A 8311:2018 (ISO 5006:2017)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 基本寸法························································································································· 5
4.1 光源間隔寸法 ················································································································ 5
4.2 遮影寸法 ······················································································································ 5
4.3 測定のための基準寸法 ···································································································· 5
5 測定用機器 ······················································································································ 5
6 測定機械の構成 ················································································································ 6
7 間接視界の性能基準 ·········································································································· 6
7.1 視覚補助装置 ················································································································ 6
7.2 表示装置の位置 ············································································································· 6
7.3 鏡の性能基準 ················································································································ 6
7.4 監視カメラの性能基準 ···································································································· 7
8 測定手順························································································································· 7
8.1 測定地表面の線引き及び測定地表面への機械の配置 ······························································ 7
8.2 測定用機器の配置 ·········································································································· 8
8.3 遮影の測定 ··················································································································· 8
9 算定方法························································································································ 11
9.1 視界測定円(VTC)又は機側長方形境界(RB)での遮影計算手順 ········································· 11
9.2 計算機による試験模擬 ··································································································· 12
10 評価方法及び性能基準 ···································································································· 12
10.1 視界測定円(VTC)上での視界性能基準 ·········································································· 12
10.2 機側長方形境界(RB)での視界性能基準 ········································································· 17
10.3 直接視界による視界性能基準を超える遮影 ······································································· 18
10.4 (表1及び表2の範囲外の)大形土工機械,派生土工機械及びほかの形式の土工機械に対する要求
事項 ·································································································································· 19
11 試験報告書 ··················································································································· 20
11.1 機械仕様 ···················································································································· 20
11.2 図面 ·························································································································· 20
12 運転取扱説明書での視界の説明 ························································································ 20
附属書A(規定)作業装置高さ(HH)及び作業装置半径(RR)の寸法及び位置並びに機側長方形境界(RB)
········································································································································ 22
