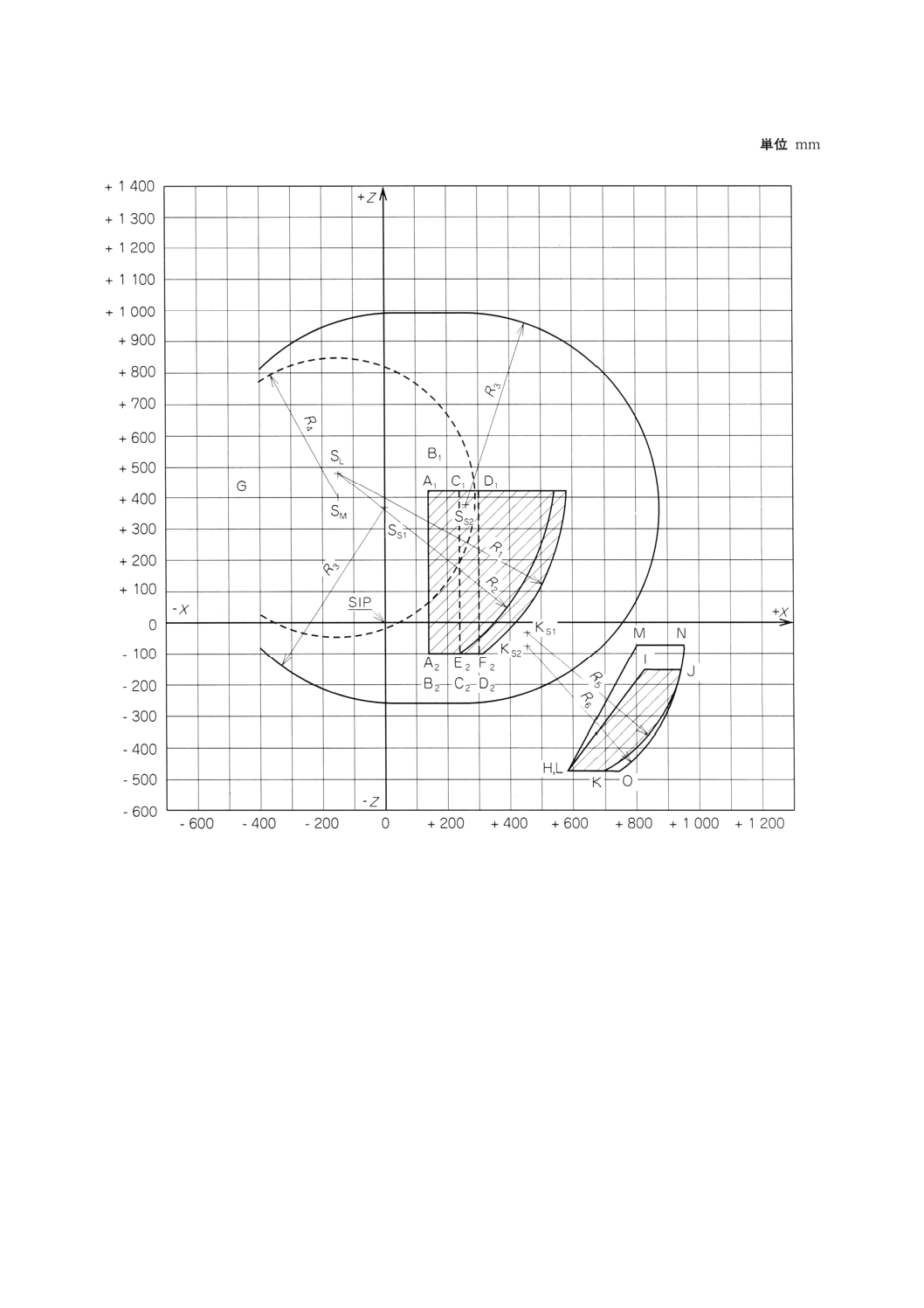
図1 最適操作範囲及び到達操作範囲−側面図
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化に基づいて,日本工業標準調査会の審議を経て,通商産業大臣が制定した日本
工業規格である。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案出願に抵触する可能性があることに注意を喚起する。主務大臣及び日本工業標準調査会は,この
ような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新案出願に
かかわる確認について,責任はもたない。
JIS A 8407には,次に示す附属書がある。
附属書A(規定) 操縦装置の位値の範囲を決定するために用いられる特定の条件
附属書B(規定) 操縦装置の位置の範囲を決定する座標の概要
附属書1(参考) JISと対応する国際規格との対比表
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
A 8407 : 2000
(ISO 6682 : 1986. Amd. 1 : 1989)
土工機械−操縦操置の操作範囲及び位置
Earth-moving machinery−Zones of comfort and reach for controls
序文 この規格は,1986年第2版として発行されたISO 6682, Earth-moving machinery−Zones of comfort and
reach for controls及びAmendment1 : 1989を翻訳し,技術的内容を変更することなく作成した日本工業規格
である。ただし,追補 (Amendment) については,編集し,一体とした。
なお,この規格で点線の下線を施してある箇所は,原国際規格にはない事項である。
1. 適用範囲 この規格は,大柄及び小柄な運転員を含めた一般の運転員が着座した状態における操縦装
置の操作範囲及び位置について規定し,土工機械の運転室の操縦装置を設計する際に指針として用いる。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を示す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 6682 : 1986, Earth-moving machinery−Zones of comfort and reach for controls及びAmendment
