A 8317-1:2010
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 測定器···························································································································· 2
5 試験環境························································································································· 3
5.1 一般 ···························································································································· 3
5.2 試験場所及び音場補正値,K2A ·························································································· 3
5.3 試験場所 ······················································································································ 3
5.4 暗騒音の補正値,K1A ······································································································ 4
5.5 気象条件 ······················································································································ 4
6 A特性時間平均音圧レベルの測定 ························································································ 4
6.1 半球測定表面の寸法 ······································································································· 4
6.2 半球測定表面上のマイクロホンの位置················································································ 4
6.3 機械の配置 ··················································································································· 5
7 機械の設定及び運転 ·········································································································· 6
7.1 一般 ···························································································································· 6
7.2 機関回転速度 ················································································································ 6
7.3 ファン速度 ··················································································································· 6
7.4 機械の走行モードでの運転 ······························································································ 7
8 A特性音響パワーレベルの決定 ··························································································· 7
8.1 測定手順 ······················································································································ 7
8.2 A特性音響パワーレベルの計算 ························································································· 8
8.3 測定結果の算出 ············································································································· 8
9 記録事項························································································································· 8
10 報告事項 ······················································································································· 9
10.1 情報 ··························································································································· 9
10.2 音響放射値及び不確かさの宣言 ······················································································· 9
附属書A(規定)基本寸法及び機械追加仕様 ············································································ 10
附属書B(規定)ショベル系掘削機(油圧ショベル及び機械式ショベル) ······································ 21
附属書C(規定)ブルドーザ(ドーザ) ·················································································· 23
附属書D(規定)ローダ ······································································································· 24
附属書E(規定)バックホウローダ ························································································ 26
附属書F(規定)ダンパ(重ダンプトラック及び不整地運搬車) ·················································· 27
附属書G(規定)グレーダ ···································································································· 29
A 8317-1:2010 目次
(2)
ページ
附属書H(規定)ランドフィルコンパクタ ··············································································· 30