A 8311:2018 (ISO 5006:2017)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
建設機械施工協会(JCMA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業
規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業
規格である。
これによって,JIS A 8311:2010は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
A 8311:2018
(ISO 5006:2017)
土工機械−運転員の視野−測定方法及び性能基準
Earth-moving machinery-Operator's field of view-
Test method and performance criteria
序文
この規格は,2017年に第2版として発行されたISO 5006を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
1
適用範囲
この規格は,機械周囲の長方形境界上及び半径12 mの視界測定円(VTC)上での運転員の視界を測定
及び評価する静的測定方法について規定する。
この規格は,着座運転席をもち,施工現場での作業及び公道走行を意図した,JIS A 8308で規定する土
工機械に適用する。この規格は,表1に記載した機種ごとに,JIS A 8320に従って最大運転質量までの機
械の視界性能基準を規定する。大形機械,派生土工機械及びほかの形式の土工機械を含め,表1に記載さ
れていない機械に対しては,10.4に規定するリスクアセスメント手順と併せて視界測定方法を適用できる。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 5006:2017,Earth-moving machinery−Operator's field of view−Test method and performance
criteria(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8308 土工機械−基本機種−用語
注記 対応国際規格:ISO 6165,Earth-moving machinery−Basic types−Identification and terms and
definitions
JIS A 8315 土工機械−運転員の身体寸法及び運転員周囲の最小空間
注記 対応国際規格:ISO 3411,Earth-moving machinery−Physical dimensions of operators and
minimum operator space envelope
JIS A 8318 土工機械−座席基準点(SIP)
注記 対応国際規格:ISO 5353,Earth-moving machinery, and tractors and machinery for agriculture and
forestry−Seat index point
JIS A 8320 土工機械−機械全体,作業装置及び構成部品の質量測定方法
2
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 対応国際規格:ISO 6016,Earth-moving machinery−Methods of measuring the masses of whole
machines, their equipment and components
JIS A 8338 土工機械−危険検知装置及び視覚補助装置−性能要求事項及び試験
注記 対応国際規格:ISO 16001,Earth-moving machinery−Hazard detection systems and visual aids−
Performance requirements and tests
JIS A 8403-1 土工機械−油圧ショベル−第1部:用語及び仕様項目
注記 対応国際規格:ISO 7135,Earth-moving machinery−Hydraulic excavators−Terminology and
commercial specifications
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS A 8308によるほか,次による。
3.1
測定地表面(test surface)
視界を測定するための基準地表面を構成する面。
3.2
光源中心点(FPCP)(filament position centrepoint)
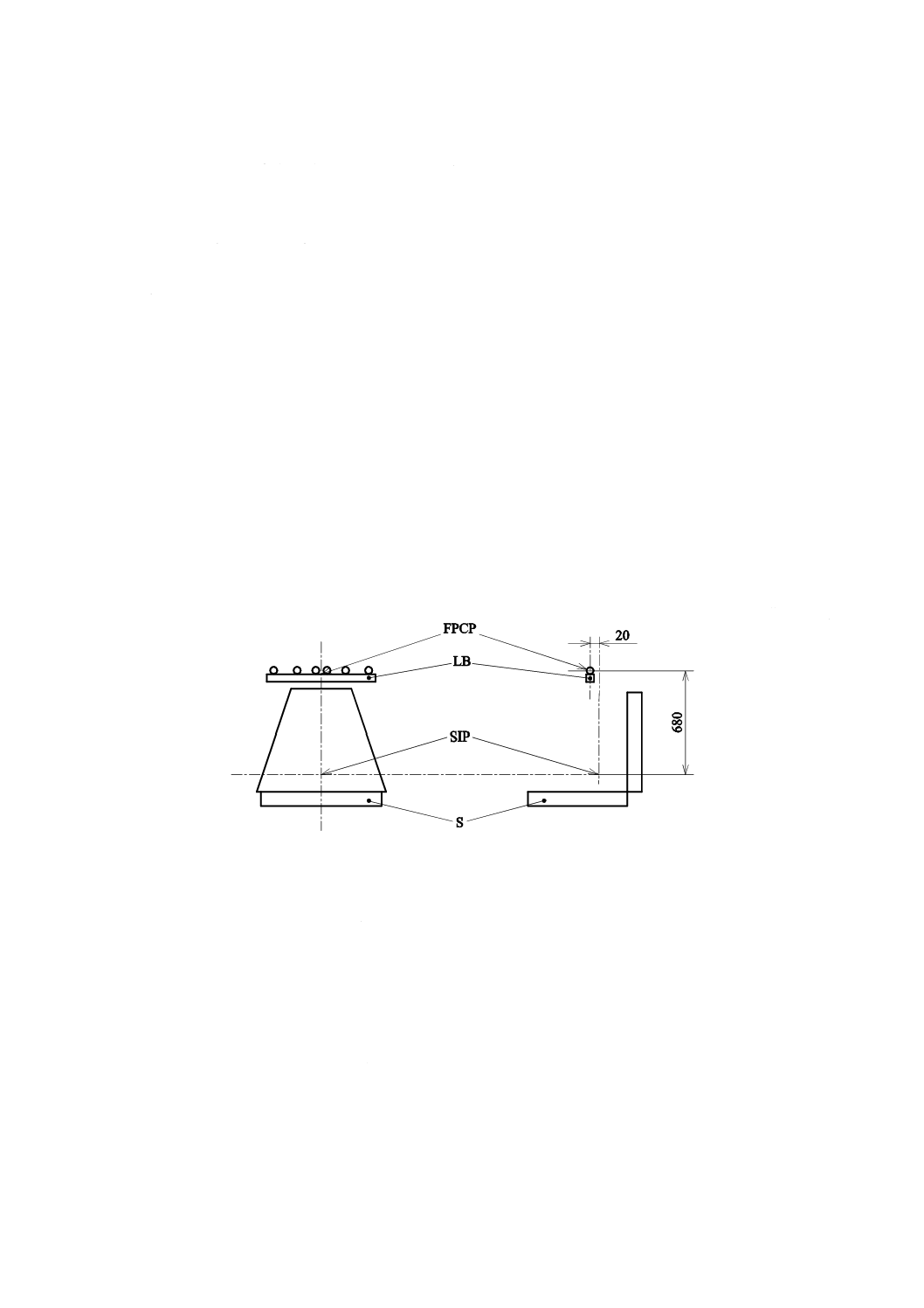
電球のフィラメント間を結ぶ線の中点で,(回転)中心とする点(図1参照)。
単位 mm
記号
LB
電球取付棒
SIP
座席基準点
S
座席
FPCP
光源中心点
図1−光源機器
3.3
視界測定領域
3.3.1
視界測定円(VTC)(visibility test circle)
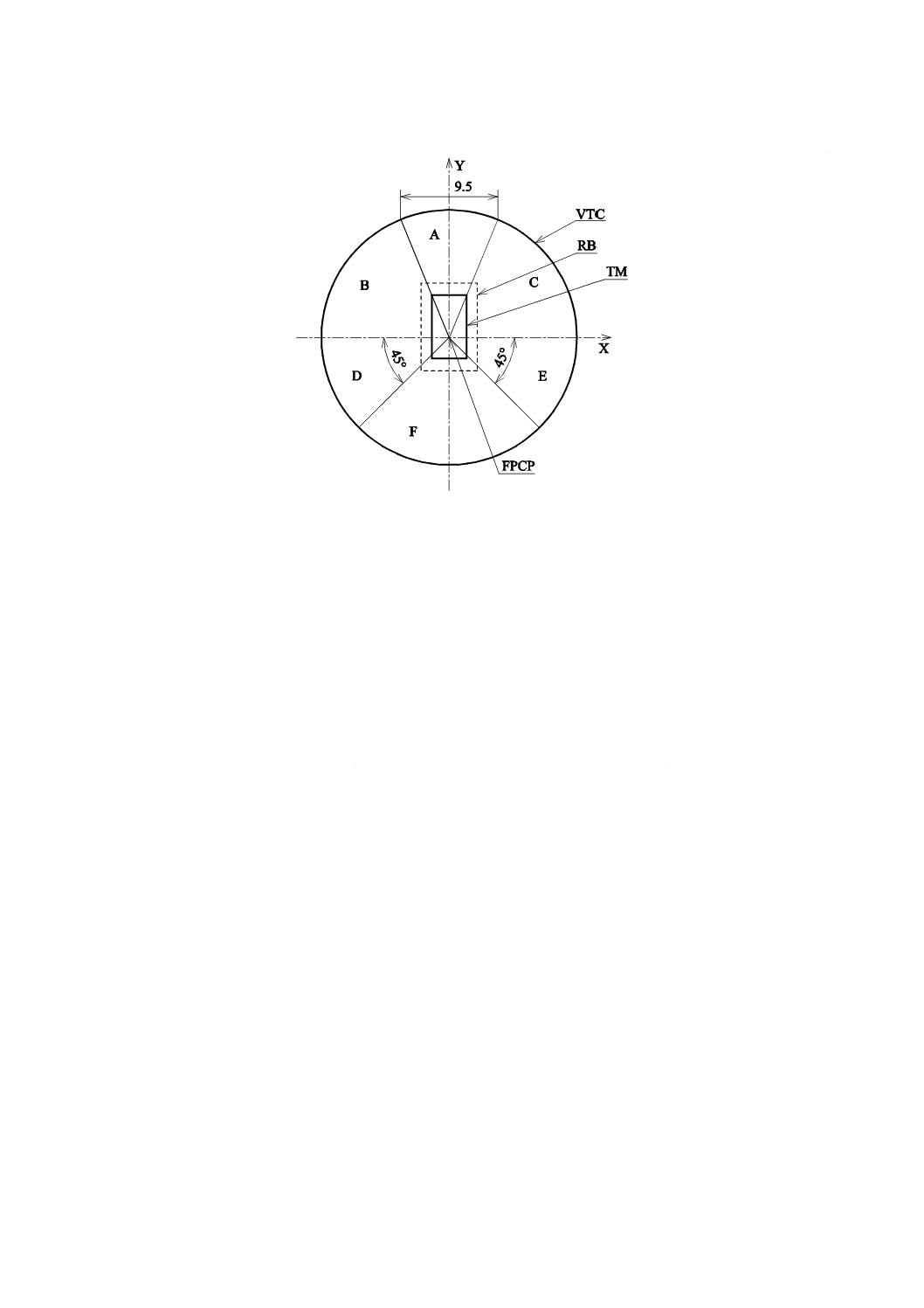
光源中心点(FPCP)(3.2)の垂直投影を中心とする基準地表面上の半径12 mの円(図2参照)。
3
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3.2
機側長方形境界(RB)(rectangular boundary)
機械に外接する長方形から1 m外側の基準地表面上の(長方形を構成する)線。ただし,機械前方まで
の距離が1 mを上回る車体屈折(アーティキュレートフレーム)式ダンパ及び機械後方までの距離が1 m
を上回るグレーダは除く(図2及び8.3.3参照)。
3.3.3
扇形視野A部(sector of vision A)
機械前方で,半径12 mの視界測定円(VTC)上における,光源中心点(FPCP)(3.2)を通る前後方向
垂直面(X軸)で二分された長さ9.5 mの弦の両端と光源中心点(FPCP)を通る二つの垂直面とで区切ら
れた視界測定場表面の一区域(図2参照)。
3.3.4
扇形視野B部及びC部(sectors of vision B and C)
機械前方で,扇形視野A部の外側と光源中心点(FPCP)(3.2)を通る左右方向垂直面とで区切られた視
界測定場表面の二つの区域(図2参照)。
3.3.5
扇形視野D部及びE部(sectors of vision D and E)
機械後方で,光源中心点(FPCP)(3.2)を通る横断方向垂直面と左右後方各45°の垂直面とで区切られ
た視界測定場表面の二つの区域(図2参照)。
3.3.6
扇形視野F部(sector of vision F)
視界測定円(VTC)(3.3.1)内の機械後方の扇形視野D部とE部との間の一区画(図2参照)。
4
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 m
記号
VTC
視界測定円
RB
機側長方形境界
TM
測定機械
Y
機械前方
A,B,C,D,E,F
扇形視野
FPCP
光源中心点
図2−視界測定領域
3.4
遮影(masking)
複数の光源フィラメントからの光線が,機械本体及び/又は作業装置によって遮られた結果,12 mの視
界測定円(VTC)(3.3.1)上又は機側長方形境界(RB)(3.3.2)における垂直試験体上に投影された影。
注記 遮影は,例えば,ROPS(転倒時保護構造),窓枠,ドアの枠,排気管,建屋,バケット,ブー
ムなどの作業装置によっても生じる。
3.5
光源機器(light source apparatus)
少なくとも2個の間隔を調節可能な光源で構成され,光源中心点(FPCP)(3.2)を中心に360°回転可