1 : 1989 (MOD)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む)を適用する。
JIS A 8411-1 土工機械−寸法及び記号の定義−第1部:本体
備考 ISO 6746-1 : 1987, Earth-moving machinery−Definitions of dimensions and symbols−Part 1 : Base
machineが,この規格と一致している。
ISO 3411 : 1995, Earth-moving machinery−Human physical dimensions of operators and minimum operator
space envelope
参考 JIS A 8315(土工機械−運転員の身体寸法及び運転員周囲の最小空間)が翻訳規格として近
く発行される予定である。
ISO 5353 : 1995, Earth-moving machinery, and tractors and machinery for agriculture and forestry−Seat index
point
参考 JIS A 8318[土工機械−座席基準点 (SIP) ]が翻訳規格として近く発行される予定である。
3. 定義 この規格で用いる主な用語の定義は,次のとおりとする。
3.1
SIP ISO 5353に規定される座席基準点(標準の座席調整位置に固定)。
3.2
操縦装置の操作範囲 (control displacement) 操縦装置の操作範囲内における動きの量。
3.3
操縦装置の位置 (control location) SIPから測られた操縦装置のストローク量を含んだ位置。
3.4
主要操縦装置 (primary controls) 頻繁に,又は連続して使用される操縦装置で,次のようなもの。
2
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 機械の操縦 (machine controls) 変速機,ブレーキ,かじ取り,エンジン回転速度など。