附属書I(規定)トレンチャ ·································································································· 31
附属書J(規定)スクレーパ ·································································································· 32
附属書K(規定)パイプレーヤ ······························································································ 34
附属書L(規定)ローラ ······································································································· 35
附属書M(参考)土工機械が発生するA特性音響パワーレベルの測定−
動的試験条件に関する追加指針 ························································································ 36
附属書N(参考)音響放射値及び不確かさの宣言 ······································································ 37
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 38
A 8317-1:2010
(3)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本建設
機械化協会(JCMA)及び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正
すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS A 8317-1:2001は改正され,この規格に置き換えられた。
また,令和2年10月20日,産業標準化法第17条又は第18条の規定に基づく確認公示に際し,産業標
準化法の用語に合わせ,規格中“日本工業規格”を“日本産業規格”に改めた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本産業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権及び出願公開後の実用新案登録出願にかかわる確認について,責
任はもたない。
JIS A 8317の規格群には,次に示す部編成がある。
JIS A 8317-1 土工機械−音響パワーレベルの決定−動的試験条件
JIS A 8317-2 土工機械−運転員位置における放射音圧レベルの決定−動的試験条件
日本産業規格
JIS
A 8317-1:2010
土工機械−音響パワーレベルの決定−動的試験条件
Earth-moving machinery-Determination of sound power level-
Dynamic test conditions
序文
この規格は,2008年に第2版として発行されたISO 6395を基とし,その附属書Nに規定する,測定し
たA特性音響パワーレベルの再現性の標準偏差の最大値が最新の技術を反映していないため,附属書Nを
“規定”から“参考”に変更して作成した日本産業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,土工機械が,動的試験条件の下で運転しているときに周囲に放射する騒音を,A特性音響
パワーレベルとして決定する方法について規定する。
この規格は,附属書A及びJIS A 8308に規定する土工機械に適用する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 6395:2008,Earth-moving machinery−Determination of sound power level−Dynamic test
conditions(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8308 土工機械−基本機種−用語
注記 対応国際規格:ISO 6165,Earth-moving machinery−Basic types−Identification and terms and
definitions(MOD)
JIS C 1509-1 電気音響−サウンドレベルメータ(騒音計)−第1部:仕様
注記 対応国際規格:IEC 61672-1,Electroacoustics−Sound level meters−Part 1: Specifications(IDT)
JIS D 0006-1 土工機械−機関−第1部:ネット出力試験方法
注記 対応国際規格:ISO 9249,Earth-moving machinery−Engine test code−Net power(IDT)
JIS Z 8733:2000 音響−音圧法による騒音源の音響パワーレベルの測定方法−反射面上の準自由音場
における実用測定方法
2
A 8317-1:2010
注記 対応国際規格:ISO/DIS 3744:2006,Acoustics−Determination of sound power levels and sound
energy levels of noise sources using sound pressure−Engineering methods for an essentially free
field over a reflecting plane(MOD)
ISO 6393:2008,Earth-moving machinery−Determination of sound power level−Stationary test conditions
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS A 8308及びJIS Z 8733によるほか,次による。
3.1
A特性時間平均音圧レベル(time-averaged A-weighted sound pressure level)LpA,T
測定時間T内で,時間とともに変動する対象音と同じ平均二乗音圧をもつ,連続で定常な音の音圧レベ
ルで,A特性で重み付けたもの。単位はデシベル(dB)。
3.2
A特性音響パワーレベル(A-weighted sound power level)LWA
基準音響パワーに対する測定対象機器によって放射された音響パワーとの比の常用対数の10倍で,A特
性で重み付けたもの。基準音響パワーは,1 pW(10-12 W)。
3.3
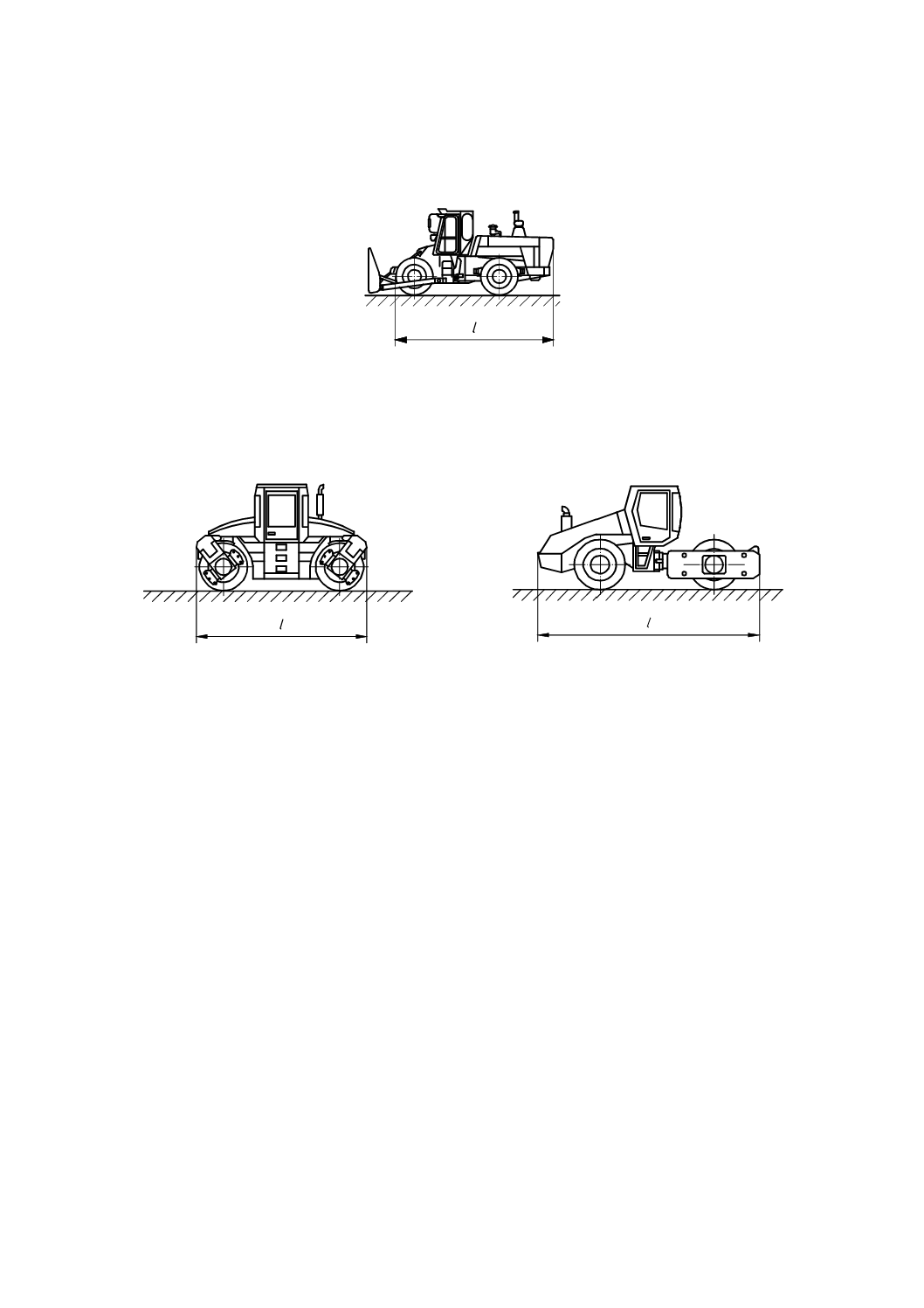
基本寸法(basic length)l
半球測定表面の半径(以下,測定半径という。)を定義するために使用する寸法。
注記 基本寸法lは,附属書Aに規定している。
3.4 機械中心(machine centre point)
3.4.1
機械中心(上部旋回体をもつ機械を除くすべての機械で)(machine centre point)
機械の前後方向中心軸上で基本寸法lの中点。
3.4.2
機械中心(上部旋回体をもつ機械で)(machine centre point)
上部旋回体の旋回中心。
3.5 ファン速度(fan speed)
3.5.1
ファン最高作動速度(maximum working speed of the fan)
機械が最も厳しい重作業状態の下で,ファンが最高の冷却性能を発揮するときのファンの回転速度。
3.5.2
連続可変速ファン駆動(fan drive with continuous variable speed)
ファンの回転速度を,熱負荷に対応した所要の冷却性能を得るのに必要な最低速度に連続的に変化させ
る方式のファン駆動系。
4
測定器
騒音測定機器は,箇条8に規定する測定を行う能力がなければならない。データを得るための測定装置
には,JIS C 1509-1のクラス1の要求事項に適合する積分平均形のサウンドレベルメータ(騒音計)を推
奨する。
3
A 8317-1:2010
5
試験環境
5.1
一般
この規格には,JIS Z 8733:2000の4.及び附属書Aに規定する試験環境を適用する。さらに,この規格固
有の要求事項を5.2〜5.5に示す。
相対湿度,温度,気圧,振動及び漂遊電界は,測定器の製造業者の規定する限界内とする。
5.2
試験場所及び音場補正値,K2A
試験場所の測定地表面がコンクリート舗装又は密粒度アスファルト舗装のように硬い反射面[5.3.1 a)