能な測定機器で,運転員の目の位置の範囲を模擬するもの(図1参照)。
3.6
視界性能基準(visibility performance criteria)
機械の作業時及び走行時に,機械近傍の人員のリスクを最小限とすることを意図した設計基準。
注記 視界性能基準は,12 mの視界測定円(VTC)又は機側長方形境界(RB)(3.3.2)における遮影
の許容最大値として規定される。
3.7
現場管理(jobsite organization)
人と機械とが共同で作業する場合の現場での規則及び手順。
5
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例 取扱説明書の安全注意,交通整理,入場制限,運転員及び現場作業員の教育,機械及び車両の識
別(点滅灯,警告表示),後進走行の規制,通信機器の使用など。
3.8
直接及び間接視界
3.8.1
直接視界(direct visibility)
光源からの光によって判定する,直接目で見ることのできる視界。
3.8.2
間接視界(indirect visibility)
鏡,監視カメラ(CCTV)などの視覚補助装置を使って得られる視界。
3.9
派生土工機械(derivative earth-moving machine)
機械の標準構成に対し,視界に影響するような変更を加えた,又は視界に影響するような作業装置を装
着した機械。
注記 この定義は,ISO 6165の定義とは異なる。
4
基本寸法
4.1
光源間隔寸法
意図した機械の作業に応じて表1に規定するように次の3種類の光源間隔を適用する。
a) 65 mm 土工機械の着席した50パーセンタイルの運転員(中柄運転員)の両目の間隔に相当する光源
間隔
b) 205 mm 土工機械の着席した50パーセンタイルの運転員(中柄運転員)が後方45°(真直前方から
時計回り又は反時計回りに135°)を見るときの目の移動範囲(胴体及び頭部の動きを考慮)に相当
する光源間隔の最大値
c) 405 mm 土工機械の着席した50パーセンタイルの運転員(中柄運転員)が前方(真直前方から時計
回り又は反時計回りに90°)を見るときの目の移動範囲(胴体及び頭部の動きを考慮)に相当する光
源間隔の最大値
4.2
遮影寸法
許容できる遮影寸法は,表1による。
4.3
測定のための基準寸法
測定のために次の基準寸法を適用しなければならない。
a) 1 m 土工機械近傍を表記するために機側長方形境界(RB)と併せて使用する距離
b) 1.5 m,1.2 m及び1.0 m 表2に従って機械近傍で視界観測を行う基準地表面からの最大高さ
注記1 1.5 mは,機械近傍の視界観測を行う基準地表面からの最大高さで,土工機械の小柄運転
員の身長(JIS A 8315では1.55 mと規定)に基づく。
c) 12 m 光源中心点(FPCP)(直下)を中心とする水平面上の視界測定円(VTC)の半径
注記2 a)の1 m長方形境界は,8.3.3.1で手直しする。
5
測定用機器
5.1
光源機器は,2個以上のハロゲン電球(又はこれと同等のもの)を垂直に取り付けた電球取付棒を水
平に配置できるものとし,各電球は,棒上を,棒の中心点から両方向に32.5 mmから202.5 mmまで水平
6
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
移動できるのがよい。電球取付棒は,光源中心点(FPCP)を中心として360°回転できるものとする。各
電球のフィラメントの上下方向中心は,JIS A 8318に規定する座席基準点(SIP)の上方680 mm,前方20
mmの位置に設置する(図1参照)。
5.2
垂直試験体は,高さ1.0 m,1.2 m又は1.5 mで,適切な幅(例えば,100 mm〜150 mm)のものとし,
機側長方形境界(RB)上での遮影の評価に使用する。機械の形式,質量及び機側長方形境界(RB)の領
域に応じた試験体の高さは,表2を参照する。高さ1.5 mの試験体は,鏡の評価に使用することができる
(7.3参照)。
5.3
測定地表面は,どの方向の勾配も3 %以下の,例えば,締め固められた土,コンクリート,舗装平
面のような堅固な表面とする。
5.4
視界測定円(VTC)又は機側長方形境界(RB)上での視界の遮影を判定するため,光源と基準地表
面との間の光線又は光源と垂直試験体との間の光線を探知するのに手持ち式の鏡を使用できる。同等の結
果が得られるほかの機器を使用してもよい。
6
測定機械の構成
6.1
機械は,作業現場での運転及び/又は公道走行のため,製造業者の指定する作業装置を装着しなけ
ればならない。
6.2
ドア,窓など全ての開口部は閉じる。
6.3
機械は,作業装置を製造業者の指定する走行姿勢にして測定地表面に配置しなければならない(附
属書Aの図参照)。光源中心点(FPCP)は,視界測定円(VTC)の中心の真上に置く。機械の前部を扇形
視野A部に向ける。ショベル系掘削機の追加要求事項については,8.3.3.3を参照する。
6.4
運転座席は,例えば,電球取付棒の回転を妨げるなど,光源に対して制限又は影響を与えない位置
とする。試験容易化のため,座席又は背もたれの延長部は取り除いてもよい。
7
間接視界の性能基準
7.1
視覚補助装置
機械設計の際に,まず第一に,直接視界を最大としなければならない。しかしながら,多くの機種で,
機械設計及びその使用に際して運転員に対する視覚補助装置が必要となることがある。この規格の性能要
求事項を満足するための直接視界が十分でない場合は,視覚補助装置を追加しなければならない。
7.2
表示装置の位置
運転員が監視すべき視野を見るために使用する機器[例えば,監視カメラの画像表示装置,鏡(後写鏡
又は障害物を確認する鏡)]は,運転員の前方を中心とする180°の円弧内に配置しなればならない。
油圧ショベルでは,運転員の前方を中心とする270°の円弧内に視覚補助装置(例えば,鏡)を配置し
てもよい。運転員後方の障害物を確認する鏡は,運転員が機械の側面に沿った領域,又はその側面から機
械後方に延びる領域を見ることができるようにするためだけに配置使用しなければならない。
鏡の中央を,参照する鏡の位置として用いる。鏡の位置は,試験報告書に記載しなければならない。
7.3
鏡の性能基準
この規格の性能要求事項を満足する目的で装着する鏡の間接視界は,それが光源中心点(FPCP)から
1.2 m離れるごとに,高さ1.5 mの試験体が鏡の面で7 mm以上の映像で見えなければならない。例えば,
運転員の目の位置の中心を模擬している光源中心点(FPCP)から4.8 m離れて配置の鏡に対して,高さ1.5
mの試験体の映像は,28 mmでなければならない。鏡の性能は,鏡で見ようとしている視野範囲内の一番
7
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
遠い位置に垂直試験体を置いて評価しなければならない。評価は,実際の試験,模擬試験,又は計算のい
ずれで実施してもよい。この評価は,鏡面上の映像の寸法,運転員の目から鏡までの距離及び鏡から試験
体までの距離との(正・反)比例関係を用いる。
注記 高さ1.2 mの試験体は,1.2 mの視距離で,5.6 mmの高さの映像となる必要がある。同様に,
高さ1.0 mの試験体は,1.2 mの視距離で,4.7 mmの高さの映像となる必要がある。
この規格の性能要求事項に適合するため,鏡は直視使用しなければならない。ある鏡で別の鏡を見るこ
とは許容しない。
7.4
監視カメラの性能基準
監視カメラは,JIS A 8338に適合しなければならない。
8
測定手順
8.1
測定地表面の線引き及び測定地表面への機械の配置
8.1.1
図2に示すように,2本の中心線をもつ測定地表面に半径12 mの視界測定円(VTC)を描く。
8.1.2
図2に示すように,扇形視野A部,B部,C部,D部,E部及びF部を測定地表面上に線引きする。
8.1.3
6.3に規定するように,機械を測定地表面上に配置する。