b) 作業機の操作 (working tool controls) ブレード操作,バケット操作,リッパ操作など。
3.5
補助操作装置 (secondary controls) 使用頻度の少ない操作装置で,ライト,ウインドスクリーンワ
イパ,スタータ,ヒータ,エアコンディショナなどを操作するもの。
3.6
最適操作範囲 (zones of comfort) 手又は足で操作される主要操縦装置の位置の範囲。大柄及び小柄
運転員の両者が,楽に操作できる範囲。
3.7
到達操作範囲 (zones of reach) 手又は足で操作される補助操縦装置の位置の範囲。大柄及び小柄運
転員の両者が,着座した位置から操作位置に届かなければならない範囲。ただし,運転員が身体を回した
り,前方又は左右に傾けてもよい。
3.8
XYZ座標 (XYZ coordinate system) 操作範囲の位置を定めるための座標系。
a) SIPを原点とする。
b) X軸 (X-axis) 前後方向で,SIPの前方を+とする。
c) Y軸 (Y-axis) 左右方向で,SIPの右方を+とする。
d) Z軸 (Z-axis) 垂直方向で,SIPの上方を+とする。
JIS A 8411-1を参照する。
3.9
屈曲 (flexion) 身体の部分間の角度を変化させる動き。
3.10 内転 (adduction) 屈曲平面に直角な平面内で,身体の中心平面(XZ平面)に向かうか通り過ぎる
方向の動き。
3.11 外転 (abduction) 屈曲平面に直角な平面内で,身体の中心平面(XZ平面)から離れる方向の動き。
3.12 捻転 (circumduction) 身体の軸の周りに円すい(錐)形に回す動き。
参考 主要操縦装置の位置は,最適範囲に入らない場合がある。このような場合であっても,少なく
とも到達範囲に入れるのを検討する必要がある。また,足で操作する操縦装置の場合,最適範
囲又は到達範囲に対して,後方(運転員に近い側)になるのはやむを得ないことがあるが,前
方(運転員から遠い方)の位置となるのは避けるのを検討する必要がある。
4. 操縦装置の位置の範囲
4.1
操縦装置の位置の範囲は,SIPを基準として決定する。
4.2
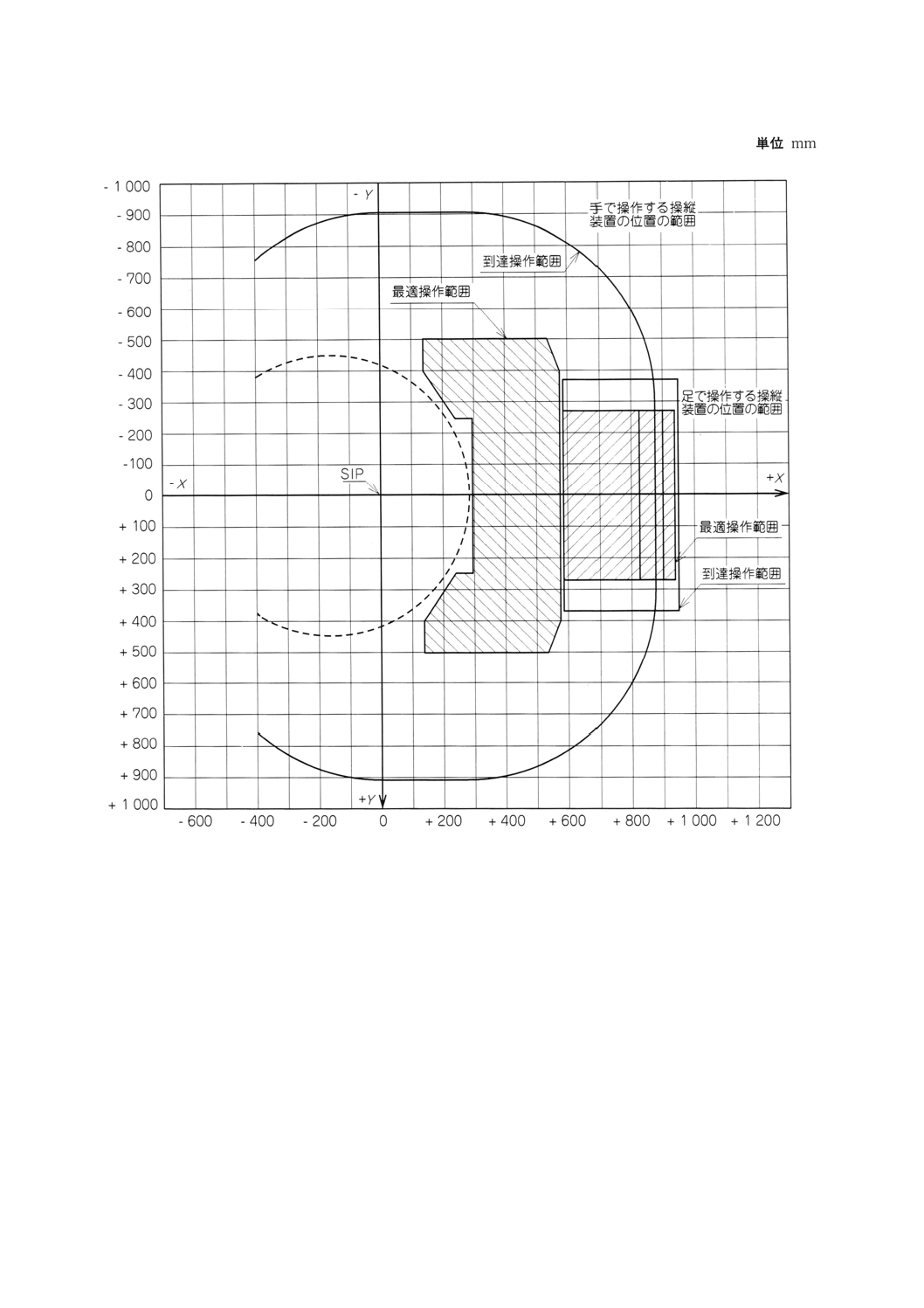
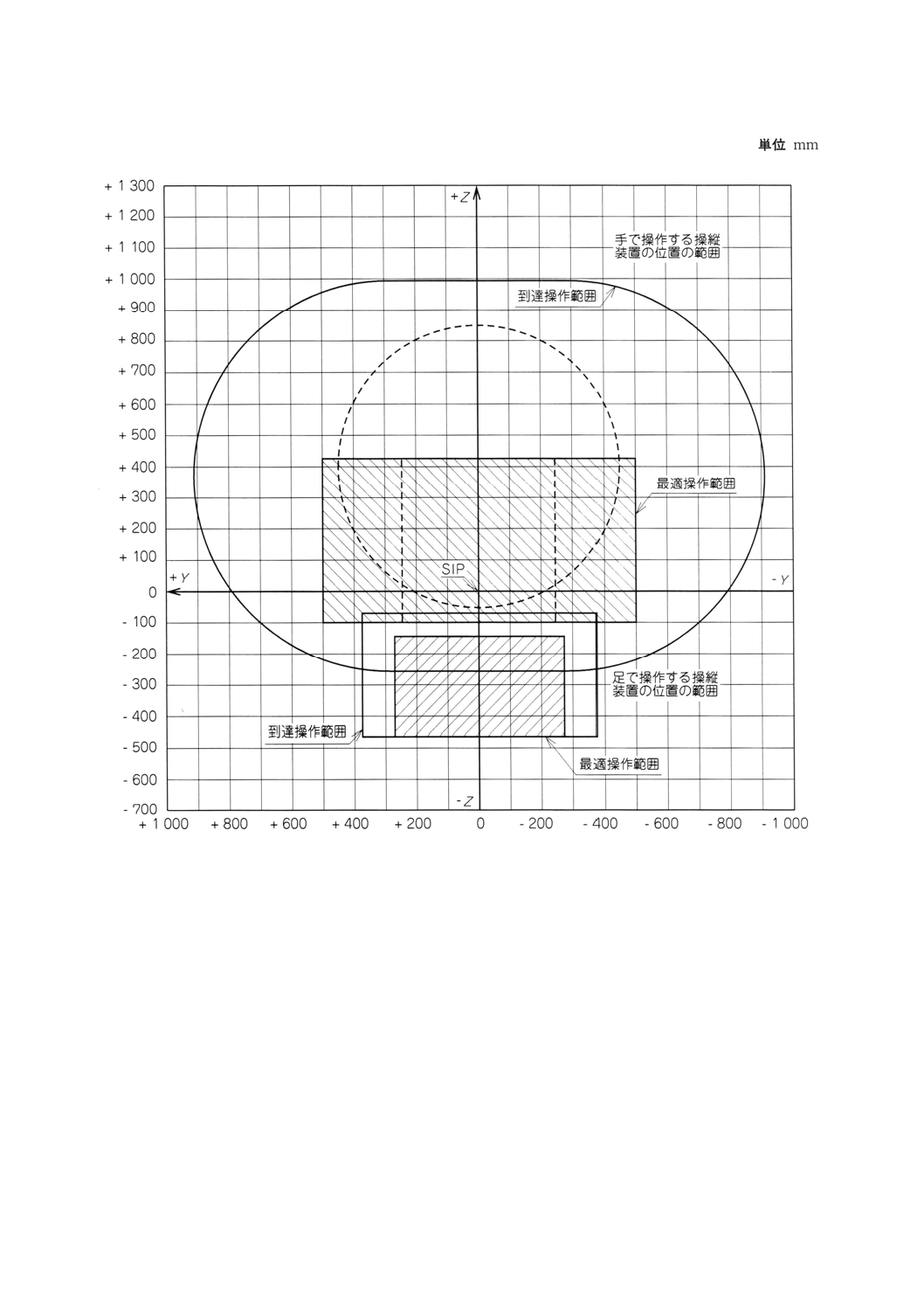
手及び足で操作される操縦装置の最適操作範囲及び到達操作範囲を図1,図2及び図3に示す。これ