及びb) 参照]で,音源中心から測定半径の3倍の距離以内に,音を反射する障害物がない場合は,音場
補正値K2Aの絶対値は0.5 dB以内と推定されるので,影響は小さく,無視してよい。この場合,K2Aは,0
とする。
試験場所の測定地表面が全面砂地[5.3.1 c) 参照]の場合は,音場補正値K2Aを求める必要があり,音響
パワーレベルの計算に用いる。
5.3
試験場所
5.3.1
一般
試験場所の測定地表面は,次の3種類とし,5.3.2,5.3.3及び5.3.4に詳細を示す。
a) 硬い反射面(コンクリート舗装又は密粒度アスファルト舗装)
b) 硬い反射面と砂との組合せ
c) 全面が砂の面
5.3.2に規定する硬い反射面は,次の試験に用いる。
− ゴムタイヤ式の機械:すべての運転モード
− 掘削機械(ショベル系掘削機及びトレンチャ):すべての運転モード
− 履帯式ローダなど:定置作業サイクル模擬モード
− ローラ:すべての運転モード
5.3.3に規定する硬い反射面と砂との組合せは,突起のあるパッドをもつローラ及びランドフィルコンパ
クタの試験に使用してもよい。
5.3.3に規定する硬い反射面と砂との組合せ又は5.3.4に規定する全面が砂の測定場所地表面は,履帯式
機械(例えば,履帯式ブルドーザ,履帯式ローダ,履帯式不整地運搬車など)の走行モード及び定置作業
サイクル模擬モードにおいて次の条件で使用する。
− JIS Z 8733:2000の附属書Aによって決定した音場補正値K2Aの絶対値は2.0 dB以下とする。
− 5.3.4に規定した全面が砂の測定場所地表面でK2Aの絶対値が0.5 dBを超える場合は,音響パワーレベ
ルを計算するときに補正を考慮する。
5.3.2
硬い反射面
マイクロホンで囲われた半球測定表面の地上への投影面は,コンクリート舗装又は密粒度アスファルト
舗装からなる。
5.3.3
硬い反射面と砂との組合せ
機械の走行路は,粒径が2 mm以内の湿った砂の層で造成する。砂層の深さは最小0.3 mとする。0.3 m
では履帯が貫通して不足する場合は,砂層の深さを適宜増やす。機械とマイクロホンとの間の地表面で走
行路以外は,5.3.2に示す硬い反射面とする。
砂の走行路の片側だけが反射面からなる最小寸法の組合せを用いることができる。その場合は,3個の
マイクロホン位置に対して,機械の前進走行モードを2回,ただし,2回目は逆向きに走行し,後進走行
4
A 8317-1:2010
モードも同様に行う。
5.3.4
全面が砂の面
砂については,5.3.3による。
5.4
暗騒音の補正値,K1A
JIS Z 8733に規定する暗騒音についての要求事項に適合しなければならない。暗騒音に関する補正は,
JIS Z 8733:2000の8.3に従って行う。
5.5
気象条件
測定は,次の条件で行ってはならない。
a) 降水のあるとき,すなわち,降雨,降雪,降ひょう(雹)。
b) 地表面が積雪で覆われている場合。
c) 温度が−10 ℃以下又は35 ℃以上の場合。
d) 風速が8 m/sを超える場合。
なお,風速が1 m/sを超えるときは,マイクロホンに風防を付けて用い,その影響を校正時に適宜補正
する。
6
A特性時間平均音圧レベルの測定
6.1
半球測定表面の寸法
試験測定に用いる測定表面は,半球とする。測定半径は,附属書Aに規定する機械の基本寸法lによっ
て定める。
測定半径は,次による。
− 供試機械の基本寸法lが1.5 m未満の場合は,4 mとする。
− 供試機械の基本寸法lが1.5 m以上,4 m未満の場合は,10 mとする。
− 供試機械の基本寸法lが4 m以上,8 m未満の場合は,16 mとする。
− 供試機械の基本寸法lが8 m以上の場合,及び測定半径が供試機械の特性音源寸法d0の2倍を上回る
場合は,16 m,18 m,20 mと続く2 m刻みの最小の値とする。
注記 特性音源寸法d0は,機械の基本寸法lをl1として扱うJIS Z 8733の定義による。
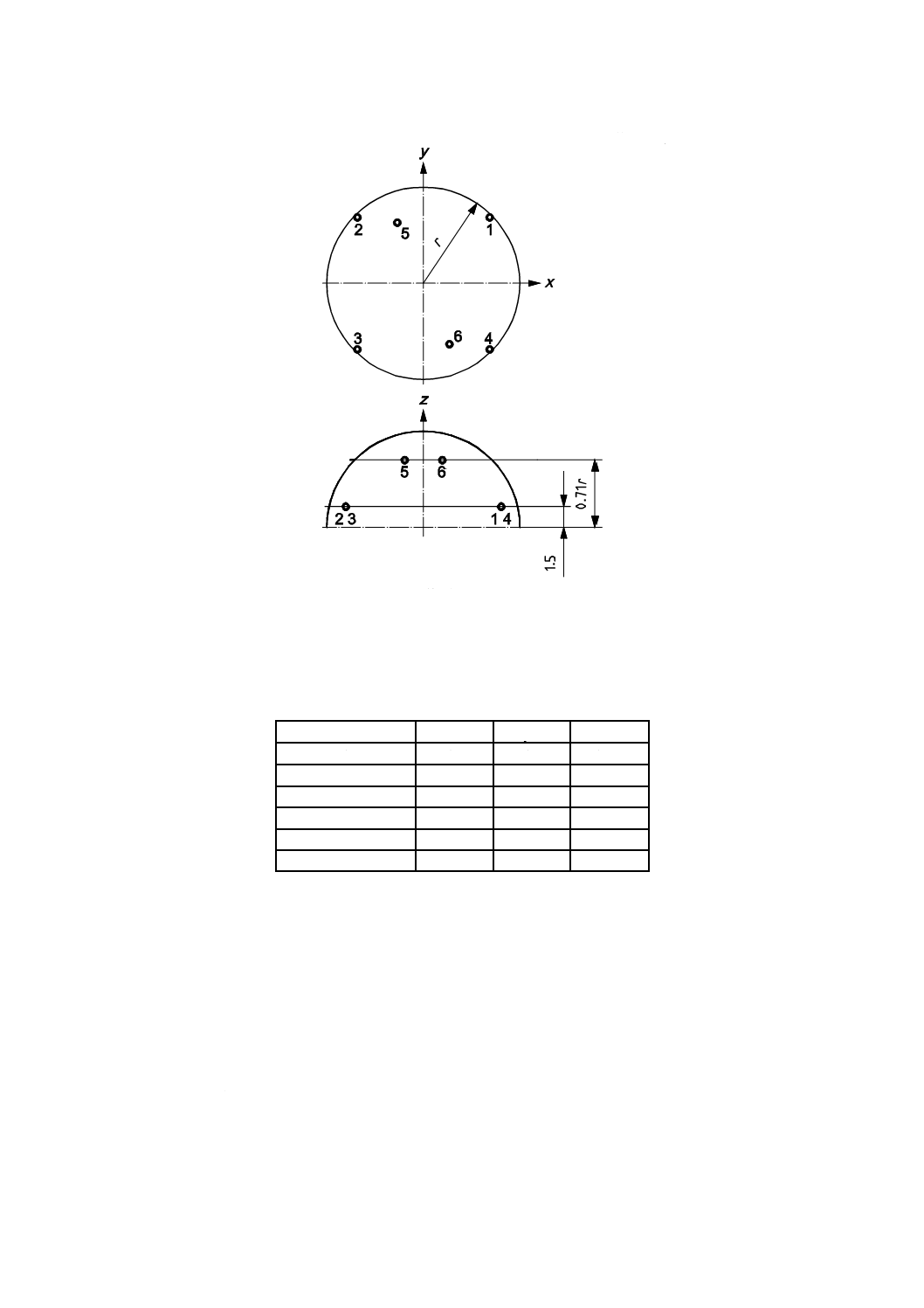
6.2
半球測定表面上のマイクロホンの位置
測定点は,6か所とする。マイクロホンの位置及びその座標は,図1及び表1による。
5
A 8317-1:2010
単位 m
1〜6
マイクロホンの位置
r
測定半径
図1−半球測定表面上のマイクロホンの配置
表1−マイクロホン位置の座標
マイクロホン位置
x/r
y/r
z
1
0.7
0.7
1.5 m
2
−0.7
0.7
1.5 m
3
−0.7
−0.7
1.5 m
4
0.7
−0.7
1.5 m
5
−0.27
0.65
0.71 r
6
0.27
−0.65
0.71 r
6.3
機械の配置
6.3.0
一般
機械の形式によって次の条件で測定を行う。
− 走行モード
− 定置作業サイクル模擬モード
− 上記の組合せ
機械の運転及び配置は,附属書B〜附属書Lに規定する。
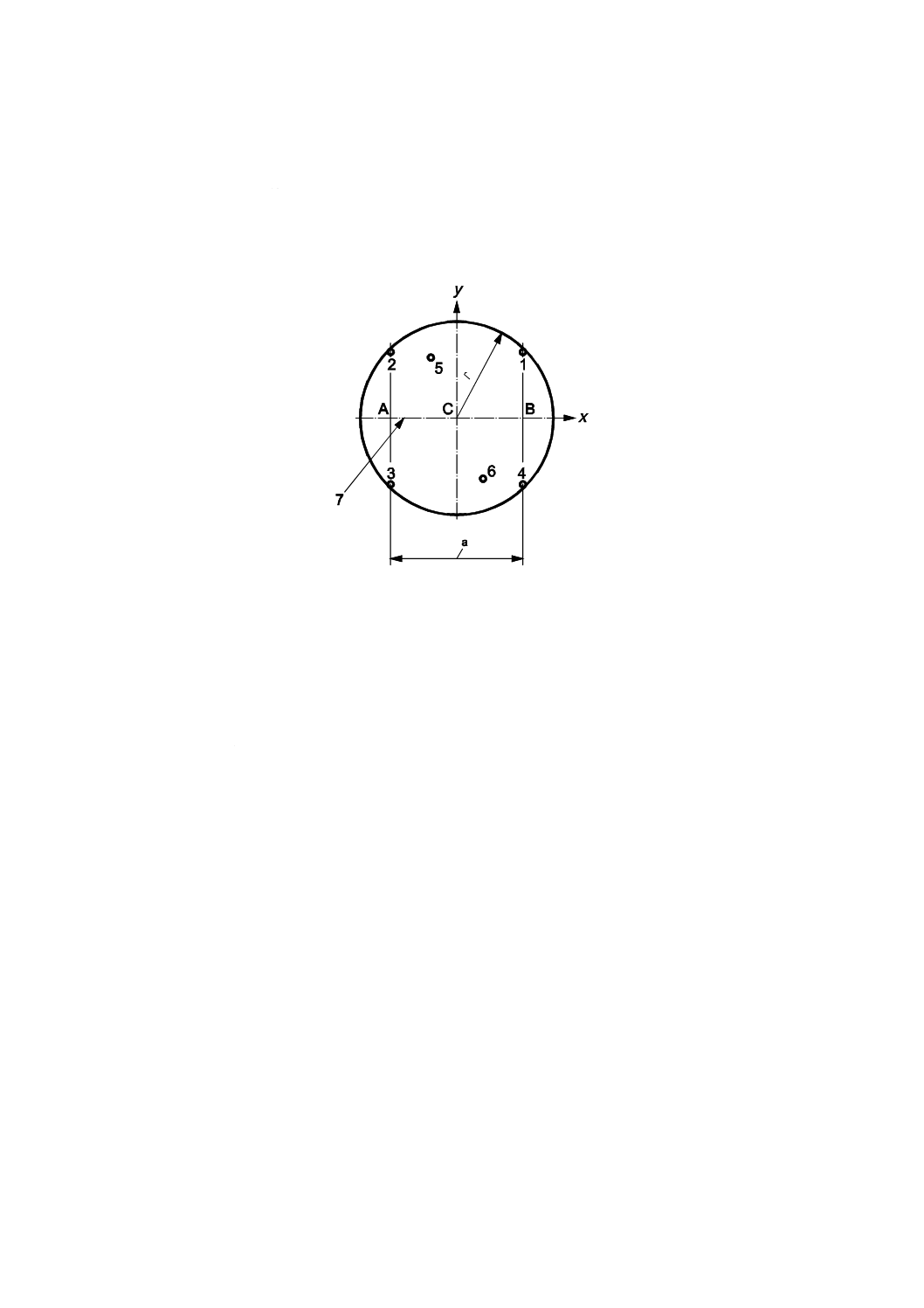
6.3.1
走行モード
機械の走行路を図2に示す。機械の走行路の中心線はx軸とし,機械の前後方向の中心をこの軸と一致
させる。走行路の長さはA点からB点までとし,測定半径の1.4倍とする。機械の前進走行モードはA点
6
A 8317-1:2010
からB点の方向とし,後進モードはB点からA点の方向とする。
6.3.2
定置作業サイクル模擬モード
機械の前後方向の中心線はx軸と一致させ,機械の前方をB点の方向に向かせる。機械の中心は,おお
よそ図2に示す半球の中心C点を通る垂線上とする。機械の運転及び配置は,附属書B〜附属書Lに規定
する。
1〜6
マイクロホンの位置
7
走行路の中心
A,B及びC
走行路上の各点
r
測定半径
a
騒音測定領域=1.4 r
図2−機械の走行路
7
機械の設定及び運転
7.1
一般
7.1.1
安全及び運転
試験中は,関係するすべての安全上の注意を守り,製造業者の取扱説明書に従う。
警笛又はバックアップアラームのようないかなる信号装置も,試験中に作動させてはならない。
7.1.2
機械の設定
機械は,製造業者が指定する作業装置(エクィップメント及びアタッチメント)を装着し,機関及び油
圧装置は,製造業者が指定する通常の作業状態となるよう暖機運転する。
すべての液体装置は,製造業者の指定する範囲に充てん(填)する。
7.2
機関回転速度
機関の回転速度は,製造業者の指定する呼び無負荷回転速度(ハイアイドル回転速度)に設定しておく。
7.3
ファン速度
機械の機関又は油圧装置に冷却ファンを備えている場合は,試験中それらを作動させる。ファン速度は,
機械の製造業者が設定する次のいずれか一つの条件による。
a) 機関直結ファン駆動 ファンを機関及び/又は油圧装置に直結して駆動する(例えば,ベルト駆動に
よって)場合には,ファンは,試験中作動させる。
7
A 8317-1:2010
b) 段階式可変速ファン駆動 ファン駆動が数段階の速度で作動できるときは,次のいずれかの条件で試
験を実施する。
− ファンの最高作動速度。
− 1回目の試験ではファンを無回転に設定し,2回目の試験ではファンを最高作動速度に設定し,双方
の試験結果を組み合わせ,式(1)を用いてA特性時間平均音圧レベルLpA,Tを計算する。
(
)dB
10
7.0
10
3.0
log
10
%
100
,
A
%
0
,
A
1.0
1.0
,
A
p
p
L
L
T
p
L
×
+
×
=
······························ (1)
ここに,
LpA, 0 %: ファン無回転時のA特性時間平均音圧レベル
LpA, 100 %: ファン最高作動速度で回転時のA特性時間平均音圧レベ
ル
c) 連続可変速ファン駆動 ファンが連続的に速度を変えて作動可能な場合は,試験を7.3 b)の条件,又
は最高作動速度の70 %以上で製造業者が設定したファン速度で実施する。
d) 複数のファンを備える機械 すべてのファンを,a),b)又はc)に規定する条件で作動させる。
7.4
機械の走行モードでの運転
機械の走行路は,6.3.1に規定し,図2に示したとおりとする。履帯式の機械では走行路を砂とし,ゴム
タイヤ車輪式の機械では5.3.2に規定する硬い反射面とする。機械の運転は,附属書B〜附属書Lの規定
による。
機械は,作業装置(エクィップメント又はアタッチメント)を走行路面上0.3 m±0.05 mの走行姿勢に
下げ,機関は,呼び無負荷回転速度(ハイアイドル回転速度)に設定して,前後進の速度を一定に保って
運転する。搭乗式の機械の場合には,前進走行速度は,履帯式及び鉄輪式の機械では,4 km/hを超えない
範囲で最もそれに近い速度とし,ゴムタイヤ車輪式の機械では,8 km/hを超えない範囲で最もそれに近い
速度とする。後進走行モードは,速度にかかわらず対応する速度段を用いる。大部分の機械では,これは
前進1速及び後進1速である。静油圧駆動の機械では,走行速度を指定速度に設定するのが困難なので,