8.1.4
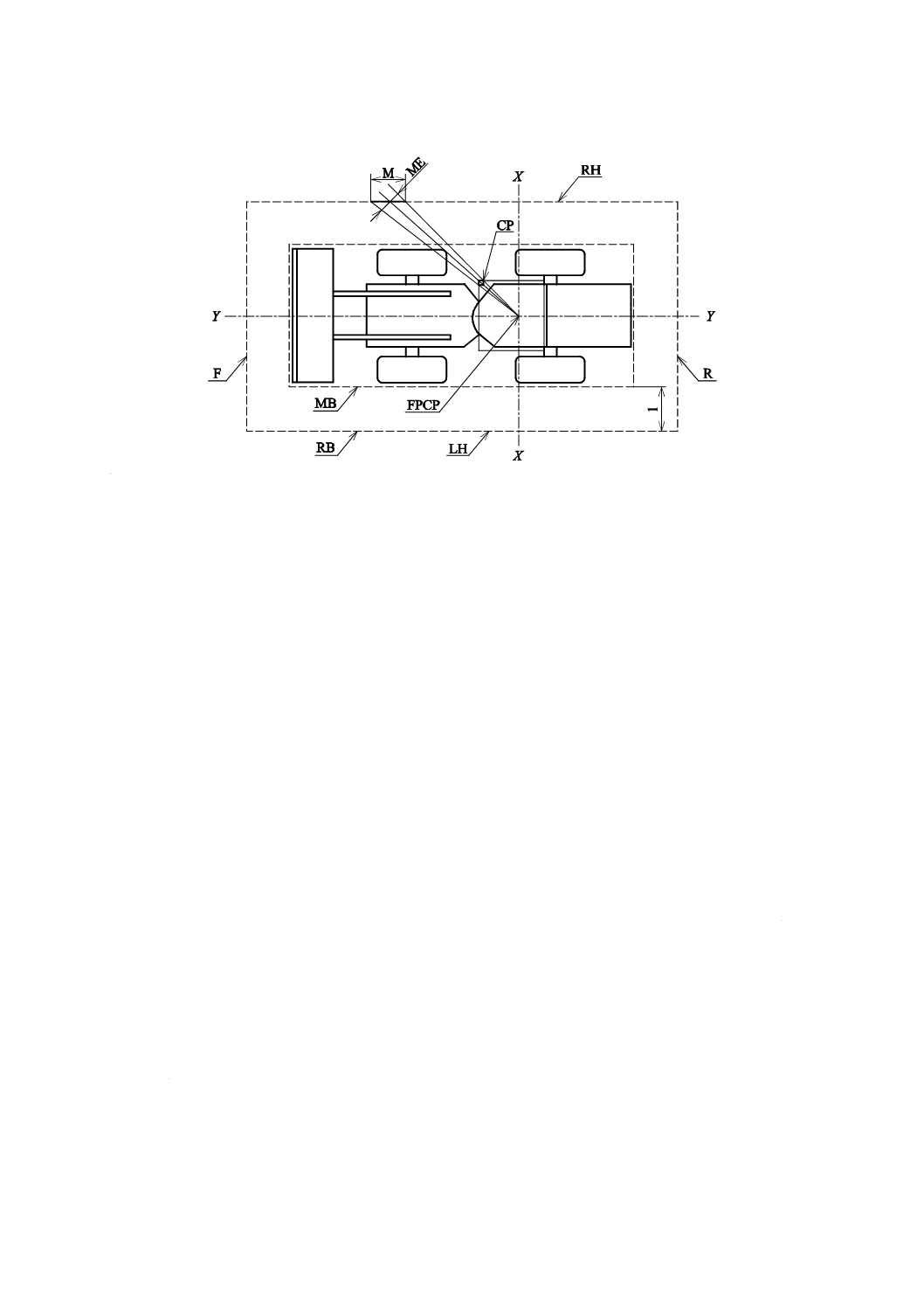
図3に示すように,機械の垂直投影に接する最小の長方形から1 m外側の測定地表面上に,機側長
方形境界(RB)を線引きする。ショベル系掘削機の機側長方形境界(RB)は,(油圧ショベル)本体(JIS
A 8403-1参照)の最前端から,又は排土板が標準装備の場合は,その前端から測定する(図A.3参照)。
8.1.5
座席の位置が,機械の縦方向中心線に平行ではない場合,表1の両目の間隔は,運転員と併せて回
転させなければならない。機械の縦方向中心線に対する扇形視野各部の視界性の性能基準は,元のままで
なければならない。
8
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 m
記号
MB
機械境界
RB
機側長方形境界(表1に注記した場合を除き前後左右四面から1 m)
FPCP 光源中心点
M
RBでの遮影長さ
ME
光源に対して垂直な,遮影の有効長さ
CP
運転室建屋の支柱
F
RBの前面
LH
RBの左側面
RH
RBの右側面
R
RBの後面
図3−機側長方形境界(RB)上での位置及び遮影
8.2
測定用機器の配置
8.2.1
光源中心点(FPCP)が5.1に規定する位置になるよう光源を取り付ける。
8.2.2
間隔65 mmの電球の配置は,光源機器の中心に対して対称とする。電球の間隔を最大値205 mm及
び405 mmまで許容して用いる場合,左右の光源は12 mの視界測定円(VTC)上又は機側長方形境界(RB)
上における遮影が最小となるようそれぞれ配置することができる。電球の間隔205 mm及び405 mmの場
合,目の位置の範囲を代表するため,2個以上の光源を同時に用いてもよい。この手順の間,光源中心点
(FPCP)からの最大距離が,評価対象の扇形視野に対して適切な102.5 mm又は202.5 mmであれば,二つ
の光源は,光源中心点(FPCP)に対して対称に配置する必要はない。
8.2.3
視界測定円での測定では,二つの光源を結ぶ線が,光源中心点(FPCP)と視界に遮影を生じる構
成部品の中心とを結ぶ線に対して垂直になるよう電球取付棒を回転させる。
8.2.4
機側長方形境界(RB)での測定では,遮影を最小とするために電球取付棒を回転させて行う。
8.3
遮影の測定
8.3.1
一般
初期の測定では,直接視界を考えて実施する。
直接視界では性能要求に適合しない場合,要求される視界性能基準に適合させるため,間接視界を与え
る視覚補助装置(例えば,鏡,監視テレビ)を組み入れて視界性能規準に適合するように測定しなければ
9
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ならない。視覚補助装置は,箇条7の要求事項に適合しなければならない。
鏡による間接視界を判定するため,直接視界の測定手順(箇条7)と同じ手順を適用し,視界測定円(VTC)
及び機側長方形境界(RB)に対する鏡による光源からの反射を測定及び記録する。鏡を配置した扇形視野
に関し,視界測定円(VTC)では8.3.2の規定と同じ電球間隔を用い,機側長方形境界(RB)では8.3.3の
規定と同じ電球間隔を用いる。
視覚補助装置をこの規格及びJIS A 8333規格群の両方の性能要求事項に適合するために使用する場合は,
両方の評価で視覚補助装置の配置を変更してはならない(例えば,JIS A 8333規格群の要求事項に適合さ
せるために調整した鏡は,その後,この規格の要求事項に適合させるために再度調整してはならない。)。
8.3.2
視界測定円(VTC)での測定
該当する扇形視野に対し,表1に規定する電球間隔に調節し,光源を8.2.2及び8.2.3に規定するように
配置する。
遮影が隣接する扇形視野にまたがる場合,扇形視野各部に対して表1に規定する電球間隔を使用してで
きる遮影のうち,より大きな遮影ができる方の扇形視野の遮影に対して表1で規定する性能要求基準を用
いて,(またがる)遮影の全幅で評価する。
機械の垂直な構成部品が複数隣接している場合,当該の扇形視野に対して規定されている電球間隔より
も狭い間隔の電球取付棒を使用して最小遮影を判定してもよい(8.2.2も参照)。
2個の隣接する遮影の間の最小間隔は,10.1に規定する要求事項を考慮しなければならない。
視界測定円(VTC)上での遮影の弦の長さを判定できるよう,基準地表面上の視界測定円(VTC)にお
ける遮影を記録する。
100 mm未満の幅の遮影は,記録する必要はない。
(例えば,ドアロック,カップホルダ,握りのような)機械の構成部品によって視界測定円(VTC)上
の遮影が広くなっている場合,視界測定円(VTC)の内側及び外側1 m以内の遮影を測定してもよい。測
定円の内側1 m又は外側1 mで遮影が狭くなっている場合は,視界測定円(VTC)での遮影の幅として適
用してもよい。
測定を暗い環境で行ってもよく,その場合は,機械の構成部品による影を,直接,視界測定円(VTC)
で測ることができる。また,測定地表面に配置された鏡を使用し,フィラメントからの光線を視認する線
を引いて遮影が発生する点を判定できる。
8.3.3
機側長方形境界(RB)での測定
8.3.3.1
機側長方形境界(RB)での測定のため,表1に規定する電球間隔に調節し,光源を8.2.2及び8.2.4
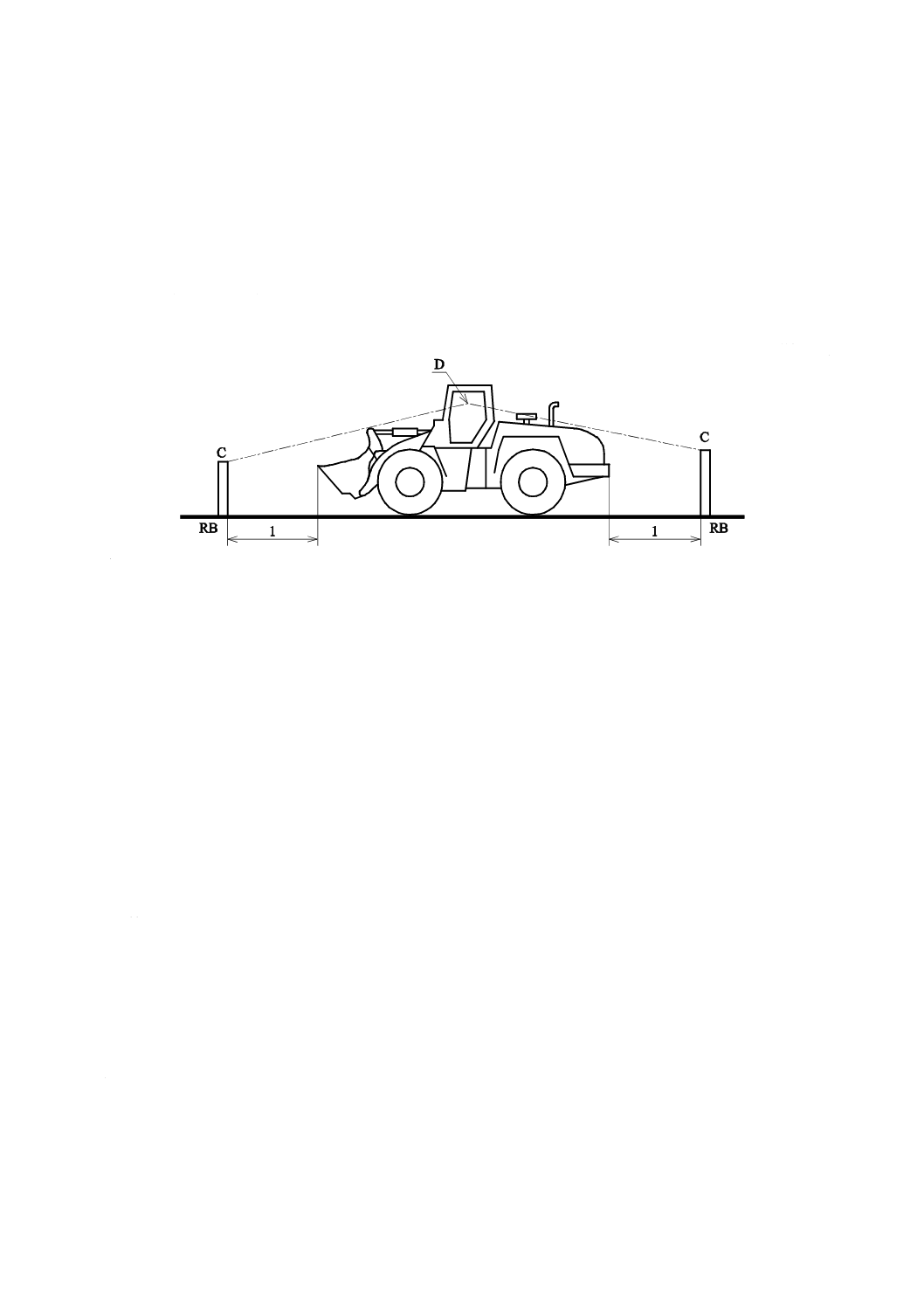
に規定するように配置する。表2に規定する高さの垂直試験体を使用して,図3及び図4に示すように機
側長方形境界(RB)に沿って遮影を評価する。
車体屈折(アーティキュレートフレーム)式ダンパの前部及びグレーダの後部では,機械から機側長方
形境界(RB)までの距離X又は距離Yは,表1に示す値とする。
8.3.3.2
機側長方形境界(RB)上で機械の構成部品によって光源を直接視認できない箇所に印を付け,そ
れらの遮影をそのX座標及びY座標と共に記録する。遮影の幅(M)が機側長方形境界(RB)上で300 mm
を超える場合は,光源に対する直角方向の遮影の幅MEを測定し(図3参照),MEを遮影の幅として記録
する。
垂直試験体の頂部が遮影にかかった場合は,垂直試験体を少なくとも200 mmの高さで見ることができ
るか確認する。見ることができる場合は,機側長方形境界(RB)上でのこの部分は評価すべき遮影には加
えない。
10
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
測定を暗い環境で行ってもよく,その場合は,機械の構成部品による影は,垂直試験体上に直接記録す
ることができ,又は垂直試験体に配置された鏡を使用してフィラメントからの光線を視認する線を引いて
遮影が発生する点を判定できる。垂直試験体の試験体高さ以下の部分の視認性は,試験体に鏡を上下させ
て使用することによって確認できる。
200 mm未満の幅の遮影は,記録する必要はない。
機械の垂直な構成部品が複数隣接している場合,最大よりも狭い光源間隔を使用して最小遮影を判定し
てもよい(8.2.2も参照)。
単位 m
記号
RB
機側長方形境界
C
垂直試験体
D
光源中心点(FPCP)
図4−機側長方形境界(RB)での測定
8.3.3.3
ショベル系掘削機の右側視界は,作業装置を最初は走行姿勢にして機側長方形境界(RB)を評価
しなければならない。車輪式ショベル系掘削機では,製造業者が公道走行姿勢として指定する代替走行姿
勢で評価してもよい。
作業装置を最初は走行姿勢として,バケットを地表より上方に保ちつつ作業装置を動作範囲で操作しな
ければならない。
次のいずれかを用いて,機械の運転員の側方反対側(例えば,運転員がいる側に対して,動作する作業
装置の,向こう側)の視覚補助装置が,遮られるか否かを判定してもよい。
− 電球取付棒を,FPCP(光源中心点)から評価対象の視覚補助装置に向けて引いた線に垂直とし,その
棒の上での両目の間隔405 mmを想定して行う計算機による試験模擬による。