らの範囲は,ISO 3411に示される運転員の身体寸法に対応する。
4.3
操縦装置の位置の範囲は,大柄及び小柄運転員の共通の到達範囲によって決定される。これらの操
縦装置の位置の範囲を定めるために用いられる特定の条件を附属書Aに示す。
4.4
運転員が座席で向きを変えて,手で操作する後部機器の操縦装置の最適操作範囲は,SIPを通る垂直
軸の周りに30°までねん(捻)転させてよい。
4.5
指で操作する場合は,手で操作する場合の最適操作範囲及び到達操作範囲を,75mm延長してもよい。
4.6
附属書Bに,図1,図2及び図3を作図する際に用いるXYZ座標及び半径を示す。
3
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
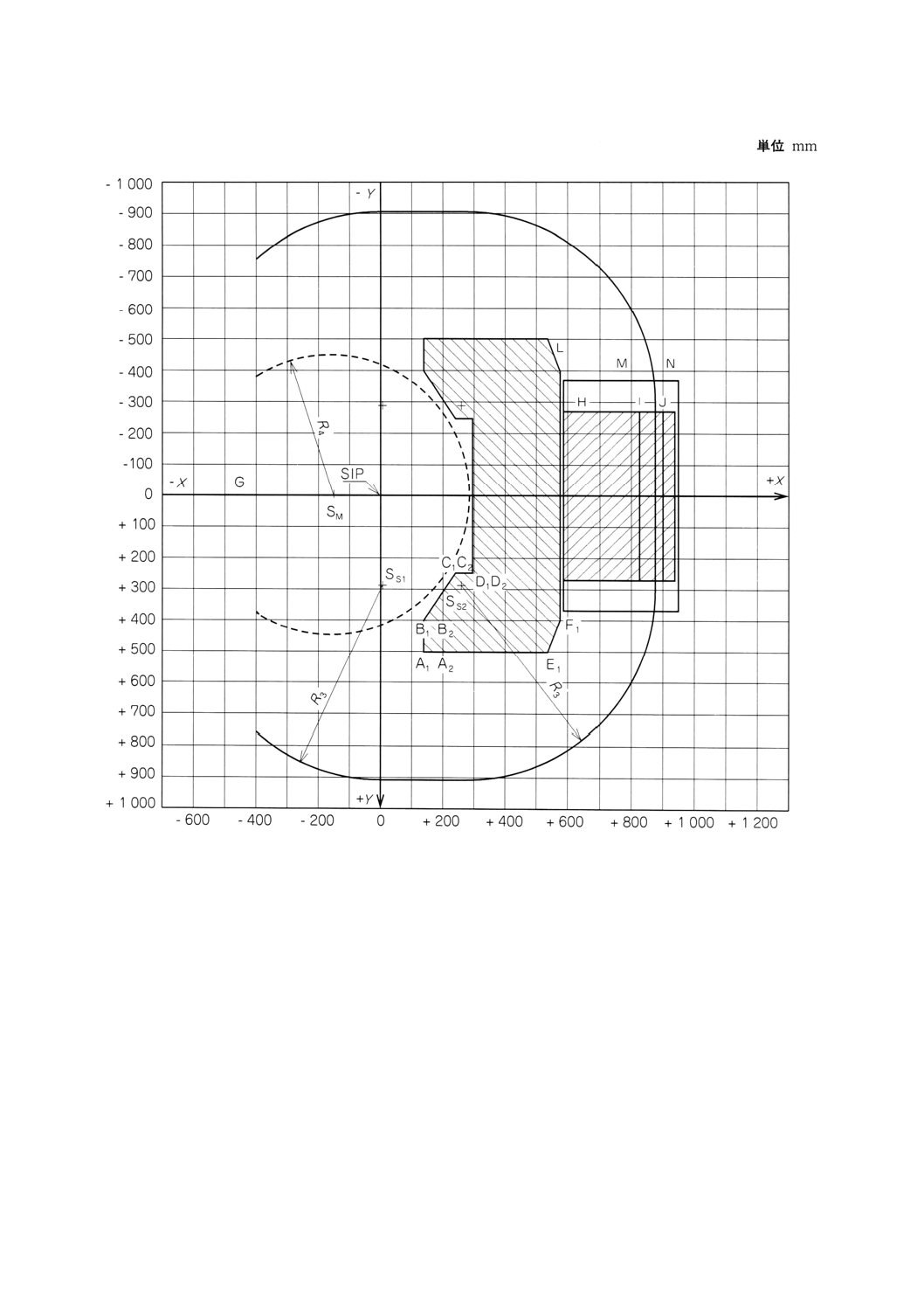
図1 最適操作範囲及び到達操作範囲−側面図
4
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2 最適操作範囲及び到達操作範囲−平面図
5
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 最適操作範囲及び到達操作範囲−正面図
6
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(規定) 操縦装置の位置の範囲を決定するために
用いられる特定の条件
(本体の図1,図2及び図3参照)
A.1 操縦装置の位置の範囲
A.1.1 座席の背当ては,傾斜角10°及び幅500mmとする。傾斜角が10±5°を超える場合,又は幅が
550mmを超える場合は範囲が変わる。
A.1.2 大柄及び小柄の両者に対して,座席は標準高さとする。上下方向の調整量(推奨値:75mm)は,
足は長いが腕が短いとか,胴は長いが足が短いなど個々の運転員の特徴に対応する。
A.1.3 座席の前後調整量は,150mmとする。小柄運転員は座席を最前方位置に調整し,大柄運転員は座
席の最後方位置に調整する。
A.1.4 座席前後調整範囲が100〜150mmの場合,操縦装置の位置の範囲は,次のとおりとする。
a) 手で操作する場合,本体の図1,図2及び図3に示される範囲のままとする。
b) 足で操作する場合,本体の図1,図2及び図3に示された範囲に前後方向でそれぞれ25 mm狭くする。