履帯式又は鉄輪式の機械では3.5 km/hから4 km/hまで又はゴムタイヤ車輪式の機械では7 km/hから8 km/h
までを用いてもよい。ハンドガイド式の機械の場合,前進速度は6 km/hを超えてはならず,後進速度は
2.5 km/hを超えてはならない。
これらの運転モードは,半球を横切る間はいずれの方向にもノンストップで走行し,別途規定しない限
り作業装置(エクィップメント又はアタッチメント)を動かしてはならない。最低速度段の走行速度が規
定の速度より速い場合であっても,機関は,呼び無負荷回転速度(ハイアイドル回転速度)にして走行す
る。
静油圧駆動の機械では,機関は,呼び無負荷回転速度(ハイアイドル回転速度)にして,上述の規定速
度に合うように走行速度を設定する。音圧レベルは,機械の中心点が図2に示す走行路のA点とB点との
間を通過しているときだけ測定する。
運転員は,機械が試験走行路を走行中,走行路の中心線上を保つようにかじ取りの修正をするのがよい。
8.1に従って前進と後進のサイクルをそれぞれ3回ずつ実施する。
8
A特性音響パワーレベルの決定
8.1
測定手順
A特性音響パワーレベルは,JIS Z 8733によって決定する。
各機種について,附属書B〜附属書Lに規定する各運転モードで,A特性時間平均音圧レベルをすべて
8
A 8317-1:2010
のマイクロホン位置で(望ましくは同時に)少なくとも3回測定する。
これらの測定で,各機種の組合せ作業サイクル(附属書B〜附属書L参照)での音響パワーレベル(少
なくとも3値)を8.2によって計算する。
8.3の要求事項に適合させるため,作業サイクルの追加が必要となることもある。
騒音測定の実施のための指針を,附属書Mに示す。
8.2
A特性音響パワーレベルの計算
機械のA特性音響パワーレベルLWAは,式(2)によって計算する。
dB
log
10
0
A
2
A
1
,
A
A
+
−
−
=
S
S
K
K
L
L
T
p
W
··········································· (2)
ここに,
T
p
L
,
A: 半球測定表面におけるA特性時間平均音圧レベルのエネル
ギー平均値(dB)(基準音圧20 μPa)で,式(3)で表す。
dB
10
1
log
10
1
1.0
A,
A
p
=
∑
=
N
i
L
T
p
i
N
L
······················································ (3)
ここに,
LpAi: i番目のマイクロホン位置での時間平均音圧レベル
(dB,基準値20 μPa)。
N: マイクロホン位置の総数(この測定方法ではN=6)。
K1A: 暗騒音の補正値(5.4参照)
K2A: 環境による補正値(5.2及び5.3.1参照)
S: 半球測定表面の面積で,平方メートルで表す。すなわ
ち,S=2πr2かつS0=1 m2とする。
0
log
10
S
S: 測定半径4 mに対して20.0 dB,測定半径 10 mに対し
て28.0 dB,測定半径16 mに対して32.1 dB
音圧レベル及び面積の計算など途中の計算結果は,小数第1位まで表示する。
8.3
測定結果の算出
各マイクロホン位置で得られた3回分のデータ(8.1参照)を用いて,三つのA特性音響パワーレベル
の値を計算する。得られた三つの値のうち,二つの値の差が1 dB以下であれば,これ以上測定しなくても
よい。しかし,そうでない場合は,二つの差が1 dB以内になるまで測定を続ける。その差が1 dB以内と
なった値のうち,大きいほうの二つの算術平均値を,A特性音響パワーレベルの値として報告する。
9
記録事項
この規格に従って行われるすべての測定に対し,次の情報を適宜収集し,記録する。
a) 供試機械
− 機械製造業者名
− 機械形式番号
− 製造番号
− ファン駆動形式,対応する駆動形式のファン最高作動速度及び試験で使用した各ファンの速度を含
め,7.3 a),b) 又はc) の規定のうち試験に用いた方法
− 主要な作業装置(エクィップメント及びアタッチメント),機関呼び無負荷回転速度(ハイアイドル
回転速度),ファン速度,使用速度段又は車速操作方法を含む機械の設定内容
− JIS D 0006-1に規定した機関ネット出力(kW)と対応する回転速度
9
A 8317-1:2010
b) 音響環境
− 機械の配置を表すスケッチを含む試験場所及び試験場所測定地表面(半球測定表面の地上への投影
面)の種類の記述。
− 試験場所の気温,気圧,湿度及び風速
c) 測定器
− 音響測定に用いた機器の名称,形式,製造番号及び製造業者名
− 測定装置の校正方法
− 測定装置の校正日及び場所
d) 音響データ
− マイクロホン位置
− 8.1によって測定した各マイクロホン位置でのA特性時間平均音圧レベル
− 各マイクロホン位置での暗騒音のA特性時間平均音圧レベル
− 附属書B〜附属書Lに規定した各作業サイクルモードにおいて,8.2で計算した半球測定表面上のA
特性時間平均音圧レベルの平均値
− 8.2で算出し,8.3によって決定したA特性音響パワーレベルの最終値
10 報告事項
10.1 情報
次の情報を報告する。
a) 機械の製造業者名,形式番号,製造番号,機関ネット出力(JIS D 0006-1に定める定格速度での出力
kW),主要なアタッチメントを含む機械の設定,及び測定に用いた測定場所地表面の種類。
b) 8.3によって求めたA特性音響パワーレベルで,四捨五入して整数に丸めた値
c) 機械は定置し,変速機が中立のときの,機関呼び無負荷回転速度(ハイアイドル回転速度)
d) ファン駆動形式,対応する駆動形式のファン最高作動速度及び試験で使用した各ファンの速度を含め,
7.3 a),b) 又はc) の規定のうち試験に用いた方法
e) 燃料タンクの充てん量並びにもし備えていれば散水タンク及びバラスト室の充てん量
10.2 音響放射値及び不確かさの宣言
附属書Nに音響放射値及び不確かさの宣言について記載する。
10
A 8317-1:2010
附属書A
(規定)
基本寸法及び機械追加仕様
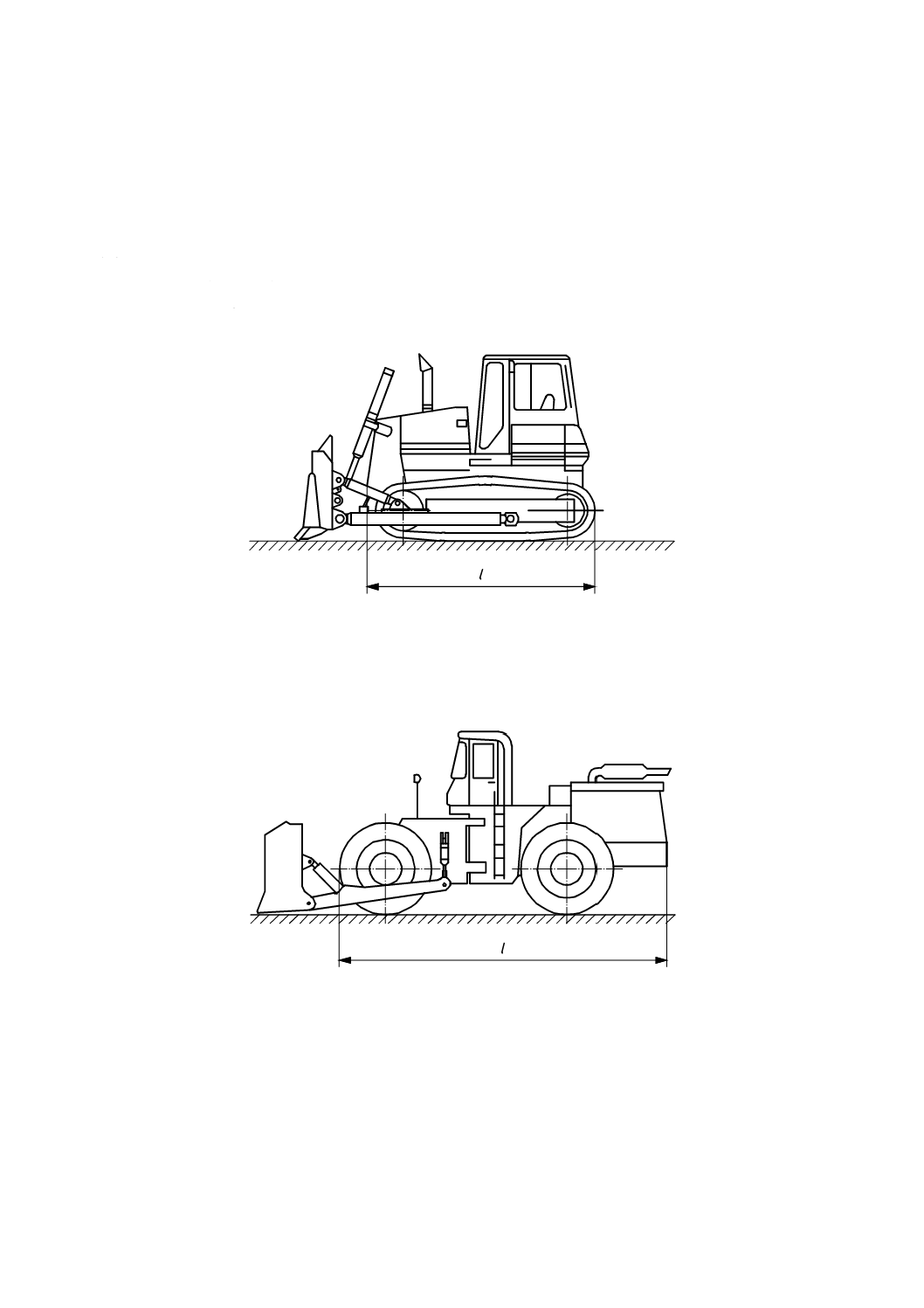
A.1 ブルドーザ
A.1.1 履帯式ブルドーザ
履帯式ブルドーザは,図A.1による。
図A.1
A.1.2 車輪式ブルドーザ
車輪式ブルドーザは,図A.2による。
図A.2
11
A 8317-1:2010
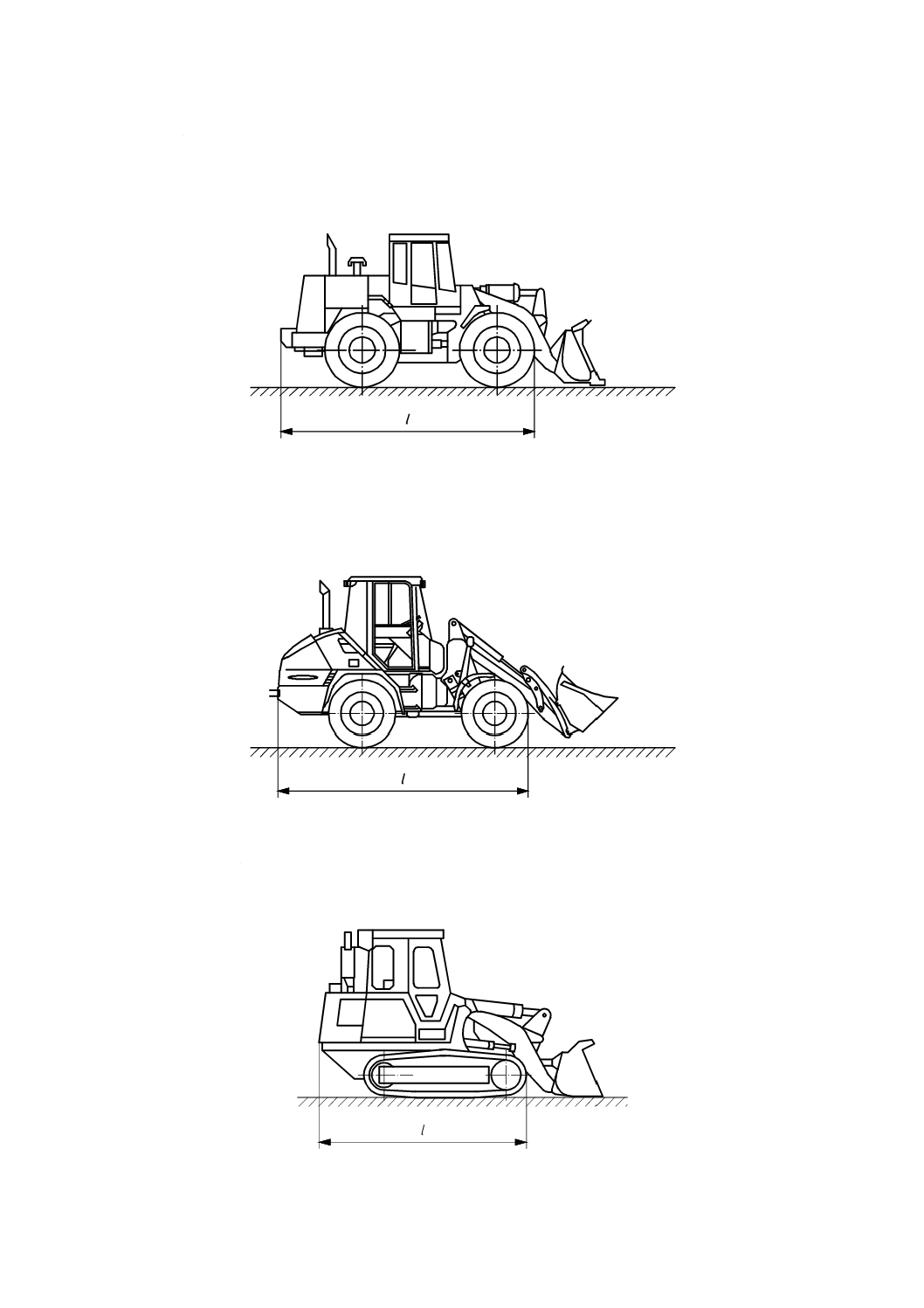
A.2 ローダ
A.2.1 ホイールローダ
運転質量4 500 kgを超えるホイールローダは,図A.3による。
図A.3
A.2.2 ミニホイールローダ
運転質量4 500 kg以下のホイールローダは,図A.4による。
図A.4
A.2.3 履帯式ローダ
履帯式ローダは,図A.5による。
図A.5
12
A 8317-1:2010
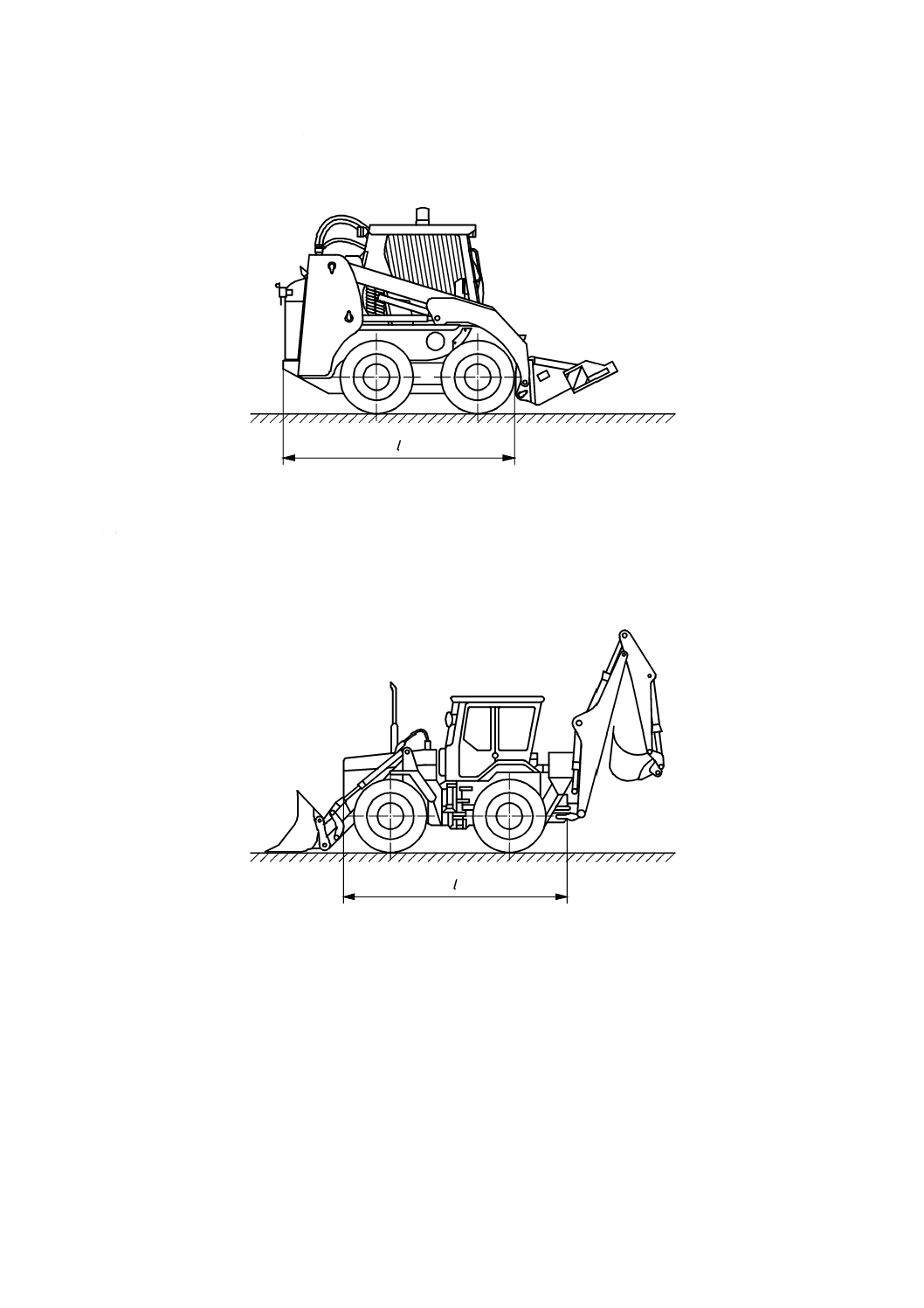
A.2.4 スキッドステアローダ
スキッドステアローダは,図A.6による。
図A.6
A.3 バックホウローダ
A.3.1 車輪式バックホウローダ
車輪式バックホウローダは,図A.7による。
図A.7
13
A 8317-1:2010
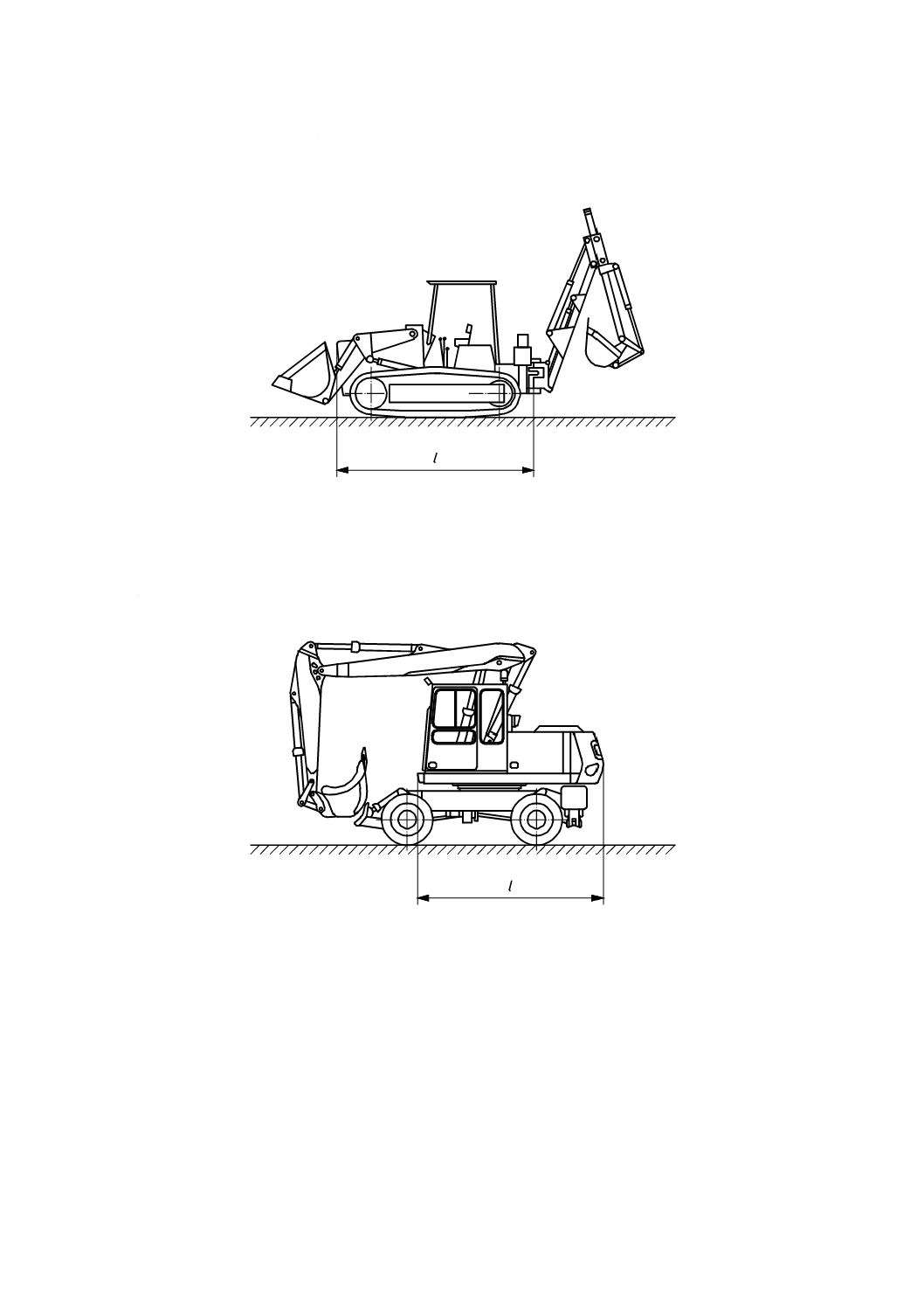
A.3.2 履帯式バックホウローダ
履帯式バックホウローダは,図A.8による。
図A.8
A.4 ショベル系掘削機
A.4.1 車輪式油圧ショベル
車輪式油圧ショベルは,図A.9による。
図A.9
14
A 8317-1:2010
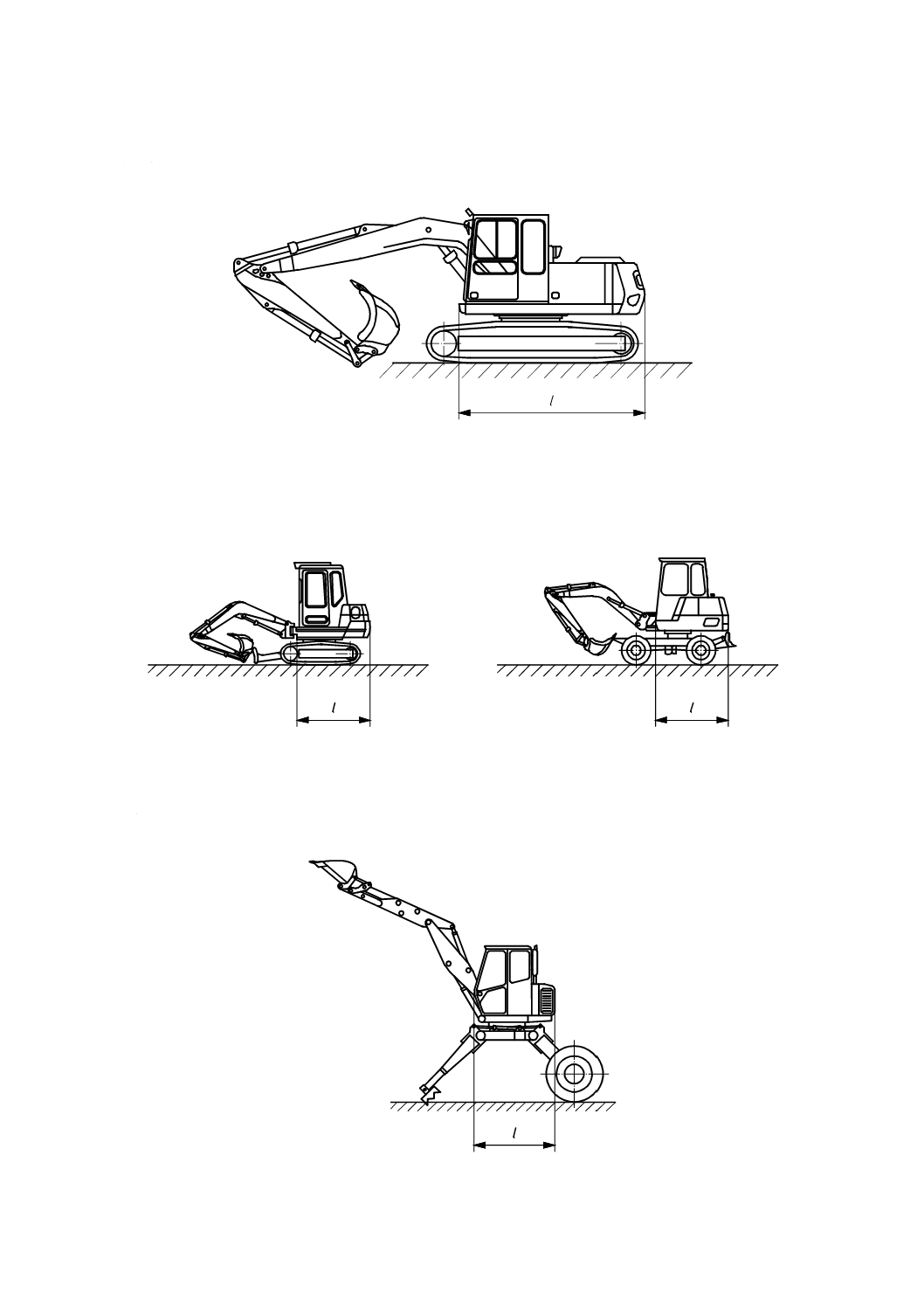
A.4.2 履帯式油圧ショベル
履帯式油圧ショベルは,図A.10による。
図A.10
A.4.3 ミニショベル
運転質量6 000 kg以下のミニショベルは,図A.11による。
a) 履帯式
b) 車輪式
図A.11
A.4.4 脚式ショベル
脚式ショベルは,図A.12による。
図A.12
15
A 8317-1:2010
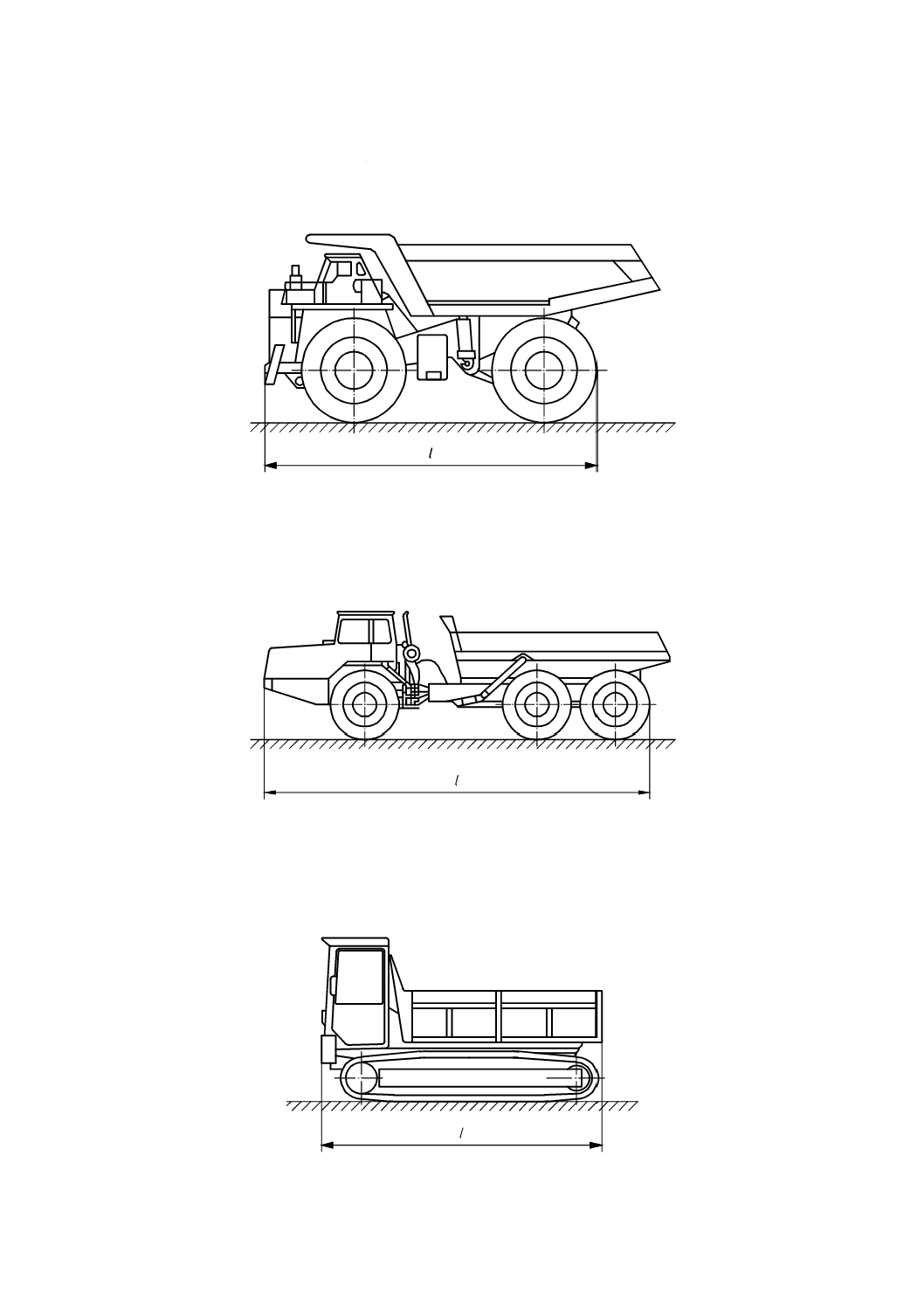
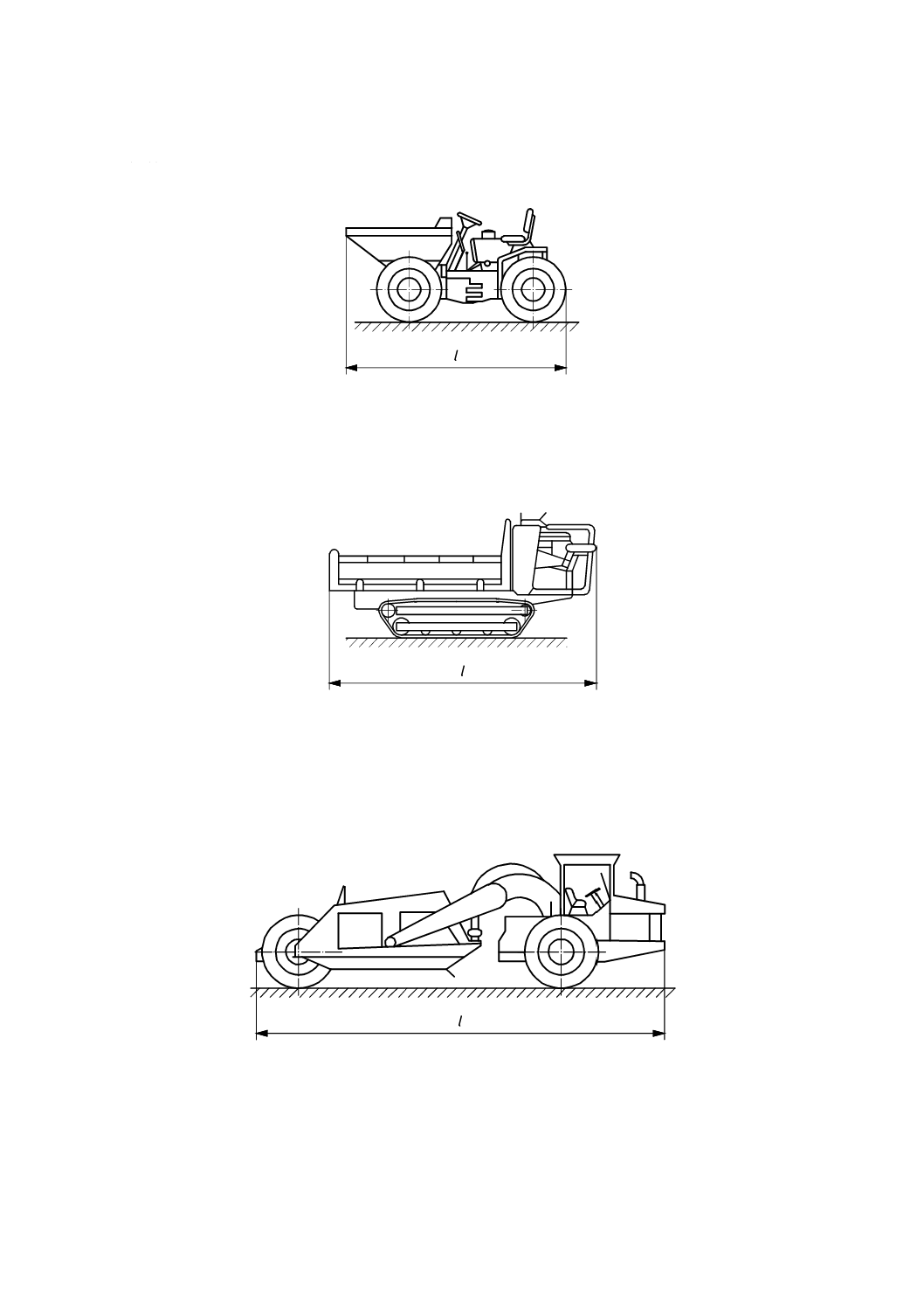
A.5 ダンパ
A.5.1 車輪式固定フレーム形重ダンプトラック
車輪式固定フレーム形重ダンプトラックは,図A.13による。
図A.13
A.5.2 車体屈折式重ダンプトラック
車体屈折式重ダンプトラックは,図A.14による。
図A.14
A.5.3 履帯式不整地運搬車
履帯式不整地運搬車は,図A.15による。
図A.15
16
A 8317-1:2010
A.5.4 車輪式ミニ不整地運搬車
運転質量4 500 kg以下の車輪式ミニ不整地運搬車は,図A.16による。
図A.16
A.5.5 履帯式ミニ不整地運搬車