− 視点を光源点と同じ高さとした着座運転員による。運転員は,両目の間隔405 mmを模擬するように
動作することを許されなければならない。
(特定のブーム位置で鏡の方向の視認性が妨げられるため)間接視界の不足によって,遮影がもたらさ
れる場合は,その遮影の方向の直接視界を確実としなければならない。機械の寸法によってそれが技術的
に不可能な場合は,次の要求事項を適用しなければならない。
a) (例えば,動作する作業装置に対して運転員の)反対側の側方に機側長方形境界(RB)を見張る視覚
補助装置が二つある場合,両方とも遮られることがあってはならない。
b) (運転員の)反対側の側方に,機側長方形境界(RB)の側面を見張る視覚補助装置が一つしかない場
合,作業機の動作によって遮られてはならない。
11
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
公道走行だけに限定して使用される鏡(例えば,JIS A 8333規格群を適用する典形的には車輪式ショベ
ル系掘削機の鏡)は,作業装置の指定された走行姿勢では遮られなければ,作業装置のほかの動作で遮ら
れてもよい。
9
算定方法
9.1
視界測定円(VTC)又は機側長方形境界(RB)での遮影計算手順
視界測定円(VTC)又は機側長方形境界(RB)での遮影を判定するために,計算手順を用いてもよい。
規定する計算手順は,試験方法の代替手段となり得る。
左右の目の間隔sの双眼視界に対して,遮影(x)は,式(1)によって与えられる(図5参照)。
注記 この式(1)は,遮影の近似計算で,遮影の長さが増大するに従って誤差が拡大するが,遮影の幅
が5 m以内では実測による確認なしでも許容できる精度である。
s
r
a
s
b
x
+
−
=
·········································································· (1)
ここに,
a: 光源電球フィラメントと遮影を生じる構成部品との距離(mm)
b: 光源中心点(FPCP)と構成部品の中央を結ぶ半径方向に対し
て直角となる部分とを水平方向に測定した遮影を生じる構成
部品の幅(mm)
r: 光源中心点(FPCP)直下の測定地表面への投影点から視界測
定円(VTC)又は機側長方形境界(RB)への半径又は距離(mm)
s: 両目の間隔による双眼視界を模擬するために用いる光源電球
フィラメント間の距離(mm)
x: 視界測定円(VTC)に接する遮影の幅又は機側長方形境界(RB)
での遮影の有効長さ(図3のME)(mm)
注記 図中の記号の定義は,式(1)参照
図5−遮影算定方法
12
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.2
計算機による試験模擬
この規格の規定を,計算機による試験模擬で遮影を判定し,結果を試験報告としてもよい。
10 評価方法及び性能基準
10.1 視界測定円(VTC)上での視界性能基準
視界測定円(VTC)上での二つの隣接する遮影の間隔は,700 mm以上でなければならない。そうでな
い場合は,隣接する二つの遮影及びその間隔を合わせて単一の遮影として報告しなければならない。
隣接する狭い遮影は,その間隔も合わせてより大きな単一の遮影とし,数も減じて報告してもよい。
測定の結果,遮影がないか又は直接視界若しくは間接視界による遮影が表1に規定する性能基準以下の
場合は,当該機械はこの規格の要求事項に適合する。
注記1 機種及び運転質量ごとに視界性能基準を表1にまとめて示す。表1の左端の欄は,機械の種
類及び運転質量による区分を示している。視界測定円(VTC)上での扇形視野A部,B部,
C部,D部,E部及びF部に対して視界性能基準が規定されている。扇形視野各部に対して,
第1行目は光源電球フィラメント間隔の最大許容値を示し,ほかの行は扇形視野各部におけ
る遮影の数及び幅の許容値を示している。
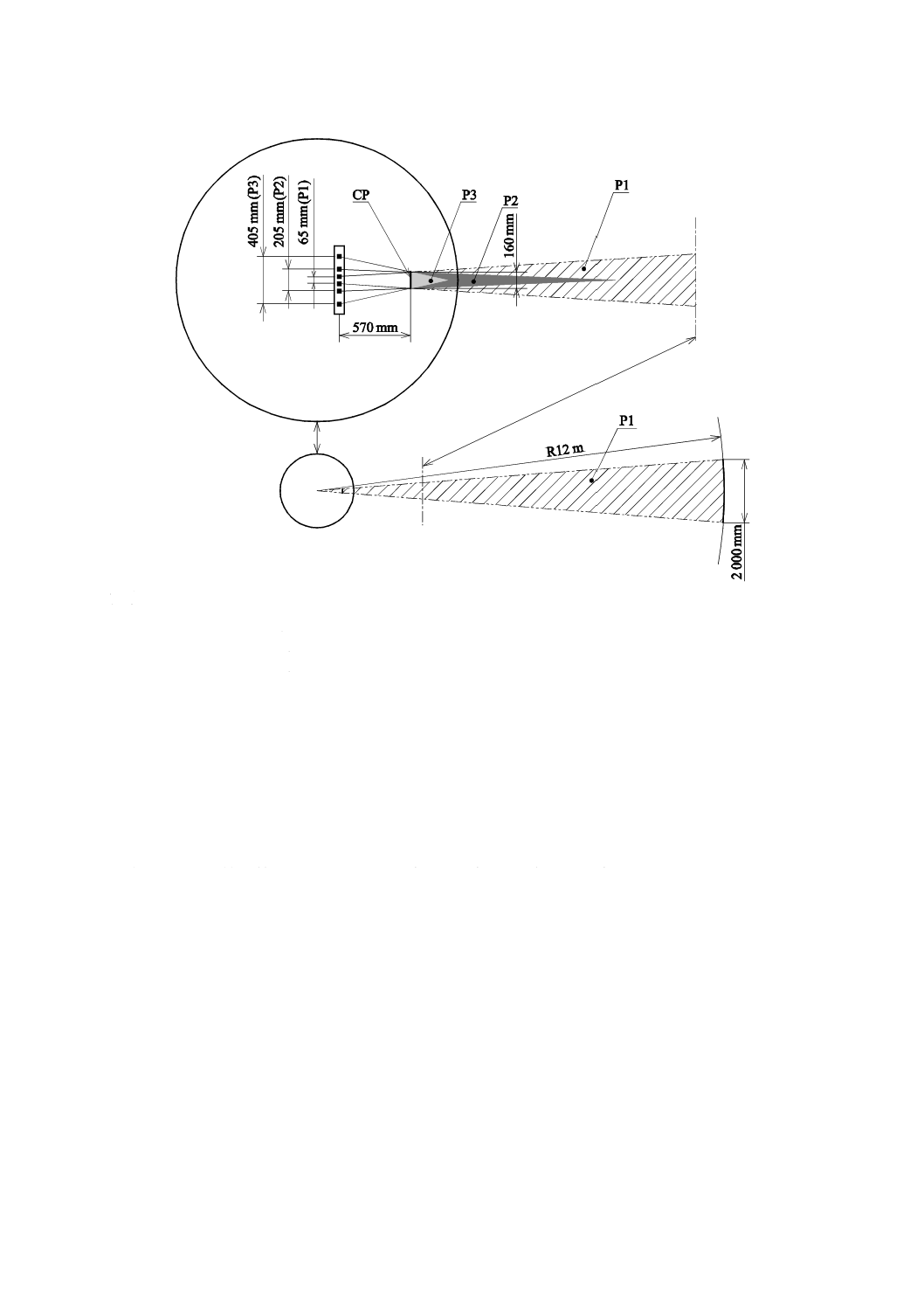
注記2 扇形視野A部,B部及びC部に対する目の間隔65 mmでの視界測定は,試験目的であり,
通常運転員が頭部及び目を最大405 mmまで動かす可能性は考慮されていない。運転員が実
際に視認する遮影の寸法は,65 mmの目の間隔によって測定した遮影寸法よりも小さくなる。
例えば,運転室建屋の支柱の幅が160 mmで光源中心点(FPCP)から570 mmの距離にある
とすると,目の左右間隔65 mmの光源で測定した遮影は2 000 mmとなるが,目の左右間隔
を205 mmとすれば遮影は完全に消滅する(図6参照)。
13
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
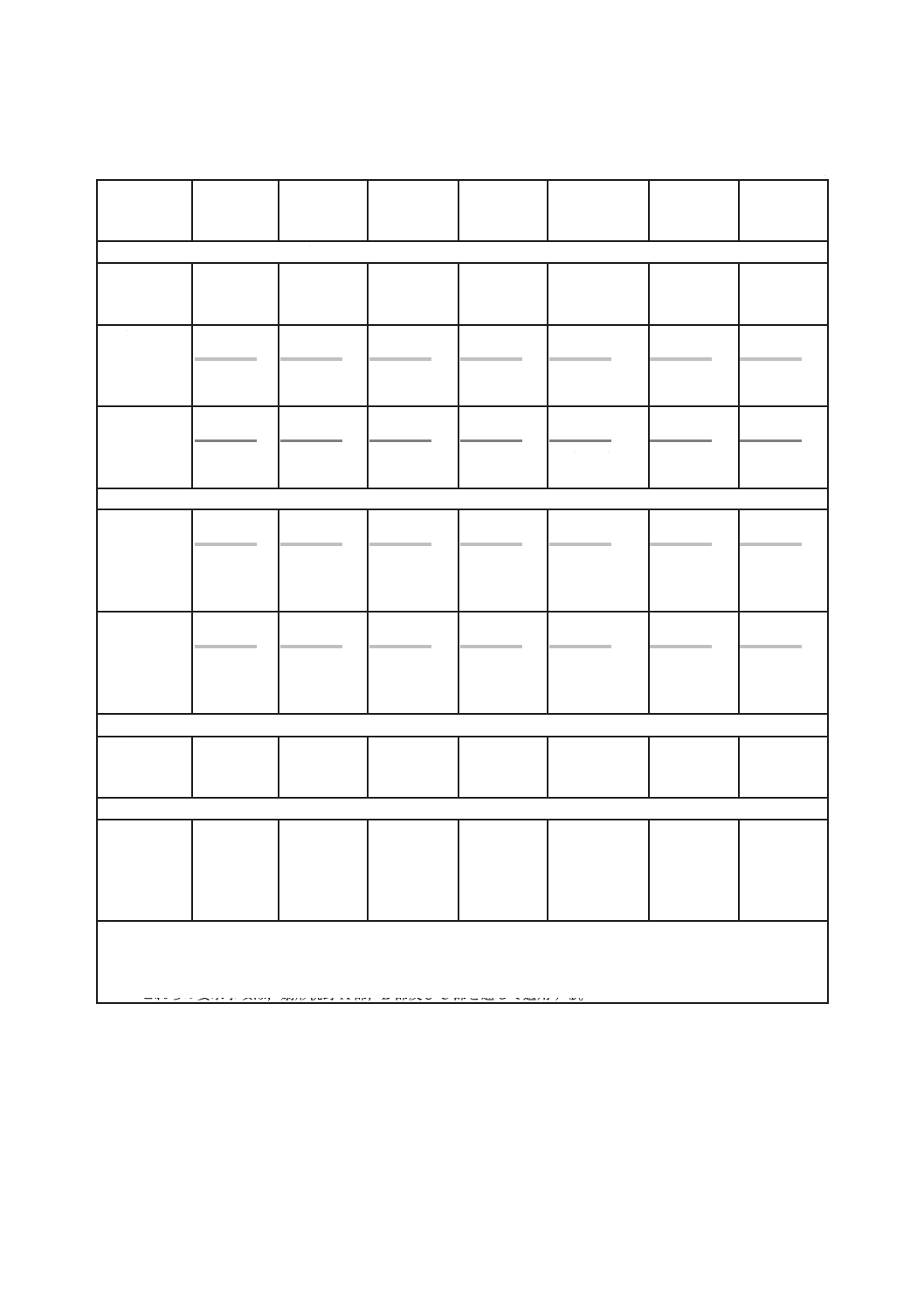
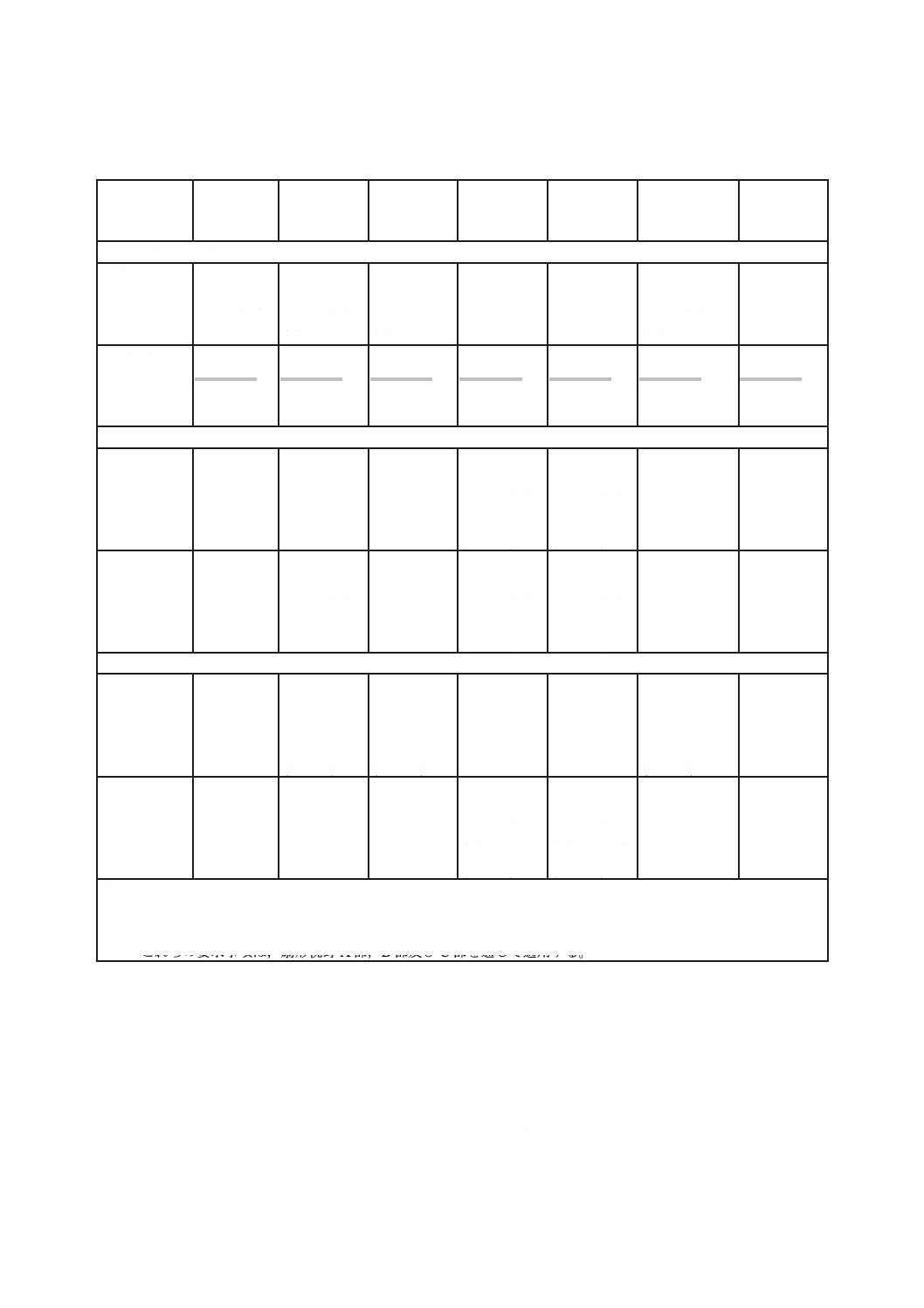
表1−視界性能基準
単位 mm
運転質量
(JIS A 8320
空荷)m,t
A
B
C
D
E
F
RB
第1行目は,機種ごとの目の間隔の許容値(光源電球フィラメント間隔の最大許容値)を示している。第2行目以降
は,遮影の数及び幅の許容値を示している。
ホイールローダ
m<10
65
------------
2-700
205
------------
0
205
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
65
------------
(1-700及び
1-1 300)又は
(1-2 000)
405
------------
300
10≦m≦25
65
------------
2-700又は
1-1 300
205
------------
0
205
------------
0
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
65
------------
3-1 300
405
------------
300
25<m≦30
405
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
65
------------
3-1 300
405
------------
300
スキッドステアローダ
全形式−車
輪式及び履
帯式
65
------------
0
65
------------
(1-700及び
1-1 300)又は
(1-2 000)b)
65
------------
(1-700及び
1-1 300)又は
(1-2 000)b)
205
-------------------------------------------------------
(2-2 100及び2-1 300)又は(2-4 000)a)
405
------------
300
注記 例えば,機械の速度,視界測定円(VTC)への距離,機械の機動性などによって扇形視野各部に重大な危険源
がない場合は,この表で特定の基準を規定していない。
注a) これらの要求事項は,扇形視野D部,E部及びF部を通じて適用する。
b) これらの要求事項は,扇形視野A部,B部及びC部を通じて適用する。
14
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−視界性能基準(続き)
単位 mm
運転質量
(JIS A 8320
空荷)m,t
A
B
C
D
E
F
RB
履帯式ローダ
m<20
65
------------
2-700
205
------------
0
205
------------
0
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
65
------------
(1-700及び
1-1 300)又は
(1-2 000)
405
------------
300
20≦m≦30
405
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
