A 8325:2010 (ISO 10265:2008)
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 一般的要求事項 ················································································································ 4
4.1 制動装置の要求事項 ······································································································· 4
4.2 操作装置 ······················································································································ 4
4.3 共通部品 ······················································································································ 5
4.4 警報装置 ······················································································································ 5
4.5 電子制御式制動装置 ······································································································· 5
5 試験条件························································································································· 6
5.1 試験場 ························································································································· 6
5.2 試験準備 ······················································································································ 6
5.3 測定機器 ······················································································································ 6
5.4 けん引方法 ··················································································································· 6
6 制動装置の試験及び性能基準 ······························································································ 6
6.1 主制動装置及び二次制動装置の試験··················································································· 6
6.2 駐車制動装置の試験 ······································································································· 8
6.3 解析及び構成部品レベルでの検証······················································································ 8
7 機械の取扱説明及び表示 ···································································································· 9
8 試験報告························································································································· 9
A 8325:2010 (ISO 10265:2008)
(2)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本建設
機械化協会(JCMA)及び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正
すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS A 8325:2001は改正され,この規格に置き換えられた。
また,令和2年10月20日,産業標準化法第17条又は第18条の規定に基づく確認公示に際し,産業標
準化法の用語に合わせ,規格中“日本工業規格”を“日本産業規格”に改めた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本産業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権及び出願公開後の実用新案登録出願にかかわる確認について,責
任はもたない。
日本産業規格 JIS
A 8325:2010
(ISO 10265:2008)
土工機械−履帯式機械−制動装置の性能要求事項
及び試験方法
Earth-moving machinery-Crawler machines-
Performance requirements and test procedures for braking systems
序文
この規格は,2008年に第2版として発行されたISO 10265を基に,技術的内容及び構成を変更すること
なく作成した日本産業規格である。
1
適用範囲
この規格は,履帯式機械の主制動装置,二次制動装置及び駐車制動装置の,性能基準及び試験方法につ
いて規定する。
この規格は,最高設計走行速度が20 km/h以下のゴム履帯式土工機械の派生機種を含め,JIS A 8308に
規定した自走式の履帯式機械に適用する。この規格は,ISO 17063の対象であるハンドガイド式機械及び
車輪式機械で車輪の上に履帯を巻いた機械には適用しない。最高設計走行速度が20 km/hを超える履帯式
機械には,JIS A 8340-1を適用する。
注記1 地下鉱山で使用する履帯式機械には,制動装置に対するその他の地域的又は特定場所の要求
事項が適用されることがある。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 10265:2008,Earth-moving machinery−Crawler machines−Performance requirements and test
procedures for braking systems(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8308 土工機械−基本機種−用語
注記 対応国際規格:ISO 6165,Earth-moving machinery−Basic types−Identification and terms and
definitions(MOD)
JIS A 8319 土工機械−走行速度の測定方法
注記 対応国際規格:ISO 6014,Earth-moving machinery−Determination of ground speed(IDT)