運転質量4 500 kg以下の履帯式ミニ不整地運搬車は,図A.17による。
図A.17
A.6 スクレーパ
A.6.1 シングルエンジン式スクレーパ
シングルエンジン式スクレーパは,図A.18による。基本寸法lは,機械の全長とする。
図A.18
17
A 8317-1:2010
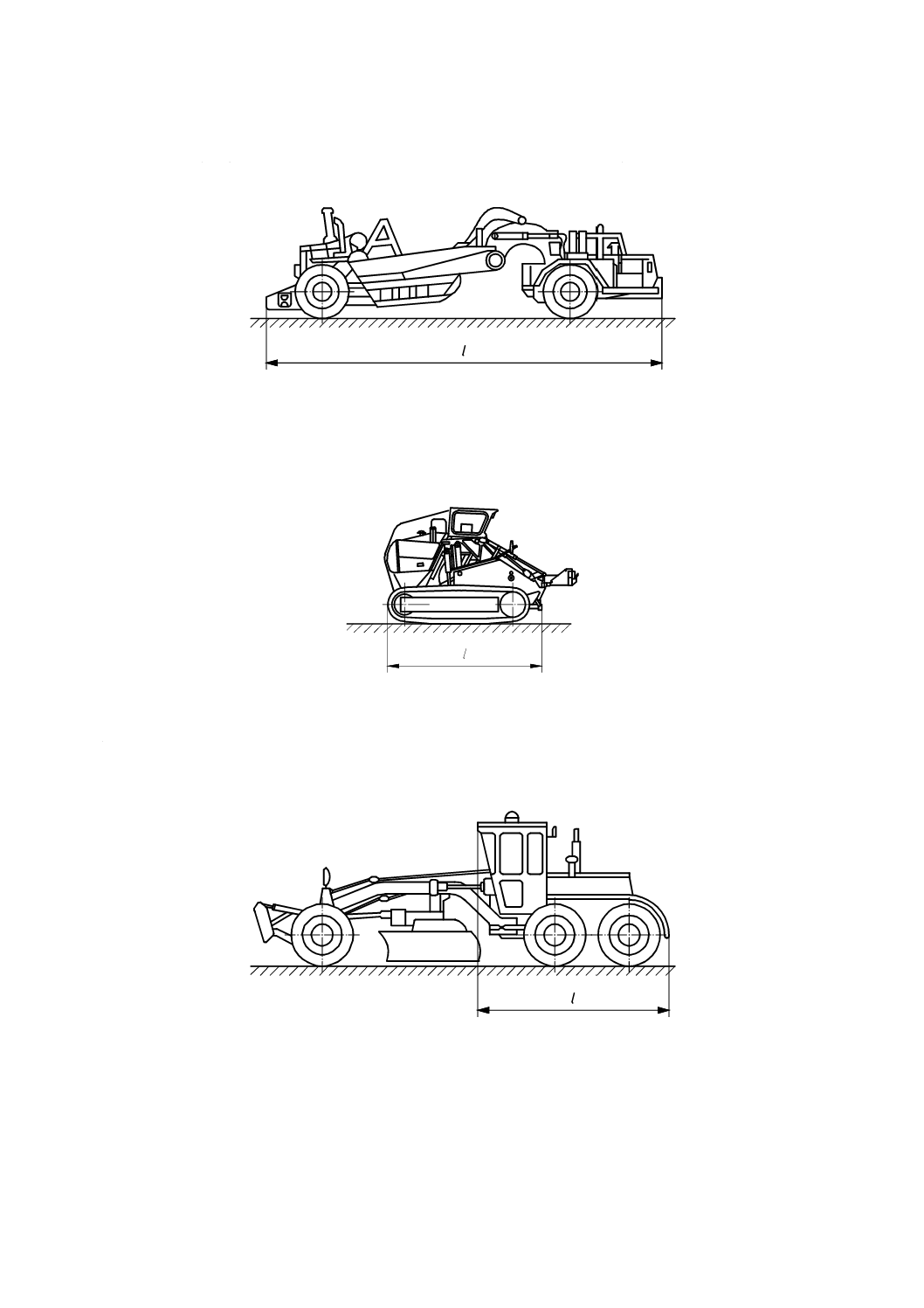
A.6.2 ツインエンジン式スクレーパ
ツインエンジン式スクレーパは,図A.19による。基本寸法lは,機械の全長とする。
図A.19
A.6.3 スクレープドーザ(履帯式スクレーパ)
スクレープドーザ(履帯式スクレーパ)は,図A.20による。
図A.20
A.7 グレーダ
グレーダは,図A.21による。
図A.21
18
A 8317-1:2010
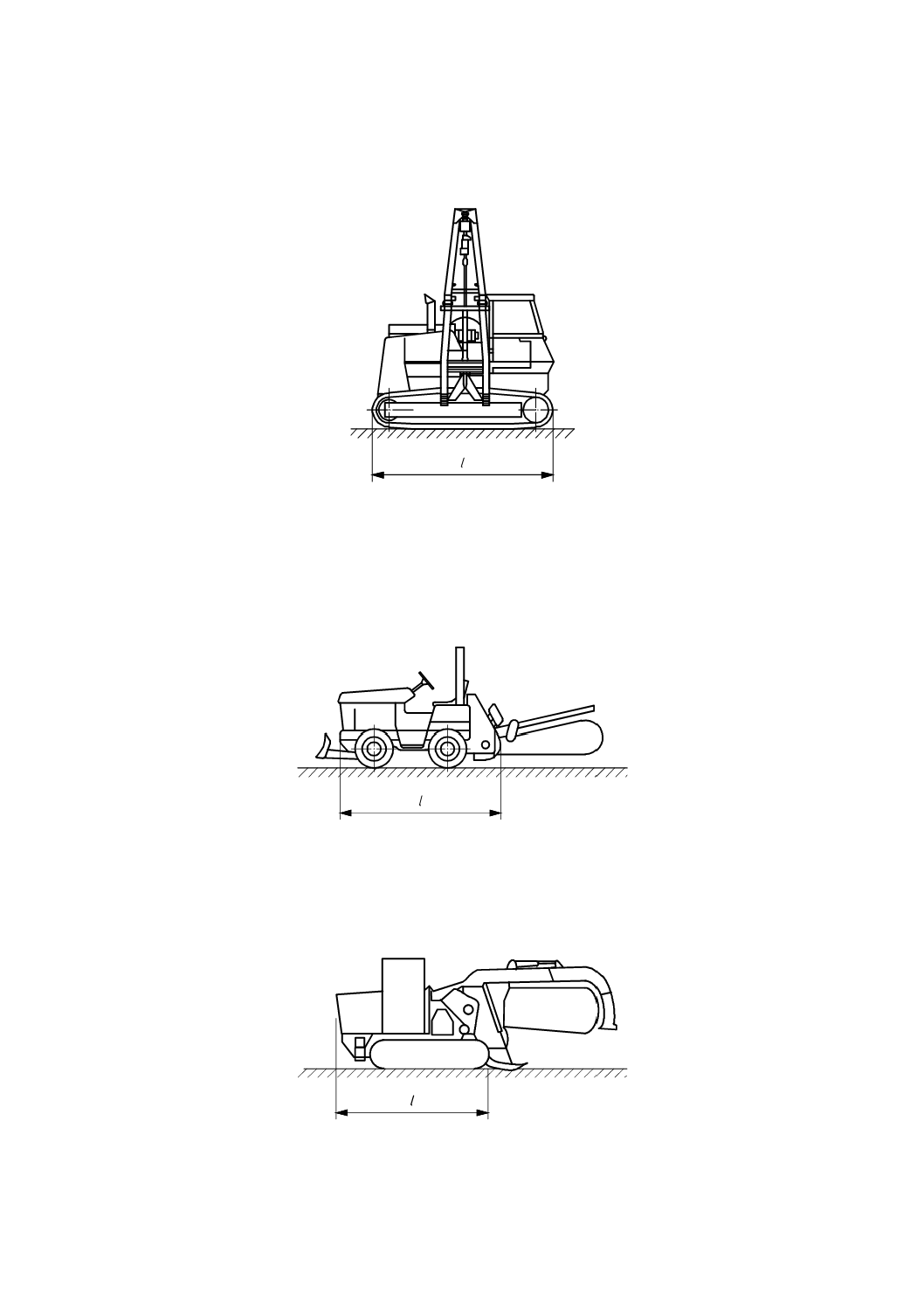
A.8 パイプレーヤ
パイプレーヤは,図A.22による。
図A.22
A.9 トレンチャ
A.9.1 搭乗形車輪式トレンチャ
搭乗形車輪式トレンチャは,図A.23による。
図A.23
A.9.2 搭乗形履帯式トレンチャ
搭乗形履帯式トレンチャは,図A.24による。
図A.24
19
A 8317-1:2010
A.9.3 ハンドガイド式トレンチャ
ハンドガイド式トレンチャは,図A.25による。
図A.25
A.9.4 ディスクトレンチャ
ディスクトレンチャは,図A.26による。
図A.26
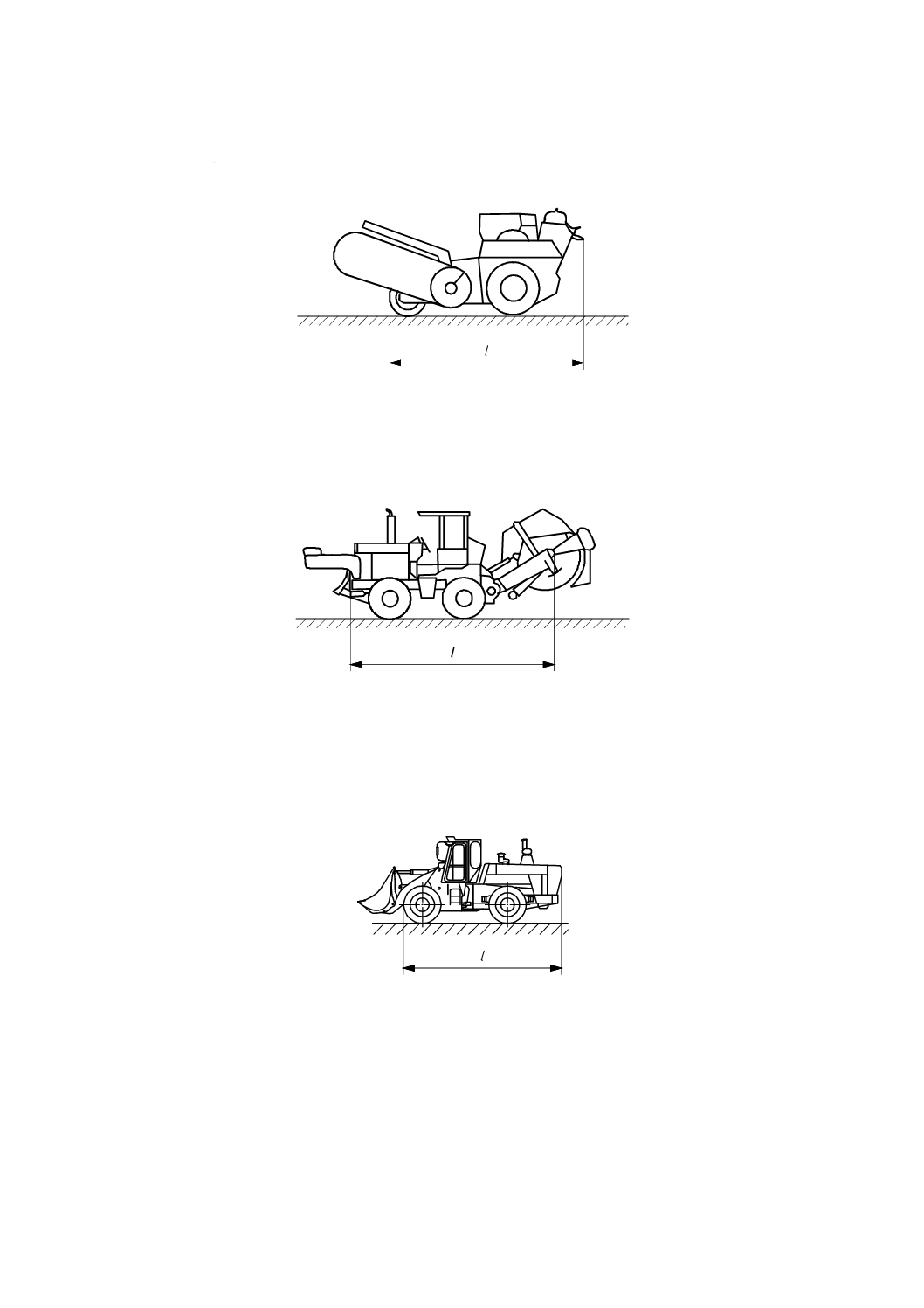
A.10 ランドフィルコンパクタ
A.10.1 積込み装置付きランドフィルコンパクタ
積込み装置付きランドフィルコンパクタは,図A.27による。
図A.27
20
A 8317-1:2010
A.10.2 排土板付きランドフィルコンパクタ
排土板付きランドフィルコンパクタは,図A.28による。
図A.28
A.11 ローラ
ローラは,図A.29による。
a) 転圧輪2輪
b) 転圧輪1輪
図A.29
21
A 8317-1:2010
附属書B
(規定)
ショベル系掘削機(油圧ショベル及び機械式ショベル)
B.1
定義
ショベル系掘削機の定義は,JIS A 8308による。
B.2
機械の配置及び測定地表面
機械の配置は,6.3.2による。ショベル系掘削機の機械中心は,上部旋回体の旋回中心である。
測定地表面は,5.3.2の規定による。
B.3
機械の設定
機械の設定は,箇条7による。すべての運転動作は,リリーフバルブが作動しないよう,ストロークエ
ンドのストッパに当てない範囲で,最大速度で行う。
B.4
機械の運転
B.4.1 基本的な機械の運転サイクル
B.4.2〜B.4.5に規定する,実際の土工を行わない(作業サイクルを模擬した)運転サイクルは,機械を
6.3.2に示すように配置して,オペレータの左側へ90°旋回して戻る動作を3回繰り返す。
各旋回動作は,x軸からy軸に至り,x軸に戻るものとする。1回の作業サイクルは,90°旋回して戻る
動作の間に,作業装置(エクィップメント及びアタッチメント)を規定の順序で作動させ,それを3回ず
つ繰り返す。
B.4.2 ホウアタッチメント
運転動作は,溝を掘削し土砂などをその側に放土する作業サイクルを模擬している。
初めにブーム,アーム及びバケットを操作して,バケットのつめ先を,地面に接することなくできるだ
け地表近くに保ち,最大掘削半径の75 %の位置に設定する。そのときのバケットは放土姿勢で,バケット
切刃が測定地表面となす角度を60°とする。
最初に,バケットつめ先を地上に沿ってブーム上げとアーム引きを同時に操作して手前に引き,最大に
引いたときのバケット刃先位置までの50 %の位置で止めてバケットを巻き込む。次いでブームを上げ,バ
ケットを巻き込みつつバケットが溝の縁を乗り越えるのに十分な高さ(最大ダンプ高さの30 %)まで上が
ったら,なおもブームを上げつつアームを伸ばしながら左側方向に90°旋回する。バケット高さが最大ダ
ンプ高さの60 %に達したら,ブーム上げは停止し,アームをシリンダストロークの75 %まで伸ばし,バ
ケットの切刃が垂直になるまでダンプする。その後右旋回し,ブームを下げ,初めの位置に戻る。
以上の動作を3回連続して繰り返し,1回の運転サイクルとする。
B.4.3 ショベルアタッチメント
運転動作は,高い壁面を掘削する作業サイクルを模擬している。
初めに,バケット切刃を地表面と平行,かつ,地上0.5 mで最大掘削半径から75 %引き込んだ位置に設
定する。
最初に,当初のバケット姿勢を保ちながら,最大掘削半径の75 %までバケットを伸ばす。次にバケット
22
A 8317-1:2010
を巻き込み又はカールしながら,最大持上げ高さの75 %及びジッパーアーム押しの75 %まで持ち上げる。
その後左側に90°旋回し,旋回終りの位置でバケットをダンプさせる。右旋回してバケットが地上0.5 m
で最大掘削半径から75 %引き込んだ初めの位置に戻る。
以上の動作を3回連続して繰り返し,1回の運転サイクルとする。
B.4.4 グラブバケットアタッチメント
運転動作は,たて穴を掘削する作業サイクルを模擬している。
初めに,グラブバケットは開いて地上0.5 mに設定する。
最初に,グラブバケットを閉じる。次にグラブバケットを最大ダンプ始め高さの半分まで持ち上げ,左
側に90°旋回する。グラブを開く。グラブバケットを下げながら旋回し,初めの位置まで戻る。
以上の動作を3回連続して繰り返し,1回の運転サイクルとする。
ミニショベルの場合は,グラブバケットの高さを地表に接しない範囲でできるだけ近づけてもよい。
B.4.5 ドラグラインアタッチメント
運転動作は,溝を層状に掘削し,溝のそばに排土する作業サイクルを模擬している。
作業サイクルの間中,ブームの角度は40°とする。バケットは,ブームの先端の真下に垂直に地上0.5 m
につるし,ドラグチェーンを地面につけない。
最初に,前記地上0.5 mの高さを保ちながら,バケットを可能な限り機械の近くまで引き寄せる。
バケットを引き寄せ終わったら,左側に90°旋回すると同時にバケットのダンプ操作をし,その後初め
の位置に戻す。
以上の動作を3回連続して繰り返し,1回の運転サイクルとする。
23
A 8317-1:2010
附属書C
(規定)
ブルドーザ(ドーザ)
C.1 定義
ブルドーザの定義は,JIS A 8308による。
C.2 機械の配置及び測定地表面
機械の配置は,6.3.1による。測定地表面は,車輪式ブルドーザについては5.3.2,履帯式ブルドーザにつ
いては5.3.3又は5.3.4による。
C.3 機械の設定
機械の設定は,箇条7による。
C.4 機械の運転
C.4.1 運転モード
機械の運転モードは,箇条7の規定による。
C.4.2 前進及び後進走行モードの組合せサイクルの計算
前進及び後進は二つの独立したモードなので,時間及び音圧レベルの両方をそれぞれの走行方向に対し
て各々測定する。
ブルドーザの組合せサイクルのA特性時間平均音圧レベルLpA,Tは,式(C.1)によって計算する。
(
)dB
10
10
1
log
10
2
,
A
1
,
A
1.0
2
1.0
1
2
1
,
A
p
p
L
L
T
p
T
T
T
T
L
×
+
×
+
=
························· (C.1)
ここに,
T1: 規定の走行路を前進走行モードで通過する時間
T2: 規定の走行路を後進走行モードで通過する時間
LpA,1及びLpA,2: 時間T1及びT2に算出した値
24
A 8317-1:2010
附属書D
(規定)
ローダ
D.1 定義
ローダの定義は,JIS A 8308による。
D.2 機械の配置及び測定地表面
機械の配置は,走行モードについては6.3.1,定置作業サイクル模擬モードについては6.3.2による。
測定地表面は,ホイールローダについては5.3.2,履帯式ローダについては5.3.3又は5.3.4による。
D.3 機械の設定
機械の設定は,箇条7による。
すべての運転動作は,リリーフバルブが作動しないよう,ストロークエンドのストッパに当てない範囲
で,最大速度で行う。
D.4 機械の運転
D.4.1 一般
運転サイクルは,走行モードと定置作業サイクル模擬モードとの組合せとする。
D.4.2 走行モード
D.4.2.1 運転モード
機械の運転モードは,箇条7による。
D.4.2.2 走行モードの計算
前進及び後進は二つの独立したモードなので,時間及び音圧レベルの両方をそれぞれの走行方向に対し
て各々測定する。組合せ走行サイクルのA特性時間平均音圧レベルLpA,3は,式(D.1)によって計算する。
(
)(
)
[
]dB
10
10
1
log
10
2
,
A
1,
A
1.0
2
1.0
1
2
1
3,
A
p
p
L
L
p
T
T
T
T
L
×
+
×
+
=
······················ (D.1)
ここに,