65
------------
(1-700及び
1-1 300)又は
(1-2 000)
405
------------
300
バックホウローダ
m≦15
65
------------
2-700
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
65
------------
1-1 300及び
1-3 000
405
-------------
300
車輪式ショベル系掘削機
m<10
前方ブーム
205
------------------------------------------------------
205
------------
205
------------
65
------------
405
------------
(1-700及び1-1 300)又は(1-2 000)b)
0
0
(1-700及び
1-1 300)又は
(1-2 000)
300
m<10
205
205
405
205
205
65
405
側方ブーム
------------
(1-700及び
1-1 300)又は
(1-2 000)b)
------------
0
------------
1-2 500
------------
0
------------
0
------------
(1-700及び
1-1 300)又は
(1-2 000)
------------
300
10≦m≦25
405
------------
1-700及び
1-1 300
205
------------
0
405
------------
1-700及び
1-5 500
205
------------
1-700及び
1-1 300
------------
特定の基準な
し
65
------------
1×機械車幅
及び
2-1 300
405
------------
300
注記 例えば,機械の速度,視界測定円(VTC)への距離,機械の機動性などによって扇形視野各部に重大な危険源
がない場合は,この表で特定の基準を規定していない。
注a) これらの要求事項は,扇形視野D部,E部,F部を通じて適用する。
b) これらの要求事項は,扇形視野A部,B部,C部を通じて適用する。
15
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−視界性能基準(続き)
単位 mm
運転質量
(JIS A 8320
空荷)m,t
A
B
C
D
E
F
RB
履帯式ショベル系掘削機
m<10
前方ブーム
205
------------------------------------------------------
205
------------
205
------------
65
------------
(1-700及び
1-1 300)又は
(1-2 000)
405
------------
300
(1-700及び1-1 300)又は(1-2 000)b)
m<10
側方ブーム
205
------------
(1-700及び
1-1 300)又は
(1-2 000)b)
205
------------
0
405
------------
1-2 500
205
------------
0
205
------------
0
65
------------
(1-700及び
1-1 300)又は
(1-2 000)
405
------------
300
10≦m<25
405
------------
1-700及び
1-1 300
205
------------
0
405
------------
1-700及び
1-5 500
205
------------
1-700及び
1-1 300
------------
特定の基準な
し
65
------------
1×機械車幅
及び
2-1 300
405
------------
300
25≦m≦40
405
------------
1-700及び
1-1 300
205
------------
0
405
------------
1-1 600及び
1-5 500
205
------------
1-700及び
1-1 300
------------
特定の基準な
し
65
------------
1×機械車幅
及び
2-1 300
405
------------
300
注記 例えば,機械の速度,視界測定円(VTC)への距離,機械の機動性などによって扇形視野各部に重大な危険源
がない場合は,この表で特定の基準を規定していない。
注a) これらの要求事項は,扇形視野D部,E部及びF部を通じて適用する。
b) これらの要求事項は,扇形視野A部,B部及びC部を通じて適用する。
16
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−視界性能基準(続き)
単位 mm
運転質量
(JIS A 8320
空荷)m,t
A
B
C
D
E
F
RB
固定フレーム式ダンパ(重ダンプトラック)
m<10
65
------------
0
205
------------
0
205
------------
0
205
------------
0
205
------------
0
65
------------
0
405
------------
300
10≦m<20
65
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
205
------------
0
205
------------
1-700及び
1-1 300
65
------------
0
405
------------
300
20≦m<50
65
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
205
------------
0
------------
特定の基準な
し
65
------------
3-1 300
405
------------
300
車体屈折(アーティキュレートフレーム)式ダンパ(重ダンプトラック)
m<25
65
------------
0
205
------------
0
205
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
65
------------
3-1 300
405
------------
300
X=1 500
図A.6参照
25<m<50
65
------------
0
205
------------
0
205
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
65
------------
3-1 300
405
------------
300
X=2 500
図A.6参照
前部荷台式ダンパ(不整地運搬車)
m<10
65
------------
0
205
------------
0
205
------------
0
205
------------
0
205
------------
0
65
------------
0
405
------------
300
グレーダ
m<15
65
------------
2-700及び
1-1 300
205
------------
0
205
------------
0
205
------------
0
205
------------
0
65
------------
2-700及び
1-1 300
405
------------
300
Y=2 000
図A.7参照
注記 例えば,機械の速度,視界測定円(VTC)への距離,機械の機動性などによって扇形視野各部に重大な危険源
がない場合は,この表で特定の基準を規定していない。
注a) これらの要求事項は,扇形視野D部,E部及びF部を通じて適用する。