JIS A 8320 土工機械−機械全体,作業装置及び構成部品の質量測定方法
注記 対応国際規格:ISO 6016,Earth-moving machinery−Methods of measuring the masses of whole
2
A 8325:2010 (ISO 10265:2008)
machines, their equipment and components(IDT)
JIS A 8322 土工機械−寸法,性能及び容量の単位並びに測定の正確さ
注記 対応国際規格:ISO 9248,Earth-moving machinery−Units for dimensions, performance and
capacities, and their measurement accuracies(IDT)
JIS A 8919 土工機械−操縦装置
注記 対応国際規格:ISO 10968,Earth-moving machinery−Operator's controls(MOD)
ISO 10266,Earth-moving machinery−Determination of slope limits for machine fluid systems operation−
Static test method
ISO 15998,Earth-moving machinery−Machine-control systems (MCS) using electronic components−
Performance criteria and tests for functional safety
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
制動装置(Brake system)
機械を制動し,又は保持する目的で互いに連動し合って作用するすべての構成部品。操作装置,伝達装
置,制動装置本体,及び制動装置本体と履帯とを連結するすべての部品を含む。
3.1.1
主制動装置(service brake system)
機械を停止させ保持するために主に使用する制動装置。
3.1.2
二次制動装置(secondary brake system)
主制動装置に何らかの故障が1か所でも発生したときに,機械を停止するために使用される制動装置。
3.1.3
駐車制動装置(parking brake system)
停止している機械を静止状態に保持するための制動装置。
3.2 制動装置の構成部品(Brake system components)
3.2.1
操作装置(control)
制動装置本体を作動させるための作用力又は制御信号を伝えるために,運転員が直接操作する構成部品。
3.2.2
伝達装置(brake actuation system)
操作装置と制動装置本体との間に設け,これらを機能的に連結するすべての構成部品。
3.2.3
制動装置本体(brake)
機械の移動に抗する力(制動力)を直接発生する構成部品。
注記 制動装置本体としては,例えば,摩擦式,電気式,動力再生式,静油圧式,その他の油圧式な
どがある。
3
A 8325:2010 (ISO 10265:2008)
3.3
制動力(brake retarding force)
制動装置の作動によって機械を減速又は保持する力に転がり抵抗を加えたもの。原動機の制動作用(例
えば,エンジンブレーキ,リターダ,排気ブレーキ)は含まない。
注記 制動力は,実際には供試機械と,これをけん引又はつなぎ止める機械又は装置とを連結する器
具を介した力として測定される。
3.4
共通部品(common component)
主制動装置,二次制動装置又は駐車制動装置の二つ以上において,その機能を果たす構成部品。
3.5
機械質量(machine mass)M
JIS A 8320に従い,運転員,液体系統を規定量とし,必要に応じてキャブ,キャノピ,運転員保護構造
(それらのすべての構成部品及び取付け部を含む。)を取り付けた本体に,機械の製造業者が指定する作業
装置を取り付けて,最も重い組合せとしたときの機械の運転状態の質量。