T1: 規定の走行路を前進走行モードで通過する時間
T2: 規定の走行路を後進走行モードで通過する時間
LpA,1及びLpA,2: 時間T1及びT2に算出した値
D.4.3 定置作業サイクル模擬モード
機関は,呼び無負荷回転速度(ハイアイドル回転速度)とし,変速機は中立位置にして運転する。バケ
ットを走行姿勢から最大持上げ高さの75 %の高さまで持ち上げ,続いて走行姿勢に戻す操作を連続して
3回行う。この一連の動作を定置作業サイクル模擬モードの1サイクルとする。
D.4.4 走行モードと定置作業サイクル模擬モードとの組合せサイクルの計算
走行モードと定置作業サイクル模擬モードとを組み合わせた全体のA特性時間平均音圧レベルLpA,Tは,
式(D.2)によって計算する。
(
)dB
10
5.0
10
5.0
log
10
4
,
A
3
,
A
1.0
1.0
,
A
p
p
L
L
T
p
L
×
+
×
=
································· (D.2)
ここに, LpA, 3: 規定の走行路における走行モードで算出した値
25
A 8317-1:2010
LpA, 4: 定置作業サイクル模擬モードで算出した値
26
A 8317-1:2010
附属書E
(規定)
バックホウローダ
E.1
定義
バックホウローダの定義は,JIS A 8308による。
E.2
機械の配置及び測定地表面
機械の配置は,走行モードについては6.3.1,定置作業サイクル模擬モードについては6.3.2による。
測定地表面は,車輪式のバックホウローダについては5.3.2,履帯式バックホウローダについては5.3.3
又は5.3.4による。
E.3
機械の設定
機械の設定は,箇条7による。
すべての運転動作は,リリーフバルブが作動しないよう,ストロークエンドのストッパに当てない範囲
で,最大速度で行う。
E.4
機械の運転
E.4.1 一般
運転サイクルは,ローダ部の走行モード及び定置作業サイクル模擬モード,並びにバックホウの作業模
擬モードの組合せである。
E.4.2 ローダ部−走行モード及び定置作業サイクル模擬モード
ローダ部の運転モードは,バックホウバケットを走行姿勢にして,D.4に規定した手順に従って行う。
E.4.3 バックホウ−作業サイクル模擬モード
バックホウ作業サイクル模擬モードは,B.4.1及びB.4.2に規定した手順に従って行う。ただし,これら
の細分箇条で規定している90°を45°に置き換える。
E.4.4 バックホウとローダ部との組合せサイクルの計算
バックホウ部とローダ部とを組み合わせた全体サイクルのA特性時間平均音圧レベルLpA,Tは,式(E.1)
によって計算する。
(
)dB
10
2.0
10
8.0
log
10
L
,
A
B
,
A
1.0
1.0
,
A
p
p
L
L
T
p
L
×
+
×
=
································ (E.1)
ここに, LpA, B: バックホウの作業サイクル模擬モードで算出した値
LpA, L: ローダ部の運転サイクル(走行モード及び定置作業サイクル
模擬モード)で算出した値
27
A 8317-1:2010
附属書F
(規定)
ダンパ(重ダンプトラック及び不整地運搬車)
F.1
定義
ダンパの定義は,JIS A 8308による。
F.2
機械の配置及び測定地表面
機械の配置は,走行モードについては6.3.1,定置作業サイクル模擬モードについては6.3.2による。
測定地表面は,車輪式のダンパについては5.3.2,履帯式ダンパについては5.3.3又は5.3.4による。
F.3
機械の設定
機械の設定は,箇条7による。
すべての運転動作は,リリーフバルブが作動しないよう,ストロークエンドのストッパに当てない範囲
で,最大速度で行う。
F.4
機械の運転
F.4.1
一般
運転サイクルは,走行モードと定置作業サイクル模擬モードとの組合せである。
F.4.2
走行モード
測定は,前進走行モードでだけ実施する。
走行速度は,7.4の規定による。7.4に規定する走行速度が実現できない場合は,1速での最高速度とす
る。
F.4.3
定置作業サイクル模擬モード
機関は,呼び無負荷回転速度(ハイアイドル回転速度)とし,変速機を中立位置にして運転する。荷台
を走行姿勢から最大ダンプ高さの75 %の高さまで持ち上げ,続いて走行姿勢に戻す操作を連続して3回行
う。この一連の動作を定置作業サイクル模擬モードの1サイクルとする。荷台を下げるのに機関出力が不
要な場合,機関は無負荷最低調整回転速度(ローアイドル回転速度)とし,変速機を中立で運転する。測
定は,荷台の排土操作なしに(空荷で)実施し,観測時間は15秒とする。
F.4.4
定置ローアイドルモード
機関は,変速機を中立位置にし,無負荷の安定した状態の無負荷最低調整回転速度(ローアイドル回転
速度)で運転する。全測定時間は15秒〜30秒の範囲とする。この一連の動作を定置ローアイドルモード
の1サイクルとする。
F.4.5
走行モード,定置作業サイクル模擬モード及び定置ローアイドルモードの組合せサイクルの計算
走行モード,定置作業サイクル模擬モード及び定置ローアイドルモードの組合せサイクルのA特性時間
平均音圧レベルLpA,Tは,式(F.1)によって計算する。
(
)dB
10
15
.0
10
05
.0
10
8.0
log
10
3
,
A
2
,
A
1
,
A
1.0
1.0
1.0
,
A
p
p
p
L
L
L
T
p
L
×
+
×
+
×
=
············· (F.1)
ここに, LpA, 1: 規定の走行路における走行モードで算出した値
28
A 8317-1:2010
LpA, 2: 定置作業サイクル模擬モードで算出した値
LpA, 3: 定置ローアイドルで算出した値
29
A 8317-1:2010
附属書G
(規定)
グレーダ
G.1
定義
グレーダの定義は,JIS A 8308による。
G.2
機械の配置及び測定地表面
機械の配置は,6.3.1による。測定地表面は,5.3.2による。
G.3
機械の設定
機械の設定は,箇条7による。
G.4
機械の運転
測定は,前進走行モードだけで実施する。
走行速度は,箇条7による。
30
A 8317-1:2010
附属書H
(規定)
ランドフィルコンパクタ
H.1 定義
ランドフィルコンパクタの定義は,JIS A 8308による。
H.2 機械の配置及び測定地表面
機械の配置は,6.3.1による。測定地表面は,5.3.2又は5.3.3による。
H.3 機械の設定
機械の設定は,箇条7による。
運転手順を簡素化するため,ランドフィルコンパクタは,硬い地表面での試験が可能となるように,ゴ
ムタイヤに履き替えて試験してもよい。鉄輪を装着して試験を実施する場合は,5.3.3又は5.3.4に規定し
た測定地表面を使うのがよい。
H.4 機械の運転
H.4.1 一般
機械の運転モードは,箇条7による。
7.4に規定した走行速度が実現できない場合は,1速での最高速度とするのがよい。
H.4.2 走行モードの計算
前進及び後進は二つの独立したモードなので,時間及び音圧レベルの両方をそれぞれの走行方向に対し
て各々測定する。
ランドフィルコンパクタの組合せ走行サイクルのA特性時間平均音圧レベルLpA,Tは,式(H.1)によって
計算する。
(
)dB
10
10
1
log
10
2
,
A
1
,
A
1.0
2
1.0
1
2
1
,
A
p
p
L
L
T
p
T
T
T
T
L
×
+
×
+
=
·························· (H.1)
ここに,
T1: 規定の走行路を前進走行モードで通過する時間
T2: 規定の走行路を後進走行モードで通過する時間
LpA,1及びLpA,2: 時間T1及びT2に算出した値
31
A 8317-1:2010
附属書I
(規定)
トレンチャ
I.1
定義
トレンチャの定義は,JIS A 8308による。
I.2
機械の配置及び測定地表面
機械の配置は,6.3.2による。
測定地表面は,5.3.2による。
I.3
機械の設定
機械の設定は,箇条7による。
掘削チェーン式トレンチャのブームは,水平位置とする。
トレンチャのホイールディスクは,可能な限り地面近くに設置する。
I.4
機械の運転
I.4.1
掘削チェーン式トレンチャの定置作業サイクル模擬モード
掘削チェーンを回転させる駆動機構を,掘削チェーンを外した後に,推奨最高運転速度で運転する。
全測定時間は15秒〜30秒の範囲とし,この一連の運転動作を1サイクルとする。
I.4.2
ホイールディスク式トレンチャの作業サイクル模擬モード
ホイールディスクは,無負荷で,推奨最高運転速度で運転する。
全測定時間は15秒〜30秒の範囲とし,この一連の運転動作を1サイクルとする。
32
A 8317-1:2010
附属書J
(規定)
スクレーパ
J.1
定義
スクレーパの定義は,JIS A 8308による。
J.2