b) これらの要求事項は,扇形視野A部,B部及びC部を通じて適用する。
17
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−視界性能基準(続き)
単位 mm
運転質量
(JIS A 8320
空荷)m,t
A
B
C
D
E
F
RB
履帯式ブルドーザ
m<10
205
------------
1-700及び
2-1 300
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
205
------------
1-700
205
------------
1-700
65
------------
2-700及び
1-1 300
405
------------
300
10≦m≦18
405
------------
0
405
------------
0
405
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
65
------------
2-700及び
1-1 300
405
------------
300
ランドフィルコンパクタ
10<m<25
65
------------
2-700
205
------------
0
205
------------
0
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
65
------------
3-1 300
405
------------
300
25≦m≦35
405
------------
0
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
65
------------
3-1 300
405
------------
300
ローラ
5<m<10
65
------------
0
65
------------
(1-700及び
1-1 300)又は
(1-2 000) b)
65
------------
(1-700及び
1-1 300)又は
(1-2 000) b)
205
------------
1-700及び
1-1 300
205
------------
1-700及び
1-1 300
65
------------
(1-700及び
1-1 300)又は
(1-2 000)
405
------------
300
10≦m≦25
65
------------
2-700
205
------------
0
205
------------
0
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
205
------------
(1-700及び
1-1 300)又は
(1-2 000)
65
------------
3-1 300
405
------------
300
注記 例えば,機械の速度,視界測定円(VTC)への距離,機械の機動性などによって扇形視野各部に重大な危険源
がない場合は,この表で特定の基準を規定していない。
注a) これらの要求事項は,扇形視野D部,E部及びF部を通じて適用する。
b) これらの要求事項は,扇形視野A部,B部及びC部を通じて適用する。
10.2 機側長方形境界(RB)での視界性能基準
機側長方形境界(RB)に対して表1に規定する目の間隔を用い,各領域に対して表2に規定する試験体
の高さを用いて測定した結果,遮影がないか又は遮影が許容値(300 mm)以下の場合は,当該機械はこの
規格の要求事項に適合する。機側長方形境界(RB)の前部で,作業装置が,表2に規定する(高さの)試
験体の視認を遮る場合,リスクアセスメントを行う。また,次の事項のいずれかを実施する。
− その機械の運転取扱説明書で,そのような作業装置を装着して走行しないことを推奨しなければなら
ない。
18
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 運転取扱説明書で,機械の前方に人を立入禁止とするような現場管理を推奨しなければならない。
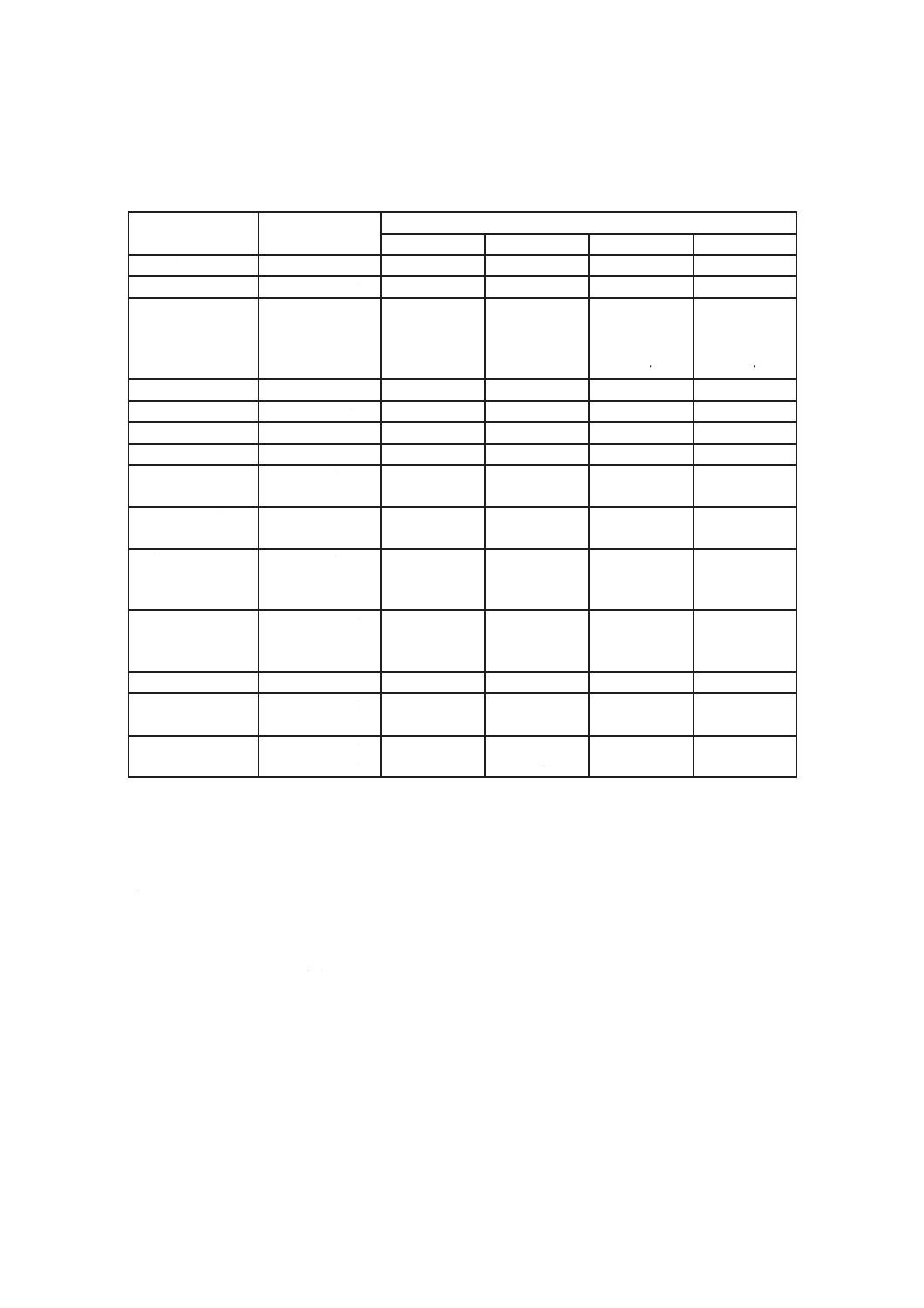
表2−機械の形式,質量及び機側長方形境界(RB)の各区域に応じた垂直試験体の高さ
機械の形式
質量
機側長方形境界(RB)の各区域
前側
左側
右側
後側
ローダ
m<10 t
1.2 m
1.2 m
1.2 m
1.2 m
ローダ
10 t≦m≦30 t
1.5 m
1.5 m
1.5 m
1.2 m
スキッドステアロ
ーダ
全形式−車輪式
及び履帯式
1.2 m
1.2 m
図A.10に示す
ようにRBに
て1.5 m
1.2 m
図A.10に示す
ようにRBに
て1.5 m
1.2 m
図A.10に示す
ようにRBに
て1.5 m
ドーザ
m≦18 t
1.5 m
1.5 m
1.5 m
1.2 m
ミニショベル
m<6 t
1.0 m
1.0 m
1.2 m
1.0 m
ショベル系掘削機
6 t≦m≦40 t
1.2 m
1.2 m
1.2 m
1.2 m
バックホウローダ
m≦15 t
1.2 m
1.2 m
1.2 m
1.2 m
固定フレーム式ダ
ンパ
m≦50 t
1.2 m
1.2 m
1.2 m
1.2 m
前部荷台式ダンパ
m<3 t
3 t≦m≦10 t
1.2 m
1.2 m
1.2 m
1.5 m
1.2 m
1.5 m
1.2 m
1.2 m
車体屈折(アーテ
ィキュレートフレ
ーム)式ダンパ
m<10 t
1.2 m
1.2 m
1.2 m
1.2 m
車体屈折(アーテ
ィキュレートフレ
ーム)式ダンパ
10 t≦m≦50 t
1.5 m
1.5 m
1.5 m
1.2 m
グレーダ
m<15 t
1.5 m
1.2 m
1.2 m
1.2 m
ランドフィルコン
パクタ
m<10 t
10 t≦m≦35 t
1.2 m
1.5 m
1.2 m
1.5 m
1.2 m
1.5 m
1.2 m
1.2 m
ローラ
m<10 t
10 t≦m≦25 t
1.0 m
1.2 m
1.0 m
1.2 m
1.0 m
1.2 m
1.0 m
1.2 m
10.3 直接視界による視界性能基準を超える遮影
直接視界が10.1に規定する視界測定円(VTC)及び10.2に規定する機側長方形境界(RB)での視界性
能基準に適合しない場合,次の補助装置による視界確保を考慮しなければならない。
a) 鏡を使用した間接視界の併用
b) 例えば,監視カメラのような視覚補助装置を使用した視界の併用
補助装置の併用によって視界が10.1及びその表1並びに10.2に規定する性能基準に適合する場合,当該
機械はこの規格の要求事項に適合する。
19
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号
CP 運転室建屋の支柱
P1
電球間隔65 mmでの遮影
P2
電球間隔205 mmでの遮影
P3
電球間隔405 mmでの遮影
図6−電球間隔と遮影との関係の例
10.4 (表1及び表2の範囲外の)大形土工機械,派生土工機械及びほかの形式の土工機械に対する要求
事項
10.4.1 大形機械
機械の運転質量が表1及び表2に記載する範囲を超える大形の機械に対しても,製造業者は,この規格
で,各機種の中で最大質量のものに対して規定した測定及び性能基準を適用するのがよい。
性能基準を満足できない機械に対し,製造業者は,10.4.3に従ってリスクアセスメントを実施し,機械
周囲で運転員が見る必要がある領域を規定し,その領域を見るための視覚補助装置を提供しなければなら
ない。
運転質量50 t以上のブルドーザで,単一シャンクのリッパを装着するものでは,その単一シャンクのリ
ッパの構造部よりも後方の遮影は,許容される。
視界性についてのリスク領域が残留する場合,取扱説明書に,その機械の視界性のリスク領域を識別し,
その機械の安全な使用のためには,現場対策が必須であることを推奨しなければならない。