注記 履帯式けん引機械(例えば,通常は積載状態で走行するためのバケット,ボウルを装着した機
械)では,積載質量を含む。
3.6
限界角(slope capability)α
最小17°から最大45°までの間で,その機械の制動性能を規定する傾斜角度。または,17°から45°
までの間で,機械の走行又は作業に関連して製造業者が規定する最大傾斜角度。
3.7
バックスロットル(back throttling)
傾斜面で機械を停止状態に保持するために,静油圧駆動又は類似駆動方式の機械で行うわずかに前進側
又は後進側に力を加える操作。
3.8
漸進的制動(modulated braking)
操作装置を操作することによって制動力を連続的及び漸進的に増大及び減少できる能力(例えば,レバ
ー,ペダル,制動装置及び減速装置の機能又はその他の装置による。)。
3.9
最高走行速度(maximum machine level surface speed)
JIS A 8319又は同等の方法で測定した機械の最高走行速度。
3.10
土工機械の派生機種(derivative earth-moving machine)
その機種本来と異なる構成によって,他の土工機械の特徴も併せもつ土工機械の形態(例えば,四輪の
代わりにゴム履帯四条を組み合わせたバックホウローダ)。
3.11
安全な状態(safe state)
機械の制御装置が故障した後,制御されていた機能,工程又は装置が自動又は手動で停止した状態か,
機能,工程又は装置に含まれる不意の作動や蓄積されたエネルギー暴発のような潜在的危険について,そ
れを防止するモードへ自動又は手動で切り替わった状態。
4
A 8325:2010 (ISO 10265:2008)
3.12
静油圧駆動装置(hydrostatic drive system)
機械の走行を駆動し減速する(容積式の)閉回路油圧駆動装置。
3.13
制動限界角(brake slope capability)
機械製造業者が公示する最大傾斜角度で,主制動装置によって停車可能な最大傾斜角度,並びに主制動
装置及び駐車制動装置のそれぞれによって静止状態に保持可能な最大傾斜角度のうち,いずれか小さいほ
うの値。
4
一般的要求事項
4.1
制動装置の要求事項
4.1.1
すべての機械は,次の制動装置を装備しなければならない。
− 主制動装置
− 二次制動装置
− 駐車制動装置
注記 主制動装置,二次制動装置及び駐車制動装置は,共通の構成部品を使用してもよく,3種類の
独立・分離した装置にしなくてもよい。何らかの単一の故障が発生したときに必要な性能は,
4.3に規定している。
4.1.2
切離し機器
4.1.2.1
一般
制動装置には,4.1.2.2及び4.1.2.3に示す許容し得る配置を除き,制動を不能にするクラッチ又は変速機
のような切離し機器を含んではならない。
4.1.2.2
駐車制動装置切離し機器
自走不能となった機械を移動するための駐車制動装置切離し機器は,運転席から操作できない位置に設
置しなければならない。ただし,運転席から直ちに再制動できるようになっている場合は除く。
4.1.2.3
主制動装置又は二次制動装置の切離し機器
寒冷地での(原動機)始動のため,主制動装置又は二次制動装置の動力源を切り離すよう設計されたい
かなる機器も,主制動装置又は二次制動装置を切り離す前に駐車制動装置を作動させなければならない。
4.2
操作装置
4.2.1
一般
すべての制動装置の操作装置は,運転員が運転位置から操作できなければならない。駐車制動装置は,
直ちに運転員が再制動できる場合を除き,一度制動をかけた後,制動装置を開放操作できないように配置
しなければならない。操作装置の配置は,JIS A 8919による。
電子制御式を含め,いかなる制動装置を装備する機械であっても,操作装置を通常に運転作動している
間(例えば,機械の始動,停止,通常走行の間),制御によらない制動性能(例えば,制動装置の不規則な
作動,開放,制動効果のばらつき)を防止するか,又は最小にしなければならない。
4.2.2
自動作動
二次制動装置及び駐車制動装置は,自動的に作動するもの(例えば,ばね駆動)であってもよい。自動