附属書A表1 身体の関節間の長さ(本体の図1参照)
単位 mm
記号
身体
大柄運転員
小柄運転員
SH
肩−腰
480
396
HK
腰−膝
452
372
KA
膝−足首
445
367
AA'
足首−靴底
119
98
AP
足首−ペダル踏点(A4=90°のとき)
150
124
SE
肩−肘
300
247
EW
肘−手首
267
220
EHg
肘−手の握り
394
325
AT
足首−爪先(A4=90°のとき)
243
200
−
腰−腰(水平方向)
185
152
−
肩−肩(水平方向)
376
310
7
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A表2 曲げ角度の範囲(本体の図1参照)
単位 度
記号
角度(右側関節)
動き
角度
最適
最大
A1
座席後傾角
屈曲
10
5〜15
胴
外転
0
−20
A2
腰
屈曲
75〜100
60〜110
内転
10
10
外転
−22
−30
A3
膝
屈曲
75〜160
75〜170
A4
足首
屈曲
85〜108
78〜115
A5
肩
屈曲
−35〜85
−50〜180
内転
20
20
外転
−70
−120
鎖骨部の捻転
20
20
A6
肘
屈曲
60〜180
45〜180
8
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(規定) 操縦装置の位置の範囲を決定する座標の概要
(附属書B図4,附属書B図5及び附属書B図6参照)
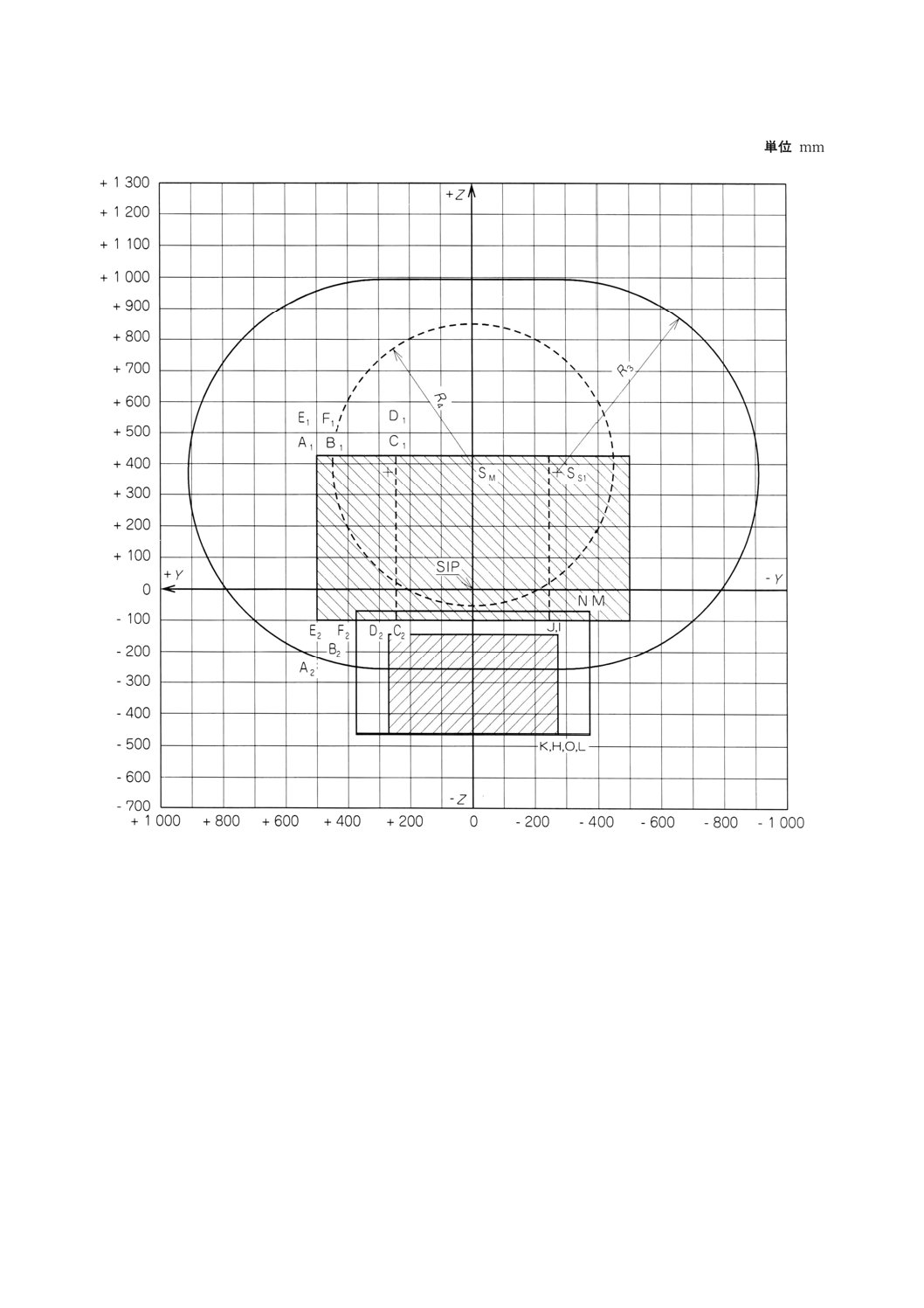
操縦装置の位置に対する最適操作範囲及び到達操作範囲を決定するための座標は,附属書B表3,附属
書B表4,附属書B表5及び附属書B表6に要約される。操作装置の位置の範囲は,X平面に関し対称な
ので片側だけ定めてある。反対側はY軸の符号を変えて決めることができる(本体の3.8参照)。
操縦装置の位置の範囲は,立体表面の角の座標と球面及び円筒面の中心座標と半径で決められる。手で
操作する操縦装置の到達操作範囲は,附属書B表4で決められる球面及びその球面に接する円筒面と平面
により決められる。
附属書B表3 最適操作範囲の座標系−手で操作する操縦装置の位置の範囲
単位 mm
円弧の中心(1)
座標
(X, Y, Z)
半径
SL