10.4.2 派生土工機械及びほかの形式の土工機械
表1及び表2に含まれないほかの形式の土工機械(JIS A 8308に記載した機種の組合せを含む。)又は派
生土工機械について,製造業者は,この規格に規定した測定方法及び性能基準を適用するのがよい。これ
らの機械には,表1及び表2に記載の機械のうち設計及び用途の点で最も類似した機種に対する性能基準
20
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を適用するのがよい。これらの機械がその性能基準を満足できない場合,製造業者は,10.4.3に従ってリ
スクアセスメントを実施し,機械周囲で運転員が見る必要がある領域を規定し,その領域を見るための視
覚補助装置を提供しなければならない。取扱説明書は,その機械の視界性のリスク領域を識別し,その機
械の安全な使用のための,現場対策の必要事項を規定しなければならない。
10.4.3 表1及び表2の範囲外の大形土工機械,派生土工機械及びほかの形式の土工機械のリスクアセスメ
ント手順
大形土工機械,派生土工機械及びほかの形式の土工機械の運転員の視界に関係するリスクは,機械の安
全な運転のために運転員が見る必要のある領域を定義するリスクアセスメント手順によって評価しなけれ
ばならない。そのようなリスク領域は,機械の前側及び機械の後側を含み,機械が動き又は向きを変えて
いくところで,機械のかじ取り能力も関連する。ほかのリスク領域は,人が機械に近寄ることがある乗降
用設備の入口箇所である。機械のその他の特定のリスク領域もまた,評価するのがよい。
10.4.4 視界測定円(VTC)及び許容される遮影幅
大形,派生形及びほかの形式の土工機械の評価では,視界測定円(VTC)を大きくしてもよい(その場
合24 mを推奨)。また,遮影の幅は,大きくなった測定円と標準の12 m視界測定円(VTC)との比に比
例して増やしてもよい。
11 試験報告書
試験報告書は,11.1による機械の仕様及び11.2に従った図を含まなければならない。
11.1 機械仕様
機械仕様には,次の事項を記載する。
a) 製造業者名
b) 機械型式
c) JIS A 8320に従った運転質量(空荷)
d) 製造番号(適宜)
e) 運転室又は転倒時保護構造の説明又は識別
f)
機械に装着した作業装置
g) その他視界測定に影響する情報
h) 視界測定時の機械構成の写真(又は説明図)
i)
附属書Aに図示した測定時の位置寸法(作業装置高さHH及び作業装置半径RR)の記録
j)
(装着の場合)視覚補助装置の形式,仕様及び位置の説明
11.2 図面
ある特定の光源電球間隔を用いて測定した扇形視野各部の,視界測定円(VTC)上における遮影(単位
mm)を含む直接視界及び間接視界の静的測定結果を図面で示さなければならない。この図には遮影の間
隔及び位置を記入しなければならない。これに加えて,機側長方形境界(RB)における遮影も図示しなけ
ればならない。
12 運転取扱説明書での視界の説明
運転員が機械を運転するとき視界に起因する危険源を最小限とするため,運転取扱説明書には次の事項
を含めなければならない。
a) 機械を運転するときに自分の視野を確認すべきことの推奨
21
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 鏡又は視覚補助装置(監視カメラ)を装着している場合,その位置,調節及び使用についての告知
c) 視覚補助装置の視界を保つために清浄とする必要性についての推奨
d) 10.4に規定する機械に関しては,死角による危険源を最小とするため,適切な現場での対策が必要で
ある旨の告知
e) 機械の実際の使用者が機械構成に視界の制約を生じるような改造を行った場合,改めてリスクアセス
メントを実施(この文書をその目的のために使用してもよい)する必要がある旨の告知
22
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
作業装置高さ(HH)及び作業装置半径(RR)の寸法
及び位置並びに機側長方形境界(RB)
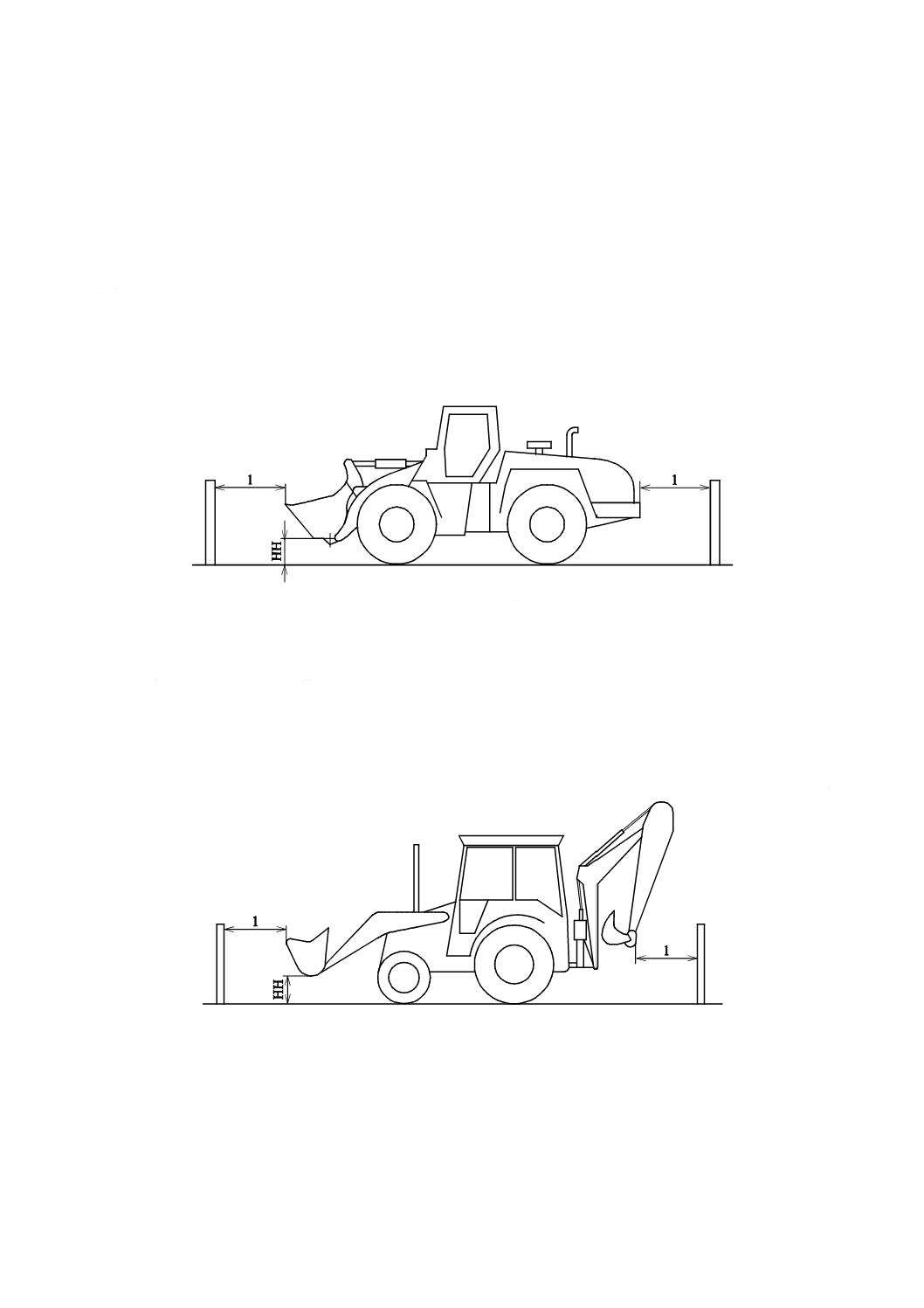
A.1 ローダ
ローダバケットは,運搬姿勢とする。作業装置高さ(HH)は,300 mm±50 mmとする。
ローダ作業装置の機械を,図A.1に示す。
単位 m
図A.1−ローダ
A.2 中央ピボット式バックホウローダ
ローダバケットは,運搬姿勢とする。作業装置高さ(HH)は,300 mm±50 mmとする。
バックホウバケットを運搬姿勢にしたときの機械周囲に接する最小長方形を使用して,機側長方形境界
(RB)を決定する。中央ピボット式バックホウ作業装置の機械を,図A.2に示す。
単位 m
図A.2−中央ピボット式バックホウローダ
23
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
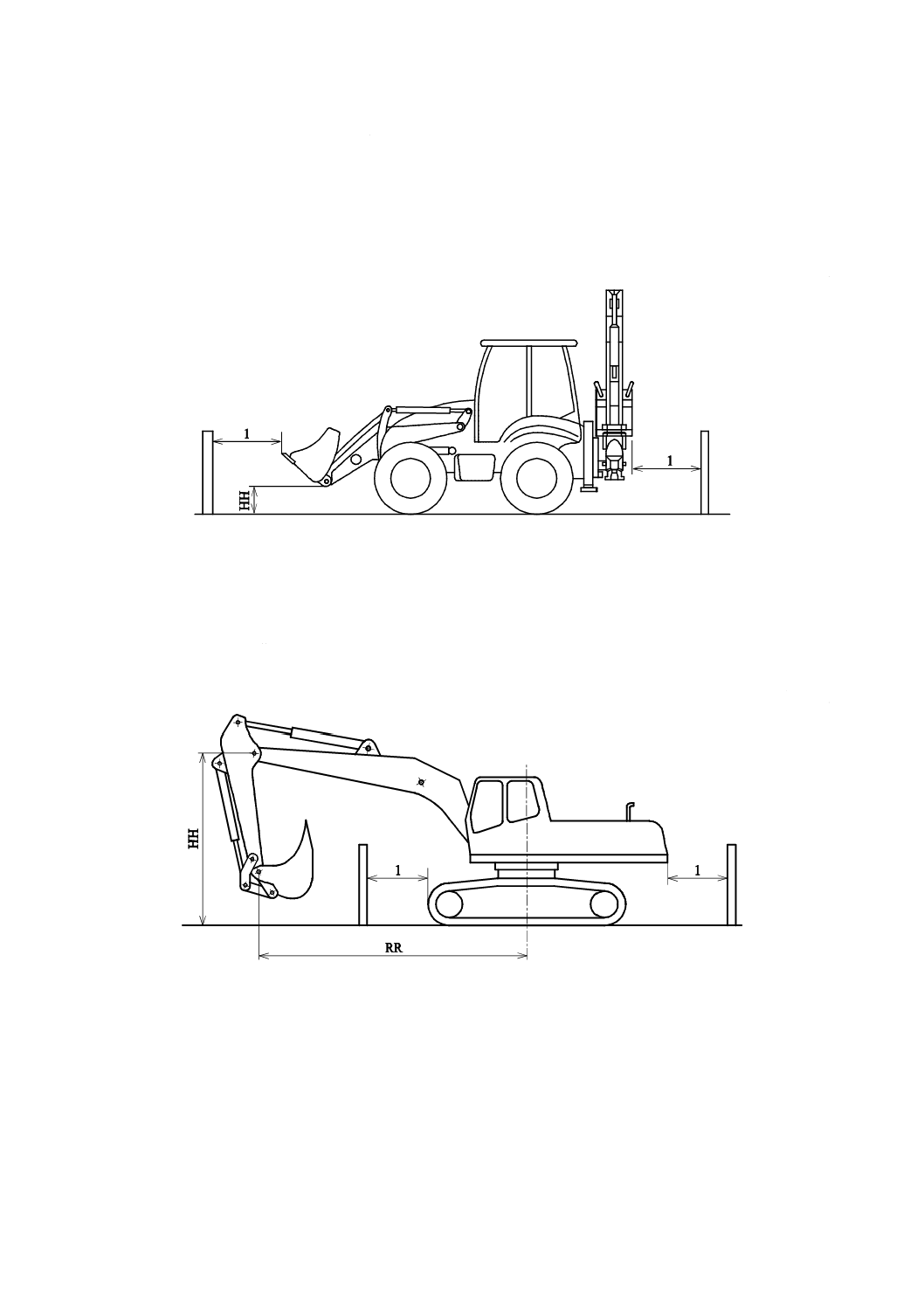
A.3 サイドシフト式バックホウローダ
ローダバケットは,運搬姿勢とする。作業装置高さ(HH)は,300 mm±50 mmとする。
バックホウバケットを運搬姿勢にしたときの機械周囲に接する最小長方形を使用して,機側長方形境界
(RB)を決定する。サイドシフト式バックホウ作業装置の機械を図A.3に示す。
単位 m
図A.3−サイドシフト式バックホウローダ
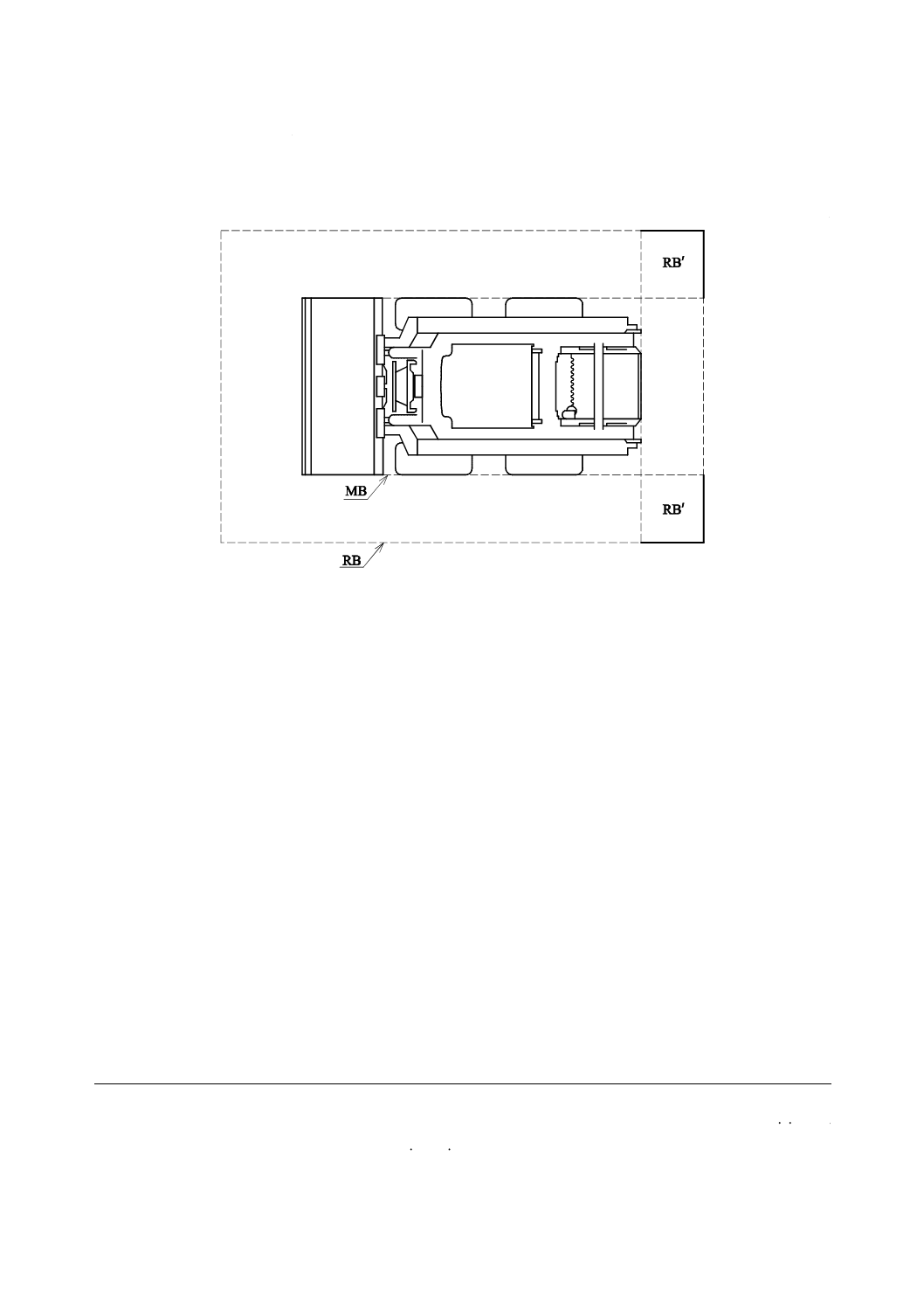
A.4 ショベル系掘削機
機械は,図A.4に示した状態とする。履帯の前端又は排土板が標準装備の場合は排土板前端(のいずれ
か前方にあるもの)(JIS A 8403-1参照)を,機械本体周囲の機側長方形境界(RB)を決定するのに用いる。
単位 m
図A.4−ショベル系掘削機
24
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
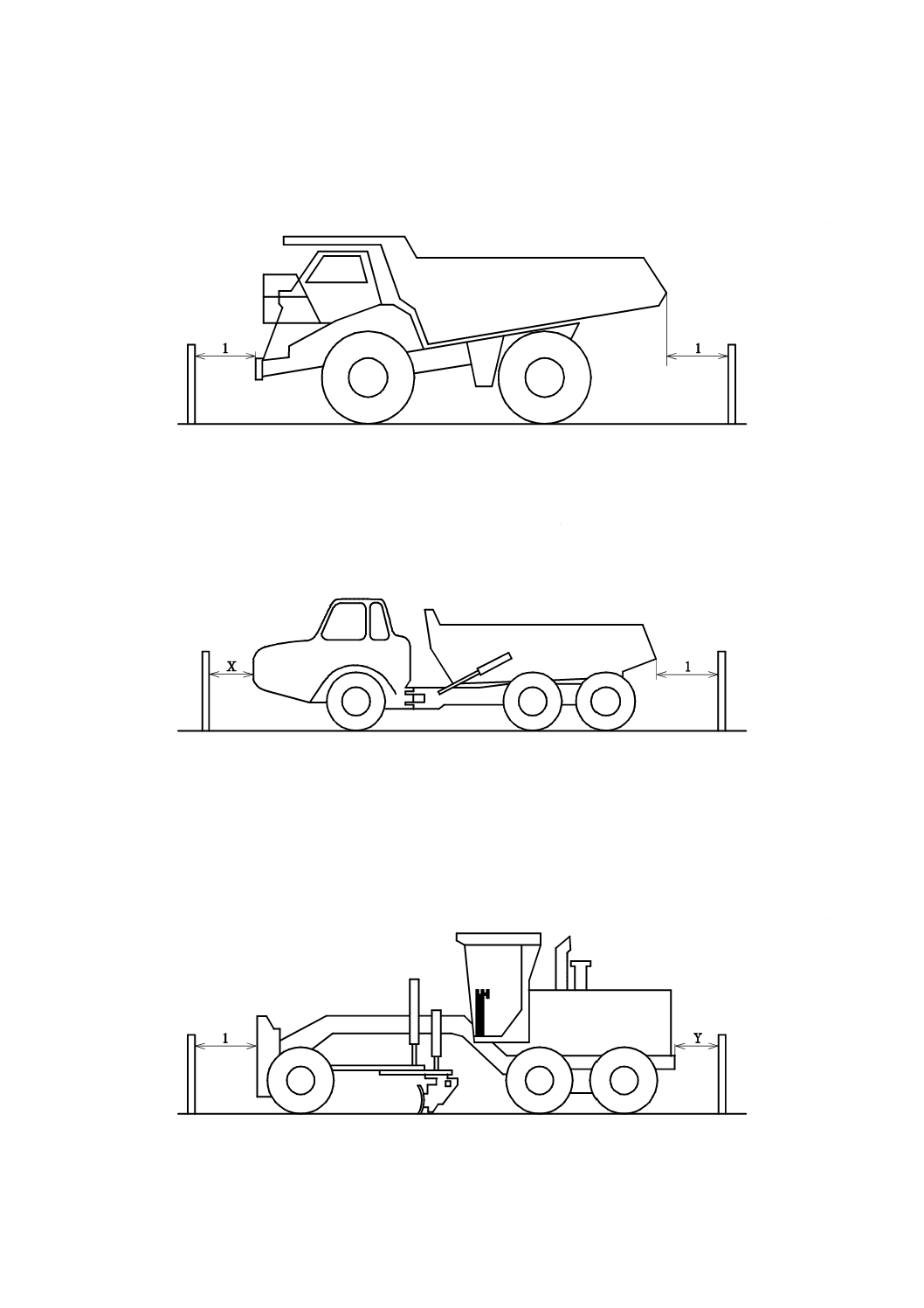
A.5 固定フレーム式ダンパ(重ダンプトラック)
図A.5に示したように機側長方形境界(RB)を,位置決めする。
単位 m
図A.5−固定フレーム式ダンパ(重ダンプトラック)
A.6 車体屈折(アーティキュレートフレーム)式ダンパ(重ダンプトラック)
寸法Xは,表1による。後部での寸法1 mは,機械の側方にも適用する(図A.6参照)。
単位 m
図A.6−車体屈折(アーティキュレートフレーム)式ダンパ(重ダンプトラック)
A.7 グレーダ
排土板は,基準地表面から50 mm±50 mmの高さの位置とする。
寸法Yは,表1による。前部での寸法1 mは,機械の側方にも適用する(図A.7参照)。
単位 m
図A.7−グレーダ
25
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
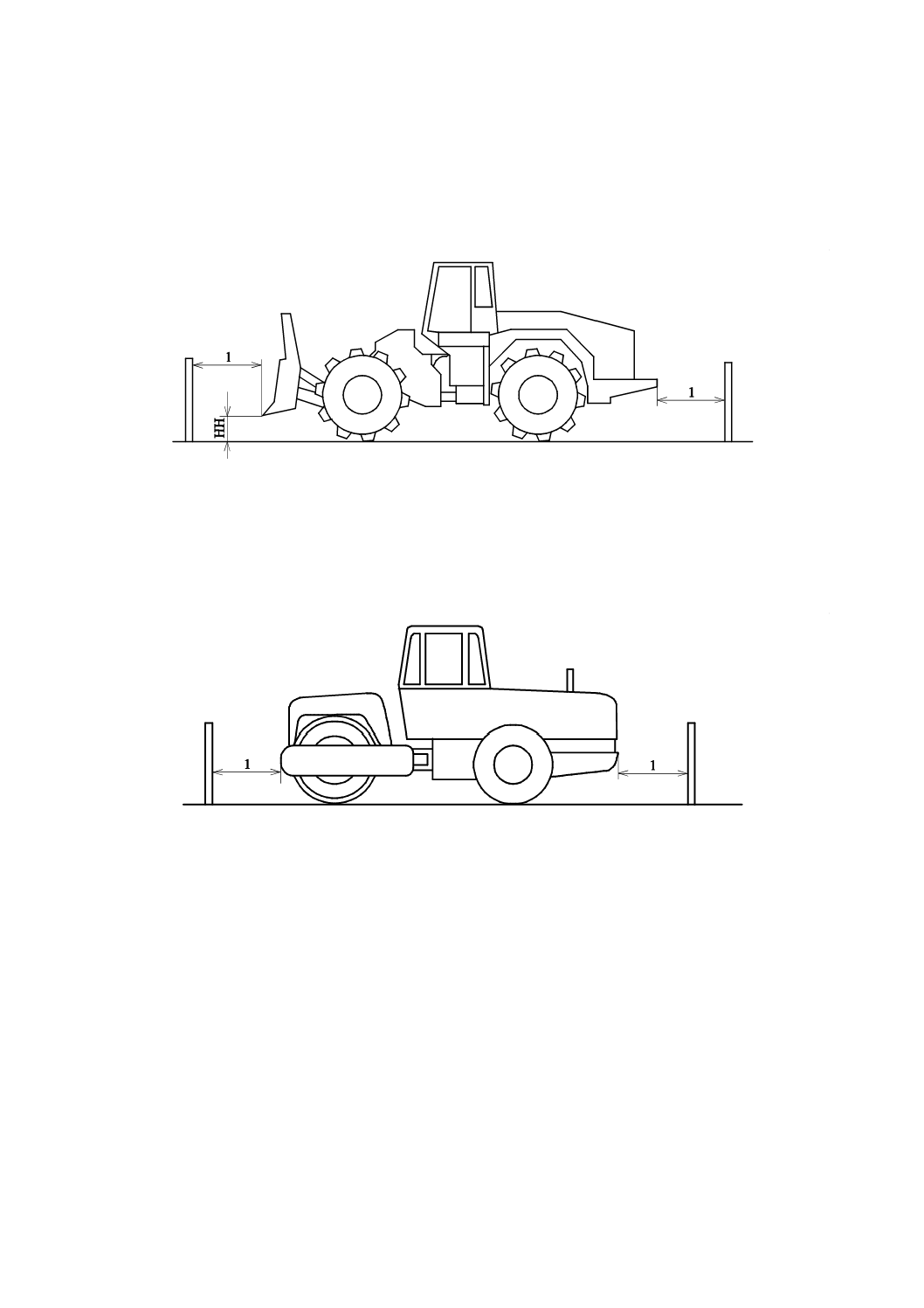
A.8 ランドフィルコンパクタ
図A.8に示したように機側長方形境界(RB)を,位置決めする。作業装置高さ(HH)は,150 mm±50
mmとする。
単位 m
図A.8−ランドフィルコンパクタ
A.9 ローラ
図A.9に示したように機側長方形境界(RB)を,位置決めする。
単位 m
図A.9−ローラ
26
A 8311:2018 (ISO 5006:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.10 スキッドステアローダ
図A.10に示したように機側長方形境界(RB)を,位置決めする。
単位 m
図A.10−スキッドステアローダ
参考文献 [1] JIS A 8333規格群 土工機械−後写鏡及び補助ミラーの視野
注記 対応国際規格:ISO 14401 (all parts),Earth-moving machinery−Field of vision of
surveillance and rear-view mirrors