作動に対しては漸進的な効きを要求しない。
5
A 8325:2010 (ISO 10265:2008)
4.2.3
操作力
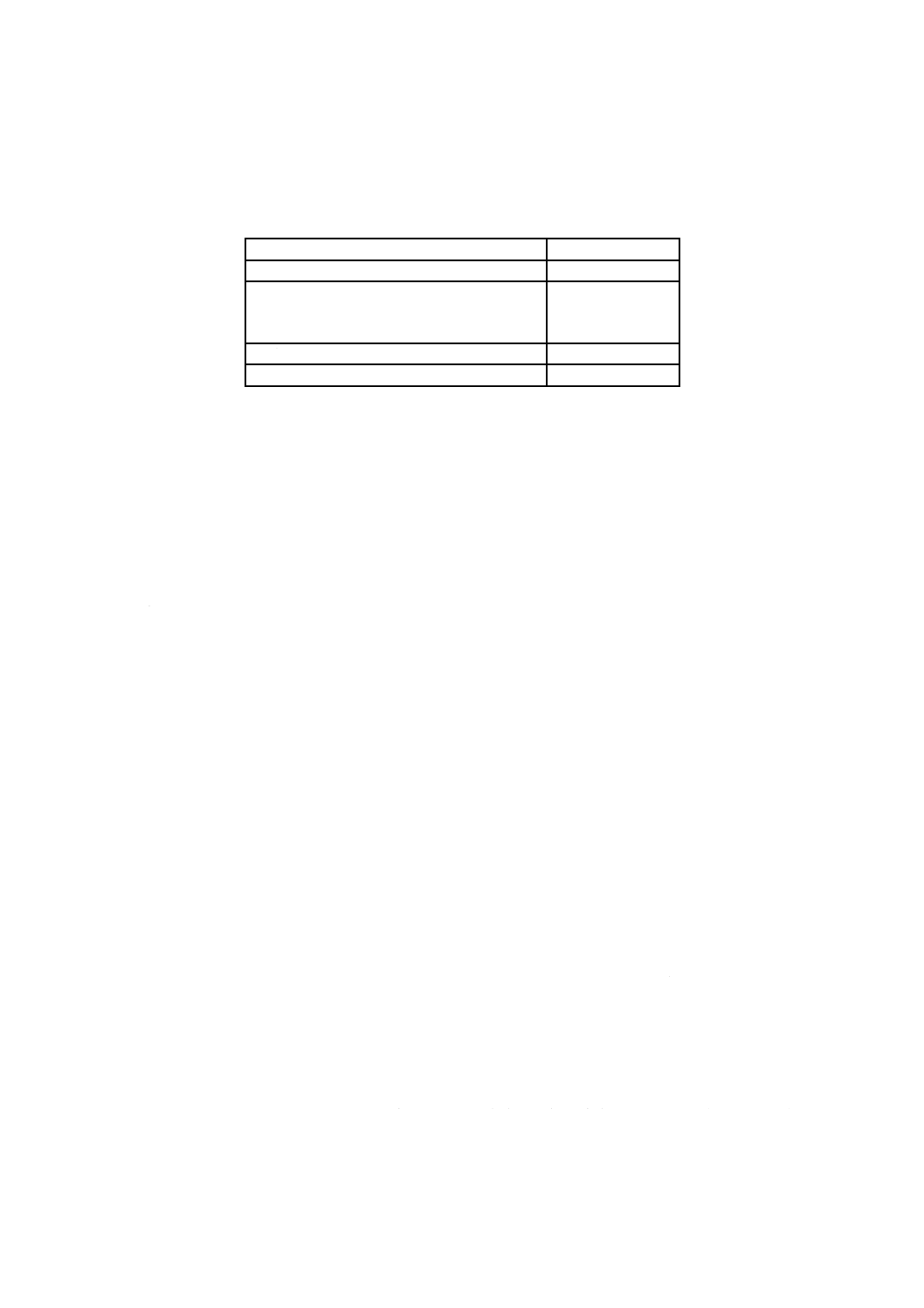
操作装置の操作力は,制動装置の性能(表2参照)を測定する場合,表1に示す値を超えてはならない。
表1−制動試験における最大操作力
操作装置の形式
最大操作力(N)
指のつかみ(フリップレバー及びスイッチ)
20
手の握り
− 上方
− 前後方向,横方向,下方
400
300
足踏み板(足首操作)
350
足踏みペダル(脚操作)
600
4.3
共通部品
制動装置(主制動装置,二次制動装置及び駐車制動装置)には共通の構成部品を使用してもよい。ただ
し,いかなる単一構成部品の故障があっても,6.1.4に規定した二次制動装置の制動能力を下回ってはなら
ない。
制動装置のうち一系統を作動させるために使用する共通部品(レバー,ペダル,マイクロプロセッサ,
配線,油圧弁など)の故障は,故障発生後であっても機械の制動能力が6.1.4に規定した二次制動装置の
制動能力に適合する場合には許容される。この制動能力は,自動的に作動しても差し支えなく,漸進的な
効きでなくてもよい。
4.4
警報装置
主制動装置に蓄積エネルギーを使用する場合は,そのエネルギー蓄積装置に,警報装置を備えなければ
ならない。警報装置は,装置の蓄積エネルギーが次のうち大きいほうの値を下回ったときに作動しなけれ
ばならない。
− 製造業者の規定する運用最大エネルギーの50 %,又は,
− 蓄積エネルギーが,6.1.4に規定された二次制動装置の要件を満足するのに必要なレベル。
警報装置は,連続的な光学式信号・音響式信号によって即座に運転員の注意を引くものでなければなら
ない。圧力又は真空を示す計器は,この要求に適合しない。
注記 機械式ばねは,エネルギー蓄積装置とはみなさない。
4.5
電子制御式制動装置
制動装置の電子制御装置は,リスクアセスメントの手法によって(故障発生の場合に)製造業者が規定
する安全な状態を満足するものでなければならない。ISO 15998に適合する電子制御装置は,この要求事
項を満足する。
電子制御装置を備える機械の最高走行速度が設計上6 km/hに制限されている場合は,制動装置のいずれ
かが,6.1.3に規定する主制動装置の性能要求事項に適合すれば,ここで規定する安全な状態の要求事項を
満足する。
注記1 安全な状態は,頑健な設計,高度の信頼性,又は事前の警報を行う実際的な方法がない場合
でも,故障モードでの非常停止操作によって実現される。
注記2 リスクアセスメント及び操作方法を通じて安全な状態へ適合するには,電気・電子制御系の
ISO 15998のようなISO規格若しくはIEC規格又はそれらと同一か同等のJISを使用できる。
6
A 8325:2010 (ISO 10265:2008)
5
試験条件
5.1
試験場
5.1.1
平たん(坦)な試験路面
試験路面は,走行方向のこう(勾)配が1 %以下,横断こう(勾)配が3 %以下の比較的平たん(坦)
で滑らかな試験路とし,また,箇条6に示す被けん引又はけん引試験が実施可能な十分な寸法,長さ,材
料などの条件を備えたものとする。土道試験路面の含水比は,試験機械の質量による沈下量がわずかにと
どまるように調整する。
5.1.2
代替静的試験場
6.1.2の代替静的試験は,平たん(坦)な試験路面又は室内実験場で行ってもよい。供試機械は,けん引
表面上の履帯,又は地表面上にある履帯,若しくはけん引力計と連結した軸でけん引力を測定するように
設置する平たん(坦)な試験路面又は室内実験場で行ってもよい。
5.2
試験準備
a) 制動試験は,制動に関して最も不利となる機械の構成で実施する。機械質量は,この規格で別途規定
しない限り,3.5の定義によらなければならない。
b) 制動装置のすべての試験条件,例えば,制動装置の調整,制動装置の圧力,履帯の張りなどは機械製
造業者の指定する状態とする。試験中は,制動装置に対して人為的に調整を加えてはならない。
c) それぞれの制動試験は,互いの制動装置に干渉しないように行うものとする。例えば,主制動装置の