(−159, 188, 476)
R1=734
R2=691
点(1)
座標
(X, Y, Z)
A1
(132, 500, 425)
A2
(132, 500, −100)
B1
(132, 400, 425)
B2
(132, 400, −100)
C1
(230, 250, 425)
C2
(230, 250, −100)
D1
(296, 250, 425)
D2
(296, 250, −100)
E1
(530, 500, 425)
E2
(221, 500, −100)
F1
(573, 400, 425)
F2
(296, 400, −100)
注(1) 附属書B図4,附属書B図5及び附属書B図6参照
附属書B表4 到達操作範囲の座標系−手で操作する操縦装置の位置の範囲
単位 mm
円弧の中心(1)
座標
(X, Y, Z)
半径
Ss1
(6, 283, 368)
R3=625
Ss2
(245, 283, 368)
R3=625
SM
(−160, 0, 400)
R4=450
点(1)
座標
(X, Y, Z)
G
X=−400
注(1) 附属書B図4,附属書B図5及び附属書B図6参照
9
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B表5 最適操作範囲の座標系−足で操作する操縦装置の位置の範囲(備考参照)
単位 mm
円弧の中心(1)
座標
(X, Y, Z)
半径
Ks1
(446, −75, −32)
R5=500
点(1)
座標
(X, Y, Z)
H
I
J
K
(581, −275, −470)
(820, −275, −150)
(932, −275, −150)
(687, −275, −470)
注(1) 附属書B図4,附属書B図5及び附属書B図6参照
附属書B表6 到達操作範囲の座標系−足で操作する操縦装置の位置の範囲(備考参照)
単位 mm
円弧の中心(1)
座標
(X, Y, Z)
半径
Ks2
(441, −75, −65)
R6=500
点(1)
座標
(X, Y, Z)
L
M
N
O
(581, −375, −470)
(796, −375, −75)
(941, −375, −75)
(734, −375, −470)
注(1) 附属書B図4,附属書B図5及び附属書B図6参照
備考 世界には,ISO 3411に規定する小柄運転員よりも足の短い運転員の比率が5%を超える地域がある。このよう