機械の配置及び測定地表面
機械の配置は,走行モードについては6.3.1,定置作業サイクル模擬モードについては6.3.2による。
測定地表面は,車輪式のスクレーパについては5.3.2,履帯式スクレーパについては5.3.3又は5.3.4によ
る。
J.3
機械の設定
機械の設定は,箇条7による。
すべての運転動作は,リリーフバルブが作動しないよう,ストロークエンドのストッパに当てない範囲
で,最大速度で行う。
J.4
機械の運転
J.4.1
一般
運転サイクルは,走行モードと定置作業サイクル模擬モードとの組合せである。
J.4.2
走行モード
機械の運転は,箇条7の規定によって,前進走行モードだけで実施する。
ツインエンジン式スクレーパでは,両方の機関とも呼び無負荷回転速度(ハイアイドル回転速度)で運
転する。
J.4.3
定置作業サイクル模擬モード
J.4.3.1
エレベーティング装置のないスクレーパ
機関は,呼び無負荷回転速度(ハイアイドル回転速度)とし,変速機を中立位置にして運転する。
エジェクタをストロークエンドのストッパに当てない範囲で後方位置から前方位置に移動させ,再び後
方位置に戻す操作を連続して3回行う。
この一連の動作を定置作業サイクル模擬モードの1サイクルとする。
J.4.3.2
エレベーティング装置付きスクレーパ
機関は,呼び無負荷回転速度(ハイアイドル回転速度)とし,変速機は中立位置にして運転する。
エレベーティング装置は,その最高速度の50 %で運転する。
全測定時間は15秒〜30秒の範囲とし,これを定置作業サイクル模擬モードの1サイクルとする。
J.4.4
走行モードと定置作業サイクル模擬モードとの組合せサイクルの計算
走行モードと定置作業サイクル模擬モードとの組合せサイクルのA特性時間平均音圧レベルLpA,Tは,
式(J.1)によって計算する。
(
)dB
10
1.0
10
9.0
log
10
4,
A
3,
A
1.0
1.0
,
A
p
p
L
L
T
p
L
×
+
×
=
·································· (J.1)
33
A 8317-1:2010
ここに, LpA, 3: 規定の走行路における走行モードで算出した値
LpA, 4: 定置作業サイクル模擬モードで算出した値
34
A 8317-1:2010
附属書K
(規定)
パイプレーヤ
K.1 定義
パイプレーヤの定義は,JIS A 8308による。
K.2 機械の配置及び測定地表面
機械の配置は,6.3.2による。
測定地表面は,車輪式のパイプレーヤについては5.3.2,履帯式パイプレーヤについては5.3.3又は5.3.4
による。
K.3 機械の設定
機械の設定は,箇条7による。
K.4 機械の運転
K.4.1 一般
パイプレーヤの運転サイクルは,典型的な使用例では,定置作業サイクル模擬モードだけである。
K.4.2 ブームモード
ブームをストロークエンドのストッパに当てない範囲で許容最低限位置から最高持上げ位置まで持ち上
げ(続いて戻す),この操作を連続して3回行う。この一連の動作を1サイクルとし,そのサイクルを3回
繰り返して8.1に規定する3回の作業サイクルの要求に適合させる。
K.4.3 フック動作モード
ブームは最高持上げ位置とし,ロープの速度は低速段での最高値とする。
フックをストロークエンドのストッパに当てない範囲で地面すれすれの位置から最高持上げ位置まで持
ち上げ(続いて戻す),この操作を連続して3回行う。この一連の動作を1サイクルとし,そのサイクルを
3回繰り返して8.1に規定する3回の作業サイクルの要求に適合させる。
K.4.4 ローアイドルモード
機関は,無負荷の安定した状態の無負荷最低調整回転速度(ローアイドル回転速度)とし,変速機を中
立位置にして運転する。全測定時間は15秒〜30秒の範囲とする。この一連の動作を定置のローアイドル
モードの1サイクルとする。
K.4.5 定置作業サイクル模擬モードの組合せサイクルの計算
定置作業サイクル模擬モードの組合せサイクルのA特性時間平均音圧レベルLpA,Tは,式(K.1)によって
計算する。
(
)dB
10
6.0
10
2.0
10
2.0
log
10
3
,
A
2
,
A
1
,
A
1.0
1.0
1.0
,
A
p
p
p
L
L
L
T
p
L
×
+
×
+
×
=
·············· (K.1)
ここに, LpA, 1: ブームモードで算出した値
LpA, 2: フックモードで算出した値
LpA, 3: ローアイドルモードで算出した値
35
A 8317-1:2010
附属書L
(規定)
ローラ
L.1
定義
ローラの定義は,JIS A 8308による。
この附属書を,ハンドガイド式及び遠隔操縦式ローラのA特性音響パワーレベルの決定に用いてもよい。
L.2
搭乗式振動ローラ
L.2.1 機械の配置及び測定地表面
機械の配置は,6.3.2による。
振動ローラを単一又は複数の空気クッションのような適切な弾性部材の上に置く。空気クッションの場
合は,エラストマ又は同様の柔軟な材料製で,共振を避けるため,機械を少なくとも50 mmまで確実に持
ち上げられるような圧力にふくらませておく。クッションの寸法は,試験中の機械を安定して確実に支え
るものでなければならない。
測定地表面の表面は,5.3.2による。
L.2.2 機械の設定
機械の設定は,7.1〜7.3による。
L.2.3 機械の運転
機械は,定置状態とし,機関を(製造業者の指定する)定格速度として,走行機構を遮断して試験する。
締固め機構を製造業者の公表する最高周波数とその周波数での最高振幅との組合せに対応する最大の締固
め力で運転する。
観測時間は15秒以上とし,この動作を1サイクルとする。そのサイクルを3回繰り返して8.1に規定す
る3回の作業サイクルの要求に適合させる。
L.3
静的ローラ
L.3.1 測定地表面及び機械の配置
機械の配置は,ISO 6393:2008の6.3.1による。
測定地表面は,ドラムに突起のある静的ローラについては5.3.2又は5.3.3による。
L.3.2 機械の設定
機械の設定は,ISO 6393:2008の箇条7による。
L.3.3 機械の運転
機械の運転モードは,ISO 6393:2008の7.1.3に規定する静的モードとする。
L.3.4 A特性音響パワーレベルの決定
A特性音響パワーレベルは,ISO 6393:2008の箇条8によって決定する。
36
A 8317-1:2010
附属書M
(参考)
土工機械が発生するA特性音響パワーレベルの測定−
動的試験条件に関する追加指針
M.1 目的
この附属書に詳述する指針は,評価試験者に合理的な自由度を与えるために,規格本文では規定しなか
った分野において,特定の推奨方法を示すことによって,試験サイクルでの変動を減らすのに役立てるた
めのものである。この指針は,規格の本体に規定する試験方法の補足として,不慣れな運転員に,より明
確な指針を提供するためのものである。
M.2 測定手順(8.1)の説明
6.2に示すように,測定箇所は6か所ある。偏差を最小限とするため,測定器は6セットを使用し,試験
員は2名,運転員は1名とするのがよい。公式な認定のための最小限の配置としては,常に最小限,3セ
ットの測定器,1名の試験員及び1名の運転員が必要である。測定機器は,多重スイッチ又は延長ケーブ
ルを備えて,全部のメータを同時にオンオフできるようにするか,又はサウンドレベルメータ(騒音計)
の数に対応する試験員を用意する。
3か所の測定位置は,それぞれの運転サイクルの間中で,機械の片側を測定するよう設定する。機械の
反対側を測定するときは,機械の向きを変えるか,又はマイクロホンを反対側に移動する。
肝心な点として,機械の運転員又は測定器の取扱者のいずれかが,機械が測定区間の始点と終点との間
にいることを知らせる前もって取り決めた簡単で分かりやすい手信号を用いるようにすることである。
この手順が,積分形サウンドレベルメータ(騒音計),又はA特性時間平均音圧レベルを測定できる測
定器を必要とすることを理解することが重要である。上記以外の,それぞれの運転サイクル中に個々の読
みを何回も必要とするような方法は,許されない。
箇条8は,最終的な計算をするために,何のデータが必要かを非常に明確に示している。
それぞれの測定位置での再現性のある読みを得ることの主な目的は,最終の計算をしたときにA特性音
響パワーレベルの数値間に幅広い相違が生じ,試験サイクルの全体を繰り返さなくてはならなくなるよう
な事態を避けることである。最小限3回の測定を行い,そのうち2回の測定結果の差が1 dB以内とする方
法は,異なった日に,又は同形式の(別の)機械で試験を繰り返すことができ,かつ,同等の有意の結果
が得られる妥当な方法である。
37
A 8317-1:2010
附属書N
(参考)
音響放射値及び不確かさの宣言
例えば,規制の要求に適合するため,音響放射値のデータ及び不確かさの宣言を行うときは,次の事項