試験を行うときに,駐車制動装置を使用して主制動装置の能力を補強してはならない。
d) 被けん引又はけん引のための連結は,けん引かん(桿)又は他の適切な連結点で行い,できる限り低
い位置とする。けん引力は,測定対象の機械の接地条件に影響しないよう,水平に負荷する。
e) 排土板,バケット,チェーン,ドーザ及びその他の装備品は,製造業者が推奨する輸送姿勢又は走行
姿勢に保持する。
f)
試験前に,制動装置本体のすり合わせ(摩擦面調整手順)を行ってもよいが,その方法は取扱説明書
に記載し,かつ,機械及び/又は制動装置の製造業者に問い合わせ確認したものでなければならない。
g) この規格で別途規定しない限り,試験の直前に,エンジン,変速機などの油液類を製造業者が規定す
る正常な作動温度になるまで,その機械を暖機運転する。
5.3
測定機器
試験項目を測定及び記録する機器は,JIS A 8322に規定する精度をもったものでなければならない。
5.4
けん引方法
箇条6に規定する性能基準の要求するけん引力及び制動力を得るためには,別の機械,ウインチなどの
手段を用いる必要がある。
6
制動装置の試験及び性能基準
6.1
主制動装置及び二次制動装置の試験
6.1.1
平たん(坦)な試験コースでのけん引試験
主制動装置及び二次制動装置の性能は,変速機を中立にして,供試機械の最高走行速度の10〜40 %の速
度でけん引して試験する。制動操作を行い,制動力(けん引力)及び操作力を測定する。
静油圧駆動若しくは類似の駆動装置を備えた機械,又は変速機を中立にすると自動的に制動するように
設計した自動制動装置を備えた機械は,けん引車と同じ速度で走行させ,該当する操作装置を制動位置に
操作するか又は変速機を中立位置に操作して,試験する制動装置を働かせることによって試験する。
7
A 8325:2010 (ISO 10265:2008)
6.1.2
主制動装置及び二次制動装置に対する代替静的試験
静油圧駆動,又は類似の駆動装置若しくは摩擦材料を用いないその他の制動装置は,静的方法及び動的
方法の両方で同等の制動能力をもつので,静的試験手段を用いて試験してもよい(試験路面及び室内設備
については,5.1.2参照)。
主制動装置又は二次制動装置の性能は,例えば,つなぎ止める器具をけん引する推進力又はウインチに
よるけん引に抵抗する推進力を働かせることによって静的方法で試験する。けん引推進力の測定結果は,
制動力とみなし,履帯又は機械の転がり抵抗に対する補正をしなくてもよい。制動力(けん引力)と共に
操作力を測定する。
6.1.3
主制動装置の性能基準
主制動装置は,表1に示す値以下の操作力を作動させた場合,前進及び後進とも,表2に示す値以上の
制動力がなければならない。
3.6に定義し限定した限界角(α)は,5.2に示す走行姿勢で,摩擦係数(μ)1.0の地面を自力で登坂で
きる角度の最大値である。主制動装置は,液体系統の作動限界(ISO 10266参照),転倒限界,又はけん引
力の限界にかかわらず,少なくとも17°の制動限界角に相当する制動性能をもたなければならない。
注記 最大限界角は,定義から45°である。
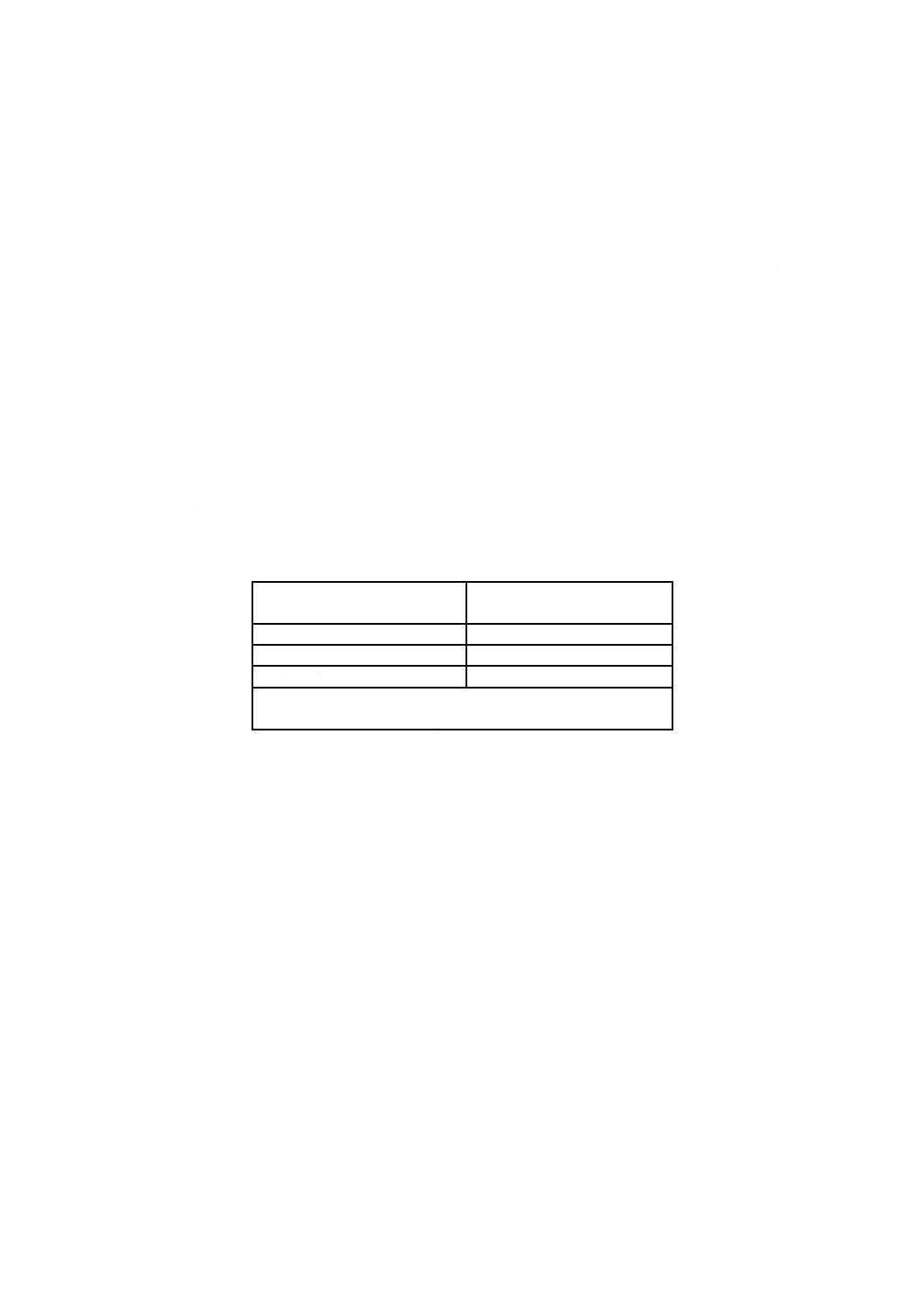
表2−履帯式機械の制動装置の性能基準
制動装置
制動力
N
主制動装置
9.8 M sinα
二次制動装置
4.9 M sinα
駐車制動装置
9.8 M sinα
注記 α は,限界角で,度単位で示す(3.6参照)。
Mは,機械質量で,kg単位で示す(3.5参照)。
6.1.4
二次制動装置の性能基準
履帯式機械には,各履帯に独立した等しい能力の制動装置をもっているものがある。片側の履帯の制動
装置が故障した場合,残る他の一方の制動装置が正常に機能して,この箇条の二次制動装置の要求性能を
満足すれば十分である。主制動装置の試験(6.1.3参照)と同じ限界角によって二次制動装置を作動させた
とき,表1の操作力で前進及び後進の両方に発生する制動力は,表2に示す値以上でなければならない。
6.1.5
主制動装置の保持能力の試験
6.1.5.1
一般
すべての機械は,前進又は後進のいずれか効きの悪いほうで,箇条5に規定する試験条件に従って試験