な地域に適合させるために,附属書B表5及び附属書B表6に規定する円弧の中心(Ks1及びKs2)の座標及
び半径(R5及びR6)を,特別に調整するのがよい。そのための変更を次に示す。
Ks1の特別の座標:(441, −75, −32)
Ks2の特別の座標:(426, −75, −65)
R5の特別の値:R5=574
R6の特別の値:R6=475
この円弧の中心の座標及び半径変更によって,H, I, J, K, L, M, N及び0点の座標が変更される。
10
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B図4 最適操作範囲及び到達操作範囲−側面図
11
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B図5 最適操作範囲及び到達操作範囲−平面図
12
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B図6 最適操作範囲及び到達操作範囲−正面図
1
3
A
8
4
0
7
:
2
0
0
0
(I
S
O
6
6
8
2
:
1
9
8
6
. A
m
d
. 1
:
1
9
8
9
)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1(参考) JISと対応する国際規格との対比表
JIS A 8407 : 2000 土工機械−操縦装置の操作範囲及び位置
ISO 6682 : 1986 土工機械−操縦装置の操作範囲及び位置
(I)JISの規定
(II)国際規
格番
号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所
(V)JISと国際規格との技
術的差異の理由及び
今後の対策
項目番号
内容
項目番号
内容
項目ごとの評価
技術的差異の内容
1.適用範囲
操縦装置の位置の範囲を規定
ISO 6682
1.
JISに同じ
IDT
−
−
2.引用規格
本文で引用した規格を記載
2.
JISに同じ
IDT
−
−
3.定義
操縦装置,最適操作範囲,到
達操作範囲などを定義
3.
JISに同じ
IDT
−
−
4.操縦装置の位
置の範囲
主要操縦装置の位置,要求事
項などを規定
4.
JISに同じ
IDT
−
−
附属書A(規定) 操縦装置の位置の範囲を決定
するための条件を規定