を配慮するのがよい。
測定の不確かさ及びある形式の量産機械の生産時のばらつきは,A特性音響パワーレベルの値を決定す
るときに考慮するのがよい。
測定したA特性音響パワーレベルの再現性の標準偏差の最大値は,JIS Z 8733:2000の表1に基づいて
1.5 dBとするのがよい。再現性の標準偏差の定義は,ISO 4871:1996の3.21による(同一の騒音発生源の
同一の騒音放射決定方法による別の時期及び別の条件下における再現試験での差異)。
音響放射値の宣言についての指針は,ISO 4871:1996の附属書Aによるのがよい。
A特性音響パワーレベル及び対応する不確かさの値は,ISO 4871:1996のB.2に例示するように別々に宣
言するのがよい(音響放射値の二値の宣言)。また,他の宣言方法を用いることもできる。
注記1 A特性音響パワーレベルの再現性の標準偏差は,近年の経験では,0.5 dB〜0.8 dBを示して
いる。
注記2 ISO 4871:1996の3.24に規定した標準偏差参照値σM(土工機械については,各機種の各生産
単位について典型と考えられる値で,その機種に対して指定する。)は,ISO 4871:1996の表
A.1の推定値σMよりも大幅に低いことが経験で分かっている。近年の信頼すべきデータによ
れば,土工機械のA特性音響パワーレベルの標準偏差参照値は,おおよそ1.0 dB程度である,
注記3 注記1及び注記2の情報は,EU規制(例えば,指令2000/14/EC)による経験に基づく。
参考文献 [1] ISO 4871:1996,Acoustics−Declaration and verification of noise emission values of machinery
and equipment
[2] ISO 6394,Earth-moving machinery−Determination of emission sound pressure level at operator's
position−Stationary test conditions
[3] JIS A 8317-2 土工機械−運転員位置における放射音圧レベルの決定−動的試験条件
注記 対応国際規格:ISO 6396,Earth-moving machinery−Determination of emission sound
pressure level at operator's position−Dynamic test conditions(MOD)
[4] Directive 2000/14/EC of the European Parliament and of the Council of 8 May 2000 on the
approximation of the laws of the Member States relating to the noise emission in the environment
by equipment for use outdoors
附属書JA
(参考)
JISと対応国際規格との対比表
JIS A 8317-1:2010 土工機械−音響パワーレベルの決定−動的試験条件
ISO 6395:2008 Earth-moving machinery−Determination of sound power level−Dynamic
test conditions
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇
条ごとの評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲
適用範囲を規定
1
JISに同じ。
一致
−
−
2 引用規格
3 用語及び
定義
用語を定義
3
JISに同じ。
一致
−
−
4 測定器
測定器を規定
4
JISに同じ。
一致
−
−
5 試験環境
試験環境を規定
5
JISに同じ。
一致
−
−
6 A特性時間
平均音圧レ
ベルの測定
A特性時間平均音圧レベ
ルの測定について規定
6
JISに同じ。
一致
−
−
7 機械の設
定及び運転
機械の設定及び運転につ
いて規定
7
JISに同じ。
一致
−
−
8 A特性音響
パワーレベ
ルの決定
A特性音響パワーレベル
の決定方法を規定
8
JISに同じ。
一致
−
−
9 記録事項
記録事項を規定
9
JISに同じ。
一致
−
−
10 報告事項 報告事項を規定
10
10.2以外はJISに同
じ。
変更
JISでは10.2を参考記載とし
ている。
附属書Nを参考に修正したことに
よる変更
附属書A
(規定)
各機種ごとの基本寸法l及
び機械追加仕様を規定
Annex A
(Normative)
JISに同じ。
一致
−
−
附属書B
(規定)
ショベル系掘削機の音響
測定について規定
Annex B
(Normative)
B.4.2以外はJISに同
じ。
変更
−
−
2
A
8
3
1
7
-1
:
2
0
1
0
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇
条ごとの評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
B.4.2
ホウアタッチメントの場
合の機械の運転について
規定
B.4.2
機械を試験開始位置
に戻す動作で,JISに
はないバケットの巻
込みを規定。
変更
JISでは,試験の実情に基づ
き,機械を試験開始位置に戻
す動作でのバケット巻込みを
削除。
ISO規格の規定は誤記と考えられ
るので,今後ISOに誤記訂正を求
めていく。
附属書C
(規定)
ブルドーザの音響測定に
ついて規定
Annex C
(Normative)
JISに同じ。
一致
−
−
附属書D
(規定)
ローダの音響測定につい
て規定
Annex D
(Normative)
JISに同じ。
一致
−
−
附属書E
(規定)
バックホウローダの音響
測定について規定
Annex E
(Normative)
JISに同じ。
一致
−
−
附属書F
(規定)
ダンパの音響測定につい
て規定
Annex F
(Normative)
JISに同じ。
一致
−
−
附属書G
(規定)
グレーダの音響測定につ
いて規定
Annex G
(Normative)
JISに同じ。
一致
−
−
附属書H
(規定)
ランドフィルコンパクタ
の音響測定について規定
Annex H
(Normative)
JISに同じ。
一致
−
−
附属書I
(規定)
トレンチャの音響測定に
ついて規定
Annex I
(Normative)
JISに同じ。
一致
−
−
附属書J
(規定)
スクレーパの音響測定に
ついて規定
Annex J
(Normative)
JISに同じ。
一致
−
−
附属書K
(規定)
パイプレーヤの音響測定
について規定
Annex K
(Normative)
JISに同じ。
一致
−
−
附属書L
(規定)
ローラの音響測定につい
て規定
Annex L
(Normative)
JISに同じ。
一致
−
−
附属書M
(参考)
音響パワーレベルの測定
の際の動的試験条件に関
する追加指針を記述
Annex M
(Informative)
JISに同じ。
一致
−
−
2
A
8
3
1
7
-1
:
2
0
1
0
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇
条ごとの評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
附属書N
(参考)
音響放射値及び不確かさ
の宣言について記述
Annex N
(Normative)
JISでは参考である
が,ISO規格は
Normative(規定)。
変更
ISO 6395:2008では附属書Nは
Normative(規定)であるがJIS
では右記理由から(参考)と
している。
ISO 6395:2008 Annex Nに述べられ
ている現在の土工機械のA特性音
響パワーレベルの標準偏差がおよ
そ1 dBであるというのは,現時点
での経験値であって,普遍性はな
く,それらを含めNormativeで扱う
のは合理的ではない。
この点から日本としては再度この
附属書Nを規定から参考に変更す
るよう各国に働きかけてゆく。
JISと国際規格との対応の程度の全体評価:ISO 6395:2008,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 一致 ················技術的差異がない。
− 変更 ················国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ···············国際規格を修正している。
2
A
8
3
1
7
-1
:
2
0
1
0