しなければならない。
6.1.5.2
主制動装置の保持能力の試験
保持能力試験は,次のいずれかによって実施してもよい。
a) 適切な傾斜のある試験場。
b) 滑り止めを施した表面の傾斜試験台。
c) 走行方向のこう(勾)配が1 %以下の試験路面上で,静止した機械の制動装置を作動させ,変速機を
中立にしてけん引力を負荷する。必要なけん引力は,表2に規定する値とする。
けん引力は,6.1.5.3に規定する傾斜と同等の最小の力を実現するよう水平に負荷する。
8
A 8325:2010 (ISO 10265:2008)
6.1.5.3
主制動装置の保持能力の基準
主制動装置は,駆動装置を切り離し(静油圧駆動又はその他類似の駆動方式を使用している場合を除く。),
原動機は稼働状態で,その限界角で静止状態に保持できる能力がなければならない。静油圧駆動又は類似
の駆動方式では,この要求を満たすためにバックスロットルを使用してもよい。
注記 機械の限界角は,最小17°から最大45°までの間の値,又は最小17°から最大45°までの間
で製造業者が指定する限界角のいずれかとすることができる。
6.2
駐車制動装置の試験
6.2.1
駐車制動装置の試験
駐車制動装置の性能は,駐車制動装置を作動させ,変速機を中立にして静止した供試機械をけん引する
ことによって試験する。静的制動力(けん引力)と操作力とを測定する。
機械式駐車制動装置が発揮する制動トルクの最小値は,走行駆動装置が発揮する最大トルクを超えるか,
又は駐車制動装置を作動させたとき,変速装置を中立にする操作装置でなければならない(すなわち,駐
車制動装置作動中の走行を防止する。)。この要求を満たさない駐車制動装置の場合は,駐車制動装置が作
動中でも機械が駆動されており,その結果,駐車制動装置が損傷するか,又は調整が必要になることを運
転員に知らせる表示装置を備えなければならない。
6.2.2
駐車制動装置の性能基準
駐車制動装置は,表1に規定する操作力で作動させたとき,前進又は後進のいずれにおいても履帯が動
かず,発生する制動力が表2に示す値以上でなければならない。
6.2.3
駐車制動装置の作動及び耐久性
ばねによって作動する駐車制動装置は,次のいずれかの状態で作動させたとき,6.2.2に規定する駐車制
動装置の保持基準を達成しなければならない。
a) 温度−25 ℃の環境下で2.5秒以内での制動装置作動:この試験を実施する前に,低温均熱後,最長5
分間原動機の暖機運転(すなわち,原動機は推奨運転速度で他の操作なしに運転する。)をしてもよい。
b) 機械がじわじわと300 mm動く前に駐車制動装置を作動させなければならない。この評価方法でのじ
わじわした動きとは,機械を通常の運転温度の下で10°の傾斜上に置き,変速機を中立にして駐車制
動を解除したとき,機械が静止状態から動き出す動作である。
駐車制動装置が二次制動装置も兼ねる場合は,駐車制動装置は最高走行速度から機械を一度制動停止さ
せた後に,駐車制動装置に手を加えることなしに,静的な保持基準を満足しなければならない。上記の必
要な制動停止は,荷を運搬する機械であっても積載負荷なしで実施する。
6.2.4
制動作用維持の基準
駐車制動装置は,機械製造業者の仕様に従って制動操作後,制動装置部品の収縮,漏れなどの有無にか
かわらず,表2に規定する駐車制動性能を維持しなければならない。駐車制動装置は,その性能を維持す
るため蓄積エネルギー源に依存してはならない。
6.3
解析及び構成部品レベルでの検証
6.3.1
一般
表2の性能基準を満足していることを,解析モデルと実際の屋外試験との相関関係で実証していれば(例
えば,解析結果が実証試験と同等又はより安全側であることを合理的で技術的な確かさによって裏付ける
実証試験データ),解析及び構成部品レベルでの検証方法を用いてもよい。
解析結果を性能検証に使用する場合は,相関関係を証明する原資料を参照として付けて,試験報告書に
その旨を示さなければならない。機械の製造業者は,その文書保存方針に基づいて試験データを検証結果
9
A 8325:2010 (ISO 10265:2008)
の記録として保存しなければならない。
6.3.2