附属書A
JISに同じ
IDT
−
−
附属書B(規定) 操縦装置の位置の範囲を決定
する座標の概要を記述
附属書B
Amd. 1で地域特性を
考慮して小柄運転員
よりも足の短い運転
員に関連した備考を
追加,これ以外は
Amd. 1を編集して取
り入れたJISと同一
MOD/追加
−
−
JISと国際規格との対応の程度の全体評価:MOD
備考1.項目ごとの評価欄の記号の意味は,次のとおりである。
― IDT……………………技術的差異がない。
― MOD/追加…………国際規格にはない規定項目又は規定内容を追加している。
2.JISと国際規格との対応の程度の全体評価の記号の意味は,次のとおりである。
― MOD…………………国際規格と一致している。
14
A 8407 : 2000 (ISO 6682 : 1986. Amd. 1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
土工機械分野調査委員会 構成表
氏名
所属
(委員会長)
○ 大 橋 秀 夫
学識経験者
中 島 誠
通商産業省機械情報産業局
本 間 清
通商産業省工業技術院標準部
高 橋 哲 也
労働省労働基準局安全衛生部
成 田 秀 志
建設省建設経済局建設機械課
吉 田 正
建設省土木研究所材料施工部
○ 橋 本 繁 晴
財団法人日本規格協会技術部
○ 杉 山 庸 夫
社団法人日本建設機械化協会
○ 藤 本 義 二
学識経験者
三 浦 甫
静岡理工科大学知能情報学科
西ケ谷 忠 明
日本建設機械化協会建設機械化研究所
小 田 征 宏
鹿島建設株式会社建設総事業本部機械部
小 室 一 夫
西松建設株式会社平塚製作所
青 山 俊 行
日本鋪道株式会社工務部
高 場 常 喜
株式会社熊谷組土木本部
青 木 義 清
株式会社アクティオ営業推進部
増 田 忠 和
大成建設株式会社安全・機材本部機械部
○ 本 橋 豊
住友建機株式会社設計開発室
○ 小 鷹 太
コマツ建機事業本部プロダクトサポート部
○ 栗 原 富士男
新キャタピラー三菱株式会社相模原事業所技術部
○ 小 田 秀 彦
油谷重工株式会社第1技術部
○ 宮 本 康 民
三菱重工業株式会社相模原製作所車両・電子技術部
○ 渡 辺 正
日立建機株式会社品質保証本部
(事務局)
○ 川 合 雄 二
社団法人日本建設機械化協会
○ 西 脇 徹 郎
社団法人日本建設機械化協会
備考 ○印は,小委員会を兼ねる。