制動装置の代替室内試験
実験室内でも制動装置の機能を再現可能な場合は,主制動装置,二次制動装置及び駐車制動装置の能力
を決定するために代替室内試験を実施してもよい。室内試験用機器は,実際の機械と同じ制御用圧力及び
流量(JIS A 8322に従って試験公差2 %)を供給できる能力をもつのがよい。試験装置は,制動装置の保
持力又は制動力のいずれか大きいほうを上回る制動トルクに耐えて測定できるものでなければならない。
主制動装置及び二次制動装置については,制動装置の回転速度は,6.1.1に規定した試験要求事項に適合
する履帯の速度に基づいて決定しなければならない。駐車制動装置については最大保持トルクを測定する
のがよい。試験報告書には室内試験を実施して性能を検証した旨を試験機関の名称及び住所(例えば,製
造業者又は部品製造業者の試験所)を含め記述しなければならない。
6.3.3
室内試験に基づくけん引力の計算
実験室内で測定された静的及び動的制動トルクは,計算によって同等のけん引力に換算しなければなら
ない。室内試験に基づく同等のけん引力は,表2の要求事項を満足しなければならない。
計算では,制動装置本体と履帯との間の減速比(歯車比)をすべて考慮しなければならない。すべての
計算を試験報告書に含めなければならない。
7
機械の取扱説明及び表示
製造業者の仕様による操作装置の運転上の制約は,次のいずれかに含めなければならない。
− 取扱説明書
− 機械の表示装置が表示する説明表示又は読み取れる情報
取扱説明には,制動装置が故障して,制動又は減速操作の制約が自動的に変化して制動能力の特性が変
わる(例えば,減速機が自動的に中立となる)場合,又は駐車制動装置が作動して損傷を受ける場合は,
それらに対する運転上の警告を含めなければならない。
制動装置本体又は機械の製造業者が制動装置のすり合わせを推奨する場合は,その手順を機械の取扱説
明書・整備解説書に記載しなければならない。
機械の制動限界角は,取扱説明書又は機械に付した標識に示さなければならない。
主制動装置及び駐車制動装置の性能状態を評価するための定期点検方法を示さなければならない。
8
試験報告
試験報告書には,次の事項を含めなければならない。
a) 参照規格,すなわちJIS A 8325
b) 機械の形式
例 後方超小旋回形油圧ショベル
c) 機械の製造業者名
d) 機械の型式及び製造番号
例 (機械の型式)○○建機HE 75 MTRX-5
e) 制動装置の状態(例 新品,1 000時間使用,など)
f)
機械質量(単位:kg)
g) 製造業者が保証する最大の機械質量(単位:kg)
h) 制動機構装置本体の説明(例 ディスク又はドラム,手操作又は足操作)
10
A 8325:2010 (ISO 10265:2008)
i)
制動装置の形式(例 機械式,油圧式,ばね式,静油圧駆動)
j)
試験路面の走行方向及び横断方向のこう(勾)配
k) 制動装置の全試験結果
l)
操作装置に加えられた操作力(4.2.3参照)
m) 6.1.2の代替静的試験で使用した設備及び方法
n) 試験路面の寸法,構造及び状態
o) 対応関係が立証されている情報源を参照して解析的手法を使用したこと。6.3に関連する計算結果並び
に6.3.2及び6.3.3の解析的確認のための対応データ
p) 試験機関の名称及び住所などの識別事項
注記 製造業者又は部品製造業者の試験所の文書は,この要求を満足する。
参考文献 [1] JIS A 8340-1:2004 土工機械−安全−第1部:一般要求事項
注記 対応国際規格:ISO 3450:1996,Earth-moving machinery−Braking systems of
rubber-tyred machines−Systems and performance requirements and test procedures
(MOD)
[2] ISO 17063:2003,Earth-moving machinery−Braking systems of pedestrian-controlled machines
−Performance requirements and test procedures